



Using Educational Robotics in Pre-Service Teacher Training: Orchestration between an Exploration Guide and Teacher Role

 ,
,  , , , and
, , , and 
Abstract
1. Introduction
- Maintain a balance between constructivist freedom and minimal guidance;
- Offer suggestions for action and reflection;
- Include screenshots of the software, especially if the guide is aimed at younger learners;
- Include questions that provoke discussion;
- Gradually increase the level of complexity of the questions and tasks throughout the guide;
- Make guides available in printed and digital format;
- Make guides adaptable to different contexts and users;
- Suggest that guide users keep written records of their exploration of the tasks;
- Include instructions that allow users to start exploring the software;
- Include descriptions of relevant aspects of the software;
- Include instructions on how to run the simulation;
- Promote discussion of the results;
- Create conditions to propose and test hypotheses.
2. Educational Robotics
3. Materials and Methods
3.1. Participants
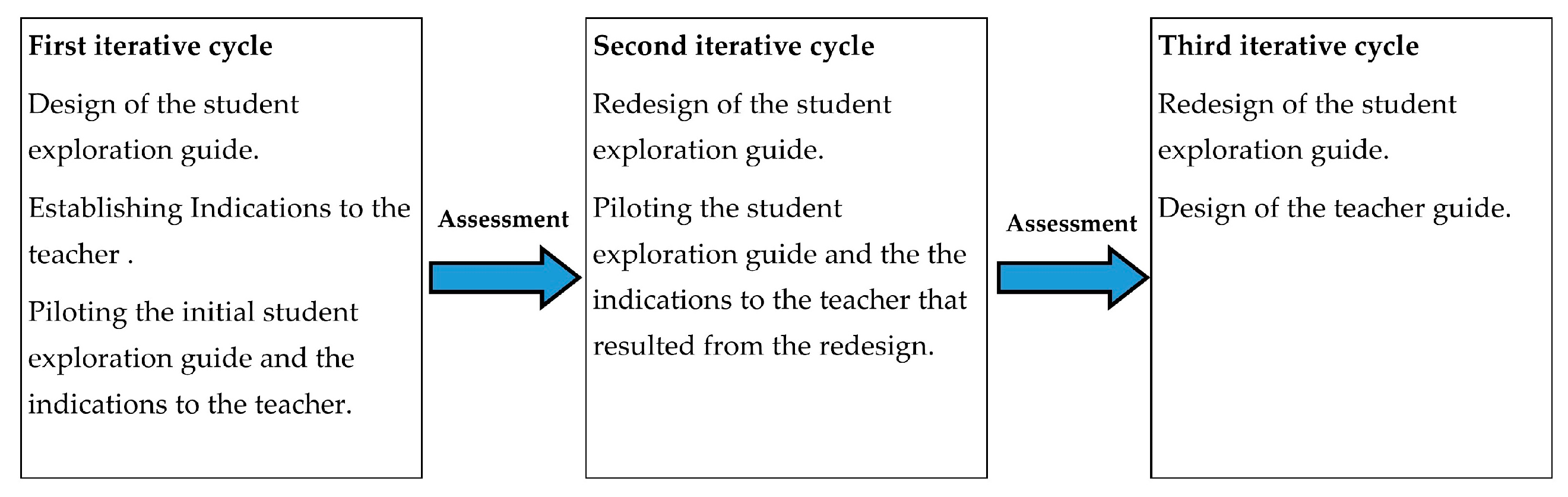
3.2. Study Phases
3.2.1. First Iterative Cycle
Starting Point
Design of the First Version of the Student Exploration Guide
- (O1)
- Learn to programme the Engino Mini robot to move in different directions.
- (O2)
- Learn to programme the Engino Mini robot so that it can travel in a closed circuit without colliding with the limiters.
- The software exploration foreseen for the first part of the guide should be undertaken individually, with indications from the teacher for the whole class group;
- For tasks 1, 2 and 3, virtual rooms are created for each group, where they carry out the tasks. After completing the first task, they return to the main room to share and discuss the solutions and their efficiency. It is hoped that this allows students to understand that it is possible to create different algorithms that fulfil the same objective. This procedure is repeated for the remaining tasks.
First Intervention
Assessment
3.2.2. Second Iterative Cycle
First Redesign of the Student Exploration Guide and Teacher Actions
Second Intervention
Assessment
3.2.3. Third Iterative Cycle
Second Redesign of the Student Exploration Guide
Design of the Teacher’s Guide
4. Results
4.1. First Iterative Cycle
4.2. Second Iterative Cycle
4.3. Third Iterative Cycle
4.3.1. Third Redesign of the Student Exploration Guide
4.3.2. Design of the Teacher’s Guide
5. Discussion of Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Appendix A. Student Exploration Guide
- Learn to programme the Engino Mini robot to move in different directions;
- Learn to programme the Engino Mini robot so that it can travel in a closed loop without colliding with the limiters.






Appendix B. Teacher’s Guide








References
- Wiley, D.; Bliss, T.J.; McEwen, M. Open Educational Resources: A Review of the Literature. In Handbook of Research on Educational Communications and Technology; Spector, J.M., Merrill, M.D., Elen, J., Bishop, M.J., Eds.; Springer New York: New York, NY, USA, 2014; pp. 781–789. ISBN 978-1-4614-3185-5. [Google Scholar]
