
Multi-UAV Unbalanced Targets Coordinated Dynamic Task Allocation in Phases



Abstract
:1. Introduction
2. Materials and Methods
2.1. Task Assignment in Multi-UAV Cooperative Combat
2.1.1. Description of the Multi-UAV Cooperative Task Assignment Decision Problem
- (1)
- For the ith UAV, the number of tasks it can perform should not exceed the maximum it can perform, namely:
- (2)
- The number of UAVs that execute the jth goal should not exceed the upper limit of the number of UAVs, namely:
- (3)
- When a UAV performs its mission, it needs to abide by certain task execution timing constraints; that is, it should first perform a reconnaissance mission before performing a strike mission, namely:
- (4)
- A UAV’s mission needs to be executed within the executable time range of the mission, namely:
- (5)
- Different stages of task execution require different numbers of UAVs to perform cooperatively, namely:
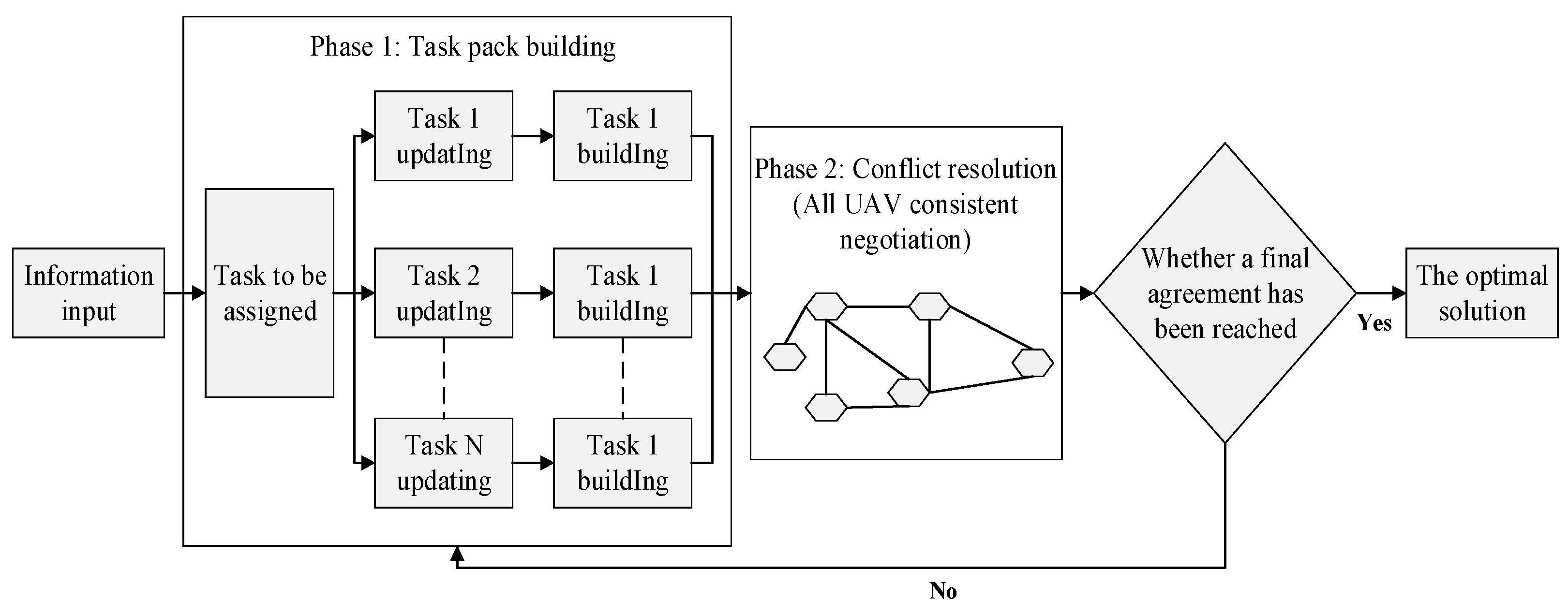
2.1.2. Consensus-Based Bundle Algorithm
2.1.3. Algorithmic Information Structure
- (1)
- Task package : Vector represents the task set assigned to UAV , which is arranged in the order of insertion.
- (2)
- Task path : represents the execution list of the task set assigned to UAV , and each task element starts its specific execution according to the task path.
- (3)
- Winner set : -dimensional matrix represents the task bidding information currently acquired by UAV ; represents that UAV confirms that UAV is the bidding winner of task ; otherwise, it is 0.
- (4)
- Winning bid price set : Matrix represents the UAV bidding information confirmed by UAV , which corresponds to the matrix of the winner set.
- (5)
- Timestamp : represents the latest moment of information exchange between UAV and its neighbouring UAVs. This plays an important role in the conflict resolution stage and represents the update degree of information obtained by the current interaction between UAV and other UAVs.
