1. Introduction
Computational thinking (CT) is a crucial component of modern educational curricula worldwide and a significant topic for instructors and educators in computer science courses [
1]. As Wing [
2] notes, CT provides a conceptual framework for individuals to understand how to use algorithms and convert them into programming languages to solve real-world problems. According to recent literature reviews [
3,
4,
5], young students need to develop cognitive and mental thinking skills related to CT, such as abstraction, procedural thinking, modeling, logical reasoning, and parallelism, to decompose problems into sub-parts and propose possible solutions through coding. Several researchers have emphasized the importance of teaching CT, as it equips students with the necessary skills for cognitive thinking, problem-solving [
6], creative thinking [
7], and digital competencies [
8].
Teaching CT and programming skills development in computer science courses is closely associated with educational robotics, which involves practical tasks that educators and instructors should be trained to transfer to younger students [
9]. Educational robotics is a new field of science that combines elements of software development, artificial intelligence, engineering, and human–computer interaction. It enables users to understand and classify physical objects through haptic exploration, considering energy supply units, logic circuits, sensors, and data storage units in different instructional settings. CT is also inseparable from educational robotics, as it utilizes technology and mathematics to the fullest extent [
10,
11]. Research has shown that the integration of educational robots for project-based learning improves students’ learning outcomes. Several studies [
6,
12,
13,
14] have examined the influence of educational robotics on students’ learning outcomes, revealing positive effects on engagement and academic achievement. Overall, educational robot-supported projects can provide an effective way to engage students in several learning tasks, improve their problem-solving skills, social skills, creativity, and motivation in CT skills and programming development [
15,
16].
To date, many research efforts have paid attention to the generic influence of educational robotics on students’ learning outcomes, while others have compared the effects of instructional approaches and platforms such as Scratch and LEGO
® WeDo. Beyond the impact of Scratch and LEGO
® WeDo as tools for promoting students’ learning outcomes in programming and robotics [
17,
18], some significant differences have been mainly reported due to their technical characteristics, project instructional design, and students’ prior knowledge [
19]. Despite broad consensus on the importance and the increasing number of digital and physical computing devices, there is no dedicated measurement of their effects on undergraduate students’ performance in CT and programming skills development in association with their psychological constructs and their ability to design, develop, and program more advanced projects related to IoT (Internet of Things) prototypes. There are widespread concerns over the lack of students’ CT and programming skills development for solving real-world problems when it comes to the impact of different computing devices, considering their absorption and need for cognition in programming courses [
20,
21]. The majority of digital and physical devices can support students with different backgrounds in programming, i.e., those who may inhibit learning persistence and those who interfere with the retrieval and application of their available knowledge structures to track their physical manipulations to provide realistic touch interaction with objects or digital sensations in coordination with computing devices [
22,
23]. In their literature review, Ioannou and Makridou [
24] also mentioned that various platforms are commercially available with various capabilities and costs, whereas there has not yet been any research conducted to identify possible benefits and drawbacks. Thus, several misunderstandings on their effects and limits concerning students’ CT skills can still exist. In addition, most of the previous studies have examined social and cognitive skills [
6,
7], while others were focused on emotions in different robotics programming platforms, which is limited as most of the studies in the field have mostly been conducted in primary education settings [
3]. With this in mind, even though Scratch and LEGO
® WeDo have been widely shown to be effective tools for promoting students’ learning outcomes in CT and programming skills development, further study is necessary to explore the differences in the learning outputs and the influence of psychological factors.
Based on the above, two research questions can be formulated as follows:
RQ1. Do students who used exclusively robot-supported instruction (LEGO® WeDo) improve their learning outcomes related to CT and programming skills development more than those who utilized Scratch for IoT practice-based concepts?
RQ2. Do students who used exclusively robot-supported instruction (LEGO® WeDo) exhibit lower absorption and higher cognitive levels in practice-based tasks than their counterparts who utilized Scratch?
