
Connected and Automated Vehicles: Infrastructure, Applications, Security, Critical Challenges, and Future Aspects




 ,
, 
Abstract
1. Introduction
1.1. Motivation
1.2. Contributions
- 1.
- Presents a comprehensive survey on the current state-of-the-art of AVs and provides an in-depth discussion of the various aspects of AVs and their impact on society.
- 2.
- Presents the infrastructure and Ad Hoc autonomous vehicles, focusing on their respective technologies, routing methodologies, and data dissemination mechanisms.
- 3.
- Presents various aspects of AVs in smart cities, such as public adoption, driverless city planning, traffic management, environmental impact, and public health, and discusses key associated challenges.
- 4.
- Presents emerging technologies such as artificial intelligence (AI), cloud computing integration, and solar power use in automated vehicles.
- 5.
- Presents cyber attacks that can affect autonomous vehicles, attack management, traditional security devices, threat modeling, authentication schemes, over-the-air updates, zero trust architectures, data privacy, and the corresponding defensive strategies to mitigate such risks.
- 6.
- Provides forensics approaches, tools used, standards involved, and challenges associated with conducting digital forensics in the context of autonomous vehicles.
- 7.
- Provides various simulators used in developing and testing autonomous vehicles. Further, it presents international standards, guidelines, and best practices available for autonomous vehicles (AVs).
- 8.
- The core contribution of this paper is to discuss open research problems, challenges, and future directions.
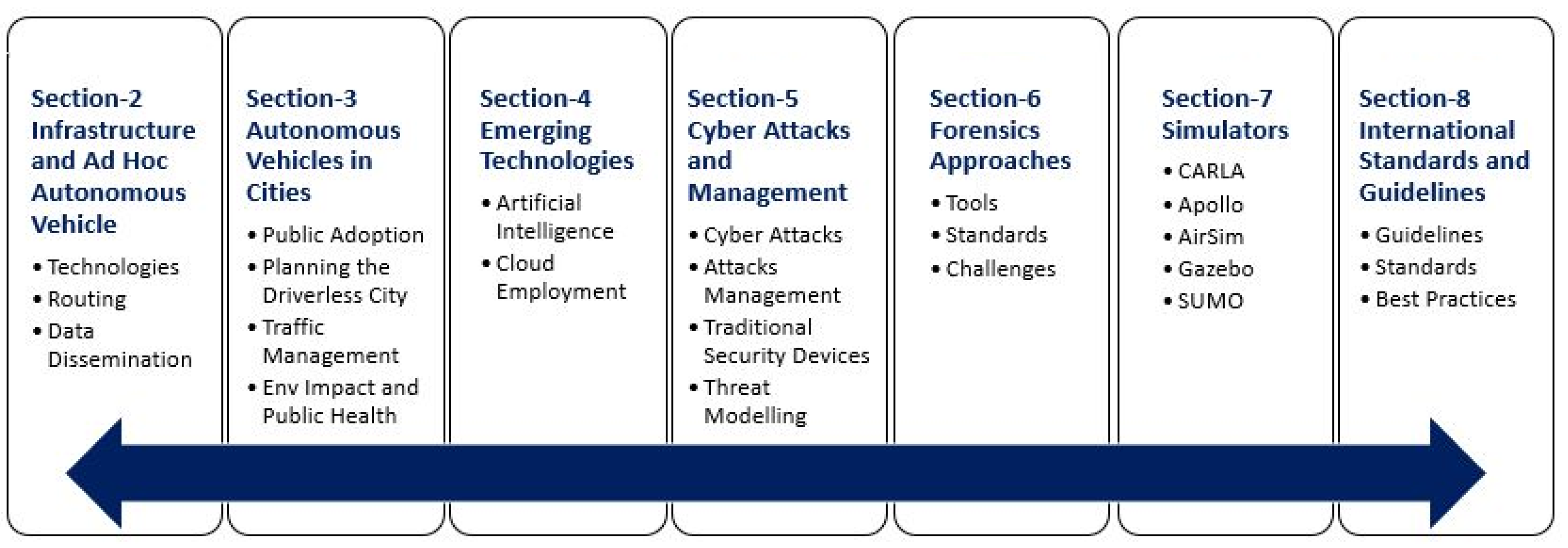
1.3. Organisation
2. Infrastructure and Ad Hoc Autonomous Vehicle
- 1.
- Improved Safety: By relying on physical infrastructure, infrastructure-based autonomous vehicles can use safety features such as traffic signals, road markings, and signs to make driving decisions and reduce the risk of accidents.
- 2.
- Increased Efficiency: Infrastructure-based autonomous vehicles can optimize their routes based on real-time traffic data and use dedicated autonomous vehicle lanes to reduce congestion and improve overall traffic flow.
- 3.
- Improved User Experience: Infrastructure-based autonomous vehicles can provide a more comfortable and convenient riding experience, using amenities such as rest stops, charging stations, and service facilities along the way. However, there are also some limitations to infrastructure-based autonomous vehicles [21], such as:
- •
- Cost: Implementing the necessary physical infrastructure can be expensive, and maintaining it can also be a high ongoing cost.
- •
- Limited Operating Environments: Infrastructure-based autonomous vehicles are limited to operating in areas with well-defined roads and traffic signals and may not be suitable for rural or off-road environments.
- •
- Dependence on Human Intervention: While infrastructure-based autonomous vehicles can use physical infrastructure to make driving decisions, they may still require human intervention in certain scenarios, such as system failure or road closure.
2.1. Technologies
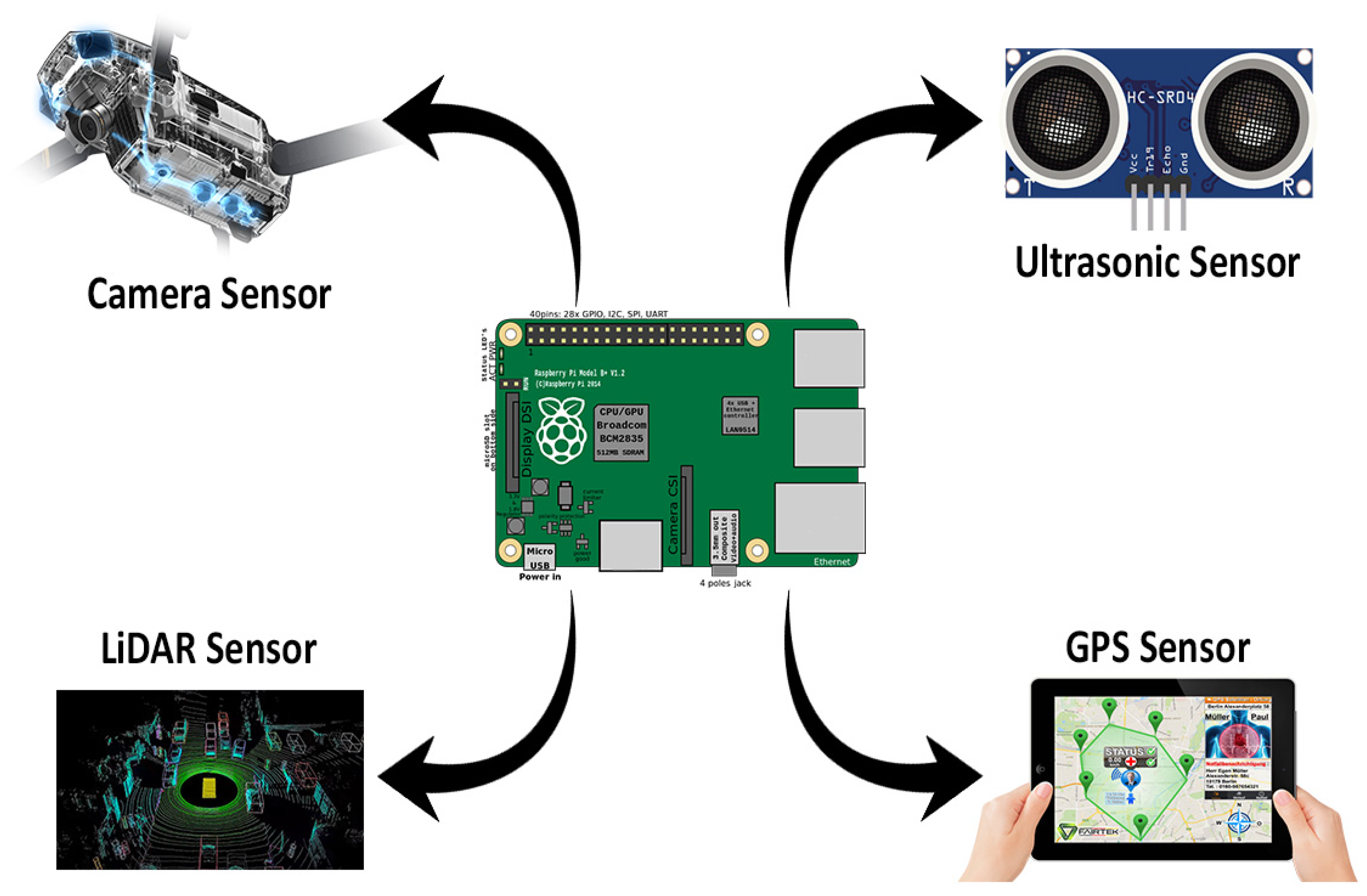
- Sensors: To observe and comprehend their environment, autonomous cars use a range of sensors, including cameras, LiDAR, radar, and ultrasonic sensors. These sensors give the vehicle information about its surroundings, such as the location, mobility of other cars, pedestrians, and obstacles [24].
- Computer Vision: Computer vision algorithms are used to process and analyze the data collected by the vehicle’s sensors. These algorithms help the vehicle to identify and track objects in its environment, as well as to understand their movement and behavior.
- Artificial Intelligence (AI) and Machine Learning: Algorithms based on machine learning and artificial intelligence are utilized to make choices and direct the vehicle’s activities. For example, they can be used to determine the vehicle’s best path to follow, predict the behavior of other road users, and react to unexpected events.
- GPS and Maps: GPS and high-definition maps are used to provide the vehicle with information about its location and help it navigate and avoid obstacles [25].
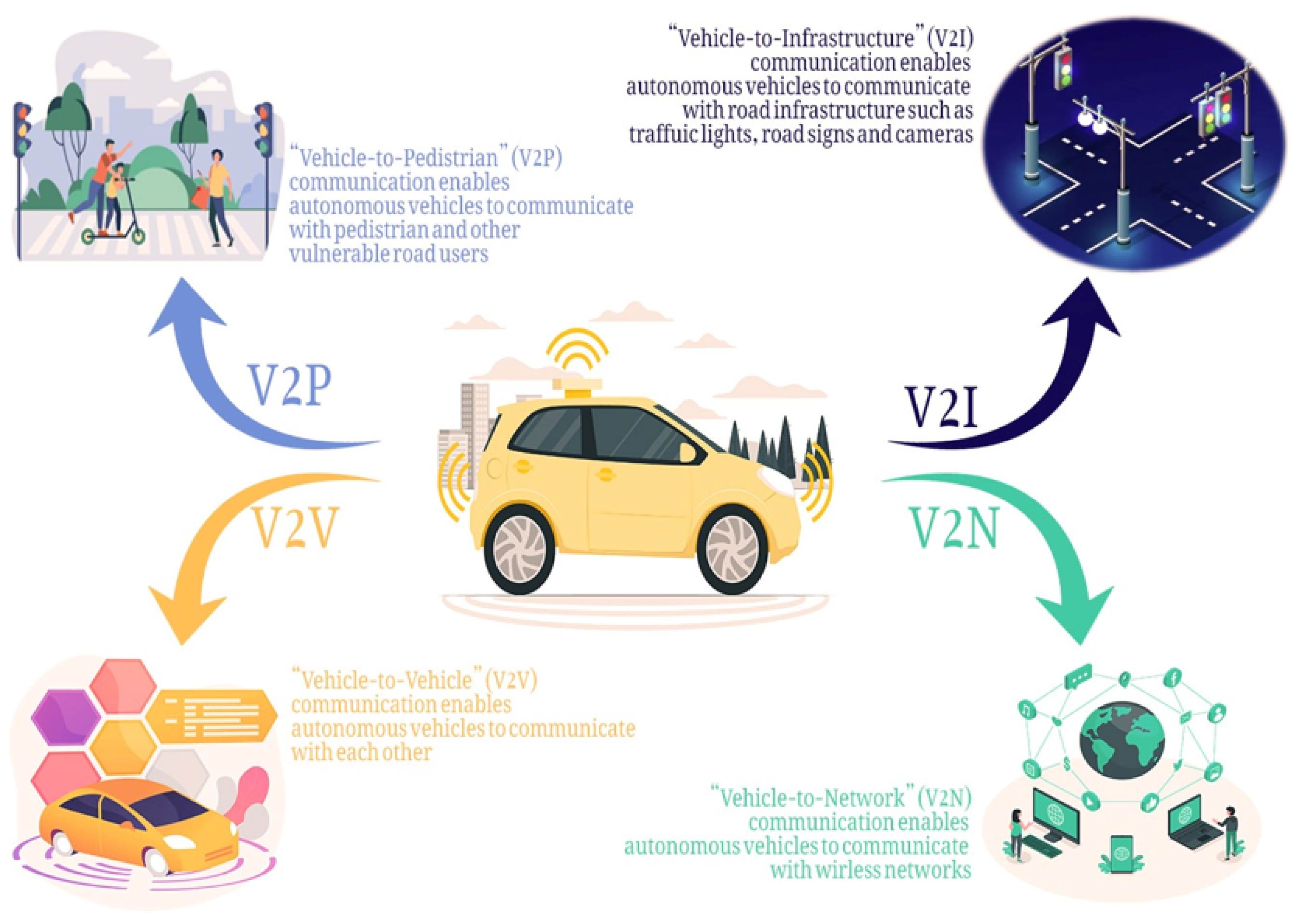
- Communication Systems: Autonomous vehicles use a variety of communication systems, such as cellular networks, dedicated short-range communication (DSRC), and Vehicle-to-Vehicle (V2V) and Vehicle-to-Infrastructure (V2I) communication, to exchange information with other vehicles, road infrastructure, and the cloud.
- Actuation Systems: Autonomous vehicles use actuation systems, such as electric motors, hydraulic actuators, and pneumatic systems, to control the vehicle’s movement and perform tasks such as steering, accelerating, and braking.
- Power and Energy Management Systems: Autonomous vehicles use power and energy management systems, such as batteries, fuel cells, and regenerative braking, to provide the vehicle with the energy needed to operate and optimize its energy efficiency.
2.2. Routing
- Traffic Conditions: The vehicle uses real-time traffic data to avoid congested areas and to select the fastest and most efficient route.
- Road Infrastructure: The vehicle considers the physical layout of the road network, including the presence of intersections, toll booths, and other road features when selecting a route.
- Obstacles: The vehicle uses its sensors to detect and avoid obstacles, such as other vehicles, pedestrians, and road work that may be present along the route.
- Safety: The vehicle considers the safety of its passengers and other road users when selecting a route. For example, it may avoid routes with a high incidence of accidents or with poor road conditions.
- Energy Efficiency: The vehicle considers the energy consumption of different routes and selects the route that minimizes energy usage.
