
Factors Impacting Chinese and European Vertical Fight Efficiency




Abstract
:1. Introduction
State of the Art
2. Methodical Approach
2.1. Data
2.2. Extraction of Cruising Altitudes and Level-Flight Segments from ADS-B Data
2.3. Operational Constraints in China and Europe
2.4. Chinese Airspace Specifications
2.5. European Airspace Specifications
3. Four-Dimensional Aircraft Trajectory Optimization
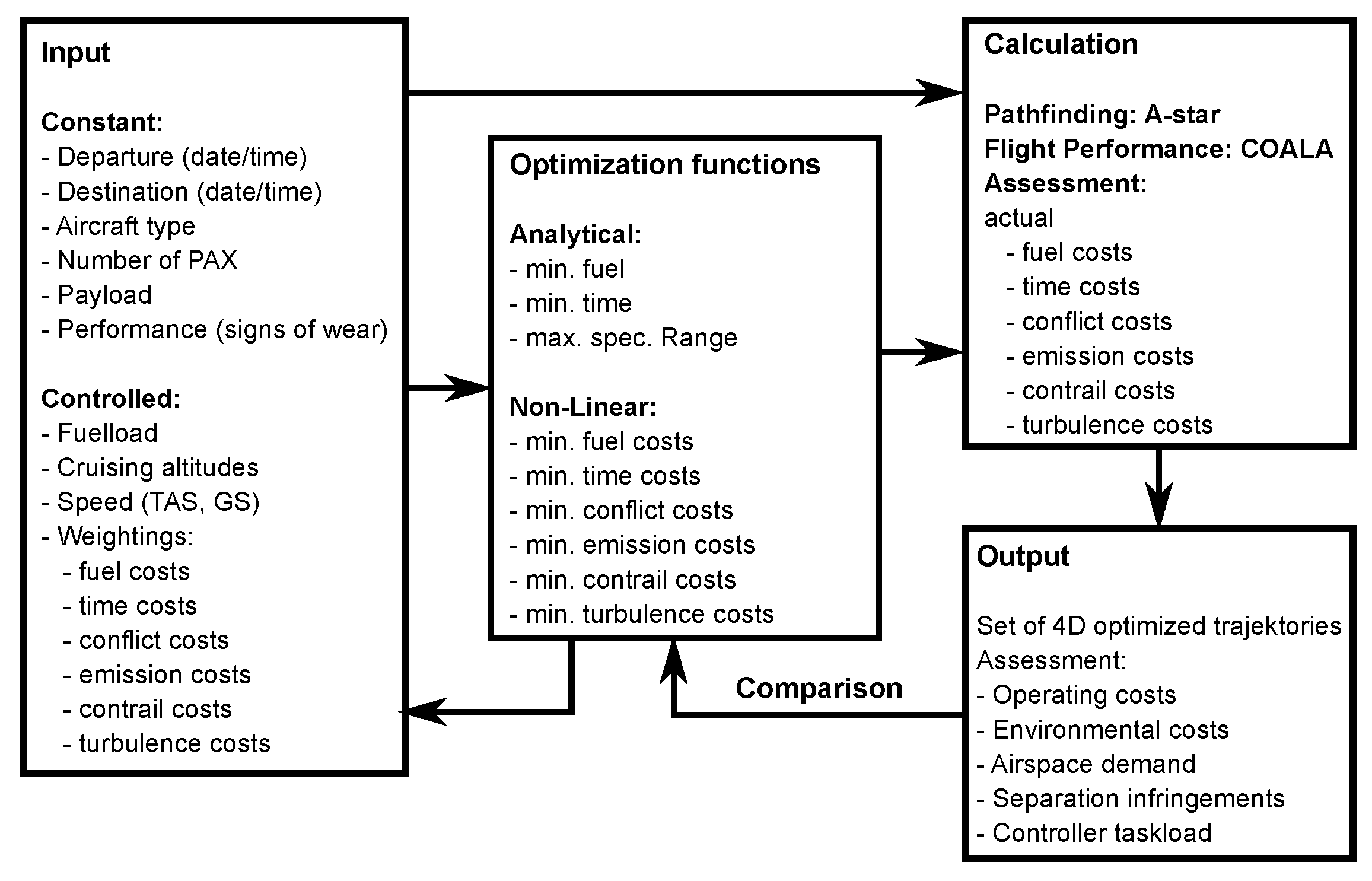
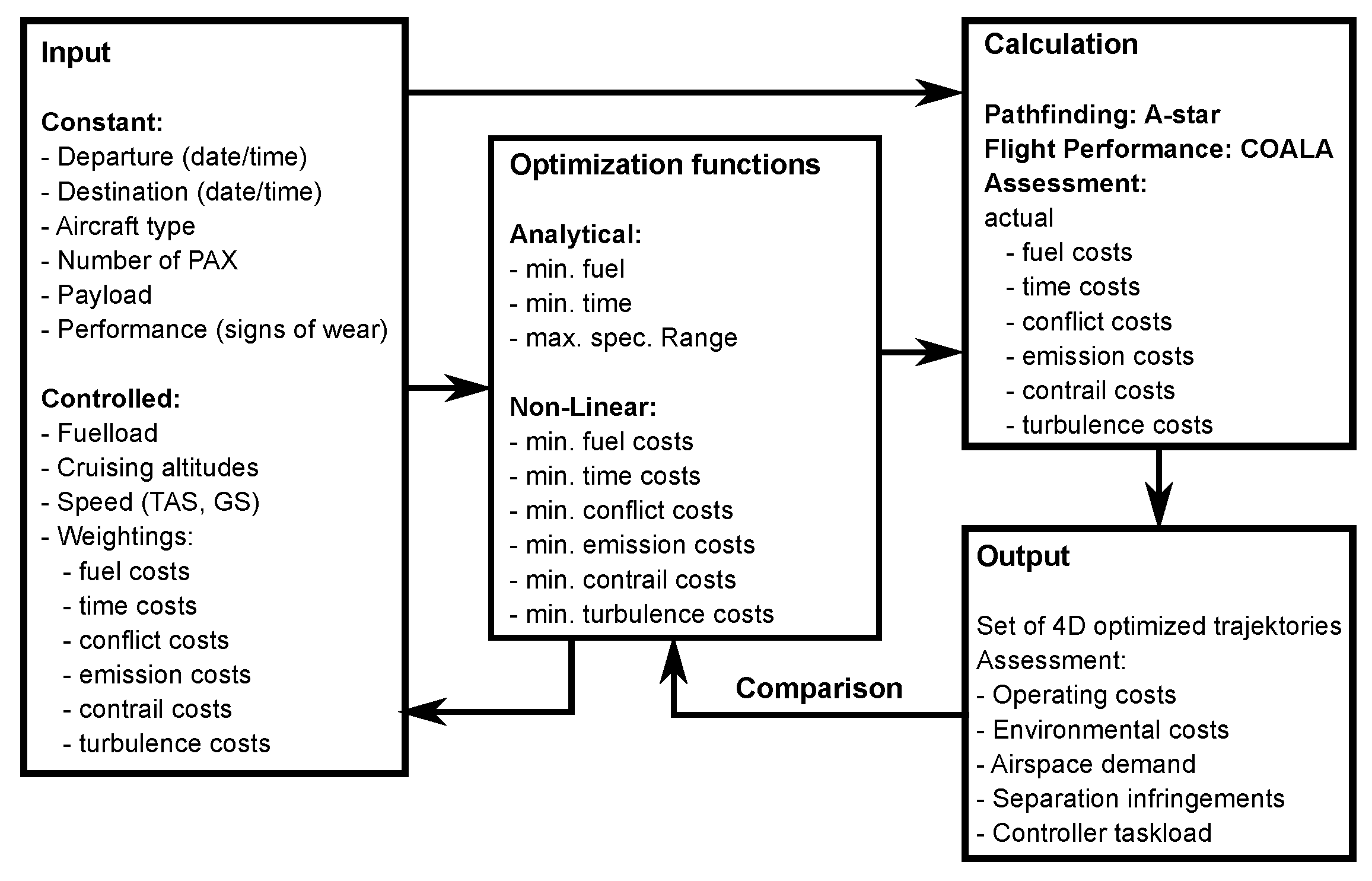
3.1. Trajectory Optimization Simulation Environment TOMATO
3.2. Lateral Path Finding in TOMATO
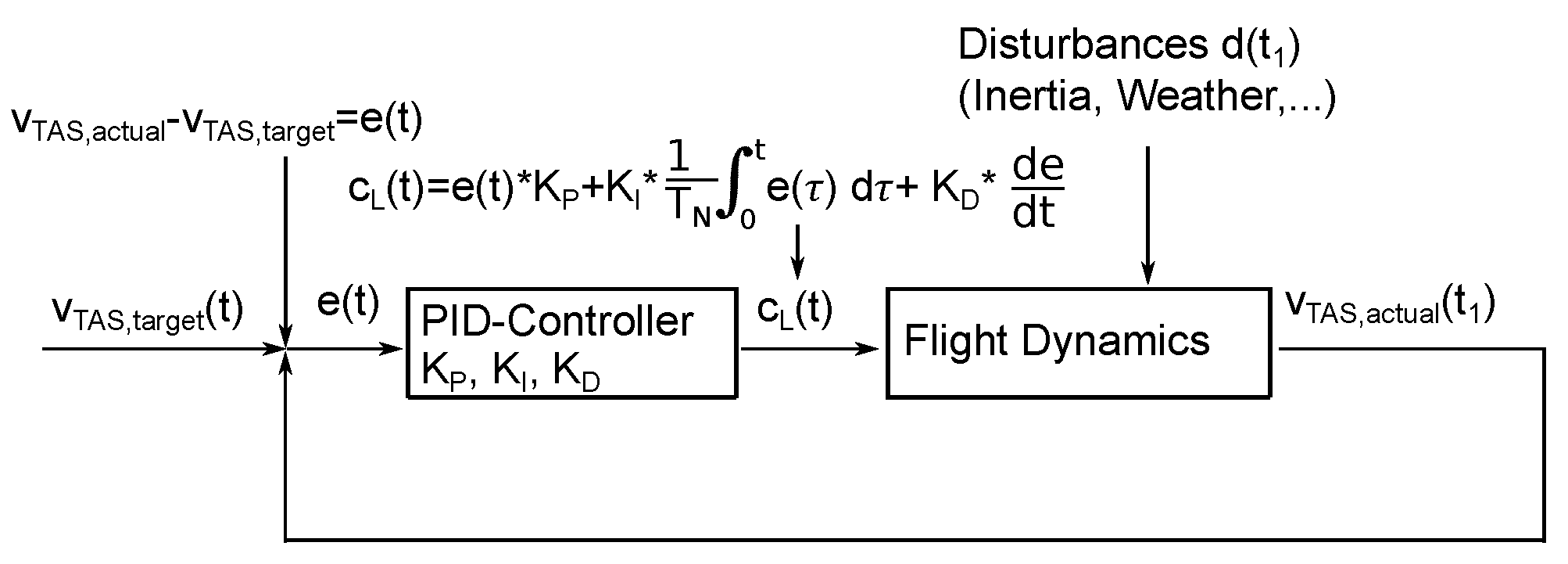
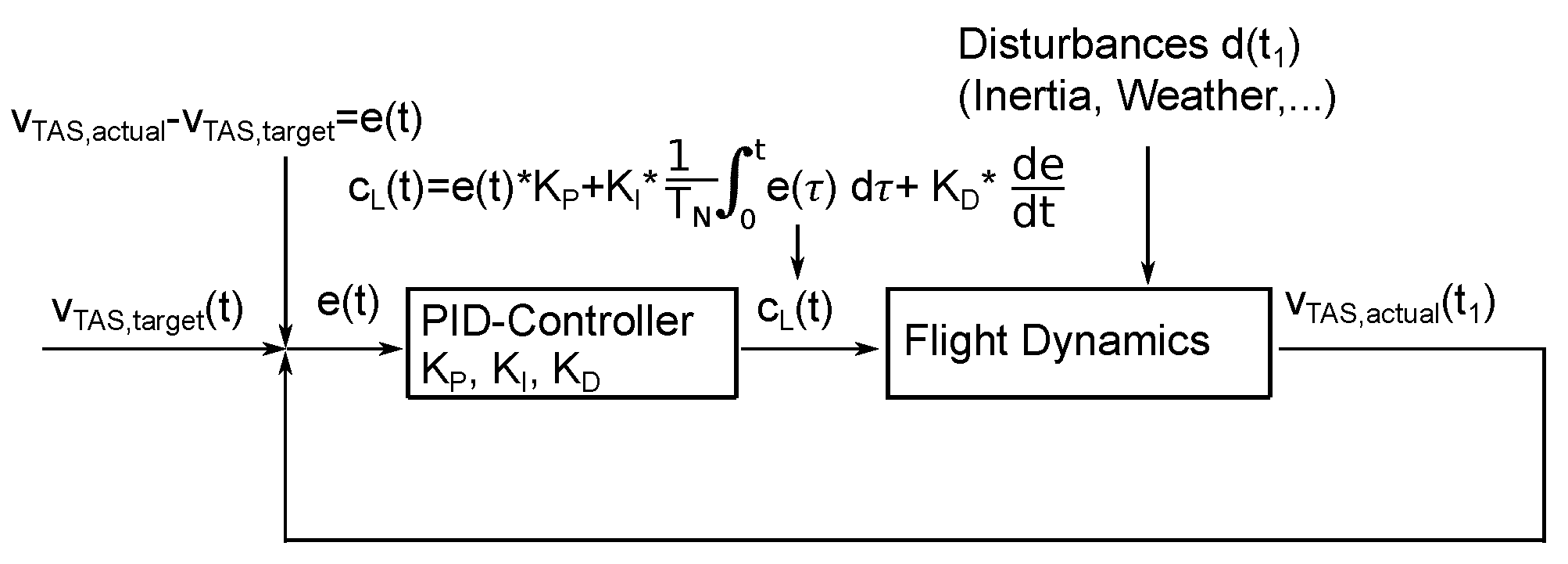
3.3. Vertical Trajectory Optimization in TOMATO
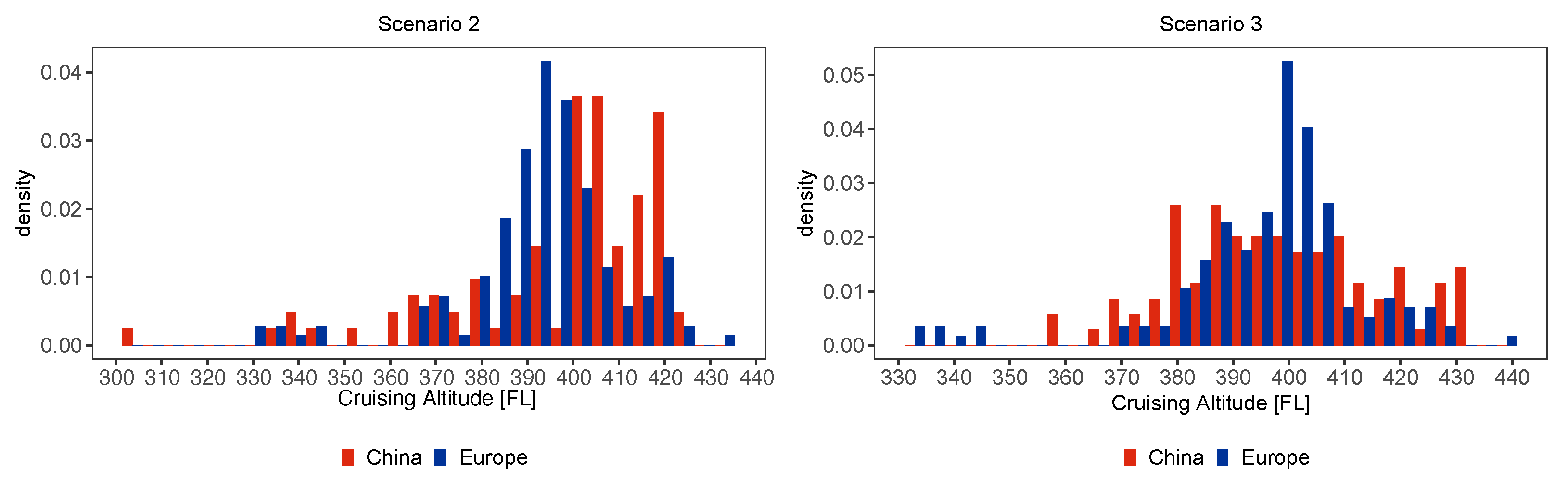
