1. Introduction
The transportation sector plays a crucial role in global mobility and economic growth; however, it is among the most energy-intensive industries and a major contributor to greenhouse gas emissions [
1,
2]. In 2022, 74% of global CO
2 was released, and approximately 8 billion metric tons of CO
2 emissions were emitted only in 2023, making road vehicle transport the second most significant source of emissions and the highest among all transport methods, thus surpassing those of any other end-use industry [
3,
4,
5]. For several decades, cars powered by internal combustion engines (ICEs) have dominated the automotive market, benefiting from established logistics for fuel supply, an extensive range, and low cost, yet they have come at the price of severe air pollution and accelerated climate change.
The transformation of the clean transportation system is mandatory to achieve climate targets, including deploying EVs. EV technologies must be continuously advanced, offering customers a much wider selection at a competitive price, to counteract the maturity that ICEs have achieved over the years [
6]. Driven by significant advancements in battery technologies, fuel cells, and governmental incentives, presently, power drive train options such as BEVs, plug-in hybrid electric vehicles (PHEVs), HEVs, and FCEVs have matured [
7]. These contributions have increased their affordability, making them competitive options for conventional fuel-based vehicles.
Despite the merits of vehicle electrification in terms of economic and environmental benefits, several challenges persist. One of the key concerns is the uncertainty in predicting energy consumption patterns and the lack of EV charging stations. With respect to BEVs, technology limitations due to battery energy density, low range, and degradation stand out as barriers to large-scale adoption. Additionally, limited charging stations and lengthy charging times, particularly with long-distance travel, increase EV range anxiety [
8,
9]. Furthermore, the range anxiety can be magnified because of inaccurate estimations of the range under nonideal operating conditions.
FCEVs, on the other hand, have a high energy density, zero-emission profile, and a rapid refuelling time of approximately 5 min or less [
10]. An FCEV typically receives energy through its fuel cells, with additional onboard battery packs for start-up, acceleration, regenerative braking, and auxiliary loads. Typically, in FCEVs, the battery is rated at 5–10% of the fuel cell ratings [
11]. Conversely, HEVs can be categorized into series, parallel, and series‒parallel hybrids, where the term hybridization refers to the integration of an ICE or a battery system (also referred to as an HEV in this study) with an electric powertrain. Since HEVs can operate without an ICE, in this case, fuel cells are combined with a battery pack, where the power split is greater than the typical 5–10% range of FCEVs. In fact, in this case, the power and energy split may be even between the battery and the fuel cell [
12]. In addition, most HEVs utilize a smaller battery than a BEV does to counteract some deficiencies in providing sufficient power during start-up, climbing, or acceleration [
13]. Despite the aforementioned benefits in offering low-carbon mobility, the energy consumption and operation of FCEVs and HEVs are complex because of their ability to switch between fuel cells and battery power, unlike BEVs, which rely solely on a predetermined battery capacity. Additionally, the lack of infrastructure through which to distribute fuel to the end user remains questionable [
14]. Furthermore, drive train efficiency and fuel utilization are influenced by a wide variety of factors, such as road type, weather conditions, and driving behaviour [
15], making it more challenging to estimate their driving range, hydrogen tank capacity [
16], and refuelling needs accurately.
Predicting energy consumption and energy-efficiency calculations are essential to help system operators design grid management strategies, allocate charging resources, and avoid unnecessary network congestion [
17]. Accordingly, two types of analyses exist at the macroscopic and microscopic levels [
18]. The former provides energy consumption insights in terms of average speed, whereas the latter investigates the effects of vehicle dynamics, driving style, and weather conditions. Macroscopic analyses are capable of modelling aggregate networks in a computationally fast manner, making them more suitable for large-scale systems [
19]. On the other hand, microscopic modelling is capable of estimating emissions and energy consumption on the basis of the instantaneous operating variables of individual vehicles, which are often obtained through traffic models [
20,
21,
22,
23,
24,
25,
26,
27,
28,
29,
30,
31,
32,
33]. While microscopic analysis for ICEs and BEVs has been extensively covered in the literature, studies on fuel cell-based vehicles remain limited, as the technology is still being developed, especially with respect to HEVs and lightweight vehicles.