This study explores any possible relationships between the learning outcomes of students who exclusively used robot-supported instruction (LEGO® WeDo robotics kit and its software) and others who differentiated their robot-supported instruction (LEGO® WeDo robotics kit) to learn how to code via Scratch. Therefore, this study investigates any added value of both instructional contexts, focusing on CT and programming skills development in association with their need for cognition (mental load and mental effort) and absorption (happiness, anger, anxiety, sadness).
The main contribution of this study is to extend our knowledge base on the effect of educational robotics on students’ learning outcomes through practice-based investigation of any possible associations between psychological factors, such as absorption and need for cognition. The findings may support teachers and instructional designers in applying efficient and effective project-based tasks using Scratch and/or LEGO® WeDo in higher education.
3. Research Method
3.1. Participants
In the present study, the sample consisted of fifty-seven participants (
n = 57) enrolled during the winter semester of 2022–2023. A quasi-experimental design was followed, according to the guidelines of Cohen et al [
36], with thirty-seven students participating in the experimental group (EG;
n = 37) and another twenty in the control group (CG;
n = 20). The former completed all learning tasks exclusively using LEGO
® WeDo software (ver. 1.9.385), whereas the latter used the visual programming environment of Scratch to learn how to demonstrate and code educational robots for IoT projects. The majority of the students were males (51.43%), and the mean age of participants was 19.8 (
SD = 2.3) years old.
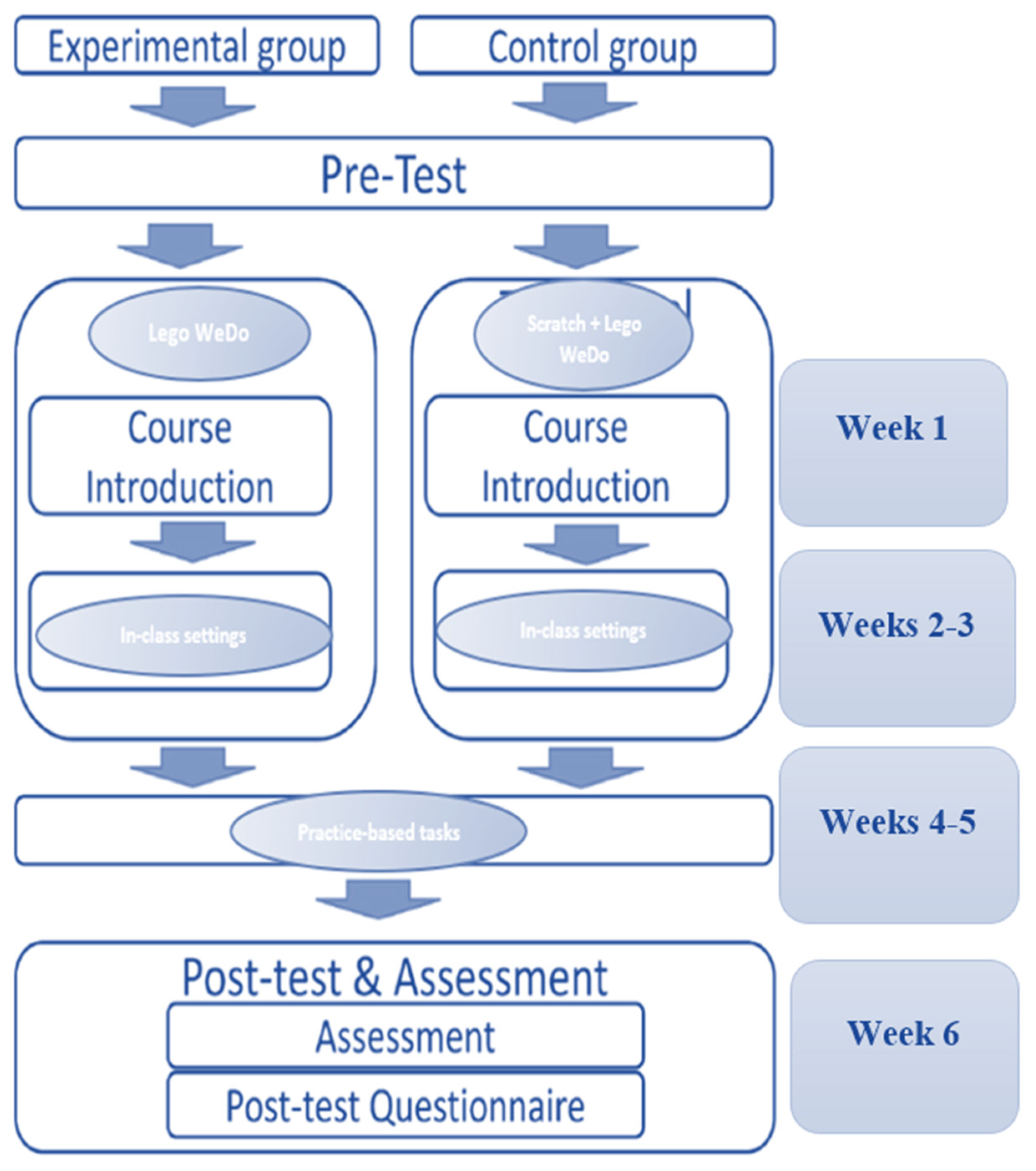
As a point of reference (control condition), we considered the intervention using Scratch, as students are more acquainted with this instructional method. In the other approach (experimental condition), the intervention involved the adoption of a LEGO® software. Nonetheless, all learning tasks for both groups were completed by each participant’s project. After the course ended, we measured as dependent variables the students’ learning outcomes concerning CT skills and programming development, as well as their possible association with psychological measures, such as absorption, and need for cognition. During the last week of the proposed teaching intervention—from the overall 6 weeks—all-inclusive post-tests were distributed to the participants, along with the psychometric survey to measure their views and perceptions.
All participants chose independently an instructional approach toward their interest to be involved in an undergraduate course entitled “Educational Robotics”.