2.3. Data Dissemination
3. Autonomous Vehicles in Smart Cities in a Nutshell
3.1. Public Adoption
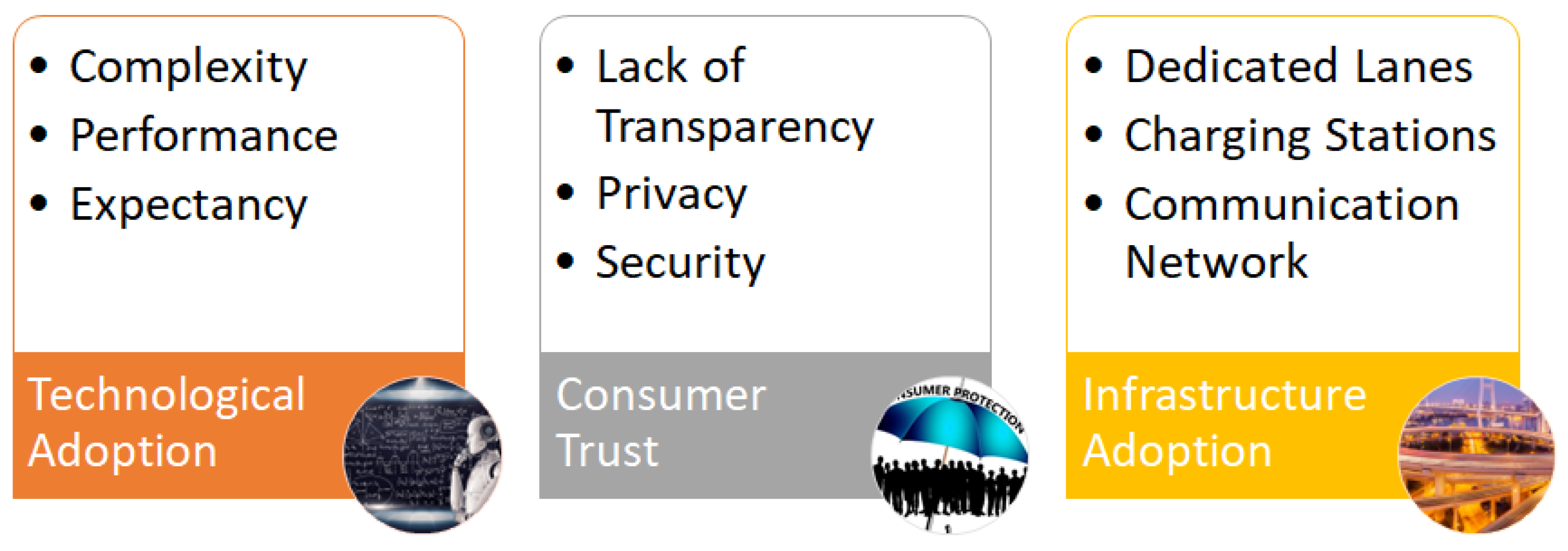
3.1.1. Technological Adoption
3.1.2. Consumer Trust
3.1.3. Infrastructure Adoption
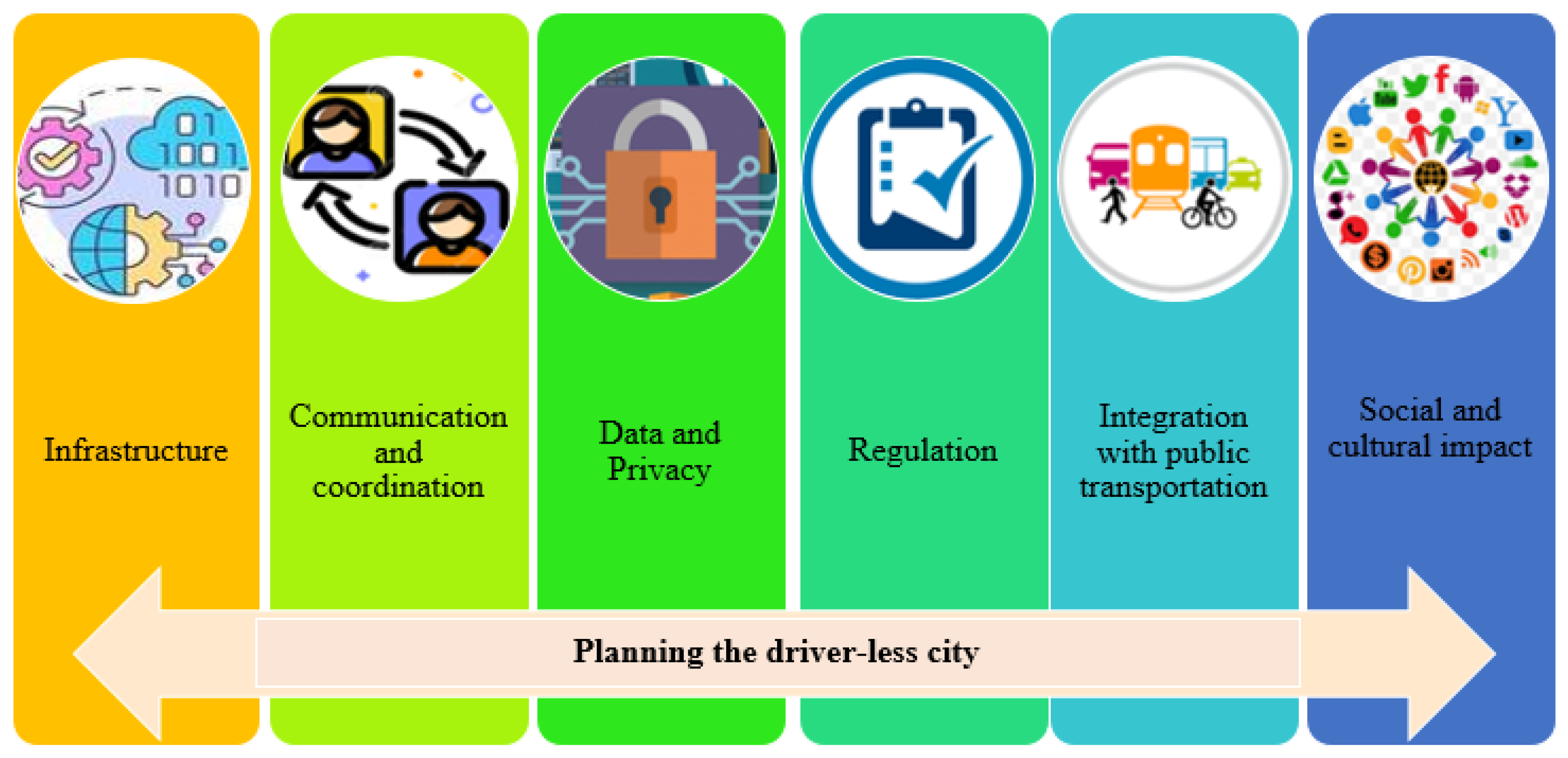
3.2. Planning the Driverless City
3.2.1. Infrastructure
3.2.2. Communication and Coordination
3.2.3. Data and Privacy
3.2.4. Regulation
3.2.5. Integration with Public Transportation
3.2.6. Social and Cultural Impact
3.3. Traffic Management
3.4. Environmental Impact and Public Health
4. Emerging Technologies
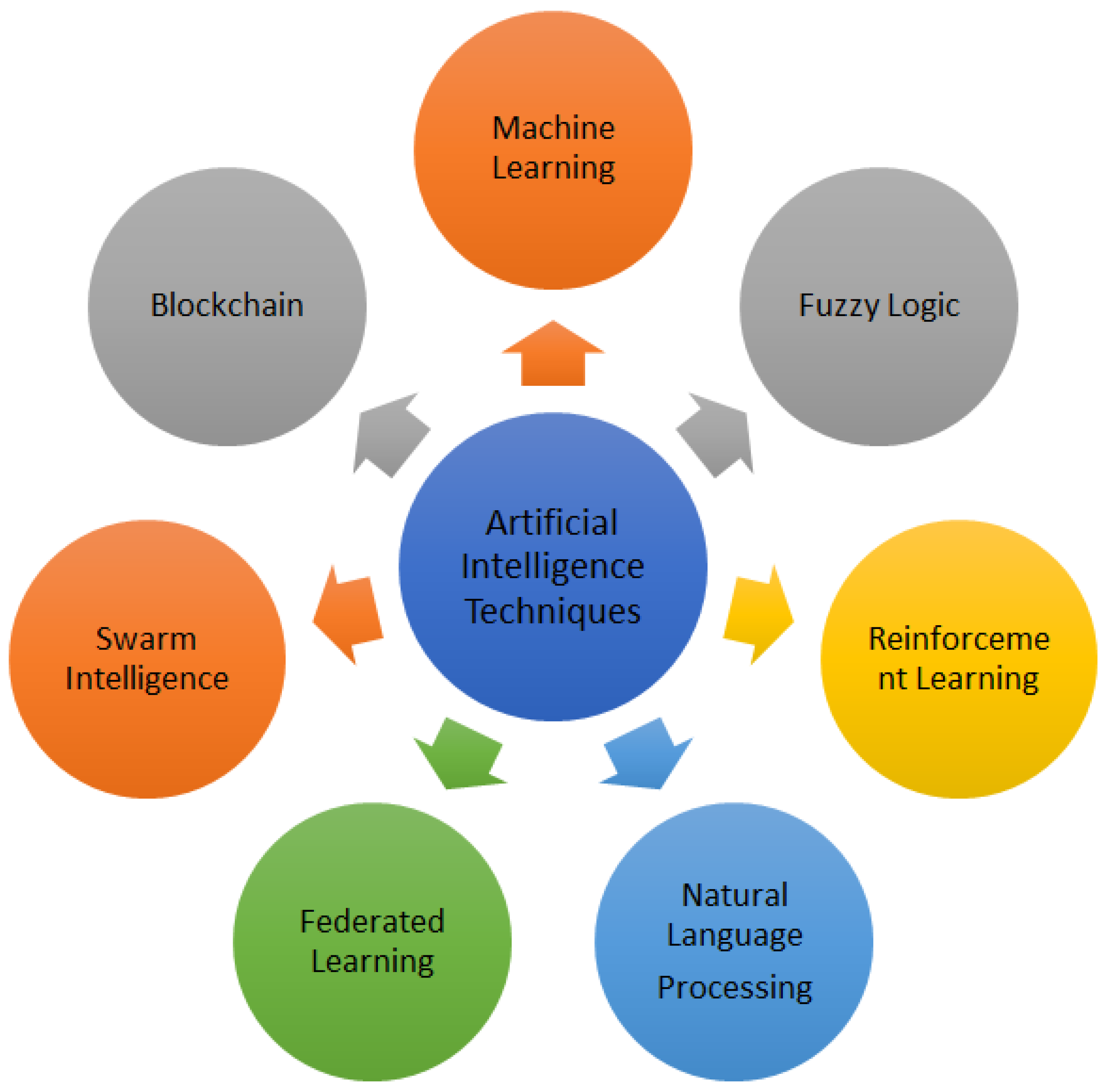
4.1. Artificial Intelligence Techniques
- Machine learning (ML) is utilized for anomaly detection, route optimization, and traffic prediction [56].
- Reinforcement learning (RL) is a technique for dynamic route planning and adaptive traffic control.
- Artificial neural networks (ANN) are used to identify, classify, and communicate about vehicles.
- Fuzzy logic is used to make safety-critical decisions like emergency braking.
- The use of genetic algorithms (GA) to improve network communication and energy efficiency.
- Swarm intelligence—utilized in platooning of vehicles for cooperative communication.
- Natural language processing (NLP)—utilized for hands-free operation and other human-vehicle interactions. Figure 5 shows the graphical representation of AI techniques.
4.1.1. Machine Learning
- Sensor Fusion: Autonomous vehicles use a variety of sensors, such as cameras, LiDAR, radar, and ultrasonic sensors, to learn about their surroundings [61]. Machine learning algorithms combine and interpret data from various sensors to create a more accurate and complete image of the area around the vehicle.
- Perception: Sensor data are analyzed by machine learning algorithms to identify environmental items like other cars, people, and traffic lights [62]. As a result, the autonomous car can comprehend its surroundings and decide what to do depending on them.
- Prediction: The behavior of other road users, such as pedestrians and automobiles, can be predicted using machine learning techniques. The vehicle’s path and any judgments regarding how to deal with other road users can be made using this knowledge [61].
- Control: Machine learning algorithms regulate the car’s movement, including steering, stopping, and acceleration. Combining supervised and reinforcement learning approaches can achieve this [63].
- Adaptive Cruise Control: Using sensor data to identify the speed and proximity of other vehicles and modify speed cyber accordingly, adaptive cruise control uses machine learning algorithms to adapt the vehicle’s speed. The creation of autonomous vehicles depends on machine learning. It makes it possible for these vehicles to navigate their surroundings safely and effectively. The development of autonomous vehicles uses various technologies, including machine learning. However, it is vital to remember that several obstacles must be overcome before they can be completely implemented on public roads.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Contribution Area | Evaluation Approach | Main Contribution | Evaluation Metrics | Findings |
|---|---|---|---|---|---|
| [64] | Object Detection | CNN-based Object Detection and Classification | Accuracy, Speed, Computational Complexity | Accuracy, Speed, Computational Complexity | Successful real-time object detection for autonomous vehicles |
| [65] | Collision Avoidance | Fuzzy Logic-based Risk Assessment | Safety, Reliability, Real-time Performance | Safety, Reliability, Real-time Performance | Effective collision avoidance system for autonomous vehicles |
| [66] | Decision-making | Reinforcement Learning for Driving Policies | Efficiency, Adaptability, Safety | Efficiency, Adaptability, Safety | Effective decision-making system for autonomous vehicles |
| [67] | Trajectory Planning | Genetic Algorithm for Optimal Trajectories | Feasibility, Optimality, Scalability | Feasibility, Optimality, Scalability | Optimal trajectory planning for autonomous vehicles |
| [68] | Voice Control | Natural Language Processing for Voice Commands | Accuracy, Usability, Robustness | Accuracy, Usability, Robustness | Successful voice-activated control for IoT |
4.1.2. Federated Learning
- Privacy and Data Security: Autonomous vehicles collect massive amounts of data, including sensor readings, images, and location information. These data are sensitive and subject to privacy regulations. Federated learning allows models to be trained locally on individual vehicles without transmitting raw data to a central server, thus preserving user privacy.
- Low Latency: Real-time decision-making is crucial for autonomous vehicles to navigate safely. Traditional methods of sending data to a central server for training and receiving updated models can introduce latency. With Federated Learning, models can be updated on the vehicle or within a localized network, reducing communication delays.
- Bandwidth Efficiency: Transmitting large amounts of data to a central server for training can be resource-intensive, especially in scenarios with limited network bandwidth [69]. Federated learning mitigates this issue by sending model updates instead of raw data, saving bandwidth and reducing the strain on communication networks.
- Adaptability: Autonomous vehicles operate in diverse environments and encounter many scenarios. Federated learning enables models to be trained on specific scenarios that individual vehicles encounter, leading to more accurate and robust models tailored to real-world conditions.
- Decentralization: Autonomous vehicles often operate independently or in groups. Federated learning fits well with this decentralized structure, allowing vehicles within a fleet to collaborate on model training without relying on a central authority.
- Heterogeneity: Vehicles in a fleet may have varying hardware capabilities, sensor configurations, and data distributions. Ensuring that models are effectively trained and generalized across this Heterogeneity can be challenging.
- Communication Overhead: Although federated learning reduces data transmission, communication is still required during model aggregation and synchronization. Managing this communication overhead efficiently is important.
- Data Drift: Over time, the data distribution that individual vehicles encounter may change due to varying driving conditions, road layouts, and more. Models need to adapt to this data drift to remain accurate and reliable.
- Model Aggregation: Combining the updates from various vehicles into a cohesive model while accounting for potential biases and anomalies is a complex task that requires careful algorithm design.
- Security: Federated learning introduces new security considerations, such as potential model poisoning attacks or malicious nodes. Ensuring the integrity of the model and the participants’ privacy is crucial.
- Promise, Despite these challenges, federated learning holds significant promise for improving the efficiency, privacy, and adaptability of machine learning models in autonomous vehicles. It is an area of active research and development, and its successful implementation could contribute to safer and more capable autonomous driving systems.
4.1.3. Blockchain
- Data Integrity and Security: Autonomous vehicles generate massive amounts of data from various sensors and systems. Blockchain’s decentralized and tamper-resistant nature can help ensure the integrity and Security of this data. It can prevent unauthorized access, tampering, or falsification of vehicle data, which is crucial for safety and reliability. Authors in [74] proposed a Blockchain-based framework to enhance the Security of connected and autonomous vehicles (CAVs). As CAVs become increasingly prevalent, ensuring their security and data integrity is paramount to preventing malicious attacks and accidents. A comprehensive framework has been proposed that demonstrates how Blockchain technology can be integrated into connected and autonomous vehicles to enhance Security, data integrity, and trust. The proposed framework can potentially address critical security concerns associated with CAVs, contributing to the safe deployment of these advanced vehicles on the roads.
- Supply Chain Management: Authors in [75] proposed that the Blockchain can track the entire supply chain of automotive components, ensuring transparency and authenticity. In the case of autonomous vehicles, which rely on advanced sensors and hardware, maintaining the integrity of components is essential for safety and performance.
- Vehicle Identity and Authentication: Blockchain can provide a secure and tamper-proof identity for each autonomous vehicle. This can help prevent vehicle identity theft, unauthorized modifications, and fraudulent activities related to vehicle registration and ownership.
- Smart Contracts for Mobility Services: Smart contracts, which are self-executing contracts with the terms directly written into code, can automate transactions and agreements between autonomous vehicles and other parties. For instance, vehicles could automatically pay for tolls, charging, or parking without human intervention.
- Decentralized Traffic Management: Blockchain can create a decentralized and secure traffic management system for autonomous vehicles. It could facilitate communication and coordination between vehicles, traffic infrastructure, and other stakeholders, optimizing traffic flow and safety. Authors in [76] presented an innovative approach to addressing data integrity and security challenges in autonomous vehicles through a Blockchain-inspired event recording system. By leveraging decentralized data organization, hashing, and time-stamping, the system aims to provide a trustworthy and tamper-resistant record of events for post-analysis, accountability, and overall system reliability.
- Data Sharing and Monetization: Autonomous vehicles generate valuable data that can be shared with other vehicles, infrastructure providers, and third-party applications. Blockchain can enable secure and controlled data sharing, allowing vehicle owners to monetize their data while retaining control over who accesses it.
- Insurance and Claims Processing: Blockchain’s transparency and traceability can simplify the insurance process for autonomous vehicles. Smart contracts could automatically trigger claims processing when predefined conditions (such as an accident) are met, speeding up the resolution process.
- Decentralized Car-Sharing and Rentals: Blockchain can support peer-to-peer car-sharing and rental platforms for autonomous vehicles. Smart contracts could manage reservations, payments, and access control without relying on intermediaries.
- V2X Communication: Vehicles-to-everything (V2X) communication is crucial for autonomous vehicles to interact with other vehicles and infrastructure. Blockchain can enhance the Security and privacy of these communications, preventing malicious attacks and unauthorized access.
4.1.4. Fuzzy Logic
4.1.5. Reinforcement Learning
4.1.6. Deep Reinforcement Learning
- Multi-Agent RL: This technique teaches autonomous vehicles how to communicate with other cars and pedestrians in a shared space. Multiple agents (like autonomous vehicles) can learn from one another and enhance their decision-making using this kind of RL. Multi-agent RL can teach autonomous vehicles to properly negotiate challenging traffic situations, such as roundabouts and intersections, according to research articles [95].
- Model-based RL (MBRL): Model-based RL techniques create better judgments for the RL agent by predicting the effects of various actions using a model of the environment. According to studies, MBRL can be used to increase the sample efficiency of RL algorithms, enabling the training of autonomous vehicles to happen more quickly and with fewer data [96]. The development and enhancement of RL algorithms that can help autonomous vehicles make prudent driving judgments has been the focus of recent research in RL for automobiles. This encompasses the application of model-based, multi-agent, and deep reinforcement learning approaches and the fusion of RL with other AI methodologies [97].
4.1.7. Genetic Algorithm
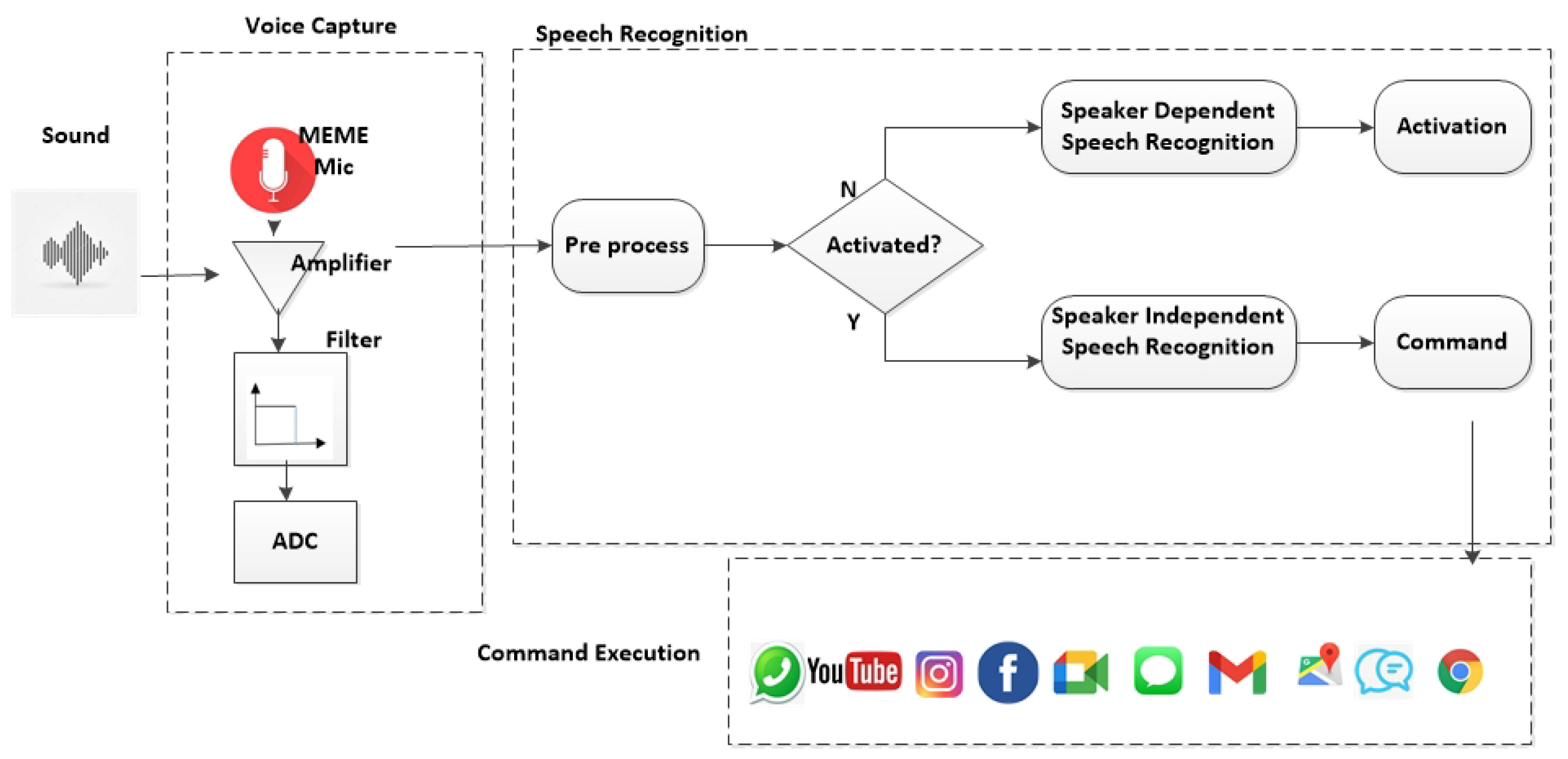
4.1.8. Natural Language Processing
4.1.9. Swarm Intelligence
4.2. Cloud Computing
Cloud Challenges in Autonomous Vehicles
4.3. Solar Power Electric Vehicles
- Decentralization: With VANETs, there is no need for a centralized charging station, which can reduce the cost of infrastructure and increase accessibility for EVs.