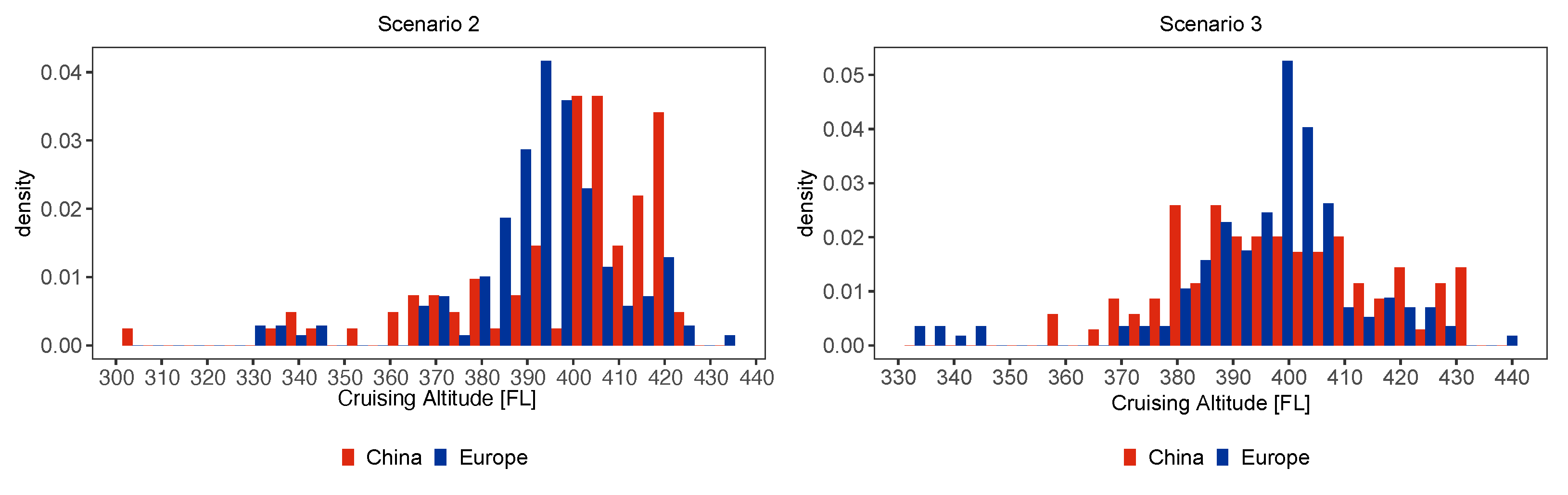
3.4. Aerodynamic Optimum Cruising Altitude (Scenario 2)
3.5. Weather-Optimum Cruising Altitude (Scenario 3)
3.6. Weather-Optimum Cruising Altitudes along Optimized Lateral Paths (Sceanrio 4)
4. Results
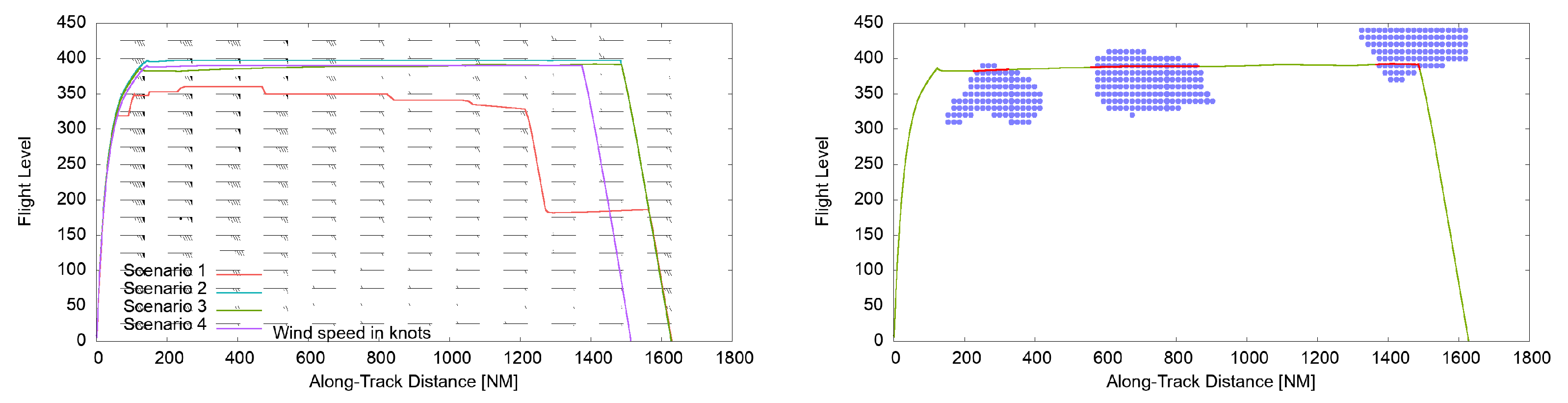
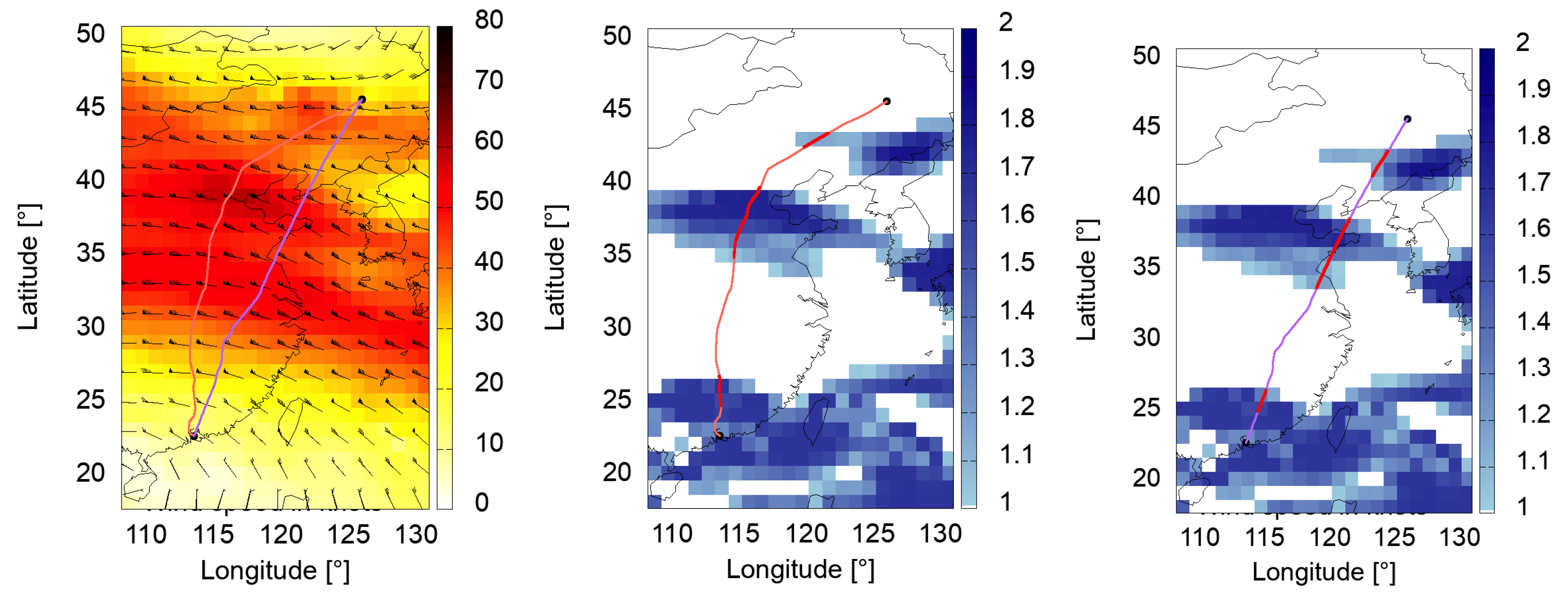
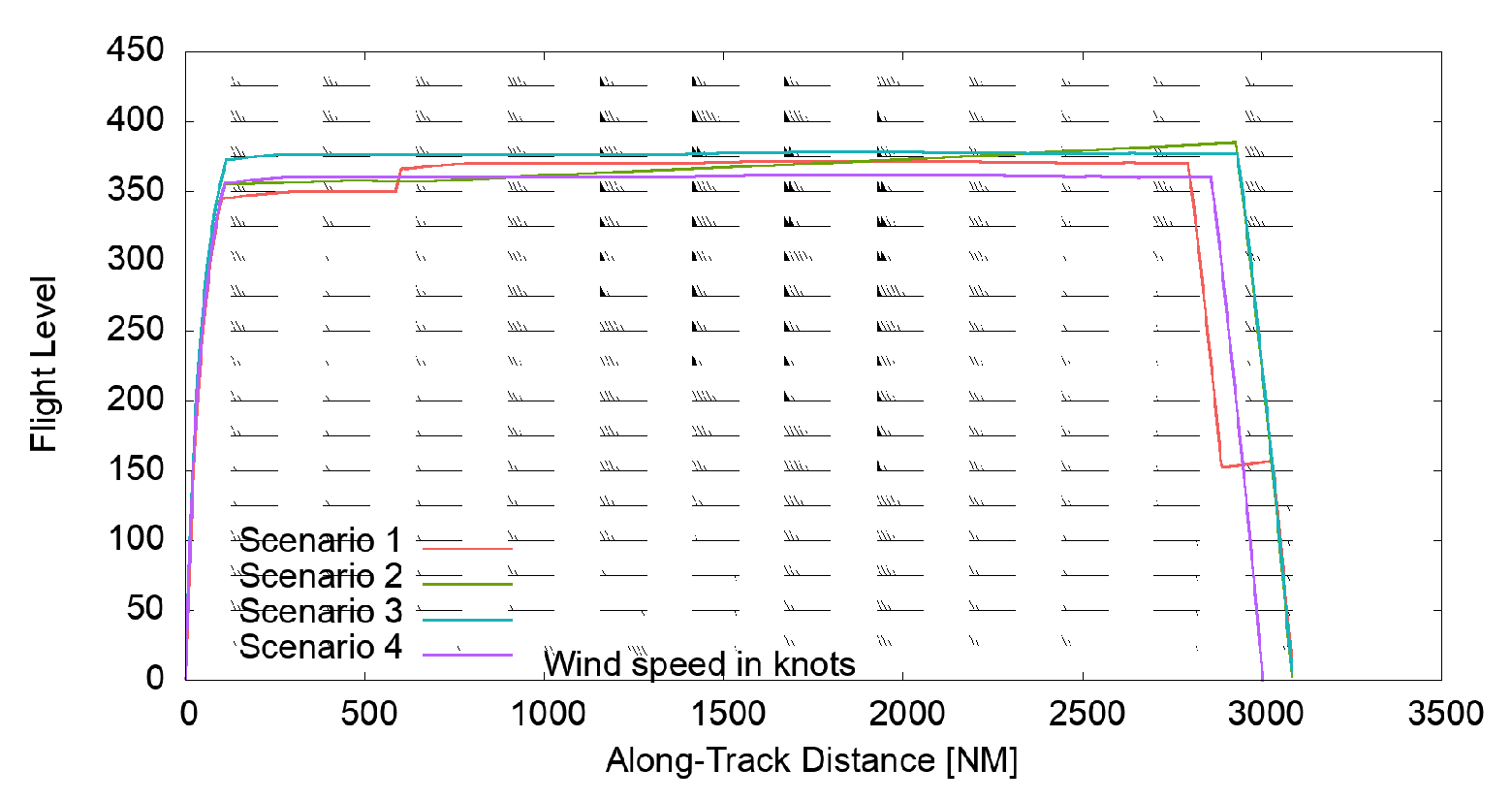
