
A Hybridized Mixed Approach for Efficient Stress Prediction in a Layerwise Plate Model


Abstract
1. Introduction
2. The Governing Equations of the SCLS1 Model
2.1. Notations and Model Description
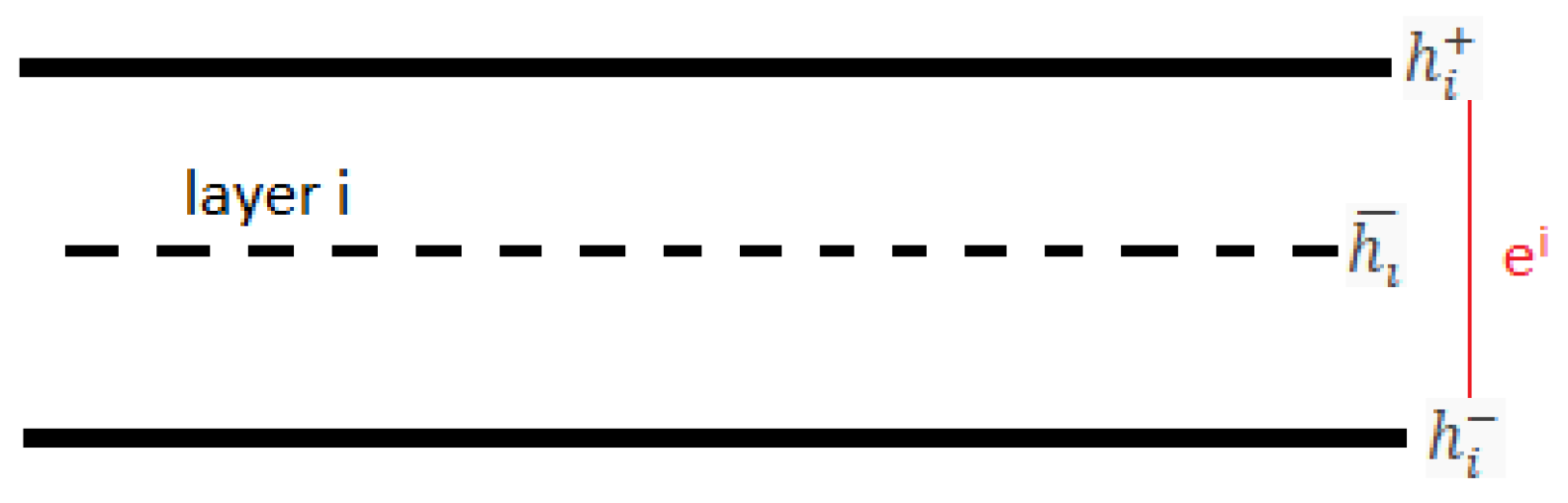
- The subscript indicate layer i, and the interface between layers with , respectively. By extension, the superscripts refer to the lower face and the upper face , respectively.
- In each layer are, respectively, the bottom, the top and the mid-plane z coordinate of the layer, and is the thickness. Thus, we have for all , and we set . See Figure 1.
- Greek subscripts indicate the in-plane components.
- Latin subscripts indicate the components.
- is the transpose of .
- is the fourth-order 3D compliance tensor of layer i with the minor and major symmetries: , and it is positive definite. Its inverse is the 3D elasticity stiffness tensor and is denoted by for layer i. The tensor possesses the same symmetries as , and it is also positive definite.
- is monoclinic in direction z:
- are the in-plane stress components, are the transverse shear stresses and is the normal stress.
- are the in-plane strain components, are the transverse strains and is the normal strain.
- are the in-plane 3D displacement components, and is the normal 3D displacement component.
2.2. The 3D Model Equations
2.3. The Static of the SCLS1 Model
- is in-plane stress resultants tensor, related to the local stress in each layer i by:where the integration through the thickness is noted
- is the moment resultants tensor expressed in terms of the stress field in each layer i as follows:
- is the out-of-plane shear stress resultant vector, defined from the stress field in each layer i as follows:
- is the interlaminar shear stress at the interface between layer j, and layer for given by:
- is the normal stress at the interface between j and , for , given by:
- is the divergence of the interlaminar shear stress vector defined on the interface between layer j and for .