- Increased efficiency: By allowing EVs to charge from each other, the system can better use the available energy and reduce the need for additional energy generation.
- Reduced dependence on the grid: Solar-powered VANETs reduce the dependence on the grid, which can be beneficial in areas with unreliable or absent grid infrastructure.
- Increased energy security: Having multiple energy sources available in the VANET makes the system more resilient to failures and less susceptible to energy blackouts.
5. Cyber Attacks and Management
5.1. Cyber Attacks
5.1.1. Various Sensor Attacks
5.1.2. Ultrasonic Sensor Attacks
5.1.3. Light Detection and Ranging (LiDAR) Attacks
5.1.4. Attacks against Cameras
5.1.5. Attacks against GPS
5.1.6. In-Vehicle Protocol Attacks
5.1.7. Controller Area Network (CAN) Protocol Attack
5.1.8. Local Interconnect Network Protocol (LIN) Attack
5.1.9. Attacks against FlexRay
5.1.10. Voice Controllable Systems (VCS) Attack
5.1.11. Immobilizer Attack
5.1.12. Key-Less Entry Systems Attack
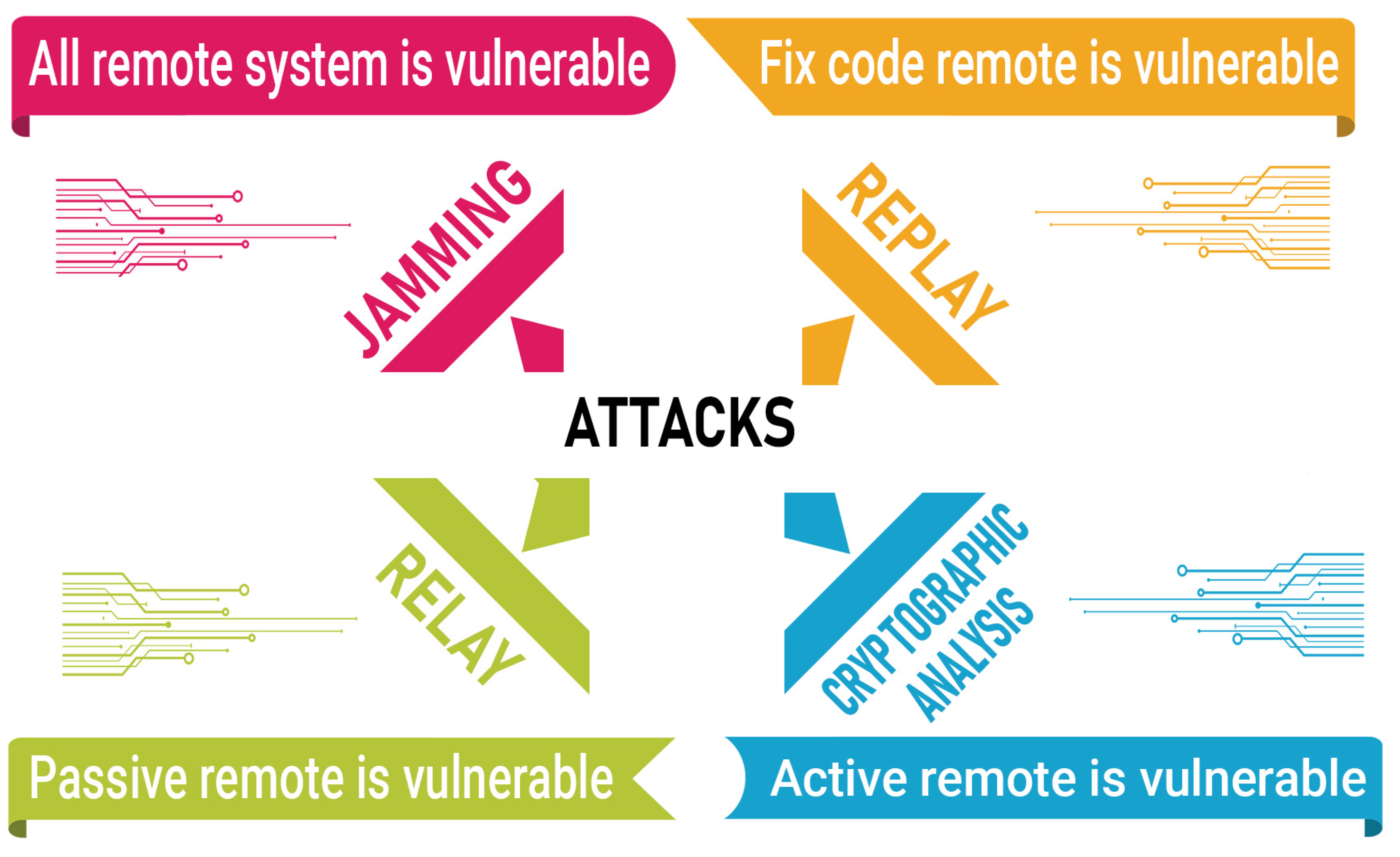
5.1.13. Jamming Attacks
5.1.14. Replay Attack
5.1.15. Relay Attack
5.1.16. Cryptographic Analysis Attack
5.2. Attacks Management
5.2.1. Defence Approaches for Sensors
- GPS: To prevent GPS-targeted attacks, a variety of defenses have been deployed. For instance, the false signals differ visually from those transmitted by satellites. Attacks that consider the signal’s power, the time between broadcasts, and the signal clock information could be detected using this method [168]. Ref. [186] utilized the receiver’s correlation function distortions to evaluate the GPS signal’s accuracy. Investigate the direction of arrival (DoA), which uses an antenna array to thwart attacks because the DoA of GPS signals would disclose a different carry phase than spoofing signals. Other methods use GPS broadcasts to embed cryptographic algorithms for assault defense. Encrypt GPS L1 P(Y) code to see if a spoofing attempt is being made. Authors in [187] recommended adopting methods like navigation message authentication (NMA), which integrates a signature into the satellite broadcast, to ensure the signals are authentic. Instead, research from other areas could be combined to attain protection, as with the distance-bounding protocol. They use computer vision or cryptography tools to measure and verify the distance between entities by comparing nearby buildings and road signs.
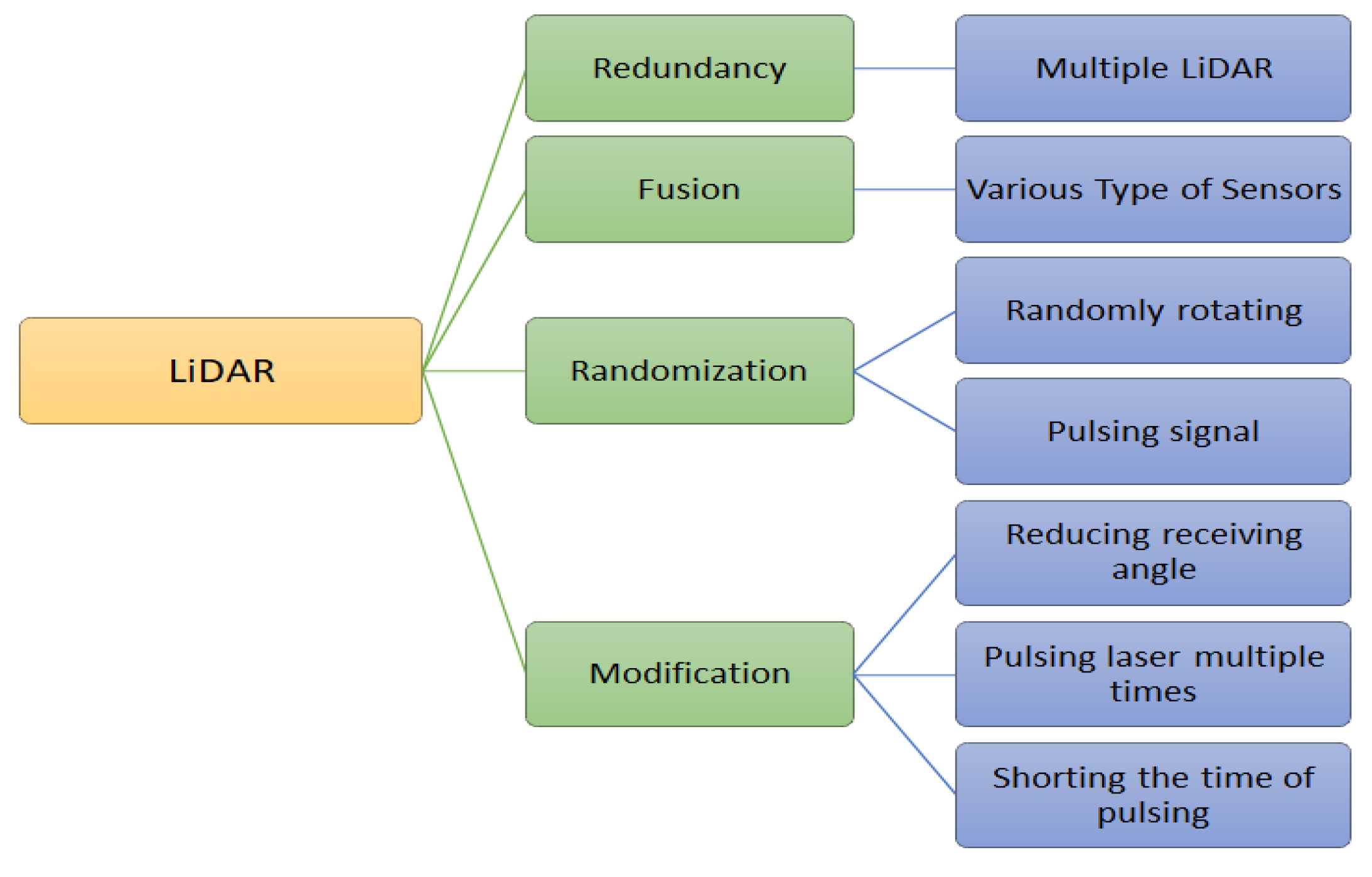
- LiDAR: Changing the way LiDAR transmits and receives light is one possible technique. If the adversary intends to carry out the attack effectively, they must coordinate the false laser with the LiDAR laser. Defensive strategies for LiDAR have been shown in Figure 10. The LiDAR laser can prevent an assailant by repeatedly firing laser pulses in one direction, say three times. As LiDAR can only receive lasers from a fixed angle while rotating, limiting the impact of attacks by reducing the receiving angle is possible; however, doing so also lowers LiDAR’s sensitivity. Another defense is to shorten the LiDAR receiving time, shortening the LiDAR probe’s range. LiDAR determines the reception period it receives incoming lasers to ensure assurance. It is possible to invalidate lasers reflected off of additional objects while also making it difficult for attackers to begin attacks by, in particular, reducing the reception time. While using LiDAR, randomness can also be introduced. LiDAR is designed to rotate randomly and create lasers in any direction to ward off threats since it spins the transceiver to scan the area. Making the laser from a LiDAR is less predictable than producing random signals or signals with random pulse intervals, another effective defense against a hacker [154]. Last but not least, redundant or multi-sensory LiDARs allow autonomous vehicles to modify LiDAR results(s). As a result, the attacks grow more costly and sophisticated, and clients pay more to install new devices. Furthermore, there will not be any overlap when the attack is launched.
- Camera: Due to the camera’s vulnerability brought on by its optical characteristics, it is challenging to design a completely secure camera. Redundancy, for some threats, photochromic lenses and removable near-infrared cut filters may be sufficient [4], despite any potential weaknesses or new problems they may create.
- Ultrasonic sensors: The first technique allows for the authentication of physical signals by utilizing the idea of changing waveform properties. The second method uses two or more sensors to identify attackers, regain the ability to recognize obstacles and identify attacks [188].
5.2.2. Defence Approaches for In-Vehicle Systems
5.2.3. Defence Approaches for In-Vehicle Protocols
5.3. Traditional Security Devices
5.4. Threat Modeling Approaches
5.5. Authentication Schemes
5.5.1. Public Key Infrastructure (PKI) Based Schemes
5.5.2. Hardware-Based Authentication
5.5.3. BiometricBased Authentication
5.5.4. Secure Boot
5.5.5. Remote Attestation
5.6. Over-The-Air (OTA) Updates
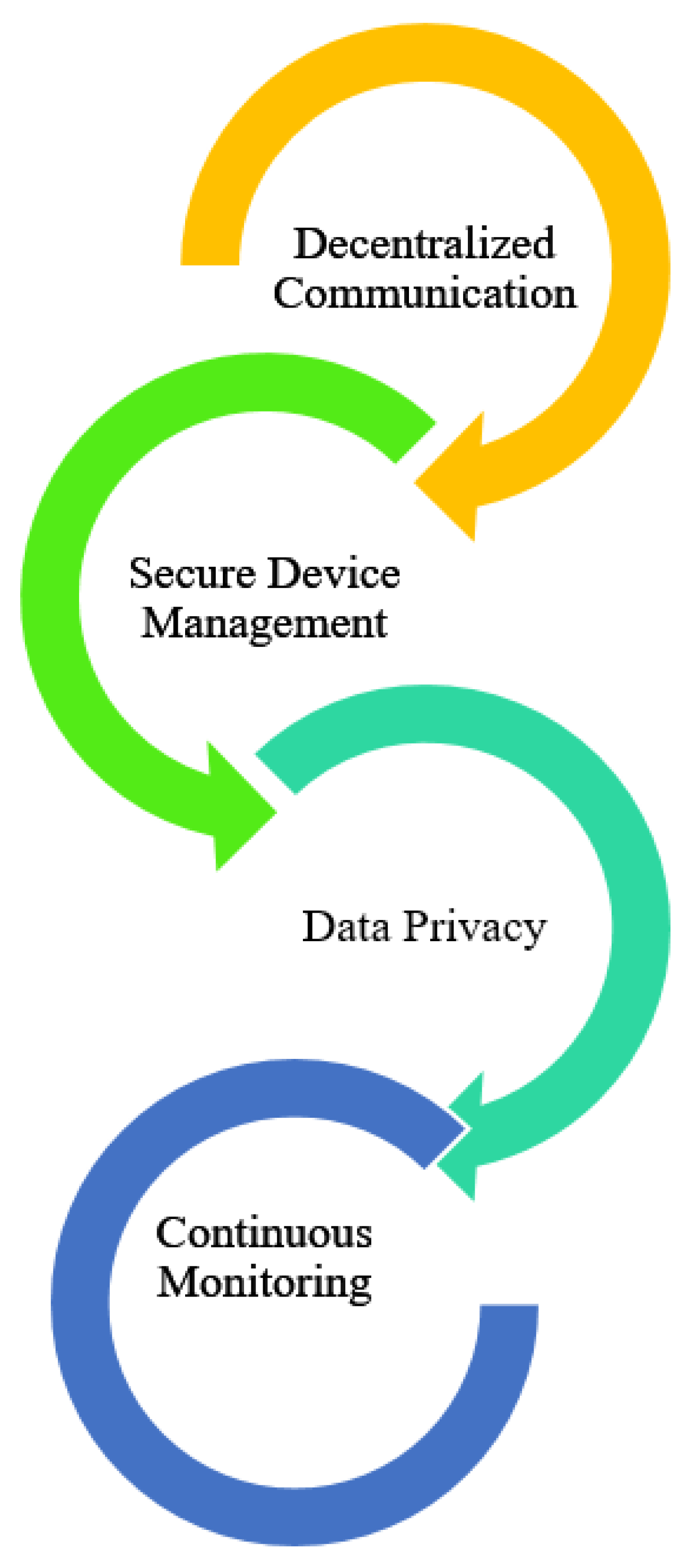
5.7. Zero-Trust Architecture
5.7.1. Decentralized Communication
5.7.2. Secure Device Management
5.8. Data Privacy
6. Forensics Approaches
6.1. Forensic Tools
6.2. Forensics Standards for Autonomous Vehicles
6.3. Forensics Challenges in Autonomous Vehicles
- How can we identify which information should be kept onboard the car and which should be stored on the cloud?
- What software program or architecture is suitable for collecting a large volume of online and offline data simultaneously without endangering its integrity?
- Which software and programs are suitable for collecting the data live or offline without compromising its integrity?
- What location does the internal data storage have? RAM, USB drive, EPROM, or flash memory.
- On-the-fly data collecting and analysis by CAVs may utilize a variety of processing protocols. How are these kinds of data handled?
- Critical evidence is invalidated if the evidence is not sealed before the files are opened.
- To comprehend their surroundings and operate effectively, CAVs must scan their surroundings; nevertheless, mapping private property may be viewed as an intrusion. Clear criteria must be established for what data CAVs can collect and maintain to protect privacy.
- For gathering digital evidence and a solid understanding of the software, hardware, and networks, specialists need to have solid expertise and specialized abilities. Therefore, technicians need extensive training in technical capabilities and legal procedures before being involved in CAV forensics.
7. Simulators
7.1. CARLA
- A sizable, intricate urban area including streets, buildings, traffic lights, and other elements typical of cities.
- Realistic lighting and weather conditions, including varying day lengths, seasons, and weather phenomena like snow, rain, and fog [230].
- Support for various sensors, including LiDAR, radar, and cameras, which may be set up to imitate various sensor kinds and noise levels.