Table 1 depicts the sample demographics. All participants had at least an intermediate level in programming, and most were advanced or proficient. Nevertheless, familiarity with programming environments was lower in EG (LEGO
® WeDo) than was familiarity with Scratch in the CG, reflecting the fact that participants in the former had less experience with robots in formal settings. Hence, there was not any possibility to create equality between groups in familiarity, but both groups had the same or similar interest in programming experience levels because all were at least slightly interested.
3.2. Experimental Design
Participants in the study went through two stages of teaching on the use of Scratch and LEGO® WeDo. In the introduction stage, PowerPoint slides were used to present the main objective of the teaching intervention, which was to teach participants the operation methods of robots’ movements and the principles of various embedded electronic circuit components. These concepts were essential for designing and programming physical robots to perform spatial movements associated with their assistive support in different aspects of human life. The participants in the study had access to digital materials on embedded electronic circuit topics such as embedded development boards, sensors, microcontrollers, wires, and gears, which were available on the main website of Scratch.
The EG was able to participate in two different courses, each providing a learning progress scenario with specific objectives to achieve and a means to measure progress. In the first section, the main instructor presented information regarding embedded electronic circuits, microcontrollers, and sensors, including the connection of general-purpose input/output pins and the operation of all components using the LEGO® WeDo programming environment. In the second section, participants implemented their design and development projects, applying the knowledge gained in various applications, including the programming phase.
Before programming their projects, students completed specific tasks in each section. The main instructor provided feedback on all students’ ideas, and all tasks were completed within the university campus. If any participant failed to follow instructions or complete a task, the instructor provided further guidance to proceed with the next task.
The CG utilized Scratch’s digital content and programming constructs provided by the colored code blocks to learn how to code their physical robots. All participants were taught the same learning material. The EG completed practice-based tasks on embedded electronic circuits and sensor connections using LEGO
® WeDo and programming pseudocode with the main software (
Figure 1).