2.4. The Equilibrium Equations
2.5. Generalized Displacements
2.6. Generalized Strains
2.7. The Constitutive Equations of the SCLS1 Model
- Membrane constitutive equation of layer i:
- Bending constitutive equations of layer i:
- Transverse shear constitutive equation of layer i:
- Shear constitutive equation of interface :
- Normal constitutive equation of interface :
- Constitutive equation for the generalized stress at interface :
2.8. Finite-Element Displacement-Based Implementation
3. Hybridized Mixed Methods for 3D Continua
3.1. Continuous Variational Formulation
3.2. Finite-Element Discretization
4. Hybridization of a Mixed Method for the SCLS1 Model
4.1. Continuous Formulation
4.2. Finite-Element Implementation
- discontinuous Lagrange interpolation of degree p for ;
- discontinuous Lagrange interpolation of degree for U;
- discontinuous Lagrange interpolation of degree p on edges for V;
5. Illustrative Applications
5.1. Homogeneous Laminate
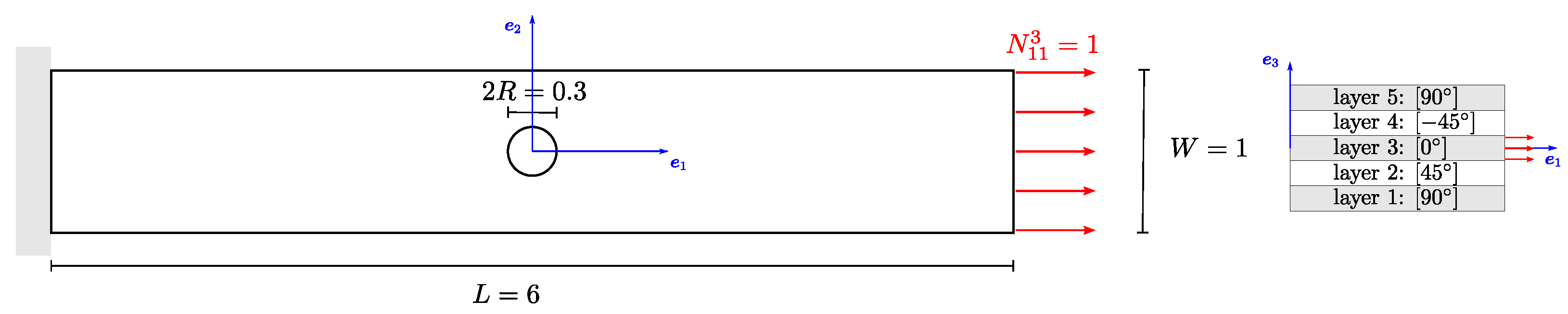
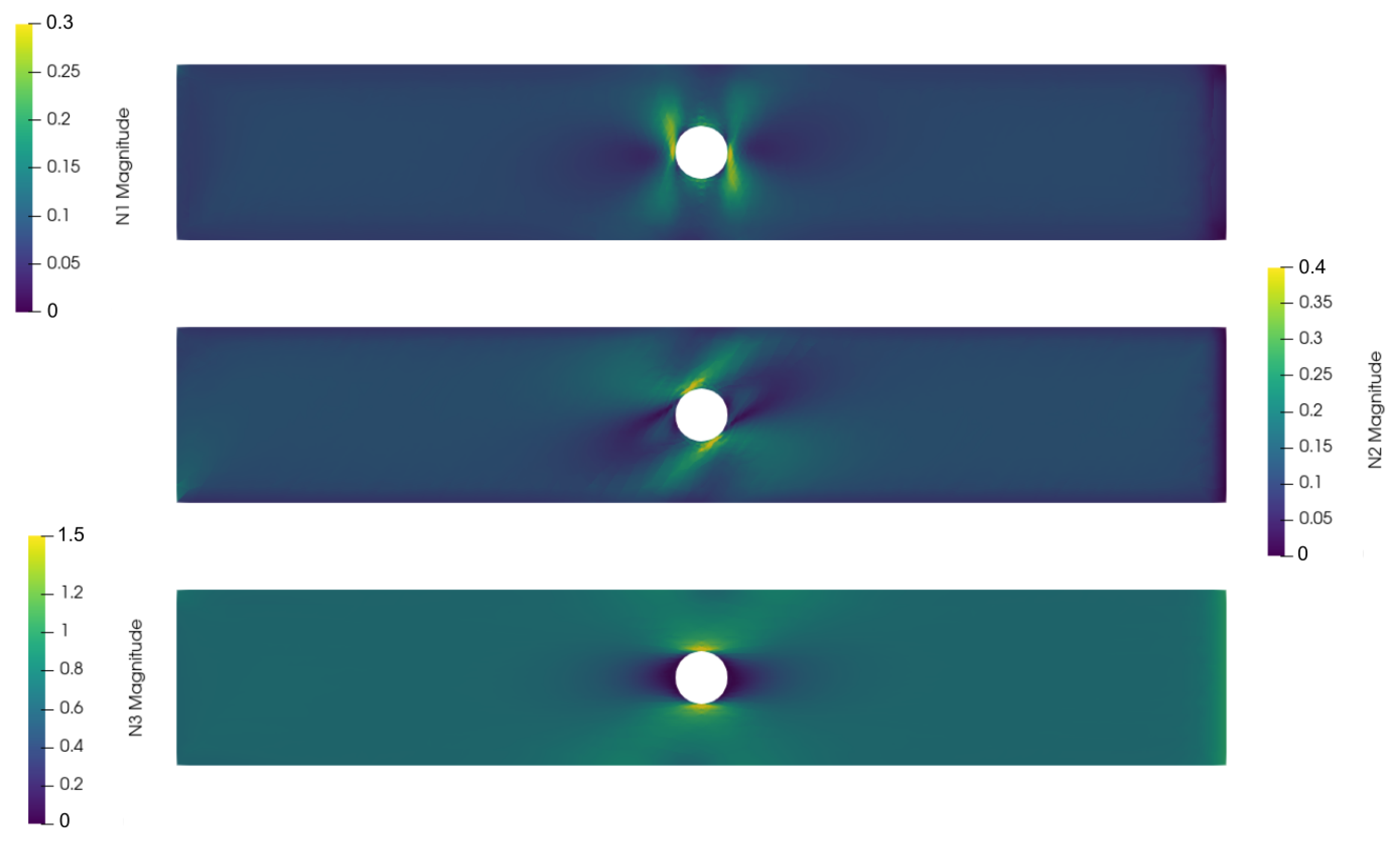
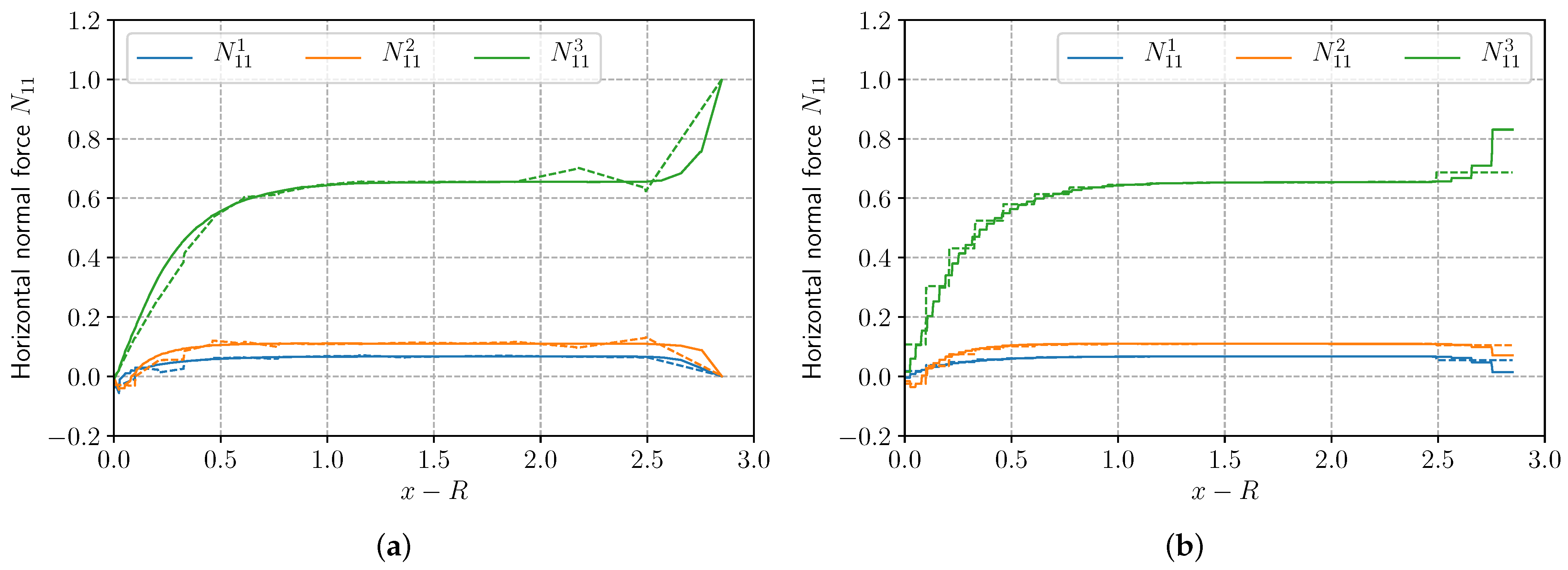
5.2. Laminate with a Circular Hole
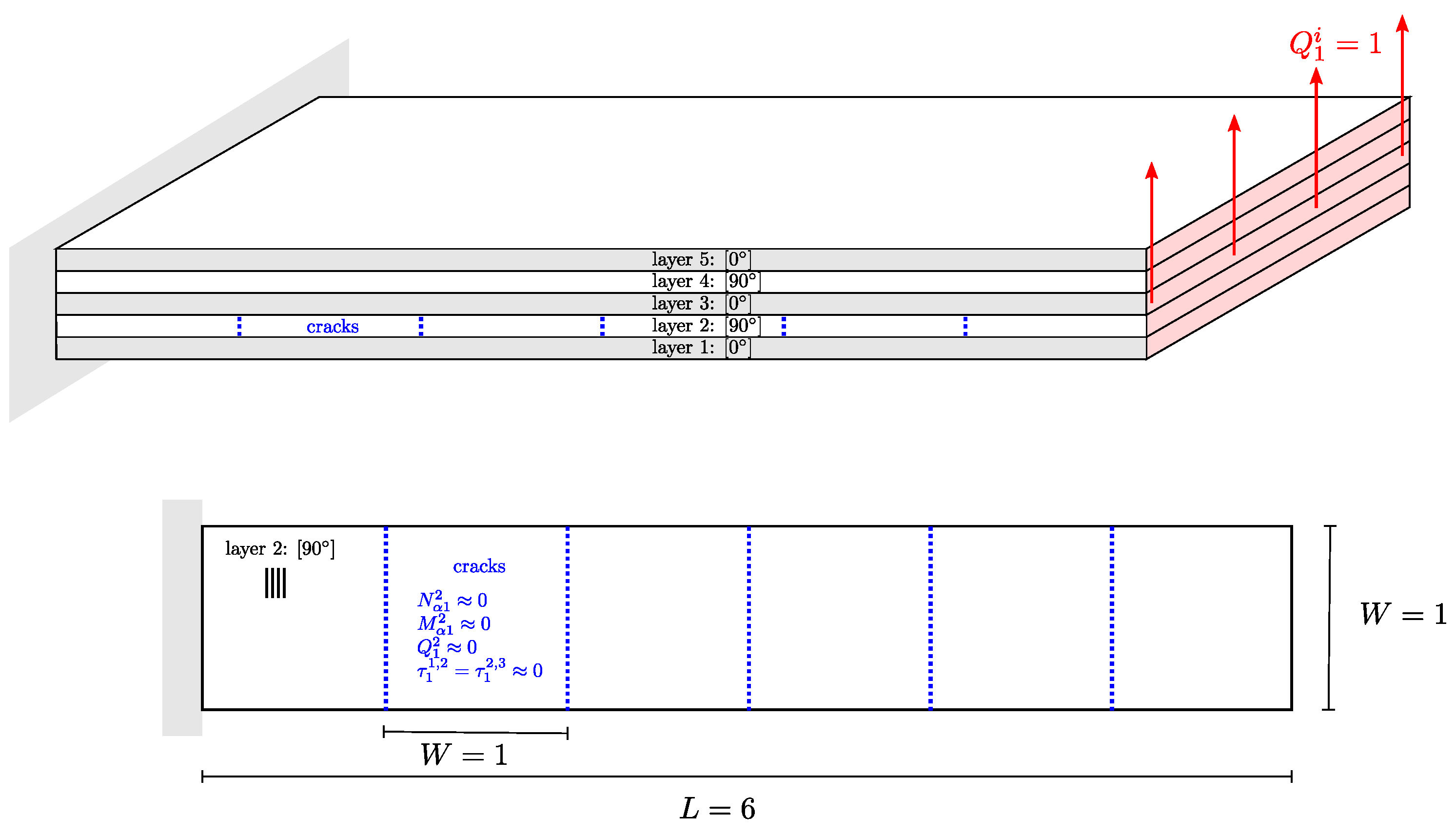
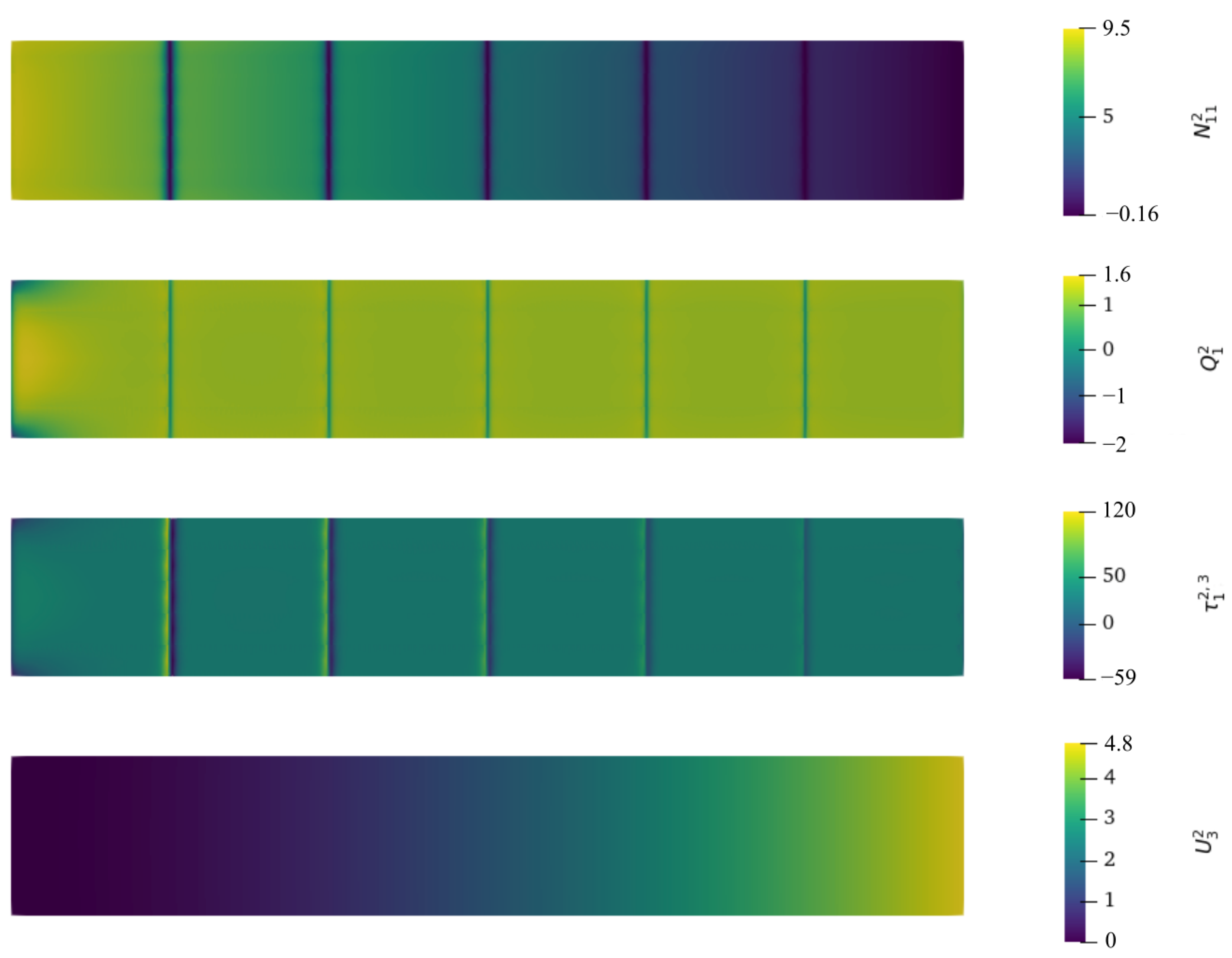
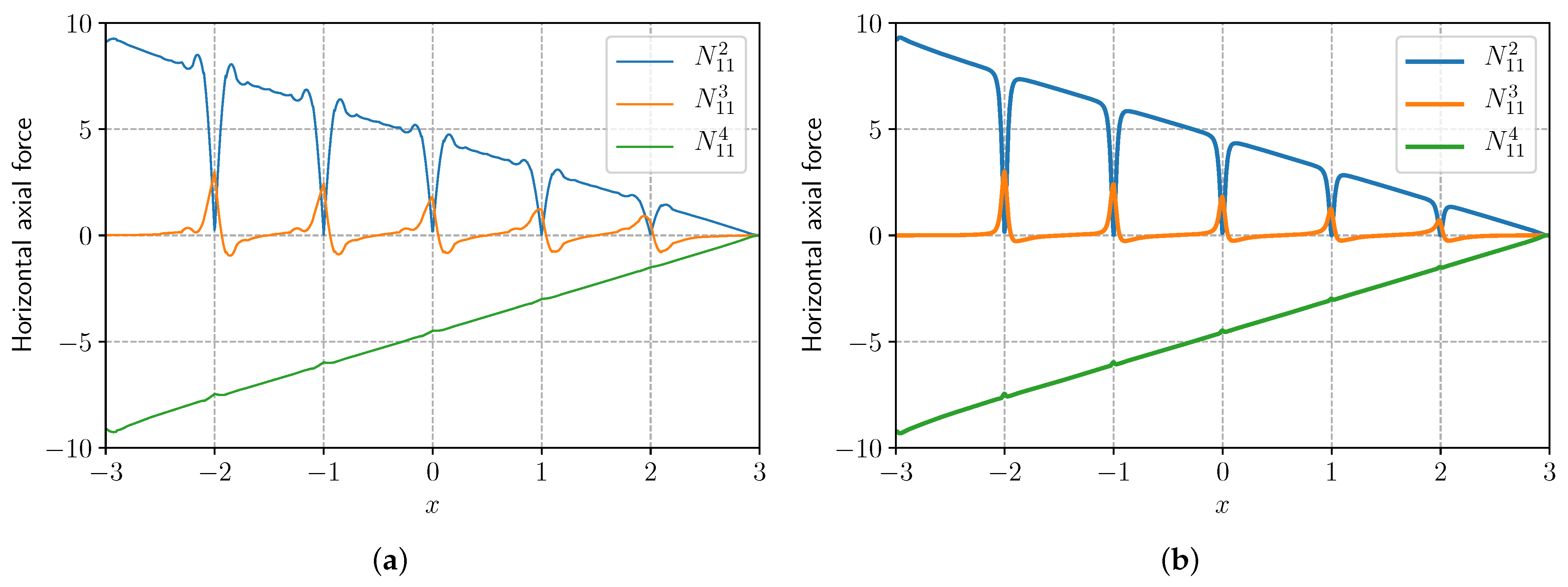
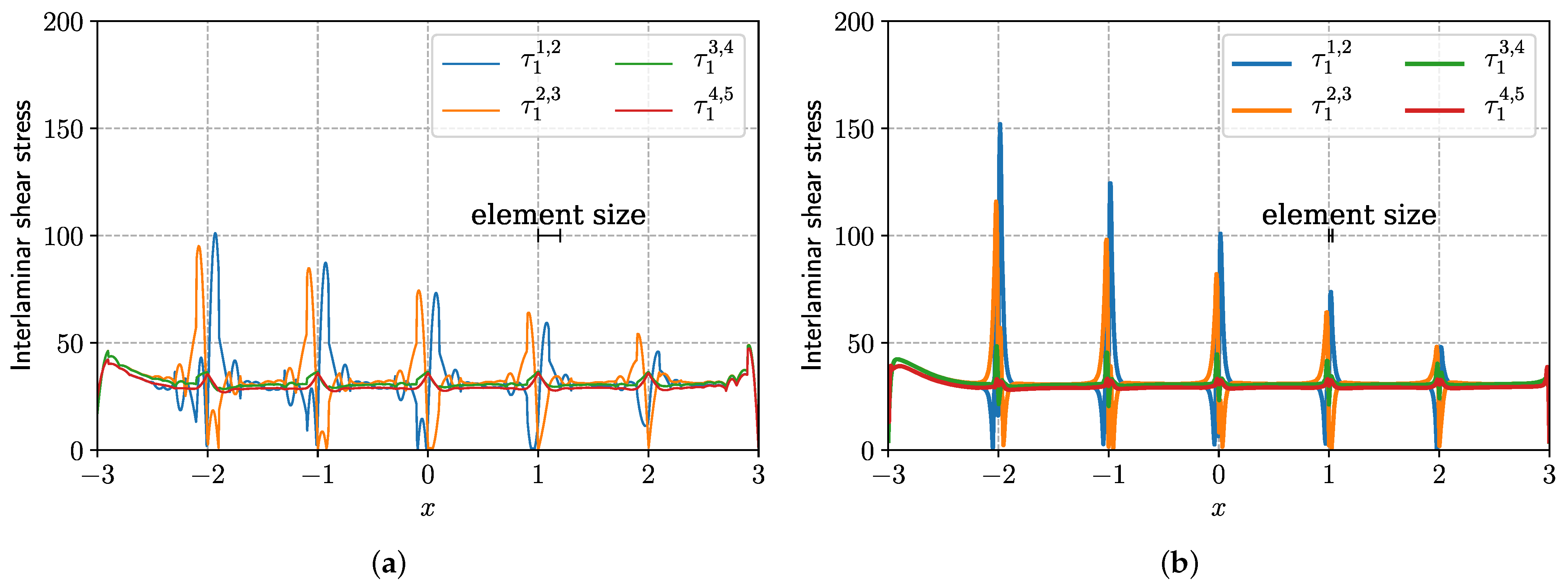
5.3. Bending of a Laminate with Multi-Cracking
6. Conclusions and Perspectives
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chue, C.H.; Liu, C.I. Disappearance of free-edge stress singularity in composite laminates. Compos. Struct. 2002, 56, 111–129. [Google Scholar] [CrossRef]
- Leguillon, D. A method based on singularity theory to predict edge delamination of laminates. Int. J. Fract. 1999, 100, 105–120. [Google Scholar] [CrossRef]