- A scenario system that is flexible and adaptable, enabling developers to generate and test a variety of situations, including various traffic densities, driving behaviors, and weather conditions.
- A Python API that makes it simple for developers to build custom agents and behaviors and control and interact with the simulation [231].
- Support for the Open DRIVE format enables simulation developers to import actual road networks.
- Support for the Unreal Engine enables physics-based interactions between agents and realistic graphics.
7.2. Apollo
- The Apollo Simulator is a physics-based, highly realistic simulator that may be used to test and create autonomous vehicle systems. It supports several sensors, including LiDAR, radar, and cameras, and contains a variety of realistic landscapes [232].
- Perception is a module collection that analyzes sensor data and identifies environmental items such as lane markers, traffic lights, and other cars.
- Planning is a collection of modules for creating plans for the vehicle’s motion, such as trajectory and path planning.
- Control, A group of modules that carry out instructions and manage the vehicle’s motion, including low-level steering, throttle, and braking controllers [123].
- HD Map is a high-definition map that can give the car precise information about its surroundings, such as the road’s geometry, lane markings, and traffic lights.
- Cybersecurity is a collection of modules to protect autonomous vehicle systems against cyberattacks.
- Cloud-based services is a group of cloud-based services that can be used to remotely access the car and store and exchange data [36].
7.3. AirSim
- Realistic settings is an AirSim that offers a range of settings, such as urban, rural, and natural settings, which can be utilized to assess the effectiveness of autonomous systems in various contexts [233].
- AirSim supports cameras, LiDAR, and GPS sensors, which can be set up to simulate various sensor kinds and noise levels.
- Interactions that are based on physics: AirSim models the physics of flight, including wind, turbulence, and other elements that may have an impact on how well aerial vehicles perform.
- AirSim enables programmers to design and test various scenarios, including weather, illumination, and traffic density conditions [234].
- AirSim offers a Python API that makes it simple for developers to build, manage, and interact with the simulation [235].
- AirSim allows testing of fleet-based or swarm-based systems by simulating many vehicles simultaneously.
7.4. Gazebo
- Gazebo models 3D physics-based simulations such as robotic system dynamics, including the impact of gravity, friction, and collisions.
- It features a range of settings, including urban, rural, and natural ones, which can be used to assess how well robotic systems function in various contexts [236].
- It features support for cameras, LiDAR, and GPS sensors, which may be customized to imitate a variety of sensor kinds and noise levels.
- With Gazebo, developers can design and test a variety of situations, such as those with varying weather, lighting, and traffic volumes.
- It has C++, Python, and MATLAB APIs that make it simple for developers to build, manage, and interact with the simulation [237].
- Simulating numerous robots at once is supported by Gazebo, which makes it possible to test swarm- or fleet-based systems.
- Gazebo offers a plugin architecture that enables programmers to design unique plugins to provide new features or alter the simulation’s behavior.
7.5. SUMO
- SUMO replicates individual vehicle movement on the road network while considering traffic lights, signs, and other traffic regulations.
- It contains a range of settings, such as urban, suburban, and rural settings, which can be utilized to test the effectiveness of traffic systems in various contexts [238].
- Simulating a wide range of traffic scenarios with support for diverse vehicle kinds, traffic densities, and traffic patterns is possible with SUMO.
- It offers C++, Python, and Java APIs that make it simple for developers to build, manage, and interact with the simulation [239].
- It is capable of simulating a variety of forms of transportation, including trains, buses, bicycles, and pedestrians, in addition to automobiles and buses.
- SUMO has a plugin architecture that enables programmers to build unique plugins to include new features or alter the simulation’s behavior.
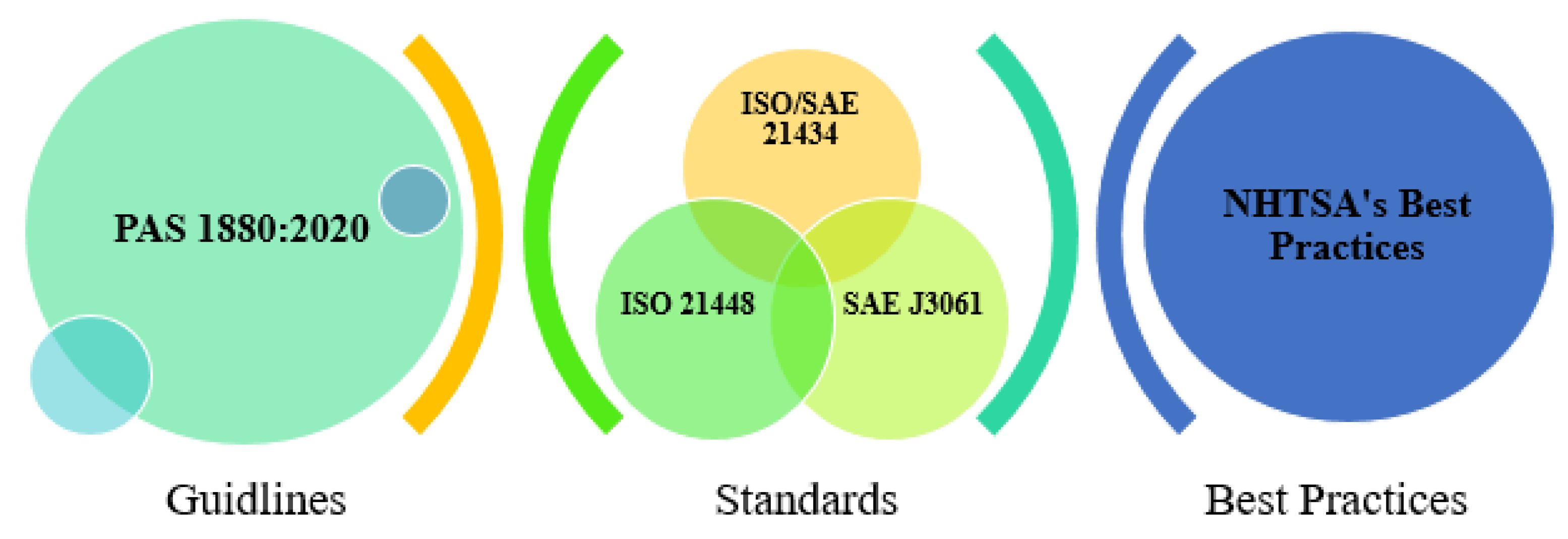
8. International Standards and Guidelines
8.1. Guidelines for Improving AVs Security
- Protect the software and hardware components by ensuring that every piece of hardware and software has been properly tested for vulnerabilities and developed with security in mind.
- Encrypt all data: To avoid unauthorized access or theft, any data sent through the vehicle or kept there should be encrypted.
- Watch over and restrict access: Establish rigorous access restrictions and keep a close eye on all communications going to and coming from the vehicle. Update software frequently: Update the software frequently to repair flaws and enhance security features.
- Implement cybersecurity measures: To identify and stop cyberattacks, employ cybersecurity measures such as firewalls and intrusion detection systems [244].
- Conduct penetration testing: To find and fix system vulnerabilities, conduct penetration testing regularly.
- Plan for response and recovery: Create a thorough response strategy that addresses reporting events and restoring systems during a security breach.
- Users should be informed about the value of security and the best practices for operating the vehicle safely and securely.
8.2. Guidelines for End Users
- Before using the vehicle, familiarize yourself with the operating instructions and safety precautions by reading the manual.
- Recognize the vehicle’s limitations: Autonomous vehicles are not fault-proof and are still susceptible to errors. Be conscious of the vehicle’s capabilities and limitations at all times.
- Know when to take control: In some circumstances, autonomous vehicles may ask you to take the wheel. Knowing when and how to drive safely while doing so is crucial [245].
- Always buckles up: Even if you are not driving, buckle up when you ride in an autonomous car.
- Update the vehicle’s software frequently to guarantee that you have access to the most recent security and safety features.
- Avoid attempting to modify or meddle with the vehicle’s systems because doing so could harm the vehicle’s performance and safety [244].
- Inform the manufacturer or your local authorities immediately if you experience any problems or issues with the car.
- Prepare for crises by becoming familiar with your vehicle’s emergency protocols and being ready to act if necessary [246].
9. Research Challenges, Open Issues, and Future Directions
9.1. Challenges
- Privacy and Security Issues: Autonomous vehicles (AVs) raise several privacy and security concerns that must be addressed to ensure this technology’s safe and responsible development and deployment. These issues include data privacy, cybersecurity, unauthorized access, liability, and social implications. To mitigate these risks, policymakers, industry leaders, and privacy advocates must work together to develop regulations, standards, and best practices that prioritize protecting privacy and security while promoting the development of this innovative technology [200].
- Data Quality: Data quality is a critical issue in autonomous vehicles (AVs) because the performance and safety of these vehicles depend on the accuracy and reliability of the data they collect and use. AVs generate vast amounts of data from sensors, cameras, and other sources, which must be accurate and consistent to ensure proper functioning. Poor data quality can result in errors in navigation, perception, and decision-making, leading to accidents or other safety issues. Manufacturers must implement robust data management processes, including data cleaning, validation, and verification to ensure data quality in AVs. They must also ensure that their sensors and systems are properly calibrated and regularly maintained to prevent data drift and degradation. Furthermore, it is crucial that the data used to train AVs is diverse and representative of different scenarios to avoid bias and ensure that the vehicles can operate safely in various environments. Ultimately, ensuring high-quality data in AVs is essential for these vehicles’ safe and reliable operation and building trust in this emerging technology.
- Lack of Interpretability: One of the significant challenges with autonomous vehicles (AVs) is the lack of interpretability or explainability of their decision-making processes. AVs rely on complex artificial intelligence (AI) algorithms to perceive the environment, make decisions, and execute actions. However, these algorithms often operate as black boxes, meaning it is difficult or impossible to understand how they arrive at their decisions. This lack of interpretability raises significant safety, ethical, and legal concerns. For example, it may be difficult to determine why the AV made a particular decision in an accident, making it challenging to assign liability [200]. Additionally, the lack of interpretability can result in biases, errors, or unexpected behaviors that are difficult to diagnose or correct. To address this issue, researchers are exploring various techniques for improving the interpretability of AI algorithms, such as developing explainable AI models or integrating visualization tools to make the decision-making process more transparent. These efforts will be crucial in building trust in AVs and ensuring their safe and responsible deployment.
- Real-Time Decisions: It is a critical challenge for autonomous vehicles (AVs) as they must be able to process and respond to complex and dynamic environments quickly and accurately. AVs rely on a wide range of sensors, cameras, and other inputs to perceive the environment, and they must analyze this information in real time to make decisions and take action. This requires sophisticated algorithms and computing systems that can process vast amounts of data quickly and accurately. However, even with advanced technology, there are still challenges in real-time decision-making for AVs. For example, unexpected scenarios or events, such as a pedestrian suddenly crossing the road, can pose challenges for AVs that may have yet to encounter similar situations before [8]. Additionally, real-time decision-making in AVs must consider a wide range of factors, such as safety, efficiency, and passenger comfort, which can be difficult to balance in real-time. To address these challenges, researchers are developing advanced AI algorithms and machine-learning techniques that can improve real-time decision-making in AVs. Additionally, there is a need for ongoing testing and validation to ensure that AVs can operate safely and efficiently in dynamic environments. Ultimately, developing effective real-time decision-making capabilities in AVs is essential for their safe and reliable operation and for realizing the full potential of this technology.
- Generation of Class Labels in Real-Time: The generation of class labels in real-time is an important challenge for autonomous vehicles (AVs) because it is necessary for them to accurately identify and classify objects in the environment to make appropriate decisions. Class labels identify objects or entities, such as pedestrians, cars, or traffic signs, based on their characteristics and attributes. AVs rely on many sensors, including cameras and LiDAR, to detect and classify objects in real-time. However, this process can be challenging because of the complexity and variability of the environment. For example, objects may be partially occluded or have similar appearances, making it difficult to distinguish between them. To address this challenge, researchers are developing advanced computer vision and machine-learning algorithms to improve object detection, classification accuracy, and speed in real-time [247]. These algorithms use deep learning techniques to learn from large amounts of labeled data and can adapt to new scenarios and environments. Additionally, researchers are exploring using sensor fusion techniques, such as combining data from multiple sensors, to improve the reliability and robustness of object detection and classification. Ultimately, generating accurate class labels in real-time is essential for AVs’ safe and effective operation, and ongoing research is needed to continue improving this capability.
- Handling Big Data: Autonomous vehicles (AVs) generate vast amounts of data from sensors, cameras, and other sources, which presents significant challenges for handling big data. AVs must be able to process, store, and transmit this data in real-time to enable perception, decision-making, and action execution. This requires sophisticated computing systems and data management processes that can handle large volumes of data efficiently and reliably. Additionally, AVs must be able to analyze this data to detect patterns, learn from experience, and adapt to new environments [248].
- Enabled Network Intelligence: The challenge of enabling network intelligence in autonomous vehicles (AVs) is establishing robust communication networks to support the complex data flows required for AV operation. AVs generate and transmit vast amounts of data, including sensor data, traffic information, and mapping data, which must be processed and analyzed in real-time. This requires advanced communication networks that can handle high volumes of data, provide low-latency communication, and ensure reliable connectivity even in challenging environments.
- ECO-friendly technologies: Adopting eco-friendly technologies in autonomous vehicles (AVs) is an important challenge because it is necessary to reduce the environmental impact of AVs while improving their safety and performance. AVs have the potential to reduce carbon emissions and improve energy efficiency, but they also require significant amounts of energy to operate and generate emissions during production and disposal [5].
- Context and situation awareness: Context and situation awareness are critical challenges for autonomous vehicles (AVs) as they require AVs to perceive their surroundings, interpret the context of the environment, and make decisions based on that context. This challenge can be addressed using sensor fusion algorithms that combine data from multiple sensors to provide a complete picture of the environment. Machine-learning techniques can then be applied to this data to interpret it in real time and enable AVs to make decisions based on this understanding. Additionally, advancements in computer vision and natural language processing technologies can help AVs better understand and interpret their environment, allowing for improved context and situation awareness [10].
9.2. Future Directions
- Public Adoption: Investigate strategies to increase public trust and acceptance of autonomous vehicles through public awareness campaigns, educational programs, and transparent communication about the benefits and safety measures. Conduct pilot programs and field studies to understand user preferences, concerns, and expectations and incorporate this feedback into the design and development of autonomous vehicle systems. Collaborate with policymakers and regulatory bodies to establish guidelines and regulations that ensure the safe and responsible deployment of autonomous vehicles while addressing public concerns.
- Driverless City Planning: Develop frameworks for integrating autonomous vehicles into urban infrastructure, including dedicated lanes, parking facilities, and charging stations. Conduct urban simulations and case studies to optimize the placement of autonomous vehicle infrastructure, considering factors such as traffic flow, accessibility, and environmental impact. Collaborate with urban planners and transportation agencies to create comprehensive plans for driverless city planning, considering factors like pedestrian safety, last-mile connectivity, and multi-modal transportation integration.
- Traffic Management: Develop intelligent traffic management systems that can effectively integrate autonomous vehicles with conventional vehicles, improving traffic flow, reducing congestion, and enhancing overall transportation efficiency. Investigate cooperative vehicle-to-vehicle and vehicle-to-infrastructure communication systems for real-time traffic coordination, enabling efficient lane merging, traffic signal optimization, and dynamic routing. Implement smart traffic management infrastructure, such as sensors and adaptive traffic control systems, to support autonomous vehicles’ safe and efficient operation.
- Environmental Impact: Research to quantify the environmental impact of autonomous vehicles, considering factors such as energy consumption, emissions, and materials used in manufacturing. Explore the potential of autonomous vehicle technologies, such as vehicle-to-grid integration and energy-efficient driving algorithms, to minimize environmental impact and promote sustainability. Collaborate with energy providers and policymakers to develop incentives and infrastructure for electric and alternative fuel-powered autonomous vehicles, reducing reliance on fossil fuels.
- Public Health and Safety: Study the impact of autonomous vehicles on public health and safety, focusing on areas such as reduced traffic accidents, improved emergency response times, and enhanced accessibility for individuals with mobility challenges. Develop comprehensive safety protocols, including fail-safe mechanisms, advanced driver assistance systems, and real-time monitoring of autonomous vehicle operations. Collaborate with public health agencies and emergency services to establish guidelines for emergency management in autonomous vehicle scenarios, ensuring effective coordination and response during incidents.
- Social and Economic Implications: Investigate the socio-economic effects of the widespread adoption of autonomous vehicles, including job displacement, changes in transportation-related industries, and economic disparities. Study the potential for autonomous vehicles to enhance mobility access for underserved communities, providing solutions for transportation deserts and improving equity in urban and rural areas. Collaborate with policymakers and urban planners to address social implications and develop inclusive policies that ensure fair access to autonomous transportation for all segments of society.
- International Standards and Collaboration: Work toward international harmonization of standards and regulations for autonomous vehicles, facilitating interoperability, safety, and cross-border operations. Foster collaboration between researchers, industry stakeholders, and regulatory bodies to share best practices, exchange knowledge, and address global challenges related to autonomous vehicle development and deployment. Establish partnerships and collaborations on a global scale to facilitate data sharing, technology transfer, and joint research initiatives for autonomous vehicle systems.
10. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Alsaid, A.; Lee, J.D.; Noejovich, S.I.; Chehade, A. The Effect of Vehicle Automation Styles on Drivers’ Emotional State. IEEE Trans. Intell. Transp. Syst. 2023, 24, 3963–3973. [Google Scholar] [CrossRef]
- Allied Market Research. Autonomous Vehicle Market by Level of Automation, Component, and Application: Global Opportunity Analysis and Industry Forecast, 2019–2026. 2020. Available online: https://www.alliedmarketresearch.com/autonomous-vehicle-market (accessed on 12 March 2023).