The researchers discussed with all participants and announced to them that all collected data were anonymized and the proposed teaching intervention would have no impact on their grades in the main course. Participants had the chance to withdraw from the experiment at any time. This experimental process started with a pre-test, and its parts included demographic questions and measurements from students’ prior knowledge of programming. After 50 min to collect the appropriate data, all participants were randomly assigned to one of two groups, EG or CG. Based on their choice, specific courses were made by the main instructor with LEGO® components and Scratch for the EG and CG, respectively. Any issue regarding learning tasks and/or other equipment problems during the learning process was resolved in the class. If any problem was solved, all participants from both groups were asked to complete post-tests for assessing students’ performance as well as their association with CT skills and programming development regarding absorption and need for cognition. Once both groups had completed the course, participants were asked to complete practice-based tasks related to IoT projects using LEGO® WeDo robots.
3.3. Procedure
To operationalize the proposed instructional approach for this teaching intervention, five sessions in
Table 2 provide five core dimensions of the broader CT conceptual framework that Atmatzidou and Dimitriades [
16] proposed. All learning tasks were associated with a framework of concepts and skills related to CT, using educational robots that can provide insights for instructors or educators who want to present an alignment of instructional design within formal instructional contexts. To foster students’ problem-solving strategies and CT skills development, all tasks took place inside the university campus.
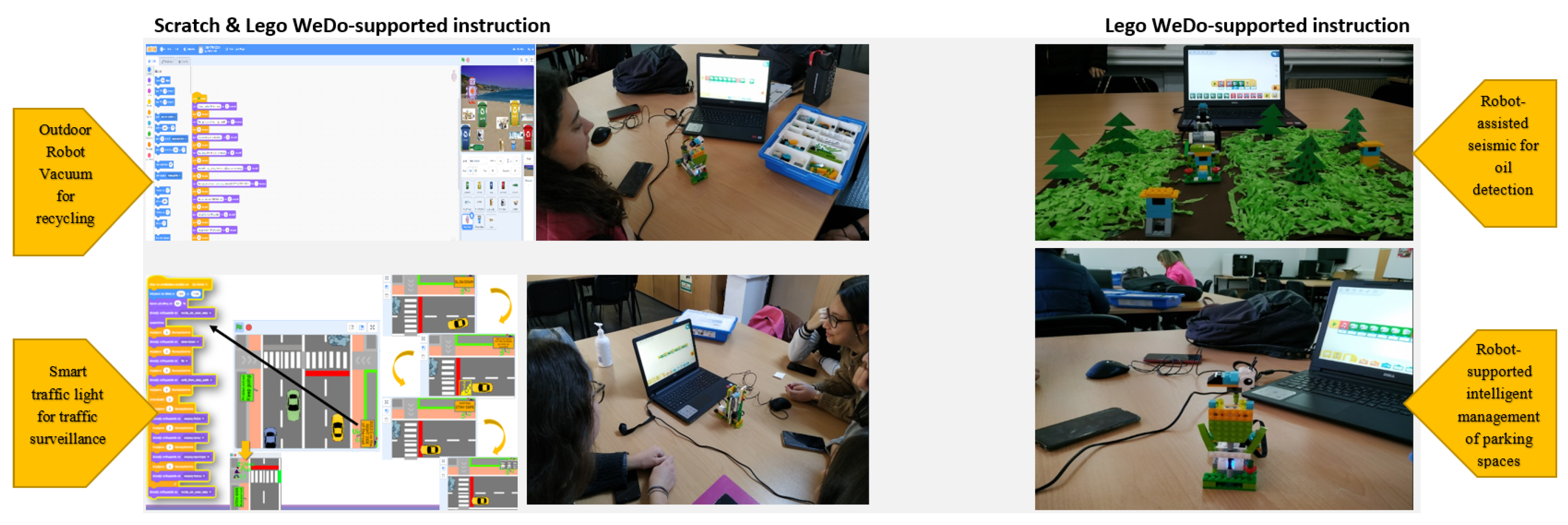
The proposed project aims to assist students in learning how to apply and generate new knowledge by acknowledging actionable methodological advances regarding workflow design for autonomous robots, smart operator support, workflow-oriented predictive maintenance, and the use of digital twins in the user interface design of educational robotic systems. Depending on their group, the students’ primary goal was to share, learn, and disseminate to younger ones in primary school settings how to design, develop, and program their autonomous IoT robotic prototypes. Methodologically, each student explored how to use data-enabled design methods to understand and evaluate the context, the roles, and the workflows of educational autonomous robots (
Figure 2).