- Mittelsteda, C.; Becker, W. Asymptotic analysis of stress singularities in composite laminates by the boundary finite element method. Compos. Struct. 2005, 71, 210–219. [Google Scholar] [CrossRef]
- Ting, T.C.T.; Chou, S.C. Edge singularities in anisotropic composites. Int. J. Solids Struct. 1981, 17, 1057–1068. [Google Scholar] [CrossRef]
- Wang, S.S.; Choi, I. Boundary-layer effects in composite laminates Part II: Free-edge stress singularities. J. Appl. Mech. 1982, 49, 541–548. [Google Scholar] [CrossRef]
- Cecchi, A.; Sab, K. A homogenized model for orthotropic perdiodic plates: Application to brickwork panels. Int. J. Solids Struct. 2007, 44, 6055–6079. [Google Scholar] [CrossRef][Green Version]
- Maenghyo, C.; Parmerter, R.R. Efficient higher order composite plate theory for general lamination configurations. AIAA J. 1993, 31, 1299–1306. [Google Scholar]
- Lebée, A.; Sab, K. A Bending-Gradient model for thick plates. Part I: Theory. Int. J. Solids Struct. 2011, 48, 2878–2888. [Google Scholar] [CrossRef]
- Lebée, A.; Sab, K. A Bending-Gradient model for thick plates. Part II: Closed form solutions for cylindrical bending of laminates. Int. J. Solids Struct. 2011, 48, 2889–2901. [Google Scholar] [CrossRef]
- Lebée, A.; Sab, K. Homogenization of thick periodic plates: Application of the bending-gradient plate theory to a folded core sandwich panel. Int. J. Solids Struct. 2012, 49, 2778–2792. [Google Scholar] [CrossRef]
- Reddy, J.N. A simple higher-order theory for laminated composite plates. J. Appl. Mech. 1984, 51, 745–752. [Google Scholar] [CrossRef]
- Swaminathan, K.; Ragounadin, D. Analytical solutions using a higher-order refined theory for the static analysis of antisymmetric angle-ply composite and sandwich plates. Compos. Struct. 2004, 64, 405–417. [Google Scholar] [CrossRef]
