Comparative Analysis of Real-Time Fall Detection Using Fuzzy Logic Web Services and Machine Learning




Abstract
1. Introduction
- A comprehensive study on the performance of various fall detection machine learning techniques to detect a fall.
- To analyse the performance of online and offline fall detection techniques. Specifically, Fuzzy-as-a-service utilises an online real-time approach and machine learning as an offline approach.
- To evaluate the efficiency of using fuzzy versus non-fuzzy approaches in wearable sensors-based real-time applications.
2. Review of Related Literature
- (a)
- Wearable devices: Herein, a subject is required to wear a device or a sensor embedded in his/her garment to track his/her posture and motion. Sensor data that is collected is used as motion signals to analyse different body movements [12,13]. A specific threshold-based sensor is used that triggers an alarm whenever the output of the sensor reaches a specific threshold. Recently, motion-based sensors have been integrated with commercially based smartphones [14]. The advantage of using such sensors is that they provide flexibility and portability; however, their false alarm rate is high.
- (b)
- Ambient Sensors: Using various sensors to record human-related data whenever a subject is in close proximity. The main idea is to identify changes in posture from standing to lying down whenever a fall occurs. The limitation of this type of sensor is that accuracy detection is limited, it is cost inefficient and false alarm occurrence is high.
- (c)
- Vision-based sensors: An indoor camera is used to monitor a single subject’s movement. A variety of video-processing algorithms use fall characteristics to determine a fall occurrence such as Verso Vision. The limitation of this type of sensor is that they are immovable, and a subject is confined to a region covered by a camera.
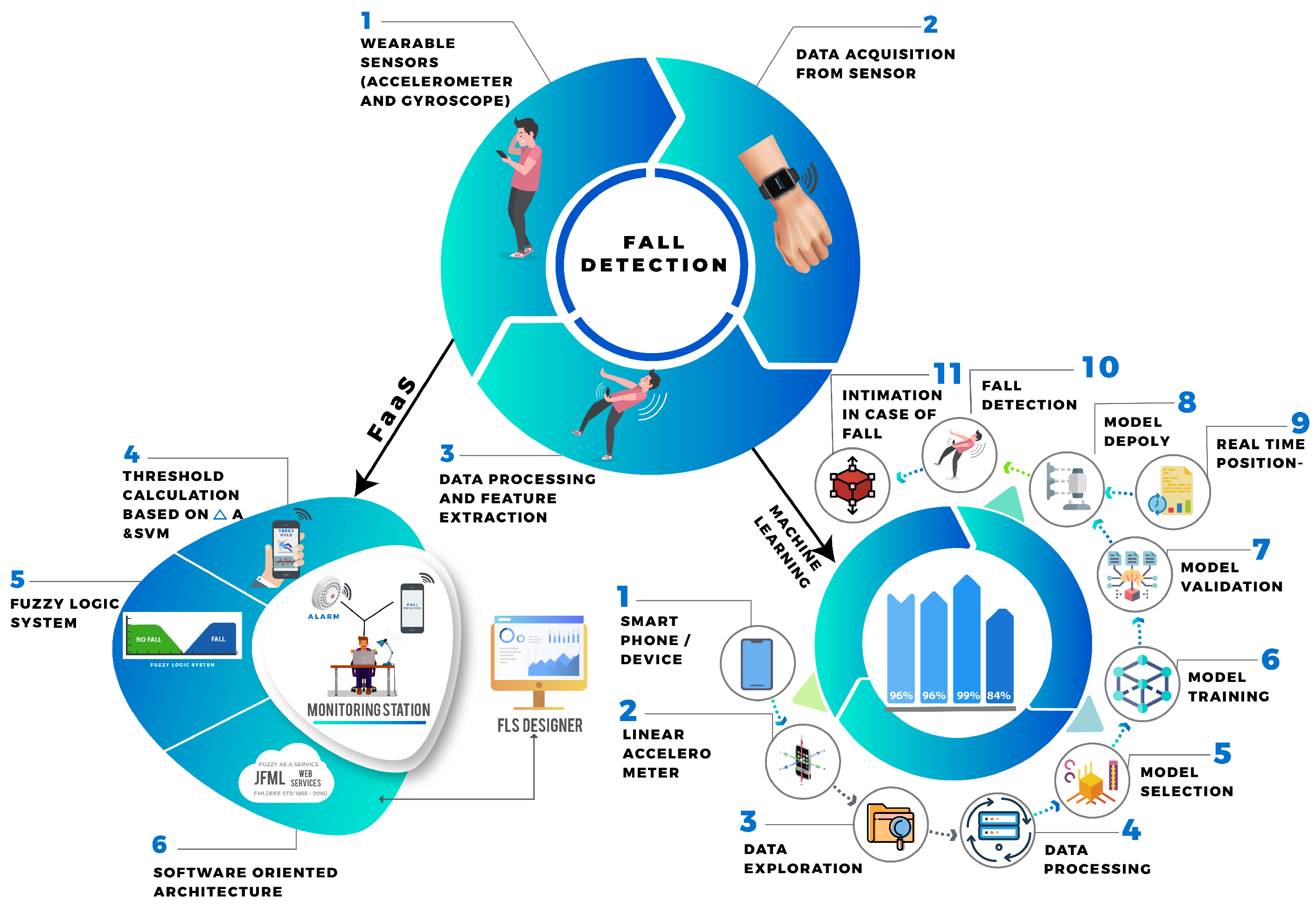
3. Proposed System
3.1. Fuzzy Logic System
- (a)
- Fuzzify each input values as a function of fuzzy membership: Implement every necessary law to quantify the fuzzy output functions. To get “crisp” performance values, de-fuzzify the blurry output functions.
