1. Introduction
Modeling problems of mathematical physics on Hopfield neural networks (HNN) is based on modeling of an artificial neuron implemented as an electronic circuit by a nonlinear ordinary differential equation. Within this approach, the
i-th neuron connected to the
N neurons of the network (including itself) is modeled by the system of differential equations
where
are the synaptic weights of the neurons,
are the currents representing an external bias,
are the induced local fields at the input of the nonlinear activation functions
,
and
are the leakage resistances and the leakage capacitances, respectively.
Since the 1980s, the methods of modeling numerical solutions on artificial neural networks have attracted a serious attention [
1,
2,
3,
4,
5,
6,
7,
8,
9,
10,
11,
12]. A detailed bibliography of the works carried out in this direction can be found in [
1,
2,
3,
4,
5,
12]. The books [
1,
4,
5] are of encyclopedic character. They describe—with different degrees of detail—the most principal results concerning the architecture, training and practical applications of artificial neural networks (ANN). The article [
13] is a pioneering one; it has demonstrated an opportunity in solving computational problems with the devices assembled from a large number of quite simple standardized elements. The paradigm of Hopfield neural networks has also been introduced in this work.
Some of the listed works are devoted to solving of particular problems on the basis of artificial neural networks. For instance, the works [
14,
15] concern the optimization problem, the works [
16,
17] describe solving linear and nonlinear algebraic equations with neural networks, and the works [
3,
7,
9,
10,
11] exploit the application of ANN to ordinary and partial differential equations. The work [
6] is devoted to a more difficult and special problem of solving Diofant equations. General problems of information science are elucidated in the context of ANN in the book [
2]. The problem of dynamical system parametric identification with HNNs is described in [
18].
Along with modeling known numerical methods on artificial neural networks, it is of interest to develop special modeling methods designed to solve problems of mathematical physics with the ANNs and, first of all, with the HNNs. One of these methods is the continuous operator method [
19]. Here is a brief overview of the works carried out in this direction.
The predecessors of the HNN are, to some extent, analog computers.
In the second half of the 20th century, a separate direction in computer technology associated with analog computers was actively developing. Analog computers had a high performance (operations performed at the speed of light), but low accuracy due to imperfection of the element base, and by the end of the century, they were ousted from many fields of application, in particular, from computational mathematics, by digital computers. Currently, analog computers are used as part of specialized control systems. However, we note that recently there has been a renaissance in relation to analog computers, albeit on a different element base [
20].
Note that analog computers are used to solving the following systems of nonlinear differential equations
Here, are real numbers, are continuous functions, and are continuous functions. The parameter T is determined by the problem to be solved and the design of the machine, and H is determined by the design of the machine.
From the comparison of Equations (
1) and (
2), it follows that the fields of applications of Hopfield’s neural networks and analog computers coincide. Therefore, the results presented in this article in terms of Hopfield neural networks are applicable to analog computers. A detailed presentation of the methods for solving systems of algebraic and ordinary differential equations on analog computers can be found in [
21].
A review of works devoted to approximate methods for solving systems of algebraic equations and systems of ordinary differential equations on analog computers and NNH shows that regular (not singular) equations have mostly been solved.
Meanwhile, a large class of problems from various branches in mathematics, physics and engineering has come out of NNH applications. They are ill-posed problems in a Hadamard sense, spectrum problems, inverse problems and many others. Applying the continuous operator method [
19] to solve various ill-posed problems (coefficient problems for parabolic and hyperbolic equations, solving systems of linear algebraic equations with non-inversible matrices) has demonstrated the capabilities of the method.
Obviously, the continuous operator method can be implemented directly on NNH of any technological origin. This extends the range of problems implemented on NNH.
The main goal of this work is to demonstrate the relations between the continuous method for solving nonlinear operator equations and NNH, and, thereby, to extend the range of problems solved on NNH.