- Whitney, J.M.; Sun, C.T. A higher-order theory for extensional motion of laminates composites. J. Sound Vib. 1973, 30, 85–97. [Google Scholar] [CrossRef]
- Vidal, P.; Polit, O. A family of sinus finite elements for the analysis of rectangular laminated beams. Compos. Struct. 2008, 84, 56–72. [Google Scholar] [CrossRef]
- Vidal, P.; Polit, O. A sine finite element using a zig-zag function for the analysis of laminated composite beams. Compos. Part B Eng. 2011, 42, 1671–1682. [Google Scholar] [CrossRef]
- Barbero, E.J.; Reddy, J.N. Modeling of delamination in composite laminates using a layerwise plate theory. Int. J. Solids Struct. 1991, 28, 373–388. [Google Scholar] [CrossRef]
- Botello, S.; Oñate, E.; Canet, J.M. A layer-wise triangle for analysis of laminated composite plates and shells. Comput. Struct. 1999, 70, 635–646. [Google Scholar] [CrossRef]
- Carrera, E. Mixed layer-wise models for multilayered plates analysis. Compos. Struct. 1998, 43, 57–70. [Google Scholar] [CrossRef]
- Moorthy, C.M.D.; Reddy, J.N. Modeling of delamination using a layerwise element with enhanced strains. In Studies in Applied Mechanics; Elsevier: Amsterdam, The Netherlands, 1998; Volume 46, pp. 459–479. [Google Scholar]
- Gaudenzi, P.; Barboni, R.; Mannini, A. A finite element evaluation of single-layer and multi-layer theories for the analysis of laminated plates. Comput. Struct. 1995, 30, 427–440. [Google Scholar] [CrossRef]
- Robbins, D.H.; Reddy, J.N. Modeling of thick composites using a layerwise laminate theory. Int. J. Numer. Methods Eng. 1993, 36, 655–677. [Google Scholar] [CrossRef]
- Carrera, E. Theories and finite elements for multilayered, anisotropic composite plates and shells. Arch. Comput. Methods Eng. 2002, 9, 87–140. [Google Scholar] [CrossRef]
- Carrera, E. On the use of the Murakami’s zig-zag function in the modeling of layered plates and shells. Comput. Struct. 2004, 82, 541–554. [Google Scholar] [CrossRef]
