1. Introduction
The importance of energy security cannot be understated with today’s global economy and the need for increased national security. For sustainable development and to reduce carbon emission renewable energy is becoming very widespread. Research and commercial implementation for harvesting electrical energy from the ambient environment has be done by different techniques, such as piezoelectric, thermoelectric and photovoltaics [
1]. Among all these solar photovoltaic (PV) is a promising technology for its high-power density, around 1000 kW/m
2. For every doubling of module shipment in terms of MWp (mega watt peak, a solar power measure in photovoltaic (PV) industry to describe a unit’s nominal power), there is 22.5% decrease in selling price [
2]. In addition, cell efficiency of solar PV systems is increasing significantly [
3,
4]. These factors make the PV system one of the most desirable and suitable choices for a renewable energy source. Traditional photovoltaic based renewable energy systems require large swaths of land be dedicated to power generation and must be first cleared of vegetation. The loss of wild habitat and the presence of the panels and human activity may have deleterious effects upon wildlife that are not yet fully understood. As a solution to this problem, it is possible to use the roadways (roadside lands and road pavements) for harvesting solar energy. Additionally, solar PV system are decentralized. Decentralized power production and microgrids are far more secure and sustainable methods of power production as compared to any centralized power source, even centralized solar arrays.
Shekhar et al. studied the economic viability of dedicated solar (roadside solar infrastructure, not solar pavements) powered light emitting diode (LED) lighting in roadways [
5]. According to their study, solar PV based systems provide 13% lower power consumption but 37% higher installation cost than current non-LED lighting. However as estimated by international technology roadmap for photovoltaic (ITRPV), when the module cost falls below 1 USD/Wp, overall installation cost will be significantly reduced [
2] There have been several practical studies done on solar-powered roadside units such as road surveillance systems, traffic signal systems etc. [
6,
7,
8,
9]. Using infrastructure integrated PV (IIPV) to power roadway loads (road surveillance systems, traffic signal systems, roadside lights etc.) will minimize grid dependence along with reduction in distribution losses and requirements for copper [
5,
10]. However, the above-mentioned roadway energy harvesting technologies (including roadside solar PV system) are mostly thermal solar and/or have low power capabilities. To meet the power need for sustainable electrification of public transport systems, large scale PV systems are needed [
11]. This will require greater land area than current infrastructure integrated PV (IIPV) systems.
Roadways are major civil structures for transportation. Transportation systems use 20–25% of the world’s total energy production and are one of the prime sources of CO
2 emission. There is increasing demand to compensate for this environmental damage. Research is ongoing to harness green energy from pavements themselves. Road surfaces absorb approximately 40 MJ/m
2 of solar radiation energy per day on average in summertime [
12,
13]. In addition to that a significant part of the energy released by vehicles is transferred to pavements mechanically. Approximately 15–21% of the energy produced by a vehicle is transferred to the vehicle’s wheels [
14,
15], which indicates a significant amount of energy released by vehicles in the form of heat is transferred to the pavements without being used. These are sources of energy, which can be converted to electricity or other forms of energy, such as thermal energy [
16,
17]. There have been several studies done on pavements as solar heat collectors [
18,
19,
20]. Piezoelectric technology has been implemented on roadways pavement to harness energy from vehicle vibration [
21,
22,
23]. Furthermore, the potential of roadway pavement- based PV system is highly recognized [
24]. Researchers from the Korea Institute of Construction Technology (KICT), investigated the possibility of harvesting solar energy by embedding solar cells in pavement infrastructure [
25]. They reported that current thin film PV cells are not suitable to be used in pavement because of premature corrosion and wear due to mechanical load and environmental conditions. This indicates the need for a new of solar cell design to overcome these problems. Northmore et al. (2012) at Waterloo University use laminated, tempered, and textured glass to strengthen solar panel to put it in pavement applications [
26].
The first implementation of PV cells in pavements (i.e., SR1) in the U.S was done by Solar Roadways
®, Incorporated (SRI) [
27]. In 2012 SRI improved the design and replaced the upper layer of the road pavement (i.e., SR2) [
27]. SRI used engineered solar panels that can support traffic loads and produce electrical energy. Each panel has area 0.37 m
2 and can produce 36 W. SRI then added LEDs to the prototype for illuminating road edge striping for improved safety while driving at night. To prevent ice/snow accumulation in winter/cold climates, SRI added a heating element (like the defrosting wire in the rear window of cars) on the surface of the module. Solar roadway “SR” can be thought of as an intelligent highway system that is equipped with microprocessor-based controller unit that can activate the LED lights and facilitate wireless communications. The upper layer of the prototype was patented in 2014 [
28]. Brusaw stated that the conversion efficiency of the overall system was 11.2% [
27].
In late 2014, a 70 m long cycling lane was covered with photovoltaic materials and opened to the public. The solar bike path generated 3000 kWh of electricity in the first six months of operation which is enough to power a single household for a year [
29]. In December 2016, a one-kilometer road covered with resin-coated solar panels was opened for traffic in the French town of Tourouvre for generating electricity [
30]. Shekhar et al. theoretically analyzed the operational challenges and performance parameters of infrastructure integrated photovoltaic (IIPV) bike paths, based on the experience of a pioneering 70-m solar bike path installed in the Netherlands [
5,
29]. They predicted that an energy yield of 85–90 kWh/m
2 can be achieved in the specific site in Netherlands, although the measured data for yield is 78 kWh/m
2 (SolaRoad, Nov. 2018). Model limitations, irradiance prediction error, unaccounted dynamic, and operational shutdown losses are expected factors for this discrepancy. With better technology such as using monocrystalline (MC) solar cells 142 kWh/m2 yields can be reached. They also concluded that this yield is location specific; for example, in Chicago, IL, USA the predicted yields are 139 and 193 kWh/m
2 for polycrystalline and mono crystalline solar cell respectively.
Dezfooli et al. tested the feasibility of solar pavements as a sustainable source of electrical energy [
31]. They tested two prototypes: one is entitled “solar panel” (solar cell embedded in rubber and Plexiglas) and other one is entitled as “solar pavements” (solar cell embedded between two porous rubber layers). Solar pavements show more than 13% higher skid resistance than solar panels both in wet and dry conditions. Placing a solar cell in a solar panel structure (between a transparent polycarbonate sheet and rubber) and solar pavement (between two rubber layers, top layer is porous) reduced power conversion efficiency (PCE) by 26% and 50% respectively in comparison with the reference cell. Adding a flexible rubber layer (solar pavement) made the system more resistant to structural failure (rutting and fatigues) while reducing the PCE value by 40%. It is worth mentioning some of the limitations of the above-mentioned works. For example, Dezfooli et al. have done flexural bending but not shear testing [
31]. They reported that their prototype solar panel can withstand only 600 kPa for 60 s. But for practical roadway application the load will be much greater. Additionally, they tested their prototypes for only a few thousand load cycles for rutting and fatigue tests whereas millions of load testing cycles are required to meet typical roadway standards.