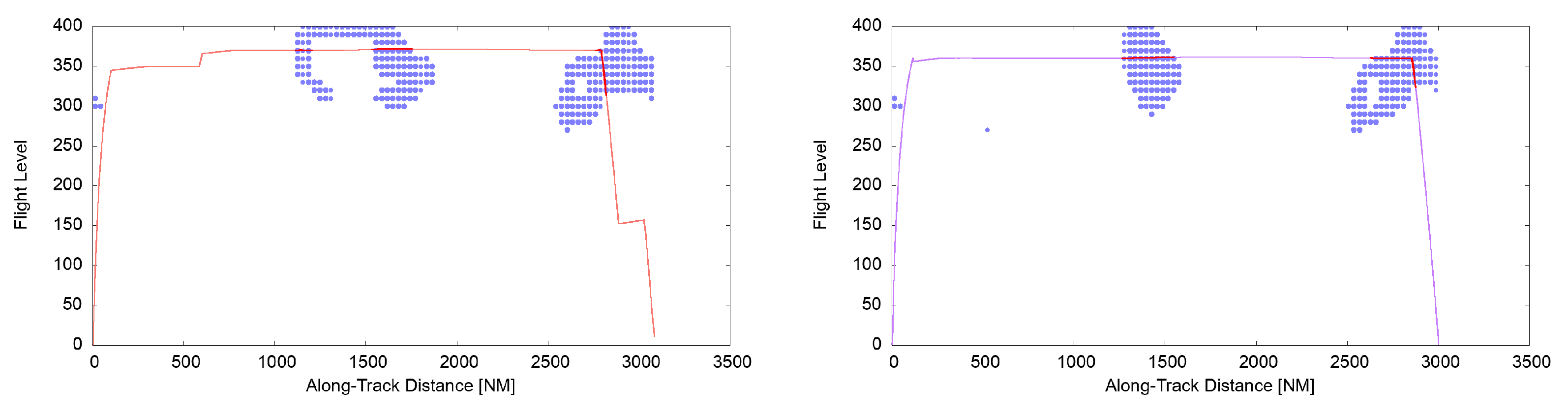
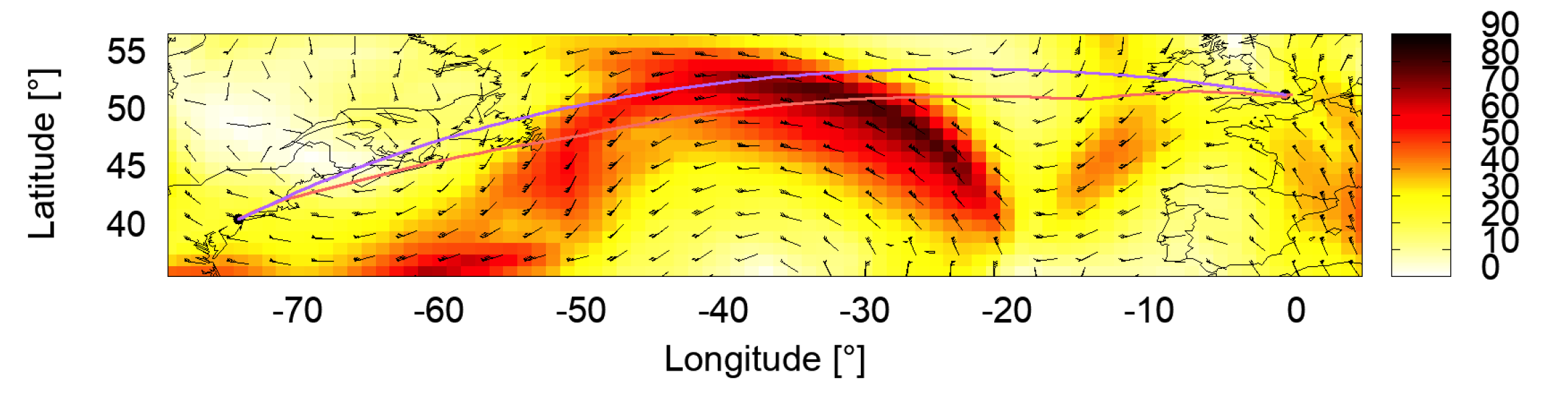
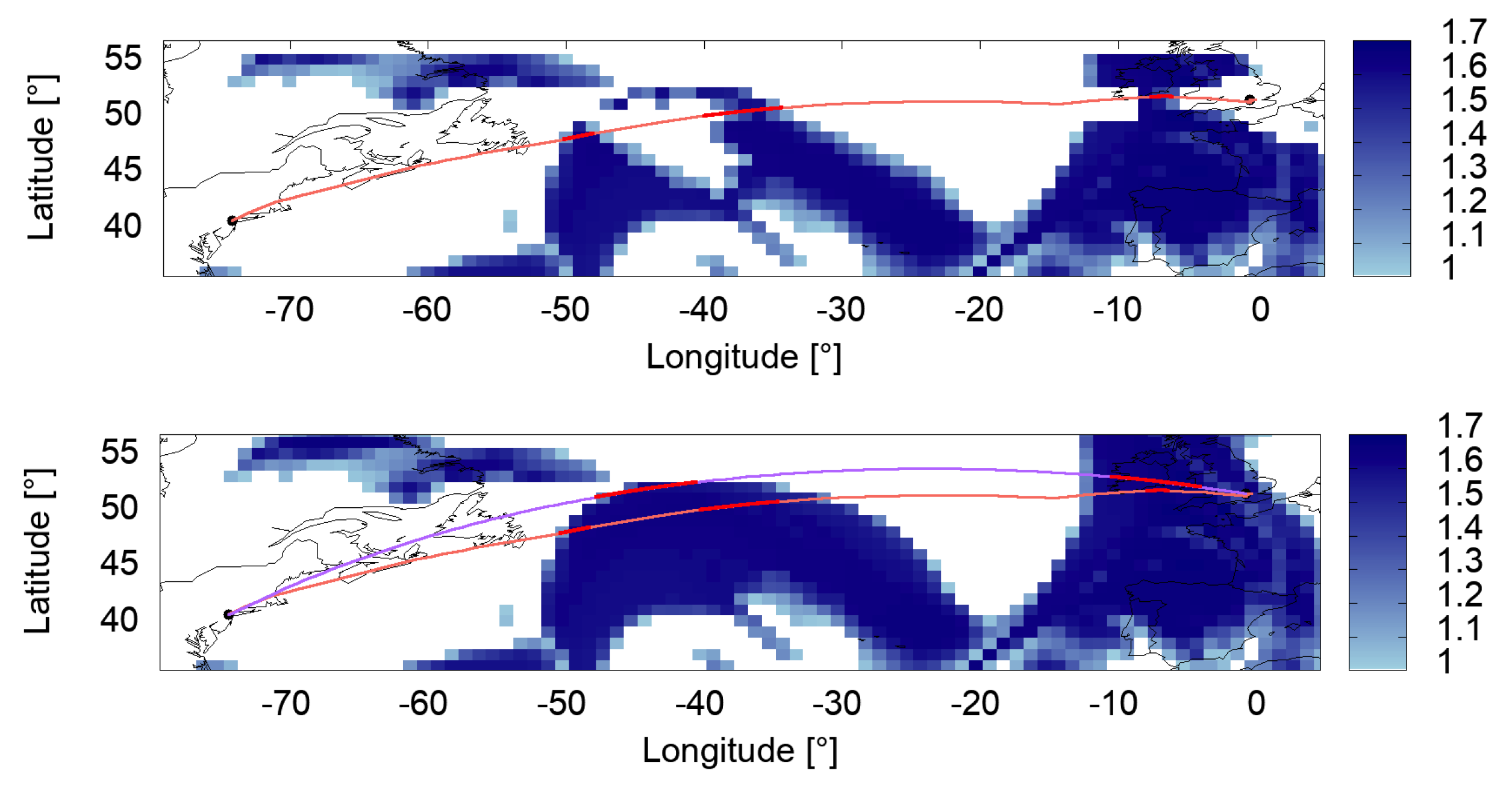
4.1. Analysis of Single Flights
4.2. Level-Flight Segments during Climb and Descent
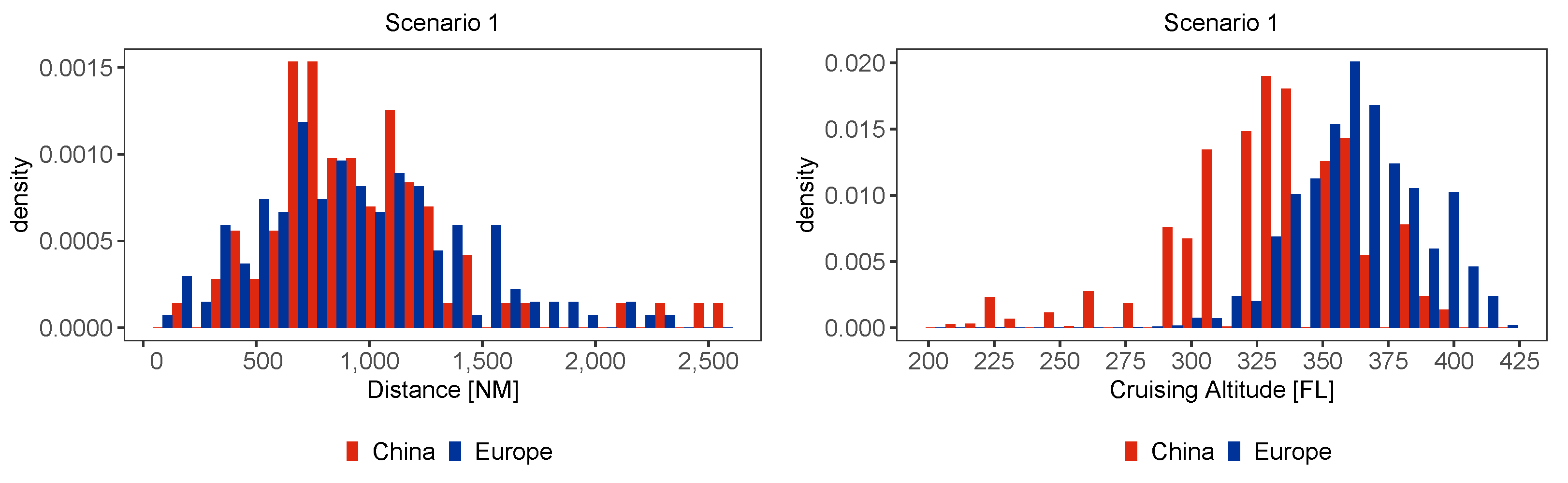
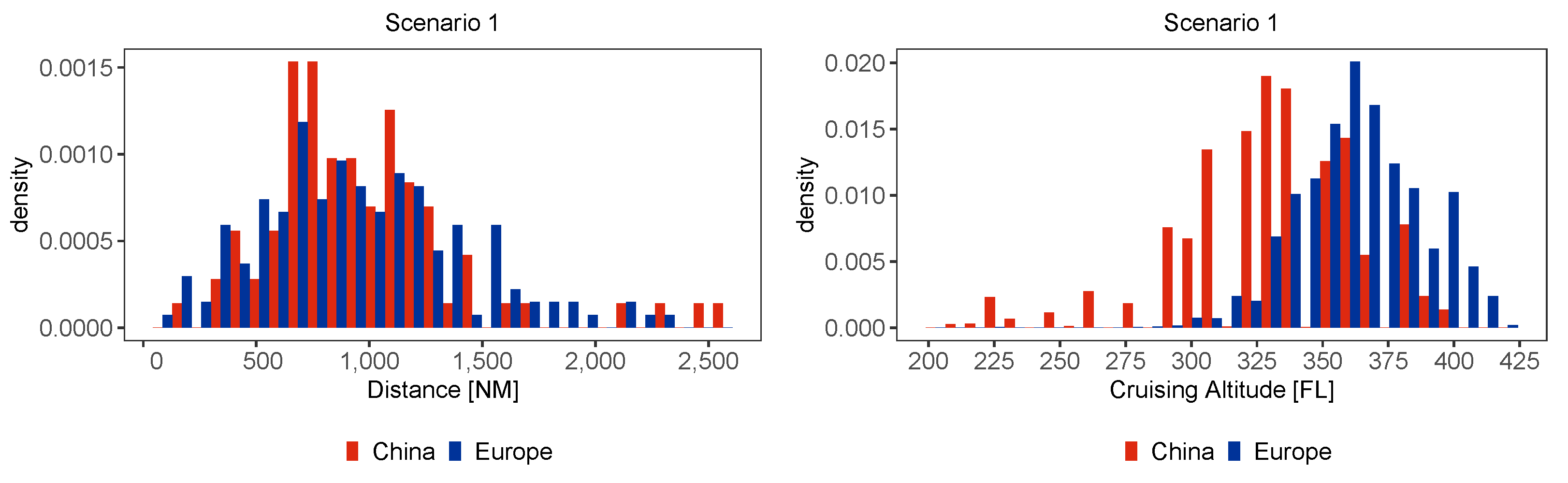
4.3. Typical Historic Cruising Altitudes