In [
13], J.J. Hopfied researched the application of “biological computers” to computer design. The architecture of machines built by analogy with biological objects is based on a very large number of interconnected and very simple computing nodes of the same type, called neurons.
In the article [
14], J.J. Hopfied and D.W. Tank have demonstrated the possibility of implementing such computers, called Hopfield neural networks, using simple circuits made up of resisters, capacitors and inductors. In [
14], the energy function was introduced and the stability of neural networks was studied based on the second Lyapunov method. Note that the stability of Hopfield neural networks [
22], Ref. [
23] has been studied based on the first Lyapunov method.
Starting from [
13,
14], Hopfield neural networks began to be widely used to solve optimization problems [
15], matrix inversion [
16], and parametric identification of dynamic systems [
18]. In [
17], Hopfield neural networks are applied to solve systems of nonlinear algebraic equations.
In works known to the authors, numerical methods for solving problems of mathematical physics on artificial neural networks (ANN) are based on methods for minimizing the corresponding functionals.
In this paper, we review the works of the authors devoted to methods for solving the equations of mathematical physics on the HNN. These methods are based on conditions for stability of the solutions to systems of ordinary differential equations.
Stability of the neural network is crucial for modeling numerical methods with the network. Usually, stability of the network is substantiated on the grounds of symmetry of the synaptic matrix, and the HNN energy is used as the Lyapunov function. Here, we obtain more general stability conditions that are applicable even for non-symmetric synaptic matrices.
2. Notation and Basic Definitions
Let us first introduce the notation used in the work.
Let
B be a Banach space, and
,
K is a linear operator on
B,
is the logarithmic norm [
24] of the operator
K,
is the conjugate operator to
K, and
I is the identity operator.
The analytical expressions for logarithmic norms are known for operators in many spaces. We restrict ourselves to a description of the following three norms. Let , , be a matrix. In the n-dimensional space of vectors the following norms are often used:
octahedral—
cubic—
spherical (Euclidean)—
Here are the analytical expressions for the logarithmic norm of a matrix consistent with vector space norms given above:
octahedral logarithmic norm
cubic logarithmic norm
spherical (Euclidean) logarithmic norm
where
is the conjugate matrix for
Note that the logarithmic norm of the same matrix can be positive in one space and negative in another. Moreover, it is known that a linear combination with positive coefficients of any finite number of norms is also a norm.
The logarithmic norm has some properties very useful for numerical mathematics.
Let be matrices with complex elements and , , , are n-dimensional vectors with complex components. Let the following systems of algebraic equations: and be given. The norm of a vector and its subordinate operator norm of the matrix are agreed upon; the logarithmic norm corresponds to the operator norm.
Theorem 1 ([
25])
. If , the matrix A is non-singular and . Theorem 2 ([
25])
. Let , and , . Then Some properties of the logarithmic norm in a Banach space which are useful in numerical mathematics are given in [
24].
3. Continuous Methods for Solving Operator Equations
Extensive literature is devoted to approximate methods for solving nonlinear operator equations, and a detailed bibliography on this subject can be found in the books [
26,
27]. At the same time, discrete methods have mainly been considered, among which, first of all, we should note the methods of simple iteration and Newton-Kantorovich. The study of continuous analogues of the Newton-Kantorovich method began, apparently, with the article [
28]. Later, continuous analogs of the Newton-Kantorovich method were widely used for solving numerous problems in physics [
29,
30].
Let us present several statements about continuous methods for solving operator equations, which will be used below when substantiating computational methods.
Let the nonlinear operator equation
map from the Banach space
B to
B. Here,
is a non-linear operator.
Consider the Cauchy problem in a Banach space
BWe assume that the operator A has a continuous Gateaux (Frechet) derivative.