In this study we have conducted engineering tests to evaluate the feasibility of an emerging solar pavement technology for public roads and highways. Concrete and asphalt are the primary materials used to construct roadways for motor vehicles, bike paths for pedestrians and bicyclists, and runways for aircraft. Solar Roadways®, Inc. in Sandpoint, ID, proposed a novel solar pavement technology as an alternative roadway material and sustainable energy source. SR has been performing research on solar pavement technology since 2009. “SR3” is the unique and patented third generation of their solar pavement prototype. As mentioned above, there is a scarcity of research performed on solar pavement technology for roadway applications. At this point there is no defined test methodology or framework to test the performance of this new technology. Therefore, studies on new test methodologies, test fixtures, and testing technological advancement are critically needed. Solar Roadways®, Inc performed load testing, traction testing, and impact resistance testing to use their prototype in some non-critical applications such as driveways, parking lots, sidewalks, bike paths, etc. To use the prototype on public roads civil engineering testing is needed such as freeze/thaw cycling, moisture conditioning, heavy vehicle loading and shear testing. This study is a continuation of the research of Solar Roadways Solar Roadways®, Inc (SR). Combined with SR’s previous tests, this paper will give a framework (design of the test fixture and testing methodology) for engineering tests on solar pavement technologies. The purpose of the four engineering tests performed in this study are summarized below:
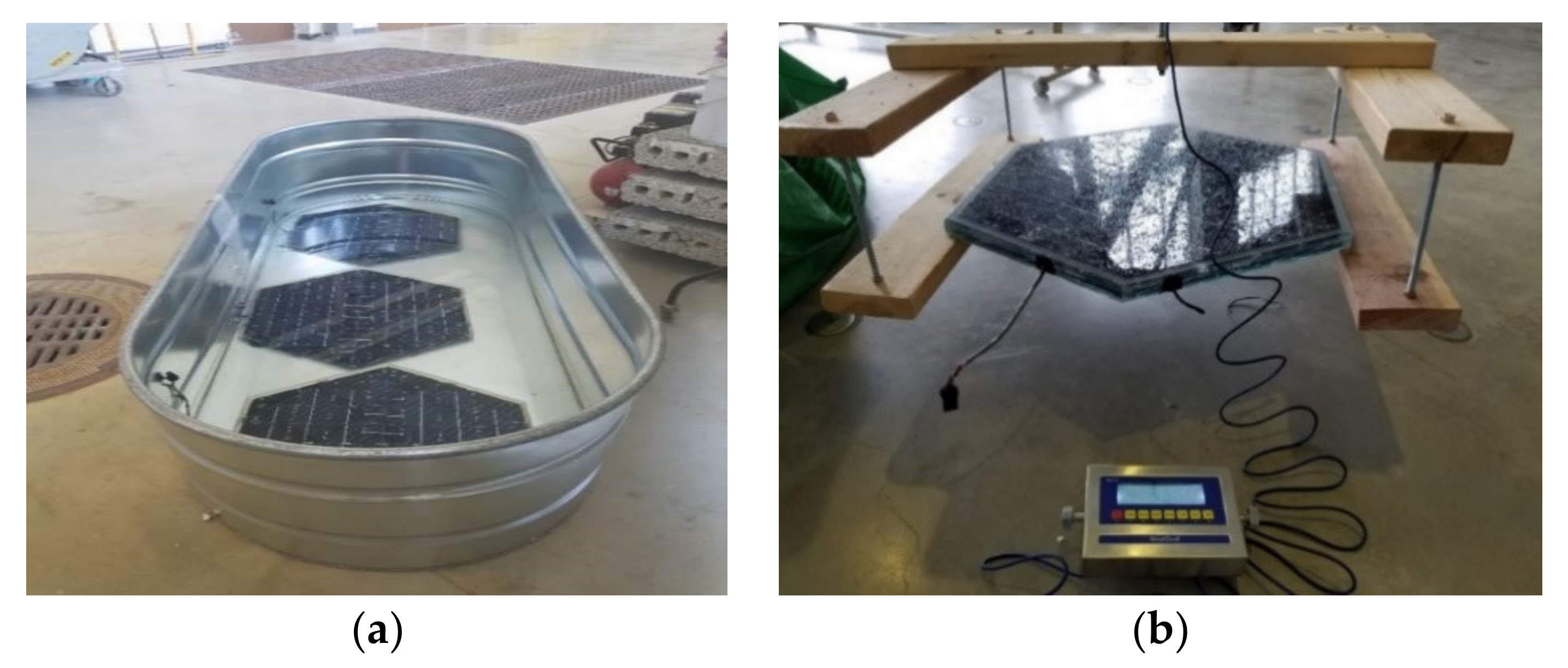
To investigate the mechanical and operational robustness of solar road panels (SRPs) in wet conditions, moisture conditioning test was conducted.
To assess mechanical and electrical functionality in real word conditions, the SRPs were exposed to repetitive cycling of temperature extremes.
To assess structural robustness (rutting, fatigue, fracture) of the SRPs under repetitive loading (as roadways are subjected to repetitive vehicle loads) heavy vehicle simulation (HVS) tests were conducted.