Table 2 presents the design of tasks from this teaching intervention with the proposed course plans consisting of the learning tasks associated with the operational definition of CT as a problem-solving process with specific learning objectives [
1] combined with the skills related to CT skills [
15]. As
Table 2 below indicates, during the first phase someone will be carrying out contextual research using in-depth functional data collection and qualitative methods. In the second phase, any participant should establish a data-supported design. In the third phase, participants will be leading the evaluation.
Upon completion of the intervention, an additional set of hardcopies was delivered to students, with the class teachers requesting them to describe any situation that could take place in the real world. The completed documents were later used for the assessment of the acquired knowledge and skills (i.e., the effectiveness of this approach on vocabulary learning and sentence structuring) that students demonstrated at the end of the intervention. For the evaluation process, specific model answers were prepared in order to judge the correctness of the Greek grammar rules and the spelling of each word used by participants to describe their own stories before and after the treatment. Both the pre-and the post-assessments were examined as open-ended stories in line with the participants’ cognitive level and capacity. The experimental process is described in detail in
Table 2.
In the planning phase, the main researcher and the second instructor of the “Educational Robots” course were involved in authentic and realistic laboratory tasks. Ethical review and approval were waived for this study as no personal data were collected, in accordance with federal data protection laws. Participation was voluntary, and all participants provided informed consent before data collection. Before conducting the teaching intervention, all students from both groups received detailed information regarding the study’s purpose. Additionally, they were required to sign an informed consent form that included information regarding (a) known possible side-effects that might occur while using the educational robots, (b) the collection and use of their data in accordance with the General Data Protection Regulation (GDPR) guidelines, and (c) their right to withdraw from the study at any time without penalty.
3.4. Instrumentation
Following Castro et al.’s [
26] guidelines, there are no suitable assessment tools to measure the impact of educational robotics and, therefore, a combination of questionnaires was utilized to assess student’s knowledge and learning outcomes. Before conducting the teaching intervention, an online questionnaire was shared, in which participants were asked to provide their gender, age, and learning experience. A pre-test was delivered to all participants from both groups to measure their science and programming knowledge, and their components or embedded circuits regarding robots consisted of 10 questions (for example, “What are the limitations of the programming language for robots’ movements?” or “How do you properly connect an LED to the LEGO
® robot interface?”).
To determine the rigor of the selected questions, two experts were invited to strengthen the reliability and validity of this study’s findings. The gathered data were also cross-checked by two researchers, as Campbell and Stanley [
37] recommended. Indeed, all the data were coded, while a randomly selected sample of 25% of the responses was coded to examine: (a) Pearson’s r for inter-rater reliability to measure the correlation between the scores from the two rates, and (b) Cohen’s Kappa (k) to identify any optional agreement from error coding. For the CG, the pre-test has r = 0.81 (
p < 0.001) on scores and k = 0.87 (
p < 0.001). The post-test has r = 0.82 (
p < 0.001) in scores and k = 0.81 (
p < 0.001). For the EG, the pre-test has r = 0.88 (
p < 0.001) in scores and k = 0.81 (
p < 0.001). The post-test has r = 0.87 (
p < 0.001) in scores and k = 0.89 (
p < 0.001).Therefore, high inter-rater reliability and high inter-rater agreement for the coding are provided.
3.4.1. CT Skills
To assess CT skills and programming development, a valid and reliable tool was utilized by Kılıç et al. [
38]. The CT scale has a 5-point Likert scale ranging from 1 (strongly disagree) to 5 (strongly agree). It consists of a 33-item scale reflecting the investigation of (a) 12 items for Conceptual knowledge (i.e., measures of basic issues related to syntactic, semantic, and schematic knowledge regarding programming constructs and concepts), (b) 7 items for Algorithmic thinking (i.e., measures of step-by-step design skills that occur during the application of programming concepts in a certain order to perform as solution plans), and (c) 14 items for Evaluation (i.e., measures of a process to evaluate the effectiveness and efficiency of algorithms and functionality of programs made to ensure their best performance for solving problems in practice-based tasks). All subscales were translated into Greek. The reliability of the translated version was analyzed with Cronbach’s alpha coefficients (0.817 > 0.8 and 0.822 > 0.8 for the CG and EG, respectively), which demonstrate coefficients with good to excellent internal consistencies, as Campbell and Stanley [
37] suggested.