The increasing penetration of EVs into power distribution networks poses new challenges and opportunities concerning grid planning, operation, and control. As EVs become prevalent, the load they exert upon the power grid continues to grow, posing challenges and opportunities. This can be better leveraged if the efficiency of different types of EVs, under realistic conditions, is understood for their integration with the grid.
To address these research gaps, this paper aims to conduct a microlevel comparative study of three vehicle technologies, namely, BEVs, FCEVs, and HEVs, to provide deeper insights into the performance of each configuration. All tested vehicles are assessed via a unified multicriteria and predictive framework that considers energy consumption and efficiency, drive train performance, and emissions under various road gradients, weather conditions, and initial battery states of charge. The key contributions of this paper are summarized as follows:
A unified structured comparative framework using a three-category metric system is presented that compares various vehicle aspects in terms of energy, powertrain performance, and environmental impact to provide a comprehensive vehicle assessment under different real-world driving conditions.
Unlike other studies based on fuel cell vehicles, this paper highlights the performance of HEVs, which are often overlooked in the literature from multiple technical and environmental perspectives.
By integrating both simulation models and real-world driving data for road grades and weather conditions, a more accurate and realistic representation of EV, HEV, and FCEV performance is obtained.
The effects of varying wind resistance on vehicle energy consumption performance, drive train response, and battery discharge are investigated, thus extending the current state of the art through quantifying the aerodynamic influence on different EV performance.
A scalable data-driven approach using multivariate linear regression models is developed to estimate vehicle performance under diverse operational conditions and for non-explored driving scenarios, thus supporting informed decision-making for EV adoption, planning, and integration.
The rest of the paper is organized into five sections.
Section 2 describes the recent literature covering electric vehicle analysis and further emphasizes the current state-of-the-art and paper contributions. In
Section 3, the system description, scope of analysis and research methodology are provided.
Section 4 presents the simulation results and analysis, both in time-based analysis and in a quantitative manner. A discussion is presented in
Section 5. Then, in
Section 6, the modelling is extended and validated using commercial EVs, representing the three configurations. Finally, the conclusions are presented in
Section 7.
2. Related Work
Several works investigating the effects of microscopic influences on EV energy consumption and performance, which consider both driving styles and external impacts, have been reported [
20,
21,
22,
23,
24,
25,
26,
27,
28,
29,
30,
31,
32,
33]. A summary of the literature review is listed in
Table 1, providing a comprehensive comparison of studies that investigate the performance of different EV configurations considering driving profile cycles and style, environmental conditions, and road nature on powertrain performance, energy and battery consumption, and emissions.
The authors of [
20] studied the effects of driving style, weather variables, infrastructure, and traffic intensity on energy consumption in BEVs via energy prediction models. For the BEVs in [
21,
22,
23,
24], the authors specifically addressed the effect of temperature on energy consumption performance for several EV commercial models on the basis of trip length, road grade, and driving habits via real-time data. However, only ref. [
21] extended the analysis to include the SoC. The work in [
22] applied correlational analysis to identify relationships between different influencing factors and vehicle energy consumption for battery-powered vehicles. In [
25], energy consumption, cost savings, and emission calculations for ICEVs and EVs across different routes were carried out, neglecting any weather influences. Similarly, studies in [
26,
27] investigated energy consumption for ICEs, BEVs, PHEVs, and HEVs via real-time data. Despite neglecting weather variabilities in their analysis, the former accounted for emission effects, whereas the latter investigated the effects on engine and motor efficiency operating points and battery SoCs. The effect of wind was only covered in [
28] for optimal routing decisions via data-driven approaches and sensitivity analysis, emphasizing the impact of wind on energy consumption during trips. An estimation of the driving range of EVs was presented in [
29,
30] for different market-based vehicles, where the effect of multiple parameters on energy consumption was analyzed. However, these studies neglected any external weather influences, such as temperature and wind. In contrast, FC-based vehicles were investigated in [
31,
32,
33], with [
31] focusing on purely fuel cell-dependent configurations and [
32,
33] exploring HEV configuration. While [
31] focused on the cost-effectiveness of different powertrains for heavy-duty vehicles, [
32] developed a microscopic model to compare HEVs and EVs within traffic simulations, and [
33] introduced a real-time energy consumption model, which was validated through both simulation and real-world data.