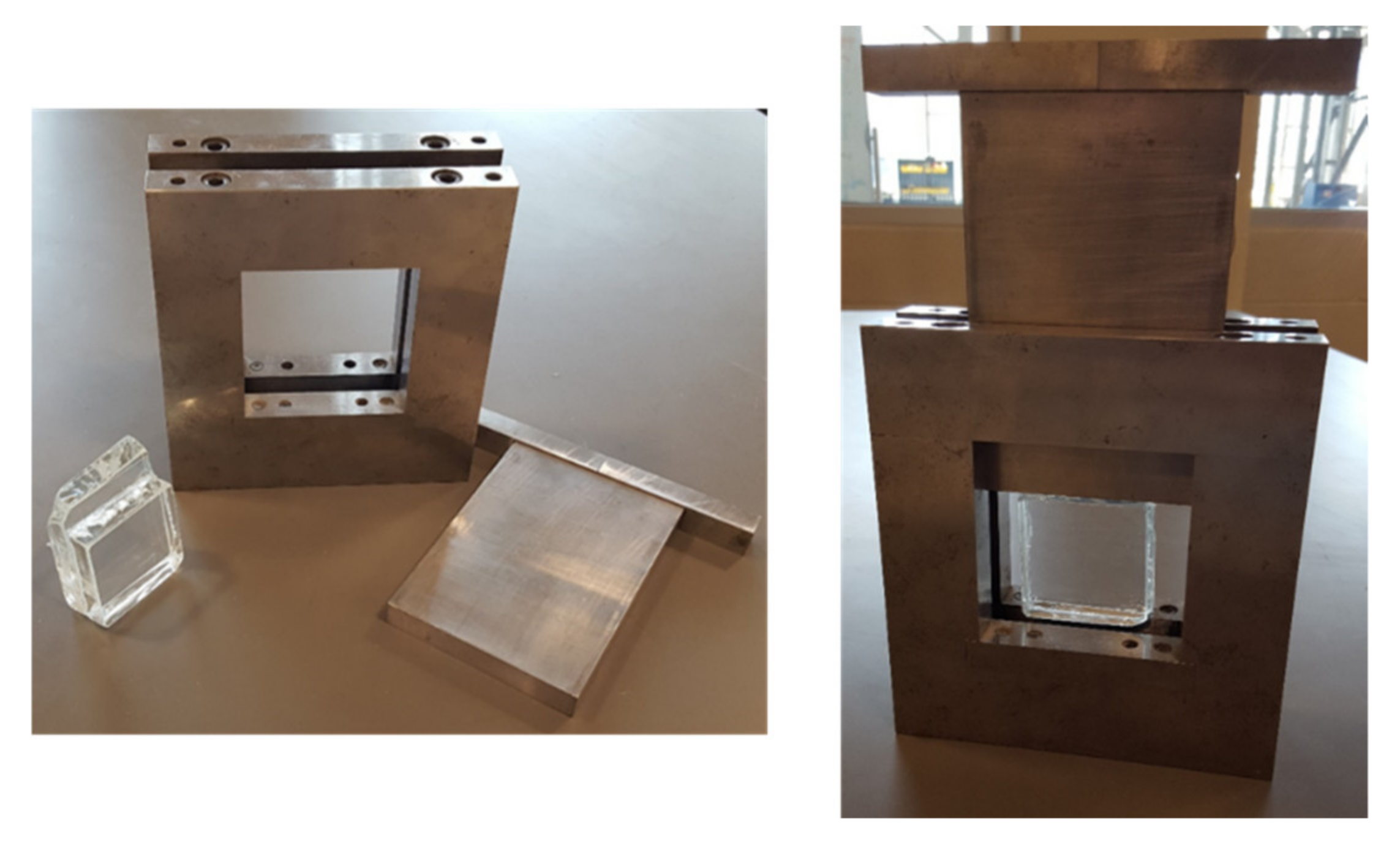
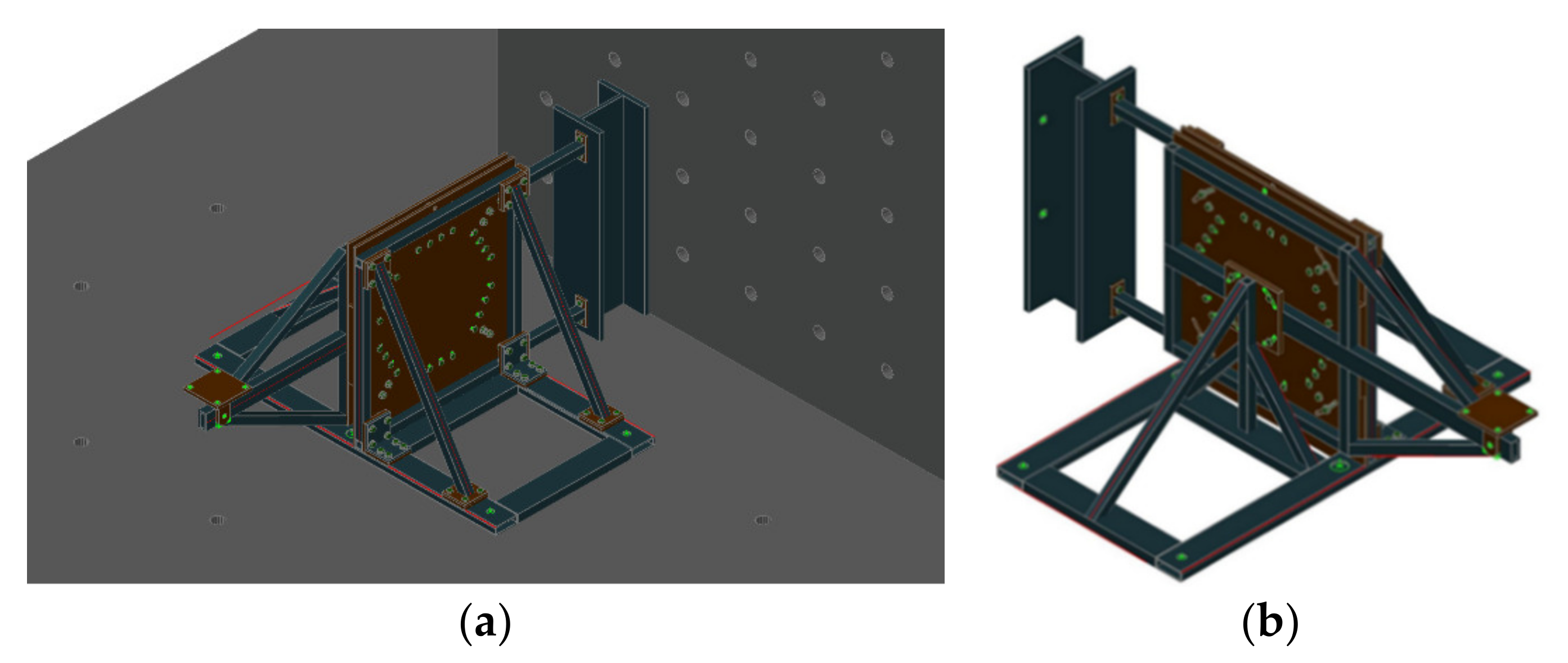
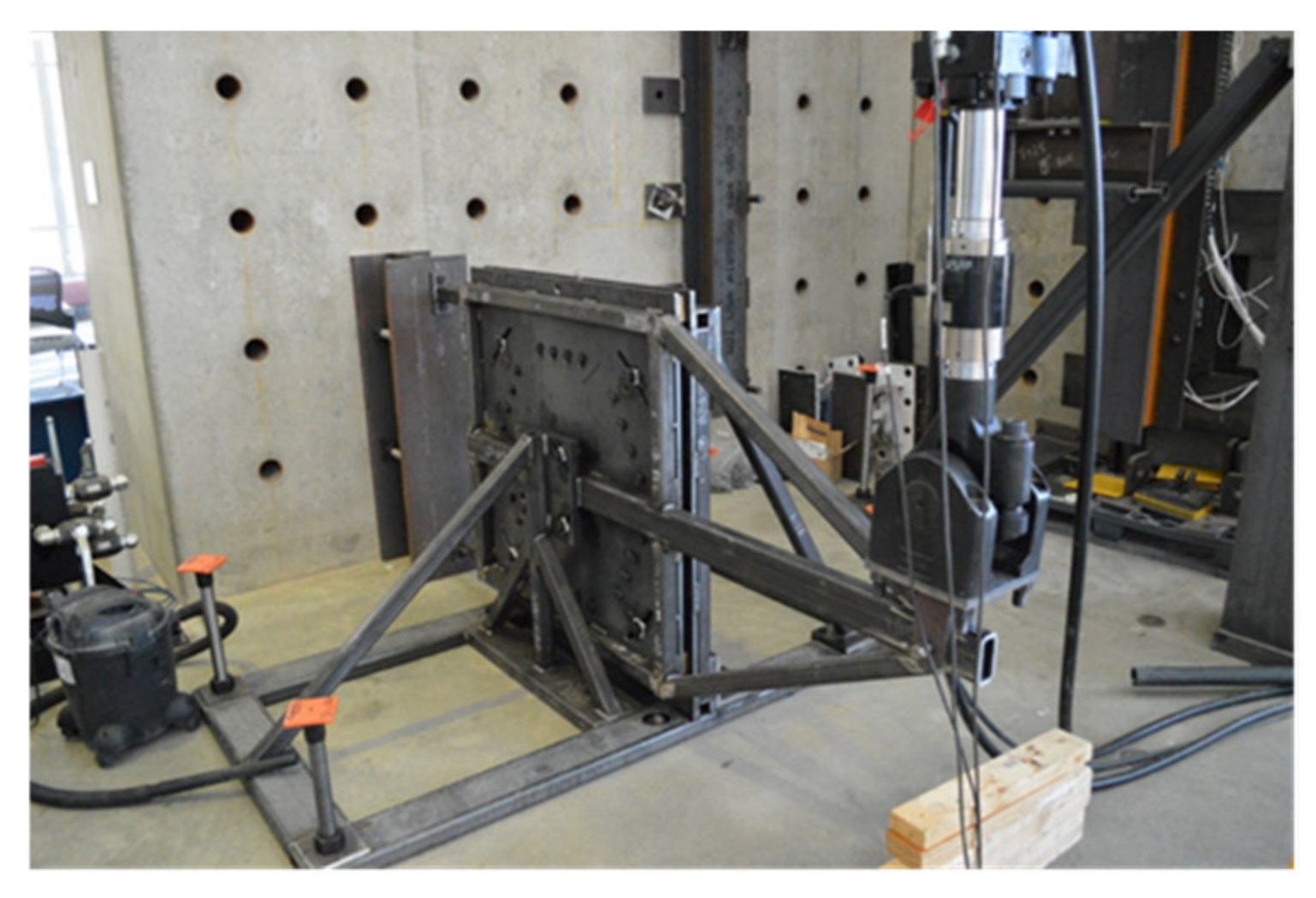
Shear testing was performed to determine the shear strength of the SRP composite and to evaluate the unit’s performance under vehicle deceleration.