2.1.4. Task Selection Mechanism Improvement
2.1.5. Conflict Resolution
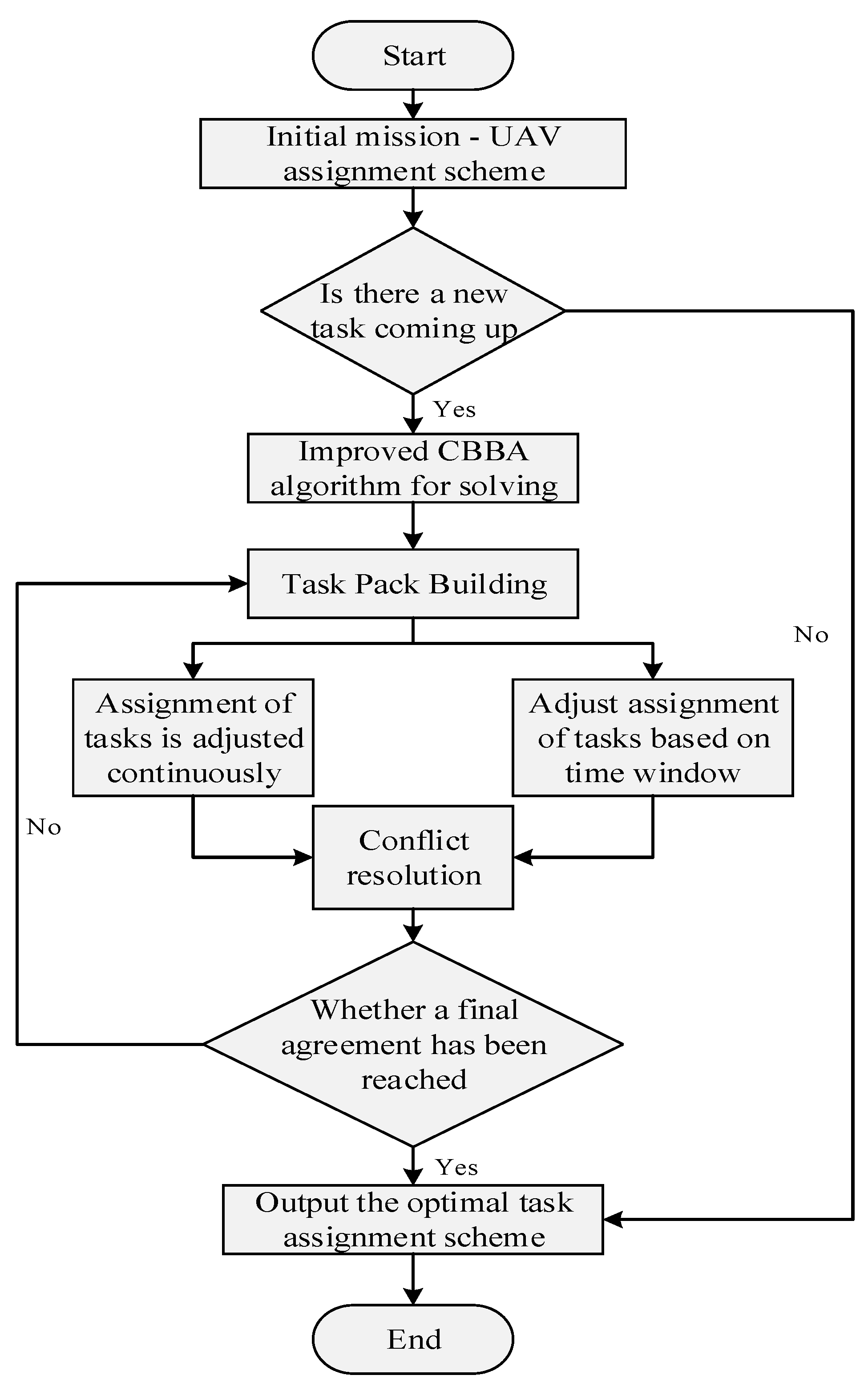
2.2. Dynamic Task Assignment Based on Improved CBBA
2.2.1. Overall Flow of the Algorithm
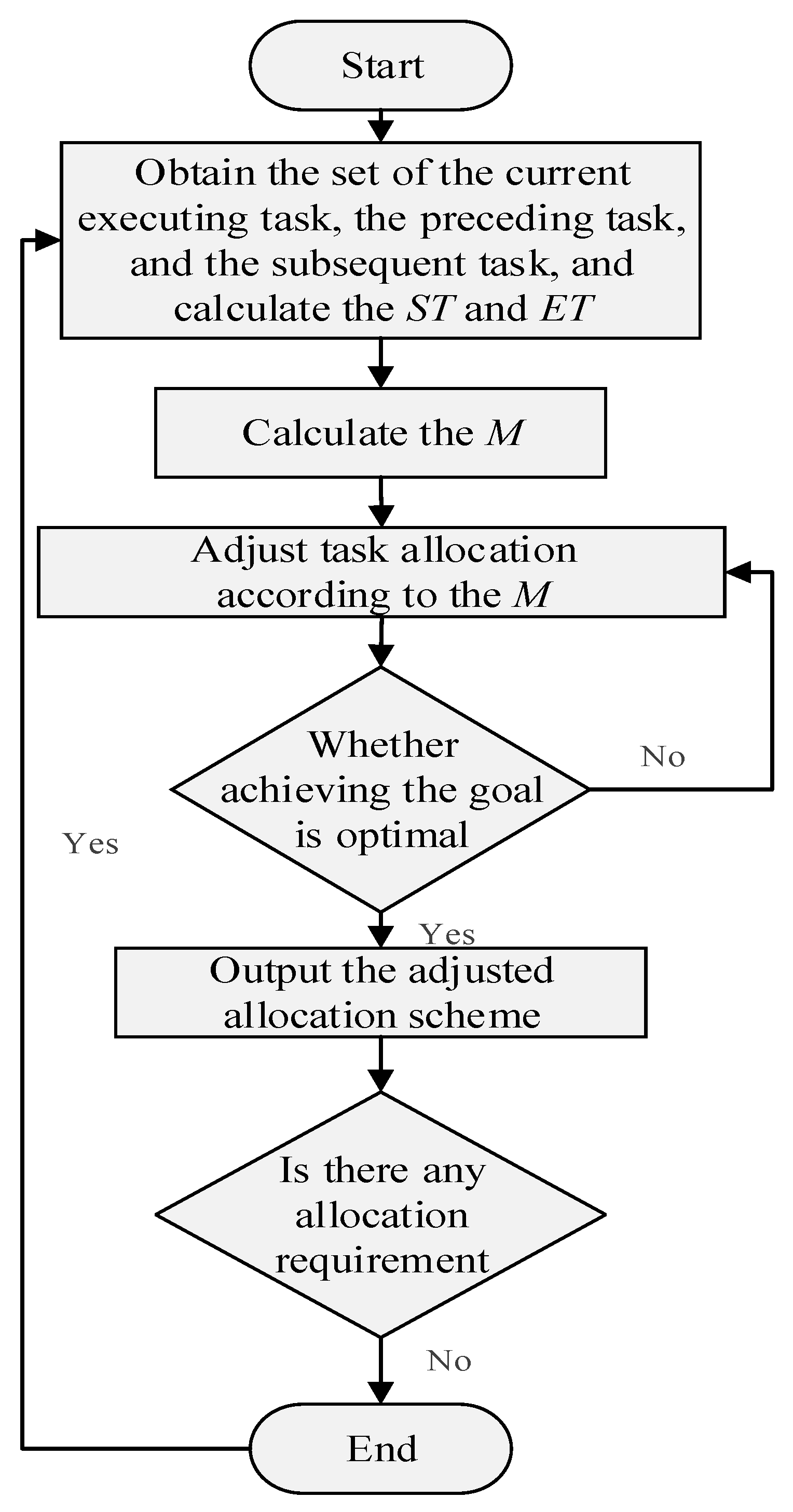
2.2.2. Task Continuity Adjustment Distribution
2.2.3. Task Allocation Adjustment Based on Time Windows
3. Results
3.1. Simulation Experiment Settings
3.2. Simulation Results and Analysis
- (1)
- New tasks occur when multiple UAVs perform tasks in the early stage, as shown in the following simulation (Figure 6):
- (2)
- New tasks occur in the late stage of multi-UAV missions, as shown in the simulation below (Figure 7):
3.3. Algorithm Performance Evaluation
3.3.1. Performance Evaluation of Multi-UAV and Multi-Target Collaborative Task Assignment in Stages