- Yang, G.; Xue, Y.; Meng, L.; Wang, P.; Shi, Y.; Yang, Q.; Dong, Q. Survey on autonomous vehicle simulation platforms. In Proceedings of the 2021 8th International Conference on Dependable Systems and Their Applications (DSA), Yinchuan, China, 5–6 August 2021; pp. 692–699. [Google Scholar]
- Cui, J.; Liew, L.S.; Sabaliauskaite, G.; Zhou, F. A review on safety failures, security attacks, and available countermeasures for autonomous vehicles. Ad Hoc Netw. 2019, 90, 101823. [Google Scholar] [CrossRef]
- Khan, M.A.; Nasralla, M.M.; Umar, M.M.; Iqbal, Z.; Rehman, G.U.; Sarfraz, M.S.; Choudhury, N. A survey on the noncooperative environment in smart nodes-based Ad Hoc networks: Motivations and solutions. Secur. Commun. Netw. 2021, 2021, 9921826. [Google Scholar] [CrossRef]
- Kim, S.; Shrestha, R. Security and Privacy in Intelligent Autonomous Vehicles. In Automotive Cyber Security; Springer: Berlin/Heidelberg, Germany, 2020; pp. 35–66. [Google Scholar]
- Saab, S.S.; Shen, D.; Orabi, M.; Kors, D.; Jaafar, R.H. Iterative learning control: Practical implementation and automation. IEEE Trans. Ind. Electron. 2021, 69, 1858–1866. [Google Scholar] [CrossRef]
- Anita, E.M.; Jenefa, J. A survey on authentication schemes of VANETs. In Proceedings of the 2016 International Conference on Information Communication and Embedded Systems (ICICES), Chennai, India, 25–26 February 2016; pp. 1–7. [Google Scholar]
- Parekh, D.; Poddar, N.; Rajpurkar, A.; Chahal, M.; Kumar, N.; Joshi, G.P.; Cho, W. A review on autonomous vehicles: Progress, methods and challenges. Electronics 2022, 11, 2162. [Google Scholar] [CrossRef]
- Aradi, S. Survey of deep reinforcement learning for motion planning of autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 23, 740–759. [Google Scholar] [CrossRef]
- Faisal, A.; Kamruzzaman, M.; Yigitcanlar, T.; Currie, G. Understanding autonomous vehicles. J. Transp. Land Use 2019, 12, 45–72. [Google Scholar] [CrossRef]
- Ahangar, M.N.; Ahmed, Q.Z.; Khan, F.A.; Hafeez, M. A survey of autonomous vehicles: Enabling communication technologies and challenges. Sensors 2021, 21, 706. [Google Scholar] [CrossRef]
- Duarte, F.; Ratti, C. The impact of autonomous vehicles on cities: A review. J. Urban Technol. 2018, 25, 3–18. [Google Scholar] [CrossRef]
- Gkartzonikas, C.; Gkritza, K. What have we learned? A review of stated preference and choice studies on autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2019, 98, 323–337. [Google Scholar] [CrossRef]
- Ma, Y.; Wang, Z.; Yang, H.; Yang, L. Artificial intelligence applications in the development of autonomous vehicles: A survey. IEEE/CAA J. Autom. Sin. 2020, 7, 315–329. [Google Scholar] [CrossRef]
- Pham, M.; Xiong, K. A survey on security attacks and defense techniques for connected and autonomous vehicles. Comput. Secur. 2021, 109, 102269. [Google Scholar] [CrossRef]
- Kim, K.; Kim, J.S.; Jeong, S.; Park, J.H.; Kim, H.K. Cybersecurity for autonomous vehicles: Review of attacks and defense. Comput. Secur. 2021, 103, 102150. [Google Scholar] [CrossRef]
- Janai, J.; Güney, F.; Behl, A.; Geiger, A. Computer vision for autonomous vehicles: Problems, datasets and state of the art. Found. Trends Comput. Graph. Vis. 2020, 12, 1–308. [Google Scholar] [CrossRef]
- Wuthishuwong, C.; Traechtler, A. Vehicle to infrastructure based safe trajectory planning for Autonomous Intersection Management. In Proceedings of the 2013 13th international conference on ITS telecommunications (ITST), Tampere, Finland, 5–7 November 2013; pp. 175–180. [Google Scholar]
- Agrawal, S.; Elger, G. Concept of infrastructure based environment perception for in2lab test field for automated driving. In Proceedings of the 2021 IEEE International Smart Cities Conference (ISC2), Manchester, UK, 7–10 September 2021; pp. 1–4. [Google Scholar]
- Liu, S.; Yu, B.; Tang, J.; Zhu, Y.; Liu, X. Communication challenges in infrastructure-vehicle cooperative autonomous driving: A field deployment perspective. IEEE Wirel. Commun. 2022, 29, 126–131. [Google Scholar] [CrossRef]
- Akabane, A.T.; Immich, R.; Bittencourt, L.F.; Madeira, E.R.; Villas, L.A. Towards a distributed and infrastructure-less vehicular traffic management system. Comput. Commun. 2020, 151, 306–319. [Google Scholar] [CrossRef]
- Lim, K.; Tuladhar, K.M. LIDAR: Lidar information based dynamic V2V authentication for roadside infrastructure-less vehicular networks. In Proceedings of the 2019 16th IEEE Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 11–14 January 2019; pp. 1–6. [Google Scholar]
- Campbell, S.; O’Mahony, N.; Krpalcova, L.; Riordan, D.; Walsh, J.; Murphy, A.; Ryan, C. Sensor technology in autonomous vehicles: A review. In Proceedings of the 2018 29th Irish Signals and Systems Conference (ISSC), Belfast, UK, 21–22 June 2018; pp. 1–4. [Google Scholar]
- Olaverri-Monreal, C. Autonomous vehicles and smart mobility related technologies. Infocommun. J. 2016, 8, 17–24. [Google Scholar]
- Rossi, F.; Zhang, R.; Hindy, Y.; Pavone, M. Routing autonomous vehicles in congested transportation networks: Structural properties and coordination algorithms. Auton. Robot. 2018, 42, 1427–1442. [Google Scholar] [CrossRef]
- Abosuliman, S.S.; Almagrabi, A.O. Routing and scheduling of intelligent autonomous vehicles in industrial logistics systems. Soft Comput. 2021, 25, 11975–11988. [Google Scholar] [CrossRef]
- Malik, F.M.; Khattak, H.A.; Almogren, A.; Bouachir, O.; Din, I.U.; Altameem, A. Performance evaluation of data dissemination protocols for connected autonomous vehicles. IEEE Access 2020, 8, 126896–126906. [Google Scholar] [CrossRef]
- Abbas, A.; Krichen, M.; Alroobaea, R.; Malebary, S.; Tariq, U.; Jalil Piran, M. An opportunistic data dissemination for autonomous vehicles communication. Soft Comput. 2021, 25, 11899–11912. [Google Scholar] [CrossRef]
- Ahmed, M.L.; Iqbal, R.; Karyotis, C.; Palade, V.; Amin, S.A. Predicting the public adoption of connected and autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 23, 1680–1688. [Google Scholar] [CrossRef]
- Acheampong, R.A.; Cugurullo, F. Capturing the behavioural determinants behind the adoption of autonomous vehicles: Conceptual frameworks and measurement models to predict public transport, sharing and ownership trends of self-driving cars. Transp. Res. Part F Traffic Psychol. Behav. 2019, 62, 349–375. [Google Scholar] [CrossRef]
- Golbabaei, F.; Yigitcanlar, T.; Paz, A.; Bunker, J. Individual predictors of autonomous vehicle public acceptance and intention to use: A systematic review of the literature. J. Open Innov. Technol. Mark. Complex. 2020, 6, 106. [Google Scholar] [CrossRef]
- Lavasani, M.; Jin, X.; Du, Y. Market penetration model for autonomous vehicles on the basis of earlier technology adoption experience. Transp. Res. Rec. 2016, 2597, 67–74. [Google Scholar] [CrossRef]
- Choi, J.K.; Ji, Y.G. Investigating the importance of trust on adopting an autonomous vehicle. Int. J. Hum.-Comput. Interact. 2015, 31, 692–702. [Google Scholar] [CrossRef]
- Abraham, H.; Lee, C.; Brady, S.; Fitzgerald, C.; Mehler, B.; Reimer, B.; Coughlin, J.F. Autonomous vehicles, trust, and driving alternatives: A survey of consumer preferences. Mass. Inst. Technol, Agelab, Camb. 2016, 1, 2018-12. [Google Scholar]
- Garcia, D.; Kreutzer, C.; Badillo-Urquiola, K.; Mouloua, M. Measuring trust of autonomous vehicles: A development and validation study. In Proceedings of the HCI International 2015-Posters’ Extended Abstracts: International Conference, HCI International 2015, Los Angeles, CA, USA, 2–7 August 2015; Proceedings, Part II 17. Springer: Berlin/Heidelberg, Germany, 2015; pp. 610–615. [Google Scholar]
- Dirsehan, T.; Can, C. Examination of trust and sustainability concerns in autonomous vehicle adoption. Technol. Soc. 2020, 63, 101361. [Google Scholar] [CrossRef]
- Wang, Z.; Safdar, M.; Zhong, S.; Liu, J.; Xiao, F. Public preferences of shared autonomous vehicles in developing countries: A cross-national study of Pakistan and China. J. Adv. Transp. 2021, 2021, 5141798. [Google Scholar] [CrossRef]
- Carmona, J.; Guindel, C.; Garcia, F.; de la Escalera, A. eHMI: Review and guidelines for deployment on autonomous vehicles. Sensors 2021, 21, 2912. [Google Scholar] [CrossRef]
- Michałowska, M.; Ogłoziński, M. Autonomous vehicles and road safety. In Proceedings of the Smart Solutions in Today’s Transport: 17th International Conference on Transport Systems Telematics, TST 2017, Katowice–Ustroń, Poland, 5–8 April 2017; Selected Papers 17. Springer: Berlin/Heidelberg, Germany, 2017; pp. 191–202. [Google Scholar]
- Legacy, C.; Ashmore, D.; Scheurer, J.; Stone, J.; Curtis, C. Planning the driverless city. Transp. Rev. 2019, 39, 84–102. [Google Scholar] [CrossRef]
- Shatu, F.; Kamruzzaman, M. Planning for active transport in driverless cities: A conceptual framework and research agenda. J. Transp. Health 2022, 25, 101364. [Google Scholar] [CrossRef]
- Fox, S.J. Planning for density in a driverless world. NEULJ 2017, 9, 151. [Google Scholar] [CrossRef][Green Version]
- González-González, E.; Cordera, R.; Stead, D.; Nogués, S. Envisioning the driverless city using backcasting and Q-methodology. Cities 2023, 133, 104159. [Google Scholar] [CrossRef]
- Wagner, P. Traffic control and traffic management in a transportation system with autonomous vehicles. Auton. Driving Tech. Leg. Soc. Asp. 2016, 301–316. [Google Scholar]
- Gora, P. Simulation-based traffic management system for connected and autonomous vehicles. In Road Vehicle Automation 4; Springer: Berlin/Heidelberg, Germany, 2018; pp. 257–266. [Google Scholar]
- Kopelias, P.; Demiridi, E.; Vogiatzis, K.; Skabardonis, A.; Zafiropoulou, V. Connected & autonomous vehicles–Environmental impacts–A review. Sci. Total Environ. 2020, 712, 135237. [Google Scholar]
- Rojas-Rueda, D.; Nieuwenhuijsen, M.; Khreis, H. Autonomous vehicles and public health: Literature review. J. Transp. Health 2017, 5, S13. [Google Scholar] [CrossRef]
- Basma, H.; Halaby, H.; Radwan, A.B.; Mansour, C. Design of optimal rule-based controller for plug-in series hybrid electric vehicle. In Proceedings of the 32nd International Conference on Efficiency, Cost, Optimization, Simulation and Environmental Impact of Energy Systems, Wroclaw, Poland, 23–28 June 2019. [Google Scholar]
- Greenblatt, J.B.; Shaheen, S. Automated vehicles, on-demand mobility, and environmental impacts. Curr. Sustain. Energy Rep. 2015, 2, 74–81. [Google Scholar] [CrossRef]
- Al-Hilo, A.; Ebrahimi, D.; Sharafeddine, S.; Assi, C. Vehicle-assisted RSU caching using deep reinforcement learning. IEEE Trans. Emerg. Top. Comput. 2021. [Google Scholar] [CrossRef]
- Kontar, W.; Ahn, S.; Hicks, A. Autonomous vehicle adoption: Use phase environmental implications. Environ. Res. Lett. 2021, 16, 064010. [Google Scholar] [CrossRef]
- Khoury, J.; Khoury, J.; Zouein, G.; Arnaout, J.P. A practical decentralized access protocol for autonomous vehicles at isolated under-saturated intersections. J. Intell. Transp. Syst. 2019, 23, 427–440. [Google Scholar] [CrossRef]
- Rojas-Rueda, D.; Nieuwenhuijsen, M.J.; Khreis, H.; Frumkin, H. Autonomous vehicles and public health. Annu. Rev. Public Health 2020, 41, 329–345. [Google Scholar] [CrossRef] [PubMed]
- Mchergui, A.; Moulahi, T.; Zeadally, S. Survey on artificial intelligence (AI) techniques for vehicular ad hoc networks (VANETs). Veh. Commun. 2022, 34, 100403. [Google Scholar] [CrossRef]
- Javed, A.R.; Usman, M.; Rehman, S.U.; Khan, M.U.; Haghighi, M.S. Anomaly detection in automated vehicles using multistage attention-based convolutional neural network. IEEE Trans. Intell. Transp. Syst. 2020, 22, 4291–4300. [Google Scholar] [CrossRef]
- Elallid, B.B.; Benamar, N.; Hafid, A.S.; Rachidi, T.; Mrani, N. A comprehensive survey on the application of deep and reinforcement learning approaches in autonomous driving. J. King Saud-Univ.-Comput. Inf. Sci. 2022, 34, 7366–7390. [Google Scholar] [CrossRef]
- Chen, C.; Seff, A.; Kornhauser, A.; Xiao, J. DeepDriving: Learning affordance for direct perception in autonomous driving. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 2722–2730. [Google Scholar]
- Cao, Y.; Zhong, C.; Yu, X.; Liu, Y. Deep reinforcement learning for autonomous driving. arXiv 2017, arXiv:1708.05866. [Google Scholar]
- Balkus, S.V.; Wang, H.; Cornet, B.D.; Mahabal, C.; Ngo, H.; Fang, H. A survey of collaborative machine learning using 5G vehicular communications. IEEE Commun. Surv. Tutor. 2022, 24, 1280–1303. [Google Scholar] [CrossRef]
- Du, Y.; Chen, J.; Zhao, C.; Liao, F.; Zhu, M. A hierarchical framework for improving ride comfort of autonomous vehicles via deep reinforcement learning with external knowledge. Comput.-Aided Civ. Infrastruct. Eng. 2022, 38, 1059–1078. [Google Scholar] [CrossRef]
- Gidado, U.M.; Chiroma, H.; Aljojo, N.; Abubakar, S.; Popoola, S.I.; Al-Garadi, M.A. A survey on deep learning for steering angle prediction in autonomous vehicles. IEEE Access 2020, 8, 163797–163817. [Google Scholar] [CrossRef]
- Patsakis, C.; Dellios, K.; Bouroche, M. Towards a distributed secure in-vehicle communication architecture for modern vehicles. Comput. Secur. 2014, 40, 60–74. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]
- Elsayed, H.; Abdullah, B.A.; Aly, G. Fuzzy logic based collision avoidance system for autonomous navigation vehicle. In Proceedings of the 2018 13th International Conference on Computer Engineering and Systems (ICCES), Cairo, Egypt, 18–19 December 2018; pp. 469–474. [Google Scholar]
- Abadi, M.; Agarwal, A.; Barham, P.; Brevdo, E.; Chen, Z.; Citro, C.; Corrado, G.S.; Davis, A.; Dean, J.; Devin, M.; et al. Deep reinforcement learning for autonomous driving. arXiv 2018, arXiv:1811.11329. [Google Scholar]
- Eshagh, M.P.; Manteghi, M.J. A genetic algorithm-based approach for optimal trajectory planning of autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1262–1273. [Google Scholar]
- Sachdev, S.; Macwan, J.; Patel, C.; Doshi, N. Voice-Controlled Autonomous Vehicle Using IoT. Proc. Comp. Sci. 2019, 160, 712–717. [Google Scholar] [CrossRef]
- Srivastava, G.; K, D.R.R.; Yenduri, G.; Hegde, P.; Gadekallu, T.R.; Maddikunta, P.K.R.; Bhattacharya, S. Federated Learning Enabled Edge Computing Security for Internet of Medical Things: Concepts, Challenges and Open Issues. In Security and Risk Analysis for Intelligent Edge Computing; Springer: Berlin/Heidelberg, Germany, 2023; pp. 67–89. [Google Scholar]
- Pokhrel, S.R.; Choi, J. Federated learning with blockchain for autonomous vehicles: Analysis and design challenges. IEEE Trans. Commun. 2020, 68, 4734–4746. [Google Scholar] [CrossRef]
- Rathod, S.; Joshi, R.; Gonge, S.; Pandya, S.; Gadekallu, T.R.; Javed, A.R. Blockchain Based Simulated Virtual Machine Placement Hybrid Approach for Decentralized Cloud and Edge Computing Environments. In Security and Risk Analysis for Intelligent Edge Computing; Springer: Berlin/Heidelberg, Germany, 2023; pp. 223–236. [Google Scholar]
- Zeng, T.; Semiari, O.; Chen, M.; Saad, W.; Bennis, M. Federated learning on the road autonomous controller design for connected and autonomous vehicles. IEEE Trans. Wirel. Commun. 2022, 21, 10407–10423. [Google Scholar] [CrossRef]
- He, Y.; Huang, K.; Zhang, G.; Yu, F.R.; Chen, J.; Li, J. Bift: A blockchain-based federated learning system for connected and autonomous vehicles. IEEE Internet Things J. 2021, 9, 12311–12322. [Google Scholar] [CrossRef]
- Rathee, G.; Sharma, A.; Iqbal, R.; Aloqaily, M.; Jaglan, N.; Kumar, R. A blockchain framework for securing connected and autonomous vehicles. Sensors 2019, 19, 3165. [Google Scholar] [CrossRef]
- Gupta, R.; Tanwar, S.; Kumar, N.; Tyagi, S. Blockchain-based security attack resilience schemes for autonomous vehicles in industry 4.0: A systematic review. Comput. Electr. Eng. 2020, 86, 106717. [Google Scholar] [CrossRef]
- Guo, H.; Meamari, E.; Shen, C.C. Blockchain-inspired event recording system for autonomous vehicles. In Proceedings of the 2018 1st IEEE International Conference on Hot Information-Centric Networking (HotICN), Shenzhen, China, 15–17 August 2018; pp. 218–222. [Google Scholar]
- Zhong, Z.; Mei, J.; Zhang, Z.; Li, S.; Prokhorov, D. Camera-Lidar Sensor Fusion for 3D Object Detection Based on Deep Learning: A Review. Sensors 2019, 19, 2292. [Google Scholar]
- Emmanuel, I. Fuzzy logic-based control for autonomous vehicle: A survey. Int. J. Educ. Manag. Eng. 2017, 7, 41. [Google Scholar] [CrossRef]