- (b)
- Fuzzy input set: SVM is the first input that contains three values, i.e., low, medium and high.
- (c)
- Compounding: Set a minimum angle, leading to a 45° fall, and see it as a medium angle. The lower and extreme angles are 20° and 90° respectively. The size of all 0° to 180° memberships were calculated by the minimum and maximum angles that the sensor may calculate. In that basis, if the angle is >45°, then the accident is more likely to be called a collision.
- (d)
- Rule base: To perform this experiment, a total of nine rules were created for identifying whether it is a fall or not.
- (e)
- De-fuzzification: It is one of the main phases in the method that uses fuzzy logic to transform a fuzzy output set into a crisp value. As the input given to the system includes three values, i.e., low, medium and high, the output of the system offered three values, i.e., low, medium and high [10].
3.2. Methodology Using Fuzzy Logic Web Services
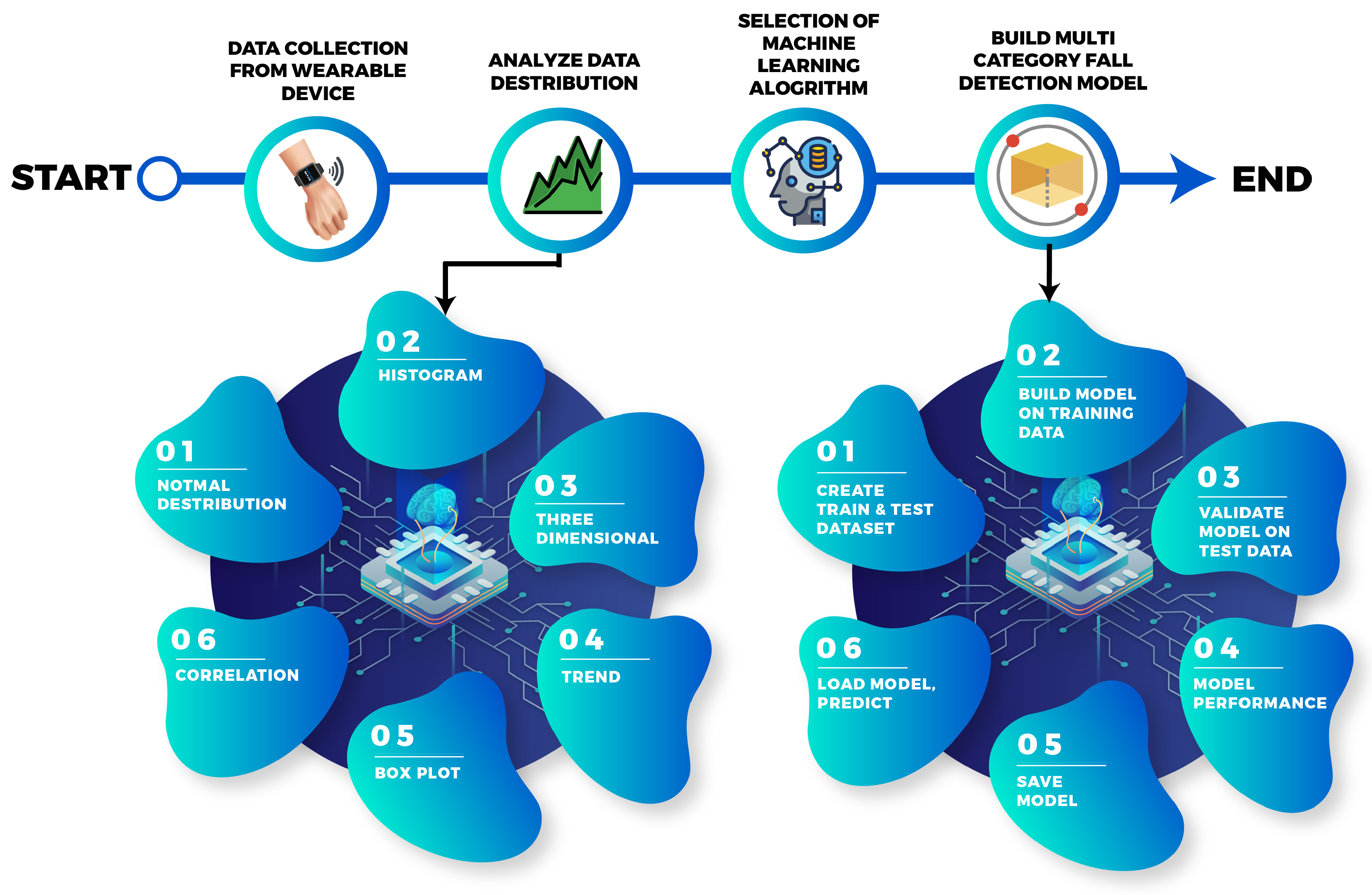
3.3. Modelling Approach Using Machine Learning Techniques
- (1)
- k-NN: Each object is graded by a majority vote of its neighbors, and the entity being allocated to the most common class of its nearest k neighbors. The purpose of considering k-NN model is because the nearby linear accelerometer or gyroscope sensor data points may form a specific pattern, which can be used to identify a fall or non-fall.
- (2)
- Decision tree classifier: In decision tree classification, branches represent independent variables and leaves represent class variables. The purpose of using decision tree classifier was to validate the effect of decision tree learning for prediction of a fall and non-fall.
- (3)
- Random forest classifier: It is a classification method for learning an ensemble. It is a set of decision trees from a randomly chosen training subset. It predicts the final class by aggregating the votes from various trees for decisions.
- (4)
- Extreme gradient boosting: is also an ensemble learning method and a decision tree-based algorithm where gradient descent optimization is used for minimizing errors to optimize parallel processing, tree pruning and the model’s over-fitting.