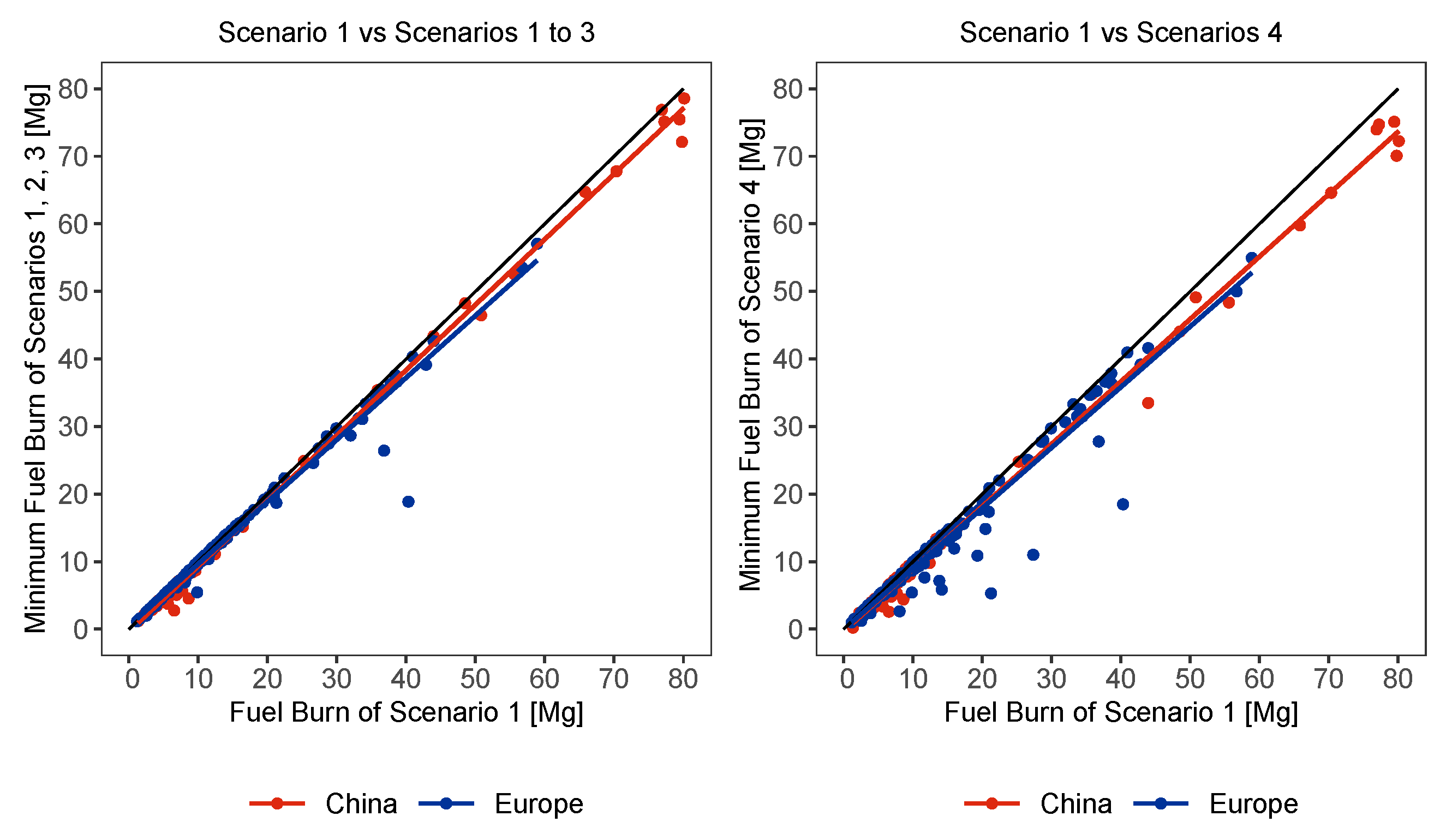
4.4. Important Optimization Target Function for Trajectories with Minimum Fuel Burn
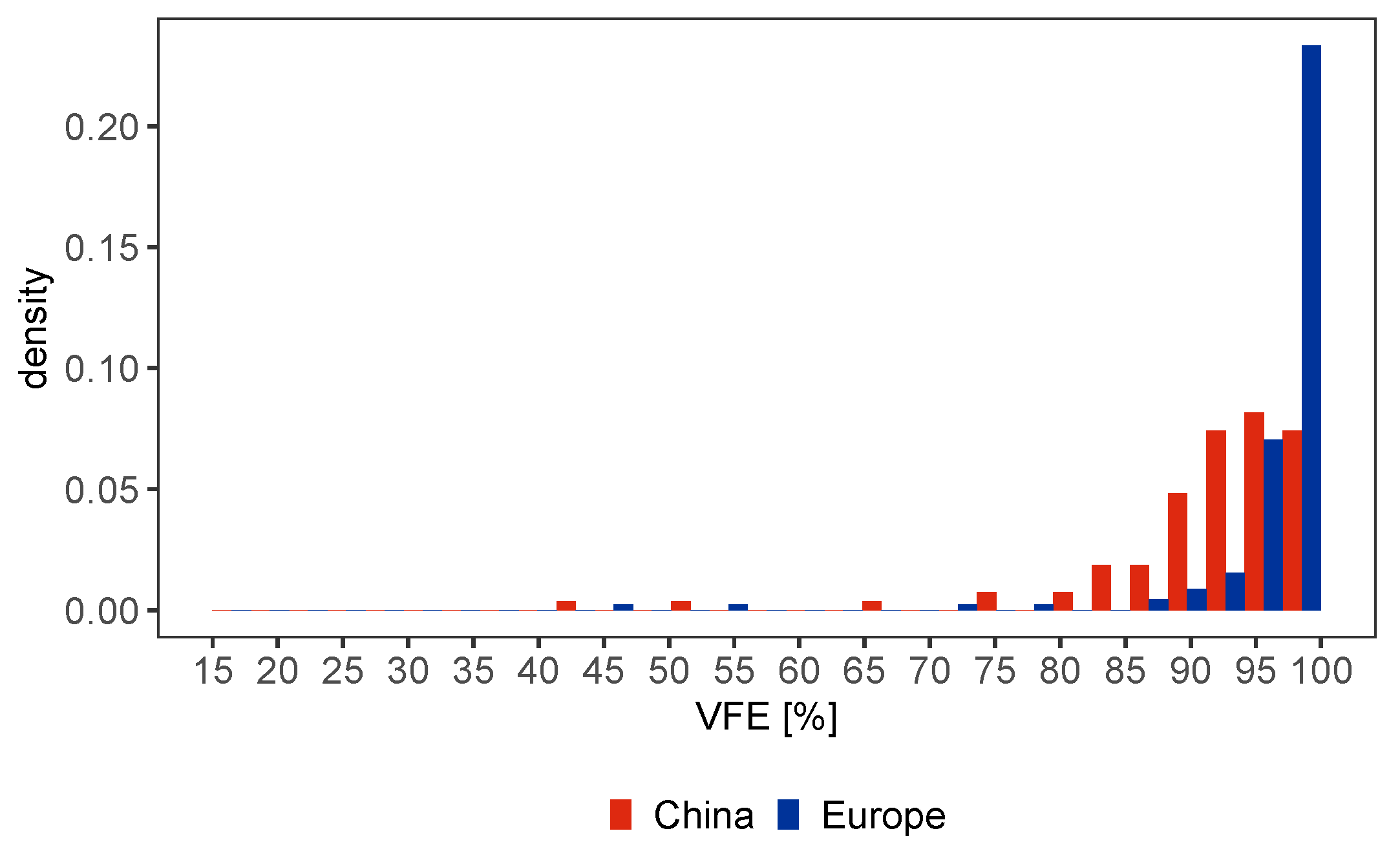
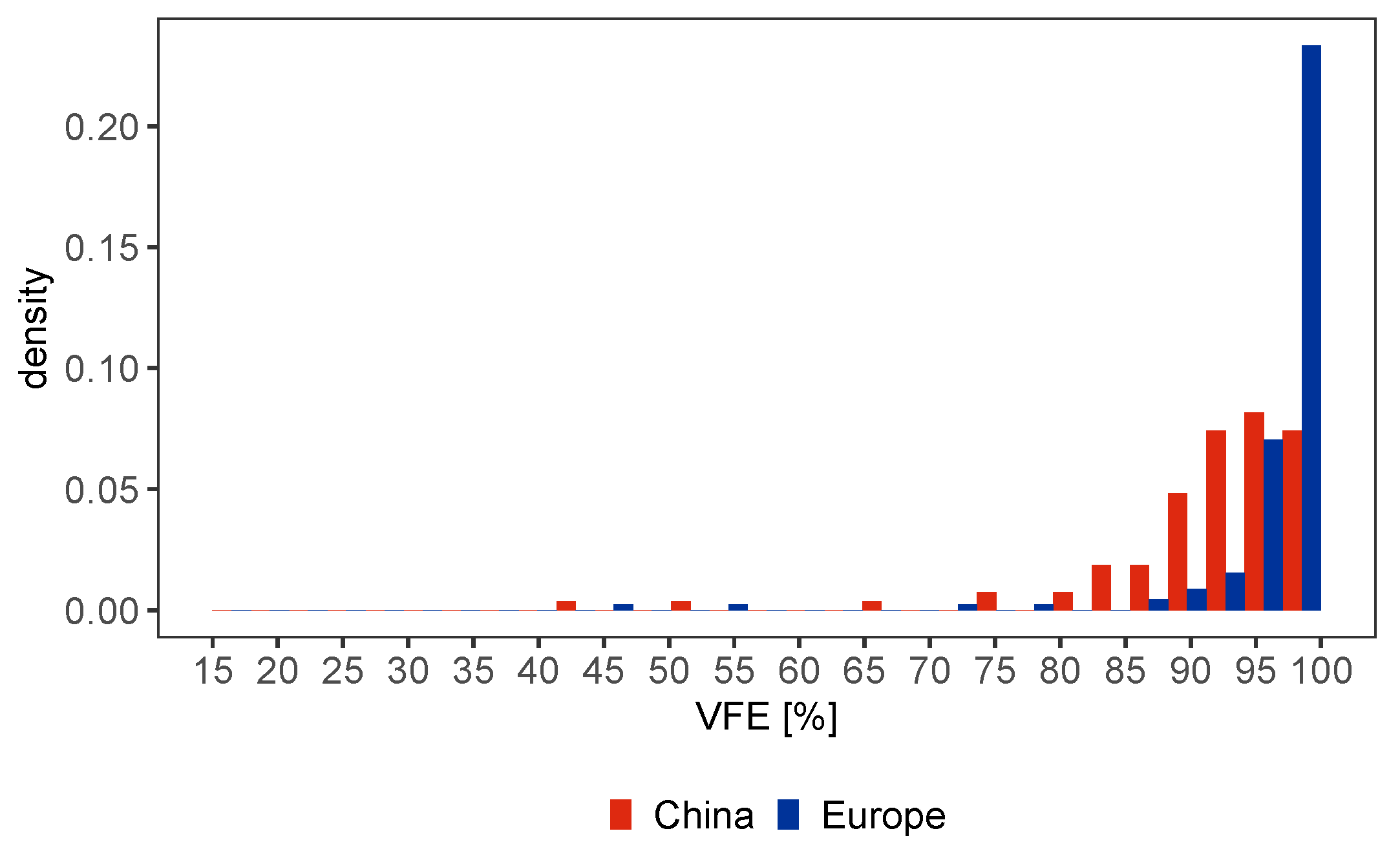
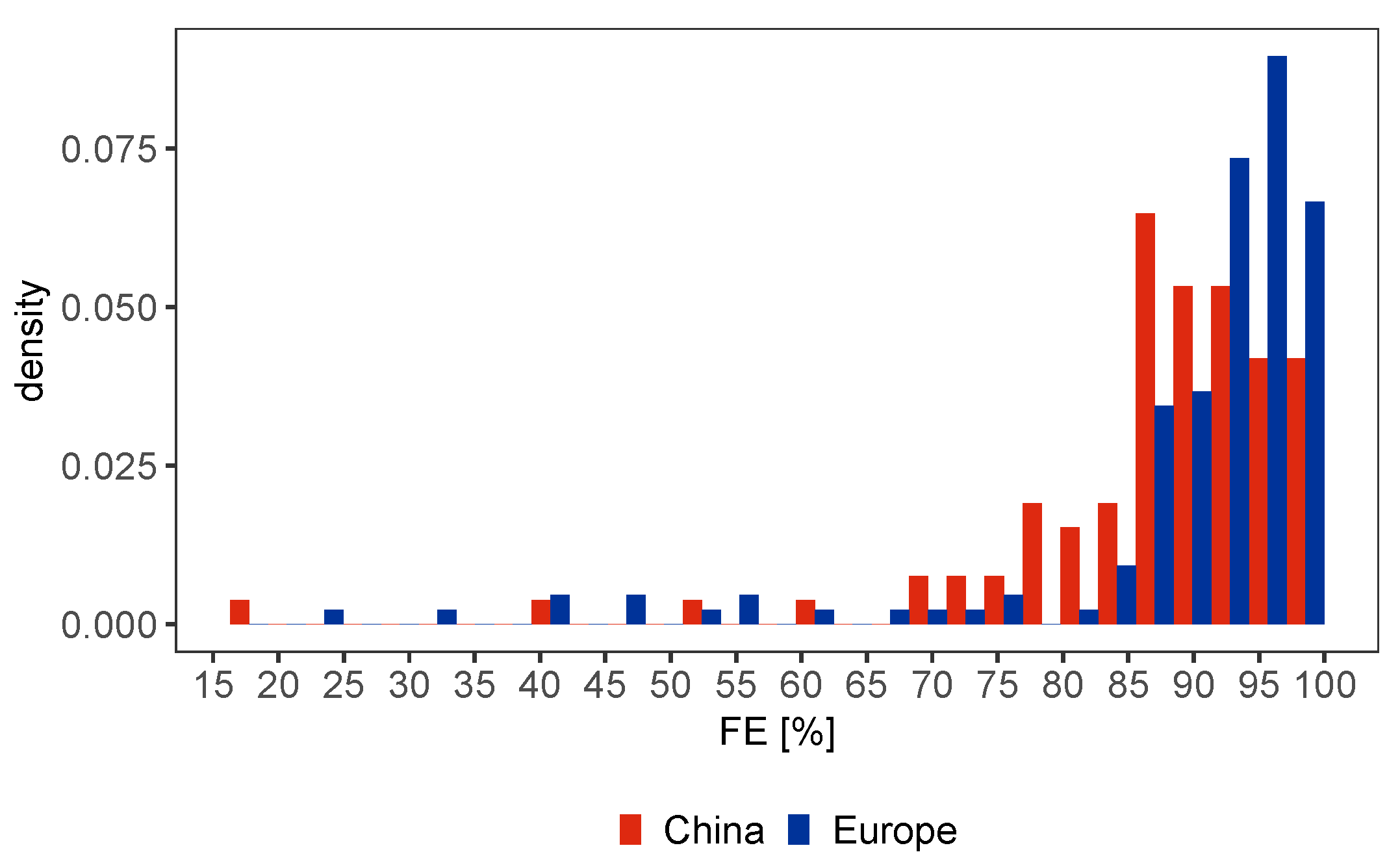
4.5. Vertical Flight Efficiency
4.6. Benefit of Vertical and Lateral Trajectory Optimization
5. Conclusions and Outlook
Author Contributions
Funding
Conflicts of Interest
References
- Civil Air Navigation Services Organisation. Implementing Air Traffic Flow Management and Collaborative Decision Making. Available online: https://canso.fra1.digitaloceanspaces.com/uploads/2020/02/Implementating-Air-Traffic-Fow-Management-and-Airport-Collaborative-Decision-Making.pdf (accessed on 5 September 2021).