In highlights of the above, driving behaviour, road conditions, and trip characteristics were extensively analyzed in the literature, where factors such as driving speed profiles and road gradients were assessed via both modelling and real-world data. In contrast, studies that covered weather effects occasionally neglected the influence of wind on energy consumption and routing decisions. While several studies incorporated real-world data to evaluate vehicle performance, most studies overlooked vehicle motor and battery efficiency. In addition, none of the existing studies applied data-driven energy predictive models that consider varying trip conditions. Additionally, for FC-based vehicles, which are either fully fuel cell-dependent or hybrid, evaluations of energy consumption and vehicle performance in lightweight vehicles are still underrepresented in the literature. When available, studies often lack a dedicated focus on HEV-specific analysis, leading to a gap in understanding their efficiency, sustainability, and real-world operational behaviour. Moreover, the combined effects of road, environmental, and driving conditions, vehicle performance, and emissions are still essential to gain a more holistic understanding of energy dynamics across different vehicle technologies to facilitate wider adoption of fuel cell-based vehicles and consequently accelerate the transition to sustainable transportation.
5. Discussion
As demonstrated in
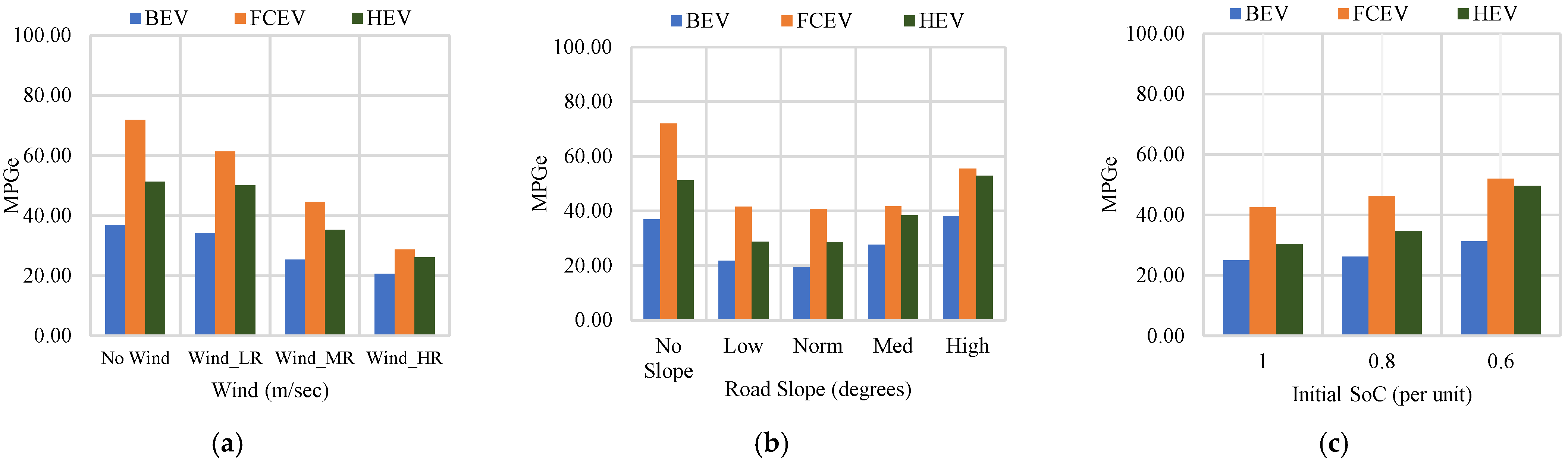
Section 4, this paper presents a comparative study of BEVs, FCEVs, and HEVs via a simulated modelling approach, integrating real-world weather data and driving cycles via actual road data with frequent stops, intersections, and varying driving styles (eco and aggressive). Vehicles are assessed via a multicriteria assessment metric system that compares the three vehicles in terms of energy and efficiency, powertrain performance, and emissions. This metric system has been structured to examine the effects of weather conditions (low to high winds), road gradients (low to high slopes), and different initial SoCs on vehicle performance in both individual and cumulative manners.