The above four tests were performed on Solar Roadways “SR3” prototype panels or solar road panels (SRP). Testing was performed on the Marquette University (MU) campus in the Engineering Materials and Structural Testing Laboratory (EMSTL) and the SR Pilot Project area. Detailed results of the first three tests have already been published [
32]. The remaining sections of this paper present the materials and prototypes (
Section 2), a brief review of the first three engineering tests (
Section 3 and
Section 4), a detailed account of shear testing (
Section 5), and the conclusions (
Section 6) and acknowledgements.
2. Materials and Prototypes
In this project, prototype solar panels were manufactured by Solar Roadways
®, Inc. using a proprietary process [
27]. For pavement applications the solar pavement was expected to meet the following requirements, as described by Solar Roadway, Inc. in Sandpoint, ID [
27]:
Capable of generating its own power from solar PV, solar thermal or vehicle vibration.
Facilitate the transferring, storing and distributing the generated power efficiently.
Be constructed of recycled or other sustainable materials.
Be modular in design so that damaged or worn section can be replaced quickly and easily.
Withstand repetitive heavy traffic loading and be structurally durable.
Meet or exceed safety standards of existing pavement systems.
Mitigate water runoff through either permeability or designed retention and filtration.
Be cost effective, i.e., the benefits of power generation and water runoff mitigation over the operational life outweigh its initial cost.
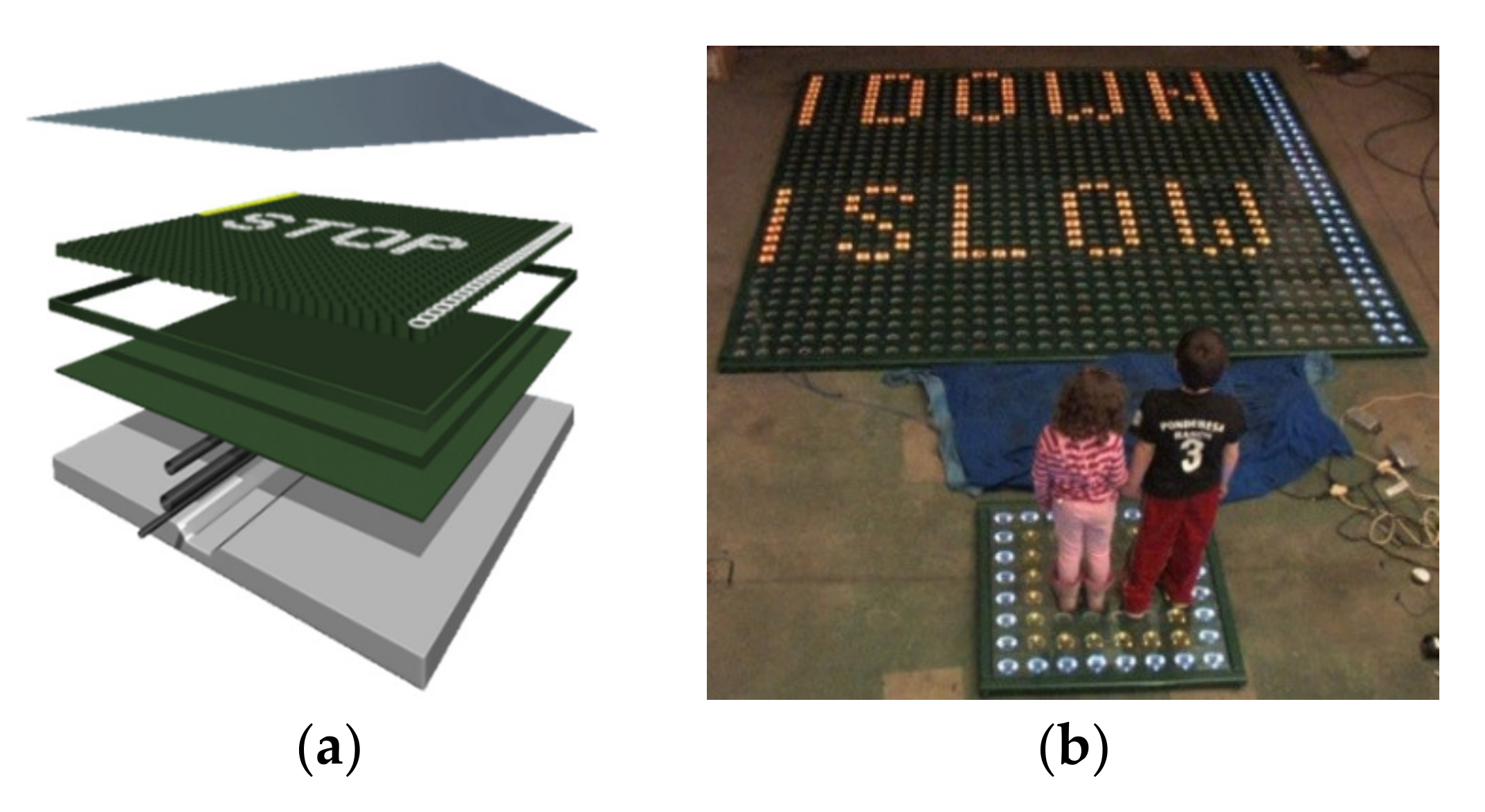
In the first prototype, “SR1” Solar Roadways
®, Inc constructed a 3.66 m × 3.66 m (13.38 m
2) panel array shown in
Figure 1 below. To make a solar panel that could withstand the abuse of fully-loaded tractor trailers, a protective case had to be created to protect the sensitive solar cells and electronics inside. Additionally, the surface of this case had to be transparent to allow the sunlight to reach the solar cells inside. SRI decided to use glass for the surface according to the recommendation of Penn State’s Materials Research Institute and the University of Dayton’s Research Institute (Brusaw, 2016). Unlike plastic, the optical properties of glass are stable against solarization (long-term darkening) and other UV induced mechanisms of material degradation. Float glass was recommended due to its widespread commercial availability and relatively low cost. Float glass comes in different forms, one of which is soda Lyme glass that contains iron particles. The amount of iron content affects the transmittance (ability to pass sunlight) of the glass, so a low-iron glass was selected. The SR1 also contained LED and microprocessor circuitry. The SR1 was designed around a 32 × 32 array of LED cells. Each cell contains three white and three yellow LEDs to simulate road line paint configurations.