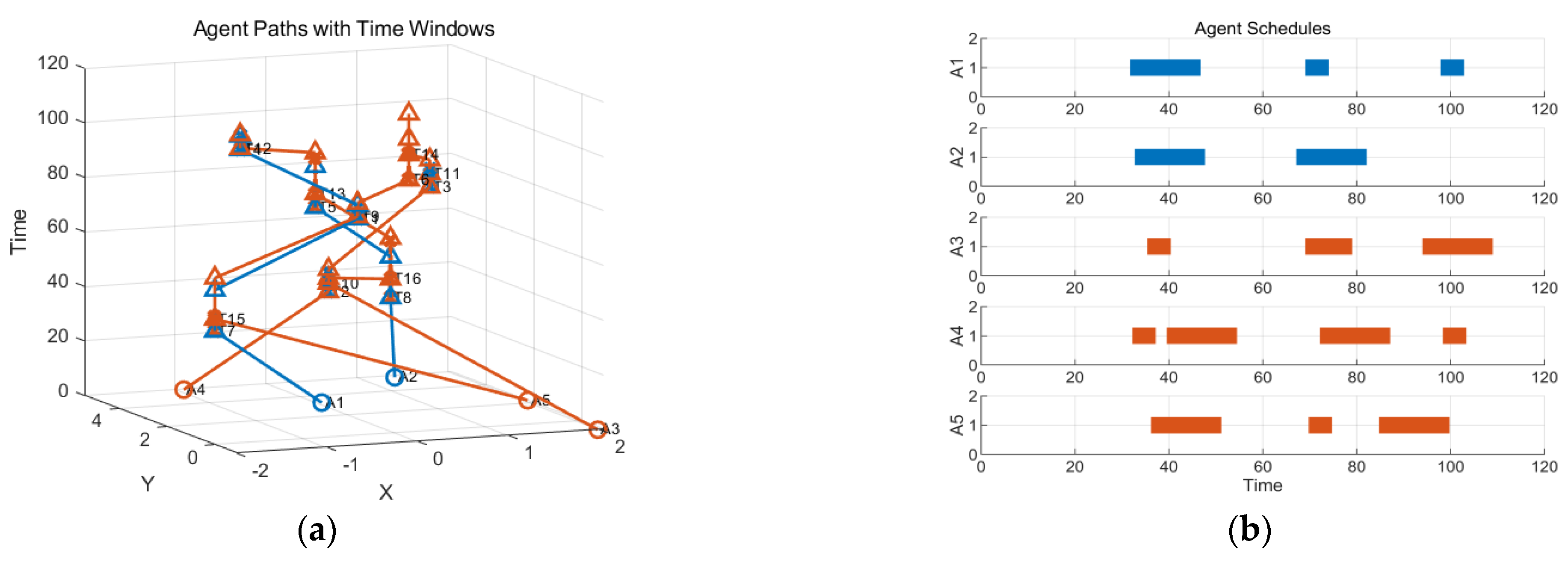
3.3.2. Dynamic Allocation Algorithm Performance Evaluation
- (1)
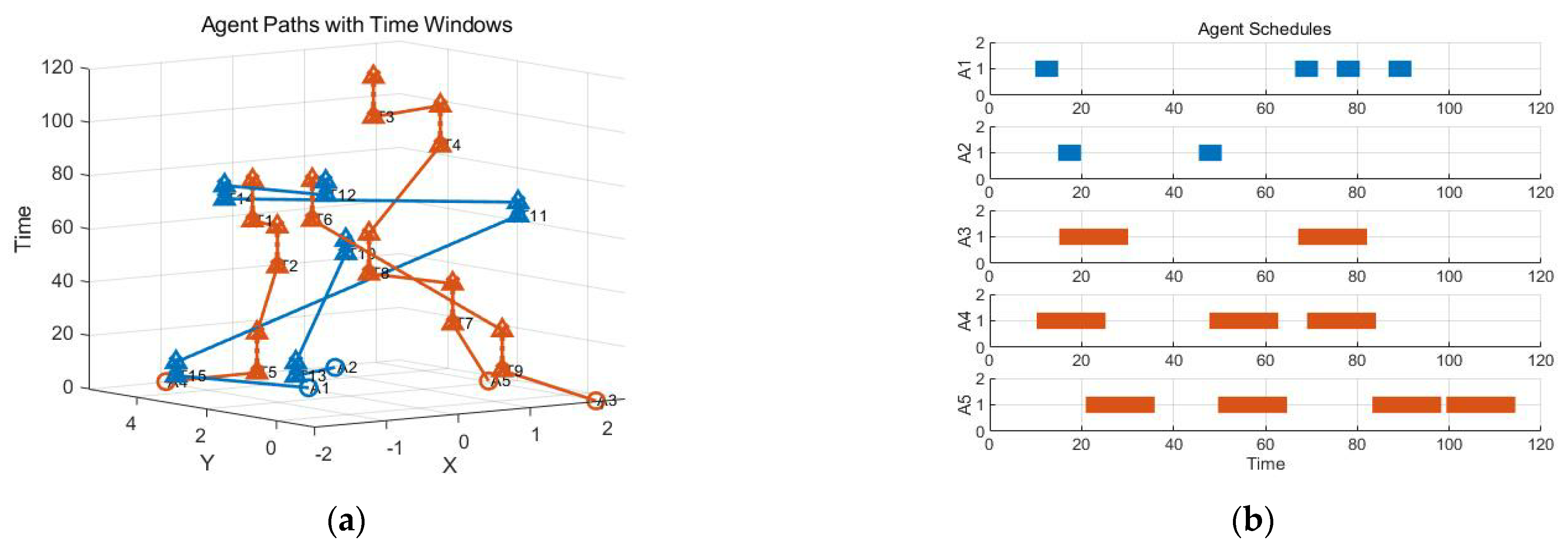
- In order to further compare the performance of dynamic task allocation by the CBBA, two new tasks were added on the basis of Scenario 1 for comparative simulation, and the results were compared with the CBBA’s complete reallocation strategy. In the CBBA used for the complete reallocation strategy, the UAV meets the task execution requirements, clears its original task assignment, and reconstructs its task package and task execution path for the new task, finally achieving the dynamic assignment of the new task. The reassignment result of the CBBA’s complete reallocation strategy is shown in Figure 9.