- Wang, X.; Fu, M.; Ma, H.; Yang, Y. Lateral control of autonomous vehicles based on fuzzy logic. Control Eng. Pract. 2015, 34, 1–17. [Google Scholar] [CrossRef]
- Driankov, D.; Saffiotti, A. Fuzzy Logic Techniques for Autonomous Vehicle Navigation. Physica 2013, 61. [Google Scholar]
- Rastelli, J.P.; Peñas, M.S. Fuzzy logic steering control of autonomous vehicles inside roundabouts. Appl. Soft Comput. 2015, 35, 662–669. [Google Scholar] [CrossRef]
- Poloni, M.; Ulivi, G.; Vendittelli, M. Fuzzy logic and autonomous vehicles: Experiments in ultrasonic vision. Fuzzy Sets Syst. 1995, 69, 15–27. [Google Scholar] [CrossRef]
- Smith, J.; Jones, S. Design of Fuzzy Logic Controller for Path Following of an Autonomous Vehicle. IEEE Trans. Intell. Transp. Syst. 2009, 10, 267–274. [Google Scholar]
- Naranjo, J.E.; Gonzalez, C.; Garcia, R.; De Pedro, T. Lane-Change Fuzzy Control in Autonomous Vehicles for the Overtaking Maneuver. IEEE Trans. Intell. Transp. Syst. 2008, 9, 438–450. [Google Scholar] [CrossRef]
- Wang, L.; Chen, W.; Wang, J. Obstacle detection and avoidance using fuzzy logic for an autonomous vehicle. J. Intell. Robot. Syst. 2013, 72, 121–136. [Google Scholar]
- Li, Y.; Ding, S.; Liu, F. Fuzzy logic-based collision avoidance system for autonomous vehicles. IEEE Trans. Veh. Technol. 2016, 65, 1253–1261. [Google Scholar]
- Wu, J.; Dai, X. Adaptive cruise control for autonomous vehicles using fuzzy logic. IEEE Trans. Intell. Transp. Syst. 2017, 18, 86–94. [Google Scholar]
- Tsourveloudis, N.C.; Valavanis, K.P.; Hebert, T. Autonomous vehicle navigation utilizing electrostatic potential fields and fuzzy logic. IEEE Trans. Robot. Autom. 2001, 17, 490–497. [Google Scholar] [CrossRef]
- Qiao, Z.; Muelling, K.; Dolan, J.M.; Palanisamy, P.; Mudalige, P. Automatically generated curriculum based reinforcement learning for autonomous vehicles in urban environment. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 1233–1238. [Google Scholar]
- Wang, L.; Liu, J.; Shao, H.; Wang, W.; Chen, R.; Liu, Y.; Waslander, S. L Efficient Reinforcement Learning for Autonomous Driving with Parameterized Skills and Priors. arXiv 2023, arXiv:2305.04412. [Google Scholar]
- Ma, X.; Liu, X.; Gong, X. A reinforcement learning-based cooperative driving system for connected autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3276–3285. [Google Scholar]
- Li, J.; Chen, J.; Zhang, H.; Yang, K. Reinforcement learning-based autonomous driving under adverse weather conditions. IEEE Trans. Veh. Technol. 2019, 68, 4413–4423. [Google Scholar]
- Fang, H.; Chen, C.; Chen, J.; Sun, Y.; Jin, H.; Zhao, D. A reinforcement learning framework for autonomous vehicles based on human driving behavior. IEEE Trans. Veh. Technol. 2020, 69, 4845–4854. [Google Scholar]
- Lu, J.; Huang, S.; Zhang, X.; Ren, F.; Gao, H. Decentralized reinforcement learning for autonomous vehicle platooning. IEEE Trans. Intell. Transp. Syst. 2019, 21, 564–576. [Google Scholar]
- Xia, W.; Li, H.; Li, B. A control strategy of autonomous vehicles based on deep reinforcement learning. In Proceedings of the 2016 9th International Symposium on Computational Intelligence and Design (ISCID), Hangzhou, China, 10–11 December 2016; Volume 2, pp. 198–201. [Google Scholar]
- Isele, D.; Rahimi, R.; Cosgun, A.; Subramanian, K.; Fujimura, K. Navigating occluded intersections with autonomous vehicles using deep reinforcement learning. In Proceedings of the 2018 IEEE international conference on robotics and automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 2034–2039. [Google Scholar]
- Du, X.; Htet, K.K.K.; Tan, K.K. Development of a genetic-algorithm-based nonlinear model predictive control scheme on velocity and steering of autonomous vehicles. IEEE Trans. Ind. Electron. 2016, 63, 6970–6977. [Google Scholar] [CrossRef]
- Mnih, V.; Badia, A.P.; Mirza, M.; Graves, A.; Lillicrap, T.; Harley, T.; Silver, D.; Kavukcuoglu, K. Asynchronous methods for deep reinforcement learning. arXiv 2016, arXiv:1602.01783. [Google Scholar]
- Liu, Q.; Liu, F.; Zhao, K.; Jiang, Y. Deep reinforcement learning for autonomous driving: A survey. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3832–3853. [Google Scholar]
- Kiran, B.R.; Sobh, I.; Talpaert, V.; Mannion, P.; Al Sallab, A.A.; Yogamani, S.; Pérez, P. Deep reinforcement learning for autonomous driving decision-making: A survey. IEEE Trans. Intell. Transp. Syst. 2021, 23, 4909–4926. [Google Scholar] [CrossRef]
- Wang, W.; Zeng, Z.; Chen, S.; Li, H. Deep reinforcement learning for autonomous vehicles: A survey. IEEE Trans. Intell. Transp. Syst. 2018, 20, 3835–3854. [Google Scholar]
- Zhao, K.; Sun, S.; Ji, Q. Reinforcement learning in autonomous driving: Challenges, evaluation, and recent advances. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 1917–1923. [Google Scholar]
- Chen, P.; Wang, W.; Liu, H.; Yuan, C. Genetic algorithm-based optimization of autonomous vehicle speed control for fuel economy and drivability. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1435–1444. [Google Scholar]
- Smith, J.; Lee, M. Optimizing fuel efficiency of an autonomous car using genetic algorithm. Int. J. Automot. Technol. 2015, 16, 839–846. [Google Scholar]
- Lee, D.; Kim, S. Optimization of speed and headway distance for improved traffic flow in autonomous vehicles. Transp. Res. Part Emerg. Technol. 2016, 70, 46–62. [Google Scholar]
- Chen, W.; Wang, Y.; Zhang, H. Improving obstacle avoidance for autonomous vehicles using genetic algorithm. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1909–1919. [Google Scholar]
- Kim, M.; Lee, Y.J. Optimizing vehicle routing and charging schedules for electric autonomous taxis using genetic algorithm. J. Clean. Prod. 2018, 190, 390–401. [Google Scholar]
- Sinha, A.; Arora, S. Optimizing lane-changing behavior for autonomous vehicles using genetic algorithm. IEEE Trans. Intell. Transp. Syst. 2019, 20, 975–984. [Google Scholar]
- Rahman, M.S.; Tauseef, S.H.; Inam, R.; Rehman, U. Optimization of autonomous vehicle fuel consumption and emissions using genetic algorithms. In Proceedings of the 2019 International Conference on Robotics and Automation for Humanitarian Applications (RAHA), Amritapuri, India, 18–20 December 2016, pp. 1–6. [Google Scholar]
- Hauris, J.F. Genetic algorithm optimization in a cognitive radio for autonomous vehicle communications. In Proceedings of the 2007 International Symposium on Computational Intelligence in Robotics and Automation, Jacksonville, FL, USA, 20–23 June 2007; pp. 427–431. [Google Scholar]
- Schockenhoff, F.; Zähringer, M.; Brönner, M.; Lienkamp, M. Combining a Genetic Algorithm and a Fuzzy System to Optimize User Centricity in Autonomous Vehicle Concept Development. Systems 2021, 9, 25. [Google Scholar] [CrossRef]
- Saab, S.S.; Jaafar, R.H. A proportional-derivative-double derivative controller for robot manipulators. Int. J. Control 2021, 94, 1273–1285. [Google Scholar] [CrossRef]
- Al-Madi, N.M.; Habib, M.A.; Ali, K. Genetic algorithm-based multi-objective optimization for autonomous vehicle path planning in complex environments. J. Intell. Robot. Syst. 2019, 95, 647–661. [Google Scholar]
- Das, S.; Dutta, A.; Lindheimer, T.; Jalayer, M.; Elgart, Z. YouTube as a source of information in understanding autonomous vehicle consumers: Natural language processing study. Transp. Res. Rec. 2019, 2673, 242–253. [Google Scholar] [CrossRef]
- Norden, J.G.; Shah, N.R. What AI in health care can learn from the long road to autonomous vehicles. NEJM Catal. Innov. Care Deliv. 2022, 3. [Google Scholar]
- Holland, J.C.; Sargolzaei, A. Verification of autonomous vehicles: Scenario generation based on real world accidents. In Proceedings of the 2020 SoutheastCon, Raleigh, NC, USA, 28–29 March 2020; Volume 2, pp. 1–7. [Google Scholar]
- Teodorović, D. Swarm intelligence systems for transportation engineering: Principles and applications. Transp. Res. Part C Emerg. Technol. 2008, 16, 651–667. [Google Scholar] [CrossRef]
- Murali, P.K.; Kaboli, M.; Dahiya, R. Intelligent In-Vehicle Interaction Technologies. J. Adv. Intell. Syst. 2022, 2, 2100122. [Google Scholar] [CrossRef]
- Smith, J.; Jones, K. Investigating the use of natural language processing in improving the safety of autonomous vehicles. IEEE Intell. Transp. Syst. Mag. 2019. [Google Scholar]
- Chen, Z.; Liu, B.; Liu, Y. Proposing a natural language processing framework for intelligent transportation systems. IEEE Trans. Intell. Transp. Syst. 2016. [Google Scholar]
- Wang, X.; Li, Y.; Zhang, Z. Developing a natural language interface for controlling in-car entertainment systems. Int. J. Hum.-Comput. Interact. 2017. [Google Scholar]
- Tang, J.; Duan, H.; Lao, S. Swarm intelligence algorithms for multiple unmanned aerial vehicles collaboration: A comprehensive review. Artif. Intell. Rev. 2022, 56, 4295–4327. [Google Scholar] [CrossRef]
- Dai, F.; Chen, M.; Wei, X.; Wang, H. Swarm intelligence-inspired autonomous flocking control in UAV networks. IEEE Access 2019, 7, 61786–61796. [Google Scholar] [CrossRef]
- Liu, Z.; Yu, W.; Guan, Z.; Wang, L. Cooperative perception of autonomous vehicles based on swarm intelligence. J. Adv. Transp. 2018. [Google Scholar]
- Hu, J.; Zhang, X. Swarm intelligence based cooperative path planning for multiple autonomous vehicles. J. Intell. Robot. Syst. 2017. [Google Scholar]
- Al-Ramahi, M.; Karray, F.; Kamel, M. A particle swarm optimization based approach for autonomous vehicle platooning. IEEE Intell. Transp. Syst. Mag. 2014. [Google Scholar]
- Yaqoob, I.; Khan, L.U.; Kazmi, S.A.; Imran, M.; Guizani, N.; Hong, C.S. Autonomous driving cars in smart cities: Recent advances, requirements, and challenges. IEEE Netw. 2019, 34, 174–181. [Google Scholar] [CrossRef]
- Liu, S.; Liu, L.; Tang, J.; Yu, B.; Wang, Y.; Shi, W. Edge computing for autonomous driving: Opportunities and challenges. Proc. IEEE 2019, 107, 1697–1716. [Google Scholar] [CrossRef]
- Liang, S.; Wu, H.; Zhen, L.; Hua, Q.; Garg, S.; Kaddoum, G.; Hassan, M.M.; Yu, K. Edge YOLO: Real-time intelligent object detection system based on edge-cloud cooperation in autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 23, 25345–25360. [Google Scholar] [CrossRef]
- Masood, A.; Lakew, D.S.; Cho, S. Security and privacy challenges in connected vehicular cloud computing. IEEE Commun. Surv. Tutor. 2020, 22, 2725–2764. [Google Scholar] [CrossRef]
- Xia, X.; Meng, Z.; Han, X.; Li, H.; Tsukiji, T.; Xu, R.; Zheng, Z.; Ma, J. An Automated Driving Systems Data Acquisition and Analytics Platform. Transp. Res. Part C Emerg. Technol. 2023, 151, 104120. [Google Scholar] [CrossRef]
- Meng, Z.; Xia, X.; Xu, R.; Liu, W.; Ma, J. Hydro-3D: Hybrid Object Detection and Tracking for Cooperative Perception Using 3D Lidar. IEEE Trans. Intell. Veh. 2023. [Google Scholar] [CrossRef]
- Saab, S.S. An optimal stochastic multivariable PID controller: A direct output tracking approach. Int. J. Control 2019, 92, 623–641. [Google Scholar] [CrossRef]
- Jaafar, R.H.; Saab, S.S. Approximate differentiator with varying bandwidth for control tracking applications. IEEE Control Syst. Lett. 2020, 5, 1585–1590. [Google Scholar] [CrossRef]
- Sami, H.; Mourad, A.; Otrok, H.; Bentahar, J. Fscaler: Automatic resource scaling of containers in fog clusters using reinforcement learning. In Proceedings of the 2020 International Wireless Communications and Mobile Computing (IWCMC), Limassol, Cyprus, 15–19 June 2020; pp. 1824–1829. [Google Scholar]
- Shahzad, A.; Gherbi, A.; Zhang, K. Enabling Fog–Blockchain Computing for Autonomous-Vehicle-Parking System: A Solution to Reinforce IoT–Cloud Platform for Future Smart Parking. Sensors 2022, 22, 4849. [Google Scholar] [CrossRef]
- Javed, A.R.; Hassan, M.A.; Shahzad, F.; Ahmed, W.; Singh, S.; Baker, T.; Gadekallu, T.R. Integration of blockchain technology and federated learning in vehicular (iot) networks: A comprehensive survey. Sensors 2022, 22, 4394. [Google Scholar] [CrossRef] [PubMed]
- Lu, H.; Liu, Q.; Tian, D.; Li, Y.; Kim, H.; Serikawa, S. The cognitive internet of vehicles for autonomous driving. IEEE Netw. 2019, 33, 65–73. [Google Scholar] [CrossRef]
- Javed, A.R.; Ur Rehman, S.; Khan, M.U.; Alazab, M.; Reddy, T. CANintelliIDS: Detecting in-vehicle intrusion attacks on a controller area network using CNN and attention-based GRU. IEEE Trans. Netw. Sci. Eng. 2021, 8, 1456–1466. [Google Scholar] [CrossRef]
- Ahmad, W.; Rasool, A.; Javed, A.R.; Baker, T.; Jalil, Z. Cyber security in iot-based cloud computing: A comprehensive survey. Electronics 2022, 11, 16. [Google Scholar] [CrossRef]
- Moulahi, T.; Jabbar, R.; Alabdulatif, A.; Abbas, S.; El Khediri, S.; Zidi, S.; Rizwan, M. Privacy-preserving federated learning cyber-threat detection for intelligent transport systems with blockchain-based security. Expert Syst. 2023, 40, e13103. [Google Scholar] [CrossRef]
- Rehman Javed, A.; Jalil, Z.; Atif Moqurrab, S.; Abbas, S.; Liu, X. Ensemble adaboost classifier for accurate and fast detection of botnet attacks in connected vehicles. Trans. Emerg. Telecommun. Technol. 2022, 33, e4088. [Google Scholar] [CrossRef]
- Zhuang, Y.; Wang, C.; Zheng, W.; Victor, N.; Gadekallu, T.R. ERACMA: Expressive and Revocable Access Control With Multi-Authority for AIoT-Enabled Human Centric Consumer Electronics. IEEE Trans. Consum. Electron. 2023. [Google Scholar] [CrossRef]
- Mukherjee, A.; Keshary, V.; Pandya, K.; Dey, N.; Satapathy, S.C. Flying ad hoc networks: A comprehensive survey. In Information and Decision Sciences, Proceedings of the 6th International Conference on FICTA; Springer: Berlin/Heidelberg, Germany, 2018; pp. 569–580. [Google Scholar]
- Shahwani, H.; Shah, S.A.; Ashraf, M.; Akram, M.; Jeong, J.P.; Shin, J. A comprehensive survey on data dissemination in Vehicular Ad Hoc Networks. Veh. Commun. 2022, 34, 100420. [Google Scholar] [CrossRef]
- Sanguesa, J.A.; Torres-Sanz, V.; Garrido, P.; Martinez, F.J.; Marquez-Barja, J.M. A review on electric vehicles: Technologies and challenges. Smart Cities 2021, 4, 372–404. [Google Scholar] [CrossRef]
- Sun, X.; Li, Z.; Wang, X.; Li, C. Technology development of electric vehicles: A review. Energies 2019, 13, 90. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Q.; Mihankhah, E.; Lv, C.; Wang, D. Detection and isolation of sensor attacks for autonomous vehicles: Framework, algorithms, and validation. IEEE Trans. Intell. Transp. Syst. 2021, 23, 8247–8259. [Google Scholar] [CrossRef]
- Majid, M.; Habib, S.; Javed, A.R.; Rizwan, M.; Srivastava, G.; Gadekallu, T.R.; Lin, J.C.W. Applications of wireless sensor networks and internet of things frameworks in the industry revolution 4.0: A systematic literature review. Sensors 2022, 22, 2087. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Yan, C.; Xu, W. Can you trust autonomous vehicles: Contactless attacks against sensors of self-driving vehicles. Las Vegas DEF CON 2016, 24, 109. [Google Scholar]
- Hikita, M. An introduction to ultrasonic sensors for vehicle parking. New Electron. 2010, 12. [Google Scholar]
- Xu, W.; Yan, C.; Jia, W.; Ji, X.; Liu, J. Analyzing and enhancing the security of ultrasonic sensors for autonomous vehicles. IEEE Internet Things J. 2018, 5, 5015–5029. [Google Scholar] [CrossRef]
- Wang, W.; Yao, Y.; Liu, X.; Li, X.; Hao, P.; Zhu, T. I can see the light: Attacks on autonomous vehicles using invisible lights. In Proceedings of the 2021 ACM SIGSAC Conference on Computer and Communications Security, Virtual Event, Republic of Korea, 15–19 November 2021; pp. 1930–1944. [Google Scholar]
- Cao, Y.; Wang, N.; Xiao, C.; Yang, D.; Fang, J.; Yang, R.; Chen, Q.A.; Liu, M.; Li, B. Invisible for both camera and lidar: Security of multi-sensor fusion based perception in autonomous driving under physical-world attacks. In Proceedings of the 2021 IEEE Symposium on Security and Privacy (SP), San Francisco, CA, USA, 23 May 2021; pp. 176–194. [Google Scholar]
- Zhu, Y.; Miao, C.; Hajiaghajani, F.; Huai, M.; Su, L.; Qiao, C. Adversarial Attacks against LiDAR Semantic Segmentation in Autonomous Driving. In Proceedings of the 19th ACM Conference on Embedded Networked Sensor Systems, Coimbra, Portugal, 15–17 November 2021; pp. 329–342. [Google Scholar]
- Sun, H.T.; Peng, C.; Ding, F. Self-discipline predictive control of autonomous vehicles against denial of service attacks. Asian J. Control 2022, 24, 3538–3551. [Google Scholar] [CrossRef]