- -
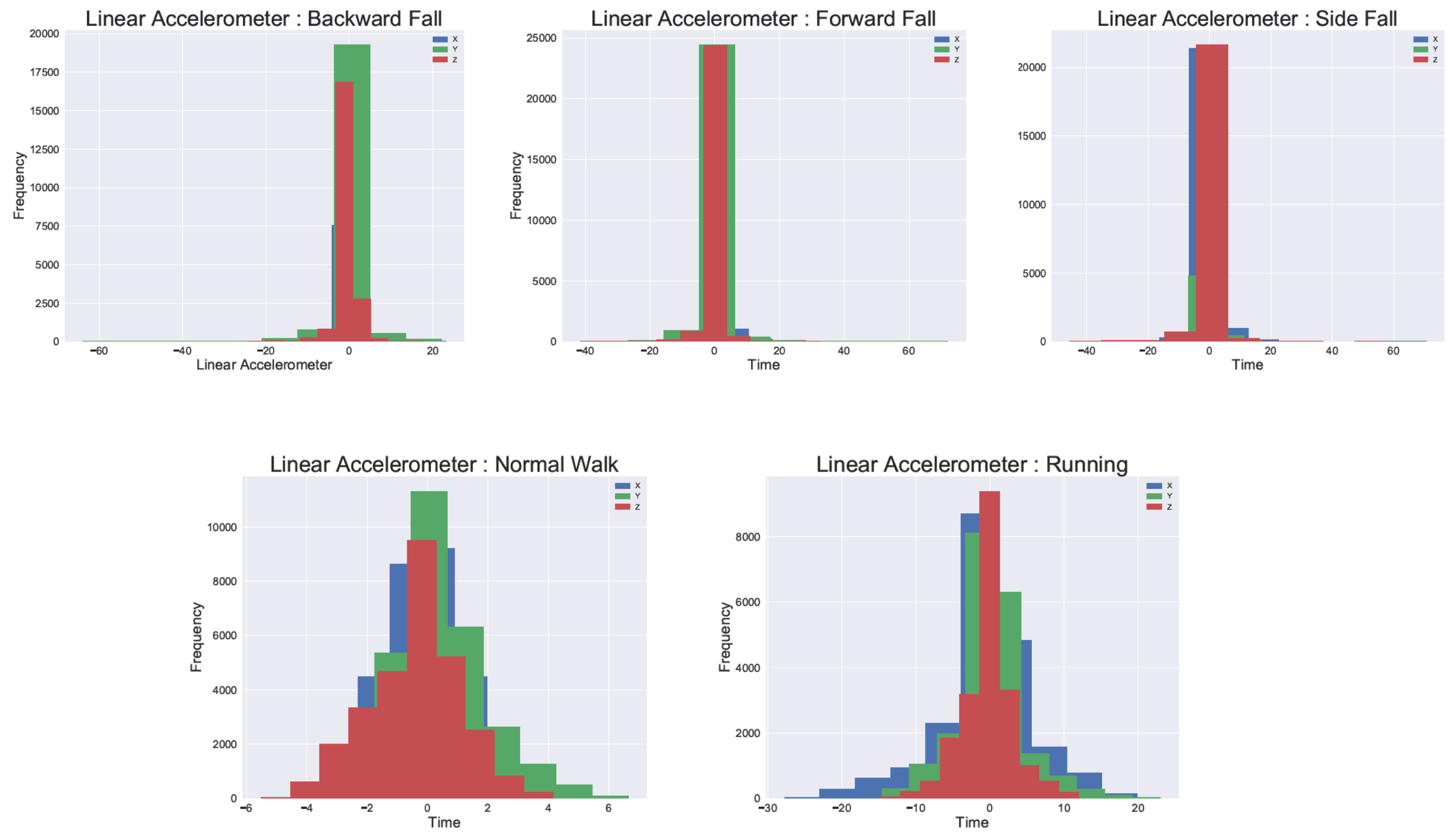
- Input Layer: It has the same dimension as of input data. In our case, we have in total 6 features where 3 features represent linear accelerometer and the remaining 3 features represent the gyroscope data.
- -
- Hidden Layer: There are 2 hidden layers, each having 600 neurons. Rectified Linear Unit (ReLU) is used as a non-linear activation function.
- -
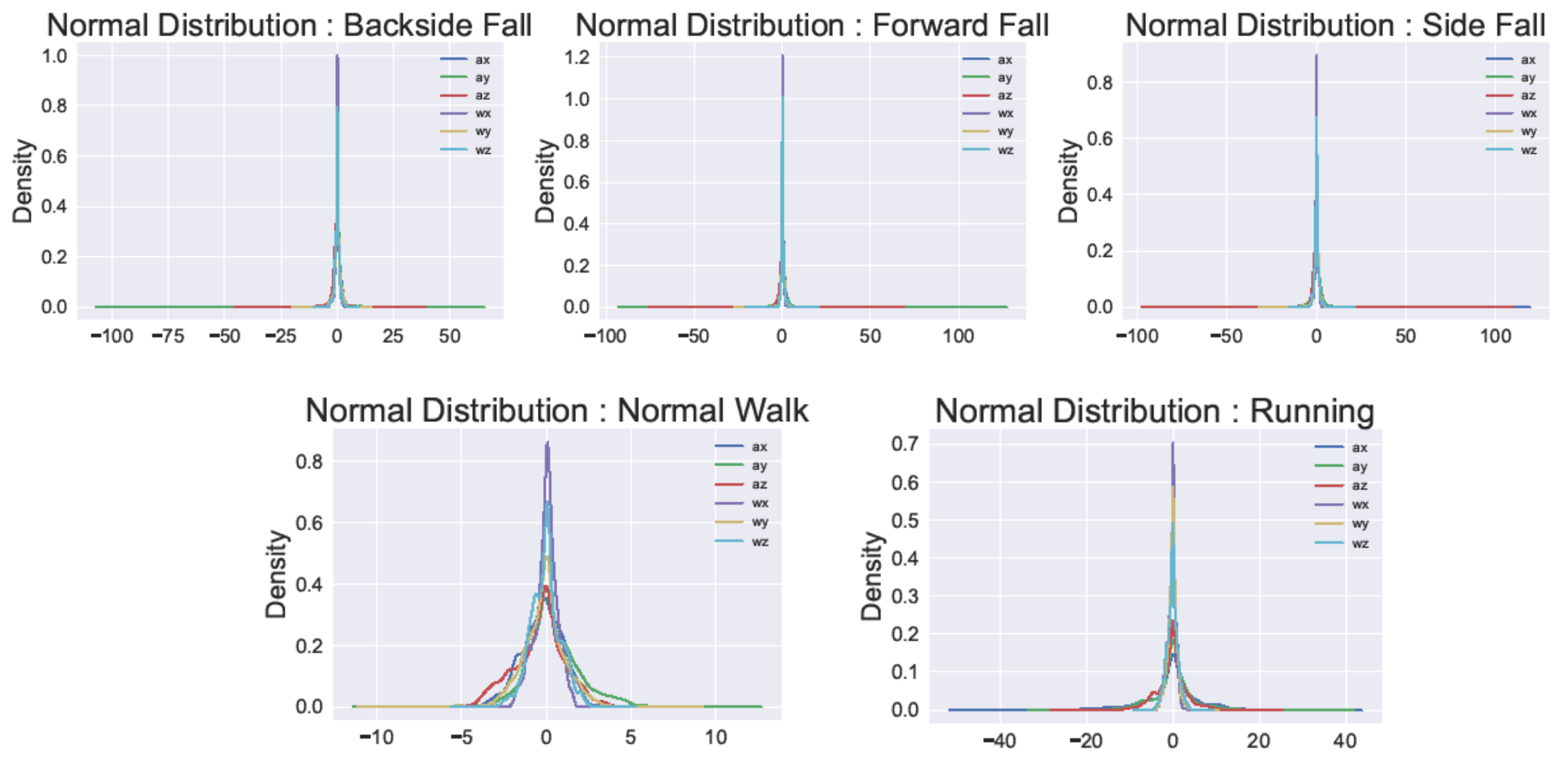
- Output Layer: As this is a multi-class classification problem and here we are aiming to predict 5 classes (backside fall, forward fall, side fall, normal walk, running), there will be 5 neurons in the output layer. Each neuron represent one class and at the end whichever neuron gets the highest probability, will be the final prediction.
4. Results and Discussion
5. Conclusions and Future Scope
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ADL | Activity Of Daily Living |
| ANN | Artificial Neural Network |
| FLS | Fuzzy Logic System |
| FML | Fuzzy Markup Language |
| ML | Machine Learning |
| PERS | Personal Emergency Response System |
| ReLU | Rectified Linear Unit |
References
- Griffiths, C.; Rooney, C.; Brock, A. Leading causes of death in England and Wales–how should we group causes. Health Stat. Q 2005, 28, 6–17. [Google Scholar]
- World Health Organization; World Health Organization. Ageing; Life Course Unit. WHO Global Report on Falls Prevention in Older Age; World Health Organization: Geneva, Switzerland, 2008. [Google Scholar]
- Igual, R.; Medrano, C.; Plaza, I. Challenges, issues and trends in fall detection systems. Biomed. Eng. Online 2013, 12, 66. [Google Scholar] [CrossRef] [PubMed]
- Medrano, C.; Plaza, I.; Igual, R.; Sánchez, Á.; Castro, M. The effect of personalization on smartphone-based fall detectors. Sensors 2016, 16, 117. [Google Scholar] [CrossRef]
- Fleming, J.; Brayne, C. Inability to get up after falling, subsequent time on floor, and summoning help: Prospective cohort study in people over 90. BMJ 2008, 337, a2227. [Google Scholar] [CrossRef] [PubMed]