3.4.2. Absorption
In the present study, the Modified Tellegen Absorption Scale [
39] was used. It is a 34-item (true–false) modified scale of the original TAS and was developed as a personality trait to measure someone’s propensity for attention and emotional states, rating the frequency of different experiences [
29]. Some indicative questions are as follows: “I can ramble off into my thoughts, while doing a routine task and forget that I am doing the task, and then find a few minutes later that I have completed it” and “The simulation and robot components stimulate my imagination for innovation”. We have also followed the total number of items indicating Tellegen’s and Atkinson’s procedure [
29] in favor of generating a score for each participant (M = 29.47, SD = 7.62, Cronbach’s α = 0.91).
3.5. Need for Cognition
Respondents’ relative need for cognition was measured through Lins de Holanda Coelho et al.’s questionnaire [
40], consisting of the Need for Cognition Scale (NCS-6). The scale includes 6 items, such as “I would prefer complex to simple problems” and “I enjoy a task that involves coming up with new solutions to problems”. The present study modified the 5-point ordinal scale format to provide participants with consistently scaled ordinal questions (M = 3.89, SD = 0.79, Cronbach’s α = 0.81).
4. Results
4.1. Descriptive Analysis
Based on the demographic data, no differences between participants in both groups were revealed. A
t-test between the programming experience (
p =
0.325) and prior knowledge (
p =
0.52) also found no significant differences. Additionally, the overall pre-test results indicated that the overall level, knowledge, comprehension, and application level values were low (
Table 3).
We have also analyzed, using Pearson’s correlations, any possible relationship between knowledge, CT skills, absorption, and need for cognition (
Table 4). A significant correlation between conceptual knowledge and Algorithmic thinking was found. According to the same data analysis, Algorithmic thinking and Evaluation were also significantly correlated, whereas Conceptual knowledge was less significant than the first two levels. Students’ outcomes of hands-on tasks with educational robotics were strongly correlated with absorption and need for cognition and exhibited hierarchical correlations with CT skills measures.
4.2. Learning Outcomes
In an effort to identify the influence of educational robotics on students’ learning outcomes as well as on hands-on tasks, an ANCOVA analysis with prior knowledge as a covariate was performed. There was no significant impact of the prior knowledge in both groups on learning outcomes (F = 0.718, p = 0.412), whereas a significant difference in learning outcomes between the groups was found (F = 47.188, p < 0.001). Based on the prior knowledge test, no substantial impact on hands-on tasks was unveiled (F = 1.66, p = 0.217); however, a significant difference in students’ learning outcomes in robotics use between both groups was identified (F = 13.87, p < 0.001).
The influence of educational robots was investigated by analyzing students’ learning outcome CT skills as well as in terms of practice-based performance. As the results show, the EG compared to the CG exhibited higher means for overall learning outcomes related to CT skills and programming in practice-based tasks (
Table 5).
Beyond the three components of CT skills, we have also performed an ANCOVA test between groups, with prior knowledge as a covariate. The findings indicate that there is also no significant difference between previous knowledge and CT skills (F = 1.66, p = 0.157), whereas CT skills differed significantly between the two groups (F = 55.01, p ≤ 0.001). In addition, previous knowledge had no significant impact on Algorithmic thinking (F = 1.17, p = 0.275), whereas such skills differed significantly between groups (F = 37.78, p ≤ 0.001). Prior knowledge had no significant impact on Evaluation skills (F = 1.36, p = 0.719), and application levels were significantly different between groups (F = 13.77, p ≤ 0.001).