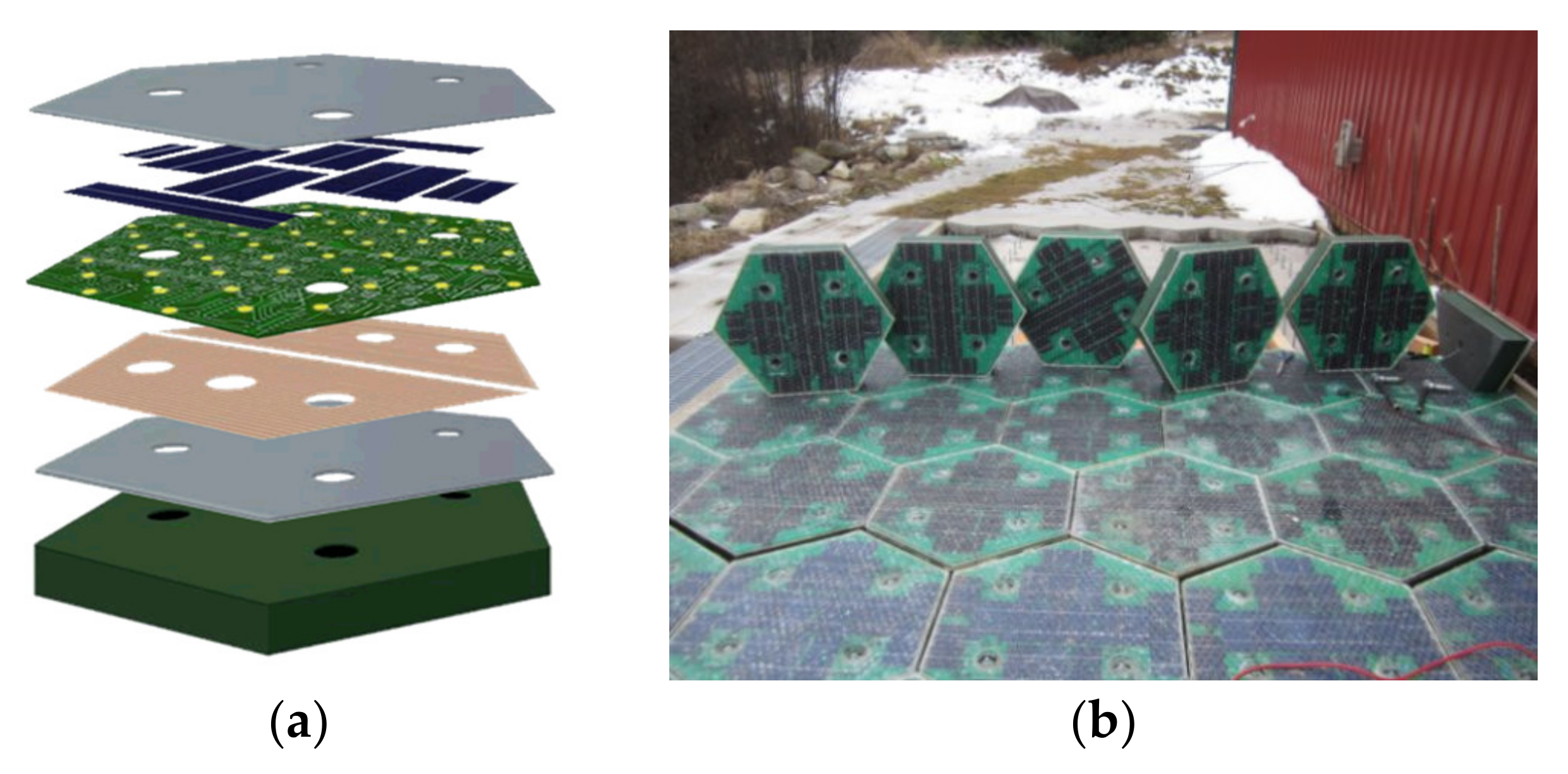
The phase 1 prototype was never exposed to any civil engineering tests. It was not known whether the glass used in solar pavement could withstand the load abuse of a fully loaded semi-truck. The surface of the glass needs to be textured to prevent vehicles from sliding on a wet surface while maintaining good solar transmission characteristics. In phase 2 SRI built a proof of concept parking lot with solar pavement and conducted civil engineering tests that included: (1) load testing; (2) traction testing; and (3) impact resistance testing. In Phase 2 SRI developed a new design, “SR2”, (see
Figure 2). The SR1 prototypes were impractical in size (3.66 m × 3.66 m), extremely heavy and difficult to transport. Additionally, the square shape made the panels not suitable for curved paths a or hilly terrain. “SR2” panels are hexagonal in shape, with a four squares foot area. The weight of the panel is 49.90 kg, which makes it easier to transport. The small hexagon shape also allowed SR2 to accommodate curves and hills. In this design they used heated glass (purchased from Aliso Viejo, California), that has been in the rear windows of cars since at least the 1970′s. The load tests conducted by SR shows that SR panels can withstand a static load of 113,398 kg which is over three times weight of a fully loaded semi-truck (36,287.39 Kg). SRI verified the load testing capabilities using 3D Finite element methods (FEM). The British Pendulum test was used to analyze the traction properties of the glass. The results of traction testing showed that the surface of the “SR2” was enough to allow a passenger vehicle traveling 64.37 kmph to come to a complete stop in the required distance. This result is sufficient for use in a parking lot environment. For the highway, however, the SR2 textured front glass was improved and traction test showed the samples exceeded the desired skid distance numbers. According to the tester, asphalt with these skid numbers qualifies for vehicles traveling at a mean speed of 128.75 kmph on a wet surface. It was also observed that 52,397 Wh of power can be generated from the output of four hexagon SRPs over a six-month period in a typical test location.