- Kunkel, D.; Pickering, R.M.; Ashburn, A.M. Comparison of retrospective interviews and prospective diaries to facilitate fall reports among people with stroke. Age Ageing 2011, 40, 277–280. [Google Scholar] [CrossRef] [PubMed]
- Mubashir, M.; Shao, L.; Seed, L. A survey on fall detection: Principles and approaches. Neurocomputing 2013, 100, 144–152. [Google Scholar] [CrossRef]
- He, J.; Bai, S.; Wang, X. An unobtrusive fall detection and alerting system based on Kalman filter and Bayes network classifier. Sensors 2017, 17, 1393. [Google Scholar] [CrossRef]
- Pandya, B.; Pourabdollah, A.; Lotfi, A. Fuzzy-as-a-Service for Real-Time Human Activity Recognition Using IEEE 1855–2016 Standard. In Proceedings of the International Conference on Fuzzy Systems, Glasgow, UK, 19–24 July 2020. submitted. [Google Scholar]
- Pandya, B.; Pourabdollah, A.; Lotfi, A. Fuzzy logic web services for real-time fall detection using wearable accelerometer and gyroscope sensors. In Proceedings of the 13th ACM International Conference on PErvasive Technologies Related to Assistive Environments, Corfu, Greece, 30 June–6 July 2020; pp. 1–7. [Google Scholar]
- Yu, X. Approaches and principles of fall detection for elderly and patient. In Proceedings of the HealthCom 2008-10th International Conference on e-health Networking, Applications and Services, Singapore, 7–9 July 2008; pp. 42–47. [Google Scholar]
- Nyan, M.; Tay, F.E.; Murugasu, E. A wearable system for pre-impact fall detection. J. Biomech. 2008, 41, 3475–3481. [Google Scholar] [CrossRef] [PubMed]
- Tong, L.; Chen, W.; Song, Q.; Ge, Y. A research on automatic human fall detection method based on wearable inertial force information acquisition system. In Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guilin, China, 19–23 December 2009; pp. 949–953. [Google Scholar]
- Casilari, E.; Oviedo-Jiménez, M.A. Automatic fall detection system based on the combined use of a smartphone and a smartwatch. PLoS ONE 2015, 10, e0140929. [Google Scholar] [CrossRef] [PubMed]
- Lai, C.F.; Chang, S.Y.; Chao, H.C.; Huang, Y.M. Detection of cognitive injured body region using multiple triaxial accelerometers for elderly falling. IEEE Sens. J. 2010, 11, 763–770. [Google Scholar] [CrossRef]