4.3. Absorption and Need for Cognition
After completing practice-based tasks, we counted the absorption and need for cognition of the EG. The results showed that the EG exhibited lower absorption levels, but a higher need for cognition (
Table 6).
Based on a t-test analysis, a significant difference in absorption levels between the two groups was revealed (t = 4.92, ≤0.001), as well as in need for cognition (t = −2.88, p ≤ 0.001).
5. Discussion
The aim of this study was to explore the possible link between absorption, need for cognition, and the impact of using different interactive learning platforms on undergraduate students’ learning outcomes in IoT robot-supported projects involving programming and demonstration. While Newton et al. [
35] previously argued that digital materials can enhance learning, their focus was limited to visual coding without considering the benefits of integrating various interactive learning materials. Therefore, this study aimed to investigate the effectiveness of using different interactive learning materials to teach the programming of educational robots in real-world problem-solving contexts, and how this approach could influence undergraduate students’ learning outcomes. To achieve this, we presented highly interactive and visual learning materials that varied in terms of programming to excite students’ learning outcomes. We also examined the impact of using LEGO
® WeDo software exclusively compared to using Scratch for programming robots, to determine if this approach could lead to better student outcomes related to design, development, and programming in practical hands-on tasks, while reducing absorption and the need for cognition. Overall, this study sought to contribute to the field of educational robotics and provide valuable insights into the impact of using different interactive learning platforms on students’ learning outcomes.
Regarding RQ1, we investigated whether there was a significant difference in participants’ learning outcomes regarding CT skills and programming in practice-based tasks when using Scratch and LEGO
® WeDo software. The results indicated that the EG achieved higher CT skills than the CG, which used Scratch. This was attributed to the design and demonstration of robot-supported projects and their pseudocode corrections using LEGO
® WeDo software, which enabled students to program their IoT prototypes more effectively than those who used Scratch. Our findings align with previous studies (e.g., [
20,
23]) that have reported better learning outcomes among undergraduate students who used LEGO
® robots, reflecting higher levels of flow experience when programming. This could be due to the physical interaction involved in LEGO
® WeDo-supported instruction, making it more enjoyable and interesting. Additionally, our results are consistent with de Hass et al.’s study [
33], which suggested that students’ outcomes are related to their memory ability through repeated practice using easy-to-use learning materials, leading to improved programming skills with fewer errors of omission.
As far as RQ2 is concerned, we analyzed the levels of absorption and need for cognition between the two groups. The participants from the EG exhibited improved cognition, while absorption levels in practice-based learning tasks decreased compared to the CG. In other words, participants from the EG who achieved better learning outcomes in creating IoT projects had lower absorption but higher need for cognition levels. The current study findings are consistent with Yang et al.’s [
14] conclusions that older students have a practical ability to absorb powerful ideas in projects for CT skills development when they learn fundamental issues related to programming. Additionally, this study supports Yang et al.’s [
14] implications regarding any training sessions on educational robot-supported projects in learning how to program using block-based “playable” tasks. We found that lower levels of absorption can lead to better student outcomes, resulting in more experience in knowledge gain. This may be due to our strict study time and statistical analysis. We observed a negative correlation between absorption and need for cognition, which facilitated participants in applying any gained knowledge in their IoT projects [
11]. This also means that students with lower absorption levels are more willing to practice their gained knowledge in formal instructional practice-based tasks, thus becoming more productive. Participants from the EG exhibited lower levels of absorption and may not potentially find more intrinsic value or enjoyment in IoT robot-supported instruction and physical sensory richness. However, due to higher levels of need for cognition, they might be more likely to adopt such robots and continue to utilize them over time. Although participants from the EG achieved better learning outcomes, they do not necessarily have a higher tendency for absorption.