Section 5.1 is provided to evaluate each vehicle’s overall performance and sustainability, thus providing more insights for evaluating vehicle performance in a more holistic, qualitative manner by consolidating all previously discussed metrics. In addition, a more generalized methodology involving correlation and regression analysis is carried out in
Section 5.2 and
Section 5.3 to quantify the impacts of the initial state of charge, road grade, and wind speed on energy consumption and performance. This helps provide a more structured predictive approach for analyzing unexplored driving scenarios in a systematic manner, allowing for better data-driven decision-making with respect to EV power evaluation, environmental sustainability, and fleet management.
5.1. Overall Vehicle Performance Evaluation
Table 6 compares the three vehicles via the multiple key metrics explained in
Section 4, which utilize a qualitative scale and four comparative levels to indicate relative performance, namely, low, moderate, moderate-high, and high. Consequently,
Table 6 highlights the strengths and weaknesses of each vehicle technology across the studied areas. Furthermore, the radar plot in
Figure 17 provides a better visual representation of the benefits and limitations of each configuration. With respect to the evaluation of BEVs, their moderate motor and torque capabilities may slightly compensate for their overall low performance, making them ideal for rapid and dynamic urban driving where more regenerative braking action can assist in recovering some of the lost energy. Long-distance driving is still a major concern, raising more doubts regarding range anxiety and the need for more reliable and robust charging stations. Its low energy utilization is reflected by high total net energy and low MPGe, resulting in higher energy consumption over the entire drive cycle. Consequently, this is further reflected in the vehicle’s overall efficiency, making it less efficient than other vehicle technologies. In addition, since they are fully battery dependent, BEVs have low energy distribution flexibility, which may be translated into a limited driving range and long charging times. Furthermore, its low degree of carbon neutrality indicates that BEV emissions have a highly negative environmental effect.
A more balanced performance across all metrics is demonstrated by FCEV performance, offering a moderate to high overall status. Compared with BEVs, their better energy consumption pattern, MPGe, and net energy savings indicate a promising distance-to-energy ratio and energy efficiency, making them well suited for long trips on highway roads. In addition, their strong powertrain response due to fuel cell utilization is evidenced by their high-power characteristics and torque range, particularly under varying load and trip conditions. Their reliance on a double-power propulsion system increases their flexibility in energy distribution. Moreover, their highest carbon neutrality score highlights their potential for zero-emission operation when they are operated with green hydrogen. However, despite their ability to deliver a smooth and dependable powertrain response, they do not possess the immediate torque and seamless power delivery that BEVs possess.
HEVs, meanwhile, demonstrate the highest among the three configurations as the best compromise among all covered metrics by combining the benefits of both BEVs and FCEVs. With an overall moderate to high score, HEVs are the most energy-efficient option in terms of achieving the best energy consumption per distance travelled and total net energy savings. Because they are able to operate both battery and fuel cells, this hybridization allows them to optimize and balance the energy distribution and offer a high torque range, making them strong powertrains suitable for both urban and highway roads. Although HEVs do not achieve full zero-emission operation, their high motor efficiency and ability to recover energy through regenerative braking make them a practical transition solution toward full electrification.
Figure 17.
Radar plot comparing overall BEV, FCEV, and HEV performance.
Figure 17.
Radar plot comparing overall BEV, FCEV, and HEV performance.
5.2. Statistical Analysis
In
Table 7, a correlation analysis is performed, taking into account four main variations, such as the EV configuration, initial SoC, road grade, and average wind speed, while measuring their correlation to some of the main performance metrics. Specifically, the battery’s final SoC is measured along with the battery’s net energy, FC energy, total net energy, energy per distance, and carbon intensity.