Theorem 3 ([
19])
. Let Equation (3) have a solution On any differentiable curve in Banach space the inequalityholds. Then, the solution of the Cauchy problem (4) converges to the solution of Equation (3) for any initial value . Theorem 4 ([
19])
. Let Equation (3) have a solution Let the following conditions be satisfied on any differentiable curve in a ball :(1) for any , the inequalityholds; (2) the following equality is true: Then, the solution of the Cauchy problem (4) converges to the solution of Equation (3) for any initial value . If the conditions (
6) and (
7) are not satisfied, it is necessary to transform Equation (
3) and the Cauchy problem (
4). For this purpose, we employ a symmetrizing version of the operator. The symmetrization is performed by an adjoint derivative operator acting on Equation (
3) from the left. As a result, the derivative of the operator becomes symmetric and non-negative. Let
be the Gateaux (Frechet) derivative of operator
We will transform Equation (
3) to the form
where
is the operator conjugated to
.
Equation (
8) is associated with the Cauchy problem
The following statement is valid.
Theorem 5. Let Equation (8) have a unique solution in the ball Let the following conditions be satisfied for any differentiable curve laying in the ball : (1) for any , the inequalityoccurs; (2) the equalityis valid. Then, the solution of the Cauchy problem (9) and (10) converges to the solution of Equation (8) for any initial value . The proof of the theorem is based on the sufficient condition for stability of solutions of differential equations in Banach spaces.
Let the differential equation be in a Banach space
B
where the nonlinear operator
has a Gateaux derivative,
, and the spectrum of the operator
is in the left half-plane of the complex plane and on the imaginary axis.
Theorem 6 ([
31])
. Let the following conditions be satisfied on any differentiable curve φ that lays in the ball : (1) (2) Then, a trivial solution to Equation (13) is asymptotically stable. The validity of Theorem 5 follows from this statement. Indeed, the spectrum of the operator
is in the left half-plane of the complex plane and on the imaginary axis. The asymptotic stability for the solution of Equation (
9) for any initial value in the ball
follows from Theorem 6. Thus,
and
Therefore, the solution of Equation (
9) converges to the solution
If conditions (
11) and (
12) are not met, it is necessary to use regularization. Consider the Cauchy problem
Here, is a regularization parameter.
The Cauchy problem (
14) has a solution for any initial value. Moreover, this solution satisfies the equation
and does not satisfy Equation (
8).
The continuous method for solving nonlinear equations has the advantages over the standard Newton-Kantorovich method. They are:
- (1)
The existence of an inverse operator is not required for the Gateaux (Frechet) derivative of the nonlinear operator;
- (2)
If the inequality holds on any differentiable function then the convergence of the method does not depend on initial conditions.
4. Representation of Functions of Multiple Variables on Hopfield Neural Networks
In this section we study the methods of representation for functions of multiple variables and for localization of the minimum (maximum) of such functions using an artificial neural network.
When constructing neural networks for solving numerous problems in physics and engineering, the problem of representation for the functions of multiple variables on neural networks arises. The issue is due to the fact that the Hopfield networks compute linear and nonlinear functions of one dynamic variable. They also perform superposition and addition operations when networks [
3,
5] are cascaded. Therefore, algorithms for representing multiple variables’ functions by superpositions of one variable’s functions and the addition operation are of great interest. Representations of multiple variables’ functions by superpositions of one variable’s functions and the addition operation were obtained by V.I. Arnold and A.N. Kolmogorov [
32,
33]. The representations have a rather complicated form. Their application to designing neural networks is difficult. Thus, the exact representation of multiple variables’ functions on neural networks is hardly possible, and approximate methods are of considerable interest.
An approximate method for function representation on neural networks is based on Stone’s [
2] theorem. The possibility of approximating multiple variables’ functions with any degree of accuracy by superpositions and linear combinations of one variable’s functions was studied in [
2,
4]. An important question of approximation accuracy, and especially of the choice of the best basis, are open. A number of research results and an extensive literature on representation of continuous functions with neural networks is given in [
34].
The second approach to an approximate representation of functions of multiple variables by functions of one variable uses various sweep methods [
35]. However the application of these methods in neural networks seems to be problematic. Therefore, it is of interest to develop an easy-to-implement and sufficiently accurate approximate method for representing multiple variables’ function in neural networks. One of such methods is presented below. Note that this method also allows us to find extreme values of functions of multiple variables.