Based on the findings discussed above, this study emphasizes the importance of instructors and educators assessing high-quality educational resources, as well as IoT simulation projects using educational robots in formal instructional contexts. Specifically, it highlights the significance of providing interactive and realistic learning experiences through “learning by doing” tasks in authentic laboratory settings on university campuses, even for participants with little to no experience in using robots. The integration of (digital) pseudocode and educational robots in promoting CT skills and programming development is crucial and underscores the vital role of IoT projects with diverse elements and perspectives. However, it is important to note that while these projects can be productive and interesting, they may come with additional costs [
20]. Moreover, the utilization of educational robotics is not without cost, and policy restrictions may limit access to open-source learning materials and platforms, which may discourage some instructors and educators from using them in classroom settings. When it comes to design features, a visually appealing environment can enhance students’ performance, particularly those without a programming background, as they work on various problem-solving exercises in a simulated reality. Finally, incorporating multi-dimensional visual features and elements with high-representational fidelity and acoustic feedback can help students achieve the course objectives more effectively.
6. Conclusions
This study aimed to provide empirical evidence by comparing two commonly utilized platforms for teaching undergraduate programming courses in designing, developing, and programming IoT projects using educational robots. The statistical analysis showed that students who engaged with the LEGO® WeDo platform achieved higher CT skills compared to their counterparts who enrolled in Scratch-supported instruction. Additionally, the study found that students who engaged with LEGO® WeDo had lower levels of absorption but higher levels of need for cognition. Prior knowledge did not significantly impact learning outcomes, but there was a significant difference in learning outcomes between the two groups.
The findings of this study contribute to the existing literature by providing empirical evidence on students’ CT skills and programming development based on their learning outcomes, highlighting key differences in students’ learning outcomes given CT and programming differences, and providing design guidelines and practical implications on how robot-supported interventions can support students with varying levels of programming backgrounds.
There are also several implications for educational designers and policy-makers. Firstly, this study highlights the importance of integrating learning materials from different interactive learning platforms to promote CT skills and programming development. Specifically, the use of educational robots in authentic and realistic laboratory tasks was found to be effective in promoting learning outcomes. This suggests that instructors and educators should consider incorporating these types of resources into their formal instructional contexts. Secondly, this study emphasizes the importance of assessing realistic and high-quality educational resources when selecting IoT simulation projects and educational robots. This is particularly relevant for instructors and educators who are not experienced in using robots. In addition, the study suggests that the use of visually appealing environments can foster better performance for students without a programming background. Thirdly, this study highlights the potential cost associated with the utilization of educational robotics. This may divert some instructors and educators from using them in class settings. Thus, policymakers need to consider providing open-source learning materials and platforms to reduce costs and encourage the wider adoption of educational robotics.
Educational practitioners should also consider the findings of this study as various implications that can be extracted. First, instructors and educators need to consider using interactive and realistic learning experiences, such as IoT simulation projects using educational robots, to promote CT skills and programming development. This approach can help students achieve higher levels of flow experience when programming and enjoy the physical interaction associated with LEGO® WeDo-supported instruction. Instructors and educators should also assess the quality of educational resources to ensure that they are realistic and of high quality. Second, instructors and educators should pay attention to the design features of learning materials. Using visually appealing environments, such as colored code blocks, can help students without a programming background perform better. Instructors and educators should provide opportunities for practice-based learning tasks, as repeated practice using easy-to-use learning materials can improve students’ programming level with fewer errors of omission. Third, the study highlights the importance of assessing absorption and the need for cognition levels. Instructors and educators should be aware that lower absorption levels can lead to better student outcomes, as participants with lower absorption levels may be more willing to practice their gained knowledge in formal instructional practice-based tasks. Additionally, higher levels of need for cognition may lead to students adopting educational robots and continuing to utilize them over time.
Finally, instructors and educators should be aware that the utilization of educational robotics is not costless, and the use of open-source learning materials and platforms may be limited by policy restrictions. Therefore, instructors and educators need to assess the costs and benefits of using educational robotics in laboratory settings and determine whether it aligns with their teaching objectives. The study also suggests that students with lower absorption levels may be more willing to practice their gained knowledge in formal instructional practice-based tasks, thus becoming more productive. Educational designers and policy-makers should consider this when designing instructional materials and courses that aim to promote learning outcomes.










{kind=link}
{kind=link}