- Huynh, Q.T.; Nguyen, U.D.; Irazabal, L.B.; Ghassemian, N.; Tran, B.Q. Optimization of an accelerometer and gyroscope-based fall detection algorithm. J. Sens. 2015. [Google Scholar] [CrossRef]
- Huynh, Q.T.; Nguyen, U.D.; Tran, S.V.; Nabili, A.; Tran, B.Q. Fall detection system using combination accelerometer and gyroscope. In Proceedings of the Second International l Conference on Advances in Electronic Devices and Circuits (EDC 2013), Kuala Lumpur, Malaysia, 6–7 June 2013. [Google Scholar] [CrossRef]
- Auvinet, E.; Multon, F.; Saint-Arnaud, A.; Rousseau, J.; Meunier, J. Fall detection with multiple cameras: An occlusion-resistant method based on 3-d silhouette vertical distribution. IEEE Trans. Inf. Technol. Biomed. 2010, 15, 290–300. [Google Scholar] [CrossRef] [PubMed]
- Auvinet, E.; Reveret, L.; St-Arnaud, A.; Rousseau, J.; Meunier, J. Fall detection using multiple cameras. In Proceedings of the 2008 30th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Vancouver, BC, Canada, 20–24 August 2008; pp. 2554–2557. [Google Scholar] [CrossRef]
- Tong, L.; Song, Q.; Ge, Y.; Liu, M. HMM-based human fall detection and prediction method using tri-axial accelerometer. IEEE Sens. J. 2013, 13, 1849–1856. [Google Scholar] [CrossRef]
- Cao, H.; Wu, S.; Zhou, Z.; Lin, C.C.; Yang, C.Y.; Lee, S.T.; Wu, C.T. A fall detection method based on acceleration data and hidden Markov model. In Proceedings of the 2016 IEEE International Conference on Signal and Image Processing (ICSIP), Beijing, China, 13–15 August 2016; pp. 684–689. [Google Scholar] [CrossRef]
- Pierleoni, P.; Pernini, L.; Belli, A.; Palma, L.; Valenti, S.; Paniccia, M. SVM-based fall detection method for elderly people using Android low-cost smartphones. In Proceedings of the 2015 IEEE sensors applications symposium (SAS), Zadar, Croatia, 13–15 April 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Aguiar, B.; Rocha, T.; Silva, J.; Sousa, I. Accelerometer-based fall detection for smartphones. In Proceedings of the 2014 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Lisbon, Portugal, 11–12 June 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Yodpijit, N.; Sittiwanchai, T.; Jongprasithporn, M. The development of Artificial Neural Networks (ANN) for falls detection. In Proceedings of the 2017 3rd International Conference on Control, Automation and Robotics (ICCAR), Nagoya, Japan, 22–24 April 2017; pp. 547–550. [Google Scholar] [CrossRef]