Today, the problem of finding the extreme values of functions of multiple variables is widely studied. A detailed literature review on the subject can be found in [
35].
Let . Let be prime numbers, .
Show that the extreme values of the function
are approximated with high degree by the extreme values of the function
. It is sufficient to consider the minimum of the function. We assume that the function
satisfies the Lipschitz condition
Without loss of generality, we assume that the function in D has a unique maximum at . Let yield its maximum at .
Let be a residue class t modulo The set , for form a set of parallel lines, which for intersect at . Obviously, .
Let . We want to prove .
Let
be the value of
t such that
, and
yields its minimum
. However, from (
16), it follows that
.
Thus, it was shown that the extreme value of is located at near .
Take several sets of natural numbers . Find the minima of the functions . Construct near , , of points , , .
The extreme point is at the intersection of the neighborhoods.
This way the problem of the extreme values of multiple variables’ functions is reduced to the problem of finding the extreme values of functions of one variable. Numerous works are devoted to the solution of the latter problem on artificial neural networks (see [
3,
5]).
5. Multiple Integrals’ Evaluations on Hopfield Neural Networks
This section is devoted to evaluation of multiple integrals of periodic functions
on Hopfield networks. The suggested method is applied to the evaluation of multiple variable integral of any finite dimension. Without loss of generality, we consider two-dimensional integrals. The method for evaluating integrals of multiple variables’ functions
was presented in [
36]. It was suggested that functions expand in a Fourier series. An accuracy estimation of the method on certain classes of functions was also given.
The method is based on the following statement ([
36,
37]).
Lemma 1. Let be a continuous periodic function with respect to each variable, and N is a natural, are prime and Then,wherewhere is the best approximation of by a trigonometric polynomial of N degree with respect to each variable. The convergence rate is defined in terms of constants C that here do not depend on N, and the functional classes are defined as follows.
Evaluating the integral in the right-hand side of (
17) with the rectangle quadrature formula, we have
where
are prime numbers,
Recall the definition of the class of functions Let the function be continuous in an l-dimensional cube defined by the inequalities and be periodic with a period in each variable . stands for the Fourier coefficients of the function. We also introduce defined as for , and for . We say that belongs to the class , if , where , and the constant A does not depend on .
One can evaluate multiple periodic function integrals on Hopfield networks by formula (
17). To do so, it is enough to solve the Cauchy problem
This method for integral evaluation can be used to calculate the Fourier coefficients of multiple variable functions on the basis of trigonometric functions.
6. Approximate Solution of Systems of Algebraic Equations on Hopfield Neural Networks
Consider the system of linear algebraic equations
where
Let the logarithmic norm of matrix A be negative.
We associate the system of algebraic Equations (
20) with the Cauchy problem
From results of
Section 2, it follows that for
, the solution of the Cauchy problem (
21) converges to the solution
of the system of algebraic Equations (
20) for any initial value
.
Thus, modeling the Cauchy problem (
21) on Hopfield neural networks is possible for sufficiently large values of
t to obtain a good approximation to the solution of the system (
20). It is easy to see that the solution is stable to perturbation of the initial values for Cauchy problem (
21). It is also stable to the perturbation of the coefficients and right-hand sides of Equation (
20). The proof of this statement and the corresponding theorems can be found in [
38].
Consider the application of the continuous operator method for solving systems of nonlinear algebraic equations on Hopfield neural networks. For generality, we assume operator equations in Banach spaces.
Consider the nonlinear operator equation
acting from the Banach space
X to
Here,
is a non-linear operator.
Let the Equation (
22) have an isolated solution
Let us consider the Cauchy problem
By Theorem 4, if for any smooth curve
defined in the ball
of a Banach space
B, the inequalities
hold, then
Remark 1. Examples of implementations can be found in [
38].