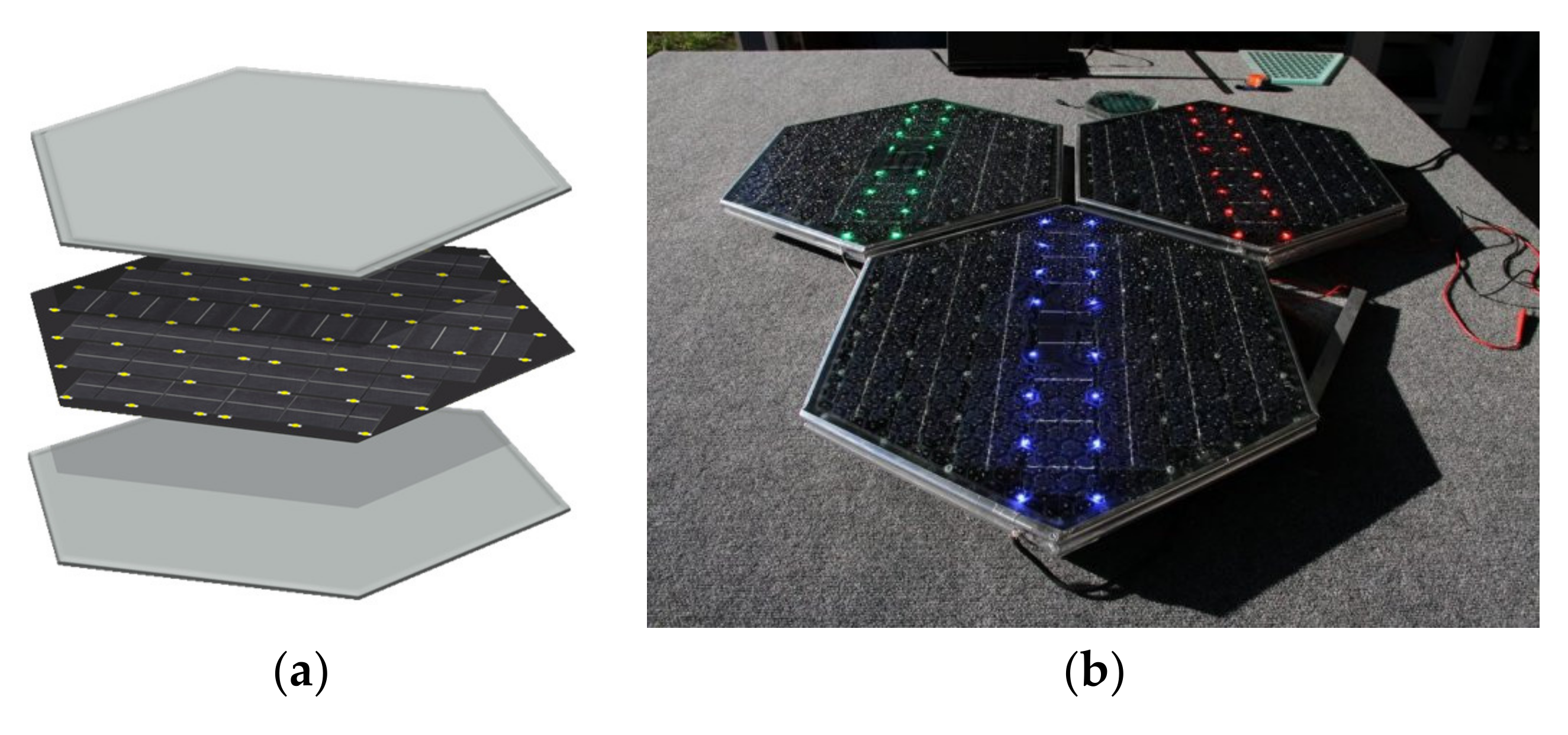
The “SR2” prototype has mounting holes, which reduces 31% of coverage area. In the “SR3” (see
Figure 3) prototype SRI used edge connectors instead of mounting holes, which increases mounting area by 25%. Furthermore, the panel’s output increased by 12 W from 36 W to 48 W. The edge connector also aids in ease of installation. The “SR3” uses higher intensity LED’s that are more visible in bright light.
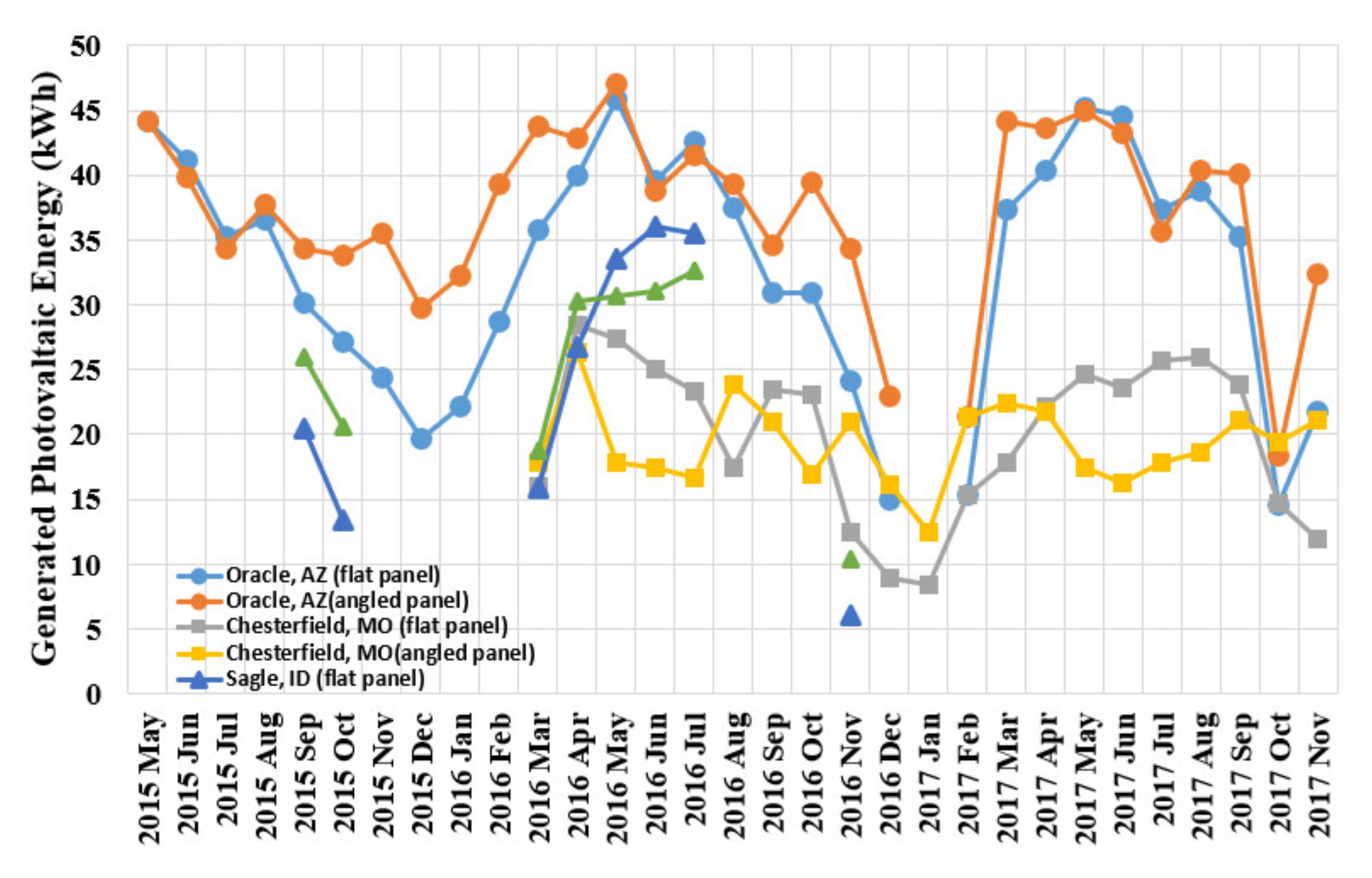
The main purpose of the SRPs is electricity generation. Solar Roadway Inc. collected some energy harvesting data for solar panel at three different latitudes in USA, (i.e., Oracle, AZ (Latitude 32°34′47.38" N); Chesterfield, MO (38°38′27.81" N); Sagle, ID (48°13′49.38" N). SRI used commercially available solar panels. Since the pavement panel will be flat unlike roof top panels, SRI collected two types of data: one keeping the panels flat, the other with the panel placed at optimal angle. 250 W solar panels were used in the Oracle, AZ and Chesterfield, MO sites, whereas in Sagle, ID site 220 W panels were used.