- SESAR Joint Undertaking. In European ATM Master Plan, 2nd ed.; Publications Office of the European Union: Luxembourg, 2015.
- European Commission. Regulation (EU) No 965/2012. Off. J. Eur. Comm. 2012, 296, 1–148. [Google Scholar]
- International Civil Aviation Organization. Air Traffic Management. Doc. 4444 PANS-ATM. 2016. Available online: https://ops.group/blog/wp-content/uploads/2017/03/ICAO-Doc4444-Pans-Atm-16thEdition-2016-OPSGROUP.pdf (accessed on 2 September 2021).
- European Commission. In Flight Level Orientation Scheme—FLOS; Official Journal of the European Union: Brussels, Belgium, 2016.
- Whitley, A.; Park, K. China Air Traffic Congestion Worsened by Military Control. China’s Airlines Renew the Call for Airspace Reform, Bloomberg, 17 May 2013. Available online: https://www.bloomberg.com/news/articles/2013-05-16/china-air-traffic-congestion-worsened-by-military-control (accessed on 2 September 2021).
- European Defence Agency. The Military in the Single European Sky; Facts and Figures; European Defence Agency: Brussels, Belgium, 2018. [Google Scholar]
- Rosenow, J.; Chen, G.; Fricke, H.; Sun, X.; Wang, Y. Impact of Chinese and European Airspace Constraints on Trajectory Optimization. Aerospace 2021, 8, 338. [Google Scholar] [CrossRef]
- Rosenow, J.; Michling, P.; Schultz, M.; Schönberger, J. Evaluation of Strategies to Reduce the Cost Impacts of Flight Delays on Total Network Costs. Aerospace 2020, 7, 165. [Google Scholar] [CrossRef]
- EUROCONTROL, Performance Review Commission. Vertical Flight Efficiency. Technical Note, Final Report, Brussels, March 2008. Available online: https://www.eurocontrol.int/sites/default/files/2019-05/vertical-flight-efficiency-mar-2008.pdf (accessed on 2 September 2021).
- EUROCONTROL, Performance Review Unit. Analysis of Vertical Flight Efficiency During Climb and Descent. Technical Note, Final Report, Brussels, January 2017. Available online: https://ansperformance.eu/references/library/vertical-flight-efficiency-during-climb-and-descent_consultation.pdf (accessed on 4 September 2021).
- EUROCONTROL, Performance Review Unit. Analysis of En-Route Vertical Flight Efficiency. Technical Note, Final Report, Brussels, January 2017. Available online: https://ansperformance.eu/references/library/en-route-vertical-flight-efficiency_consultation.pdf (accessed on 3 September 2021).
- Erzberger, H.; Barman, J.; Mclean, J. Optimum Flight Profiles for Short Haul Missions; American Institute of Aeronautics and Astronautics: Boston, MA, USA, 1975. [Google Scholar] [CrossRef]
- Civil Air Navigation Services Organisation. Methodologies for Calculating Delays/Improvement Opportunity Pools by Phase of Flight. 2013. Available online: https://www.icao.int/NACC/Documents/Meetings/2018/ASBU18/OD-15-Methodologies%20for%20Calculating%20Delays.pdf (accessed on 1 September 2021).
- Peeters, S.; Koelman, H.; Koelle, R.; Galaviz, R.; Gulding, J.; Meekma, M. Towards a common analysis of vertical flight efficiency. In Proceedings of the 2016 Integrated Communications Navigation and Surveillance (ICNS), Herndon, VA, USA, 19–21 April 2016; p. 7A2–1. [Google Scholar] [CrossRef]
- Pasutto, P.; Zeghal, K.; Brain, D. Initial analysis of vertical flight efficiency in cruise for European city pairs. In Proceedings of the AIAA Aviation 2021 Forum, Virtual Event, 2–6 August 2021. [Google Scholar] [CrossRef]
- Fricke, H.; Vogel, M.; Standfuß, T. Reducing Europe’s Aviation Impact on Climate Change using enriched Air traffic Forecasts and improved efficiency benchmarks. In Proceedings of the FABEC Research Workshop “Climate Change and Role of Air Traffic Control”, Vilnius, Lithuania, 22–23 September 2021. [Google Scholar]
- Eurocontrol Performance Review Unit. Performance Indicator-Horizontal Flight Efficiency. Available online: https://ansperformance.eu/methodology/horizontal-flight-efficiency-pi/ (accessed on 5 September 2021).
- Beulze, B.; Dancila, B.; Botez, R.; Bottollier-Lemallaz, S.; Herda, S. Presentation of three methods results comparison for Vertical Navigation VNAV trajectory optimization for the Flight Management System FMS. In Proceedings of the 15th AIAA Aviation Technology, Integration, and Operations Conference, Dallas, TX, USA, 22–26 June 2015. [Google Scholar] [CrossRef]
- Lissys Ltd. Available online: https://arc.aiaa.org/doi/book/10.2514/MATIO15 (accessed on 3 September 2021).
- Lufthansa Systems. Flight Operations Solutions. Available online: https://www.lhsystems.de/solutions/flight-operations-solutions (accessed on 2 September 2021).
- Erzberger, H.; Mclean, J.; Barman, J. Fixed-Range Optimum Trajectories for Short-Haul Aircraft. J. Aircr. 1976, 13, 748–754. [Google Scholar] [CrossRef] [Green Version]
- Wu, S.F.; Guo, S.F. Optimum flight trajectory guidance based on total energy control of aircraft. J. Guid. Control Dyn. 1994, 17, 291–296. [Google Scholar] [CrossRef]
- Tarelho Szenczuk, J.; Murça, M.; Souza, W.; Eller, R. Causal Analysis of Vertical Flight Inefficiency During Descents. In Proceedings of the SITRAER XVIII—Air Transportation Symposium, Brasilia, Brazil, 22–24 October 2019. [Google Scholar]
- Kamo, S.; Rosenow, J.; Fricke, H. CDO Sensitivity Analysis for Robust Trajectory Planning under Uncertain Weather Prediction. In Proceedings of the 39th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 11–15 October 2020. [Google Scholar]
- Kamo, S.; Rosenow, J.; Fricke, H.; Soler, M. Robust CDO Trajectory Planning under Uncertainties in Weather Prediction. In Proceedings of the 14th USA/Europe Air Traffic Management Research and Development Seminar, virtual Event, 20–24 September 2021. [Google Scholar]
- Dancila, R.I.; Botez, R. Vertical flight profile optimization for a cruise segment with RTA constraints. Aeronaut. J. 2019, 123, 970–992. [Google Scholar] [CrossRef]
- Bailey, L.; Romani de Oliveira, I.; Fregnani, J.A. Vertical Flight Path Optimization. U.S. Patent 16/149,727, 2 October 2018. [Google Scholar]
- Dalmau, R.; Prats, X. How much fuel and time can be saved in a perfect flight trajectory? Continuous cruise climbs vs. In conventional operations. In Proceedings of the 6th International Conference on Research in Air Transportation (ICRAT), Istanbul, Turkey, 20–26 May 2014. [Google Scholar]
- Rosenow, J.; Förster, S.; Fricke, H. Continuous Climb Operations with minimum fuel burn. In Proceedings of the Sixth SESAR Innovation Days, Delft, The Netherlands, 8–10 November 2016; Available online: https://www.sesarju.eu/newsroom/events/6th-sesar-innovation-days (accessed on 5 October 2017).