- Guo, H.W.; Hsieh, Y.T.; Huang, Y.S.; Chien, J.C.; Haraikawa, K.; Shieh, J.S. A threshold-based algorithm of fall detection using a wearable device with tri-axial accelerometer and gyroscope. In Proceedings of the 2015 International Conference on Intelligent Informatics and Biomedical Sciences (ICIIBMS), Okinawa, Japan, 28–30 November 2015; pp. 54–57. [Google Scholar] [CrossRef]
- Bourke, A.K.; Lyons, G.M. A threshold-based fall-detection algorithm using a bi-axial gyroscope sensor. Med. Eng. Phys. 2008, 30, 84–90. [Google Scholar] [CrossRef] [PubMed]
- Acampora, G.; Di Stefano, B.; Vitiello, A. IEEE 1855™: The First IEEE Standard Sponsored by IEEE Computational Intelligence Society [Society Briefs]. IEEE Comput. Intell. Mag. 2016, 11, 4–6. [Google Scholar] [CrossRef]
- Soto-Hidalgo, J.M.; Alonso, J.M.; Acampora, G.; Alcalá-Fdez, J. JFML: A java library to design fuzzy logic systems according to the IEEE std 1855-2016. IEEE Access 2018, 6, 54952–54964. [Google Scholar] [CrossRef]
- Arcos, F.J.; Soto-Hidalgo, J.M.; Vitiello, A.; Acampora, G.; Alcalá-Fdez, J. Interoperability for Embedded Systems in JFML Software: An Arduino-based implementation. In Proceedings of the 2018 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Rio de Janeiro, Brazil, 8–13 July 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Alcalá-Fdez, J.; Alonso, J.M.; Castiello, C.; Mencar, C.; Soto-Hidalgo, J.M. Py4JFML: A Python wrapper for using the IEEE Std 1855-2016 through JFML. In Proceedings of the 2019 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), New Orleans, LA, USA, 18–21 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Pias, T.S.; Eisenberg, D.; Islam, M.A. Vehicle Recognition Via Sensor Data From Smart Devices. In Proceedings of the 2019 IEEE Eurasia Conference on IOT, Communication and Engineering (ECICE), Yunlin, Taiwan, 3–6 October 2019; pp. 96–99. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technique | Sub-Category | Ref. | Year | Sensor Type | Performance | ||