Figure 4 shows all harvesting data from May 2015 to November 2017. Earlier Solar Roadways have conducted power generation capabilities of their “SR2” solar road panel prototypes. Four of these hexagonal panels can produce 52.397 KWh energy over six-month periods as recorded in micro-inverter. A 12 feet wide lane can accommodate 15,840 panels per lane mile. Therefore, the estimated energy production is 414.984 MWh per year per lane mile. This is estimated for a 69% coverage area. However, for “SR3” prototype cell coverage is near 100%. In that case the energy output will be 601.426 MWh per year per lane mile. Estimated energy consumption for LEDs is 601.426 MWh per year per lane mile, if they are on 100% of the time (which is very unlikely). Similarly, the microprocessor section will consume 106.311 MWh per year per lane mile assuming they are active 100% of the time. Subtracting these consumptions net energy production is 302.51 MWh per year per lane mile, which can serve the electricity need of 30 residential utility customers per lane mile. For 100% (as in the case of SR3 prototype) coverage, this number will increase to 43 customers. Therefore, a two-lane road in a rural area can provides off grid electricity for 86 homes along the Canadian border. Moving to the southern part of the country this number increases.
4. Heavy Vehicle Simulation (HVS)
Roadway pavement are subjected to continuous vehicle load. Due to vehicle load and repetitive load cycling pavement material failure occurs, for example rutting and fatigue in asphalt pavements. Rutting refers to the permanent deformation of the roadway material in the vehicle wheel paths. This commonly occurs due to repetitive load cycling on a flexible pavement at elevated pavement temperature. With the SRI panels, there is far less chance of rutting as we are using hard tempered glass. Fatigue is the failure of pavement structure due to repetitive flexural bending. Under repetitive vehicle loading the strength of the pavement material is reduced and eventually fatigue failure occurs. As mentioned before the SRPs consist of laminate material sandwiched between two glass layers. The glass and polymer have different compressive strengths, hardness’s and elastic properties. To evaluate the SRP mechanical properties and electrical functionality in real-world conditions, the heavy vehicle simulation (HVS) test was performed. The test was conducted in the SR Pilot Project area located on the south side of Engineering Hall; Marquette University Campus as shown in
Figure 6. Limited electrical testing was accomplished to verify paver operation before and during HVS testing and consisted of verifying LED operations.
HVS testing was planned based on a load of 40 kN (9000 lbs.) super single test wheel load making one million, bi-directional passes at slow speeds of (3–5 mph) along the centerline of the SRPs (i.e., without wheel wander). This test (heavy vehicle simulation (HVS)) was intended to evaluate system performance under extreme loading conditions (i.e., heavy wheel loads traveling at slow speeds) according to the equivalent single axle loading (ESAL) concept developed by the American Association of State Highway Transportation Officials (AASHTO). The slow rate of travel represents the worst case in terms of damage to the panel. Testing was accomplished with the SRP grid installed on the surface of a doweled, jointed plain concrete pavement (JPCP) composed of a 25.4 cm concrete slab over a 15.24 cm crushed aggregate base layer over a silty-clay subgrade. The HVS test rig was earth grounded via the side rails to avoid static electricity concerns associated with the dry winter season.
Although the test was initially designed for 40 kN load, the actual wheel load for HVS testing was 42.22 kN. The wheel speed was 0.57 m/s, the relative damage induced by these loading variables was analyzed. According to the equivalent single axle loading (ESAL) concept developed by the American Association of State Highway Transportation Officials (AASHTO). Based on the fourth power approximation for equivalent loadings, a 42.22 kN single wheel load can be approximately 1.241 times (i.e., (42.22/40)4 = 1.24 ESALs) more damaging than the 40 kN wheel load. Furthermore, allowable ESALs on concrete pavements are inversely related to the static modulus of sub grade reaction k-value. When used in the context of the AASHTO concrete pavement design, converting from wheel loads traveling at highway speeds to creep speeds may be simulated by a 50% reduction in the design subgrade k-value. Comparing allowable ESALs over a range of design subgrade k-values yields a speed related damage factor of approximately 1.25, i.e., the slowly moving wheel loads are approximately 1.25 times more damaging than loads traveling at highway speeds. Combining the noted load and speed effects, each pass of the HVS can be equated to approximately 1.55 ESALs (i.e., 1.24 × 1.25 = 1.551).
Six SRPs with serial number 015A-015F were used for the HVS testing. A wooden structure was fabricated to keep the panels in place while the rolling load passed over them. The test begun on 9 July and ended on 30 September 2018. No physical damage on any of the SRPs was observed at the test conclusion. There was no cracking or rutting on the top or bottom glass. The laminated polymer layer showed no deformation. The LEDs in all six panel were operational prior to the test. However, during the test LED functionality degraded gradually. At the end of the test, the LEDs in two pavers (serial number 015A and 015E) were not operational. LEDs on another two pavers (serial number 015B and 0015C) were operational but ended in random pattern within two hours of powering on or color reset. Approximately one-third of the LEDs in pavers 015D and 015F remained operational. LED status at the beginning and near the end of the test is depicted in
Figure 7.