- (2)
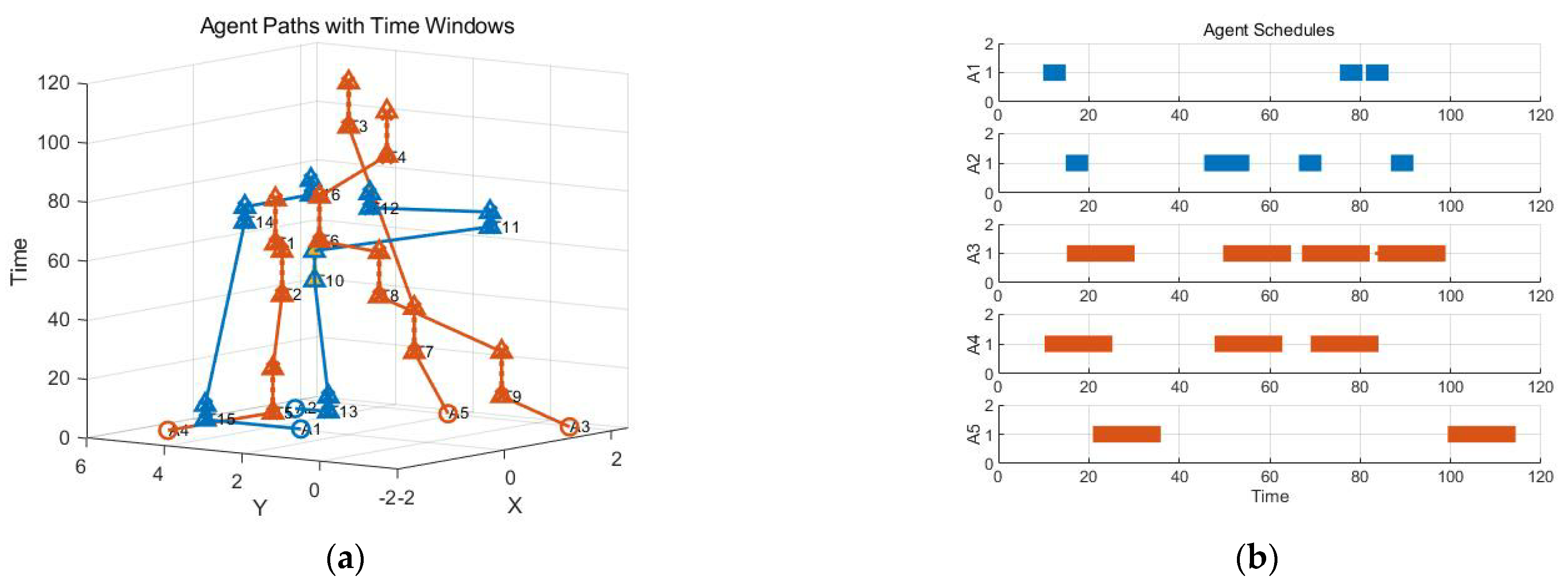
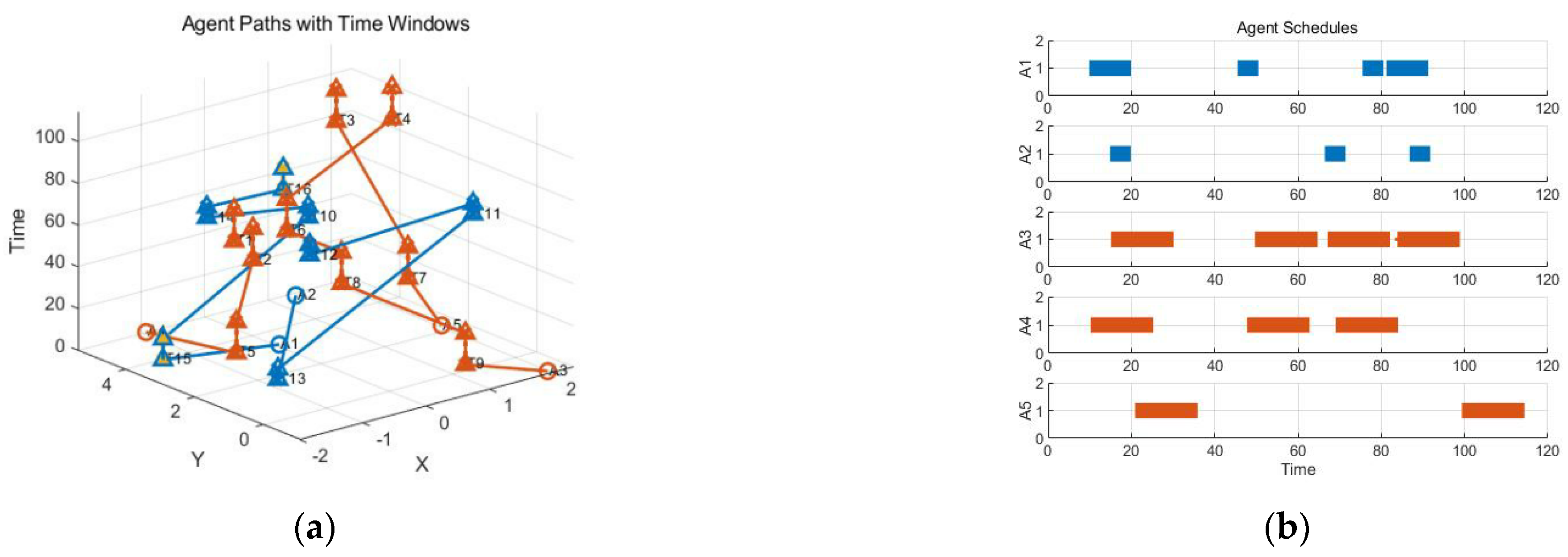
- For the same scenario, the specific situation of task continuity adjustment allocation in the improved CBBA is as shown in Figure 10.
- (3)
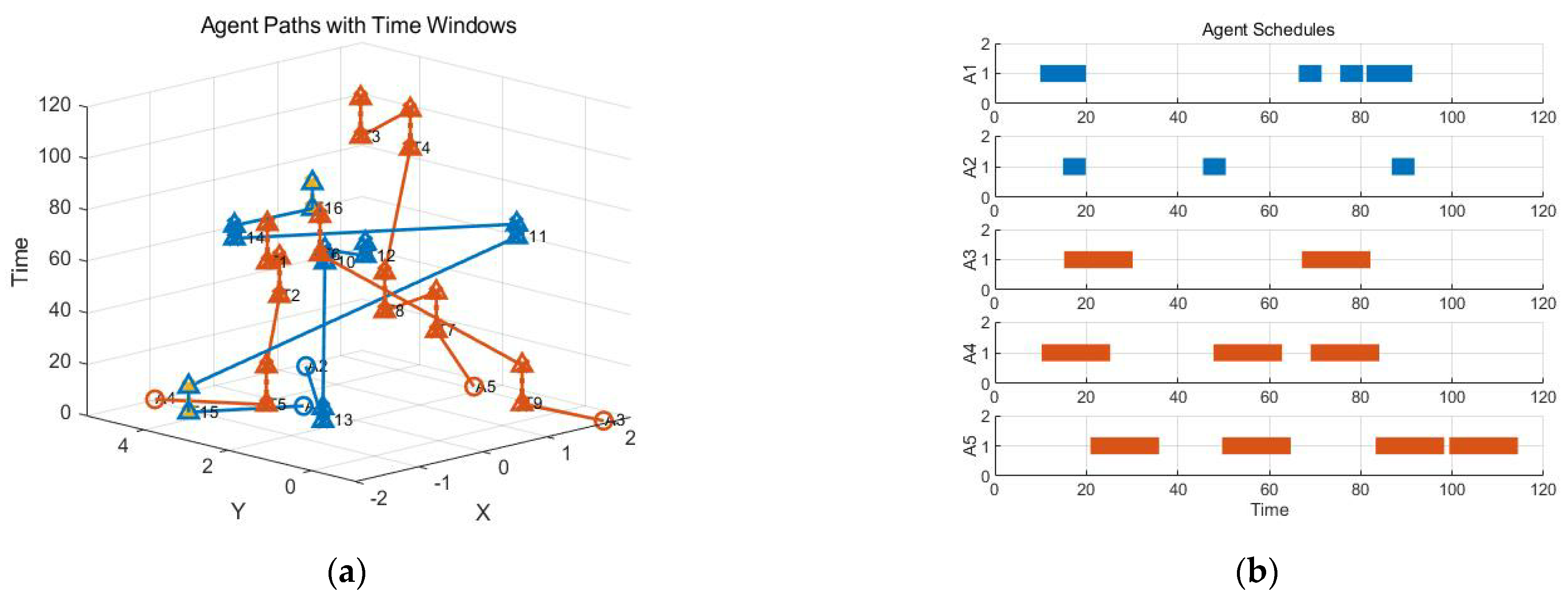
- For the same scenario test, the CBBA was used to add the adjustment allocation based on the task time window on the basis of the former test, as shown in Figure 11.