- Zhang, Y.X.; Yang, C.H. Recent developments in finite element analysis for laminated composite plates. Compos. Struct. 2009, 88, 147–157. [Google Scholar] [CrossRef]
- Caron, J.F.; Diaz, A.D.; Carreria, R.P.; Chabot, A.; Ehrlacher, A. Multi-particle modelling for the prediction of delamination in multi-layered materials. Compos. Sci. Technol. 2006, 66, 755–765. [Google Scholar] [CrossRef]
- Carreria, R.P.; Caron, J.F.; Diaz, A.D. Model of multilayered materials for interface stresses estimation and validation by finite element calculations. Mech. Mater. 2002, 34, 217–230. [Google Scholar] [CrossRef]
- Diaz, A.D.; Caron, J.F.; Carreira, R.P. Software application for evaluating interfacial stresses in inelastic symmetrical laminates with free edges. Compos. Struct. 2002, 58, 195–208. [Google Scholar] [CrossRef]
- Lerpiniere, A.; Caron, J.F.; Diaz, A.D.; Sab, K. The LS1 model for delamination propagation in multilayered materials at 00/θ0 interfaces: A comparison between experimental and finite elements strain energy release rates. Int. J. Solids Struct. 2014, 51, 3973–3986. [Google Scholar] [CrossRef]
- Naciri, T.; Ehrlacher, A.; Chabot, A. Interlaminar stress analysis with a new multiparticle modelization of multilayered materials (M4). Compos. Sci. Technol. 1998, 58, 337–343. [Google Scholar] [CrossRef]
- Nguyen, V.T.; Caron, J.F. A new finite element for free edges effect analysis in laminated composites. Compos. Struct. 2006, 84, 1538–1546. [Google Scholar] [CrossRef]
- Saeedi, N.; Sab, K.; Caron, J.F. Delaminated multilayered plates under uniaxial extension. Part I: Analytical analysis using a layerwise stress approach. Int. J. Solids Struct. 2012, 49, 3711–3726. [Google Scholar] [CrossRef]