- Mishra, S. Open Educational Resources: Removing Barriers from within. Distance Educ. 2017, 38, 369–380. [Google Scholar] [CrossRef]
- Richter, T.; McPherson, M. Open Educational Resources: Education for the World? Distance Educ. 2012, 33, 201–219. [Google Scholar] [CrossRef]
- Papert, S. Mindstorms Children, Computers, and Powerful Ideas, 2nd ed.; Basic Books, Inc.: New York, NY, USA, 1980; Volume 1, ISBN 978-0-465-04627-0. [Google Scholar]
- Lopes, J.B.; Costa, C. Digital Resources in Science, Mathematics and Technology Teaching—How to Convert Them into Tools to Learn. In Proceedings of the Technology and Innovation in Learning, Teaching and Education; Tsitouridou, M., Diniz, J.A., Mikropoulos, T.A., Eds.; Springer: Cham, Switzerland, 2019; pp. 243–255. [Google Scholar]
- Koehler, M.J.; Mishra, P. What Is Technological Pedagogical Content Knowledge? Contemporary Issues in Technology and Teacher Education. Contemp. Issues Technol. Teach. Educ. 2009, 9, 60–70. [Google Scholar]
- Herrington, J.; Reeves, T.C.; Oliver, R. Authentic Learning Environments. In Handbook of Research on Educational Communications and Technology; Spector, J.M., Merrill, M.D., Elen, J., Bishop, M.J., Eds.; Springer: New York, NY, USA, 2014; pp. 401–412. ISBN 978-1-4614-3185-5. [Google Scholar]
- Paiva, J.C.; Da Costa, L.A. Exploration Guides as a Strategy to Improve the Effectiveness of Educational Software in Chemistry. J. Chem. Educ. 2010, 87, 589–591. [Google Scholar] [CrossRef]
- Drijvers, P.; Grauwin, S.; Trouche, L. When Bibliometrics Met Mathematics Education Research: The Case of Instrumental Orchestration. ZDM Math. Educ. 2020, 52, 1455–1469. [Google Scholar] [CrossRef]
- Drijvers, P.; Doorman, M.; Boon, P.; Reed, H.; Gravemeijer, K. The Teacher and the Tool: Instrumental Orchestrations in the Technology-Rich Mathematics Classroom. Educ. Stud. Math. 2010, 75, 213–234. [Google Scholar] [CrossRef]
- Drijvers, P.; Doorman, M.; Boon, P.; van Gisbergen, S. Instrumental orchestration: Theory and practice. In Proceedings of the Proceedings of the Sixth Congress of the European Society for Research in Mathematics Education; INRP: Lyon, France, 2009; p. 10. [Google Scholar]
- NCTM. Principles to Actions: Ensuring Mathematical Success for All; National Council of Teachers of Mathematics, Inc.: Reston, VA, USA, 2014; ISBN 0873537742. [Google Scholar]
- Hegedus, S.; Laborde, C.; Brady, C.; Dalton, S.; Siller, H.-S.; Tabach, M.; Trgalova, J.; Moreno-Armella, L. Uses of Technology in Upper Secondary Mathematics Education; ICME-13 Topical Surveys; Springer: Cham, Switzerland, 2017; Volume 2018, ISBN 978-3-319-42610-5. [Google Scholar]
- Tabach, M.; Trgalová, J. The Knowledge and Skills That Mathematics Teachers Need for ICT Integration: The Issue of Standards. In Technology in Mathematics Teaching: Selected Papers of the 13th ICTMT Conference; Springer: Cham, Switzerland, 2019; pp. 183–203. [Google Scholar]