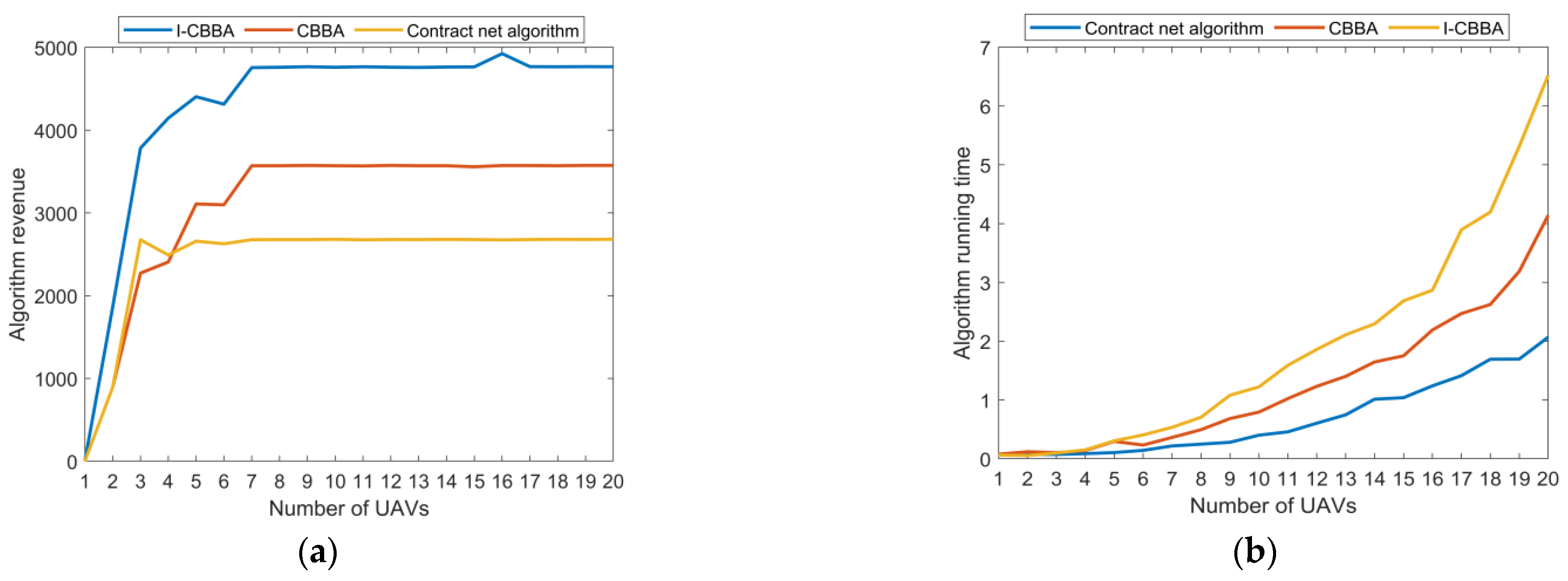
- (4)
- To further test the performance of the improved CBBA in unbalanced staged collaborative task assignments for multiple UAVs and targets, 1-20 UAVs were set up for collaborative execution of 15 tasks. The task assignment performance was compared with those of the original CBBA and contract network algorithms. The results are shown in Figure 12.
- (5)
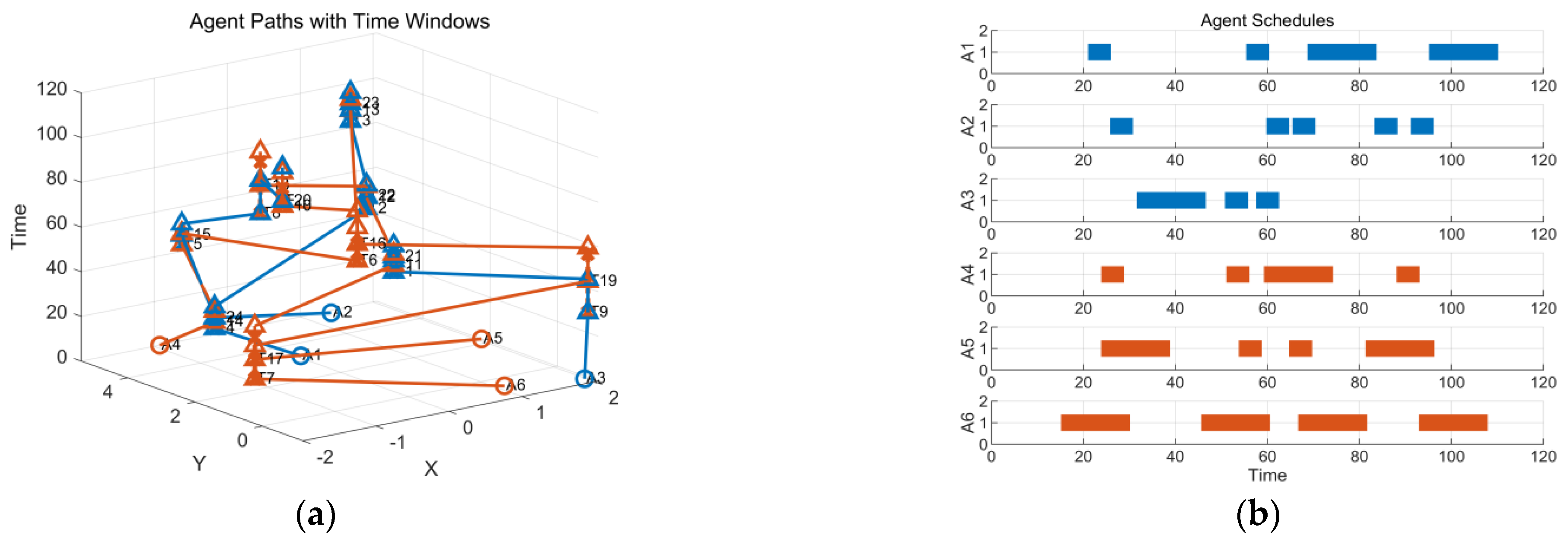
- To further test the applicability and effectiveness of the algorithm in UAV dynamic task assignment scenarios, 1 to 18 UAVs were assigned to 16 target tasks, including nine type I tasks, five type II tasks, and two dynamic tasks. The UAV type ratio was 1:1. The simulation test is shown in Figure 13.