|---|---|---|---|---|---|---|---|
| Accuracy | Sensitivity | Specificity | |||||
| Wearable-based | Attached to the body | [15] | 2011 | Multiple tri-axial accelerometers | – | – | – |
| [16] | 2015 | Accelerometer and gyroscope | – | 96.3% | 96.2% | ||
| [17] | 2013 | Accelerometer and gyroscope | 99.38% | 100% | 99.38% | ||
| Mobile phone-based | [18] | 2011 | Multiple cameras | – | 99.7% | 99.7% | |
| [19] | 2008 | Multiple cameras | 100% | – | – | ||
| Classification algorithm-based | Machine learning | [20] | 2013 | Tri-axial accelerometer | 100% | 100% | 100% |
| [21] | 2016 | Tri-axial accelerometer | 97.2% | 91.7% | 100% | ||
| [22] | 2015 | Accelerometer and magnetometer | 97.7% | 99.3% | 96% | ||
| [23] | 2014 | Accelerometer | 97.5% | 97% | 99% | ||
| [24] | 2017 | Accelerometer and gyroscope | 99.23% | 99% | 99.37% | ||
| Threshold | [23] | 2014 | Accelerometer and gyroscope | 93.3% | – | – | |
| [25] | 2015 | Tri-axial accelerometer and gyroscope | – | – | 100% | ||
| [16] | 2015 | Thri-axis accelerometer and gyroscope | 90% | 96.3% | 96.2% | ||
| [26] | 2006 | Bi-axial gyroscope | 100% | 100% | 100% | ||
| [17] | 2013 | Accelerometer and gyroscope | 99.38% | 100% | 99.38% | ||
| EPOCH | Training Accuracy (%) | Training Loss | Testing Accuracy (%) | Testing Loss | Time (s) |
|---|---|---|---|---|---|
| 1 | 48.96% | 1.2248 | 60.04% | 0.9999 | 63 |
| 2 | 65.81% | 0.8732 | 71.47% | 0.7354 | 64 |
| 3 | 74.47% | 0.6733 | 75.74% | 0.6421 | 69 |
| 4 | 79.51% | 0.5595 | 79.81% | 0.5469 | 69 |
| 5 | 82.63% | 0.4776 | 82.66% | 0.4945 | 69 |
| 6 | 84.78% | 0.429 | 83.92% | 0.4504 | 71 |
| 7 | 86.45% | 0.3886 | 86.10% | 0.3956 | 70 |
| 8 | 87.70% | 0.3595 | 88.22% | 0.3526 | 70 |
| 9 | 88.62% | 0.3411 | 87.41% | 0.3768 | 69 |
| 10 | 89.56% | 0.3181 | 88.38% | 0.3335 | 69 |
| 11 | 90.18% | 0.3037 | 89.44% | 0.3251 | 70 |
| 12 | 90.61% | 0.2918 | 90.94% | 0.2795 | 72 |
| 13 | 91.22% | 0.2834 | 90.15% | 0.3195 | 68 |
| 14 | 91.51% | 0.2815 | 91.33% | 0.2997 | 71 |
| 15 | 91.81% | 0.2772 | 91.12% | 0.3189 | 69 |