- Kuster, G.; Johnson, E.; Keene, K.; Andrews-Larson, C. Inquiry-Oriented Instruction: A Conceptualization of the Instructional Principles. Primus 2018, 28, 13–30. [Google Scholar] [CrossRef]
- Lazonder, A.W.; Harmsen, R. Meta-Analysis of Inquiry-Based Learning: Effects of Guidance. Rev. Educ. Res. 2016, 86, 681–718. [Google Scholar] [CrossRef]
- Lopes, J.B.; Costa, C. Converting Digital Resources into Epistemic Tools Enhancing STEM Learning. In Proceedings of the Technology and Innovation in Learning, Teaching and Education; Reis, A., Barroso, J., Lopes, J.B., Mikropoulos, T., Fan, C.-W., Eds.; Springer: Cham, Switzerland, 2021; pp. 3–20. [Google Scholar]
- Tselegkaridis, S.; Sapounidis, T. Simulators in Educational Robotics: A Review. Educ. Sci. 2021, 11, 11. [Google Scholar] [CrossRef]
- Kuhl, P.K.; Lim, S.-S.; Guerriero, S.; van Damme, D. Developing Minds in the Digital Age; Educational Research and Innovation; OECD Publishing: Paris, France, 2019. [Google Scholar] [CrossRef]
- Alimisis, D. Robotics in Education & Education in Robotics: Shifting Focus from Technology to Pedagogy. In Proceedings of the 3rd International Conference on Robotics in Education; Charles University in Prague: Prague, Czech Republic, 2012; pp. 7–14. [Google Scholar]
- Keren, G.; Fridin, M. Kindergarten Social Assistive Robot (KindSAR) for Children’s Geometric Thinking and Metacognitive Development in Preschool Education: A Pilot Study. Comput. Hum. Behav. 2014, 35, 400–412. [Google Scholar] [CrossRef]
- Zhong, B.; Xia, L. A Systematic Review on Exploring the Potential of Educational Robotics in Mathematics Education. Int. J. Sci. Math. Educ. 2020, 18, 79–101. [Google Scholar] [CrossRef]
- Anwar, S.; Bascou, N.A.; Menekse, M.; Kardgar, A. A Systematic Review of Studies on Educational Robotics. J. Pre-Coll. Eng. Educ. Res. 2019, 9, 19–42. [Google Scholar] [CrossRef]
- Schina, D.; Valls-Bautista, C.; Borrull-Riera, A.; Usart, M.; Esteve-González, V. An Associational Study: Preschool Teachers’ Acceptance and Self-Efficacy towards Educational Robotics in a Pre-Service Teacher Training Program. Int. J. Educ. Technol. High Educ. 2021, 18, 28. [Google Scholar] [CrossRef] [PubMed]
- Huang, R.; Zbiek, R.M. Prospective Secondary Mathematics Teacher Preparation and Technology. In The Mathematics Education of Prospective Secondary Teachers around the World; Springer: Cham, Switzerland, 2017; pp. 17–23. ISBN 978-3-319-38965-3. [Google Scholar]
- Guin, D.; Trouche, L. Mastering by the Teacher of the Instrumental Genesis in CAS Environments: Necessity of Intrumental Orchestrations. Zent. Für Didakt. Der Math. 2002, 34, 204–211. [Google Scholar] [CrossRef]
- Pedro, N.; Monteiro, J.; Fonte, M. Inovação Pedagógica Em E-Learning: Proposta de Um Framework de (Auto) Avaliação de Práticas No Ensino Superior. In Experiências de Inovação Didática no Ensino Superior; Ministério da Educação e Ciência: Lisboa, Portugal, 2015; pp. 257–270. [Google Scholar]