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| xij | The assignment of UAV to task . |
| The maximum number of tasks that each UAV can perform. | |
| The number of tasks. | |
| The number of UAVs. | |
| The UAV set. | |
| The task set. | |
| Li | The maximum number of UAVs. |
| The maximum number of tasks that each UAV can perform. | |
| The starting times of the reconnaissance mission. | |
| The starting times of the strike mission. | |
| The start execution time. | |
| The end execution time. | |
| The kth execution period of the jth target. | |
| The distribution scheme. | |
| The task execution sequence. | |
| The time spent by UAV to perform task . | |
| The time for UAV to start its mission. | |
| The time for UAV to end its mission. | |
| The time when the UAV performed the mission. | |
| bi | The task package. |
| The task path. | |
| The winner set. | |
| The winning bid price set. | |
| The timestamp. | |
| The total revenue of UAV ’s task allocation. | |
| The revenue from task execution. | |
| The start time of UAV performing task . | |
| tjs | The start time of task . |
| The end execution time of task . | |
| ζij | The mission distance cost of the UAV. |
| The straight-line distance between UAV and task . | |
| γ | The distance cost coefficient. |
| The profit function coefficient of UAV performing task . | |
| The UAV ’s bid for mission . | |
| The starting execution time set. | |
| The difference in the start execution times of adjacent tasks. | |
| The time of message receipt. | |
| The information interaction between UAV and UAV . | |
| The time for new tasks to appear. | |
| The task execution sequence of UAV i. | |
| The conflict-free task set at any execution time after . | |
| The order of the task in the execution sequence. | |
| The individual UAV in the task execution sequence to which the task belongs. | |
| The total number of conflict-free tasks. | |
| The minimum threshold of the cost ratio. | |
| d+ | The maximum threshold of the cost ratio. |
| The algorithm iteration counting notation. | |
| The execution relationship between UAV and task . | |
| The execution time of a task. | |
| The earliest start time of a task. | |
| The latest start time of a task. | |
| dt | The time that the UAV takes to reach the task location. |
| The proportion of the task time window of the UAV to start the task at time in the overall time window. | |
| The time set of all tasks that can be started within the time window. | |
| The pre-task set. | |
| The follow-up task set. | |
| The expected task execution time. | |
| dt1 | The distance between UAV and the currently executed task. |
| The distance between the locations of prior and current tasks. | |
| The distance between the follow-up and current task locations. | |
| The start time of the prior task. | |
| The execution time of the prior task. | |
| The end time of the current task. | |
| The start time of the follow-up task. | |
| The execution time of the current task. |
References
- Elmeseiry, N.; Alshaer, N.; Ismail, T. A Detailed Survey and Future Directions of Unmanned Aerial Vehicles (UAVs) with Potential Applications. Aerospace 2022, 8, 363. [Google Scholar] [CrossRef]
- Eaton, C.M.; Chong, E.K.P.; Maciejewski, A.A. Multiple-Scenario Unmanned Aerial System Control: A Systems Engineering Approach and Review of Existing Control Methods. Aerospace 2016, 3, 1. [Google Scholar] [CrossRef]
- Liu, X.Y.; Yan, C.; Zhou, H. Towards Flocking Navigation and Obstacle Avoidance for Multi-UAV Systems through Hierarchical Weighting Vicsek Model. Aerospace 2021, 8, 286. [Google Scholar] [CrossRef]
- Jia, Z.; Yu, J.; Ai, X.; Xu, X.; Yang, D. Cooperative multiple task assignment problem with stochastic velocities and time windows for heterogeneous unmanned aerial vehicles using a genetic algorithm. Aerosp. Sci. Technol. 2018, 76, 112–125. [Google Scholar] [CrossRef]
- Fan, C.; Han, S.; Li, X.; Zhang, T.; Yuan, Y. A modified nature-inspired meta-heuristic methodology for heterogeneous unmanned aerial vehicle system task assignment problem. Soft Comput. 2021, 25, 14227–14243. [Google Scholar] [CrossRef]
- Kumar, D.; Baranwal, G.; Raza, Z.; Vidyarthi, D.P. A Novel Hybrid Auction Algorithm for Multi-UAVs Dynamic Task Assignment. IEEE Access 2020, 8, 86207–86222. [Google Scholar]
- Shima, T.; Rasmussen, S.; Gross, D. Assigning micro UAVs to task tours in an urban terrain. IEEE Trans. Control Syst. Technol. 2007, 15, 601–612. [Google Scholar] [CrossRef]
- Koerkamp, N.K.; Borst, C.; Mulder, M.; van Paassen, M.M. Supporting Humans in Solving Multi-UAV Dynamic Vehicle Routing Problems. IFAC 2020, 52, 359–364. [Google Scholar] [CrossRef]
- Hong, Y.; Jung, S.; Kim, S.; Cha, J. Multi-UAV Routing with Priority using Mixed Integer Linear Programming. In Proceedings of the 2020 20th International Conference on Control, Automation and Systems (ICCAS), Busan, Korea, 13–16 October 2020; pp. 699–702. [Google Scholar]
- Zardashti, R.; Yazdanpanah, M.J.; Nikkhah, A.A. Nonlinear Multiobjective Time-Dependent TF/TA Trajectory Planning Using a Network Flow-Based Algorithm. J. Aerosp. Eng. 2016, 29, 04015041. [Google Scholar] [CrossRef]