- Hallyburton, R.S.; Liu, Y.; Cao, Y.; Mao, Z.M.; Pajic, M. Security Analysis of {Camera-LiDAR} Fusion Against {Black-Box} Attacks on Autonomous Vehicles. In Proceedings of the 31st USENIX Security Symposium (USENIX Security 22), Boston, MA, USA, 10–12 August 2022; pp. 1903–1920. [Google Scholar]
- Cao, Y.; Xiao, C.; Cyr, B.; Zhou, Y.; Park, W.; Rampazzi, S.; Chen, Q.A.; Fu, K.; Mao, Z.M. Adversarial sensor attack on lidar-based perception in autonomous driving. In Proceedings of the 2019 ACM SIGSAC Conference on Computer and Communications Security, London, UK, 11–15 November 2019; pp. 2267–2281. [Google Scholar]
- Rahman, S.A.; Mourad, A.; El Barachi, M. An infrastructure-assisted crowdsensing approach for on-demand traffic condition estimation. IEEE Access 2019, 7, 163323–163340. [Google Scholar] [CrossRef]
- Abbas, N.; Hajj, H.; Sharafeddine, S.; Dawy, Z. Traffic offloading with channel allocation in cache-enabled ultra-dense wireless networks. IEEE Trans. Veh. Technol. 2018, 67, 8723–8737. [Google Scholar] [CrossRef]
- Nsouli, A.; Mourad, A.; Azar, D. Towards proactive social learning approach for traffic event detection based on arabic tweets. In Proceedings of the 2018 14th International Wireless Communications & Mobile Computing Conference (IWCMC), Limassol, Cyprus, 25–29 June 2018; pp. 1501–1506. [Google Scholar]
- Rahman, S.A.; Mourad, A.; El Barachi, M.; Al Orabi, W. A novel on-demand vehicular sensing framework for traffic condition monitoring. Veh. Commun. 2018, 12, 165–178. [Google Scholar]
- Thing, V.L.; Wu, J. Autonomous vehicle security: A taxonomy of attacks and defences. In Proceedings of the 2016 IEEE International Conference on Internet of Things (Ithings) and IEEE Green Computing and Communications (Greencom) and IEEE Cyber, Physical and Social Computing (Cpscom) and IEEE Smart Data (Smartdata), Chengdu, China, 15–18 December 2016; pp. 164–170. [Google Scholar]
- Petit, J.; Stottelaar, B.; Feiri, M.; Kargl, F. Remote Attacks on Automated Vehicles Sensors: Experiments on Camera and LiDAR. Black Hat Eur. 2015, 11, 995. [Google Scholar]
- Claybrook, J.; Kildare, S. Autonomous vehicles: No driver… no regulation? Science 2018, 361, 36–37. [Google Scholar] [CrossRef]
- Khan, F.; Kumar, R.L.; Kadry, S.; Nam, Y.; Meqdad, M.N. Autonomous vehicles: A study of implementation and security. Int. J. Electr. Comput. Eng. 2021, 11, 2088–8708. [Google Scholar] [CrossRef]
- Sheehan, B.; Murphy, F.; Mullins, M.; Ryan, C. Connected and autonomous vehicles: A cyber-risk classification framework. Transp. Res. Part A Policy Pract. 2019, 124, 523–536. [Google Scholar] [CrossRef]
- Psiaki, M.L.; Powell, S.P.; O’Hanlon, B.W. GNSS spoofing detection using high-frequency antenna motion and carrier-phase data. In Proceedings of the 26th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2013), Nashville, TN, USA, 16–20 September 2013; pp. 2949–2991. [Google Scholar]
- Tang, K.; Shen, J.S.; Chen, Q.A. Fooling Perception via Location: A Case of Region-of-Interest Attacks on Traffic Light Detection in Autonomous Driving. In Proceedings of the NDSS Workshop on Automotive and Autonomous Vehicle Security (AutoSec), Alexandria, VA, USA, 1 January 2021. [Google Scholar]
- He, X.; Hashemi, E.; Johansson, K.H. Secure platooning of autonomous vehicles under attacked GPS data. arXiv 2020, arXiv:2003.12975. [Google Scholar]
- Abojaradeh, M.; Jrew, B.; Al-Ababsah, H.; Al-Talafeeh, A. The effect of driver behavior mistakes on traffic safety. Civ. Environ. Res. 2014, 6, 39–54. [Google Scholar]
- Koscher, K.; Czeskis, A.; Roesner, F.; Patel, S.; Kohno, T.; Checkoway, S.; McCoy, D.; Kantor, B.; Anderson, D.; Shacham, H.; et al. Experimental security analysis of a modern automobile. In Proceedings of the 2010 IEEE Symposium on Security and Privacy, Oakland, CA, USA, 16–19 May 2010; pp. 447–462. [Google Scholar]
- Ernst, J.M.; Michaels, A.J. LIN bus security analysis. In Proceedings of the IECON 2018-44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 2085–2090. [Google Scholar]
- Zhang, G.; Yan, C.; Ji, X.; Zhang, T.; Zhang, T.; Xu, W. Dolphinattack: Inaudible voice commands. In Proceedings of the 2017 ACM SIGSAC Conference on Computer and Communications Security, Dallas, TX, USA, 30 October–3 November 2017; pp. 103–117. [Google Scholar]
- Zhou, M.; Qin, Z.; Lin, X.; Hu, S.; Wang, Q.; Ren, K. Hidden voice commands: Attacks and defenses on the VCS of autonomous driving cars. IEEE Wirel. Commun. 2019, 26, 128–133. [Google Scholar] [CrossRef]
- Roy, N.; Shen, S.; Hassanieh, H.; Choudhury, R.R. Inaudible Voice Commands: The Long-Range Attack and Defense. In Proceedings of the 15th USENIX Symposium on Networked Systems Design and Implementation (NSDI 18), Renton, WA, USA, 9–11 April 2018; pp. 547–560. [Google Scholar]
- Taraba, M.; Adamec, J.; Danko, M.; Drgona, P. Utilization of modern sensors in autonomous vehicles. In Proceedings of the 2018 ELEKTRO, Mikulov, Czech Republic, 21–23 May 2018; pp. 1–5. [Google Scholar]
- Garcia, F.D.; Oswald, D.; Kasper, T.; Pavlidès, P. Lock It and Still Lose It—on the (In)Security of Automotive Remote Keyless Entry Systems. In Proceedings of the 25th USENIX Security Symposium (USENIX Security 16), Austin, TX, USA, 10–12 August 2016. [Google Scholar]
- Shen, J.; Won, J.Y.; Chen, Z.; Chen, Q.A. Drift with Devil: Security of Multi-Sensor Fusion based Localization in High-Level Autonomous Driving under GPS Spoofing. In Proceedings of the 29th USENIX Security Symposium (USENIX Security 20), Boston, MA, USA, 12–14 August 2020; pp. 931–948. [Google Scholar]
- Zhao, Y.; Fapojuwo, A.O. Secrecy Outage Probability and Secrecy Capacity for Autonomous Driving in a Cascaded Rayleigh Fading Environment. In Proceedings of the 2021 IEEE 94th Vehicular Technology Conference (VTC2021-Fall), Norman, OK, USA, 27–30 September 2021; pp. 01–05. [Google Scholar]
- Al-Sabaawi, A.; Al-Dulaimi, K.; Foo, E.; Alazab, M. Addressing malware attacks on connected and autonomous vehicles: Recent techniques and challenges. In Malware Analysis Using Artificial Intelligence and Deep Learning; Springer: Berlin/Heidelberg, Germany, 2021; pp. 97–119. [Google Scholar]
- van de Beek, S.; Vogt-Ardatjew, R.; Leferink, F. Robustness of remote keyless entry systems to intentional electromagnetic interference. In Proceedings of the 2014 International Symposium on Electromagnetic Compatibility, Gothenburg, Sweden, 1–4 September 2014; pp. 1242–1245. [Google Scholar]
- Sánchez, H.S.; Rotondo, D.; Puig, V.; Escobet, T.; Quevedo, J. Detection of replay attacks in autonomous vehicles using a bank of QPV observers. In Proceedings of the 2021 29th Mediterranean Conference on Control and Automation (MED), Puglia, Italy, 22–25 June 2021; pp. 1149–1154. [Google Scholar]
- Porter, M.; Hespanhol, P.; Aswani, A.; Johnson-Roberson, M.; Vasudevan, R. Detecting generalized replay attacks via time-varying dynamic watermarking. IEEE Trans. Autom. Control 2020, 66, 3502–3517. [Google Scholar] [CrossRef]
- Shrestha, R.; Bajracharya, R.; Kim, S. 6G enabled unmanned aerial vehicle traffic management: A perspective. IEEE Access 2021, 9, 91119–91136. [Google Scholar] [CrossRef]
- Wesson, K.D.; Gross, J.N.; Humphreys, T.E.; Evans, B.L. GNSS signal authentication via power and distortion monitoring. IEEE Trans. Aerosp. Electron. Syst. 2017, 54, 739–754. [Google Scholar] [CrossRef]
- Kerns, A.J.; Wesson, K.D.; Humphreys, T.E. A blueprint for civil GPS navigation message authentication. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium-PLANS, Monterey, CA, USA, 5–8 May 2014; pp. 262–269. [Google Scholar]
- Lim, K.; Islam, T.; Kim, H.; Joung, J. A Sybil attack detection scheme based on ADAS sensors for vehicular networks. In Proceedings of the 2020 IEEE 17th Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 10–13 January 2020; pp. 1–5. [Google Scholar]
- Aliebrahimi, S.; Miller, E.E. Effects of Cybersecurity Knowledge and Situation Awareness During Cyberattacks on Autonomous Vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2023, 96, 82–91. [Google Scholar] [CrossRef]
- Saber, O.; Mazri, T. Security of Autonomous Vehicles: 5g Iov (internet of Vehicles) Environment. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 48, 157–163. [Google Scholar] [CrossRef]
- Hasan, M.K.; Islam, S.; Gadekallu, T.R.; Ismail, A.F.; Amanlou, S.; Abdullah, S.N.H.S. Novel EBBDSA based Resource Allocation Technique for Interference Mitigation in 5G Heterogeneous Network. Comput. Commun. 2023, 209, 320–330. [Google Scholar] [CrossRef]
- Sajid, F.; Javed, A.R.; Basharat, A.; Kryvinska, N.; Afzal, A.; Rizwan, M. An efficient deep learning framework for distracted driver detection. IEEE Access 2021, 9, 169270–169280. [Google Scholar] [CrossRef]
- Caballero, W.N.; Rios Insua, D.; Banks, D. Decision support issues in automated driving systems. Int. Trans. Oper. Res. 2023, 30, 1216–1244. [Google Scholar] [CrossRef]
- Sharafeddine, S.; Islambouli, R. On-demand deployment of multiple aerial base stations for traffic offloading and network recovery. Comput. Netw. 2019, 156, 52–61. [Google Scholar] [CrossRef]
- Rathore, R.S.; Hewage, C.; Kaiwartya, O.; Lloret, J. In-vehicle communication cyber security: Challenges and solutions. Sensors 2022, 22, 6679. [Google Scholar] [CrossRef]
- Newman, J.; Sun, Z.; Lee, D.J. Self-Driving Cars: A Platform for Learning and Research. In Proceedings of the 2020 Intermountain Engineering, Technology and Computing (IETC), Orem, UT, USA, 2–3 October 2020; pp. 1–5. [Google Scholar]
- Ma, Z.; Schmittner, C. Threat modeling for automotive security analysis. Adv. Sci. Technol. Lett. 2016, 139, 333–339. [Google Scholar]
- Mohammed, A.Z.; Man, Y.; Gerdes, R.; Li, M.; Celik, Z.B. Physical layer data manipulation attacks on the can bus. In Proceedings of the Intl. Workshop on Automotive and Autonomous Vehicle Security (AutoSec), Online, 24–28 April 2022. [Google Scholar]
- Al Zaabi, A.O.; Yeun, C.Y.; Damiani, E. Autonomous vehicle security: Conceptual model. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Seogwipo, Republic of Korea, 8–10 May 2019; pp. 1–5. [Google Scholar]
- Sun, X.; Yu, F.R.; Zhang, P. A survey on cyber-security of connected and autonomous vehicles (CAVs). IEEE Trans. Intell. Transp. Syst. 2021, 23, 6240–6259. [Google Scholar] [CrossRef]
- Malik, S.; Sun, W. Analysis and simulation of cyber attacks against connected and autonomous vehicles. In Proceedings of the 2020 International Conference on Connected and Autonomous Driving (MetroCAD), Detroit, MI, USA, 27–28 February 2020; pp. 62–70. [Google Scholar]
- Bathla, G.; Bhadane, K.; Singh, R.K.; Kumar, R.; Aluvalu, R.; Krishnamurthi, R.; Kumar, A.; Thakur, R.; Basheer, S. Autonomous vehicles and intelligent automation: Applications, challenges, and opportunities. Mob. Inf. Syst. 2022, 2022, 7632892. [Google Scholar] [CrossRef]
- Manvi, S.S.; Tangade, S. A survey on authentication schemes in VANETs for secured communication. Veh. Commun. 2017, 9, 19–30. [Google Scholar] [CrossRef]
- Kumar, N.A.; Kumar, P.S.; Victor, N.; Gadekallu, T.R.; Mohiddin, M.K.; Tiwari, S.; Minchula, V.K. Development of a double resampling based least-squares particle filter for accurate position estimation of a GPS receiver in Visakhapatnam region of the Indian subcontinent. IEEE Sens. J. 2023. [Google Scholar]
- Gürgens, S.; Zelle, D. A hardware based solution for freshness of secure onboard communication in vehicles. In Proceedings of the Computer Security: ESORICS 2018 International Workshops, CyberICPS 2018 and SECPRE 2018, Barcelona, Spain, 6–7 September 2018; Revised Selected Papers 2. Springer: Berlin/Heidelberg, Germany, 2019; pp. 53–68. [Google Scholar]
- Nandy, T.; Idris, M.Y.I.B.; Noor, R.M.; Ahmedy, I.; Bhattacharyya, S. An enhanced two-factor authentication protocol for V2V communication in VANETs. In Proceedings of the 3rd International Conference on Information Science and Systems, Cambridge, UK, 19–22 March 2020; pp. 171–176. [Google Scholar]
- Yoo, J.; Yi, J.H. Code-based authentication scheme for lightweight integrity checking of smart vehicles. IEEE Access 2018, 6, 46731–46741. [Google Scholar] [CrossRef]
- Xu, C.; Liu, H.; Li, P.; Wang, P. A remote attestation security model based on privacy-preserving blockchain for V2X. IEEE Access 2018, 6, 67809–67818. [Google Scholar] [CrossRef]
- Khatun, M.; Glaß, M.; Jung, R. An approach of scenario-based threat analysis and risk assessment over-the-air updates for an autonomous vehicle. In Proceedings of the 2021 7th International Conference on Automation, Robotics and Applications (ICARA), Prague, Czech Republic, 4–6 February 2021; pp. 122–127. [Google Scholar]
- Qureshi, A.; Marvi, M.; Shamsi, J.A.; Aijaz, A. eUF: A framework for detecting over-the-air malicious updates in autonomous vehicles. J. King Saud-Univ.-Comput. Inf. Sci. 2021, 34, 5456–5467. [Google Scholar] [CrossRef]
- Kondaveety, V.B.; Lamkuche, H.; Prasad, S. A zero trust architecture for next generation automobiles. AIP Conf. Proc. 2022, 2519, 030088. [Google Scholar]
- Alipour, M.A.; Ghasemshirazi, S.; Shirvani, G. Enabling a Zero Trust Architecture in a 5G-enabled Smart Grid. arXiv 2022, arXiv:2210.01739. [Google Scholar]
- Lian, Z.; Zeng, Q.; Wang, W.; Gadekallu, T.R.; Su, C. Blockchain-based two-stage federated learning with non-IID data in IoMT system. IEEE Trans. Comput. Soc. Syst. 2022, 10, 1701–1710. [Google Scholar] [CrossRef]
- Sarkar, S.; Choudhary, G.; Shandilya, S.K.; Hussain, A.; Kim, H. Security of zero trust networks in cloud computing: A comparative review. Sustainability 2022, 14, 11213. [Google Scholar] [CrossRef]
- Javed, A.R.; Shahzad, F.; ur Rehman, S.; Zikria, Y.B.; Razzak, I.; Jalil, Z.; Xu, G. Future smart cities requirements, emerging technologies, applications, challenges, and future aspects. Cities 2022, 129, 103794. [Google Scholar] [CrossRef]
- Sharma, P.; Gillanders, J. Cybersecurity and Forensics in Connected Autonomous Vehicles: A Review of the State-of-the-Art. IEEE Access 2022, 10, 108979–108996. [Google Scholar] [CrossRef]
- Feng, X.; Dawam, E.S.; Amin, S. A New Digital Forensics Model of Smart City Automated Vehicles. In Proceedings of the 2017 IEEE International Conference on Internet of Things (iThings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData), Exeter, UK, 21–23 June 2017; pp. 274–279. [Google Scholar] [CrossRef]
- Alexakos, C.; Katsini, C.; Votis, K.; Lalas, A.; Tzovaras, D.; Serpanos, D. Enabling digital forensics readiness for internet of vehicles. Transp. Res. Procedia 2021, 52, 339–346. [Google Scholar] [CrossRef]
- Sharma, P.; Austin, D.; Liu, H. Attacks on machine learning: Adversarial examples in connected and autonomous vehicles. In Proceedings of the 2019 IEEE International Symposium on Technologies for Homeland Security (HST), Woburn, MA, USA, 5–6 November 2019; pp. 1–7. [Google Scholar]
- Toledo, T.; Musicant, O.; Lotan, T. In-vehicle data recorders for monitoring and feedback on drivers’ behavior. Transp. Res. Part C Emerg. Technol. 2008, 16, 320–331. [Google Scholar] [CrossRef]
- Norden, J.; O’Kelly, M.; Sinha, A. Efficient black-box assessment of autonomous vehicle safety. arXiv 2019, arXiv:1912.03618. [Google Scholar]
- Royo, S.; Ballesta-Garcia, M. An overview of lidar imaging systems for autonomous vehicles. Appl. Sci. 2019, 9, 4093. [Google Scholar] [CrossRef]
- Dykstra, J.; Sherman, A.T. Design and implementation of FROST: Digital forensic tools for the OpenStack cloud computing platform. Digit. Investig. 2013, 10, S87–S95. [Google Scholar] [CrossRef]
- Kebande, V.; Venter, H. A functional architecture for cloud forensic readiness large-scale potential digital evidence analysis. In Proceedings of the European Conference on Cyber Warfare and Security; Academic Conferences International Limited, University of Hertfordshire: Hatfield, UK, 2015; p. 373. [Google Scholar]
- Terán, J.; Navarro, L.; Quintero M, C.G.; Pardo, M. Intelligent driving assistant based on road accident risk map analysis and vehicle telemetry. Sensors 2020, 20, 1763. [Google Scholar] [CrossRef] [PubMed]
- Elyas, M.; Maynard, S.B.; Ahmad, A.; Lonie, A. Towards a systemic framework for digital forensic readiness. J. Comput. Inf. Syst. 2014, 54, 97–105. [Google Scholar] [CrossRef]