- Jung, S.E.; Won, E.S. Systematic Review of Research Trends in Robotics Education for Young Children. Sustainability 2018, 10, 905. [Google Scholar] [CrossRef]
- Toh, L.P.E.; Causo, A.; Tzuo, P.W.; Chen, I.M.; Yeo, S.H. A Review on the Use of Robots in Education and Young Children. Educ. Technol. Soc. 2016, 19, 148–163. [Google Scholar]
- Athanasiou, L.; Mikropoulos, T.A.; Mavridis, D. Robotics Interventions for Improving Educational Outcomes—A Meta-Analysis. Commun. Comput. Inf. Sci. 2019, 993, 91–102. [Google Scholar]
- Miller, D.P.; Nourbakhsh, I. Robotics for Education. In Springer Handbook of Robotics; Springer: Cham, Switzerland, 2016; pp. 2115–2134. [Google Scholar]
- Kim, C.; Yuan, J.; Gleasman, C.; Shin, M.; Hill, R.B. Preparing Pre-Service Early Childhood Teachers to Teach Mathematics with Robots. Comput. Support. Collab. Learn. Conf. CSCL 2017, 2, 617–620. [Google Scholar]
- Benitti, F.B.V. Exploring the Educational Potential of Robotics in Schools: A Systematic Review. Comput. Educ. 2012, 58, 978–988. [Google Scholar] [CrossRef]
- Angeli, C.; Jaipal-Jamani, K. Preparing Pre-Service Teachers to Promote Computational Thinking in School Classrooms. In Computational Thinking in the STEM Disciplines; Springer: Cham, Switzerland, 2018; pp. 127–150. [Google Scholar]
- Giacomassi Luciano, A.P.; Altoé Fusinato, P.; Carvalhais Gomes, L.; Luciano, A.; Takai, H. The Educational Robotics and Arduino Platform: Constructionist Learning Strategies to the Teaching of Physics. J. Phys. Conf. Ser. 2019, 1286, 012044. [Google Scholar] [CrossRef]
- Kim, C.; Kim, D.; Yuan, J.; Hill, R.B.; Doshi, P.; Thai, C.N. Robotics to Promote Elementary Education Pre-Service Teachers’ STEM Engagement, Learning, and Teaching. Comput. Educ. 2015, 91, 14–31. [Google Scholar] [CrossRef]
- Kucuk, S.; Sisman, B. Behavioral Patterns of Elementary Students and Teachers in One-to-One Robotics Instruction. Comput. Educ. 2017, 111, 31–43. [Google Scholar] [CrossRef]
- Souza, C.D.F.; Júnior, A.S.; Barbosa, F. A Interseção Da Robótica Educacional e a Matemática Na Formação Inicial de Professores: Reflexões Acerca Das Conexões Matemáticas. In Proceedings of the Livro de Atas do EIEM 2019, Encontro de Investigação em Educação Matemática; Amado, N., Canavarro, A.P., Carreira, S., Ferreira, R.S., Vale, I., Eds.; SPIEM: Loulé, Portugal, 2019; pp. 387–400. [Google Scholar]
- Pedersen, B.K.M.K.; Larsen, J.C.; Nielsen, J. The Effect of Commercially Available Educational Robotics: A Systematic Review. In Proceedings of the Robotics in Education; Merdan, M., Lepuschitz, W., Koppensteiner, G., Balogh, R., Obdržálek, D., Eds.; Springer: Cham, Switzerland, 2020; pp. 14–27. [Google Scholar]
- Stager, G.S. Papert’s Prison Fab Lab. In Proceedings of the 12th International Conference on Interaction Design and Children; ACM: New York, NY, USA, 2013; pp. 487–490. [Google Scholar]
- Younis, H.; Mohamed, A.S.A.; Jamaludin, R.; Wahab, M.N.A. Survey of Robotics in Education, Taxonomy, Applications, and Platforms during COVID-9. Comput. Mater. Contin. 2021, 67, 687–707. [Google Scholar] [CrossRef]
