Abstract
Achieving global coverage and performance goals for 6G requires seamless integration of satellite and terrestrial networks, yet current operational frameworks lack common standards for managing these heterogeneous infrastructures. This paper addresses the critical need for unified satellite-terrestrial network operations by proposing the CMS framework, a novel task-scheduling-based approach that bridges the operational gap between satellite operations (SatOps) and network operations (NetOps). The framework integrates satellite-specific constraints with network service requirements and QoS metrics through constraint satisfaction programming and multi-objective optimization. Three novel architectures are introduced: integrated operations (embedding NetOps within SatOps), coordinated operations (unified control with separate execution channels), and adaptive operations (mutual adaptation through intelligent interfaces). Each architecture addresses different connectivity scenarios and integration requirements for both sporadic and persistent satellite constellations. The proposed architectures are evaluated against challenges spanning infrastructure and architecture, interoperability and standardization, integrated management, operational dynamics, and technology maturation and deployment. Validation through simulation demonstrates significant performance improvements, with task completion rates improving by 17.87% to 44.02% and data throughput gains of 25.09% to 93.62% compared to traditional approaches. The CMS framework establishes a resilient operational standard for future 6G networks, offering practical solutions to bridge the current divide between satellite and terrestrial network operations.
1. Introduction
The space economy has evolved significantly over the past decades. Exploiting the space segment used to be mainly feasible for governmental agencies with public investment, but technological breakthroughs have led to the New Space era [1]. This disruptive trend is characterized by increased participation from both the private and public sectors, with commercial ventures, government projects, and innovative startups driving advancements in satellite technology, and interplanetary exploration. The New Space era has fundamentally transformed the satellite industry, with SpaceX already deploying over 5000 Starlink satellites and Amazon’s Kuiper constellation planning 3236 satellites, demonstrating unprecedented commercial investment and deployment capabilities [2]. OneWeb, Telesat, and GW (a Chinese state-owned company) are similarly developing mega-constellations that will collectively deploy tens of thousands of satellites in LEO [3]. This transformation is challenging to fully characterize, but the following factors have played key roles [4]: (1) the adoption of COTS and CubeSat platforms, (2) the miniaturization of satellite hardware, (3) the transformation of traditionally hardware-centric systems into software-defined systems, and (4) the reduction in the cost of the space launchers. This New Space economy has boosted private investment growth for space missions. Although this affects a wide range of technological and scientific areas, this paper focuses on satellite telecommunications services, which stand out alongside EO missions [5].
Satellite constellations for telecommunications services are not new to the industry. LEO satellite constellations were attempted in the early 20th century, including Iridium, Gobalstar, O3b and Teledesic. Nowadays, emerging constellations like Starlink, OneWeb, Telesat, and Kuiper offer internet access services over satellite [6]. A survey of 251 New Space commercial satellite constellations is presented in [7], where different classifications based on relevant criteria are presented. Table 1 aggregates the statistical data from this survey under three classifications that are especially relevant for this research: (1) mission application or field, (2) satellite form factor, and (3) satellite orbit. The percentages shown represent the proportion of constellations in each category as reported in the original survey. These results indicate that the most upcoming constellations will soon be LEO smallsat constellations.

Table 1.
Survey summary.
Traditionally, these constellations operated as standalone systems without a common standard, but a shift is anticipated for future constellations. The 6G recommendation by ITU envisions seamless interworking between these constellations and terrestrial networks to achieve global connectivity, especially in rural and remote areas without terrestrial network coverage [8]. The technical realization of this seamless interworking involves several key enablers: dynamic spectrum sharing between satellite and terrestrial networks using cognitive radio techniques and RSMA (rate-splitting multiple access) [9], unified radio access network (RAN) architectures supporting both terrestrial and satellite air interfaces with AI-native design principles, and AI-driven network orchestration for automated handovers and adaptive resource allocation across heterogeneous network segments [10]. Recent advances in open RAN technologies further facilitate this convergence by enabling disaggregated and programmable network functions that can dynamically adapt to satellite and terrestrial requirements.
By combining both networks, 6G aims to provide broadband services in developed areas via cellular networks while extending connectivity to remote areas through satellites. This integrated approach is also expected to overcome conventional network limitations and enable ubiquitous, seamless, and global communication [11]. Advances in 6G non-terrestrial networks demonstrate significant progress in AI-empowered satellite operations [12,13], multi-connectivity solutions for enhanced performance [14], and hybrid network architectures integrating reconfigurable intelligent surfaces [15].
The 3GPP, as the primary standardization body for mobile networks, has been adapting its standards for NTN, which refers explicitly to satellite and other non-ground-based communication systems defined within the 3GPP framework. Table 2 summarizes the contributions to NTN standardization, compiled from official 3GPP technical reports for each release [16,17,18] and relevant technical literature [19]. The information was extracted and categorized to highlight the progressive development of NTN integration within the 3GPP framework. Together, ITU and 3GPP aim to promote a shared and open standard for 6G that integrates NTN, which allows different network components from different vendors to work together harmoniously, eliminating compatibility issues and reducing complexity in both deployment and operation. A common standard fosters interoperability, innovation, and competition by allowing multiple actors to develop interoperable solutions, leading to more efficient, cost-effective, and reliable services. Ultimately, a unified NTN standard is essential for achieving a truly integrated and ubiquitous network capable of supporting diverse applications and improving connectivity for users worldwide.
Table 2.
Summarized 3GPP releases contribution to NTN standardization.
The integration of TN and NTN presents numerous challenges, such as NTN operation and network orchestration, traffic allocation, optimal node allocation, and satellite payload constraints [20]. Within contemporary communication systems, distinct entities typically conceive and manage satellite and terrestrial networks. Despite considerable interest in integrated satellite-terrestrial networks, the seamless integration of these two infrastructures remains an unresolved challenge [21]. This work targets integrating satellite and network operations and management.
MNOs and SNOs are increasingly motivated to work together, driven not only by technical challenges but also by the pressures of regional politics and spectrum ownership. The convergence of their operations is rooted in three main factors: (1) limited orbital slots, (2) spectrum scarcity, and (3) economic considerations [22]. With only a finite number of orbital slots available, operating private satellites is impractical for each MNO. Additionally, SNOs lack sufficient spectrum to build completely private networks, creating an incentive for spectrum sharing. Economically, the cost of independent space infrastructure is prohibitive for MNOs, while SNOs often struggle to generate adequate revenue operating in isolation. Partnerships between MNOs and SNOs thus would provide a service-based model that benefits both sectors, making collaboration not just advantageous but necessary. Ongoing research demonstrates enhanced performance in hybrid satellite-terrestrial networks through joint optimization approaches [23], while autonomous multi-mission orchestration frameworks enable coordinated operations across heterogeneous constellation architectures [24].
This cooperation introduces a technical challenge in integrating satellite and network management operations. SatOps refer to the operational commands and procedures for managing satellite platform subsystems, including payload configuration, resource management, attitude control, power systems, and communication subsystem control. These operations traditionally follow task-scheduling methodologies due to the resource-constrained nature of satellite platforms and intermittent connectivity constraints. NetOps, in contrast, encompass the management operations for network infrastructure, including service deployment, resource allocation, policy management, and quality of service enforcement. In the context of integrated satellite-terrestrial networks, NetOps primarily involve MANO operations such as VNF deployment, SDN control, and dynamic resource orchestration, typically following real-time or near-real-time management paradigms. Satellite and network operators have long followed these distinct operational methodologies, each shaped by the historical paradigms and technical constraints of their respective industries. Network operators and satellite operators bring different technical approaches that are optimized to meet their unique operational environments and objectives. As these sectors converge, aligning these divergent operational methodologies is key to creating a cohesive, efficient system that leverages the strengths of both MNOs and SNOs.
Satellite operations historically rely on task scheduling, whereas terrestrial networks employ (near) real-time mechanisms (e.g., resource allocation based on network metrics). However, integrating satellite and terrestrial networks requires a hybrid approach, bridging these two operational frameworks. Given their compatibility with low-connectivity networks, certain use cases, such as IoT and messaging services, may align more closely with satellite operations. Conversely, services like broadband and backhauling over satellites may adopt methodologies akin to traditional terrestrial networks, owing to their reliance on high-connectivity NTN. Combining both operational paradigms is imperative for effective network management in either scenario.
This paper addresses the critical need for seamless integration of satellite and terrestrial network operations to achieve the coverage and performance goals envisioned for 6G, proposing a framework that bridges operational gaps and enhances interoperability between these traditionally distinct domains. The paper contributes with the following: (1) characterizing the distinct methodologies for satellite and network operations and identifying their integration gaps and challenges; (2) a novel and integrated management framework for operating satellite-based NTN named the CMS; (3) presenting several architectures using the novel management framework and featuring sporadic connectivity and persistent connectivity scenarios; and (4) evaluating the proposed architectures with the integrated management framework against the identified integration challenges.
The remainder of this paper is structured as follows. Section 2 surveys the proposed architectures in the literature for STIN and describes the management of satellite and network operations. Section 3 proposes the novel integrated management framework to operate a satellite-based NTN. Section 4 describes the design of different control architectures enabled by the CMS, covering sporadic and persistent connectivity constellations. Section 5 evaluates the key enabling features of the proposed management framework and operational architectures, and how they address the identified gaps and novel challenges that emerge from integrating both operational management methodologies. Finally, Section 6 concludes this work.
2. State of the Art
This section presents the state of the art in satellite communication constellation management, including several key components. First, satellite communication constellations, technologies, and architectural structures are analyzed. Then, satellite and constellation management systems, particularly those that address the satellite scheduling problem, are discussed. Envisioned operations management in STIN are described. Finally, the gaps and challenges identified in the existing literature are summarized, highlighting areas that require further research and development.
2.1. Communication Constellations Architectures
The services offered by NTNs can be broadly categorized into delay-tolerant and delay-sensitive. Delay-tolerant services include applications like non-instantaneous messaging and specific IoT monitoring use cases. In contrast, delay-sensitive services encompass near-real-time applications like Internet access and voice services.
The required level of connectivity for a satellite constellation or an integrated satellite-terrestrial system is crucial for defining the architecture and its subsequent operational management, which is the focus of this paper. Thus, two main types of architectures are identified in the literature, each corresponding directly to the type of service provided: delay-tolerant or delay-sensitive. This work identifies these architectures as sporadic connectivity networks and persistent connectivity networks, respectively.
2.1.1. Sporadic Connectivity Architectures
The potential for extending terrestrial IoT networks with satellite-based NTN is a relevant topic in the literature. A general reference IoT integrated architecture is presented in [25]. The main identified challenges for the integration of satellite-based communications with IoT technologies are: (1) routing in sparse LEO constellations [26], (2) the heterogeneous infrastructure, (3) mobility management, (4) core functionality placement, and (5) compliance with 5G standard architectures.
The challenges of an interrupted connection between UE and eNB when using 3GPP regenerative payloads are presented in [27]. The design of a fully functional NB-IoT over satellite for a smart agriculture scenario is addressed, and the NB-IoT technology and standardization efforts of 3GPP on NTN are further detailed. The viability of NB-IoT with a low density LEO CubeSat constellation at link budget level and architecture is studied in [28,29], with the latter presenting a testbed for NB-IoT over satellite. The studied scenarios use a regenerative payload and a distributed core network. The necessary adaptations for these scenarios are outlined: cell detection, frequency synchronization, physical rate, random access, timers, paging occasions, and discontinuous feeder link, among others.
In [30], authors present a testbed for nanosatellite communication constellations to evaluate a SaF communication network. This testbed platform is envisioned to support the research and development of autonomous constellation management, including scheduling and routing algorithms. Finally, a general architecture for a network control system with satellites is introduced in [31] at a theoretical level. They present the possible architectures and elements for the autonomous operation of a smallsat network. Key terms like asset profiling, heterogeneous systems, and the multi-costumer nature of the system are defined, and challenges of network control systems for upcoming constellations are identified (e.g., heterogeneity and multi-customer nature). The management of these architectures is further discussed in Section 2.2.1.
2.1.2. Persistent Connectivity Architectures
To maximize the potential of persistent connectivity constellations, they need to be integrated with terrestrial networks. This integration aims to leverage the strengths of both satellite and terrestrial infrastructures, enhancing overall connectivity and performance. When combined with terrestrial networks, persistent connectivity constellations can provide more robust and reliable services, meeting the demands of delay-sensitive applications [32]. Advances in space-air-ground integrated network architectures include efficient coverage area control [33] and novel approaches for joint communications and sensing in 6G satellite networks [34]. Additionally, model-based approaches for constellation design have emerged, enabling systematic integration of user requirements in EO missions [35].
A survey of satellite-terrestrial integrated architectures is presented in [11]. Authors classify the integration architectures into hybrid relay, backhaul, cognitive, and cooperative networks, depending on the level of interaction between satellites and the terrestrial network. The first two aim to enhance the transmission in one network by using the other. In cognitive ones, the networks operate separately but share the spectrum. Finally, cooperative networks combine the two, operating them simultaneously. Their work concludes that in current communication systems, satellite, and terrestrial networks are developed and operated separately and that although significant attention has been paid to the integrated satellite-terrestrial network, how to integrate the two networks effectively remains an open issue. This challenge is the focus of our research, which aims to achieve the convergence of management for both networks. The study in [11] also identifies several operational challenges in this integration, like mobility management, traffic offloading, routing, and resource management. It further highlights that enabling techniques and future directions, such as SDN and AI integration, are crucial to overcoming these operational challenges.
In [36], the integration of satellite and terrestrial networks is described as a series of incremental stages in the architecture. The first stage is a transparent architecture for backhaul, where satellites function as signal repeaters to enhance coverage. The second stage involves regenerative capabilities onboard the satellites. The third stage features an architecture with some core network functions distributed to the satellites. Finally, the ultimate stage, envisioned as a fully integrated network, is an SDN architecture where resources are entirely virtualized, and the architecture is divided into the infrastructure, virtualized resources, control, and application layers. The authors present a practical implementation of a first-stage architecture and conclude that NFV and programmable hardware onboard the satellites are key technologies to achieve this architecture stage. In [9], a new metric to evaluate the integration performance of a satellite-terrestrial network architecture is introduced. Using this new integration metric, they design an integrated network featuring a MEO constellation. In [37,38], a multi-layered architecture comprising a GEO and a LEO layer is proposed. Their work describes the management of the proposed architecture using SDN, with master satellites at the GEO layer and slave satellites at the LEO layer. The management of these architectures is further discussed in Section 2.2.2.
2.2. Satellite Operations and Management Systems
This section reviews the state of the art in satellite operations and management systems, considering sporadic connectivity constellations and persistent connectivity constellations separately. The first subsection examines traditional satellite operations, where mission management and communication systems are designed with intermittent connectivity periods in mind. Given that EO satellite operations share similar scenario constraints, they are also considered, providing valuable insights into managing sporadic connectivity constellations for telecommunications services. The second subsection explores how persistent connectivity constellations leverage advanced network management approaches to optimize operations, such as SDN and MANO. The continuous connectivity in these constellations enables management frameworks that closely resemble terrestrial network operations, facilitating automation, dynamic resource allocation, and service orchestration. This review highlights the evolution of satellite management paradigms and their convergence with modern networking technologies.
2.2.1. Operations in Sporadic Connectivity Constellations
Space operations management encompasses a broad spectrum of activities crucial for the successful planning and execution of satellite missions. As the complexity and scope of space missions continue to evolve, adherence to established standards, recommendations, and best practices becomes paramount to ensure mission success, data integrity, and interoperability across international space entities. The CCSDS is a cornerstone in establishing such standards and guidelines. Formed by leading space agencies and private companies globally, the CCSDS has been instrumental in developing frameworks that streamline space data and information systems. One of its directives is promoting efficient task-scheduling approaches tailored for satellite operations and missions [39].
Traditionally, space missions were usually operated by space agencies. They developed in-house management tools over the years out of the need to optimize the mission’s resources. The ESA started an initiative known as APSI [40] to improve the agency’s operations by providing an AI development framework for planning and scheduling. NASA has produced several mission planning tools as well: a framework for developing planning and scheduling applications denominated ASPEN [41], a tool for constrained-based temporal planning named EUROPA [42], and a planning toolkit called SPIFe [43]. The GSOC developed the PINTA [44] and PLATO [45] twin tools. The former is an interactive visualization software, and the latter is a mission management library for the automation of satellite operations. Finally, the STScI developed a general planning framework for the Hubble Space Telescope denominated SPIKE [46]. All the mentioned frameworks are specifically tailored for the space missions and methodologies of the different space agencies. Furthermore, most of them were released and abandoned because funding for that project was interrupted, which led to open code that was heavily outdated.
In the early 20th century, there was a boom in commercial satellite constellations for telecommunications, and several commercial mission planning tools were developed to manage satellite operations. The company SHAI developed the D-SpaCPlanS tool for the Iridium constellation [47]. Another example is the planning system used for EUTELSAT’s satellites [48] or the Hifly, COTS software developed by the company GMV [49]. Similarly, EO operations management is the scheduling for the ground segment of NASA’s CYGNSS mission for hurricane detection using FlexPlan, the general mission planning system from GMV. All the tools mentioned are proprietary and non-extendable, and specific software details are unavailable to the general public.
Previous authors have presented a survey of satellite operation strategies [50]. Their survey concludes that most approaches use mathematical programming and are solved mainly with heuristics and meta-heuristics. In [51], a task-scheduling model is presented for constrained energy resources in nanosat constellations. This formulation is extended in [52] by applying continuous time methodology to the potential windows for task scheduling. The classical problem of DADSSP for EO missions is presented in [53], in which the mathematical formulation of these types of scheduling problems is described. An example of a linear programming approach for an EO mission is presented in [54] and solved using a MILP solver, which produced better results than the conventional greedy algorithm. In [55], authors describe a clustering algorithm to improve the scheduling efficiency of on-demand tasks with sequencing constraints. The satellite range scheduling problem for ground contacts is described in [56].
Even though centralized methods are most widely used, another way to tackle operations management of a constellation is through a distributed or hybrid approach. These try to overcome the scalability limitations present in centralized systems. An overview of distributed planning and scheduling is presented in [57], in which the two main approaches are described: goal achievement and HTN. Their work remarks that satellite onboard decisions still require ground-based higher goal decisions (centralized scheduling). A hybrid approach is proposed in [58] because fully distributed solutions require frequent ISL communications to capture the global state of the constellation. A hybrid model with a centralized layer to allocate tasks based on global information and a distributed layer to coordinate single satellites is proposed. Distributed systems usually rely on multi-agent-based negotiation assignment methods and rely on ML algorithms.