- Saeedi, N.; Sab, K.; Caron, J.F. Delaminated multilayered plates under uniaxial extension. Part II: Very efficient layerwise mesh strategy for the prediction of delamination onset. Int. J. Solids Struct. 2012, 49, 3727–3740. [Google Scholar] [CrossRef]
- Saeedi, N.; Sab, K.; Caron, J.F. Cylindrical bending of multilayered plates with multi-delamination via a layerwise stress approach. Compos. Struct. 2013, 95, 728–739. [Google Scholar] [CrossRef]
- Saeedi, N.; Sab, K.; Caron, J.F. Stress analysis of long multilayered plates subjected to invariant loading: Analytical solutions by a layerwise stress model. Compos. Struct. 2013, 100, 307–322. [Google Scholar] [CrossRef]
- Pagano, N.; Pipes, R. Interlaminar stresses in composite laminates under uniform axial extension. J. Composite Mat. 1970, 4, 538–548. [Google Scholar]
- Baroud, R.; Sab, K.; Caron, J.F.; Kaddah, F. A statically compatible layerwise stress model for the analysis of multilayered plates. Int. J. Solids Struct. 2016, 96, 11–24. [Google Scholar] [CrossRef]
- Nasser, H.; Chupin, O.; Piau, J.M.; Chabot, A. Mixed FEM for solving a plate type model intended for analysis of pavements with discontinuities. Road Mater. Pavement Des. 2018, 19, 496–510. [Google Scholar] [CrossRef]
- Salha, L.; Bleyer, J.; Sab, K.; Bodgi, J. Mesh-adapted stress analysis of multilayered plates using a layerwise model. Adv. Modeling Simul. Eng. Sci. 2020, 7, 2. [Google Scholar] [CrossRef]
- Logg, A.; Mardal, K.A.; Wells, G.N. Automated Solution of Differential Equations by the Finite Element Method; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Alnæs, M.; Blechta, J.; Hake, J.; Johansson, A.; Kehlet, B.; Logg, A.; Richardson, C.; Ring, J.; Rognes, M.E.; Wells, G.N. The FEniCS project version 1.5. Arch. Numer. Softw. 2015, 3, 9–23. [Google Scholar]