- Alves Gomes, A.S.; Da Silva, J.F.; De Lima Teixeira, L.R. Educational Robotics in Times of Pandemic: Challenges and Possibilities. In Proceedings of the 2020 Latin American Robotics Symposium (LARS), 2020 Brazilian Symposium on Robotics (SBR) and 2020 Workshop on Robotics in Education (WRE), Natal, Brazil, 9–13 November 2020; IEEE: Natal, Brazil, 2020; pp. 1–5. [Google Scholar]
- Birk, A.; Dineva, E.; Maurelli, F.; Nabor, A. A Robotics Course during COVID-19: Lessons Learned and Best Practices for Online Teaching beyond the Pandemic. Robotics 2020, 10, 5. [Google Scholar] [CrossRef]
- Pasalidou, C.; Fachantidis, N. Distance Learning in the Era of COVID-19: Supporting Educational Robotics with Augmented Reality. In Proceedings of the Education in & with Robotics to Foster 21st-Century Skills; Malvezzi, M., Alimisis, D., Moro, M., Eds.; Springer: Cham, Switzerland, 2021; pp. 39–51. [Google Scholar]
- Samuels, P.; Haapasalo, L. Real and Virtual Robotics in Mathematics Education at the School-University Transition. Int. J. Math. Educ. Sci. Technol. 2012, 43, 285–301. [Google Scholar] [CrossRef]
- Nikolos, D.; Misirli, A.; Komis, V. Children’s Debugging Processes and Strategies with a Simulated Robot: A Case Study. In Proceedings of the Education in & with Robotics to Foster 21st-Century Skills; Malvezzi, M., Alimisis, D., Moro, M., Eds.; Springer: Cham, Switzerland, 2021; pp. 64–74. [Google Scholar]
- Olari, V.; Cvejosk, K.; Eide, Ø. Introduction to Machine Learning with Robots and Playful Learning. In Proceedings of the AAAI Conference on Artificial Intelligence, online, 2–9 February 2021; pp. 15630–15639. [Google Scholar] [CrossRef]
- Ketterl, M.; Jost, B.; Leimbach, T.; Budde, R. Open Roberta—A Web Based Approach to Visually Program Real Educational Robots. Tidsskr. Læring Og Medier 2015, 1–22. [Google Scholar] [CrossRef]
- Ángel-Díaz, C.M.; Segredo, E.; Arnay, R.; León, C. Simulador de Robótica Educativa Para La Promoción Del Pensamiento Computacional. Rev. De Educ. A Distancia 2020, 20, 63. [Google Scholar] [CrossRef]
- Barab, S.; Squire, K. Design-Based Research: Putting a Stake in the Ground. J. Learn. Sci. 2004, 13, 1–14. [Google Scholar] [CrossRef]
- Gravemeijer, K.; Cobb, P. Design Research from a Learning Design Perspective. In Educational Design Research; Routledge: Abingdon, UK, 2006; pp. 29–63. [Google Scholar]
- Anderson, T.; Shattuck, J. Design-Based Research: A Decade of Progress in Education Research? Educ. Res. 2012, 41, 16–25. [Google Scholar] [CrossRef]
- Reeves, T. Design Research from a Technology Perspective. In Educational Design Research; Akker, J.V.D., Gravemeijer, K., McKenney, S., Nieveen, N., Eds.; Routledge: New York, NY, USA, 2006; pp. 64–78. [Google Scholar]
- Cohen, L.; Manion, L.; Morrison, K. Research Methods in Education, 8th ed.; Routledge: London, UK, 2018; ISBN 978-1-315-45653-9. [Google Scholar]