7. Approximate Solutions for Fredholm Integral Equations on Hopfield Neural Networks
In this section we solve Fredholm integral equations on Hopfield neural networks. For demonstration, we will use a one-dimensional integral equation of the second kind
with continuous kernels in the right-hand side.
Weakly singular integral equations and multidimensional integral equations are treated similarly.
Let Equation (
25) have an isolated solution
in
The approximate solution
(
25) is obtained from the system of equations
where
and
are coefficients and nodes of the quadrature formula
It is essential to take
In [
27] (Theorem 19.5, Chapter 4), solvability conditions of system (
26) were presented. The convergence of approximate solutions
of (
26) to exact solutions
of (
25) using nodes
,
was also demonstrated.
We set the following condition to the function : at any interior point of in space there exists the derivative , . Here, stands for the partial derivative with respect to the third variable.
Consider the matrix , where , ; , .
It follows from Theorem 4 that if
for
then the solution of the system of differential equations
converges to the solution
of the system of Equation (
26) at the nodes
,
.
We illustrate the method described above with solving the following equation:
The exact solution of the equation reads
. Equation (
28) has been approximated with a system of 10 ordinary differential equations, solved using Euler’s method with a time step
In
Table 1 we show the numerical error as a function of the number of iterations
N.
8. Approximate Solution of Linear Hypersingular Integral Equations on Hopfield Neural Networks
Let us recall the Hadamard definition of hypersingular integrals [
39]. The integral of the type
for an integer
, is defined as the limit of the sum
at
if one assumes that
has
p derivatives in the neighborhood of the point
b. Here,
is any function that satisfies the following two conditions:
- (i)
The above limit exists;
- (ii)
has at least p derivatives in the neighborhood of the point .
An arbitrary choice of is unaffected by the value of the limit in the condition (i). The condition (ii) defines values of the () first derivatives of at a point b, so that an arbitrary additional term in the numerator is an infinitely small quantity, at least of order .
Chikin in [
40] introduced the definition of the Cauchy–Hadamard-type integral that generalizes the notion of the singular integral in the Cauchy principal sense and in the Hadamard sense.
The Cauchy–Hadamard principal value of the integral
is defined as the limit of the following expression
where
is a function constructed so that the limit exists.
Consider the one-dimensional linear hypersingular integral equation
We impose the following conditions on the coefficients and the right-hand side of Equation (
31):
- (1)
- (2)
- (3)
Equation (
31) is uniquely solvable and its solution
Introduce nodes and Let be intervals
An approximate solution (
31) is sought in the form of piecewise constant functions
The values
are determined from the system of linear algebraic equations
The following statement is true.
Theorem 7 ([
38,
41])
. Let the following conditions be satisfied: (1) Equation (31) has the unique solution ; (2) the inequality holds for ; (3) the function is satisfied the Lipschitz condition with respect to the second variable. Then, for sufficiently large N, the system of Equations (33) has the unique solution .
The conditions of Theorem 7 are sufficient for the system of Equations (
33) to be solved on Hopfield neural networks.
System (
33) should be represented in the form
.
When the conditions given in
Section 2 are met, the solution of the system
for
converges to solution of the system (
34) for any initial value.
Note that the conditions of Theorem 7 guarantee just a unique solvability for the system (
33). To prove the convergence of the approximate solution of Equation (
31) to its exact solution, one has to construct a more complicated algorithm.
In doing so, let
. Divide the interval
into
subintervals at the points
. We seek an approximate solution of (
31) in the form of a piecewise continuous function
where
, is a family of basis functions.
For nodes
the corresponding basis elements are determined by
For boundary nodes
and
, the corresponding basis elements are defined as
and
The coefficients
in (
36) are determined from the following system of linear algebraic equations and obtained by approximating the kernel
with a polygon and applying a collocation procedure
The system (
40) can be rewritten as
Here,
indicates a summation over
. The system (
41) is equivalent to the system
The system (
42) can be written in the matrix form
where
,
,
,
. The values of
,
and
are determined by matching to the corresponding terms in (
42).