Task scheduling can be further classified into two categories: (1) online scheduling and (2) offline scheduling. The latter schedules tasks that are known a priori, while the former schedules dynamic tasks that appear throughout the scheduled plan. In [59], the online scheduling of unpredictable incoming EO tasks is described. Two ways of dealing with such dynamic tasks are online control and online learning. Lyapunov optimization [60] is used for this specific use case to solve the regret minimization problem under time-averaged constraints.
An example of operations control for an operative EO mission is described in [61]. The tool used for scheduling the ground segment of NASA’s CYGNSS mission for hurricane detection is described. The paper presents the different architectural components of FlexPlan, the general mission planning system from GMV. A detailed description of how Planet manages the operations of its three main constellations (RapidEye, SkySat, and Dove) is presented in [62]. The RapidEye constellation does not require any deconfliction algorithms. Satellites are tasked using the in-house APS software, and human interaction is only present if an alarm is triggered. SkySat constellation tasking is partially automated, with input tasks being operator-defined. Finally, the Dove constellation is always imaging and does not depend on user-based tasks. Therefore, the in-house planning tool deconflicts and optimizes daily activities. All the processes are automated, with only human supervision once a day. The nominal operations of this constellation are automatic, including telemetry monitoring and schedule uploads.
More examples of COTS software for satellite operations are also presented in [63]. Epoch Integrated Product Suite (IPS) is an automation tool for satellite nominal operations, namely TC/TM. Braxton ControlPoint (AceCP) is a tool focused on ground segment procedures automation, namely GS antenna scheduling, GS control and status, and TC/TM. Like IPS, the spacecraft-specific scheduling needs to be plugged in by a third party. Major Tom is a cloud-based tool based on the open-source flight software stack Kubos. Major Tom is focused on automating the GSN, TM management and anomaly detection, and file transfer monitoring. Finally, the Hifly satellite control system from GMV is a mission and fleet management tool, offering cross-ground synchronization, anomaly detection, automatic execution of nominal passes, and generation of analysis reports. SCOOP is another example of an operations planning and scheduling tool for EO missions [64]. The Microwaves and Radar Institute of DLR has developed the tool. The software has two cores: (1) the simulator, which is a COTS tool called FreeFlyer, and (2) the planner, written in Perl. SCOOP software has a detailed definition of constraint, both temporal and for resources. The scheduler, however, is quite simple: first, it allocates GS passes in FIFO and then data acquisition tasks are ordered in priority again in FIFO.
A power-aware toolchain for satellite operations management is presented in [65,66]. The Hands-Off Operations Platform (HOOP) combines a series of modules to automate the scheduling of satellite operations, including telemetry processing and contact plan design. The toolchain incorporates TM and mission planning APIs, mission models based on STK plugins, the mentioned deep battery model, and a dynamic programming scheduler. The authors also present space tests of the deep battery model and the toolchain in an in-orbit mission.
The evolution toward autonomous satellite operations has been significantly advanced through AI frameworks for trusted autonomous satellite operations [67]. These developments address the growing complexity of managing large-scale constellations while ensuring reliability and performance in resource-constrained environments.
2.2.2. Operations in Persistent Connectivity Constellations
The development of SDN has revolutionized the landscape of network management by decoupling the control plane from the data plane, enabling more dynamic, flexible, and programmable network architectures. SDNs offer a robust framework for addressing these challenges. By leveraging centralized control and programmability, SDNs facilitate efficient traffic management, resource allocation, and fault tolerance in NTNs. This capability is crucial for maintaining the performance and reliability of these networks, which operate in dynamic and often unpredictable environments. Furthermore, SDNs enable seamless integration of NTNs with terrestrial networks, creating a unified and cohesive global communication infrastructure. This integration is essential for achieving ubiquitous connectivity, enhancing network resilience, and supporting various applications from remote sensing to global broadband internet access. Through advanced routing protocols, traffic engineering, and virtualization techniques, SDNs provide the tools to manage the heterogeneity and scale of integrated terrestrial and non-terrestrial networks.
In [68], the challenges of orchestrating the heterogeneous resources of an integrated network are identified. Efficient and intelligent network management is proposed with a SDN control plane that includes terrestrial and satellite controllers for unified, integrated network control. In [69], authors acknowledge that current STIN paradigms face challenges such as unstable ISL, inefficient spectrum sharing, and interoperability issues between SatCom and TerCom networks. Additionally, STINs require more intelligent operation systems to manage resources effectively and implement advanced functions like predictive maintenance. They concur that the solution is an SDN architecture with software-defined satellites for dynamic configuration of satellite functions, distributed controller deployment to improve interoperability, and scenario/service-oriented flexible networking to adapt to customized network requirements. In [70], the SDN controller placement problem to satellite networks is extended. This problem can be transformed into a task assignment problem to better align with SNOs.
NFV represents a transformative approach to network architecture, wherein traditional network functions are decoupled from dedicated hardware and implemented as software instances running on commodity hardware. This virtualization reduces the dependency on specialized hardware and enhances network operations’ flexibility, scalability, and cost-efficiency. NFV is emerging as a key enabler for integrating satellite and terrestrial networks. Virtualizing network functions allows for the dynamic deployment and scaling of network services across satellite and terrestrial components. This capability is essential for addressing the unique challenges of satellite networks, such as varying latency, bandwidth constraints, and dynamic topologies. When combined with SDNs, NFV provides an even more robust framework for the integral management and orchestration of satellite networks. SDNs offer centralized control and programmability, while NFV enables the rapid deployment and adjustment of network functions in response to changing network conditions. They facilitate comprehensive and flexible network management, enhancing satellite-terrestrial integrated networks’ performance, reliability, and efficiency. A critical component in this framework is MANO, which plays a pivotal role in deploying and operating NFV-based systems. MANO encompasses the functions required for the provisioning and lifecycle management of network services and virtualized resources. It ensures that the virtualized infrastructure and network functions operate harmoniously, providing the necessary automation, coordination, and optimization.
Advances in software-defined networking for satellite systems have introduced distributed SDN control approaches for reliable satellite-terrestrial integration [71], addressing the unique challenges of dynamic topologies and varying connectivity in space-based networks. These approaches complement autonomous orchestration frameworks that enable multi-mission coordination across heterogeneous satellite constellations [24].
MANOs in terrestrial networks are not autonomous nor schedulable. In [72], the challenges of deploying VNF on the satellites of a constellation network are tackled. The key enabling processes to deploy VNF on satellites are the automated mapping and scheduling of these functions in SDN-enabled networks. The existing literature emphasizes VNF scheduling in terrestrial networks, leaving a gap in addressing the dynamic topology of STINs. This challenge is addressed in [73], where a spatial-aware extension for state-of-the-art MANO is proposed. In [74], authors also tackle the challenge of VNF deployment on satellites, and they propose a distributed CN onboard the satellites containing the necessary network functions to operate with minimal ground CN interaction. Another example of orchestration and management approach for HCC is presented in [75]; three different cooperation models between satellite and terrestrial networks are identified, and intelligent orchestration is required to dynamically decide which of the three cooperation models is used for each service. In [76], traditional TTC is adapted with a novel architecture based on satellite Internet. Two key technologies are identified: dynamic network scheduling management and task planning under complex constraint conditions to achieve efficient operation of the proposed system.
Some authors in the literature present management architectures that allow for the control and orchestration of NFV-and-SDN-enabled satellite networks. In [77], a testbed for the network management of a relay node is presented based on trusted non-3GPP access architecture. They propose that the entire NTN is a virtualized layer of the integrated network and that it will be operated using OSM. The testbed uses a GEO satellite for the NTN layer, and authors claim that this forms a basis for a plug-and-play approach to the integration of satellite and terrestrial 5G network operators. Authors in [78,79] present resource management architectures for multi-layered satellite networks. In [78], an architecture based on an intelligent AI-driven MANO is presented that generates network slices to comply with user service demands. The architecture is divided into three abstracted resource management functions, which work independently with their close-loop AI training: access-level (encompassing satellites, GSs, and CN), service-level, and resource-level. Authors in [79] provide a detailed example of managing a multi-layered constellation. They propose a clustering algorithm where SDN controllers are deployed as masters in the MEO layer and slaves at the LEO layer. However, each LEO slave satellite is the local controller of a LEO satellite cluster to reduce queuing and network complexity. They present how the MEO satellites collect network data through the LEO cluster leaders, decide resource slicing based on these data and the user service, and how LEO controllers allocate these resources in their local cluster.
An architectural framework for the control plane of integrated networks is presented in [80]. The authors present a centralized, integrated network control that aggregates the four different control planes: RAN, NTN, CN, and data network. The authors describe the NTN individual network control system in detail. This NTN control system receives control commands from the integrated network control system and sends aggregated control data back to it. Similarly, it interacts with the physical components of the NTN segment by sending control commands and receiving control data from them. The NTN control system comprises several architectural modules. The Control Data Service manages the incoming and outgoing control data. The Network State Analysis module evaluates and predicts network resources, taking the expected service requirements from the service requirements repository as input. The Network Resource Allocation, Management, and Optimization module uses AI/ML to allocate resources for the future expected network requirements. Finally, the Network Control and Orchestration module generates the control commands to be sent to the NTN segment based on the resource allocation. Even though HCC enables near-real-time feedback from the network status, the authors identify that control messages should be scheduled reasonably so as not to flood the network with constant control signaling. This same concept is explored in [81], where the authors propose a pre-operations solver (before ops) and an operations solver (during ops) for the management of a satellite network under uncertainties.
Recent research has also focused on optimizing constellation design for mega-constellation scenarios, with approaches achieving significant reductions in required satellites while maintaining performance requirements [82]. These optimization frameworks are essential for addressing the scalability challenges identified in traditional satellite operations management.
The tools and frameworks reviewed in this section, spanning both sporadic and persistent connectivity operations, exhibit several common limitations that highlight the need for an integrated management approach. Table 3 summarizes the key characteristics and shortcomings of the major solutions identified in the literature, categorized by their operational focus and deployment context.
Table 3.
Analysis of existing satellite operations and management tools.
2.2.3. Security Considerations in Integrated Satellite–Terrestrial Networks
The integration of satellite and terrestrial networks introduces unique security challenges that differ significantly from traditional terrestrial network security paradigms. Recent research has identified critical security aspects that must be considered in integrated NTN-TN operational frameworks, particularly for distributed control scenarios.
Physical layer security has emerged as a fundamental requirement for satellite communications, addressing challenges such as eavesdropping, jamming, and spoofing attacks in the open broadcast nature of satellite links [83]. The space environment presents unique vulnerabilities due to the accessibility of radio frequency transmissions and the difficulty of implementing traditional physical security measures.
Authentication and key management in integrated networks face particular challenges due to high latency, intermittent connectivity, and the need for seamless handoffs between satellite and terrestrial domains. Recent work has proposed anonymous access and roaming authentication protocols specifically designed for 6G satellite–ground integrated networks, addressing privacy preservation and efficient authentication switching [84].
SDN security in satellite networks requires specialized approaches due to the dynamic topology and distributed control nature of satellite constellations. Comprehensive security frameworks have been developed to address controller security, policy synchronization, and attack detection in distributed SDN environments [85]. These frameworks achieve significant improvements in preventing interception and spoofing attacks while maintaining sub-second response times for threat detection.
Authentication mechanisms for satellite communication systems have evolved to address the unique constraints of space-based platforms, including limited computational resources and power constraints. Comprehensive surveys of authentication methods highlight the development of lightweight protocols, blockchain-based authentication, and chaos-based encryption techniques specifically tailored for satellite environments [86].
System-level security evaluation frameworks have been developed to assess the overall security posture of satellite systems, encompassing ground segments, space segments, and communication links. These frameworks provide systematic approaches for identifying vulnerabilities across the complete satellite ecosystem [87].
While these security considerations are crucial for integrated satellite-terrestrial network deployments, a comprehensive security analysis of the proposed CMS framework and operational architectures is beyond the scope of this paper. Future work should address security requirements for task-scheduling systems, authentication mechanisms for multi-operator environments, and secure communication protocols for distributed constellation management.
2.3. Research Insights and Challenges
The analysis of existing tools and approaches reveals several critical limitations that motivate the development of the novel integrated management framework. This section presents a summary of the challenges and gaps identified in the literature. The general insights from the literature highlight several key points. First, there is a notable lack of interoperability between network and satellite operators for operations management, prompting various architectural proposals for better integration of satellite and terrestrial networks. Improvement areas include uncertainty modeling, as satellite telecommunications are subject to many uncertainty sources. These can be mitigated through dynamic scheduling, advanced uncertainty modeling, ML, and distributed scheduling. Operations management also plays an essential role in traffic management, with operational data serving as a critical input for optimizing network activities like routing and queuing. In scheduling, centralized approaches face scalability and timeliness issues. In contrast, distributed approaches lack global information or require extensive messaging between satellites, making a hybrid approach advantageous in resource-constrained, uncertain environments. ML emerges as a promising tool for distributed scheduling, enabling efficient adaptation to variable conditions despite onboard resource limitations.
The standardization insights reveal that significant efforts are ongoing within 3GPP to integrate NTNs with terrestrial infrastructure. However, while 3GPP provides guidelines for satellite-terrestrial integration, it does not cover specific satellite operations, assuming that the necessary adaptations for integration will occur without issue. This gap forms the core focus of our study, which seeks to determine how to operate satellite constellations in compliance with terrestrial network standards, ensuring a seamless integration between the two systems.
The insights from sporadic connectivity constellations indicate that commercial satellite constellations, particularly those with sporadic connectivity, typically rely on custom tools and semi-manual procedures for satellite operations, as detailed information on persistent connectivity networks is not publicly available. Research on sporadic constellations focuses heavily on EO missions, with no existing literature that adapts EO satellite task-scheduling methods for telecommunications applications. EO studies emphasize offline task scheduling with task priorities as the main optimization metric, providing valuable but unoptimized solutions for telecommunications needs. While EO algorithms for task scheduling could be beneficial for telecommunications, their performance is often tailored to specific EO scenarios, presenting challenges when applying them to the dynamic requirements of telecommunications. Although EO scheduling algorithms are well-documented, adapting them to telecommunications scenarios remains a largely uncharted area in research.
Insights from persistent connectivity constellations and integrated networks reveal that satellite and terrestrial networks are currently developed and operated as separate systems, though much recent work focuses on achieving integration. However, integrating these two network types remains an open challenge, with a consensus in the literature pointing to the need for intelligent, efficient management and orchestration. A multi-layered constellation is often envisioned as the persistent connectivity architecture for integrated satellite-terrestrial networks, where network management is typically based on NFV and SDN as applied in 5G terrestrial networks—a concept now being adapted to NTN. However, most proposed resource management architectures in NTN derive directly from terrestrial network models, often disregarding the specific roles of satellite operators and focusing solely on network metrics. Effective integration will require network resource management and satellite operations to work cooperatively rather than merely reacting to each other as external factors.
Current literature primarily offers theoretical models for integrated networks, lacking practical implementations since many 5G technologies essential for NTN integration are still unstandardized. Proposed architectures mostly assume near-real-time connectivity yet require scheduled and predictive resource management to optimize control and allocation. Concepts like network slicing, resource allocation, SDN control, and VNF deployment can theoretically be mapped to schedulable tasks. However, MANO-based VNF deployment lacks autonomy and scheduling, remaining a manual process. Even in highly connected architectures, efficient network operation can benefit from resource prediction and pre-allocation through task scheduling, where scheduled operations run in tandem with near-real-time solvers to optimize performance.
These insights from the literature analysis reveal fundamental gaps and challenges that must be addressed for effective satellite-terrestrial network integration. The existing solutions and their limitations highlight that potential management approaches in the literature typically fall into two categories: sporadic connectivity constellation operations and persistent connectivity constellation operations. Each category comes with specific limitations that directly translate into technical and operational challenges, as outlined in Table 4, which describes how the CMS addresses these identified gaps. Building upon these insights, Table 5 systematically categorizes the challenges that emerge from the literature analysis, spanning five critical areas: infrastructure and architecture, interoperability and standardization, integrated management, operational dynamics, and technology maturation and deployment. These challenges form the foundation for the design requirements and capabilities of the proposed CMS framework.
Table 4.
Management solutions in the literature.
Table 5.
CMS challenges.
3. Integrated Management Framework
This paper presents an integrated management framework, named the CMS, designed to unify the satellite and network operations of a NTN. The foundation of this framework is a task-scheduling approach chosen for its robustness and extensive validation through years of space missions, aligning with the recommendations of the CCSDS. This ensures broad acceptance within the space sector. The need for this approach becomes evident when considering the operational demands of both sporadic and persistent networks. In sporadic connectivity scenarios, task scheduling facilitates the management of operations during link discontinuities, ensuring continuous mission progress. On the other hand, in high connectivity environments, it allows for the prediction and scheduling of operations in a centralized and batched manner. This minimizes the need for constant control signaling, preventing system flooding while enabling the coordination of complex tasks such as pointing and tracking. Additionally, it accommodates the integration of external service providers, such as GSN and external relay constellations, which require prior scheduling and booking [88]. Furthermore, autonomous satellites can leverage a predicted schedule for onboard decision making in distributed systems.
The CMS is a task-scheduling framework that enables operations management automation, integrating satellite operation methodologies with those of network management. This framework, along with its surrounding architecture, facilitates efficient satellite network management, bridging the gap between these two domains. It generates and distributes optimized schedules and coordinates constellation operations among multiple SNOs and MNOs to seamlessly integrate a satellite-based NTN with terrestrial networks, while ensuring fair resource allocation and operational efficiency across all stakeholders. The representation of the CMS with all its submodules and interactions is presented in Figure 1. The blue boxes represent the logical modules of the framework, while the dotted boxes illustrate a simplified overview of the input and output information for each module.
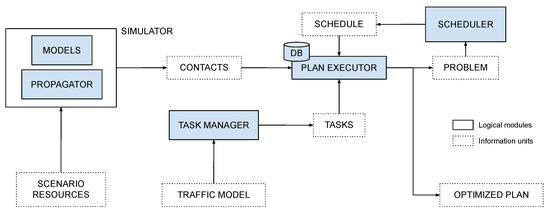
Figure 1.
CMS modules and interconnections.
The Simulator is the module in charge of propagating the constellation state. It computes future contact opportunities to provide them to the scheduler for task allocation. This module also contains resource models to propagate the general state of the satellites accurately, not only their orbit. As such, the operator can define the scenario resources and elements (satellites, service areas, GS, etc.) in the dedicated database, and the simulator will propagate the element’s states and compute the contact topology of the schedule.
The Task Manager is the module that generates the initial tasks to be assigned by the scheduler. To generate the tasks, this module contains information regarding the expected traffic model of the provided service. This, combined with the scenario contact topology provided by the plan executor, allows the module to generate an initial unassigned task list, a required input for the scheduler. As such, the operator can define the scenario traffic model in the dedicated database.