- Kaiser, G. Mathematical Modelling and Applications in Education. In Encyclopedia of Mathematics Education; Lerman, S., Ed.; Springer: Cham, Switzerland, 2020; pp. 553–561. [Google Scholar]
- Chan, C.K.K. Co-Regulation of Learning in Computer-Supported Collaborative Learning Environments: A Discussion. Metacognition Learn. 2012, 7, 63–73. [Google Scholar] [CrossRef]
- Lederman, D.J.S. Teaching Scientific Inquiry: Exploration, Directed, Guided, and Opened-Ended Levels. Natl. Geogr. Sci. Best Pract. Res. Base 2009, 8, 20. [Google Scholar]
- Malan, D.J.; Leitner, H.H. Scratch for Budding Computer Scientists. ACM SIGCSE Bull. 2007, 39, 223–227. [Google Scholar] [CrossRef]
- Stein, M.K.; Engle, R.A.; Smith, M.S.; Hughes, E.K. Orchestrating Productive Mathematical Discussions: Helping Teachers Learn to Better Incorporate Student Thinking. In Socializing Intelligence Through Academic Talk and Dialogue; American Educational Research Association: 2015; pp. 375–388. Available online: http://www.jstor.org/stable/j.ctt1s474m1.32 (accessed on 11 August 2022).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Task | Purpose | |
|---|---|---|
| 1. Programming simple movements | 1.1. Programme the robot to keep moving forward for 7 s. | Programme a simple instruction and run its simulation. |
| 1.2. Find a solution to keep the robot moving for 10 s. | Modify a simple instruction to respect imposed conditions. | |
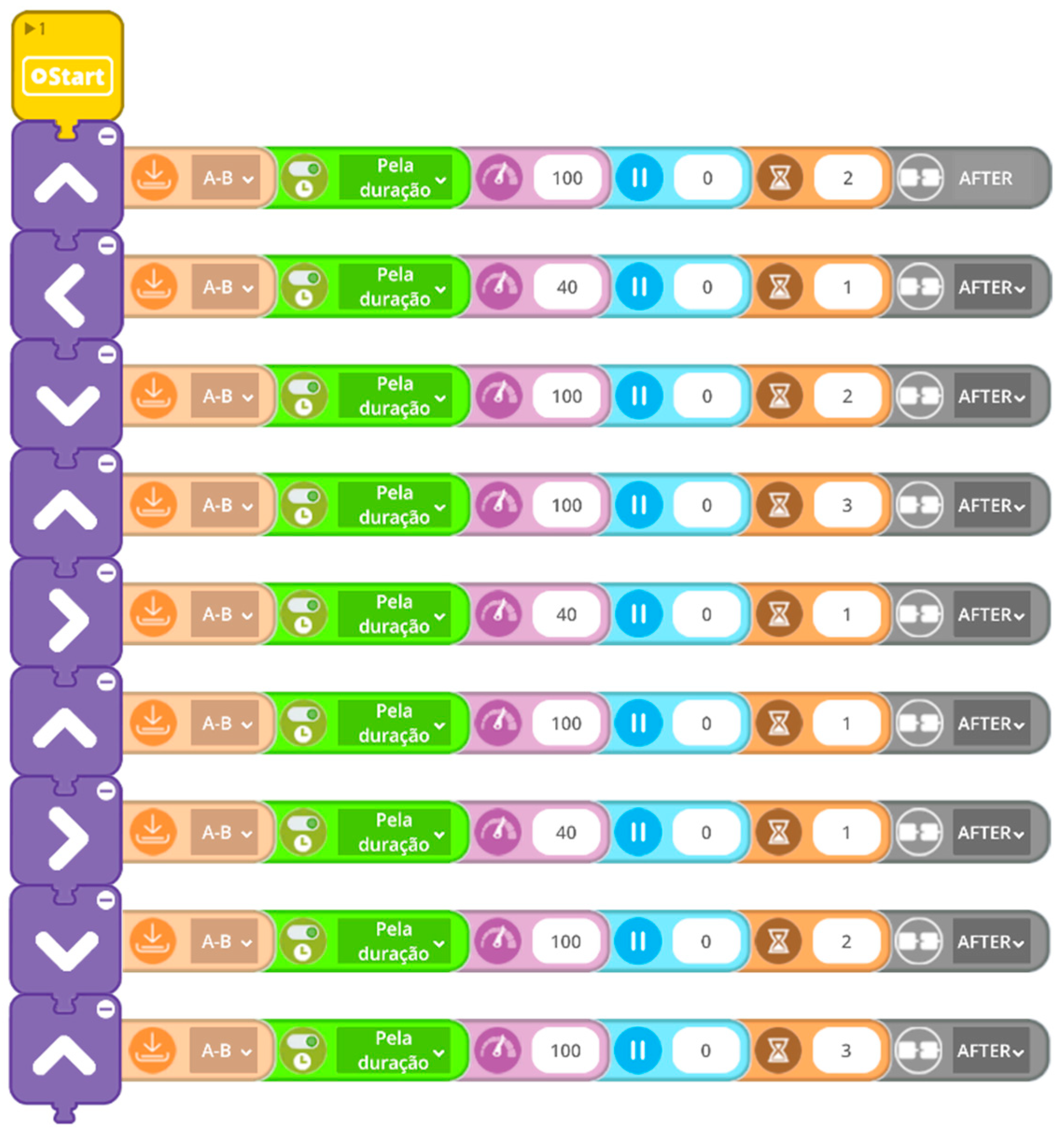
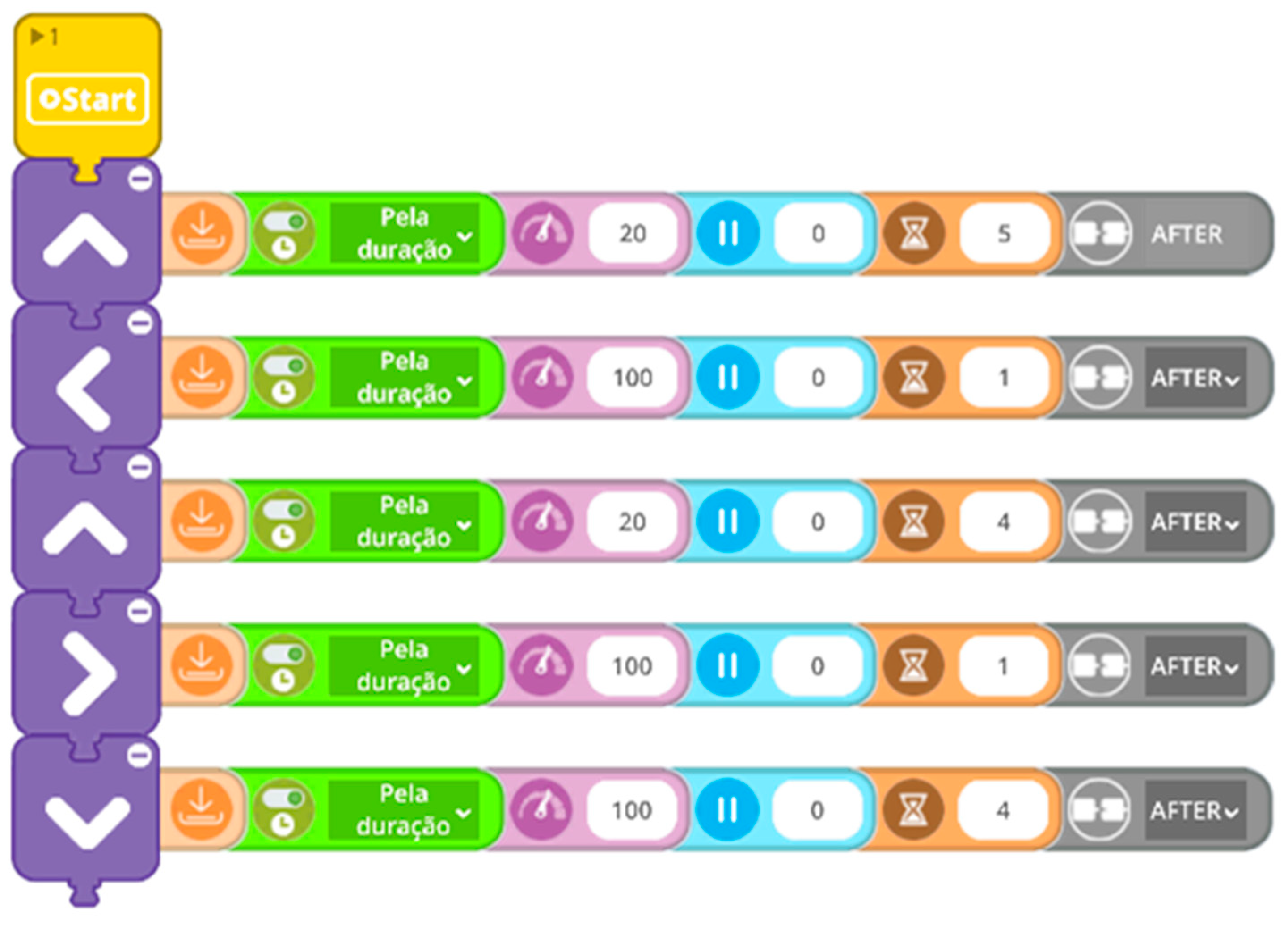
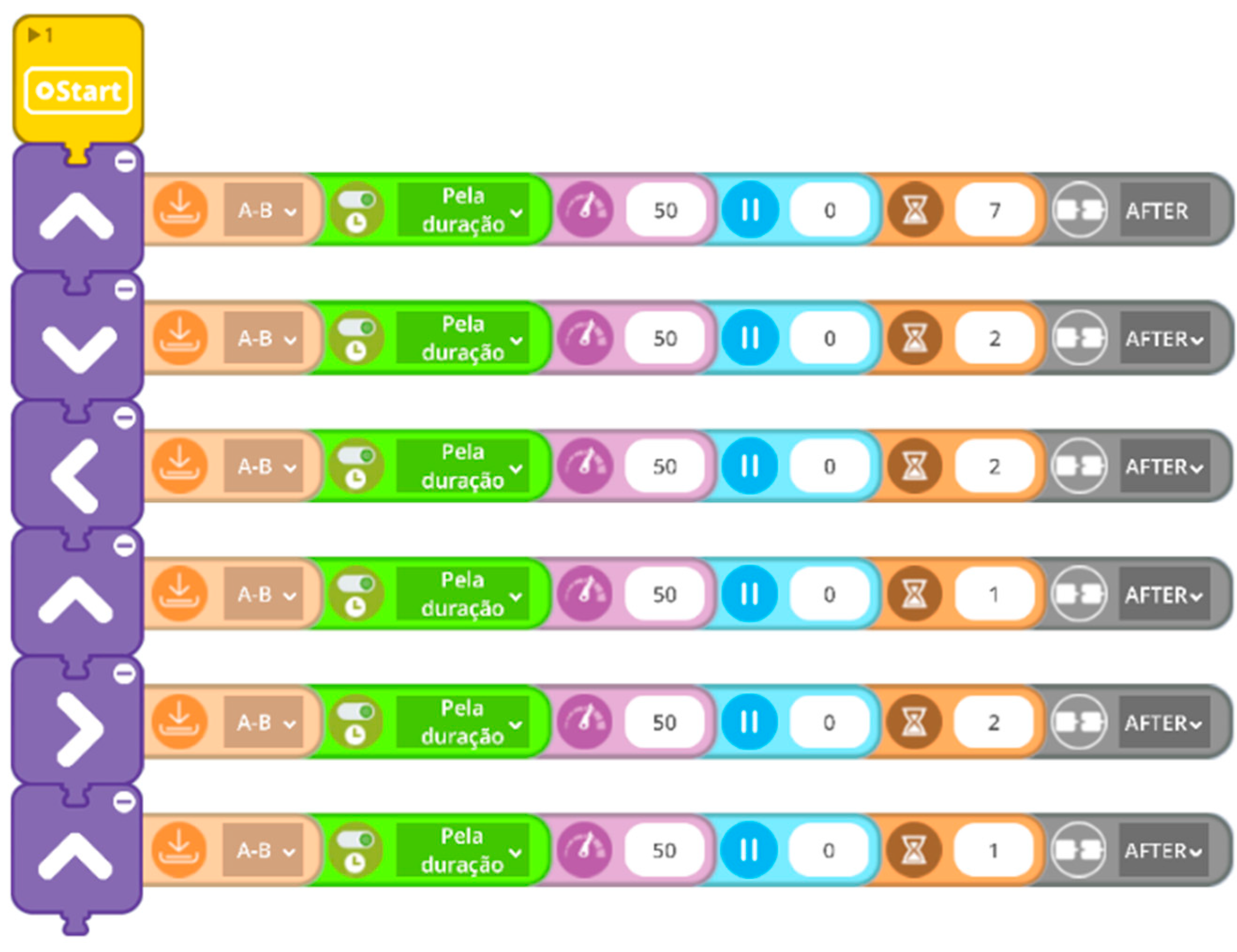
| 1.3. Create and run an algorithm in the simulator that contains the four available movements (forward; backward; turn left and turn right) with a duration of 15 s. | Create an algorithm with a sequence of instructions. | |
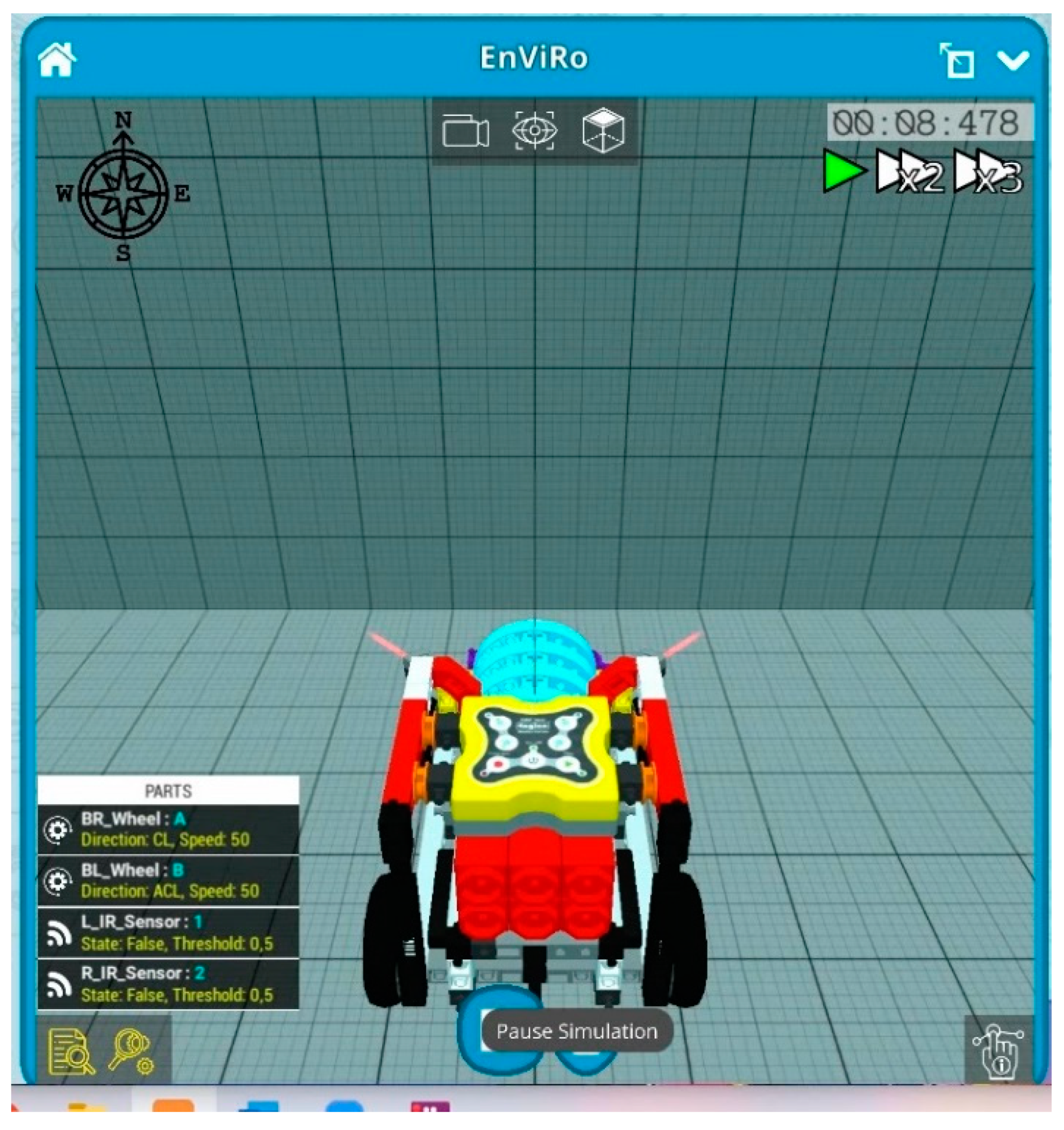
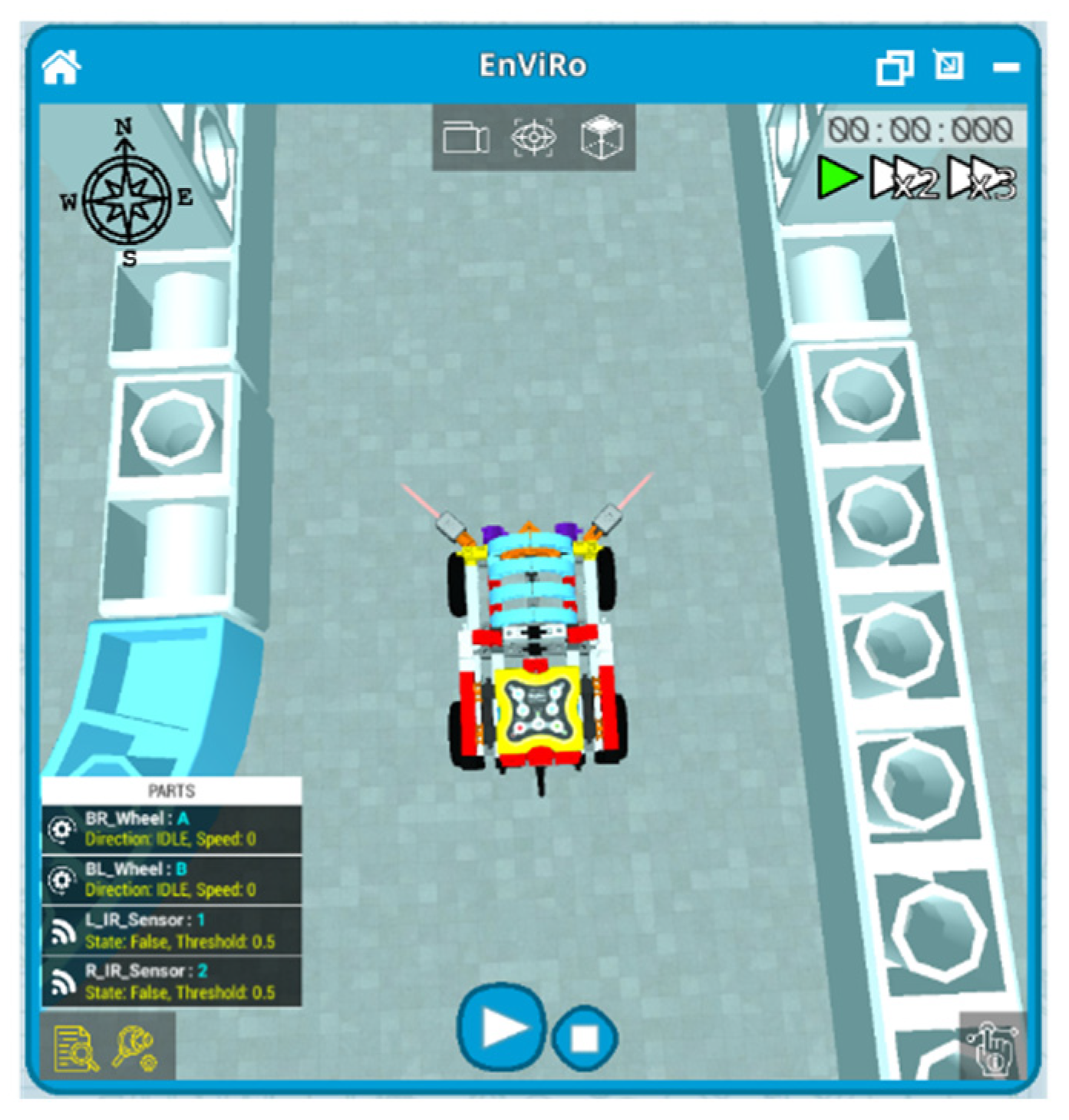
| 2. Motion and proximity sensors | 2.1. Programme the robot to move forward for 10 s at a speed of 50. Open the Simulator and, before running the simulation, activate Text Feedback and Visual Feedback. | Understand that it is possible to receive information from the robot sensors. |
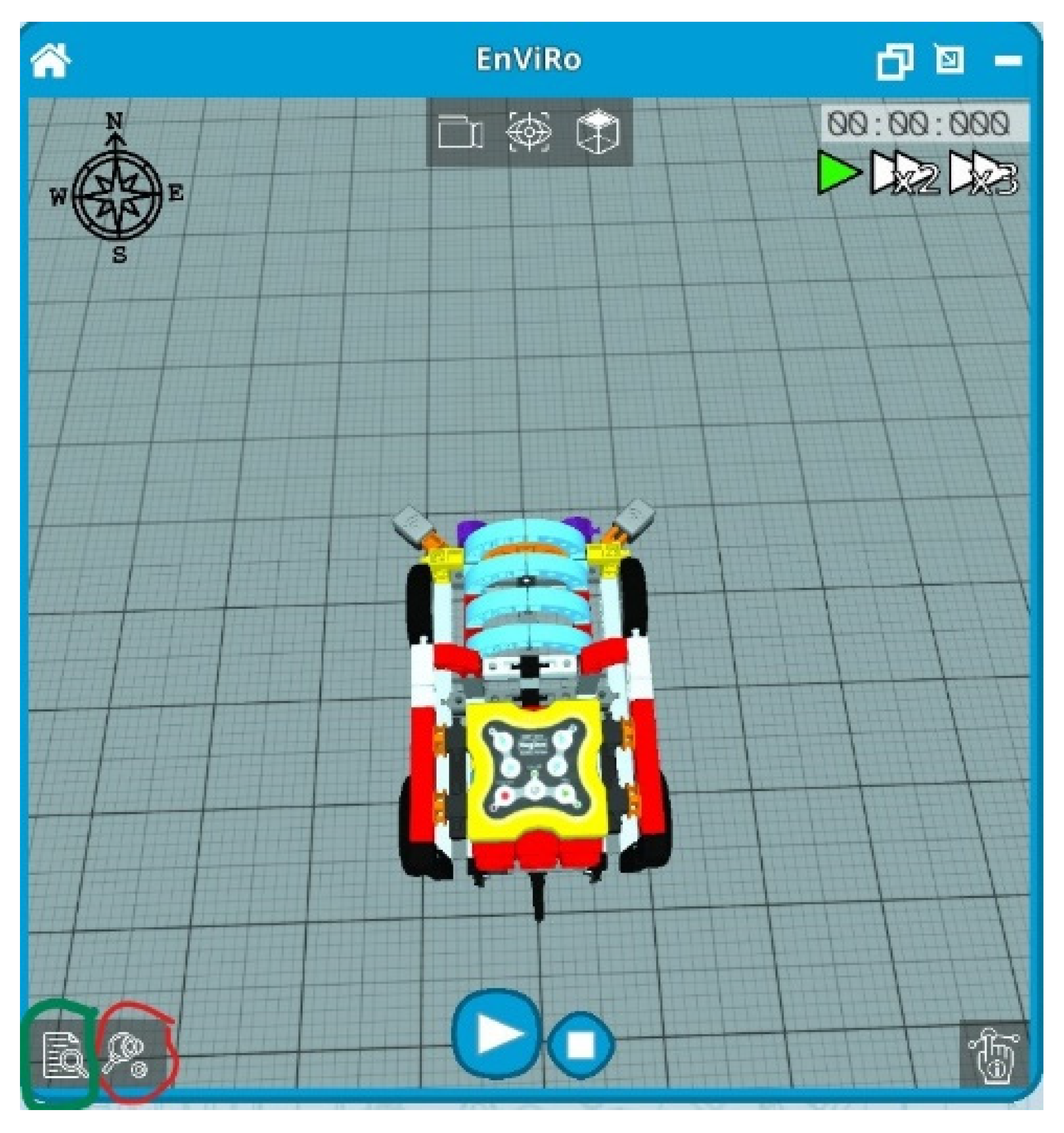
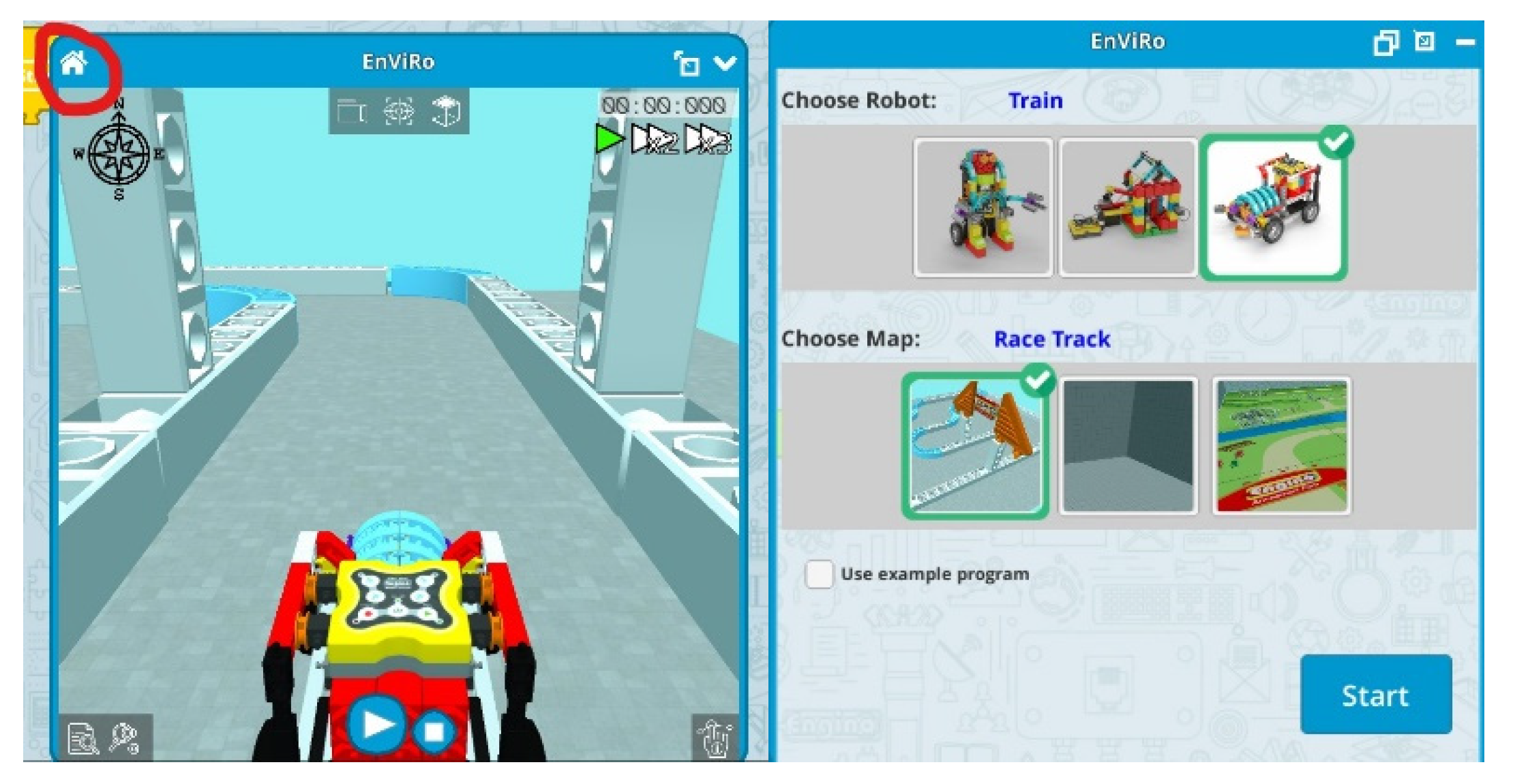
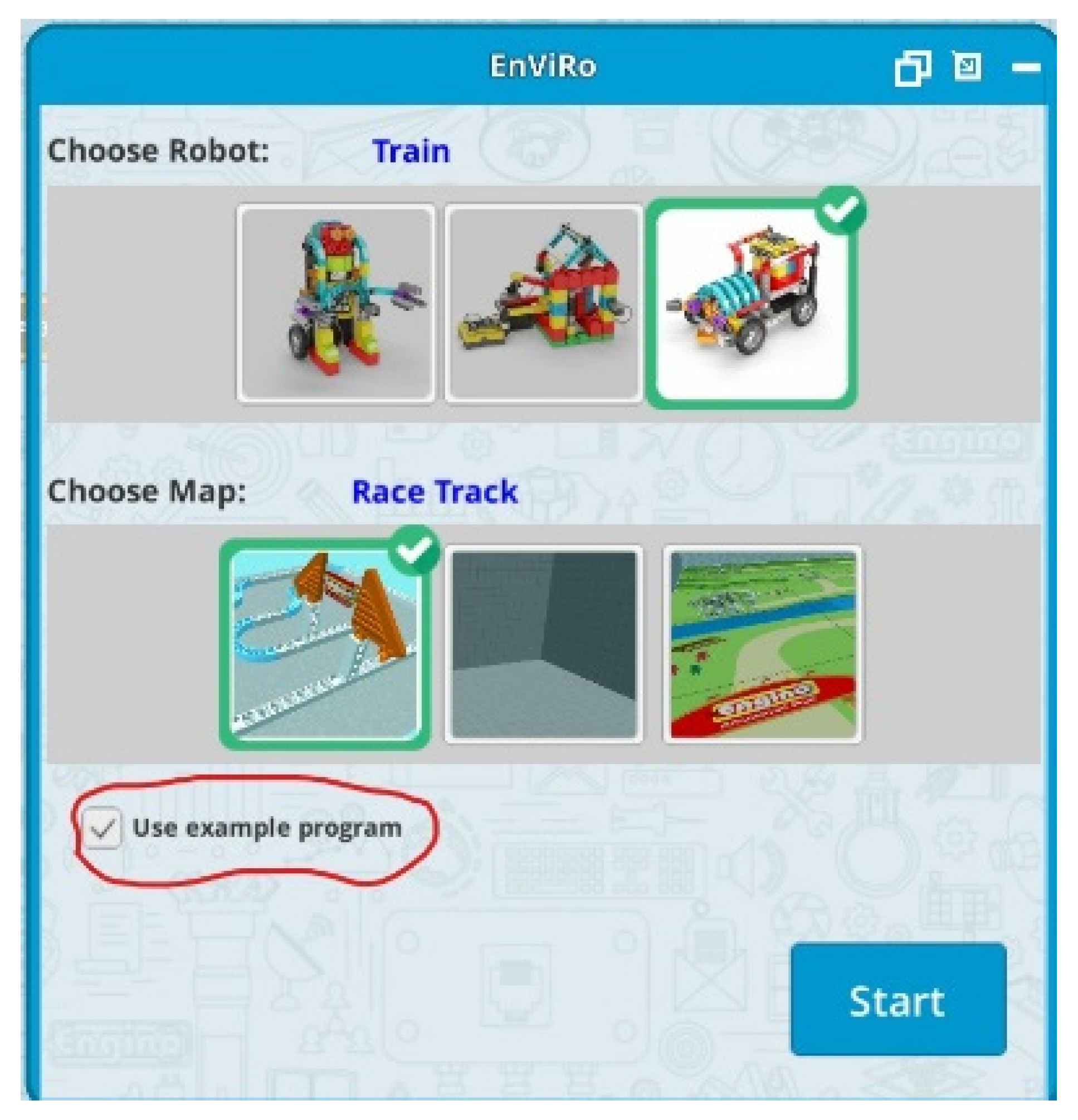
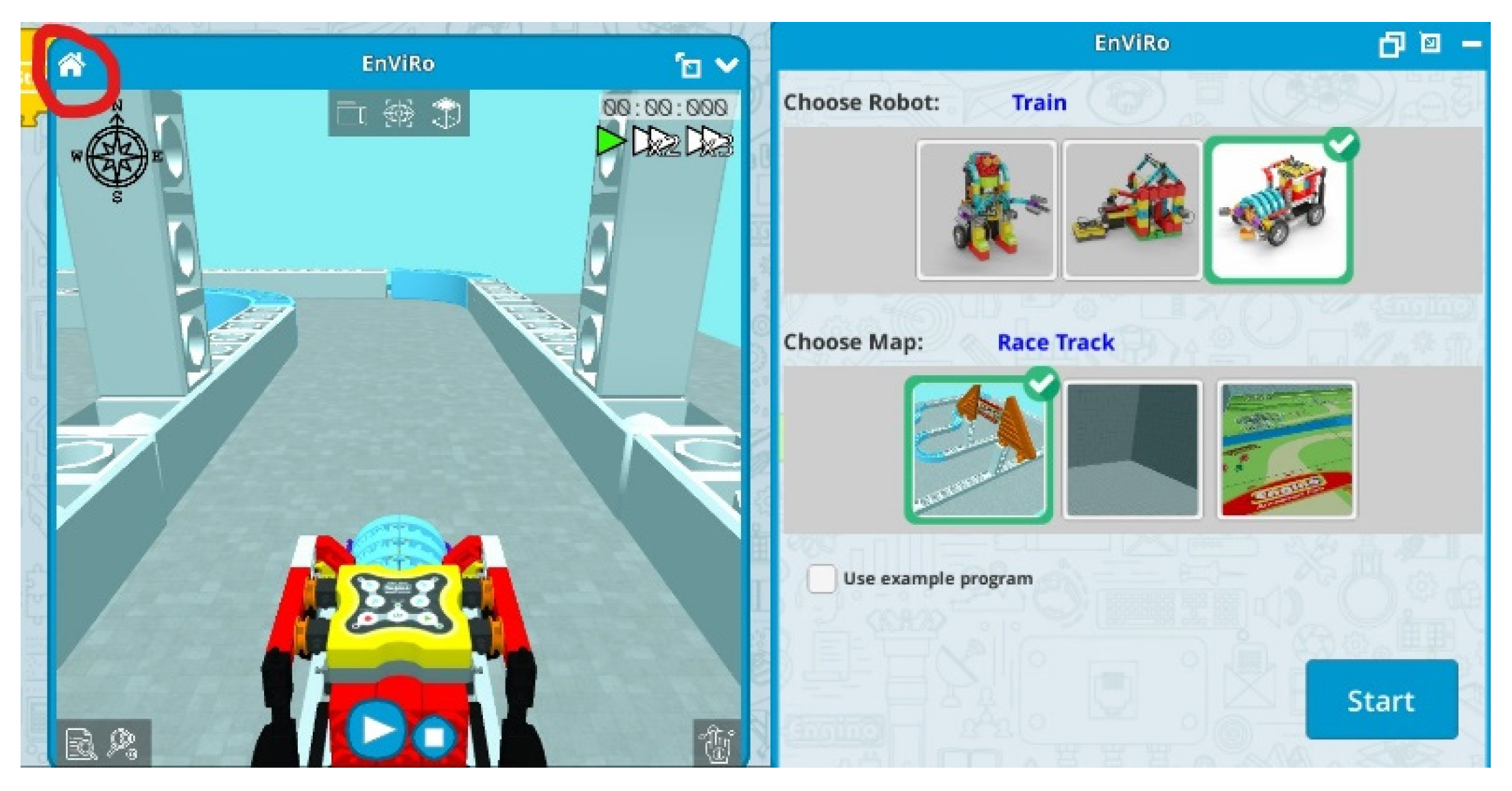
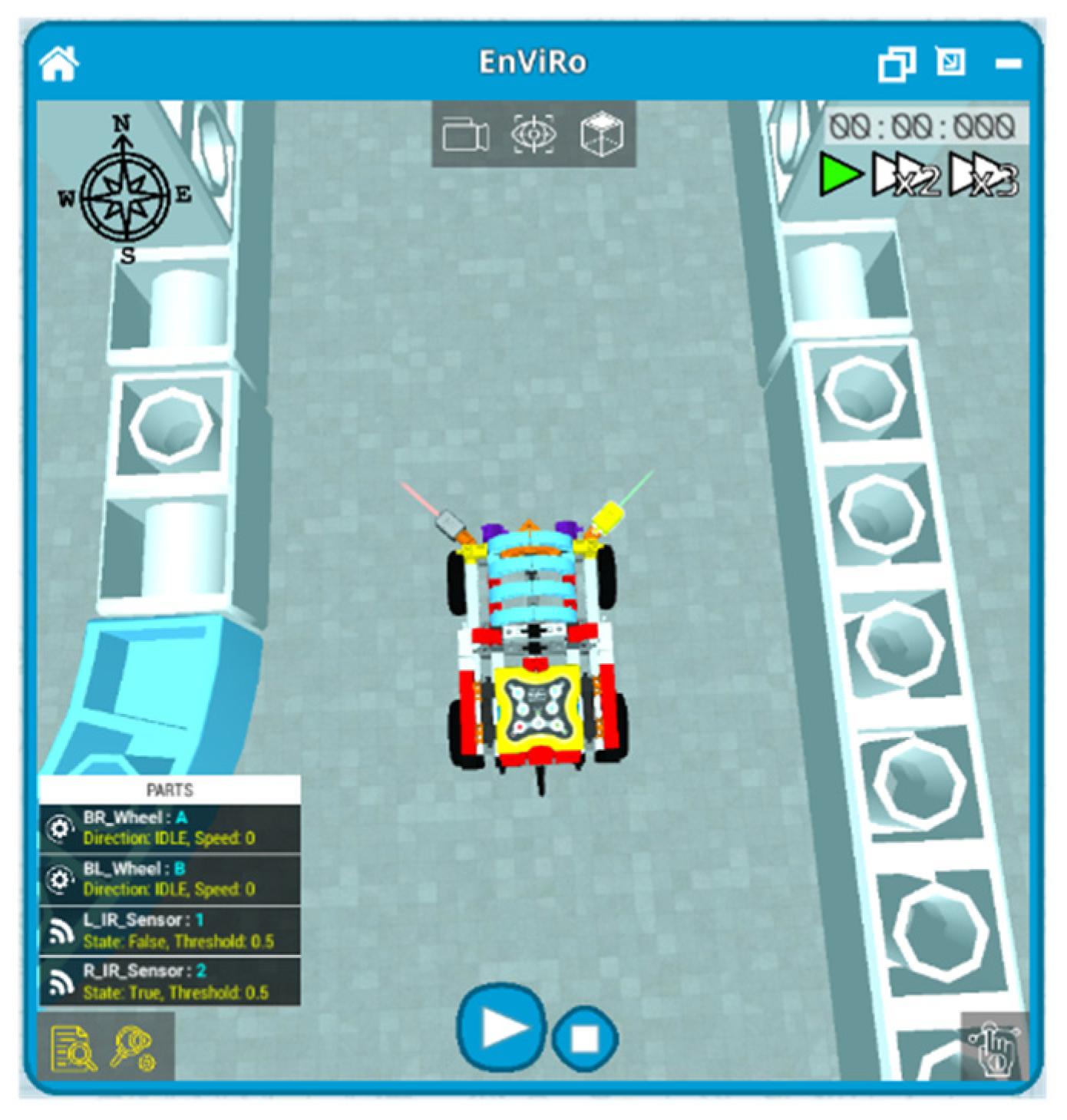
| 2.2. In the EnViRo tab, select Back to Home, then the Race Track scenario, with the same robot. 2.2.1. Programme the robot to move forward forever at a speed of 100. Open the Simulator and, before running the simulation, activate Visual Feedback. Briefly describe what you observed. 2.2.2. Find out how to programme the robot to avoid the first collision and test your algorithm in the Simulator. | Create an algorithm that enables them to programme the robot to react according to the information returned by the sensors, achieving the intended objective. | |
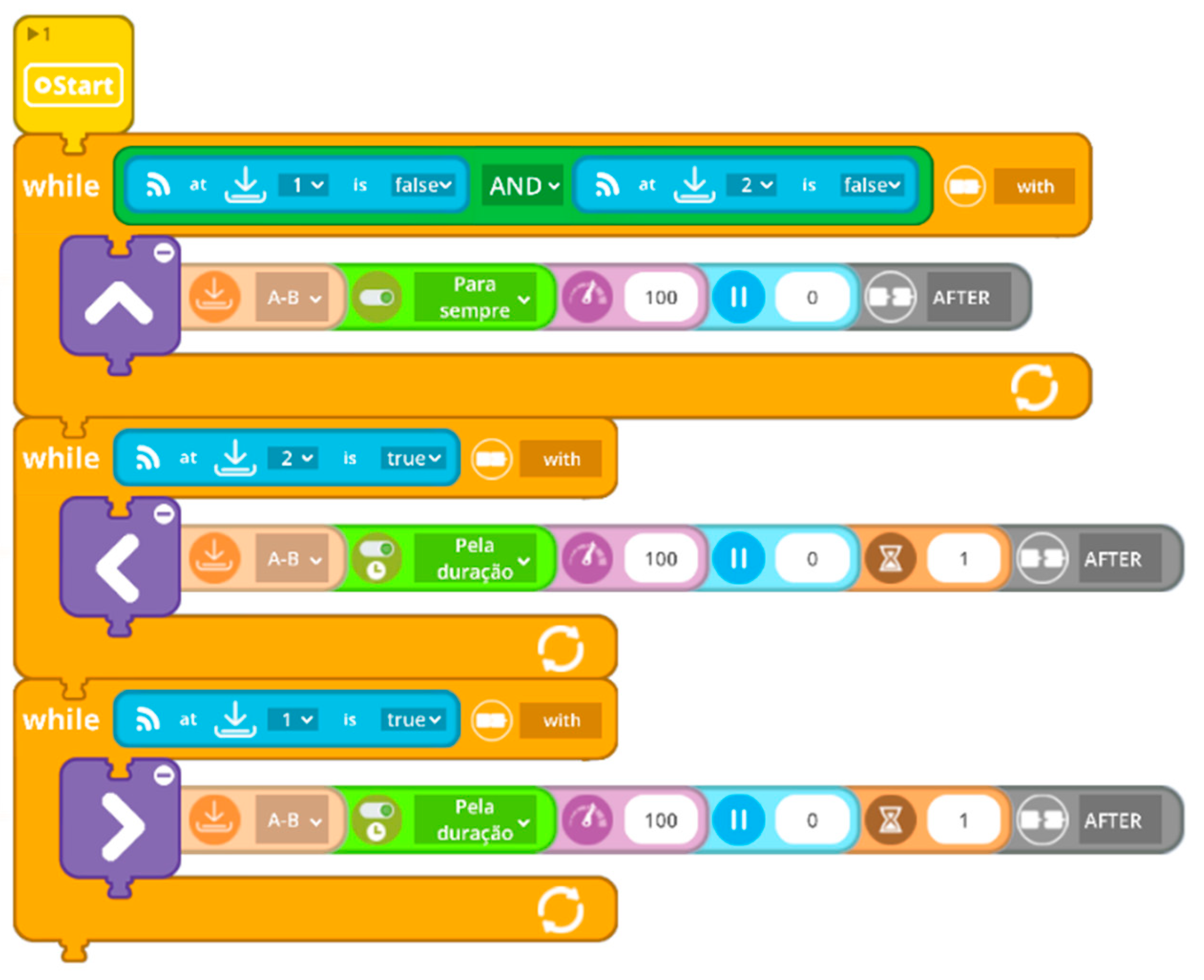
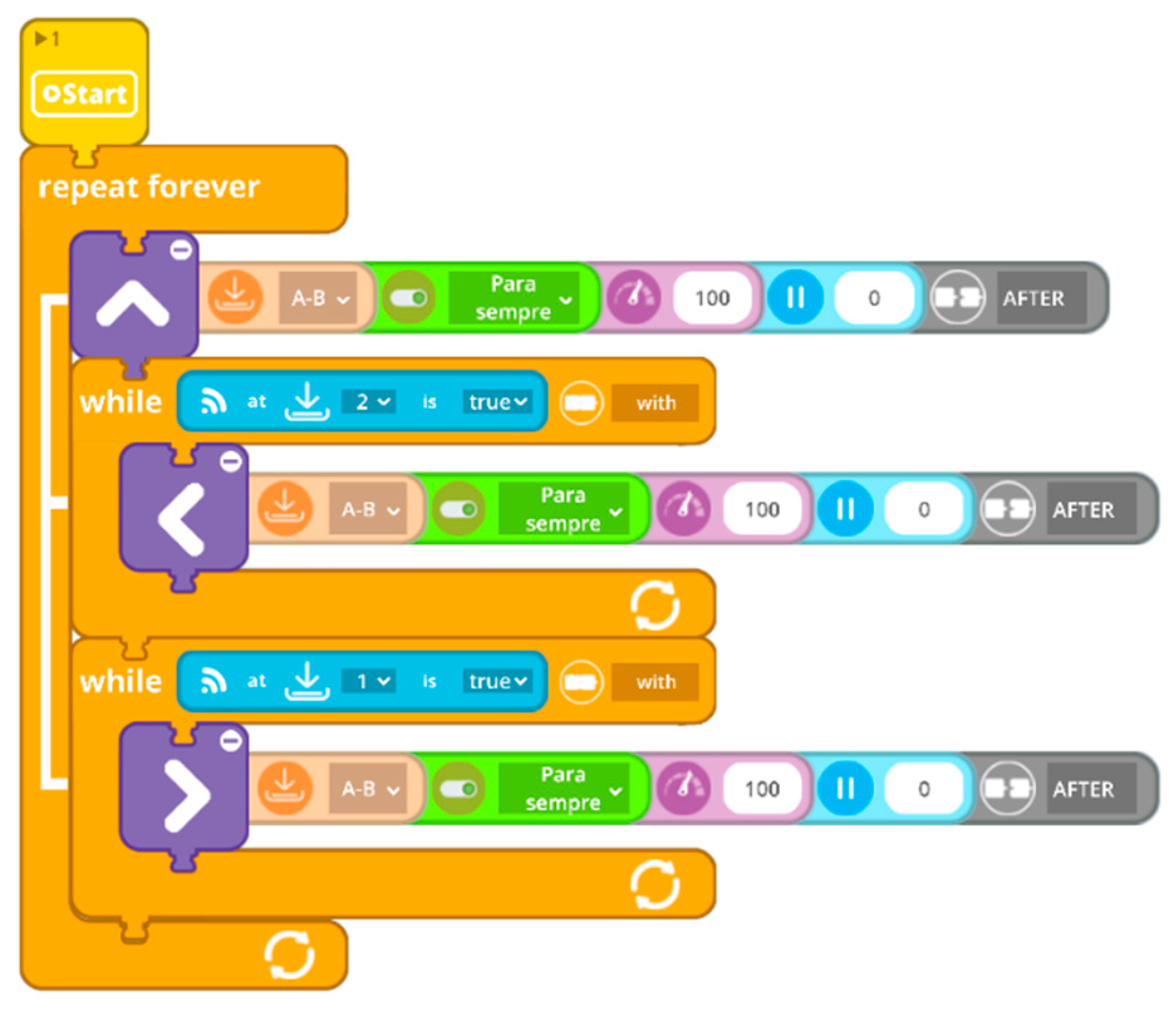
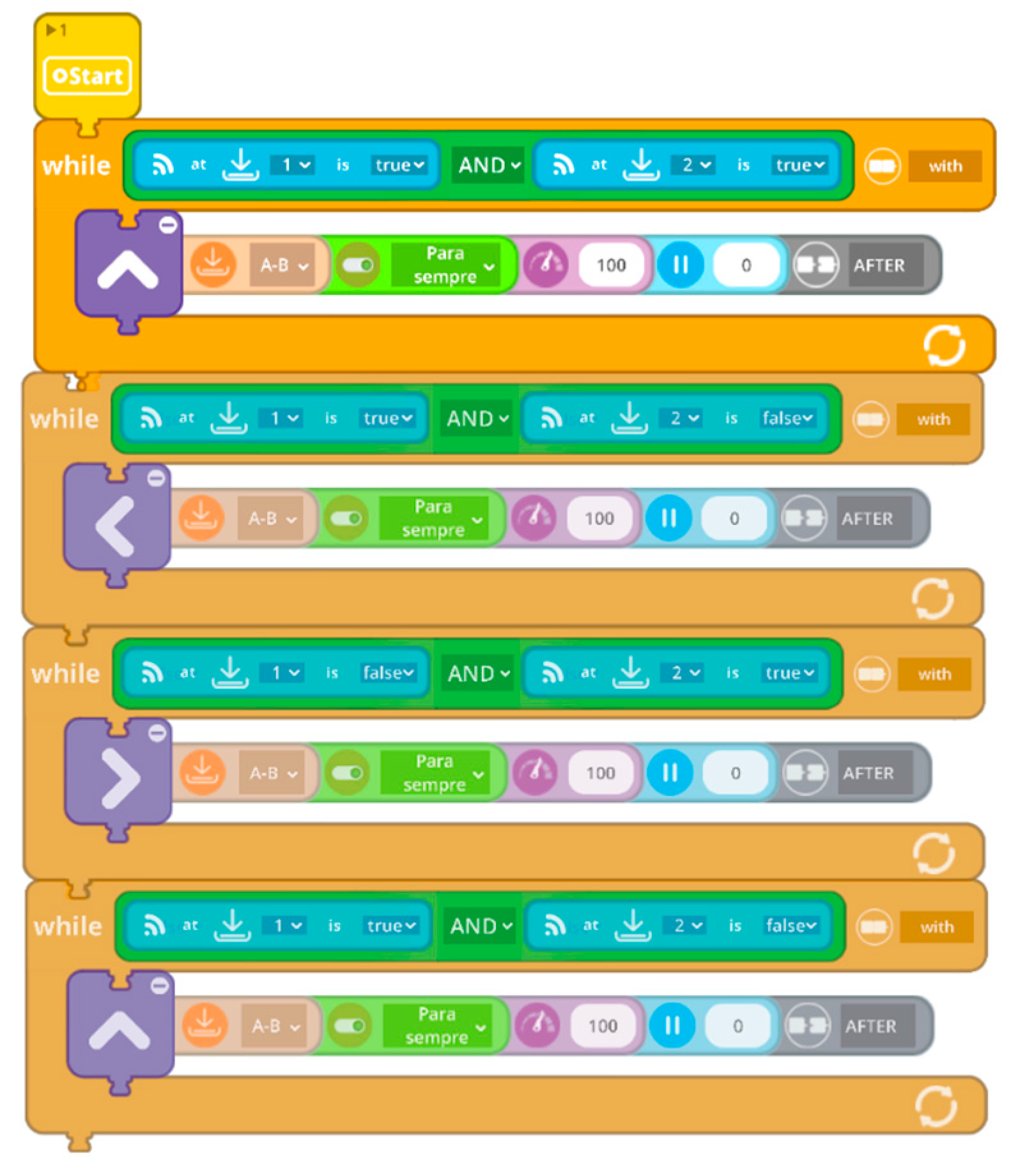