- Fraeijs de Veubeke, B. Displacement and equilibrium models in the finite element method. In Stress Analysis; John Wiley & Sons: Hoboken, NJ, USA, 1965; Chapter 9. [Google Scholar]
- Arnold, D.N.; Brezzi, F. Mixed and nonconforming finite element methods: Implementation, postprocessing and error estimates. ESAIM Math. Model. Numer. Anal. 1985, 19, 7–32. [Google Scholar] [CrossRef]
- Cockburn, B.; Gopalakrishnan, J.; Lazarov, R. Unified hybridization of discontinuous Galerkin, mixed, and continuous Galerkin methods for second order elliptic problems. SIAM J. Numer. Anal. 2009, 47, 1319–1365. [Google Scholar] [CrossRef]
- Brezzi, F.; Fortin, M. Mixed and Hybrid Finite Element Methods; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012; Volume 15. [Google Scholar]
- Arnold, D.N.; Winther, R. Mixed finite elements for elasticity. Numer. Math. 2002, 92, 401–419. [Google Scholar] [CrossRef]
- Arnold, D.; Falk, R.; Winther, R. Mixed finite element methods for linear elasticity with weakly imposed symmetry. Math. Comput. 2007, 76, 1699–1723. [Google Scholar] [CrossRef]
- Gong, S.; Wu, S.; Xu, J. New hybridized mixed methods for linear elasticity and optimal multilevel solvers. Numer. Math. 2019, 141, 569–604. [Google Scholar] [CrossRef]
- Gibson, T.H.; Mitchell, L.; Ham, D.A.; Cotter, C.J. Slate: Extending Firedrake’s domain-specific abstraction to hybridized solvers for geoscience and beyond. Geosci. Model Dev. 2020, 13, 735–761. [Google Scholar] [CrossRef]
- Rathgeber, F.; Ham, D.A.; Mitchell, L.; Lange, M.; Luporini, F.; McRae, A.T.; Bercea, G.T.; Markall, G.R.; Kelly, P.H. Firedrake: Automating the finite element method by composing abstractions. ACM Trans. Math. Softw. 2016, 43, 1–27. [Google Scholar] [CrossRef]