The Plan Executor is the coordinating module that enables an autonomous and dynamic execution of the CMS. The module is responsible of triggering and configuring reschedules based on the system feedback. It is also responsible for the timely delivery of the produced plans to their corresponding agents (GSN operators, SNO, etc.). The plan executor has a dedicated database to store and maintain past schedules, predicted system resources, and system telemetry metrics. The operator can configure the plan executor to set the rescheduling criteria and scheduling configuration, such as the planning period. This module is further explained in Section 3.1 and is presented in detail in [89].
The Scheduler is a scheduling engine with an optimization algorithm, which generates an optimal global schedule based on the implemented constraints and objective functions. These include system and business constraints and metrics from satellite operations, network management, and QoS assurance. The scheduler takes as input an unassigned schedule or problem (as depicted in the Figure 1), and produces an optimized schedule as output. The operator can configure the optimization algorithm parameters, the constraints used in the optimization loop, and their relative weights in the solution evaluation. This module is further explained in Section 3.2 and is presented in detail in [90].
3.1. Plan Executor Module Technical Implementation
The Plan Executor serves as the orchestrating module that enables autonomous and dynamic operation of the CMS through closed-loop optimization and adaptive scheduling capabilities.
3.1.1. Dynamic Execution Process
The Plan Executor manages the complete scheduling lifecycle through a sequence of coordinated operations: (1) triggering reschedules based on system feedback, time periods, or operator intervention, (2) coordinating with the simulator to obtain updated contact windows, (3) interfacing with the Task Manager to generate initial task lists incorporating failed tasks and remaining assignments from previous schedules, (4) updating satellite resource states using telemetry feedback, (5) invoking the scheduler optimization process, and (6) distributing the resulting plans to respective system agents. The execution diagram is illustrated in Figure 2.
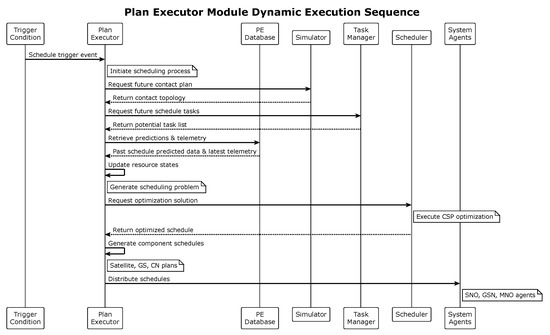
Figure 2.
Sequence diagram of the Plan Executor’s dynamic execution.
3.1.2. Telemetry Integration and Feedback Loop
The module implements a telemetry feedback mechanism that continuously monitors satellite resource levels (memory, energy) and task completion status. When deviations from predicted states are detected, the Plan Executor automatically triggers rescheduling to accommodate these changes. This closed-loop approach enables the system to react to scenario uncertainties and maintain optimal performance despite dynamic conditions. The module maintains databases for schedule history, resource predictions, and telemetry data to support this adaptive capability.
3.1.3. Autonomous Operation Capabilities
The Plan Executor operates autonomously with configurable parameters for rescheduling criteria, planning horizons, and optimization weights. It manages the timing of operational updates to prevent system flooding with control messages while ensuring responsiveness to critical changes. The module supports both periodic and event-driven rescheduling, enabling flexible adaptation to different operational requirements and constellation characteristics.
3.1.4. Error Handling
The framework addresses specific failure scenarios through differentiated handling mechanisms. Task failures due to satellite malfunctions or communication disruptions are automatically detected through telemetry monitoring and reintegrated into subsequent scheduling cycles with elevated priority based on deadline proximity. The system prevents cascading failures through its modular architecture, where component failures remain isolated within their respective modules. Resource constraint violations trigger immediate rescheduling with updated resource models derived from actual telemetry data, ensuring realistic resource allocation in subsequent planning cycles [89]. The multi-trigger rescheduling approach enables the system to respond to various operational disruptions while maintaining scheduling efficiency and preventing task loss in dynamic operational environments.
3.2. Scheduler Module Technical Implementation
The scheduler module employs a CSP approach using an open-source framework built upon a constraint satisfaction engine. The mathematical formulation addresses a multi-objective optimization problem specifically tailored for satellite task scheduling in NTN environments.
3.2.1. Data Model and Problem Structure
The scheduling problem follows a hierarchical structure with three planning categories: (1) the planning solution containing the complete problem and solution space, (2) planning entities representing individual tasks to be scheduled, and (3) planning variables defining the assignable values (satellites, targets, and start times). Each task is characterized by resource requirements (memory and energy), task type, duration, and priority weight. The model incorporates tasks including authentication requests, data uploads/downloads, and 3GPP-specific procedures.
3.2.2. Constraint Framework
The optimization employs a three-level hierarchical scoring system: hard constraints ensuring feasibility (temporal bounds, resource limits, task precedence), medium constraints reflecting business objectives (task assignment rewards, prioritization), and soft constraints optimizing operational efficiency (early scheduling, resource state optimization, latency minimization). The mathematical formulation includes both general constraints and 3GPP-specific procedural constraints to ensure compliance with telecommunication standards.
3.2.3. Optimization Algorithm
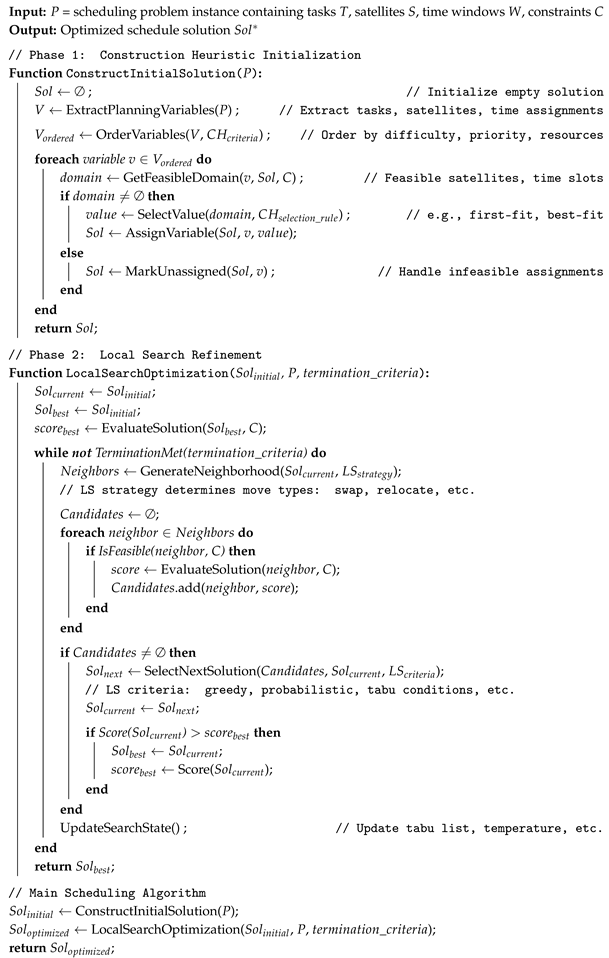
The scheduler combines CH and LS algorithms. The CH phase uses a first-fit decreasing algorithm that orders tasks by allocation difficulty, ensuring the most constrained tasks are scheduled first. The LS phase employs a variety of algorithms such as simulated annealing or tabu search with a dynamic tabu list to avoid local optima and explore the solution space effectively. The algorithm uses lexicographic ordering combined with weighted sum methods to handle the multi-objective nature of the problem. The pseudo-code for this optimization approach is presented in Algorithm 1.
| Algorithm 1 Two-phase task-scheduling optimization |
 |
4. Architectures
This section presents the design of four different architectures using the CMS to operate a satellite-based NTN. The architectures are classified depending on the interaction between NetOps and SatOps. Three different types of interactions are defined: (1) integrated operations refers to a control architecture where the NetOps are integrated into the SatOps; (2) coordinated operations refers to a control architecture where both NetOps and SatOps are coordinated by the same agent (the CMS), but executed through separate channels; and (3) adaptive operations refers to a control architecture where NetOps and SatOps are adapted to each other, respectively, and executed through separate channels as well. See Figure 3 for a schematic representation of the different operational interactions.
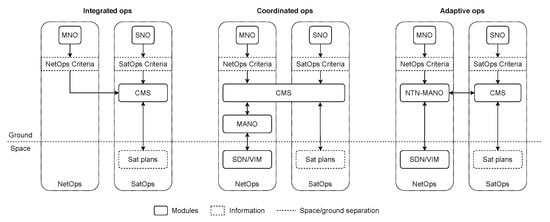
Figure 3.
Operational architecture types for satellite-terrestrial network integration showing different NetOps-SatOps interaction models. Integrated Operations: NetOps are fully integrated into SatOps within the CMS framework, with unified control generating satellite plans for both ground and space segments. Coordinated Operations: NetOps and SatOps are coordinated by the CMS but executed through separate channels, with MANO handling network orchestration and SDN/VIM management while CMS manages satellite operations. Adaptive Operations: NetOps and SatOps adapt to each other through bidirectional interfaces, with CMS managing satellite operations and an intelligent NTN-MANO autonomously handling network orchestration through SDN/VIM, enabling mutual adaptation between operational domains.
In sporadic connectivity constellations, an integrated control architecture is the most appropriate choice due to its adaptability to traditional SatOps, which are well-suited for discontinuous operations and scheduled tasks. Nonetheless, an integrated architecture is also applied in a persistent connectivity constellation, demonstrating its versatility across both scenarios. In contrast, the coordinated and adaptive architectures are better suited for persistent connectivity constellations, as they leverage SDN and NFV, technologies more aligned with the demands of highly connected, terrestrial-like networks. Table 6 illustrates the mapping between the different operational architectures and their suitability for different connectivity scenarios. The difference between using the coordinated or the adaptive architectures in a persistent connectivity constellation will depend on the MANO capabilities, especially if the MANO has the autonomy and the intelligence to adapt NetOps to a set of SatOps.
Table 6.
Different architectures depending on: (1) the relation between SatOps and NetOps; and (2) the NTN connectivity. The X mark indicates the suitability of the architecture for a connectivity scenario.
4.1. Integrated Operations
Figure 4 presents an example of a sporadic connectivity constellation featuring a sparse LEO constellation extending the coverage of delay-tolerant IoT application. In this figure, the IoT device is connected to the IoT server using SaF mechanisms and regenerative payloads on the satellites [29]. In the diagram, the arrows indicate service data flow except for the feeder link (where both operational and service data are transmitted) and the connection between GS and ground control (only operational data).
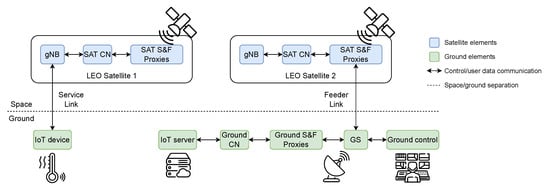
Figure 4.
Sporadic connectivity scenario featuring a sparse LEO constellation for IoT services.
Figure 5 presents the control architecture design for sporadic connectivity cases like the example. As can be observed, the system is controlled using only SatOps, namely, platform and ground control commands. The CMS takes as inputs the operational criteria from both MNO and SNO. That information generates control commands for the satellites and ground elements using the same interfaces as traditional SatOps. However, the CMS will try to align these SatOps as best as possible these SatOps with the NetOps criteria and intent rules from the network manager.
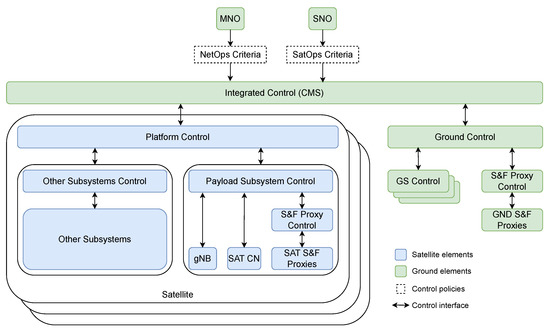
Figure 5.
Control diagram using integrated operations for a sporadic connectivity constellation. The CMS receives operational criteria from both MNO and SNO, generating unified control commands for satellite platform subsystems and ground elements. Platform control manages satellite OM including payload configuration for gNB, CN functions, and SaF proxies. Ground control coordinates GS passes and ground-based SaF proxies. All operations follow traditional satellite interfaces while incorporating network operational requirements.
As for the satellite control, the platform commands are used to change the OM of the satellite. The platform OM is a predefined configuration of all the platform subsystems, including the payload. In this case, the payload subsystem control involves commanding and configuring the RAN, CN, and SaF proxies, enabling discontinuous communication. Regarding ground control, the CMS schedules GS passes and ground SaF proxies to coordinate the transmissions with those scheduled onboard the satellites. The CMS receives feedback from satellite telemetry and ground operations control to dynamically adapt the commands and react to system uncertainties.
A use case of persistent connectivity is also presented using the integrated control architecture with the CMS. An example scenario is shown in Figure 6, featuring a multilayered constellation providing direct-to-handset 5G connectivity. The constellation is composed of a dense LEO constellation and a MEO or GEO constellation of relay satellites. All satellites use regenerative payload since the gNB is on the ground. The operational and service data are separated into different planes in this scenario. The operational plane uses the LDA of the LEO constellation to offer a low data rate yet high availability link through the network. The service data plane uses the HDA of the LEO satellites and the MEO/GEO relay satellites [91]. These allow the service data plane to transmit with high data rates but require coordination from the operational plane (pointing, booking, etc.).
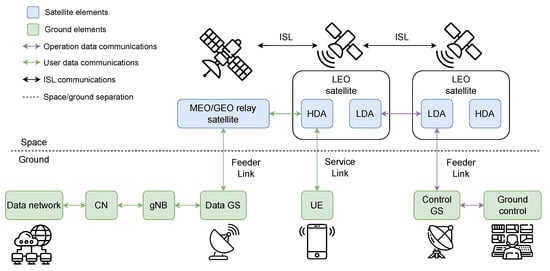
Figure 6.
Persistent connectivity example scenario featuring a multi-layered constellation with separated operations (in purple) and data planes (in green).
Figure 7 presents the control architecture design for persistent connectivity constellations like the example. The system is again only controlled using SatOps interfaces and commands (platform and ground control). Like with the sporadic connectivity architecture, the CMS takes as inputs the operational criteria from both network and satellite operators and generates the SatOps that follow the satellite operator requirements and best align with the network operator’s intents. The platform control works with platform OM as well, and the only change with respect to the sporadic connectivity architecture is that commands focus on the communications system/payload, namely the LDA and HDA antennas. With this, the CMS controls both data planes. As for the ground control, it is mainly composed of the different plane GSs. As such, the CMS coordinates GS passes and tracking to establish and maintain a continuous service data plane with the provided QoS requirements (both for the relay and control satellites). Same as the previous architecture, the CMS receives feedback from the satellites through telemetry and from the ground control to adjust operations accordingly.
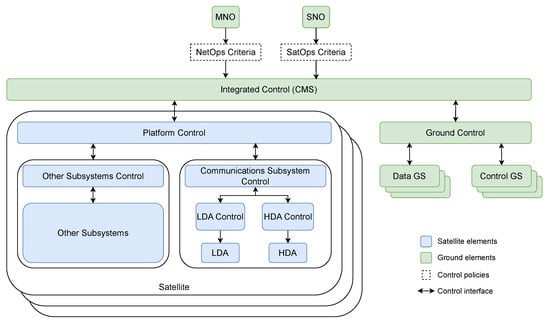
Figure 7.
Control diagram using integrated operations for a persistent connectivity constellation. The CMS manages both LDA for operational control and HDA for service data transmission. Platform control coordinates satellite OM for communications subsystem management, while ground control manages multiple GS types for different data/control planes. The architecture separates operational control (using LDA) from high-throughput data services (using HDA), enabling continuous service provision. Control flows maintain traditional satellite operational interfaces while supporting network service requirements.
4.2. Coordinated Operations
This control architecture is designed for persistent connectivity scenarios since it relies on SDN-enabled networks and NFV. This network softwarization is designed for highly connected terrestrial networks and adapted to NTN. The framework designed to manage and orchestrate these VNF is the MANO. The coordinated operations architecture assumes current state-of-the-art MANO, currently not adapted to NTN. The scenario used to describe the coordinated adaptive operations architectures is depicted in Figure 8, featuring a LEO satellite mega-constellation with regenerative payload that offers direct-to-handset connectivity.
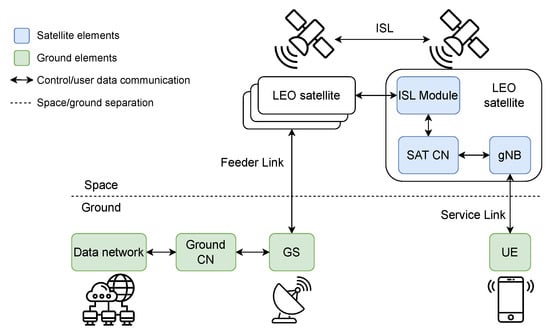
Figure 8.
Persistent connectivity scenario featuring a LEO satellite megaconstellation.
Figure 9 presents the coordinated operations control architecture for a persistent connectivity use cases like the one presented. Both SatOps and NetOps are coordinated by the CMS. They are executed not only using SatOps interfaces and agents, but also using the NetOps interfaces and MANO from the network operator. The control flow using this architecture starts by the MNO providing the NetOps intent rules to the CMS using the standard OSS interface. Then, the CMS generates a task plan required for the MNO intent and aligns with the SatOps criteria of the SNO. The plan is then converted to: (1) satellite OM plans, (2) ground control commands, and (3) MANO inputs. The satellite OM plan and ground control commands will prepare the system for the MANO to execute its actions based on the adapted input from the CMS. This CMS-MANO interface is the same as the standard OSS. The MANO then interacts directly with the SDN controller and VIM onboard the satellite.
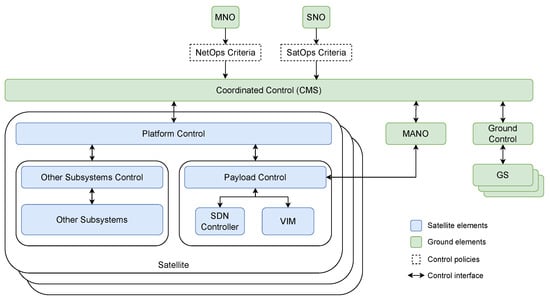
Figure 9.
Control diagram using coordinated operations for a persistent connectivity constellation. The CMS coordinates both SatOps and NetOps through separate but synchronized channels. SatOps control manages satellite OM and GS operations using traditional satellite interfaces. NetOps control operates through MANO systems that interface with onboard SDN controllers and VIM. The CMS translates network operator intent into both satellite operational plans and MANO orchestration commands, ensuring coordinated execution across both domains.