| 3. Programme the robot to run the track without hitting the limits and test your algorithm in the Simulator. | Create a recursive algorithm that allows the robot to act autonomously according to the information received from the sensors; to experience the process of debugging, optimization of algorithms, and segmentation of problems into parts, simplifying their resolution. | |
| Task | Students’ Performance | Students’ Difficulties | Amendments to the Exploration Guide | Changes in Teachers’ Actions | |
|---|---|---|---|---|---|
| Identified During the Intervention | Identified During Data Analysis | ||||
| Introductory task | Completed the task | Not all students had the exploration guide with them, which was corrected in the next intervention cycle. | None | None | |
| 1 | Completed the task without difficulty | Export the created code, validating the solution of the task. | None | Oral instructions during the introductory task and demonstration on how to export the codes in screenshot format. | |
| 2 | Completed the task without difficulty | Export the created code, validating the solution of the task. Exit the EnViRo tab and return to the programming environment. | Correction to the statement in Task 2.2, adding another image of the work environment and more details to the instructions for opening tabs. | None | |
| 3 | Only solved Task 3 | There was no time to solve Task 3.2. | Task 3.1 was eliminated. | None | |
| Task | Students’ Performance | Students’ Difficulties | Amendments Made to the Exploration Guide | Changes in Teachers’ Actions | |
|---|---|---|---|---|---|
| Identified During the Intervention | Identified During Data Analysis | ||||
| Introductory task | Completed the task | None. | None | None | None |
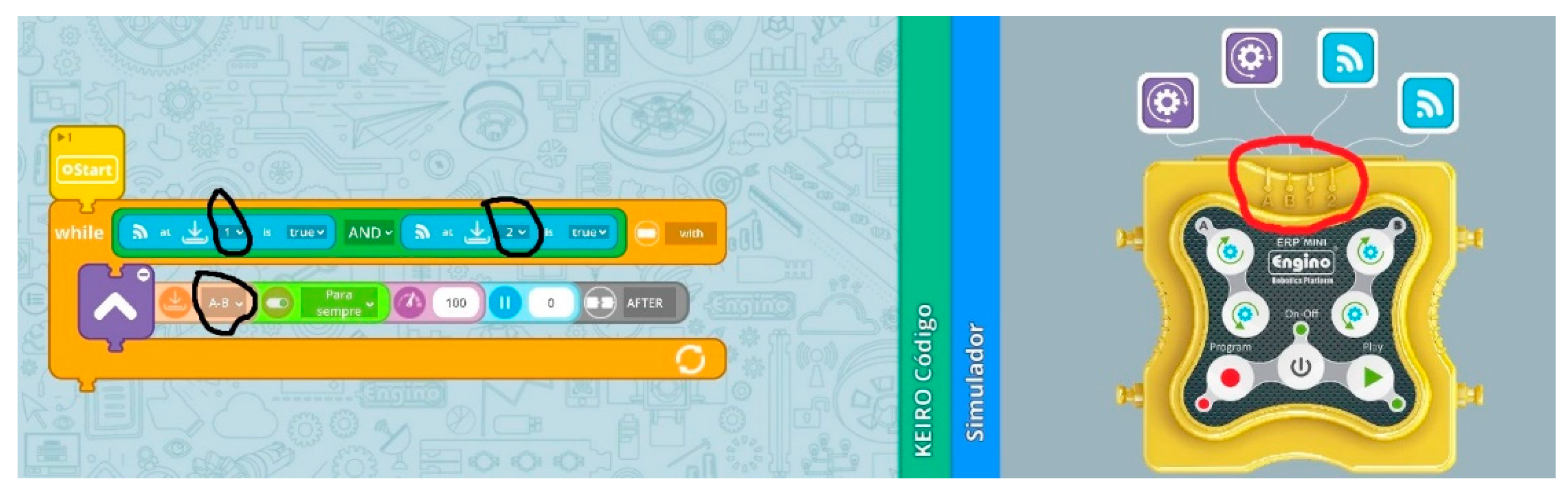
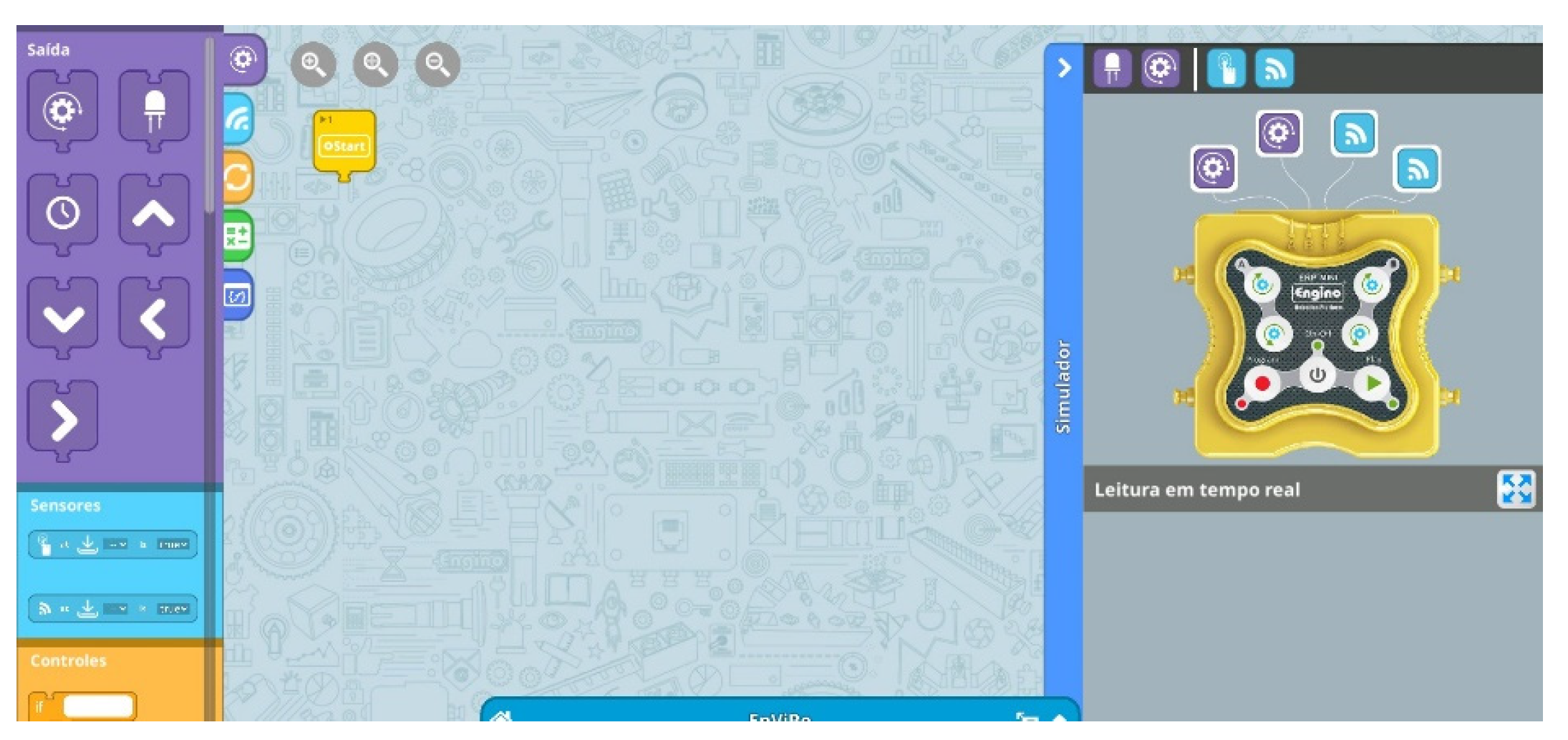
| 1 | Completed the task without difficulty | Manipulation of the display options in the EnViRo tab. | Relate ports A and B to their function in the code blocks. | None | Indications for demonstrating manipulation in the introductory task, and monitoring this difficulty in group follow-up. |
| 2 | Completed the task without difficulty in programming | Relate correctly the information returned by the sensors to the robot programming. | Include an indication in the phrasing to activate Text Feedback | Prompts to ask students during task monitoring whether the information returned by the sensors should be included in the written answer. | |
| 3 | Only one group was able to solve the task | Relate correctly the information returned by the sensors to the programming. | None. | Indications to ensure during monitoring that students understand the relationship between the information returned by the sensors and programming for the required change of direction. | |
| Placement | Indications to the Teacher |
|---|---|
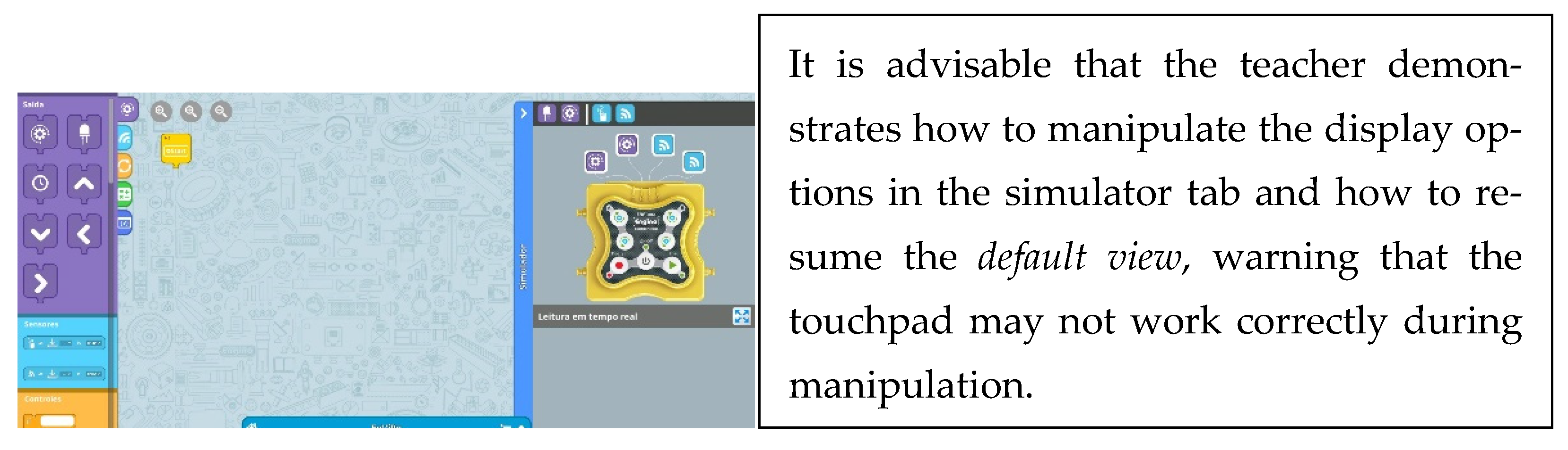
| Next to Figure A8 | Demonstrate how to manipulate the robot’s display options. |
| Next to Figure A9 | Demonstrate how to export an algorithm. |