The cubic logarithmic norm of the matrix
D is estimated as
If
by Theorem 2 we can see that the system (
31) has a unique solution
and
It is obvious that
is a solution of the system of Equation (
41).
Let
and
be solutions of (
40) and (
41) respectively.
Theorem 8. Let the following conditions be satisfied:
Equation (31) has the unique solution For all , it holds that
where indicates a summation over
Then, the system of Equation (40) has a unique solution and the following estimate holds . The system of Equation (
35) can be solved by any numerical method. Examples of solving linear hypersingular integral equations by the continuous operator method are given in [
38].
Let us now study approximate methods for solving nonlinear hypersingular integral equations
Consider Equation (
43) with
An approximate solution of (
43) is sought in the form of a piecewise constant function (
32), in which coefficients are determined from the system of nonlinear algebraic equations
where
Write Equation (
44) in the operator form
where
is
a matrix.
We assume that Equation (
44) has a solution
in the ball
in the space
and for any differentiable curve
, the inequality
holds.
Then, the solution of the system of differential equations
converges to the solution
of the systems of Equations (
44).
Remark 2. If p is odd, the algorithms proposed and justified in [
42]
should be used as a basis to construct computational process. Remark 3. Study in Section 6 is based on numerical results provided in [
38].
9. Continuous Method for Solving Gravity Exploration Problems
Introduce a Cartesian rectangular coordinate system with the axis pointing down.
If an ore body is located at the depth of
its lower surface coincides with the plane
and the upper surface is described by function
with a non-negative function
and
then the gravitational field on Earth’s surface is described by the equation
where
G is the gravitational constant;
is the density of the body.
It is assumed that the density outside the body and that the density is differentiable with respect to
To simplify further calculations, we assume that the density does not depend on
Then, we obtain the equation
Linearization of Equation (
46) leads to
Below, we assume that the density is constant and, for convenience, let
Represent Equation (
47) in the form
The problem of logarithmic potential leads to nonlinear integral equations
where
is an function describing the surface of a body;
is the depth of body location.
Linearization of Equation (
49) leads [
43] to linear integral equation
A detailed review of the literature of approximate methods for solving inverse problems of gravity exploration is given in [
44,
45,
46].
In [
47], the nonlinear Equation (
45) is approximated by a simpler nonlinear equation
Here, H is the depth of the body location, is its density, and stands for the contact surface shape.
Similarly, Equation (
49) is approximated by
There are three unknown variables in (
51). They are the depth of the gravitating body
H, the density of the body
and the shape of the contact surface
. To find them it is necessary to have three linear and independent information sources.
Assume that gravity field values are known on surfaces
,
,
Denote
,
,
by
,
,
, respectively. Suppose
,
,
in (
51), and we have
Introduce functions
,
. This way, the system (
53) is turned into a linear system of new variables
Applying the Fourier transformation to (
54), we have
To solve the systems (
54) and (
55) we used a continuous method for solving nonlinear operator equations similar to the methods for Fredholm integral equations and for systems of algebraic linear equations described above. The detailed description of computations and their justification is given in [
47]. More details on the logarithmic potential case can be found in [
48].