4.3. Adaptive Operations
This control architecture is also designed for persistent connectivity scenarios since it relies on SDN-enabled networks and NFV, like the coordinated control case. This architecture assumes that the MANO is an evolved system tailored for NTN with improved autonomy and intelligence. This orchestration framework, named NTN-MANO, can efficiently adapt NetOps to SatOps constraints.
Figure 10 presents the adaptive operations control architecture for persistent connectivity use cases like the one presented in the previous architecture. As can be seen, the CMS does not coordinate both SatOps and NetOps in this architecture. NetOps is directly coordinated by the NTN-MANO. However, the SatOps and NetOps are adapted to each other using the interface between the CMS and the NTN-MANO. The control flow using this architecture starts by the MNO providing NetOps intent rules to the NTN-MANO using the OSS/BSS interface. Then, the NTN-MANO communicates these intent rules to the CMS using its shared interface. The CMS generates the plan to execute the NetOps intent as best as possible, while staying aligned with the SNO SatOps criteria. The CMS then communicates the SatOps to the NTN-MANO using the shared interface. Finally, the NTN-MANO generates the NetOps considering the SatOps.
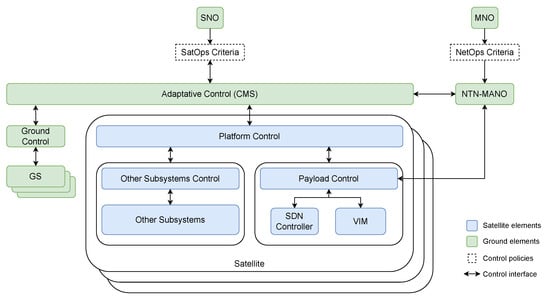
Figure 10.
Control diagram using adaptive operations for a persistent connectivity constellation. Unlike coordinated operations, this architecture features an evolved NTN-MANO with enhanced autonomy and intelligence. The CMS manages SatOps including satellite OM and GS control, while the NTN-MANO independently manages NetOps through onboard SDN controllers and VIM. The two systems adapt to each other through a bidirectional interface that exchanges operational constraints and requirements, enabling autonomous optimization of both satellite operations and network orchestration while maintaining operational coherence.
The execution of the operations is the same as in last architecture. The CMS commands the platform OMs and the ground control, while the NTN-MANO commands the SDN controller and the VIM onboard the satellite as part of its payload. In this architecture, the CMS receives feedback from the ground control and satellite platform through telemetry, and the NTN-MANO receives feedback directly from the payload’s SDN controller.
4.4. Inter-Operator Coordination Mechanisms
The proposed architectures are specifically designed to accommodate multi-stakeholder scenarios involving multiple SNOs and MNOs, each with distinct operational requirements and business objectives. The CMS framework facilitates coordination among these diverse operators through several key mechanisms that ensure efficient resource utilization while respecting individual operator constraints and priorities.
In integrated operations architectures, the CMS serves as a neutral coordination entity that aggregates operational criteria from multiple SNOs and MNOs through standardized interfaces. The multi-objective optimization engine within the scheduler module enables simultaneous consideration of different operator priorities, using weighted optimization functions that can be configured to balance competing requirements. For example, multiple MNOs sharing satellite capacity can specify their respective QoS requirements and service priorities, while multiple SNOs can define their satellite resource constraints and operational windows.
The coordinated operations architecture extends this capability by enabling multiple MANO systems from different MNOs to coordinate with the CMS while maintaining their individual network policies and orchestration strategies. This allows for scenarios where constellation resources are shared among multiple mobile network operators, each maintaining their own network management systems while coordinating satellite operations through the unified CMS framework.
In adaptive operations architectures, the CMS interfaces with multiple NTN-MANO systems, enabling dynamic coordination between various operator domains. The bidirectional communication interface allows different operators to share operational constraints and requirements while maintaining operational autonomy. This mechanism supports complex scenarios such as multi-operator constellation sharing, cross-constellation handovers, and coordinated spectrum utilization.
5. Framework Evaluation
This section provides an evaluation of the proposed task-scheduling framework, the CMS, and its supporting architectures. The evaluation is organized around identifying key features of the framework and examining how each feature addresses the main challenges identified in Section 2. Each subsection focuses on one specific feature, detailing how it is enabled in the framework and architectures, and mapping it to the challenges it aims to resolve. This evaluation process is summarized in two tables: Table 7, which identifies the key features of the framework and its associated architectures, and Table 8, which shows how each feature addresses the corresponding challenges. By establishing these connections, the evaluation demonstrates how the proposed framework effectively tackles existing limitations and advances the field of integrated network operations.
Table 7.
Identified features of the CMS framework and its architectures.
Table 8.
Challenges in CMS management.
5.1. MANO Integration
The coordinated and adaptive operations architectures integrate the CMS framework with MANO through standard OSS interfaces. Addressing the infrastructure and architecture challenges, this integration enables distributed core functionality deployments and SDN control by incorporating an SDN controller within the satellites, managed by MANO. From the perspective of integrated management challenges, this approach enables the seamless inclusion of satellite operations within broader network management. This is particularly evident in the adaptive architecture, where the NTN MANO leverages CMS data on upcoming satellite operations for optimized orchestration. Regarding operational dynamics challenges, the distributed SDN control mechanism effectively addresses key issues such as dynamic space routing, traffic offloading, unstable link management, and the deployment and maintenance of pVNF. Finally, in tackling technology maturation and deployment challenges, the integration of MANO within the framework using standardized and widely adopted interfaces enhances prototyping and real-world implementation. This is especially significant in the coordinated operations architecture, where a standard terrestrial MANO is employed, ensuring compatibility with existing network management practices.
5.2. Aggregating/Dispatching Modules
The CMS is designed as a general scheduling framework, enabling its operation in heterogeneous environments. This adaptability is achieved through its modular design, which includes aggregation modules for collecting input data and dispatching modules for distributing operational information to relevant system agents (e.g., SNOs and GSNs). Additionally, all proposed architectures support this flexibility by providing the necessary data aggregation and dissemination interfaces. From the infrastructure and architecture challenges perspective, this design supports highly heterogeneous network architectures, such as integrated NTN-TN networks. Moreover, it allows for a hybrid approach that combines centralized and decentralized components, enhancing both the robustness and efficiency of the overall system. Regarding integrated management challenges, these modules improve adaptive scheduling by centralizing feedback from various system agents and dynamically adjusting schedules accordingly. Furthermore, they enable comprehensive end-to-end scheduling by directly delivering operational plans to each segment, including the network, ground segment, and satellites. Finally, in addressing technology maturation and deployment challenges, these modules allow for prototyping and testing in real heterogeneous environments, such as NTNs. This is achieved by leveraging existing interfaces for aggregating and distributing operational data, ensuring compatibility with current systems, and easing integration into operational deployments.
5.3. 3GPP Constraints
The CMS framework incorporates 3GPP-specific procedural constraints within its scheduling engine, ensuring compliance with standardized network operations. From the perspective of infrastructure and architecture challenges, this capability facilitates the deployment of distributed core functions on satellites. For instance, authentication procedures, which require special considerations in discontinuous connectivity scenarios, can be effectively managed within this framework. Regarding integrated management challenges, modeling 3GPP handover procedures within the scheduling engine enhances mobility management by improving coordination between network and satellite operations. Additionally, this approach integrates network operations into the traditionally task-oriented paradigm of satellite scheduling, enabling seamless orchestration of 3GPP procedures as scheduled tasks. Finally, incorporating 3GPP constraints into the scheduling framework in addressing operational dynamics challenges supports dynamic space routing. The framework enhances decision making in dynamic and rapidly changing network topology environments by leveraging handover information and related network data.
5.4. Open Source Solutions
The CMS framework and its associated architectures are implemented using open-source solutions, standard interfaces, and industry best practices. This design choice ensures the framework remains general and easily integrated with existing systems. From the interoperability and standardization challenges perspective, using open solutions provides an extensible and non-proprietary alternative for the sector. This addresses the lack of open frameworks and a common standard in the field. Similarly, in tackling technology maturation and deployment challenges, the framework mitigates the issue of the current absence of a unified operations platform for general and practical applications. Adhering to open standards facilitates broader adoption, prototyping, and real-world deployment.
5.5. Unified Control
Unified control in the CMS framework centralizes all operational aspects, applying to both the integrated and coordinated operations architectures while excluding the adaptive operations architecture, where operational control is shared with an NTN MANO. From the perspective of infrastructure and architecture challenges, this unified control approach effectively addresses the complexities of heterogeneous architectures. It also enables a hybrid management strategy, incorporating satellite-distributed control and centralized coordination. Regarding integrated management challenges, the framework enables mixed scheduling by supporting both centralized and distributed scheduling within the satellites. This flexibility is absent in the adaptive architecture, where MANO follows a strictly centralized paradigm. Additionally, in the integrated and coordinated operations architectures, the presence of a unified control entity improves the seamless integration of network operational aspects into satellite operations. Finally, unified control directly tackles the multi-customer nature of NTN scenarios in addressing operational dynamics challenges by balancing varying priorities within the CMS framework. This ensures efficient resource allocation and service differentiation across diverse user requirements.
5.6. Generalized Framework
The CMS framework is designed to be mission-agnostic, serving as a general and transversal tool for all SNOs. To achieve this, it employs task scheduling as its operational approach, incorporates standard interfaces, and features a modular and flexible architecture. Additionally, it utilizes a constraint satisfaction programming engine to model diverse scenarios, ensuring adaptability across different missions and operational contexts. From the perspective of infrastructure and architecture challenges, this approach effectively addresses system and scenario heterogeneity while supporting a hybrid architecture that maximizes operational efficiency. Regarding interoperability and standardization challenges, the framework directly tackles the mission-specific nature of existing tools and the absence of a common standard for integrated operations. For integrated management challenges, the framework facilitates end-to-end scheduling by accommodating the operational requirements of various heterogeneous system agents and ensuring coordinated task execution across them. In addressing operational dynamics challenges, the CMS framework effectively supports the multi-customer nature of NTNs by integrating multiple operators within a unified scheduling system. Finally, in the context of technology maturation and deployment challenges, the framework overcomes the lack of a general-purpose solution for integrated NTN operations, providing a standardized approach to coordinated network and satellite management.
5.7. Autonomous Operation
The CMS framework, along with the integrated and coordinated operations architectures, is designed to operate autonomously with minimal human intervention. This autonomy is essential for ensuring the scalability of operational scenarios, reducing the costs associated with NTN management, and improving overall system efficiency. The adaptive architecture, however, cannot be considered fully autonomous, as operational control is shared with the NTN MANO, whose level of autonomy falls outside the framework’s scope. From the perspective of infrastructure and architecture challenges, autonomy enables the implementation of a hybrid architecture, as distributed operations fundamentally require autonomous capabilities for effective execution. Regarding interoperability and standardization challenges, the framework addresses the reliance of existing satellite and network management tools on semi-manual operations and human supervision. By integrating both domains within a single autonomous system, the CMS enhances the automation of operations. For integrated management challenges, the framework addresses the mixed scheduling challenge by enabling a combination of distributed scheduling onboard satellites and centralized master scheduling from the ground. Additionally, it mitigates scenario uncertainty by enabling real-time reactions to dynamic conditions, as continuous monitoring and autonomous response are key to handling unpredictable events. This is closely related to the adaptive scheduling challenge, where an autonomous system can continuously integrate real-time telemetry and system updates for ongoing in-loop optimization. Finally, regarding the operational dynamics challenge, this autonomy directly tackles traffic offloading and unstable link management challenges by reacting to real-time system changes, ensuring efficient resource management, and maintaining system stability under dynamic conditions.
5.8. AI/ML Algorithms
The CMS employs AI and ML algorithms in three primary roles: scheduling optimization through constraint satisfaction, resource allocation prediction using historical data patterns, and real-time adaptation through dynamic scenario analysis, playing a key role in addressing integrated management challenges. This is particularly critical in the context of NTNs, where resource constraints require efficient utilization of onboard resources, radio resources, and contact resources. Optimizing these components is essential for ensuring system performance and reliability. AI/ML techniques are particularly well-suited for tackling the mixed scheduling challenge through predictive task allocation algorithms and constraint optimization heuristics. Given the computational limitations of satellites, ML-based approaches enable efficient distributed operations by implementing a ground-train/space-inference architecture. A key advantage is the ability to train complex scheduling models on ground-based systems with abundant computational resources and deploy only lightweight inference engines onboard satellites, significantly reducing the computational burden on spaceborne systems while maintaining optimization effectiveness. Additionally, these algorithms help mitigate uncertainties in dynamic environments by training predictive models capable of smoothing fluctuations and deviations. This is crucial for addressing the uncertain scenario challenge of NTNs, as AI/ML techniques enhance the system’s ability to anticipate and adapt to changing conditions. Regarding operational dynamics, AI/ML-based solutions improve space routing and traffic offloading by predicting future network states and optimizing resource distribution accordingly. Furthermore, AI-driven profiling employs machine-learning techniques such as time-series analysis and pattern recognition on historical operational data to enable more accurate forecasting of resource availability, both onboard satellites and within the broader NTN ecosystem. The system can enhance network efficiency, adaptability, and resilience by leveraging these techniques.
5.9. Closed-Loop Optimization
All the proposed architectures and the CMS framework promote closed-loop optimization by integrating system feedback and telemetry. This enables autonomous monitoring of deviations from the original plan and dynamic rescheduling when necessary. Such an approach significantly enhances system autonomy, eliminating the need for constant supervision, as the system can self-correct in response to newly available information. This paradigm directly addresses the challenges of uncertainty and adaptive scheduling by enabling rapid responses to unpredictable events and deviations. Furthermore, it ensures continuous adaptation by incorporating updated information, allowing the system to refine and optimize real-time schedules without a human operator’s intervention.
5.10. Constraint Satisfaction Programming
The core scheduling engine is built on CSP, which provides significant flexibility in solving optimization problems. Unlike other formulations (e.g., linear programming), CSP is not restricted by specific solver limitations, allowing for the modeling of complex constraints. This capability makes it particularly effective in addressing integrated management challenges since CSP enables the representation of intricate constraints in mobility management, such as handovers and scenario uncertainty. Additionally, it enables the simultaneous modeling of network constraints and optimization criteria alongside satellite operations constraints and optimization functions, supporting a truly integrated operations model. Finally, within the domain of operational dynamics, CSP is useful in handling constraints related to space routing, providing key information to routing algorithms such as node availability.
5.11. Multi-Objective Optimization
The scheduling optimization problem is formulated as a MOO, which is solved using a combination of lexicographic and weighted sum approaches. This hybrid method enables operators to balance multiple optimization criteria by assigning hierarchical priorities (lexicographic approach) and adjustable weights (weighted sum approach). Incorporating diverse objective functions is particularly crucial in the heterogeneous environment of NTNs. This approach directly addresses the challenge of mission-specific solutions by providing the flexibility to model various scenarios with different objective function combinations. Additionally, it enhances resource management by allowing operators to prioritize constrained resources based on specific optimization goals. Furthermore, the MOO paradigm supports multi-customer service provisioning by accommodating diverse quality-of-service requirements and operational constraints. This adaptability makes it a robust and scalable solution for addressing the diversity of NTN scenarios.
5.12. Network Topology Prediction
The proposed framework provides a global view of the NTN system by integrating satellite and network operations. Combined with a satellite operations simulator and orbit propagation models, this enables the CMS to predict the network topology effectively. This capability is crucial for addressing integrated management challenges, such as mobility management, resource management, and uncertainty mitigation. A global understanding of network topology also enables the seamless integration of network operations into satellite operations and vice versa. This exchange of information provides MANO with critical insights into the future states of spaceborne nodes and resources. Regarding operational dynamics challenges, accurate network topology predictions are key in optimizing space routing algorithms. They also support SDN controllers in addressing traffic offloading and unstable link challenges while enabling the efficient deployment and maintenance of VNFs.
5.13. Prototype Readiness and SNO Integration
The CMS is prototype-ready and implemented in an integrated architecture. The framework alongside this architecture will be tested in a CubeSat mission in 2025 to validate its implementation and value in a real space mission. The expected timeline for initiating these validation tests is between Q4-2025 and Q1-2026. The details of the mission and the designed tests are published in [92]. Additionally, the CMS will be further validated in the 6GStarLab CubeSat mission, scheduled to begin in 2026 [93]. The CMS interface with SNOs is essential for every satellite mission. For those missions, this interface is based on the satellite’s OM, which serves as the common language between the CMS and the operator. This directly tackles all the identified technology maturation and deployment challenges, providing a real implementation of an integrated operations framework ready for space testing in a satellite mission.
5.14. Framework Validation and Performance Analysis
The CMS framework has been validated through simulation studies using a prototype implementation tested against traditional satellite scheduling approaches. The validation employed a 16-satellite LEO constellation scenario based on real-world parameters, comparing the CMS against a baseline semi-manual operator using best-effort scheduling without business criteria optimization. This section summarizes the obtained results in this validation, reported with more detailed in [90].
The validation tested two primary constraint scenarios: (1) contact time-constrained scenarios with varying user loads (57,636 to 172,909 users), and (2) memory-constrained scenarios with different onboard capacity limitations (5–20 MB reserved memory). Performance metrics included task completion rates, data throughput, latency optimization, and priority task management across multiple resource saturation levels. The CMS demonstrated the following substantial performance improvements in the tested scenario:
- Task Assignment and Completion: The CMS achieved task completion improvements of 17.87% for moderate loads (57,636 users) and 44.02% for high loads (115,273 users) compared to the baseline approach. Even under heavily saturated conditions (172,909 users), the CMS maintained priority task allocation capabilities that the baseline could not achieve.
- Throughput Optimization: Data throughput improvements ranged from 25.09% to 93.62% depending on task type and scenario constraints. The CMS consistently achieved equal or superior throughput compared to manual approaches across all tested configurations, with the most significant improvements observed in MTDL under resource-constrained conditions.
- Priority Management: The CMS demonstrated effective business criteria integration, achieving 20.14% better high-priority task completion rates in moderate load scenarios and up to 32.78% improvement in severely memory-constrained environments (5 MB reserved capacity). The framework successfully prioritized high-priority tasks over low-priority ones, while baseline approaches showed no consistent prioritization capability.
- Resource Efficiency: Under memory constraints, the CMS maintained superior performance across all tested capacity levels, with task completion rates of 89.05% (20 MB), 86.09% (15 MB), 81.66% (10 MB), and 42.9% (5 MB) compared to baseline rates of 76.92%, 75.62%, 70.35%, and 34.14%, respectively.