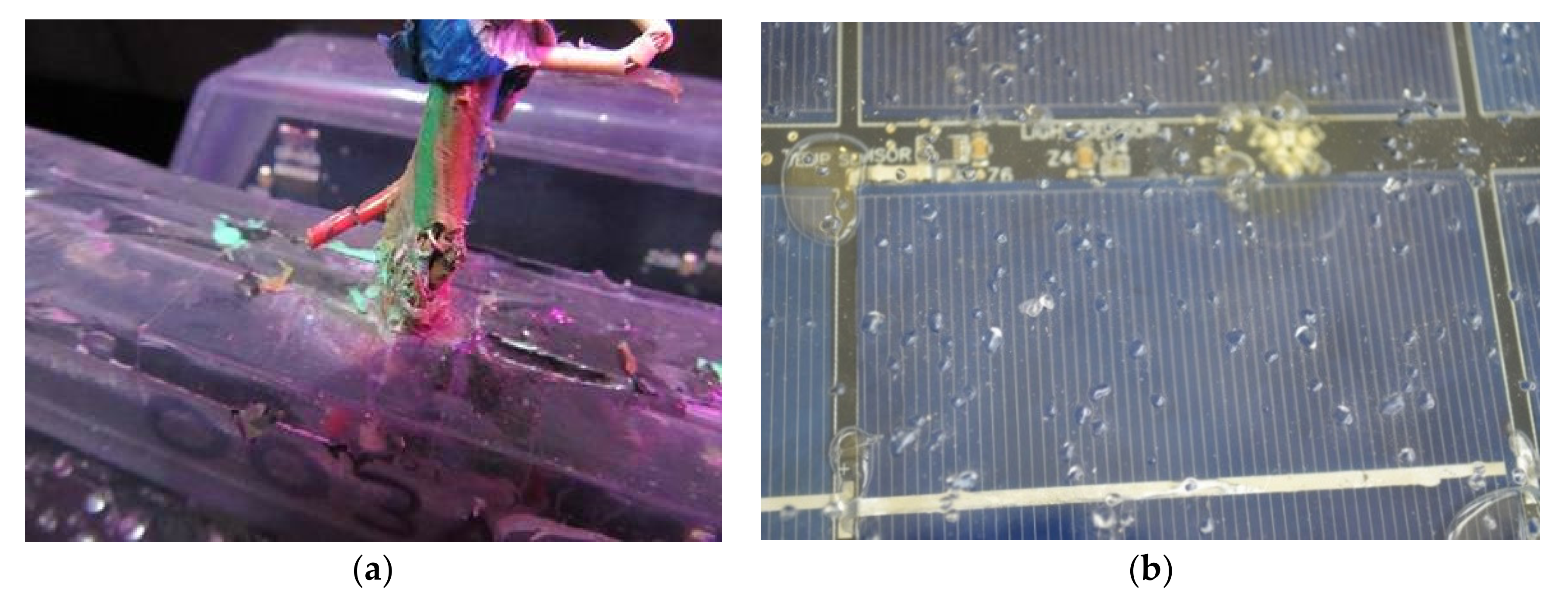
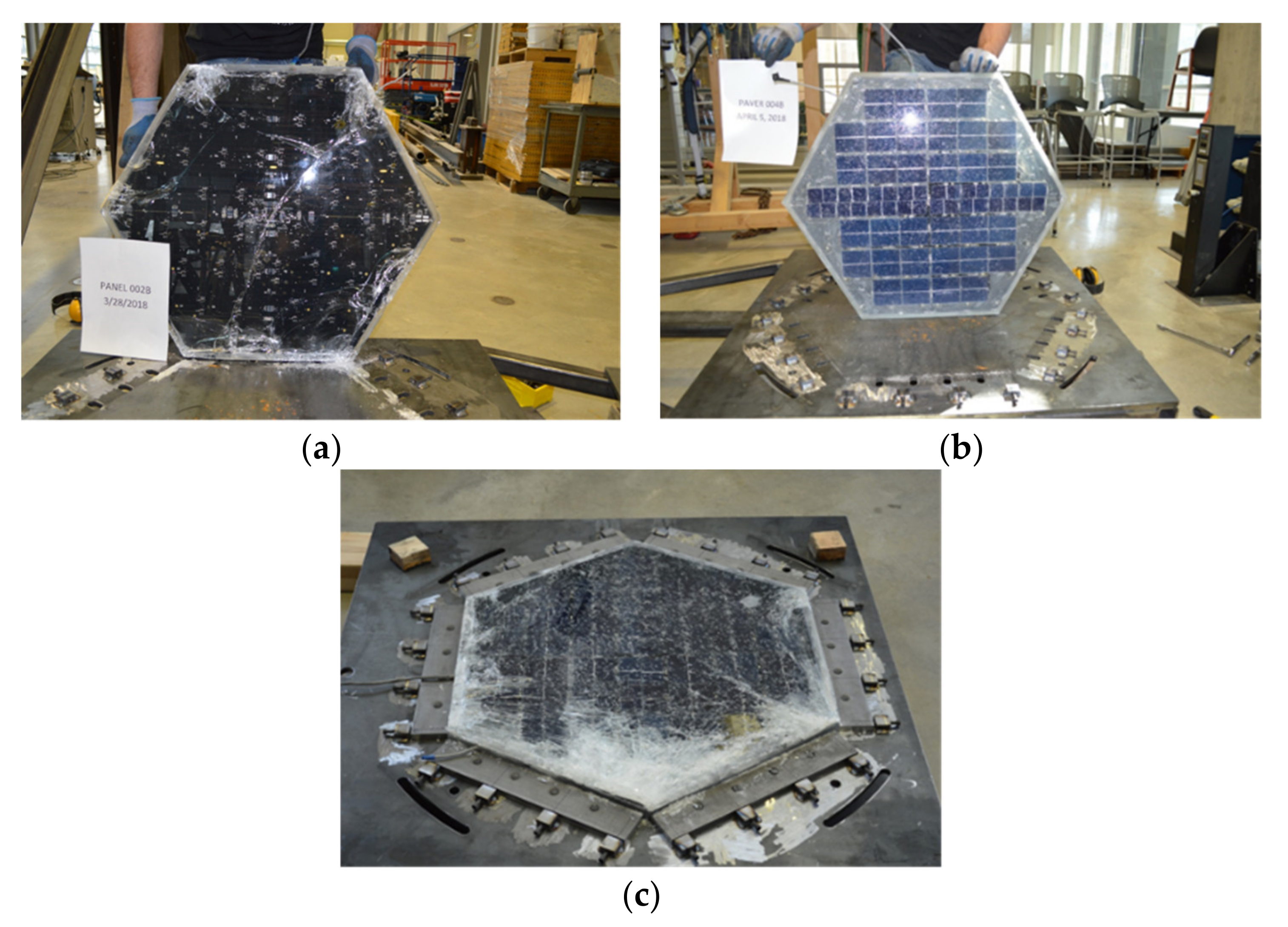
The degradation of the LED performance is not due to repeated loading. It was attributed to the process uncertainty during SRP manufacturing as shown in
Figure 8a, for example (i.e., cracked internal PV cells, internal in-polymer “bubble” formations, variances in the external “etched” surface grip/traction features, etc.). In addition, the continuous outdoor operation may have allowed moisture ingress from cracked wire shields as also observed in moisture test, as shown in
Figure 8b.


 ,
, 

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}