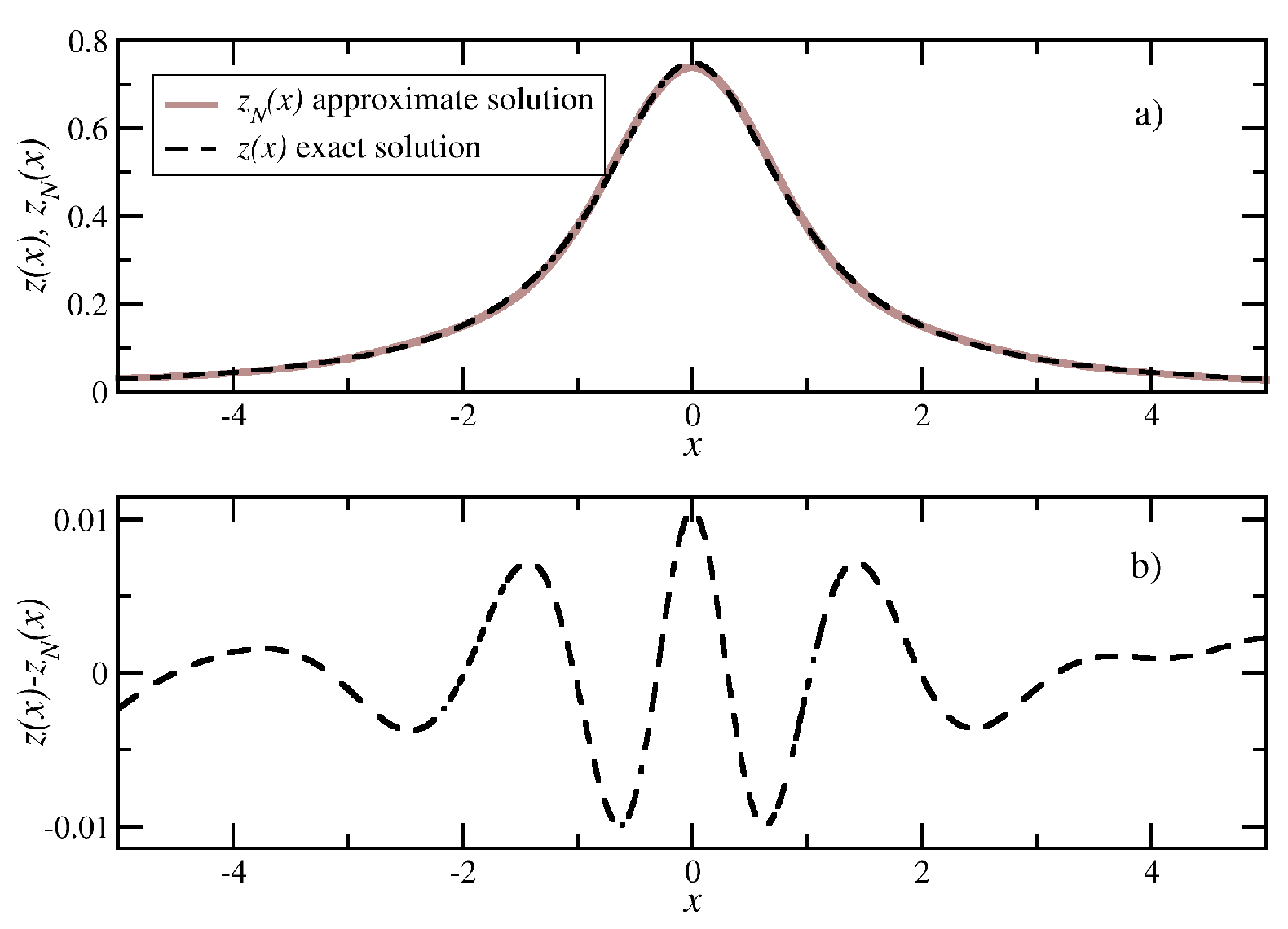
In
Figure 1, we show a numerical example of solving Equation (
49) using the NNH. In the works cited above, the NNH has been applied to nonlinear approximations of the original equation. Here, we demonstrate an application of the NNH to the original nonlinear equation with the logarithmic potential. Consider Equation (
49) with the following parameters:
. The exact solution reads
. Equation (
49) has been solved numerically by solving the Cauchy problem for the following system of nonlinear differential equations
where
and the initial state
. The system has been solved by Euler’s method with time step
. In
Figure 1a, we show the final state for N = 180 after 100 iterations together with the exact solution. The numerical and the exact solutions are indistinguishable in the scale of the figure. The corresponding numerical error is shown in
Figure 1b.