- Scalability and Computational Performance: Initial scalability analysis demonstrates the CMS framework’s computational characteristics across different constellation sizes. For single satellite operations, the framework achieves 54,881 scores per second with 765,692 optimization steps. When scaling to 12 satellites (95 contacts), performance reaches 22,766 scores per second (41.48% relative performance) with 383,130 optimization steps (50.04% relative). For larger constellations of 48 satellites (380 contacts), the system achieves 3,877 scores per second (7.06% relative) with 37,118 optimization steps (4.85% relative). At 144 satellites (1120 contacts), performance reaches 1045 scores per second (1.90% relative) with 12,861 optimization steps (1.68% relative). Computational efficiency scales with available processing cores, showing 135.19% performance improvement with 2 cores, 149.01% with 3 cores, and 187.61% with 4 cores compared to single-core execution.
The CMS scheduling optimization operates within practical time constraints, with algorithm termination criteria set to five minutes maximum duration and one minute without score improvement. The hierarchical constraint satisfaction approach ensures feasible solutions are found quickly through construction heuristics, while local search refinement provides optimized results within acceptable computational overhead for operational deployment. These validation results demonstrate the CMS framework’s effectiveness in bridging satellite and network operations while providing measurable performance improvements over traditional approaches, confirming its suitability for practical NTN deployment scenarios.
6. Conclusions
This paper has proposed a novel framework to integrate satellite operations and network management within NTNs. Achieving effective integration across these traditionally separate operational domains is critical to realizing the ambitious goals of future global networks, such as 6G. The framework developed, the CMS, facilitates this integration by providing a unified, task-driven approach to managing the operational demands of satellite constellations and terrestrial networks. The CMS is designed as a flexible task-scheduling system that centralizes operational control. It uses optimization scheduling algorithms to allocate resources effectively while accommodating satellite-specific constraints, network service requirements, and QoS metrics. The modular design of the CMS supports extensions for SDN-enabled systems and future automated MANO integration.
This framework proposes three distinct novel architectures for SatOps-NetOps interaction, each suited to different levels of operational integration and network scenarios. These CMS-based architectures address key challenges in satellite and network interoperability, infrastructure management, operational dynamics, and technology deployment, providing tailored solutions for various network requirements and enhancing the overall management of integrated satellite and network operations.
The practical deployment and widespread adoption of the CMS framework requires consideration of standardization pathways that can facilitate industry-wide implementation. Several routes present viable opportunities for CMS integration into existing operational frameworks. The 3GPP represents the most direct pathway, given its ongoing NTN integration work through Releases 17-19, where the CMS task-scheduling approach could be incorporated as a normative framework for satellite operations management in future releases. The CCSDS offers another pathway for the satellite operations aspects, particularly given its established expertise in satellite mission planning standards and the CMS framework’s extension of traditional CCSDS methodologies to incorporate network operations criteria.
The initial scalability analysis presented in this work demonstrates computational performance characteristics up to 144 satellites. However, this analysis represents a limited scope compared to the mega-constellation scenarios envisioned for future 6G networks. Future work must address a broader scalability validation through large-scale testing, distributed CMS architectures, and optimization algorithm improvements to maintain acceptable performance for mega-constellation operations. Additionally, detailed communication overhead analysis and real-world deployment validation are required to fully characterize the framework’s operational feasibility at scale.
The current CMS implementation has been validated primarily through simulation and theoretical analysis, outperforming traditional satellite task-scheduling approaches in terms of task assignment and completion, throughput, priority management, and resource efficiency. However this validations incorporate limited real-world operational data to fully characterize performance under actual space mission conditions. Immediate validation efforts include real space mission testing of the CMS framework in two separate CubeSat missions scheduled for late 2025 and 2026, which will provide critical operational data and validate the framework’s performance in actual space environments.
Future technical developments should explore advanced ML integration into the CMS optimization process, including RL for dynamic constraint satisfaction and federated-learning approaches for multi-operator coordination. Furthermore, research into hybrid distributed agent-based architectures would address mega-constellation scalability by enabling satellite clusters to operate as intelligent agents while maintaining centralized coordination, combining global optimization benefits with distributed system resilience.
This paper’s contributions extend beyond technical integration; they establish a robust foundation for unified network management in NTN environments, paving the way for a cohesive operational ecosystem between satellite and terrestrial networks. By providing a scalable, modular solution that addresses the complexities of resource distribution, coordination across heterogeneous systems, and responsiveness to real-time network demands, the CMS framework contributes to the evolution of global connectivity. This work not only supports the immediate operational needs of satellite and terrestrial networks but also sets the stage for a seamless transition to next-generation networks, where dynamic and integrated management will be essential.
Author Contributions
Conceptualization, A.S., J.A.F., A.C. and J.A.R.-d.-A.; methodology, A.S., J.A.F., A.C. and J.A.R.-d.-A.; software, A.S. and F.C.; validation, A.S.; formal analysis, A.S.; investigation, A.S.; resources, A.S.; data curation, A.S.; writing—original draft preparation, A.S. and F.C.; writing—review and editing, D.C., J.A.F., A.C. and J.A.R.-d.-A.; visualization, A.S.; supervision, J.A.F., A.C. and J.A.R.-d.-A.; project administration, J.A.R.-d.-A.; funding acquisition, D.C., A.C. and J.A.R.-d.-A. All authors have read and agreed to the published version of the manuscript.
Funding
This work has been funded by the Government of Catalonia in the scope of the NewSpace Strategy for Catalonia. Additionally, this work was funded by the Spanish Ministry of Economic Affairs and Digital Transformation and the European Union–NextGeneration EU, in the framework of the Recovery Plan, Transformation and Resilience (PRTR) (Call UNICO I+D 5G 2021, ref. number TSI-063000-2021-1-6GSatNet-GS). Also funded with ETHER by the EU’s Horizon Europe program with GA Nº101096526. This research was also funded in part by the Spanish MCIN/AEI/ 10.13039/501100011033 through project PID2023-146378NB-I00, and by Secretaria d’Universitats i Recerca del departament d’Empresa i Coneixement de la Generalitat de Catalunya with the grant number 2021 SGR 00330. This paper is also part of the Grant 6G-DIFERENTE (CER-20231018) funded by CDTI and by the European Union NextGenerationEU/PRTR within the call “Ayudas Cervera para Centros Tecnológicos 2023.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| 3GPP | Third Generation Partnership Project |
| 5G | 5th Generation |
| 6G | 6th Generation |
| AAS | American Astronautical Society |
| AI | Artificial Intelligence |
| AIAA | American Institute of Aeronautics and Astronautics |
| AoI | Area of Interest |
| API | Application Programming Interface |
| APS | Acquisition Planning System |
| APSI | Advanced Planning and Scheduling Initiative |
| AR | Attach Request |
| ASPEN | Automated Planning/Scheduling Environment |
| AV | Authentication Vectors |
| AVSI | Authentication Vectors and Subscriber Information |
| BSS | Business Support Systems |
| CCSDS | Consultative Committee for Space Data Systems |
| CDL | Context Download |
| CH | Construction Heuristics |
| CGR | Contact Graph Routing |
| CMS | Constellation Management System |
| CN | Core Network |
| COTS | Commercially Off-The-Shelf |
| CSP | Constrained Satisfaction Programming |
| CUL | Context Upload |