- Shi, J.; Tan, L.; Lian, X.; Xu, T.; Zhang, H.; Zhang, Y. A multi- unmanned aerial vehicle dynamic task assignment method based on bionic algorithms. Comput. Electr. Eng. 2022, 99, 107820. [Google Scholar] [CrossRef]
- Oh, G.; Kim, Y.; Ahn, J.; Choi, H.L. Market-Based Distributed Task Assignment of Multiple Unmanned Aerial Vehicles for Cooperative Timing Mission. J. Aircr. 2017, 54, 2298–2310. [Google Scholar] [CrossRef]
- Fu, X.; Feng, P.; Gao, X. Swarm UAVs Task and Resource Dynamic Assignment Algorithm Based on Task Sequence Mechanism. IEEE Access 2019, 7, 41090–41100. [Google Scholar] [CrossRef]
- Cao, W.J.; Xu, S.H. A New Multi-UAV Cooperation Method. ISCID 2016, 2, 231–234. [Google Scholar]
- Zhu, J.Y.; He, Q.F.; Wang, T.Z.; Wang, Z.T. Multiobjective mission planning for UAV under uncertain environment. MECIT 2014, 556–562, 4435–4438. [Google Scholar] [CrossRef]
- Yin, X.; Zhang, K.; Li, B.; Sangaiah, A.K.; Wang, J. A task allocation strategy for complex applications in heterogeneous cluster-based wireless sensor networks. Int. J. Distrib. Sens. Netw. 2018, 14, 1550147718795355. [Google Scholar] [CrossRef]
- Ragi, S.; Mittelmann, H.D. Mixed-Integer Nonlinear Programming Formulation of a UAV Path Optimization Problem. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 406–411. [Google Scholar]
- Zhen, Z.Y.; Xing, D.J.; Gao, C. Cooperative search-attack mission planning for multi-UAV based on intelligent self-organized algorithm. Aerosp. Sci. Technol. 2018, 76, 402–411. [Google Scholar] [CrossRef]
- Sugano, R.; Takeuchi, N.; Sekiguchi, K.; Nonaka, K. Layer Structured Multiple-UAV System Mixing Centralized and Distributed Agents. In Proceedings of the 2020 IEEE/SICE International Symposium on System Integration (SII), Honolulu, HI, USA, 12–15 January 2020; pp. 915–920. [Google Scholar]
- Kumar, D.; Baranwal, G.; Raza, Z.; Vidyarthi, D.P. Fair Mechanisms for Combinatorial Reverse Auction-Based Cloud Market. In Proceedings of the 2020 IEEE/SICE International Symposium on System Integration (SII), Honolulu, HI, USA, 12–15 January 2019; Volume 107, pp. 267–277. [Google Scholar]
- Zhang, J.; Xing, J.H. Cooperative task assignment of multi-UAV system. Chin. J. Aeronaut. 2021, 33, 2825–2827. [Google Scholar] [CrossRef]
- Choi, H.L.; Brunet, L.; How, J.P. Consensus-Based Decentralized Auctions for Robust Task Allocation. IEEE Trans. Robot. 2009, 25, 912–926. [Google Scholar] [CrossRef]
- Hunt, S.; Meng, Q.; Hinde, C.J. An Extension of the Consensus-Based Bundle Algorithm for Multi-Agent Tasks with Task Based Requirements. In Proceedings of the 2012 11th International Conference on Machine Learning and Applications, Boca Raton, FL, USA, 12–15 December 2012; Volume 2, pp. 451–456. [Google Scholar]
- Zhang, Y.; Feng, W.; Shi, G.; Jiang, F.; Chowdhury, M.; Ling, S.H. UAV Swarm Mission Planning in Dynamic Environment Using Consensus-Based Bundle Algorithm. Sensors 2020, 20, 2307. [Google Scholar] [CrossRef]
- Bai, X.S.; Cao, M.; Yan, W.S. Event- and time-triggered dynamic task assignments for multiple vehicles. Auton. Trans. Robot. 2020, 44, 877–888. [Google Scholar] [CrossRef]
- Qin, B.; Zhang, D.; Tang, S.; Wang, M. Distributed Grouping Cooperative Dynamic Task Assignment Method of UAV Swarm. Appl. Sci. 2022, 12, 2865. [Google Scholar] [CrossRef]
- Hunt, S.; Meng, Q.; Hinde, C.; Huang, T. A Consensus-Based Grouping Algorithm for Multi-agent Cooperative Task Allocation with Complex Requirements. Cogn. Comput. 2014, 6, 338–350. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, X.; Liu, Y.; Yin, L.; Qi, L. Cooperative Task Assignment and Track Planning For Multi-UAV Attack Mobile Targets. J. Intell. Robot. Syst. 2020, 100, 1383–1400. [Google Scholar] [CrossRef]
- Zitouni, F.; Harous, S.; Maamri, R. A Distributed Approach to the Multi-Robot Task Allocation Problem Using the Consensus-Based Bundle Algorithm and Ant Colony System. IEEE Access 2020, 8, 27479–27494. [Google Scholar] [CrossRef]
- Yang, M.; Bi, W.; Zhang, A.; Gao, F. A distributed task reassignment method in dynamic environment for multi-UAV system. Appl. Intell. 2021, 52, 1582–1601. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, X.X. Task Assignment Based on Improved Dynamic Contract Net and Ant Colony Search Strategy. In Proceedings of the Proceedings 2013 International Conference on Mechatronic Sciences, Electric Engineering and Computer (MEC), Shenyang, China, 20–22 December 2013; pp. 2880–2883. [Google Scholar]
- Murray, C.C.; Karwan, M.H. An Extensible Modeling Framework for Dynamic Reassignment and Rerouting in Cooperative Airborne Operations. Nav. Res. Logist. 2010, 57, 634–652. [Google Scholar] [CrossRef]
- Yao, W.; Qi, N.; Wan, N.; Liu, Y. An iterative strategy for task assignment and path planning of distributed multiple unmanned aerial vehicles. Aerosp. Sci. Technol. 2019, 86, 455–464. [Google Scholar] [CrossRef]
- Zhang, Z.S.; Liu, H.; Wu, G.H. A Dynamic Task Scheduling Method for Multiple UAVs Based on Contract Net Protocol. Sensors 2010, 22, 4486. [Google Scholar] [CrossRef]