For this paper, the Pearson correlation coefficient measures the strength and direction of the linear relationship between two variables,
X and
Y. In this case,
X represent the state of charge, road grade angle, and wind speed, and
Y represent various performance metrics as listed in
Table 7.
where
Xi, Yi represent individual data points;
represent the mean of X and Y, respectively.
r ranges from −1 (perfect negative correlation) to +1 (perfect positive correlation), with 0 indicating no correlation.
All three EV configurations show a relatively strong linear relationship between their initial and final SoCs, especially for BEVs at 0.798 and HEVs, where the correlation coefficient is almost equal to 1 (0.956). This means that a high initial charge helps preserve battery charge levels while making the batteries very efficient. In contrast, in FCEVs, the initial charge level appears to have much less influence on the final SoC (0.173). Indeed, for FCEVs, the final SoC is influenced mostly by the wind speed and road grade.
It is evident that road grade specifications significantly impact fuel cell power consumption. In accordance with the correlation analysis, a moderate correlation is exhibited (0.362 for FCEVs; 0.371 for HEVs), primarily due to increased energy requirements in ascending regions. In contrast, BEVs show a weaker correlation (0.334) between the road grade and the total energy consumption. This indicates that regenerative braking is more prominent in HEVs since the energy demand can be split among multiple energy sources. The relatively strong negative correlation between grid carbon intensity and road grade (−0.307 for FCEVs, −0.338 for HEVs) suggests that vehicles operating in hilly terrains tend to decrease energy efficiency and carbon emissions per unit of energy drawn from the grid.
The effect of the average wind speed is also substantial, with a strong negative correlation (−0.829 in FCEV, −0.288 in HEV) for the final battery SoC, indicating that higher wind speeds tend to deplete the battery more quickly. Moreover, as fuel cell energy consumption in FCEVs and HEVs appears very high, a strong positive relationship is exhibited with the speed of wind (0.973 and 0.943, respectively), confirming the increased energy demand for overcoming aerodynamic drag. However, in the case of BEVs, the correlation between the wind speed and the carbon equivalence factor is almost absent (−0.093), probably indicating that energy consumption is very stable even during the variation in winds because the fuel cells do not operate during the entire trip.
5.3. Regression Models
In
Section 5.2, statistical analysis was carried out as an initial stage, which helped identify relationships and associations among variables. This helped identify the most influential factors (among the initial Soc, road grade, and wind speed) affecting vehicle performance and emissions for each vehicle type. In addition, this correlational analysis aids in identifying how varying environmental and operational conditions affect each vehicle configuration.
Consequently, regression analysis is conducted in this subsection to quantify the degree of influence of the aforementioned factors on energy consumption and emissions, thus allowing for a more generic and precise estimation of vehicle performance under unexplored conditions.
The required performance metric is modelled using the three main variables considered in a multiple linear regression problem, and the equation can be defined as follows:
where
are the independent variables. In this case, they are the initial SoC, wind speed, and road grade.
is the performance metric to be calculated.
are the coefficients of the regression equation indicating the effect of each variable on Y.
To find the regression coefficients, the least-squares method is used, solving the following equation:
where
After obtaining the regression equation, it is crucial to find the coefficient of determination
R2, which measures how well the model explains Y:
where
Accordingly,
Table 8 shows the regression equations and how key parameters influence the battery state of charge, energy consumption, fuel cell usage, and carbon emission intensity across all three vehicle configurations. The high R
2 values, which range between 81.39% and 98.67%, indicate the model’s strong predictive ability, with a strong explanation of the variations in the dependent variables. Furthermore, these linear models are a major outcome of this analysis, offering a scalable and programmable approach for predicting a vehicle’s performance under unexplored and diverse conditions.