| D-SpaCPlanS | Distributed Spacecraft Coordination Planning and Scheduling |
| DADSSP | Data Acquisition and Download Scheduling Satellite Problem |
| DAI | Distributed Artificial Intelligence |
| DB | Database |
| DoD | Depth of Discharge |
| DRL | Deep Reinforcement Learning |
| DTN | Delay-Tolerant Network |
| DSN | Deep Space Network |
| eNB | evolved Node-B |
| EO | Earth Observation |
| ESA | European Space Agency |
| EUROPA | Extensible Universal Remote Operations Planning Architecture |
| FIFO | First In First Out |
| FoV | Field of View |
| GA | Genetic Algorithm |
| GAS | Ground-Air-Space |
| GEO | Geosynchronous Equatorial Orbit |
| GMAT | General Mission Analysis Tool |
| gNB | Next Generation Node-B |
| GPS | Global Positioning System |
| GS | Ground Station |
| GSA | Ground Station Aggregator |
| GSN | Ground Station Network |
| GSOC | German Space Operations Center |
| HAPS | High-Altitude Platform Systems |
| HCC | High-Connectivity Constellations |
| HDA | High-Directivity Antenna |
| HTN | Hierarchical Task Network |
| IEC | International Electrotechnical Commission |
| IMSI | International Mobile Subscriber Identity |
| IoT | Internet of Things |
| IP | Internet Protocol |
| ISL | Inter-Satellite Links |
| ITU | International Telecommunication Union |
| KPI | Key Performance Indicator |
| LCC | Low-Connectivity Constellations |
| LDA | Low-Directivity Antenna |
| LEO | Low Earth Orbit |
| LS | Local Search |
| M2M | Machine-to-Machine |
| MANO | Management and Orchestration |
| MBR | Maximum Bit Rate |
| MEO | Medium Earth Orbit |
| MILP | Mixed Integer Linear Programming |
| ML | Machine Learning |
| mMTC | Massive Machine Type Communications |
| MME | Mobility Management Entity |
| MNO | Mobile Network Operator |
| MO | Mobile Originated |
| MODL | Mobile Originated Download |
| MOO | Multi-Objective Optimization |
| MOUL | Mobile Originated Upload |
| MP | Mission Provider |
| MPA | Mission Provider Aggregator |
| MPS | Mission Planning System |
| MT | Mobile Terminated |
| MTDL | Mobile Terminated Download |
| MTUL | Mobile Terminated Upload |
| NAS | Non-Access Stratum |
| NASA | National Aeronautics and Space Administration |
| NB | Narrow-Band |
| NB-IoT | Narrow-Band Internet of Things |
| NCCT | Nanosatellite Communication Constellation Testbed |
| NetOps | Network Operations |
| NFV | Network Function Virtualization |
| NR | New Radio |
| NTN | Non-Terrestrial Networks |
| OM | Operational Mode |
| OSM | Open Source MANO |
| OSS | Operations Support Systems |
| PE | Plan Executor |
| PSL | Pending Subscriber List |
| QoS | Quality of Service |
| RAN | Radio Access Network |
| RL | Reinforcement Learning |
| S&F | Store and Forward |
| SatOps | Satellite Operations |
| SDN | Software-Defined Network |
| SHAI | Stottler Henke Associates, Inc. |
| SNO | Satellite Network Operator |
| SoA | State of the Art |
| SPIFe | Scheduling and Planning Interface for Exploration |
| STEREO | Space-TERrestrial intEgrated IOT |
| STIN | Satellite-Terrestrial Integrated Networks |
| STK | Systems Tool Kit |
| STScI | Space Telescope Science Institute |
| TC | Telecommand |
| TLE | Two-Line Elements |
| TM | Telemetry |
| TN | Terrestrial Network |
| TSG | Technical Specification Group |
| TT&C | Tracking, Telemetry, and Command |
| UAE | United Arab Emirates |
| UAV | Unmanned Aerial Vehicle |
| UE | User Equipment |
| VIM | Virtualized Infrastructure Manager |
| VNF | Virtual Network Function |
| VSAT | Very Small Aperture Terminal |
References
- Kodheli, O.; Lagunas, E.; Maturo, N.; Sharma, S.K.; Shankar, B.; Montoya, J.F.M.; Duncan, J.C.M.; Spano, D.; Chatzinotas, S.; Kisseleff, S.; et al. Satellite Communications in the New Space Era: A Survey and Future Challenges. IEEE Commun. Surv. Tutor. 2021, 23, 70–109. [Google Scholar] [CrossRef]
- Zhang, J.; Cai, Y.; Xue, C.; Xue, Z.; Cai, H. LEO Mega Constellations: Review of Development, Impact, Surveillance, and Governance. Space Sci. Technol. 2022, 2022. [Google Scholar] [CrossRef]
- Kulu, E. Satellite Constellations—2024 Survey, Trends and Economic Sustainability. In Proceedings of the International Astronautical Congress, IAC, Milan, Italy, 14–18 October 2024; pp. 14–18. [Google Scholar]
- Sweeting, M.N. Modern Small Satellites-Changing the Economics of Space. Proc. IEEE 2018, 106, 343–361. [Google Scholar] [CrossRef]
- Curzi, G.; Modenini, D.; Tortora, P. Large Constellations of Small Satellites: A Survey of Near Future Challenges and Missions. Aerospace 2020, 7, 133. [Google Scholar] [CrossRef]
- Liu, S.; Gao, Z.; Wu, Y.; Ng, D.W.K.; Gao, X.; Wong, K.K.; Chatzinotas, S.; Ottersten, B. LEO Satellite Constellations for 5G and Beyond: How Will They Reshape Vertical Domains? IEEE Commun. Mag. 2021, 59, 30–36. [Google Scholar] [CrossRef]
- Kulu, E. Satellite constellations—2021 industry survey and trends. In Proceedings of the Small Satellite Consference, Virtual, 7–12 August 2021. [Google Scholar]
- ITU. Framework and Overall Objectives of the Future Development of IMT for 2030 and Beyond; techreport Recommendation ITU-R M.2160-0; International Telecommunication Union: Geneva, Switzerland, 2023. [Google Scholar]
- Zhu, X.; Jiang, C. Creating Efficient Integrated Satellite-Terrestrial Networks in the 6G Era. IEEE Wirel. Commun. 2022, 29, 154–160. [Google Scholar] [CrossRef]
- Alhammadi, A.; Shayea, I.; El-Saleh, A.A.; Azmi, M.H.; Ismail, Z.H.; Kouhalvandi, L.; Saad, S.A. Artificial Intelligence in 6G Wireless Networks: Oportunities, Applications, and Challenges. Int. J. Intell. Syst. 2024, 2024, 1–27. [Google Scholar] [CrossRef]
- Zhu, X.; Jiang, C. Integrated Satellite-Terrestrial Networks Toward 6G: Architectures, Applications, and Challenges. IEEE Internet Things J. 2022, 9, 437–461. [Google Scholar] [CrossRef]
- Hassan, S.S.; Park, Y.M.; Tun, Y.K.; Saad, W.; Han, Z.; Hong, C.S. Enhancing Spectrum Efficiency in 6G Satellite Networks: A GAIL-Powered Policy Learning via Asynchronous Federated Inverse Reinforcement Learning. arXiv 2024, arXiv:2409.18718. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, S.; Yang, H.; Quek, T.Q. Non-Terrestrial Networking for 6G: Evolution, Opportunities, and Future Directions. Engineering 2025, in press. [CrossRef]
- Majamaa, M. Toward Multi-Connectivity in Beyond 5G Non-Terrestrial Networks: Challenges and Possible Solutions. IEEE Commun. Mag. 2024, 62, 144–150. [Google Scholar] [CrossRef]
- Jamshed, M.A.; Kaushik, A.; Toka, M.; Shin, W.; Shakir, M.Z.; Dash, S.P.; Dardari, D. Synergizing Airborne Non-Terrestrial Networks and Reconfigurable Intelligent Surfaces-Aided 6G IoT. IEEE Internet Things Mag. 2024, 7, 46–52. [Google Scholar] [CrossRef]
- 3rd Generation Partnership Project. 5G NG-RAN General Aspects and Principles (TS 38.410 Release 16); Technical Report, Technical Specification Group; ETSI: Valbonne, France, 2020. [Google Scholar]
- 3rd Generation Partnership Project. Solutions for NR to Support Non-Terrestrial Networks (NTN) (TR 23.737 Release 17); Technical Report, Technical Specification Group; ETSI: Valbonne, France, 2023. [Google Scholar]
- 3rd Generation Partnership Project. Study on Integration of Satellite Componentsin the 5G Architecture: Phase 2 (TR 23.700-28 Release 18); Technical Report, Technical Specification Group; ETSI: Valbonne, France, 2023. [Google Scholar]
- Harounabadi, M.; Heyn, T. Toward Integration of 6G-NTN to Terrestrial Mobile Networks: Research and Standardization Aspects. IEEE Wirel. Commun. 2023, 30, 20–26. [Google Scholar] [CrossRef]
- Khalid, M.; Ali, J.; Roh, B.h. Artificial Intelligence and Machine Learning Technologies for Integration of Terrestrial in Non-Terrestrial Networks. IEEE Internet Things Mag. 2024, 7, 28–33. [Google Scholar] [CrossRef]
- Jiang, W.; Zhan, Y.; Xiao, X.; Sha, G. Network Simulators for Satellite-Terrestrial Integrated Networks: A Survey. IEEE Access 2023, 11, 98269–98292. [Google Scholar] [CrossRef]
- Liu, L.; Li, Y.; Li, H.; Yang, J.; Liu, W.; Lan, J.; Wang, Y.; Li, J.; Wu, J.; Wu, Q.; et al. Democratizing Direct-to-Cell Low Earth Orbit Satellite Networks. In Proceedings of the 21st USENIX Symposium on Networked Systems Design and Implementation (NSDI 24), Santa Clara, CA, USA, 16–18 April 2024; pp. 791–808. [Google Scholar]
- Karavolos, M.; Moraitis, N.; Tsipi, L.; Vouyioukas, D. Enhancing Performance in Hybrid Satellite-Terrestrial Networks: A Novel Joint NOMA-NC Approach. In Proceedings of the GLOBECOM 2024—2024 IEEE Global Communications Conference, Cape Town, South Africa, 8–12 December 2024; IEEE: New York, NY, USA, 2024; pp. 4600–4605. [Google Scholar] [CrossRef]
- Cox, S.; Kost, T.; Fish, D.; Maier, J. Autonomous Multi-Mission Orchestrator for Small Satellite Constellations. In Proceedings of the 38th Annual Small Satellite Conference, Logan, UT, USA, 3–8 August 2024. [Google Scholar]
- Fraire, J.A.; Iova, O.; Valois, F. Space-Terrestrial Integrated Internet of Things: Challenges and Opportunities. IEEE Commun. Mag. 2022, 60, 64–70. [Google Scholar] [CrossRef]