- Chen, J.; Qing, X.; Ye, F.; Xiao, K.; You, K.; Sun, Q. Consensus-based bundle algorithm with local replanning for heterogeneous multi-UAV system in the time-sensitive and dynamic environment. J. Supercomput. 2021, 78, 1712–1740. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Task Identity | Task Coordinates | Task Type | |
|---|---|---|---|
| Reconnaissance Class | Strike Class | ||
| 1 | (−1.3,2.6) | √ | |
| 2 | (0.3,2.7) | √ | |
| 3 | (−1.1,2.5) | √ | |
| 4 | (1.1,4.4) | √ | |
| 5 | (0.3,4.5) | √ | |
| 6 | (0.7,5.5) | √ | |
| 7 | (1.7,5.2) | √ | |
| 8 | (0.7,2.0) | √ | |
| UAV Identity | Initial Position | Ability Type | Maximum Number of Tasks That Can Be Executed | Speed (m/s) |
|---|---|---|---|---|
| 1 | (0.05,3.3) | I | 5 | 30 |
| 2 | (1.4,5.3) | I | 5 | 35 |
| 3 | (1.9,−0.9) | II | 5 | 50 |
| 4 | (−0.9,5.4) | II | 5 | 40 |
| 5 | (2.0,2.3) | II | 5 | 30 |
| Task Identity | Task Coordinates | Task Type | |
|---|---|---|---|
| Reconnaissance Class | Strike Class | ||
| 1 | (−1.3,2.1) | √ | |
| 2 | (−0.6,3.0) | √ | |
| 3 | (1.0,3.3) | √ | |
| 4 | (2.4,4.2) | √ | |
| 5 | (−1.1,2.5) | √ | |
| 6 | (−0.5,2.0) | √ | |
| 7 | (1.7,2.8) | √ | |
| 8 | (−0.3,0.8) | √ | |
| 9 | (0.6,−1.1) | √ | |
| 10 | (1.2,4.4) | √ | |
| 11 | (1.7,0.8) | √ | |
| 12 | (−1.8,−1.0) | √ | |
| 13 | (−1.5,0.5) | √ | |
| 14 | (−1.3,2.8) | √ | |
| 15 | (−1.9,3.1) | √ | |
| UAV Identity | Initial Position | Ability Type | Maximum Number of Tasks That Can Be Executed | Speed (m/s) |
|---|---|---|---|---|
| 1 | (0.1,3.3) | I | 5 | 30 |
| 2 | (1.4,5.2) | I | 5 | 35 |
| 3 | (2.0,−1.0) | II | 5 | 50 |
| 4 | (−0.9,5.4) | II | 5 | 40 |
| 5 | (2.1,2.3) | II | 5 | 30 |
| UAV Identity | Task Execution Path | Flight Distance | Task Execution Time |
|---|---|---|---|
| 1 | (15,I)→(11,I)→(14,I)→(12,I) | 16 | {10,15},{64,69},{76,81},{86,91} |
| 2 | (13,I)→(10,I) | 9 | {15,20},{45,50} |
| 3 | (9,II)→(6,II) | 5 | {18,33},{67,82} |
| 4 | (5,II)→(2,II)→(1,II) | 14 | {10,25},{47,62},{69,84} |
| 5 | (7,II)→(8,II)→(4,II)→(3,II) | 20 | {21,37},{49,64},{83,98},{99,114} |
| UAV Identity | Task Execution Path | Flight Distance | Task Execution Time |
|---|---|---|---|
| 1 | (15,I)→(14,I)→(16,I) | 10 | {10,15},{76,81},{82,87} |
| 2 | (13,I)→(10,III)→(11,I)→(12,I) | 15 | {15,20},{45,55},{64,69},{86,91} |
| 3 | (9,II)→(8,II)→(6,II)→(4,II) | 21 | {18,33},{49,64},{67,82},{83,98} |
| 4 | (5,II)→(2,II)→(1,II) | 14 | {10,25},{47,62},{69,84} |
| 5 | (7,II)→(3,II) | 15 | {21,37},{99,114} |
| UAV Identity | Task Execution Path | Flight Distance | Task Execution Time |
|---|---|---|---|
| 1 | (15,I)→(10,I)→(14,I)→(16,I) | 16 | {10,15},{45,50},{76,81},{82,92} |
| 2 | (13,I)→(11,I)→(12,I) | 11 | {15,20},{64,69},{86,91} |
| 3 | (9,II)→(8,II)→(6,II)→(4,II) | 21 | {18,33},{49,64},{67,82},{83,98} |
| 4 | (5,II)→(2,II)→(1,II) | 14 | {10,25},{47,62},{69,84} |
| 5 | (7,II)→(3,II) | 15 | {21,37},{99,114} |
| UAV Identity | Task Execution Path | Flight Distance | Task Execution Time |
|---|---|---|---|
| 1 | (15,III)→(11,I)→(14,I)→(16,III) | 18 | {10,20},{64,69},{76,81},{82,92} |
| 2 | (13,I)→(10,I)→(12,I) | 10 | {15,20},{45,50},{86,91} |
| 3 | (9,II)→(6,II) | 13 | {18,33},{67,82} |
| 4 | (5,II)→(2,II)→(1,II) | 14 | {10,25},{47,62},{69,84} |
| 5 | (7,II)→(8,II)→(4,II)→(3,II) | 22 | {21,37},{49,64},{83,98},{99,114} |
| UAV Identity | Task Execution Path | Flight Distance | Task Execution Time |
|---|---|---|---|
| 1 | (15,III)→(16,III) | 9 | {10,20},{82,92} |
| 2 | (13,I)→(10,I)→(11,I)→(14,I)→(12,I) | 19 | {15,20},{45,50},{64,69},{76,81},{86,91} |
| 3 | (9,II)→(8,II)→(6,II)→(4,II) | 16 | {18,33},{49,64},{67,82},{83,98} |
| 4 | (5,II)→(2,II)→(1,II) | 14 | {10,25},{47,62},{69,84} |
| 5 | (7,II)→(3,II) | 10 | {21,37},{99,114} |
| UAV Identity | Task Execution Path | Flight Distance | Task Execution Time |
|---|---|---|---|
| 1 | (15,III)→(10,I)→(14,I)→(16,III) | 11 | {10,20},{45,50},{76,81},{82,92} |
| 2 | (13,I)→(11,I)→(12,I) | 12 | {15,20},{64,69},{86,91} |
| 3 | (9,II)→(8,II)→(6,II)→(4,II) | 16 | {18,33},{49,64},{67,82},{83,98} |
| 4 | (5,II)→(2,II)→(1,II) | 14 | {10,25},{47,62},{69,84} |
| 5 | (7,II)→(3,II) | 10 | {21,37},{99,114} |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, W.; Lv, M.; Ru, L.; Lu, B.; Hu, S.; Chang, X. Multi-UAV Unbalanced Targets Coordinated Dynamic Task Allocation in Phases. Aerospace 2022, 9, 491. https://doi.org/10.3390/aerospace9090491
Wang W, Lv M, Ru L, Lu B, Hu S, Chang X. Multi-UAV Unbalanced Targets Coordinated Dynamic Task Allocation in Phases. Aerospace. 2022; 9(9):491. https://doi.org/10.3390/aerospace9090491
Chicago/Turabian StyleWang, Wenfei, Maolong Lv, Le Ru, Bo Lu, Shiguang Hu, and Xinlong Chang. 2022. "Multi-UAV Unbalanced Targets Coordinated Dynamic Task Allocation in Phases" Aerospace 9, no. 9: 491. https://doi.org/10.3390/aerospace9090491
APA StyleWang, W., Lv, M., Ru, L., Lu, B., Hu, S., & Chang, X. (2022). Multi-UAV Unbalanced Targets Coordinated Dynamic Task Allocation in Phases. Aerospace, 9(9), 491. https://doi.org/10.3390/aerospace9090491