- Klöckner, A. Loo.py: Transformation-based code generation for GPUs and CPUs. In Proceedings of the ACM SIGPLAN Workshop on Libraries, Languages, and Compilers for Array Programming, Edinburgh, Scotland, 9–11 June 2014. [Google Scholar]
- Kirby, R.C.; Mitchell, L. Solver composition across the PDE/linear algebra barrier. SIAM J. Sci. Comput. 2018, 40, C76–C98. [Google Scholar] [CrossRef]
- Sun, T.; Mitchell, L.; Kulkarni, K.; Klöckner, A.; Ham, D.A.; Kelly, P.H. A study of vectorization for matrix-free finite element methods. arXiv 2019, arXiv:1903.08243. [Google Scholar] [CrossRef]
- Vidal, P.; Gallimard, L.; Polit, O. Proper generalized decomposition and layer-wise approach for the modeling of composite plate structures. Int. J. Solids Struct. 2013, 50, 2239–2250. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Discretization | U | V | Total | Condensed | |
|---|---|---|---|---|---|
| Mixed () | |||||
| Mixed () | |||||
| Displacement | – | – | – | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Salha, L.; Bleyer, J.; Sab, K.; Bodgi, J. A Hybridized Mixed Approach for Efficient Stress Prediction in a Layerwise Plate Model. Mathematics 2022, 10, 1711. https://doi.org/10.3390/math10101711
Salha L, Bleyer J, Sab K, Bodgi J. A Hybridized Mixed Approach for Efficient Stress Prediction in a Layerwise Plate Model. Mathematics. 2022; 10(10):1711. https://doi.org/10.3390/math10101711
Chicago/Turabian StyleSalha, Lucille, Jeremy Bleyer, Karam Sab, and Joanna Bodgi. 2022. "A Hybridized Mixed Approach for Efficient Stress Prediction in a Layerwise Plate Model" Mathematics 10, no. 10: 1711. https://doi.org/10.3390/math10101711
APA StyleSalha, L., Bleyer, J., Sab, K., & Bodgi, J. (2022). A Hybridized Mixed Approach for Efficient Stress Prediction in a Layerwise Plate Model. Mathematics, 10(10), 1711. https://doi.org/10.3390/math10101711