- de Azua, J.A.R.; Calveras, A.; Camps, A. Internet of Satellites (IoSat): Analysis of Network Models and Routing Protocol Requirements. IEEE Access 2018, 6, 20390–20411. [Google Scholar] [CrossRef]
- Sciddurlo, G.; Petrosino, A.; Quadrini, M.; Roseti, C.; Striccoli, D.; Zampognaro, F.; Luglio, M.; Perticaroli, S.; Mosca, A.; Lombardi, F.; et al. Looking at NB-IoT Over LEO Satellite Systems: Design and Evaluation of a Service-Oriented Solution. IEEE Internet Things J. 2022, 9, 14952–14964. [Google Scholar] [CrossRef]
- Sørensen, R.B.; Møller, H.K.; Koch, P. 5G NB-IoT via low density LEO Constellations. In Proceedings of the Small Satellite Conference, Online, 7–12 August 2021. [Google Scholar] [CrossRef]
- Kellermann, T.; Centelles, R.P.; Camps-Mur, D.; Ferrus, R.; Guadalupi, M.; Auge, A.C. Novel Architecture for Cellular IoT in Future Non-Terrestrial Networks: Store and Forward Adaptations for Enabling Discontinuous Feeder Link Operation. IEEE Access 2022, 10, 68922–68936. [Google Scholar] [CrossRef]
- Yoo, P.; Wakayama, C.; Jenkins, A. Nanosatellite Communication Constellation Testbed for Autonomous Scheduling Algorithms to Enable Mission Performance Analysis and Demonstration. In Proceedings of the Small Satellite Conference, Logan, UT, USA, 5–10 August 2017. [Google Scholar]
- Cappaert, J.; Nag, S. Network Control Systems for Large-Scale Constellations. In Handbook of Small Satellites: Technology, Design, Manufacture, Applications, Economics and Regulation; Springer: Cham, Switzerland, 2020; pp. 1–22. [Google Scholar]
- Tirmizi, S.B.R.; Chen, Y.; Lakshminarayana, S.; Feng, W.; Khuwaja, A.A. Hybrid Satellite–Terrestrial Networks toward 6G: Key Technologies and Open Issues. Sensors 2022, 22, 8544. [Google Scholar] [CrossRef] [PubMed]
- Mashiko, K.; Kawamoto, Y.; Kato, N.; Ariyoshi, M.; Sugyo, K.; Funada, J. Efficient Coverage Area Control in Hybrid FSO/RF Space-Air-Ground Integrated Networks. In Proceedings of the GLOBECOM 2024—2024 IEEE Global Communications Conference, Cape Town, South Africa, 8–12 December 2024; IEEE: New York, NY, USA, 2024; pp. 5162–5167. [Google Scholar] [CrossRef]
- Sheemar, C.K.; Thiruvasagam, P.; Khan, W.U.; Solanki, S.; Alexandropoulos, G.C.; Querol, J.; Plachy, J.; Holschke, O.; Chatzinotas, S. Joint Communications and Sensing for 6G Satellite Networks: Use Cases and Challenges. arXiv 2025, arXiv:2501.05243. [Google Scholar] [CrossRef]
- Conti, F.; Eugeni, M.; Bove, M.; Marzioli, P.; Marini, L.; Pasquali, M.; Schiavon, E.; Nguyen Xuan, A.; Tornato, A.; Geraldini, S.; et al. A model-based approach for the preliminary design of the SAR upstream element for the Italian IRIDE EO constellation based on users’ demand. CEAS Space J. 2024, 17, 431–453. [Google Scholar] [CrossRef]
- Sun, Y.; Peng, M.; Zhang, S.; Lin, G.; Zhang, P. Integrated Satellite-Terrestrial Networks: Architectures, Key Techniques, and Experimental Progress. IEEE Netw. 2022, 36, 191–198. [Google Scholar] [CrossRef]
- Li, D.; Wu, S.; Jiao, J.; Zhang, N.; Zhang, Q. Age-Aware Task Scheduling Scheme in Hybrid GEO-LEO Satellite Networks. In Proceedings of the GLOBECOM 2022—2022 IEEE Global Communications Conference, Online, 4–8 December 2022. [Google Scholar] [CrossRef]
- Li, X.; Yang, J.; Fan, H. Dynamic Network Resource Autonomy Management and Task Scheduling Method. Mathematics 2023, 11, 1232. [Google Scholar] [CrossRef]
- CCSDS. Mission Planning and Scheduling; techreport CCSDS 529.0-G-1; The Consultative Commitee for Space Data Systems: Washington, DC, USA, 2018. [Google Scholar]
- Steel, R.; Niézette, M.; Cesta, A.; Fratini, S.; Oddi, A.; Cortellessa, G.; Rasconi, R.; Verfaillie, G.; Pralet, C.; Lavagna, M.; et al. Advanced Planning and Scheduling Initiative MrSpock Aims for Xmas. Language 2009, 1050, 3. [Google Scholar]
- Fukunaga, A.; Rabideau, G.; Chien, S.; Yan, D. Aspen: A framework for automated planning and scheduling of spacecraft control and operations. In Proceedings of the International Symposium on AI, Robotics and Automation in Space, Tokyo, Japan, 14–16 July 1997; pp. 181–187. [Google Scholar]
- Barreiro, J.; Boyce, M.; Do, M.; Frank, J.; Iatauro, M.; Kichkaylo, T.; Morris, P.; Ong, J.; Remolina, E.; Smith, T.; et al. EUROPA: A platform for AI planning, scheduling, constraint programming, and optimization. In Proceedings of the 4th International Competition on Knowledge Engineering for Planning and Scheduling (ICKEPS), Sao Paulo, Brazil, 25–29 June 2012. [Google Scholar]
- Aghevli, A.; Bencomo, A.; McCurdy, M. Scheduling and planning interface for exploration (spife). In Proceedings of the International Conference on Automated Planning & Scheduling, Freiburg, Germany, 11–16 June 2011. [Google Scholar]
- Nibler, R.; Hartung, J.; Krenss, J.; Fürbacher, A.; Mrowka, F.; Brogl, S. PINTA—One Tool to Plan Them All. In Space Operations; Springer: Cham, Switzerland, 2022; pp. 345–379. [Google Scholar]
- Lenzen, C. The algorithm assembly set of plato. In Proceedings of the SpaceOps 2012, Stockholm, Sweden, 11–15 June 2012; p. 1255731. [Google Scholar]
- Calvani, H.; Berman, A.; Blair, W.; Caplingera, J.; Englanda, M.; Roberts, B.; Hawkins, R.; Ferdous, N.; Krueger, T. The Evolution of the FUSE Spike Long Range Planning System. In Proceedings of the 4th International Workshop on Planning and Scheduling for Space, Darmstadt, Germany, 23–25 June 2004; pp. 25–31. [Google Scholar]
- Pratt, S.R.; Raines, R.A.; Fossa, C.E.; Temple, M.A. An operational and performance overview of the IRIDIUM low earth orbit satellite system. IEEE Commun. Surv. Tutor. 1999, 2, 2–10. [Google Scholar] [CrossRef]
- Eichler, P.; Teichwart, M.; Schön, A.; Khanina, E. Deployment of EUTELSAT’s New Generation Constellation Control System (Neo). In Proceedings of the Space OPS 2004 Conference, Montreal, QC, Canada, 17–21 May 2004; p. 160. [Google Scholar]
- Chamoun, J.P.; Risner, S.; Beech, T.; Garcia, G. Bridging ESA and NASA Worlds: Lessons Learned from the Integration of hifly®/SCOS-2000 in NASA’s GMSEC. In Proceedings of the 2006 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2006. [Google Scholar] [CrossRef]
- Rigo, C.A.; Seman, L.O.; Camponogara, E.; Filho, E.M.; Bezerra, E.A. Task scheduling for optimal power management and quality-of-service assurance in CubeSats. Acta Astronaut. 2021, 179, 550–560. [Google Scholar] [CrossRef]
- Rigo, C.A.; Seman, L.O.; Camponogara, E.; Morsch Filho, E.; Bezerra, E.A. A nanosatellite task scheduling framework to improve mission value using fuzzy constraints. Expert Syst. Appl. 2021, 175, 114784. [Google Scholar] [CrossRef]
- Camponogara, E.; Seman, L.O.; Rigo, C.A.; Morsch Filho, E.; Ribeiro, B.F.; Bezerra, E.A. A continuous-time formulation for optimal task scheduling and quality-of-service assurance in nanosatellites. Comput. Oper. Res. 2022, 147, 105945. [Google Scholar] [CrossRef]
- Pinto, M.J.; Barros, A.I.; Noomen, R.; van Gelder, P.H.; Tessensohn, T.L. A new model proposal for integrated satellite constellation scheduling within a planning horizon given operational constraints. In Proceedings of the ICORES 2018, Funchal, Portugal, 24–26 January 2018; pp. 312–319. [Google Scholar]
- Cho, D.H.; Kim, J.H.; Choi, H.L.; Ahn, J. Optimization-Based Scheduling Method for Agile Earth-Observing Satellite Constellation. J. Aerosp. Inf. Syst. 2018, 15, 611–626. [Google Scholar] [CrossRef]
- Fan, H.; Yang, Z.; Zhang, X.; Wu, S.; Long, J.; Liu, L. A novel multi-satellite and multi-task scheduling method based on task network graph aggregation. Expert Syst. Appl. 2022, 205, 117565. [Google Scholar] [CrossRef]
- Li, S.; Yu, Q.; Ding, H. Reviews and prospects in satellite range scheduling problem. Auton. Intell. Syst. 2023, 3, 9. [Google Scholar] [CrossRef]
- Das, S.; Wu, C.; Truszkowski, W. Enhanced satellite constellation operations via distributed planning and scheduling. In Proceedings of the 6th International Symposium on AI, Robotics and Automation in Space, Montreal, QC, Canada, 18–22 June 2001. [Google Scholar]
- Qi, W.; Yang, W.; Xing, L.; Yao, F. Modeling and Solving for Multi-Satellite Cooperative Task Allocation Problem Based on Genetic Programming Method. Mathematics 2022, 10, 3608. [Google Scholar] [CrossRef]
- Gao, X.; Wang, J.; Huang, X.; Leng, Q.; Shao, Z.; Yang, Y. Energy-Constrained Online Scheduling for Satellite-Terrestrial Integrated Networks. IEEE Trans. Mob. Comput. 2023, 22, 2163–2176. [Google Scholar] [CrossRef]
- Huang, C.; Wang, H.; Zeng, L.; Li, T. Resource Scheduling and Energy Consumption Optimization Based on Lyapunov Optimization in Fog Computing. Sensors 2022, 22, 3527. [Google Scholar] [CrossRef] [PubMed]
- Rose, D.; Vincent, M.; Rose, R.; Ruf, C. The CYGNSS ground segment; innovative mission operations concepts to support a micro-satellite constellation. In Proceedings of the 2013 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2013. [Google Scholar] [CrossRef]
- Ben-Larbi, M.K.; Pozo, K.F.; Haylok, T.; Choi, M.; Grzesik, B.; Haas, A.; Krupke, D.; Konstanski, H.; Schaus, V.; Fekete, S.P.; et al. Towards the automated operations of large distributed satellite systems. Part 1: Review and paradigm shifts. Adv. Space Res. 2021, 67, 3598–3619. [Google Scholar] [CrossRef]