| After Task 1.1 | Explain how the rooms created for each group work and ask students to manipulate the simulator; make suggestions that allow students to relate the indications given to the servo motor to the movement of the robot; suggest that the students think about how they would solve the problem with their body, hoping that they can transpose the solution into the robot’s programming. |
| After Task 1.2 | Challenge the students to look for solutions that include different movements, creating conditions to facilitate the solving of the next task. |
| After Task 1.3 | Suggest that students think about the movement of their body to understand that rotation does not imply displacement; ensure that they relate the operation of the different ports to the code blocks for moving the robot. |
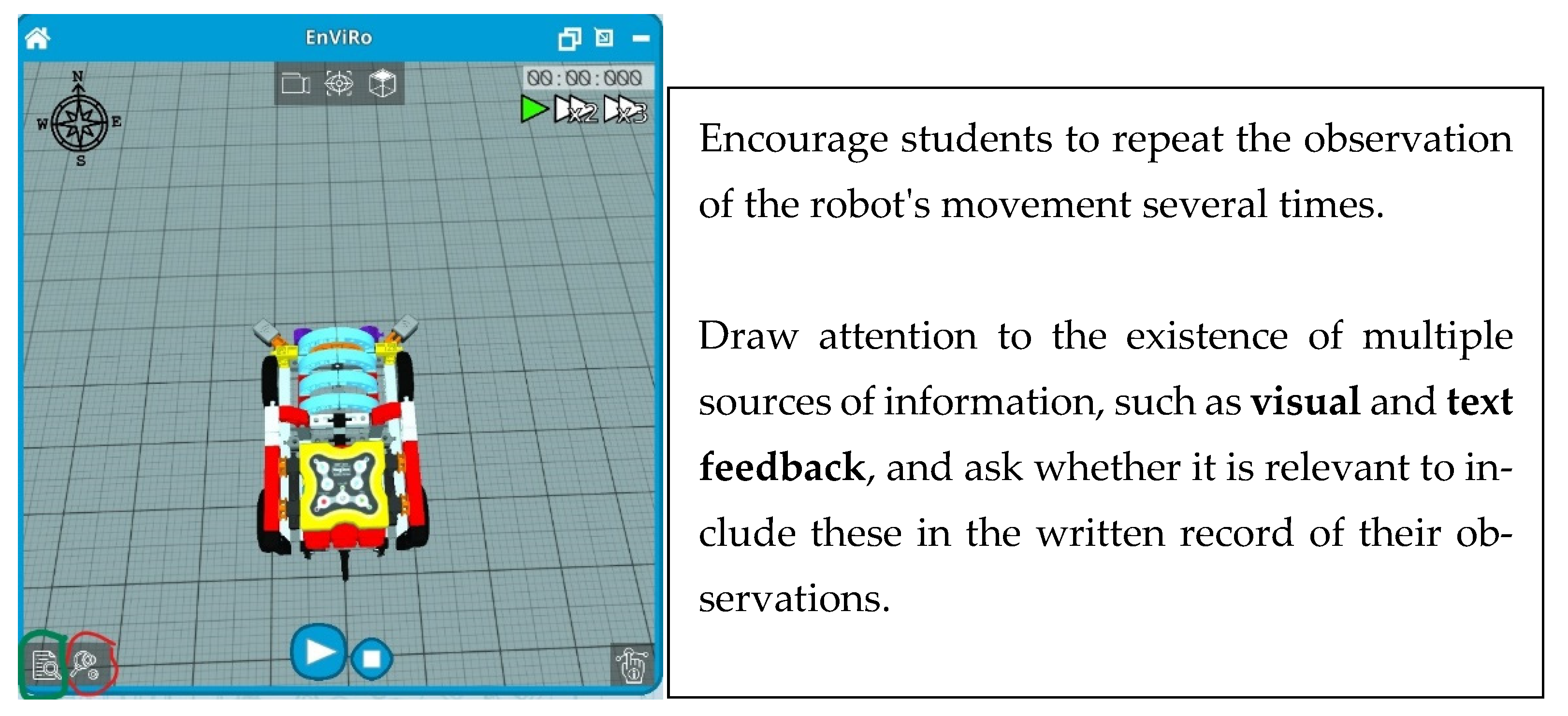
| Next to Figure A10 | Encourage students to repeatedly observe the movements of the robot and make them aware that there are several sources of feedback from the robot. |
| After Task 2.2.2 | Suggest that they think about how they would solve the problem with their body, hopefully figuring out that the robot needs to swerve when it “sees” an obstacle; suggest that they use the information returned by the sensors, just as they do with a car’s parking sensors; ensure that they correctly relate the positioning of each sensor and information returned to the direction the robot should take to avoid the obstacle. |
| After Task 3.3 | Suggest that they try to write the solution in plain language and then try to translate it into an algorithm that allows the robot to travel along the track without hitting the side limiters; if difficulties persist, suggest they try to remember what they have learned about Scratch and, in particular, the function of the loop blocks. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Silva, R.; Martins, F.; Cravino, J.; Martins, P.; Costa, C.; Lopes, J.B. Using Educational Robotics in Pre-Service Teacher Training: Orchestration between an Exploration Guide and Teacher Role. Educ. Sci. 2023, 13, 210. https://doi.org/10.3390/educsci13020210
Silva R, Martins F, Cravino J, Martins P, Costa C, Lopes JB. Using Educational Robotics in Pre-Service Teacher Training: Orchestration between an Exploration Guide and Teacher Role. Education Sciences. 2023; 13(2):210. https://doi.org/10.3390/educsci13020210
Chicago/Turabian StyleSilva, Ricardo, Fernando Martins, José Cravino, Paulo Martins, Cecília Costa, and J. Bernardino Lopes. 2023. "Using Educational Robotics in Pre-Service Teacher Training: Orchestration between an Exploration Guide and Teacher Role" Education Sciences 13, no. 2: 210. https://doi.org/10.3390/educsci13020210
APA StyleSilva, R., Martins, F., Cravino, J., Martins, P., Costa, C., & Lopes, J. B. (2023). Using Educational Robotics in Pre-Service Teacher Training: Orchestration between an Exploration Guide and Teacher Role. Education Sciences, 13(2), 210. https://doi.org/10.3390/educsci13020210