- Valjarevic, A.; Venter, H. A harmonized process model for digital forensic investigation readiness. In Proceedings of the Advances in Digital Forensics IX: 9th IFIP WG 11.9 International Conference on Digital Forensics, Orlando, FL, USA, 28–30 January 2013; Revised Selected Papers 9. Springer: Berlin/Heidelberg, Germany, 2013; pp. 67–82. [Google Scholar]
- Ab Rahman, N.H.; Glisson, W.B.; Yang, Y.; Choo, K.K.R. Forensic-by-design framework for cyber-physical cloud systems. IEEE Cloud Comput. 2016, 3, 50–59. [Google Scholar] [CrossRef]
- Sun, Y.; Wu, L.; Wu, S.; Li, S.; Zhang, T.; Zhang, L.; Xu, J.; Xiong, Y.; Cui, X. Attacks and countermeasures in the internet of vehicles. Ann. Telecommun. 2017, 72, 283–295. [Google Scholar] [CrossRef]
- Vivan, G.P.; Goberville, N.; Asher, Z.D.; Brown, N.; Rojas, J.F. No Cost Autonomous Vehicle Advancements in CARLA through ROS; SAE International: Warrendale, PA, USA, 2021. [Google Scholar]
- Pérez-Gil, Ó.; Barea, R.; López-Guillén, E.; Bergasa, L.M.; Gomez-Huelamo, C.; Gutiérrez, R.; Diaz-Diaz, A. Deep reinforcement learning based control for Autonomous Vehicles in CARLA. Multimed. Tools Appl. 2022, 81, 3553–3576. [Google Scholar] [CrossRef]
- Bojarski, M.; Del Testa, D.; Dworakowski, D.; Firner, B.; Flepp, B.; Goyal, P.; Zhang, X. End to end learning for self-driving cars. arXiv 2016, arXiv:1604.07316. [Google Scholar]
- Shah, S.; Dey, D.; Lovett, C.; Kapoor, A. Airsim: High-fidelity visual and physical simulation for autonomous vehicles. In Proceedings of the Field and Service Robotics: Results of the 11th International Conference; Springer: Berlin/Heidelberg, Germany, 2018; pp. 621–635. [Google Scholar]
- Bondi, E.; Dey, D.; Kapoor, A.; Piavis, J.; Shah, S.; Fang, F.; Dilkina, B.; Hannaford, R.; Iyer, A.; Joppa, L.; et al. Airsim-w: A simulation environment for wildlife conservation with uavs. In Proceedings of the 1st ACM SIGCAS Conference on Computing and Sustainable Societies, Menlo Park and San Jose, CA, USA, 20–22 June 2018; pp. 1–12. [Google Scholar]
- Yao, S.; Zhang, J.; Hu, Z.; Wang, Y.; Zhou, X. Autonomous-driving vehicle test technology based on virtual reality. J. Eng. 2018, 2018, 1768–1771. [Google Scholar] [CrossRef]
- Koenig, N.; Howard, A. Design and use paradigms for gazebo, an open-source multi-robot simulator. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)(IEEE Cat. No. 04CH37566), Sendai, Japan, 28 September–2 October 2004; Volume 3, pp. 2149–2154. [Google Scholar]
- Furrer, F.; Burri, M.; Achtelik, M.; Siegwart, R. Rotors—a modular gazebo mav simulator framework. Robot. Oper. Syst. (Ros) Complet. Ref. 2016, 1, 595–625. [Google Scholar]
- Krajzewicz, D. Traffic simulation with SUMO–simulation of urban mobility. Fundam. Traffic Simul. 2010, 145, 269–293. [Google Scholar]
- Krajzewicz, D.; Erdmann, J.; Behrisch, M.; Bieker, L. Recent development and applications of SUMO-Simulation of Urban MObility. Int. J. Adv. Syst. Meas. 2012, 5. [Google Scholar]
- Schmittner, C.; Griessnig, G.; Ma, Z. Status of the Development of ISO/SAE 21434. In Proceedings of the Systems, Software and Services Process Improvement: 25th European Conference, EuroSPI 2018, Bilbao, Spain, 5–7 September 2018; Proceedings 25. Springer: Berlin/Heidelberg, Germany, 2018; pp. 504–513. [Google Scholar]
- Martin, J.; Carter, A. Nhtsa cybersecurity research. In Proceedings of the 25th International Technical Conference on the Enhanced Safety of Vehicles (ESV) National Highway Traffic Safety Administration, Washington, DC, USA, 5 June 2017. [Google Scholar]
- Schmittner, C.; Ma, Z.; Reyes, C.; Dillinger, O.; Puschner, P. Using SAE J3061 for automotive security requirement engineering. In Proceedings of the Computer Safety, Reliability, and Security: SAFECOMP 2016 Workshops, ASSURE, DECSoS, SASSUR, and TIPS, Trondheim, Norway, 20 September 2016; Proceedings 35. Springer: Berlin/Heidelberg, Germany, 2016; pp. 157–170. [Google Scholar]
- Udayakumar, P. Manage and Secure AVS. In Design and Deploy Azure VMware Solutions: Build and Run VMware Workloads Natively on Microsoft Azure; Springer: Berlin/Heidelberg, Germany, 2022; pp. 341–387. [Google Scholar]
- Anderson, J.M.; Nidhi, K.; Stanley, K.D.; Sorensen, P.; Samaras, C.; Oluwatola, O.A. Autonomous Vehicle Technology: A Guide for Policymakers; Rand Corporation: Santa Monica, CA, USA, 2014. [Google Scholar]
- Abu Bakar, A.I.; Abas, M.A.; Muhamad Said, M.F.; Tengku Azhar, T.A. Synthesis of autonomous vehicle guideline for public road-testing sustainability. Sustainability 2022, 14, 1456. [Google Scholar] [CrossRef]
- Mohsin, A.H.; Zaidan, A.; Zaidan, B.; Albahri, O.; Ariffin, S.A.B.; Alemran, A.; Enaizan, O.; Shareef, A.H.; Jasim, A.N.; Jalood, N.; et al. Finger vein biometrics: Taxonomy analysis, open challenges, future directions, and recommended solution for decentralised network architectures. IEEE Access 2020, 8, 9821–9845. [Google Scholar] [CrossRef]
- Bouchouia, M.L.; Labiod, H.; Jelassi, O.; Monteuuis, J.P.; Jaballah, W.B.; Petit, J.; Zhang, Z. A survey on misbehavior detection for connected and autonomous vehicles. Veh. Commun. 2023, 41, 100586. [Google Scholar] [CrossRef]
- De Marco, L.; Kechadi, M.T.; Ferrucci, F. Cloud forensic readiness: Foundations. In Proceedings of the Digital Forensics and Cyber Crime: Fifth International Conference, ICDF2C 2013, Moscow, Russia, 26–27 September 2013; Revised Selected Papers 5. Springer: Berlin/Heidelberg, Germany, 2014; pp. 237–244. [Google Scholar]












| Surveys | IILAV | ROU | DD | SPEV | CE | PA | PDC | TM | EI | PH | SA | DA | TSD | TMA | AI | FA | SIM | AS | ISG | ZT |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Parekh et al., 2022 [9] | X | X | X | X | X | X | X | X | ✓ | X | ✓ | ✓ | X | X | X | X | X | X | X | X |
| Aradi 2020 [10] | X | X | X | X | X | X | X | ✓ | ✓ | X | X | X | X | X | ✓ | X | ✓ | X | X | X |
| Faisal et al., 2019 [11] | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | ✓ | X |
| Ahangar et al., 2021 [12] | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | ✓ | X |
| Duarte et al., 2018 [13] | X | X | X | X | X | ✓ | X | ✓ | X | X | X | X | X | X | X | X | X | X | ✓ | X |
| Gkartzonikas et al., 2019 [14] | X | X | X | X | X | ✓ | X | X | X | X | X | X | X | X | X | X | X | X | X | X |
| Ma et al., 2020 [15] | X | X | X | X | X | X | X | X | X | X | X | X | X | X | ✓ | X | X | X | X | X |
| Pham et al., 2020 [16] | X | X | X | X | X | X | X | X | X | X | ✓ | ✓ | X | X | X | X | X | X | X | X |
| Kim et al., 2021 [17] | X | X | X | X | X | X | X | X | X | X | ✓ | ✓ | X | X | ✓ | X | X | X | X | X |
| Janai et al., 2020 [18] | X | X | X | X | X | X | X | X | X | X | X | X | X | X | ✓ | X | X | X | X | X |
| This Survey | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| Abbreviations | Description |
|---|---|
| AV | Autonomous Vehicle |
| CAGR | Compound Annual Growth Rate |
| CAN | Controller Area Network |
| VCC | Vehicular Cloud Computing |
| DFIRP | Digital Forensics Investigation Readiness Procedures |
| DRL | Deep Reinforcement Learning |
| ECU | Electronic Control Unit |
| FANET | Flying Ad Hoc Network |
| FL | Fuzzy Logic |
| GPS | Global Positioning System |
| GA | Genetic Algorithm |
| LiDAR | Light detection and Ranging |
| ML | Machine Learning |
| MBRL | Model-based RL |
| NLP | Natural Language Processing |
| OTA | Over-the-Air |
| P2P | Peer to Peer Network |
| PKI | Public Key Infrastructure |
| RL | Reinforcement Learning |
| SDN | Software Defined Networking |
| SUMO | Simulation of Urban Mobility |
| SLAM | Simultaneous Localization and Mapping |
| TDM | Time Division Multiple Access |
| VANETs | Vehicle Ad Hoc Network |
| V2X | Vehicle to Everything |
| V2I | Vehicle to Infrastructure |
| V2N | Vehicle to Network |
| V2P | Vehicle to Pedestrian |
| Paper | Contribution Area | Evaluation Approach | Main Contribution | Evaluation Metrics & Findings |
|---|---|---|---|---|
| Federated Learning with Blockchain (2020) | Federated learning Blockchain for AVs | Challenges analysis | Merge federated learning and Blockchain | Communication, privacy, scalability issues AV performance, security benefits |
| Federated Learning Controller Design (2022) | CAV controller design Federated learning | Not specified | Cooperative controller with federated learning | Over-the-road performance, cooperation |
| Bift: Blockchain-Based Federated Learning (2021) | Blockchain for CAVs Federated learning | Not specified | AV model training with federated learning | Data sharing, privacy, efficiency |
| WITHDRAWN: Efficient FL with Blockchain (2020) | Federated learning Blockchain for AVs | Not available | Withdrawn paper | Paper withdrawn |
| Privacy-Preserved FL for Autonomous Driving (2021) | Privacy-preserving FL AV collaborative improvement | Not specified | Privacy-enhanced AV model improvement | Privacy preservation shared knowledge |
| Paper | Contribution Area | Evaluation Approach | Main Contribution | Evaluation Metrics & Findings |
|---|---|---|---|---|
| [74] | Security | Simulation | Blockchain framework | Data integrity, security |
| CAVs | transparency, trust | |||
| [75] | Resilience | Literature review | AV security schemes | Attack analysis, |
| Industry 4.0 | categorization, gaps | |||
| [76] | Event | Not mentioned | Event recording system | Data integrity, |
| AVs | tamper resistance |
| Paper | Contribution Area | Evaluation Approach | Main Contribution | Evaluation Metrics | Findings |
|---|---|---|---|---|---|
| [83] | Path Following | Fuzzy Controller | Commands | Steering Speed | Successful |
| [84] | Lane Change | Fuzzy System | Commands | Steering Acceleration | Effective |
| [85] | Obstacle Avoidance | Fuzzy System | Commands | Steering Speed | Promising |
| [86] | Collision Avoidance | Fuzzy System | Safe Path | - | Efficient |
| [87] | Adaptive Cruise | Fuzzy System | Optimal Speed | Following Distance | Improved |
| Paper | Contribution Area | Evaluation Approach | Main Contribution | Findings |
|---|---|---|---|---|
| [90] | Navigation | RL Controller | Optimal Decisions | Successful |
| [91] | Cooperative Driving | Centralized RL | Traffic Flow | Improved |
| [92] | Adverse Weather | RL Controller | Driving Decisions | Adaptive |
| [93] | Learning from Humans | RL Framework | Driving Skills | Mimicry |
| [94] | Vehicle Platooning | Decentralized RL | Fuel Efficiency | Enhanced |
| Reference | Contribution Area | Evaluation Approach | Main Contribution | Findings |
|---|---|---|---|---|
| [98] | Navigation | Deep RL Controller | Optimal Decisions | Improved |
| [99] | Vehicle Platooning | Deep RL-based System | Fuel Efficiency | Enhanced |
| [100] | Challenging Scenarios | Deep RL Controller | Driving Decisions | Effective |
| [101] | Learning from Humans | Deep RL Framework | Driving Skills | Adaptive |
| [102] | High-Speed Obstacle Avoidance | Deep RL-based System | Rapid Decisions | Accurate |
| Reference | Contribution Area | Evaluation Approach | Main Contribution | Findings |
|---|---|---|---|---|
| [104] | Fuel Efficiency | GA-based Approach | Speed, Gear Optimization | Savings |
| [105] | Traffic Flow | GA-based Approach | Speed, Headway Optimization | Improvement |
| [106] | Obstacle Avoidance | GA-based Approach | Control Parameters | Success Rate |
| [107] | Vehicle Routing | GA-based Approach | Routing, Charging Optimization | Efficiency |
| [108] | Traffic Flow | GA-based Approach | Lane-Changing Optimization | Reduced Time |
| Reference | Contribution Area | Evaluation Approach | Main Contribution | Findings |
|---|---|---|---|---|
| [118] | Voice Assistant | DNN and Rules | Meaning Extraction | Accuracy, Robustness |
| [119] | Safety | NLU Integration | Situational Awareness | Enhanced |
| [120] | Intelligent Transportation | NLP Framework | User Understanding | Natural Interaction |
| [121] | Entertainment Control | Speech Recognition | User Intents | Personalized Control |
| [107] | Dialogue Management | RL and Hierarchical Structure | Multi-turn Conversations | Natural Communication |
| Reference | Contribution Area | Evaluation Approach | Main Contribution | Findings |
|---|---|---|---|---|
| [58] | Vehicle Routing | PSO Algorithm | Route Optimization | Efficiency |
| [124] | Cooperative Perception | Swarm-based Algorithm | Sensing, Perception | Enhanced |
| [125] | Path Planning | PSO Algorithm | Cooperative Planning | Efficiency |
| [120] | Adaptive Cruise Control | Swarm-based Algorithm | Traffic Flow, Fuel Consumption | Improved |
| [126] | Vehicle Platooning | PSO Algorithm | Formation, Movement Optimization | Efficiency |
| Sensor | Use of Sensor |
|---|---|
| Ultrasound | Parking assistance |
| Camera | Traffic sign recognition, Lane detection, Obstacle detection |
| LiDAR | Collision Avoidance |
| MMW Radar | Adaptive Cursive Control |
| GPS | Navigation |
| Target | Vulnerability in Target | Security Scheme | Consequences |
|---|---|---|---|
| Starting system by passive key-less entry | Passive, fake proximity | LF RFID Tag | Relay attack |
| Hitag2 | Lack of pseudorandom number generators | 48bit linear feedback shift registers and non-linear filter | Key recovery attack |
| Security Protocol Stack | Key storage | Advanced Encryption Standard | Fault injection attack |
| Megamos | Invertabilty, Lack of pseudo-random number generators | PIN code and a 96-bit secret key | Key recovery attack |
| Digital Signature System | secret key is too short | Challenge response protocol | Relay attack |
| Sr No | Tool /Model | Platform | Comments |
|---|---|---|---|
| 1 | FROST [223] | Open Stack Cloud Platform (IaaS) | •Gathered at the host operating system •Negating the need for cloud provider involvement in data collecting •No mechanism for Preserving the data |
| 2 | Cloud Forensic Readiness Evidence Analysis System (CFREAS) [224] | Map Reduce paradigm –Cloud-based | •Reduces the amount of time needed to analyze extensive evidence. •Handles the risk of the cloud being used to store the chain of custody and the absence of a single, centralized legal authority |
| 3 | Vehicle Data Recorders [220] | •Embedded Systems •Standalone devices •Cloud-based platform •Telemetries System | •Record various vehicle parameters such as speed, acceleration, steering, and sensor data, which can be used to recreate the events leading up to an incident. •Issues: Compromised Data •Integrity/Accessibility, Data Loss |
| 4 | Black Boxes [221] | •Magnetic Tape •Solid-state memory devices | •Specialized recorders that can capture data from the vehicle’s sensors, control systems, and other components. |
| 5 | Vehicle Telemetry Systems [225] | •Embedded Systems •Standalone devices •Cloud-based platform •Telemeters System | •Collect and transmit data in real-time from various vehicle sensors, allowing investigators to track the vehicle’s movements leading up to an incident. |
| 6 | Imaging Technologies [222] | Cameras | •Autonomous vehicles often use cameras and other imaging technologies to gather information about their surroundings. •Forensic tools can be used to analyze this data and recreate a visual representation of the events leading up to an incident. |
| 7 | Simulation and Reconstruction Software [3] | •These Tools allow investigators to simulate the movements and behavior of an autonomous vehicle leading up to an incident, helping to determine the cause. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sadaf, M.; Iqbal, Z.; Javed, A.R.; Saba, I.; Krichen, M.; Majeed, S.; Raza, A. Connected and Automated Vehicles: Infrastructure, Applications, Security, Critical Challenges, and Future Aspects. Technologies 2023, 11, 117. https://doi.org/10.3390/technologies11050117
Sadaf M, Iqbal Z, Javed AR, Saba I, Krichen M, Majeed S, Raza A. Connected and Automated Vehicles: Infrastructure, Applications, Security, Critical Challenges, and Future Aspects. Technologies. 2023; 11(5):117. https://doi.org/10.3390/technologies11050117
Chicago/Turabian StyleSadaf, Memoona, Zafar Iqbal, Abdul Rehman Javed, Irum Saba, Moez Krichen, Sajid Majeed, and Arooj Raza. 2023. "Connected and Automated Vehicles: Infrastructure, Applications, Security, Critical Challenges, and Future Aspects" Technologies 11, no. 5: 117. https://doi.org/10.3390/technologies11050117
APA StyleSadaf, M., Iqbal, Z., Javed, A. R., Saba, I., Krichen, M., Majeed, S., & Raza, A. (2023). Connected and Automated Vehicles: Infrastructure, Applications, Security, Critical Challenges, and Future Aspects. Technologies, 11(5), 117. https://doi.org/10.3390/technologies11050117