- Ben-Larbi, M.K.; Pozo, K.F.; Choi, M.; Haylok, T.; Grzesik, B.; Haas, A.; Krupke, D.; Konstanski, H.; Schaus, V.; Fekete, S.P.; et al. Towards the automated operations of large distributed satellite systems. Part 2: Classifications and tools. Adv. Space Res. 2021, 67, 3620–3637. [Google Scholar] [CrossRef]
- De Florio, S.; Zehetbauer, T.; Neff, T. SCOOP: Satellite Constellations Optimal Operations Planner. In Proceedings of the ICAPS, Ambleside, UK, 6–10 June 2006; p. 13. [Google Scholar]
- Stock, G.; Fraire, J.A.; Mömke, T.; Hermanns, H.; Babayev, F.; Cruz, E. Managing fleets of LEO satellites: Nonlinear, optimal, efficient, scalable, usable, and robust. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2020, 39, 3762–3773. [Google Scholar] [CrossRef]
- Stock, G.; Fraire, J.A.; Hermanns, H.; Cruz, E.; Isaacs, A.; Imbrosh, Z. On the Automation, Optimization, and In-Orbit Validation of Intelligent Satellite Constellation Operations. arXiv 2022, arXiv:2210.11171. [Google Scholar] [CrossRef]
- Thangavel, K.; Sabatini, R.; Gardi, A.; Ranasinghe, K.; Hilton, S.; Servidia, P.; Spiller, D. Artificial Intelligence for Trusted Autonomous Satellite Operations. Prog. Aerosp. Sci. 2024, 144, 100960. [Google Scholar] [CrossRef]
- Morosi, S.; Pierucci, L.; Grieco, L.A.; Piro, G.; Iacovelli, G.; Sciddurlo, G.; Guidotti, A.; Vanelli-Coralli, A.; Araniti, G.; Pizzi, S.; et al. From Interoperability to Full Integration—The ITA NTN Project Vision. In Proceedings of the European Wireless 2023; 28th European Wireless Conference, Rome, Italy, 2–4 October 2023; pp. 332–339. [Google Scholar]
- Yuan, S.; Peng, M.; Sun, Y.; Liu, X. Software defined intelligent satellite-terrestrial integrated networks: Insights and challenges. Digit. Commun. Netw. 2023, 9, 1331–1339. [Google Scholar] [CrossRef]
- Liao, Z.; Chen, C.; Ju, Y.; He, C.; Jiang, J.; Pei, Q. Multi-Controller Deployment in SDN-Enabled 6G Space–Air–Ground Integrated Network. Remote Sens. 2022, 14, 1076. [Google Scholar] [CrossRef]
- Ayofe, O.A.; Okafor, K.C.; Longe, O.M.; Alabi, C.A.; Tekanyi, A.M.S.; Usman, A.D.; Musa, M.J.; Abdullahi, Z.M.; Agbon, E.E.; Adikpe, A.O.; et al. SDN-Based Integrated Satellite Terrestrial Cyber–Physical Networks with 5G Resilience Infrastructure: Future Trends and Challenges. Technologies 2024, 12, 263. [Google Scholar] [CrossRef]
- Maity, I.; Vu, T.X.; Chatzinotas, S. D-Schedule: Dependency-Aware VNF Scheduling in Satellite-Terrestrial Networks. In Proceedings of the 2023 IEEE International Conference on Communications Workshops (ICC Workshops), Rome, Italy, 28 May–1 June 2023; IEEE: New York, NY, USA, 2023. [Google Scholar] [CrossRef]
- Avila, J.; Anna, C.; Ruiz-de Azua, J.A. Integrating geographical information systems in management and orchestration of satellites constellation to achieve a spatial-aware 6G Non-Terrestrial Networks architecture. In Proceedings of the 75th International Astronautical Congress (IAC), Milan, Italy, 14–19 October 2024; International Astronautical Federation (IAF): Paris, France, 2024. [Google Scholar]
- Liu, Y.; Wang, L.; Lu, Z.; Du, K.; Shou, G. A Stateless Design of Satellite–Terrestrial Integrated Core Network and Its Deployment Strategy. IEEE Trans. Netw. Serv. Manag. 2024, 21, 953–966. [Google Scholar] [CrossRef]
- Fang, X.; Feng, W.; Wei, T.; Chen, Y.; Ge, N.; Wang, C.X. 5G Embraces Satellites for 6G Ubiquitous IoT: Basic Models for Integrated Satellite Terrestrial Networks. IEEE Internet Things J. 2021, 8, 14399–14417. [Google Scholar] [CrossRef]
- Zhang, P.; Qin, Q.; Zhang, S.; Zhao, X.; Yan, X.; Wang, W.; Zhang, H. Near Real-Time Remote Sensing Based on Satellite Internet: Architectures, Key Techniques, and Experimental Progress. Aerospace 2024, 11, 167. [Google Scholar] [CrossRef]
- Evans, B.; Wang, N.; Rahulan, Y.; Kumar, S.; Cahill, J.; Kavanagh, M.; Watts, S.; Chau, D.; Begassat, Y.; Brunel, A.; et al. An integrated satellite–terrestrial 5G network and its use to demonstrate 5G use cases. Int. J. Satell. Commun. Netw. 2021, 39, 358–379. [Google Scholar] [CrossRef]
- Ding, F.; Bao, C.; Zhou, D.; Sheng, M.; Shi, Y.; Li, J. Towards Autonomous Resource Management Architecture for 6G Satellite-Terrestrial Integrated Networks. IEEE Netw. 2024, 38, 113–121. [Google Scholar] [CrossRef]
- Ma, T.; Qian, B.; Qin, X.; Liu, X.; Zhou, H.; Zhao, L. Satellite-Terrestrial Integrated 6G: An Ultra-Dense LEO Networking Management Architecture. IEEE Wirel. Commun. 2024, 31, 62–69. [Google Scholar] [CrossRef]
- Kafle, V.P.; Sekiguchi, M.; Asaeda, H.; Harai, H. Integrated Network Control Architecture for Terrestrial and Non-Terrestrial Network Convergence. IEEE Commun. Stand. Mag. 2024, 8, 12–19. [Google Scholar] [CrossRef]
- Diaz, J.J.; Pachler de La Osa, N.; Garau-Luis, J.J.; Crawley, E.F.; Cameron, B.G. Satellite Routing for mobile users under uncertainty in High Throughput constellations. In Proceedings of the 2024 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2024. [Google Scholar] [CrossRef]
- Lai, Z.; Wang, Y.; Li, H.; Wu, Q.; Zhang, Q.; Hou, Y.; Liu, J.; Li, Y. Your Mega-Constellations Can Be Slim: A Cost-Effective Approach for Constructing Survivable and Performant LEO Satellite Networks. In Proceedings of the IEEE INFOCOM 2024—IEEE Conference on Computer Communications, Vancouver, BC, Canada, 20–23 May 2024; IEEE: New York, NY, USA, 2024; pp. 521–530. [Google Scholar] [CrossRef]
- Abdelsalam, N.; Al-Kuwari, S.; Erbad, A. Physical layer security in satellite communication: State-of-the-art and open problems. IET Commun. 2025, 19, e12830. [Google Scholar] [CrossRef]
- Tao, Y.; Du, H.; Xu, J.; Su, L.; Cui, B. On-Demand Anonymous Access and Roaming Authentication Protocols for 6G Satellite–Ground Integrated Networks. Sensors 2023, 23, 5075. [Google Scholar] [CrossRef] [PubMed]
- Badotra, S.; Gurusamy, M. SecuNet 4D a comprehensive framework for distributed SDN security and resilience. Sci. Rep. 2025, 15, 15996. [Google Scholar] [CrossRef] [PubMed]
- Meng, Y.; Ke, C.; Huang, Z. Comprehensive Survey towards Security Authentication Methods for Satellite Communication Systems. arXiv 2025, arXiv:2503.23277. [Google Scholar] [CrossRef]
- Peled, R.; Aizikovich, E.; Habler, E.; Elovici, Y.; Shabtai, A. Evaluating the Security of Satellite Systems. arXiv 2023, arXiv:2312.01330. [Google Scholar] [CrossRef]
- Downey, J.; Gannon, A.; Smith, A.; Kochm, M.; Dudukovich, R. Emulated Spacecraft Communication Testbed for Evaluating Cognitive Networking Technology. In Proceedings of the 2023 IEEE Cognitive Communications for Aerospace Applications Workshop (CCAAW), Cleveland, OH, USA, 20–22 June 2023. [Google Scholar] [CrossRef]
- Singla, A.; Criscola, F.; Canales, D.; Calveras, A.; Fraire, J.A.; Ruiz-De-Azua, J.A. Integrating Satellite Constellation and Mobile Operations for 6G Non-Terrestrial Networks: Preliminary Results of Dynamic Scheduling. In Proceedings of the SPACOMM 2024, The Sixteenth International Conference on Advances in Satellite and Space Communications, IARIA Conference, Barcelona, Spain, 26–30 May 2024. [Google Scholar]
- Singla, A.; Calveras, A.; Betorz, F.; Ruiz-De-Azua, J.A. Enhancing Satellite Non-Terrestrial Networks Through Advanced Constellation Management: Optimizing In-Orbit Resources for NB-IoT. IEEE Open J. Commun. Soc. 2024, 5, 2113–2131. [Google Scholar] [CrossRef]
- Gannon, A.; Paulus, S.; Gemelas, C.; Vincent, L. Spacecraft-initiated scheduling of commercial communications services. In Proceedings of the 39th International Communications Satellite Systems Conference (ICSSC 2022), Stresa, Italy, 18–21 October 2022. [Google Scholar] [CrossRef]
- Singla Manau, A.; Calveras, A.; Betorz, F.; Ruiz De Azúa Ortega, J.A.; Fraire, J.A.; Munoz-Martin, J.F. Integrating Satellite and Network Operations for NB-IoT NTN Connectivity: In-Orbit Test Design of the Constellation Management System. In Proceedings of the IAF Space Operations Symposium. International Astronautical Federation (IAF), 2024, IAC 2024, Milan, Italy, 14–18 October 2024; pp. 738–749. [Google Scholar] [CrossRef]
- Ruiz De Azúa Ortega, J.A.; Betorz, F.; Rouzegar, H.; Camps, A. 6GStarLab—A CubeSat Mission to Support the Development and Standardization of Non-Terrestrial Networks Towards 6G. In Proceedings of the IAF Space Communications and Navigation Symposium. International Astronautical Federation (IAF), 2024, IAC 2024, Milan, Italy, 14–18 October 2024; pp. 516–522. [Google Scholar] [CrossRef]
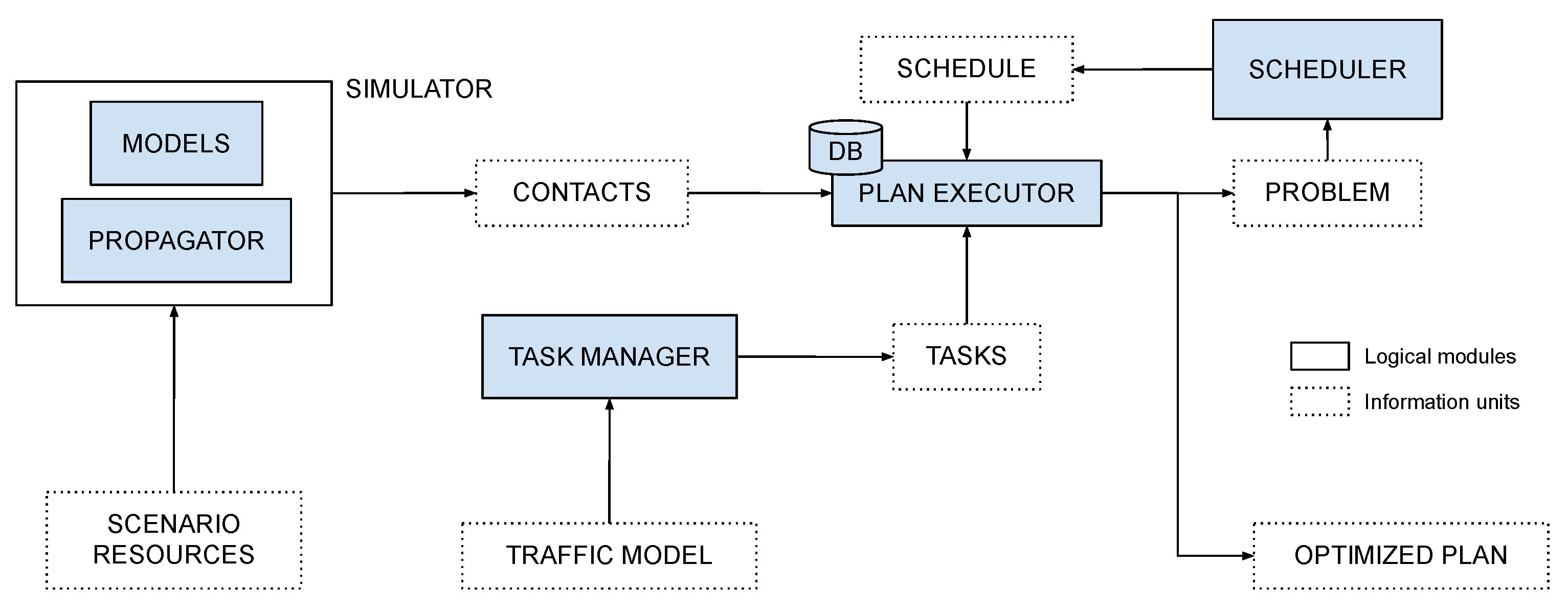
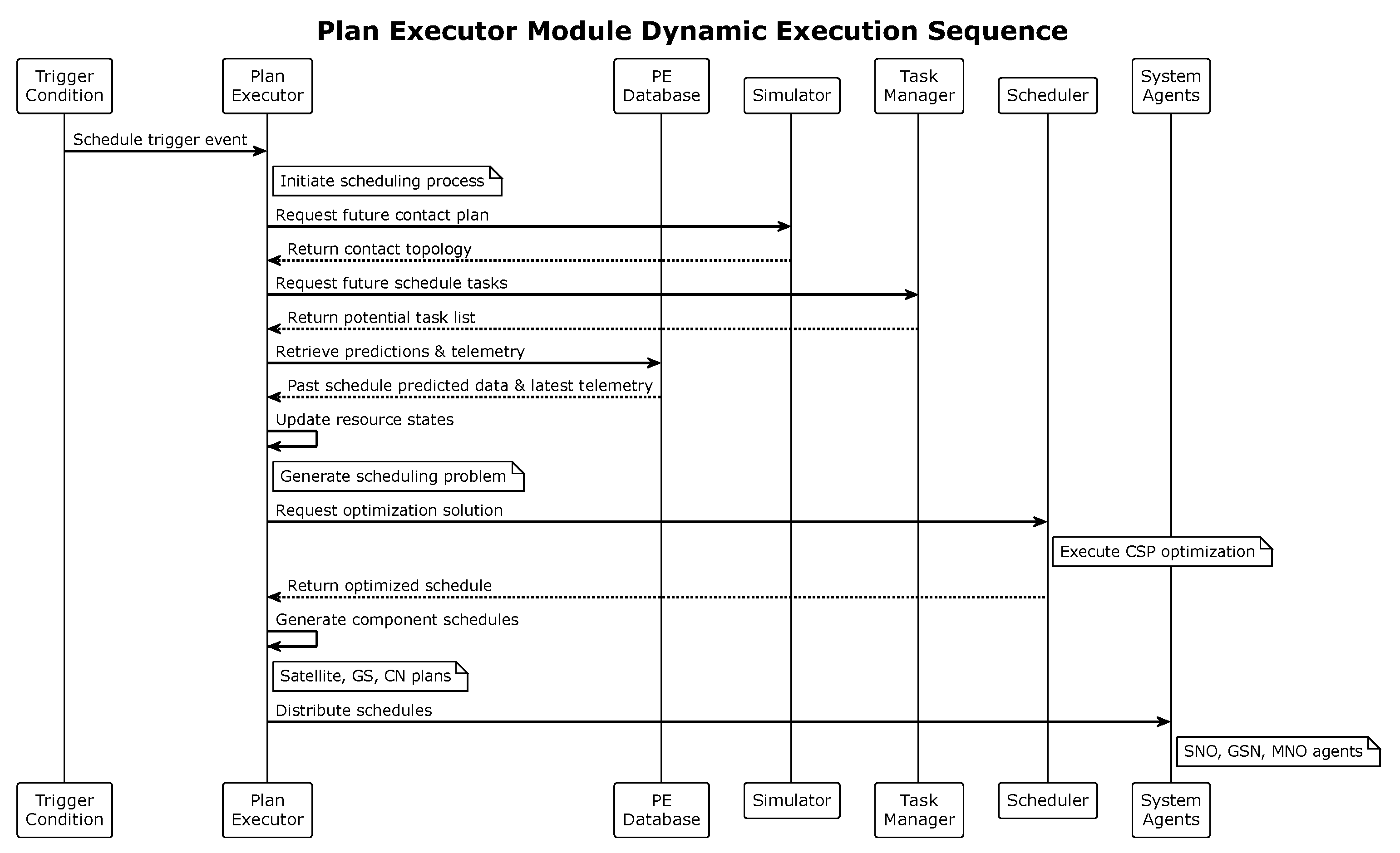
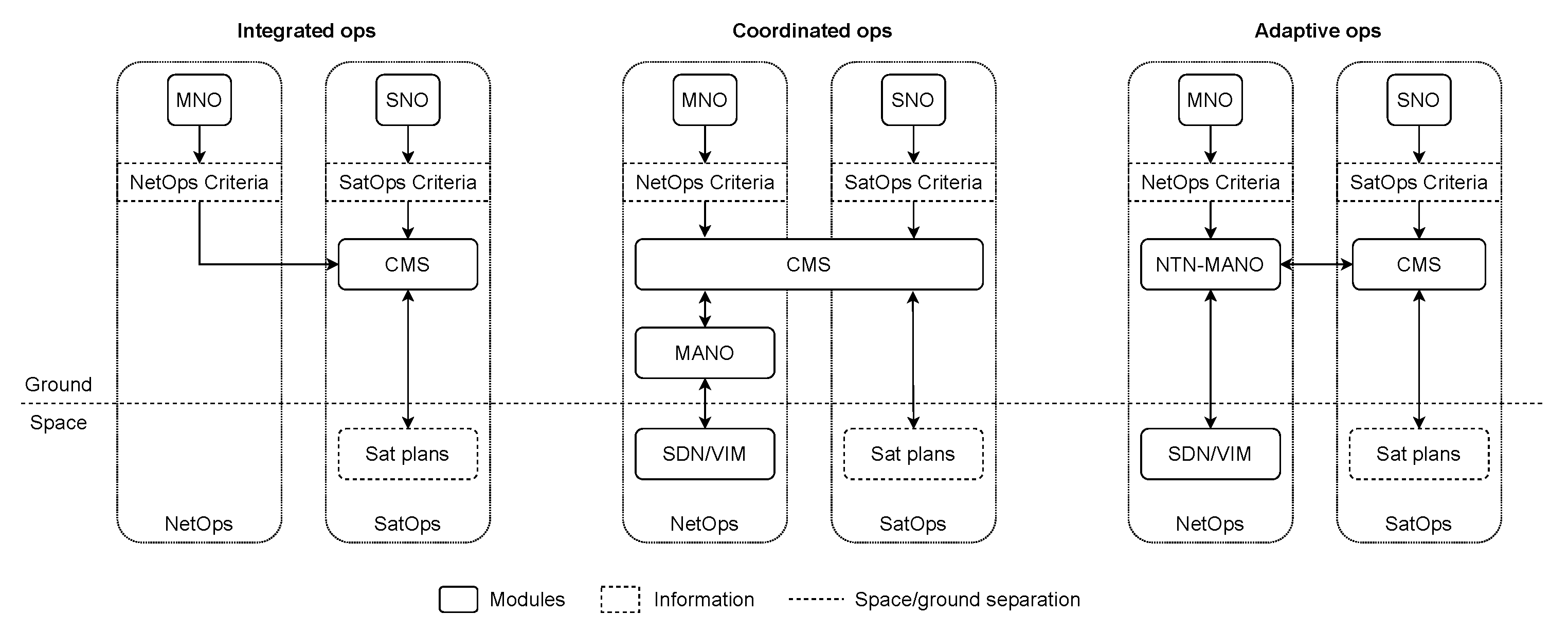
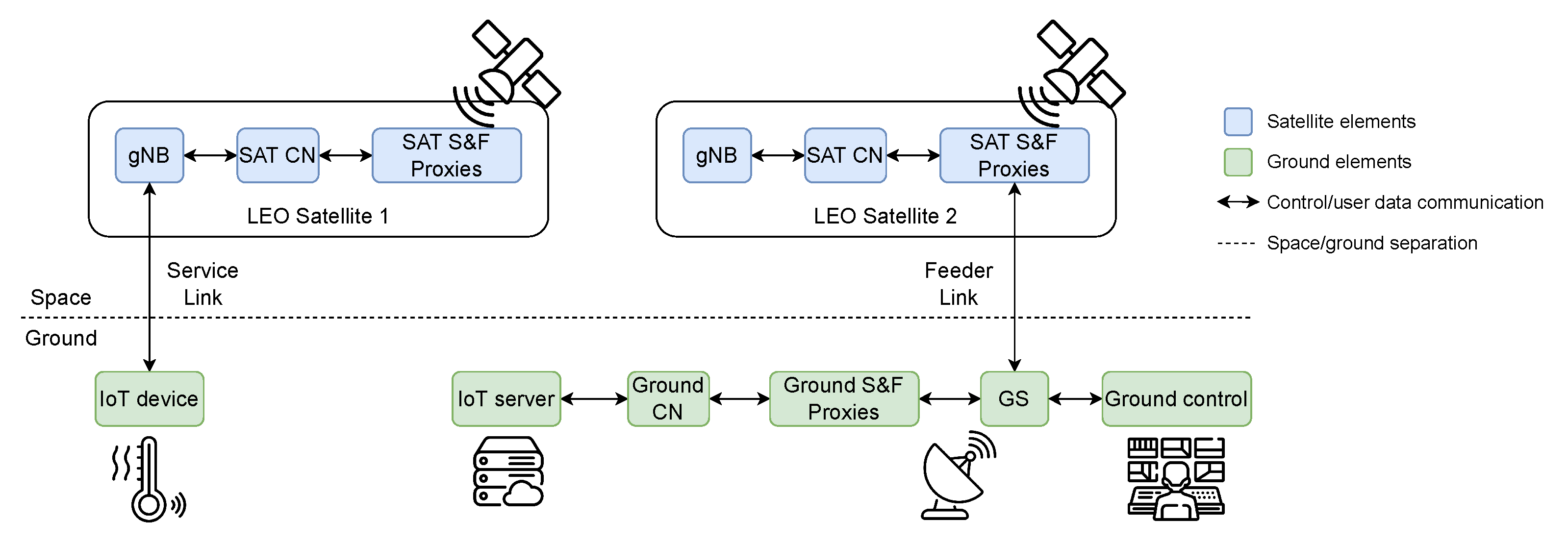
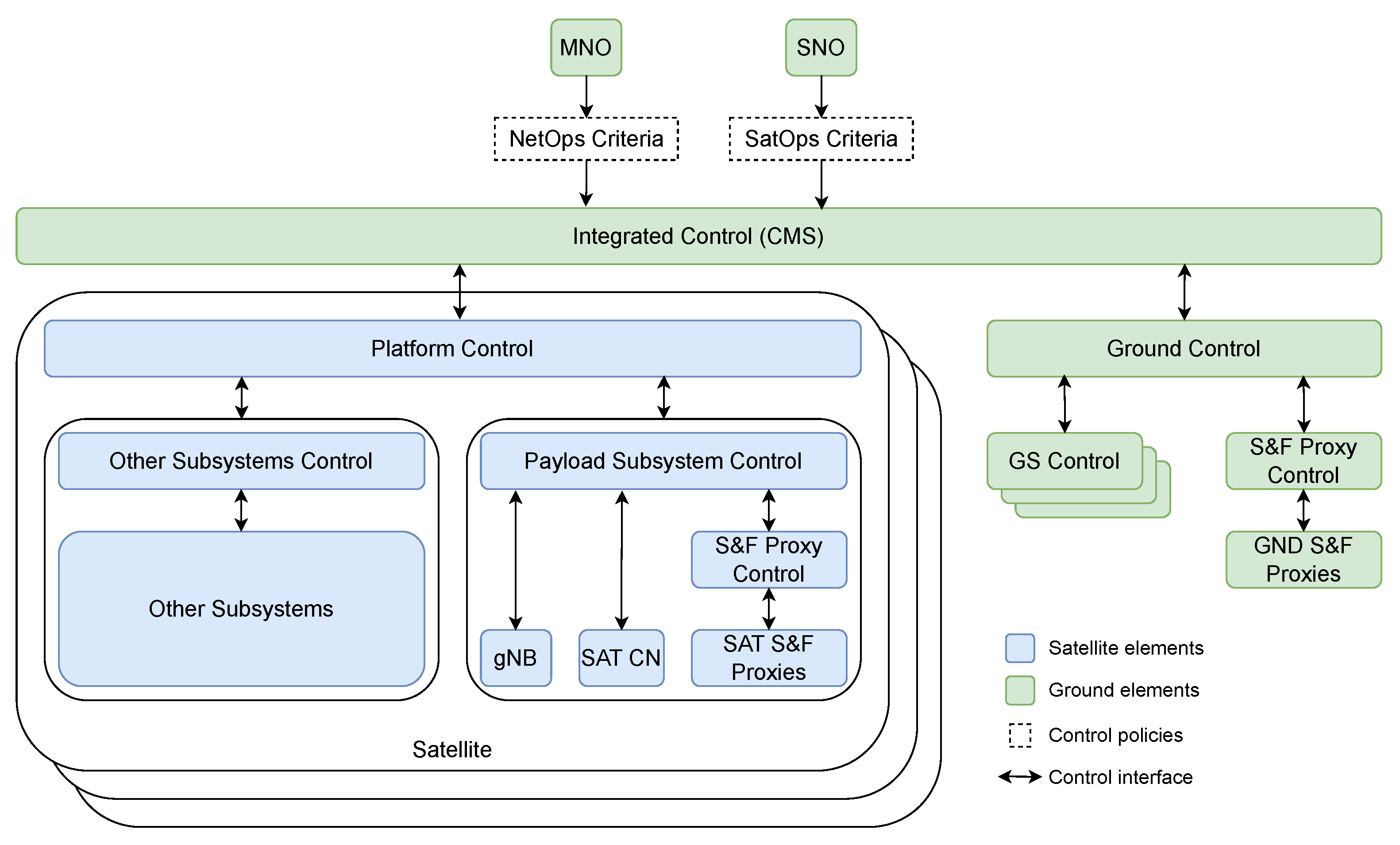
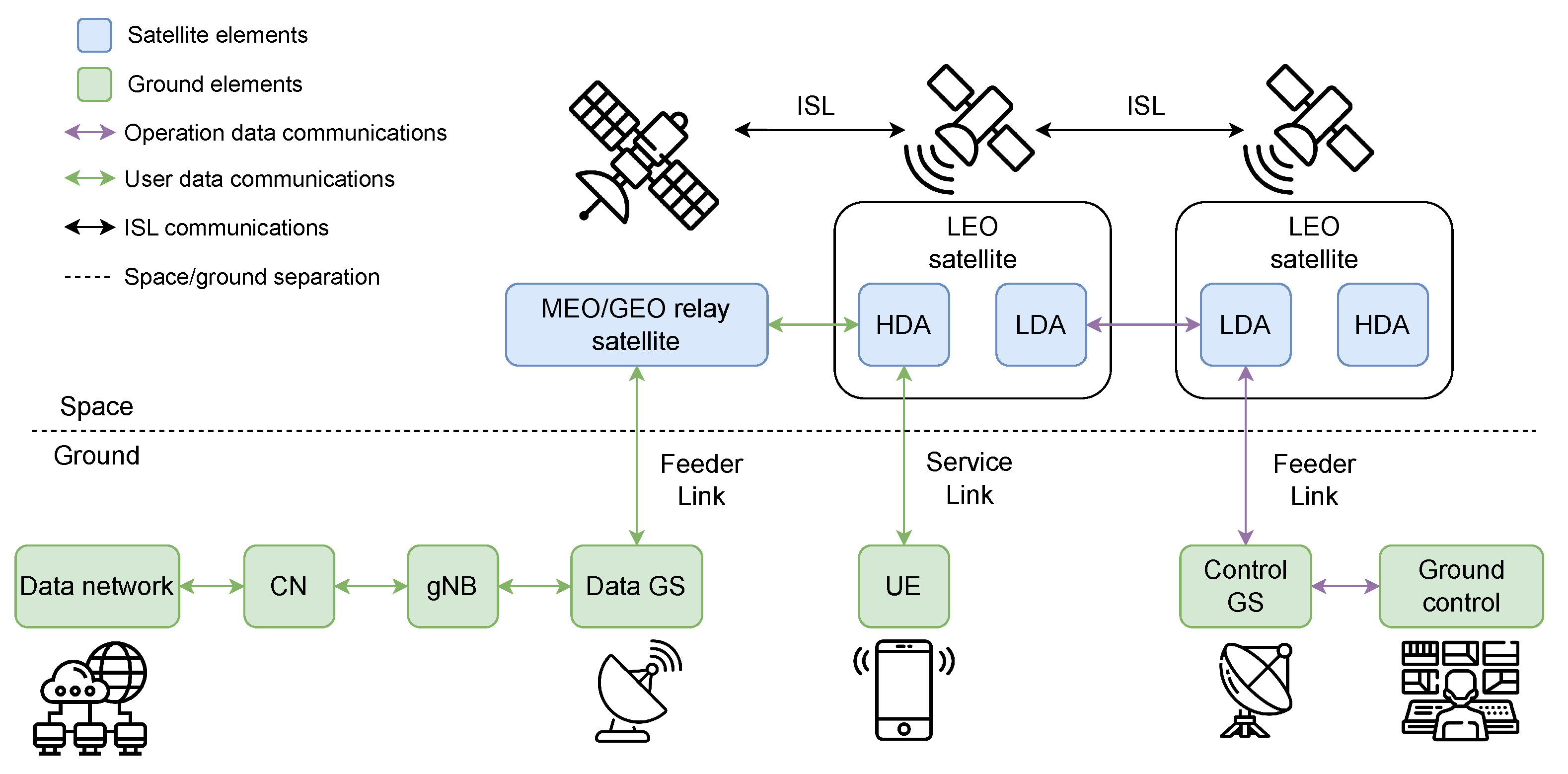
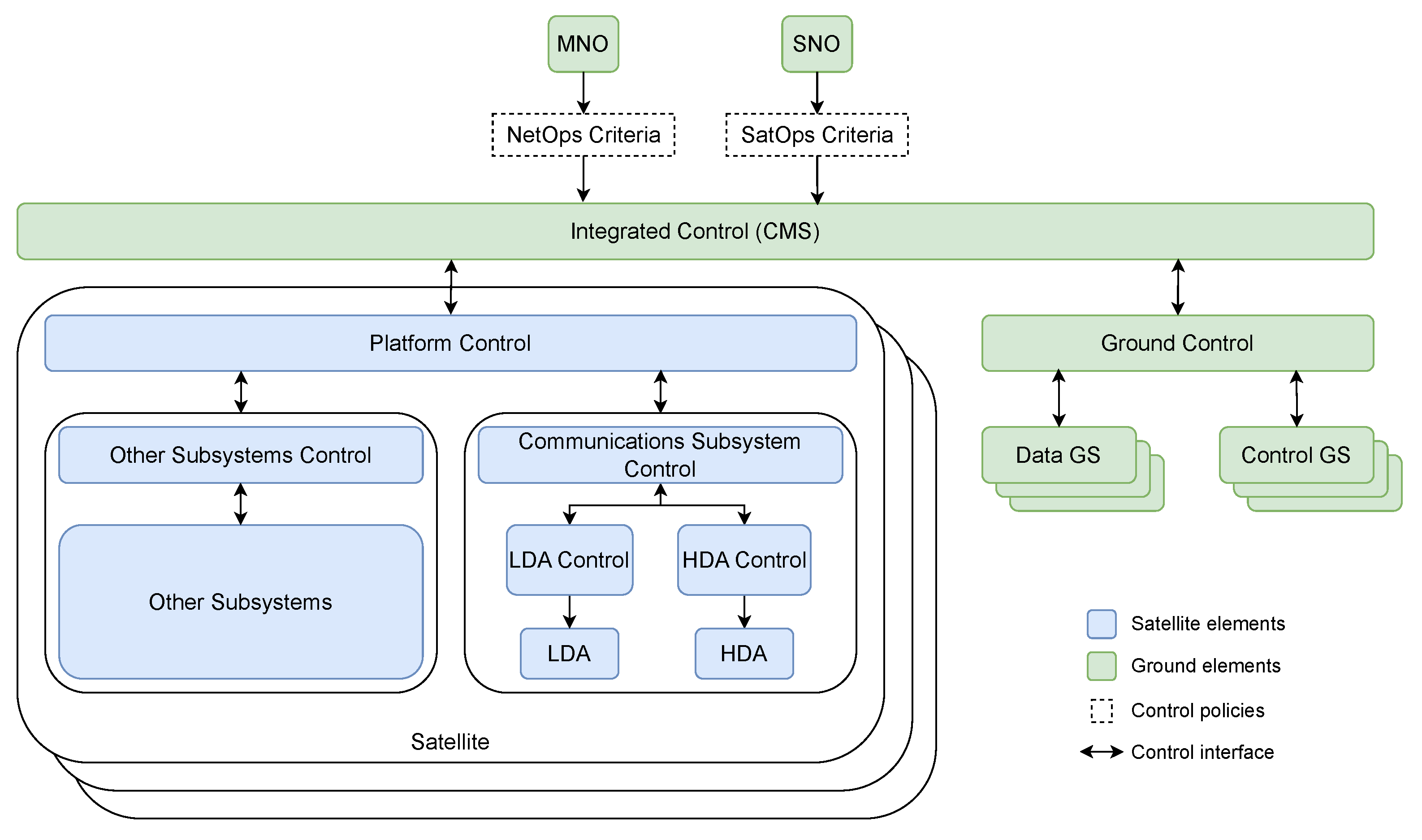
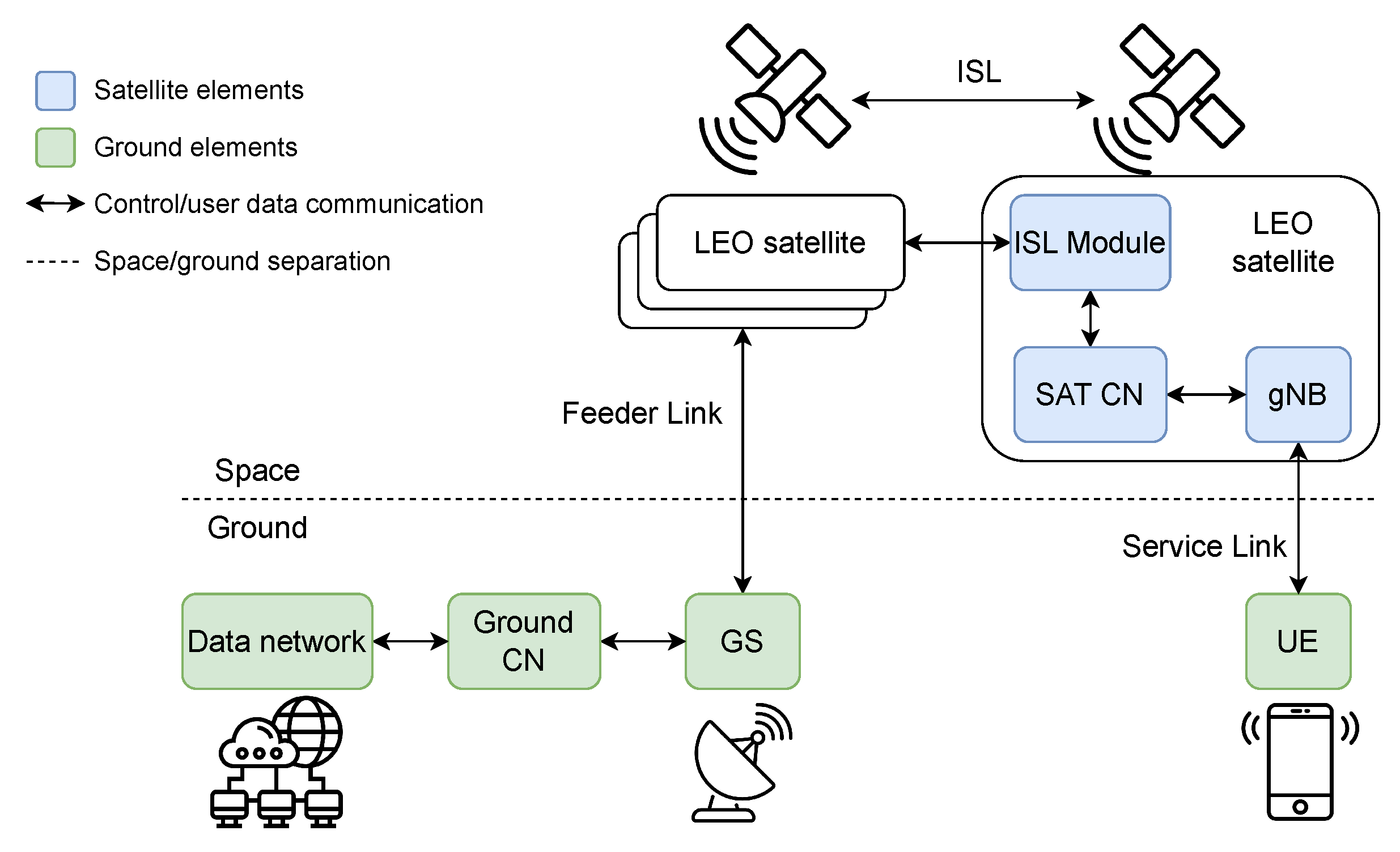
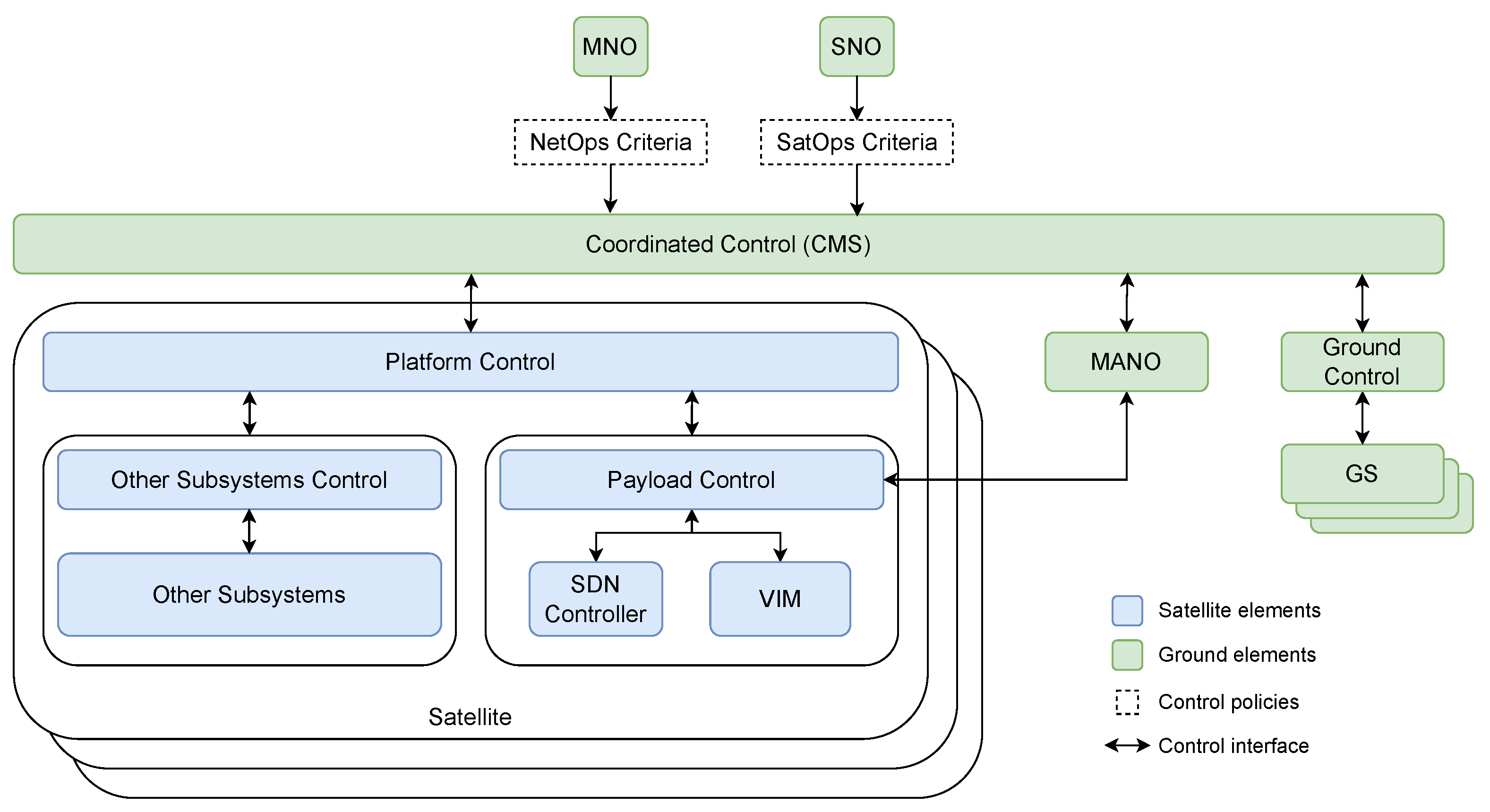
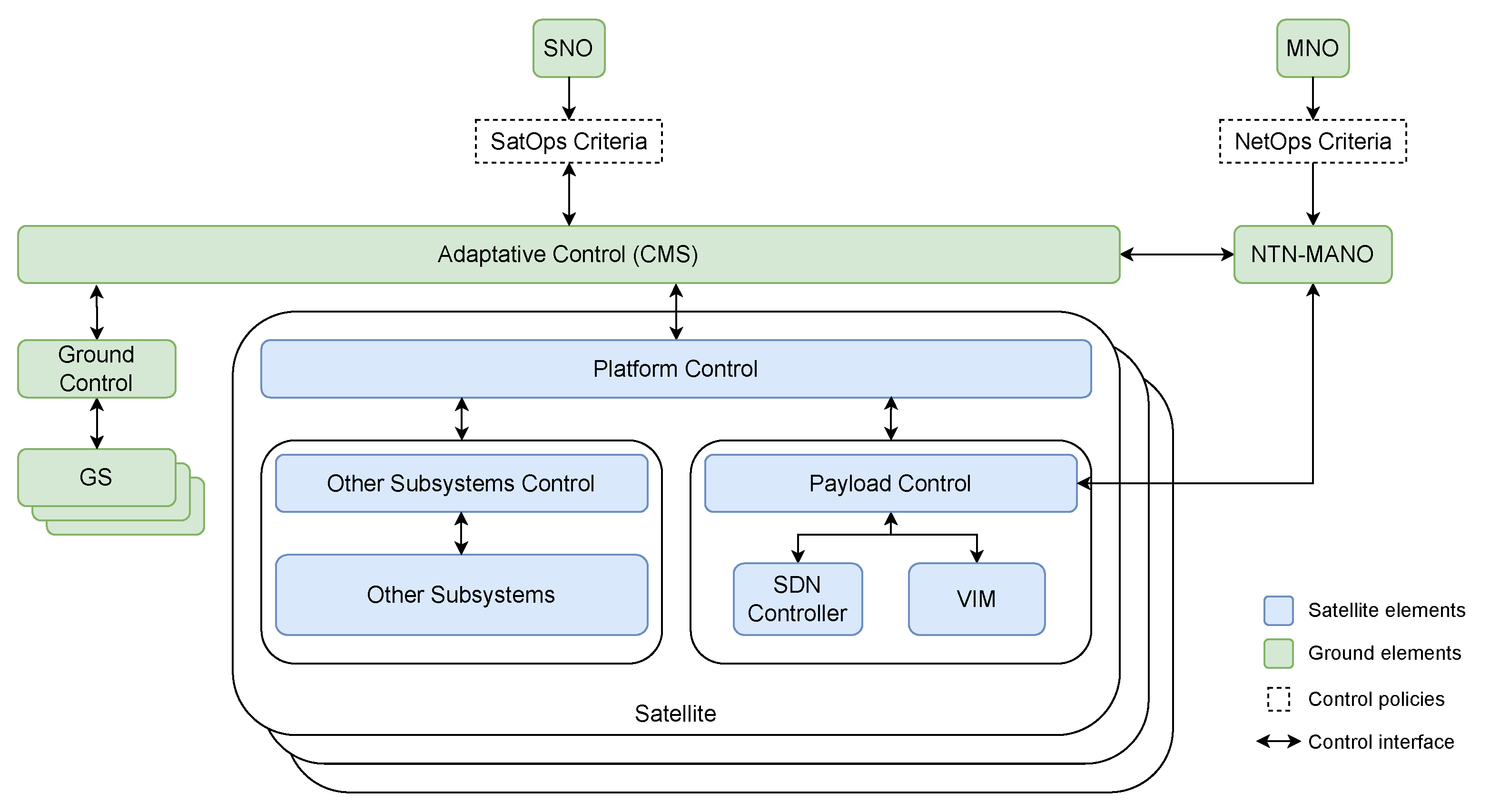
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).