10. Implementation and Numerical Experiments
We noted above that the continuous operator method has been applied for solving inverse coefficients problems [
49], hypersingular integral equations [
38], and inverse problems in astrophysics [
50]. In each of these works, the obtained results were compared with the known ones.
The most significant advantages of the continuous method for solving nonlinear operator equations compared with iterative methods are as follows:
(1) Implementation of the basic method does not require Gateaux or Frechet derivatives of the operator to solve the equation; (2) Implementation of the modified method does not require invertibility of the Gateaux or Frechet derivatives of the operator to solve the equation; (3) The operator continuous method is based on Lyapunov’s stability theory for solving differential equations. The method is stable for coefficient perturbations in right-hand sides of equations.
In this section, the method’s efficiency is illustrated on the example of solving inverse problems for logarithmic potential. Hereby, we solve the exact equation without any simplifications. As far as the authors know, the inverse problem for logarithmic potential has not been previously solved in such a formulation.
Let us return to Equation (
49) and write it in a more convenient form:
where
is the function describing the surface of the body;
is the density of the body, and
H is the occurrence depth of the body.
Recall the issue. There is a gravitating body infinitely extended along the Y-axis and homogeneous along y. In this case, it can be treated as two-dimensional and we restrict ourselves to considering Thus, we consider a body lying in the region Let stand for perturbation of the Earth’s external field. It is required to restore the function given data about
Similar problems are of great practical importance.
It was mentioned above that there are extensive studies devoted to the study of equations of the form (
56). They considered either linearized equations or nonlinear approximations of Equation (
56).
Below we demonstrate Hopfield neural networks for solving the original Equation (
56).
Let , and Here, Introduce the nodes
We will seek an approximate solution in the form of a piecewise constant function
where
The coefficients
are determined from the system of nonlinear algebraic equations
The system of Equation (
57) is associated with the Cauchy problem
The coefficients
are selected so that the logarithmic norm of the Jacobian of the right side of the system (
58) is negative.
The system (
58) can be solved by any numerical method.
Application of the Euler method leads to the iterative scheme
. Here,
h is the step of the Euler method.
The algorithm described above was applied to solve the problem of restoring a gravitating body with the data:
The exact solution of the problem is
The function
has been computed by the quadrature rule
Detailed computational results are shown in
Table 2.
11. Conclusions
The paper is devoted to approximate methods for solving linear and nonlinear equations of mathematical physics. In doing so, we used a spline-collocation method based on a continuous method for solving nonlinear operator equations [
19]. It has been shown that a continuous method computational scheme for solving nonlinear operator equations can be implemented with Hopfield neural networks. The efficiency and flexibility of the approach has been shown by evaluating multiple integrals, and solving Fredholm integral equations and hypersingular integral equations. In addition to the listed examples, the method was efficiently applied to a direct and inverse electromagnetic wave scattering problem [
51], amplitude-phase problem [
52,
53], solving Ambartsumian’s systems of equations (astrophysics) [
50], solving inverse problems of gravity and magnetic prospecting [
47], and solving direct and inverse problems for parabolic and hyperbolic equations [
54].
The authors intend to continue the study of the applicability of the continuous method for solving nonlinear operator equations, Hopfield neural networks, to new classes of equations. First, we want to use it for solving inverse problems in optics. Two points should be taken into account. First, the authors started to study the amplitude-phase problem [
52,
53]. Second, a couple of works devoted to applications of neural networks for inverse problems of restoration have been published recently [
55,
56]. It is of interest to investigate the possible use of the continuous operator method application for these issues.
As noted above, the continuous method for solving nonlinear operator equations is based on Lyapunov’s stability theory. The authors have studied the stability of Hopfield neural networks [
22,
57] and considered some issues of stabilization for dynamic systems [
58,
59]. A new statement of the problem of stabilization for dynamical systems was given in [
60,
61]. The authors intend to use this formulation in coming works.





{kind=link}