6. Model Validation Analysis Using Commercial EV Models
In this section, the simulation is extended to utilize the battery capacity and power split of three commercial EVs representing the three technologies addressed in this paper, with vehicle specifications listed in
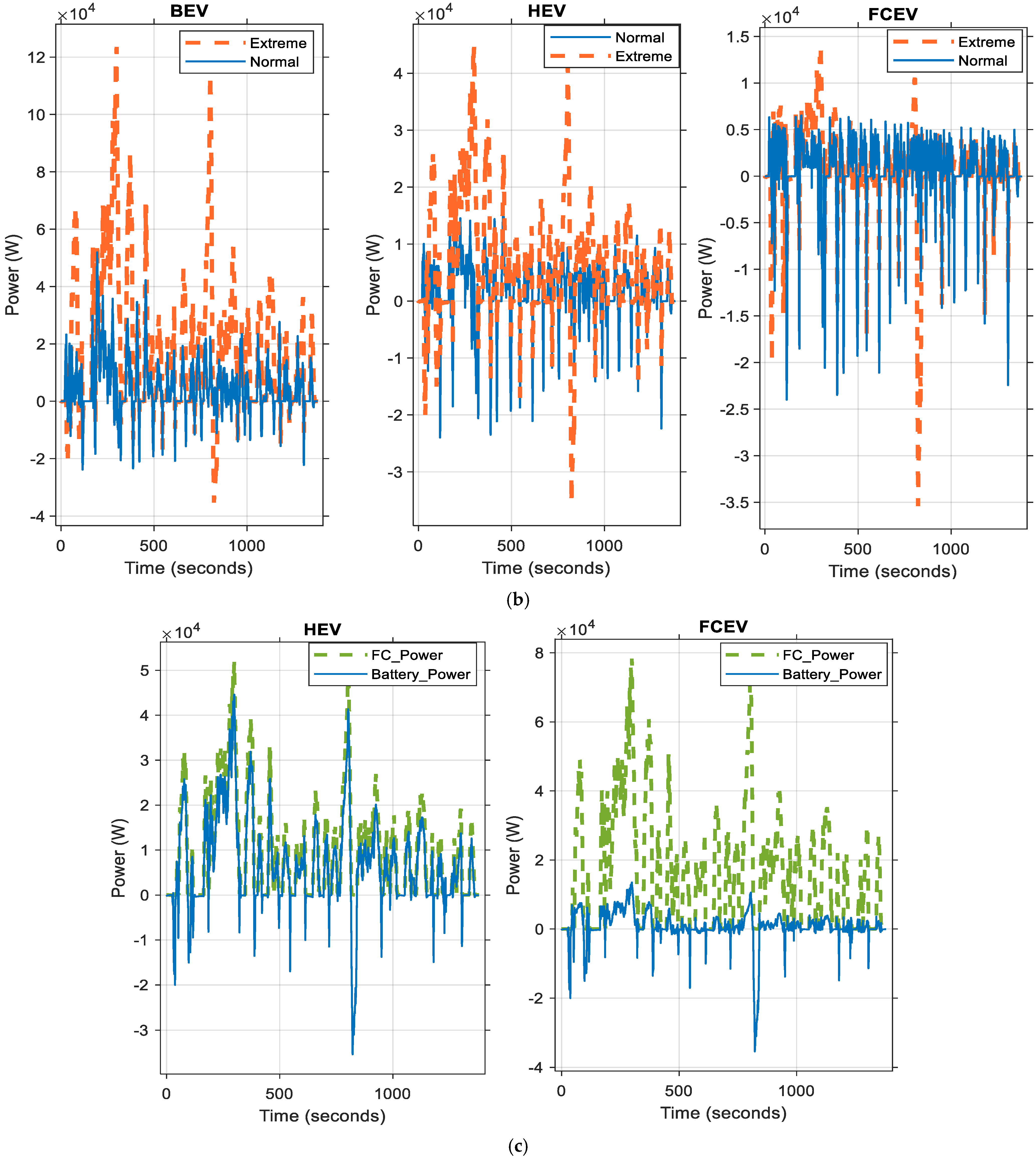
Table 9. In this section, models were tested for two scenarios: (a) a baseline case, representing normal driving conditions, characterized by zero wind speed, flat terrain, and with an initial SoC of 0.6 p.u; (b) an extreme scenario, where vehicles experience the most challenging journey conditions, with the highest wind speeds, roughest road, and same initial SoC as the normal case. Hence, the adverse effects of wind and road conditions can be observed for these commercial EV models compared to normal driving conditions.