| 16 | 92.30% | 0.2616 | 91.28% | 0.2996 | 72 |
| 17 | 92.67% | 0.2511 | 91.96% | 0.2839 | 69 |
| 18 | 92.88% | 0.2447 | 91.30% | 0.3092 | 70 |
| 19 | 92.98% | 0.2472 | 92.01% | 0.2851 | 71 |
| 20 | 93.28% | 0.2386 | 92.82% | 0.2514 | 71 |
| Predicted Condition | Results | ||
|---|---|---|---|
| TP | 16 | TP + FN | 18 |
| FN | 02 | ||
| TN | 11 | TN + FP | 12 |
| FP | 01 | ||
| Sensitivity | 88.89% | Specificity | 91.67% |
| Accuracy | 90% | ||
| Model Selection | ||
|---|---|---|
| Algorithm | Average Accuracy | Standard Deviation |
| KNN | 96.85% | 0.20% |
| Decision Tree classifier | 96.18% | 0.14% |
| Random Forest | 99.19% | 0.10% |
| XGBoost | 84.18% | 0.53% |
| Random Forest | |||||||
|---|---|---|---|---|---|---|---|
| No | Action | TP | TN | FP | FN | Sensitivity | Specificity |
| 1 | Backside Fall | 5645 | 23,482 | 45 | 24 | 99.25% | 99.48% |
| 2 | Forward Fall | 5678 | 23,408 | 45 | 65 | 97.99% | 99.43% |
| 3 | Side Fall | 6003 | 23,114 | 33 | 46 | 98.33% | 99.73% |
| 4 | Normal Walk | 5866 | 23,270 | 39 | 21 | 98.94% | 99.74% |
| 5 | Running | 5806 | 23,312 | 36 | 42 | 98.13% | 99.76% |
| - | Average | 5799.6 | 23,317.2 | 39.6 | 39.6 | 98.53% | 99.63% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pandya, B.; Pourabdollah, A.; Lotfi, A. Comparative Analysis of Real-Time Fall Detection Using Fuzzy Logic Web Services and Machine Learning. Technologies 2020, 8, 74. https://doi.org/10.3390/technologies8040074
Pandya B, Pourabdollah A, Lotfi A. Comparative Analysis of Real-Time Fall Detection Using Fuzzy Logic Web Services and Machine Learning. Technologies. 2020; 8(4):74. https://doi.org/10.3390/technologies8040074
Chicago/Turabian StylePandya, Bhavesh, Amir Pourabdollah, and Ahmad Lotfi. 2020. "Comparative Analysis of Real-Time Fall Detection Using Fuzzy Logic Web Services and Machine Learning" Technologies 8, no. 4: 74. https://doi.org/10.3390/technologies8040074
APA StylePandya, B., Pourabdollah, A., & Lotfi, A. (2020). Comparative Analysis of Real-Time Fall Detection Using Fuzzy Logic Web Services and Machine Learning. Technologies, 8(4), 74. https://doi.org/10.3390/technologies8040074