The results for SoC profiles over time are summarized in
Figure 18 for the three tested vehicle models under both normal and extreme journey conditions. In
Figure 18a, it is evidenced that the SoC drop for both BEV and HEV is around 3% for normal conditions, indicating efficient energy usage in mild environments. In contrast, in extreme conditions, the SoC for both vehicles drops significantly to 10% and 14%, respectively, at the end of the drive cycle. This is also reflected in
Figure 18b for the battery power consumption with time. Regarding the FCEV, SoC trends of
Figure 18c exhibit greater fluctuations compared to the BEV and HEV, with a gradual decrease under normal driving conditions, compared to sharp drops and irregular variations in extreme driving scenarios.
This behaviour can be interpreted due to the different dynamic response characteristics exhibited by the fuel cell, compared to the more stable energy delivery patterns of battery-dominant systems like the BEV and HEV. In
Figure 18c, the power split between the battery pack and the FC is illustrated. It shows that the power split is nearly the same for the HEV model and the FCEV; the battery is only used for peak power and acceleration periods and benefits from the regenerative braking.
Figure 18.
Commercial EV models result under normal conditions and extreme wind and road grade conditions: (a) battery SoC, (b) battery power, (c) battery and FC power split.
Figure 18.
Commercial EV models result under normal conditions and extreme wind and road grade conditions: (a) battery SoC, (b) battery power, (c) battery and FC power split.
Comparing the three modelled vehicles under standard drive cycles for both normal and extreme driving conditions, it can be concluded that although BEVs exhibit the most stable SoC performance with minimal variation and smooth power delivery, their total dependability on battery capacity and recharging demands may often limit their usable range. In contrast, FCEVs demonstrate better potential for extended driving ranges but at the cost of more dynamic SoC behaviour, with noticeable fluctuations due to the transient response characteristics of the fuel cell system, especially under extreme driving. Ultimately, HEVs offer a balanced alternative among all technologies with moderate SoC variations and reasonable energy efficiency, thus placing them as a viable option for mixed driving conditions.
7. Conclusions
EVs offer a promising pathway toward green and more efficient transportation solutions, particularly fuel cell-based solutions. As a result, microlevel efficiency modelling and regression analysis of these vehicles are essential for understanding their energy optimization, performance trade-offs, and environmental impact under varying driving conditions. In this work, the performance of three EVs, including BEVs, FCEVs, and HEVs, was compared via a unified multicriteria framework under a standardized driving cycle while varying the road slope, thus representing different terrains, varying the wind speed profiles for different seasonal effects, and implementing three ranges of initial SoCs. In total, for each EV configuration, 39 scenarios were performed, thus covering a very wide range of operational and environmental conditions.
Compared with other works related to HEVs, this study covers a more comprehensive vehicle performance analysis, covering technical, environmental and predictive measures that have been overlooked in other similar studies. In addition, a thorough and detailed analysis of the results provided valuable insights into the energy consumption, regenerative braking capabilities, drive train limits, and carbon emissions for each case study.
The results revealed that the range and energy consumption are highly affected by the wind speed and terrain conditions. Hence, by including these factors, a more reliable and accurate estimation of the total energy consumption and the driving range is possible. In terms of vehicle performance, FCEVs have an inherently lower refuelling time and lower dependency on lithium-ion batteries; hence, FCEVs can be promising as a sustainable EV solution, assuming green hydrogen production. Among all the tested vehicles, HEVs are the best in terms of efficiency and range in real-world operation, especially when limitations arise against a pure battery electric powertrain. Future studies may also consider evaluating the effects of hydrogen availability, battery degradation, and economic viability on the long-term uptake of these technologies. Awareness of these factors will be instrumental in facilitating the evolution of more sustainable transport solutions.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}