- Singh, J.; Goyal, G.; Ali, F.; Shah, B.; Pack, S. Estimating Fuel-Efficient Air Plane Trajectories Using Machine Learning. Comput. Mater. Contin. 2022, 70, 6189–6204. [Google Scholar] [CrossRef]
- Zeh, T.; Rosenow, J.; Alligier, R.; Fricke, H. Prediction of the Propagation of Trajectory Uncertainty for Climbing Aircraft. In Proceedings of the 2020 AIAA/IEEE 39th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 11–15 October 2020; pp. 1–9. [Google Scholar] [CrossRef]
- Harada, A.; Takeichi, N.; Oka, K. An optimal trajectory-based trajectory prediction method for automated traffic flow management. In Proceedings of the American Institute of Aeronautics and Astronautics Science and Technology 2019 Forum, San Diego, CA, USA, 7–11 January 2019; pp. 1360–1373. [Google Scholar]
- Bousson, K.; Machado, P. 4D Flight Trajectory Optimization Based on Pseudospectral Methods. World Acad. Sci. Eng. Technol. 2010, 70, 551–557. [Google Scholar]
- de Leege, A.; Van Paassen, M.M.; Mulder, M. A Machine Learning Approach to Trajectory Prediction. In Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Boston, MA, USA, 19–22 August 2013. [Google Scholar] [CrossRef]
- Yepes, J.; Hwang, I.; Rotea, M. An Intent-Based Trajectory Prediction Algorithm for Air Traffic Control. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, San Francisco, CA, USA, 15–18 August 2005; Volume 1. [Google Scholar] [CrossRef]
- Lymperopoulos, I.; Lygeros, J.; Lecchini, A. Model Based Aircraft Trajectory Prediction During Takeoff. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Keystone, CO, USA, 21–24 August 2006. [Google Scholar] [CrossRef]
- Garcia, M.; Dolan, J.; Haber, B.; Hoag, A.; Diekelman, D. A Compilation of Measured ADS-B Performance Characteristics from Aiereon’s Orbit Test Program. In Proceedings of the 2018 Enhanced Solutions for Aircraft and Vehicle Surveillance (ESAVS) Applications Conference, Berlin, Germany, 18–19 October 2018. [Google Scholar]
- Rohde, R. Germany Trade and Invest—Gesellschaft für Außenwirtschaft und Standortmarketing mbH. Available online: https://www.gtai.de/gtai-e/trade/branchen/branchenbericht/china/innerchinesischer-flugverkehr-und-tourismus-erholen-sich–569326 (accessed on 2 September 2021).
- Sun, J.; Ellerbroek, J.; Hoekstra, J. Flight extraction and phase identification for large automatic dependent surveillance–broadcast datasets. J. Aerosp. Inf. Syst. 2017, 14, 566–572. [Google Scholar] [CrossRef] [Green Version]
- Sun, J.; Hoekstra, J.M.; Ellerbroek, J. OpenAP: An Open-Source Aircraft Performance Model for Air Transportation Studies and Simulations. Aerospace 2020, 7, 104. [Google Scholar] [CrossRef]
- International Air Transport Association. WATS World Air Transport Statistics 2021. Available online: https://www.iata.org/contentassets/a686ff624550453e8bf0c9b3f7f0ab26/wats-2021-mediakit.pdf (accessed on 3 September 2021).
- CAPA Centre of Aviation. China’s Domestic Aviation Recovers; but Not International. 2021. Available online: https://centreforaviation.com/analysis/reports/capa-live-chinas-domestic-aviation-recovers-but-not-international-557636 (accessed on 2 September 2021).
- Civil Aviation Administration of China. China. 2020. Electronic Aeronautic Information Publication. Available online: http://www.eaipchina.cn/ (accessed on 5 September 2021).
- Bergman, J. This Is Why China’s Airports Are a Nightmare. Available online: https://www.bbc.com/worklife/article/20160420-this-is-why-chinas-airports-are-a-nightmare (accessed on 2 September 2021).
- General Administration of Civil Aviation of China. Rules Governing Operation of Foreign Civil Aircraft. 23 Februray 1979. Available online: http://www.asianlii.org/cn/legis/cen/laws/rgoofca480/#1 (accessed on 3 September 2021).
- Civil Aviation Administration of China. Civil Aviation Law of the People’s Republic of China; Standing Committee of the National People’s Congress: Beijing, China, 2007.
- CEIC: Global Economic Data, Indicators, Charts & Forecasts. China Air: Passenger Load Factor. Available online: https://www.ceicdata.com/en/china/air-passenger-load-factor (accessed on 1 September 2021).
- Global Times, Economy. More Chinese Cities Are Mapping out Cargo Business. Available online: https://www.globaltimes.cn/page/202105/1224034.shtml (accessed on 4 September 2021).
- Spichtinger, P.; Gierens, K.M.; Read, W. Initial Information to EU, Other Member States and Other Interested Parties on the Establishment of FABEC. (EC) 550/2004 Service Provision Regulation as Amended by (EC) 1070/2009, Art. 9a 3. and 9a 4. 2003. Available online: https://www.fabec.eu/images/user-pics/pdf-downloads/ssc36_fabec_information_paper_v2_0.pdf (accessed on 5 June 2021).
- Eurocontrol. Free Route Airspace (FRA) Implementation Projections—2021. Available online: https://www.eurocontrol.int/publication/free-route-airspace-fra-implementation-projection-charts (accessed on 2 September 2021).
- Effective Cost-Recovery System. Available online: http://www.eurocontrol.int/services/monthly-adjusted-unit-rates (accessed on 1 September 2021).
- Förster, S.; Rosenow, J.; Lindner, M.; Fricke, H. A Toolchain for Optimizing Trajectories under Real Weather Conditions and Realistic Flight Performance. Greener Aviation, Brussels. 2016. Available online: https://www.researchgate.net/publication/311256981_A_toolchain_for_optimizing_trajectories_under_real_weather_conditions_and_realistic_flight_performance (accessed on 7 July 2018).
- Rosenow, J.; Fricke, H.; Schultz, M. Air Traffic Simulation with 4D Multi-Criteria Optimized trajectories. In Proceedings of the 2017 Winter Simulation Conference, Las Vegas, NV, USA, 3–6 December 2017. [Google Scholar]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. SSC4 1968, 2, 100–107. [Google Scholar] [CrossRef]
- Schumann, U.; Konopka, P.; Baumann, R.; Busen, R.; Gerz, T.; Schlager, D.; Schulte, P.; Volkert, H. Estimate of diffusion parameters of aircraft exhaust plumes near the tropopause from nitric oxide and turbulence measurements. J. Geophys. Res. 1995, 100, 14147–14162. [Google Scholar] [CrossRef] [Green Version]
- Rosenow, J. Optical Properties of Condensation Trails. Ph.D. Thesis, Technische Universität Dresden, Dresden, Germany, 2016. [Google Scholar]
- Rosenow, J.; Fricke, H. Individual Condensation Trails in Aircraft Trajectory Optimization. Sustainability 2019, 11, 6082. [Google Scholar] [CrossRef] [Green Version]
- Scheiderer, J. Angewandte Flugleistung; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Berdowski, Z.; van den Broek-Serlé, F.; Jetten, J.; Kawabata, Y.; Versteegh, J.S.a.R. Survey on Standard Weights of Passengers and Baggages. EASA 2008.C.06/30800/R20090095/30800000/FBR/RLO. 2009. Available online: https://www.easa.europa.eu/sites/default/files/dfu/Weight%20Survey%20R20090095%20Final.pdf (accessed on 4 September 2020).
- AIRBUS S.A.S. A320/A320NEO Aircraft Characteristics, Airport and Maintenance Planning. Technical Report, AIRBUS S.A.S Customer Services Technical Data Support and Service, May 2014. Available online: https://www.airbus.com/sites/g/files/jlcbta136/files/2021-11/Airbus-Commercial-Aircraft-AC-A320.pdf (accessed on 30 September 2020).
- Rosenow, J.; Fricke, H. Impact of Multi-critica Optimized Trajectories on European Airline and Network Efficiency. In Proceedings of the Air Transport Research Society World Conference, Antwerp, Belgium, 5–8 July 2017. [Google Scholar]
- Rosenow, J.; Fricke, H.; Luchkova, T.; Schultz, M. Impact of Optimized Trajectories on Air Traffic Flow Management. Aeronaut. J. 2018. submitted. [Google Scholar]
- ICAO. Continuous Climb Operation (CCO) Manual. Doc 9993 AN/495 2013. Available online: https://applications.icao.int/tools/ATMiKIT/story_content/external_files/10260008117raft_en_CCO.pdf (accessed on 30 October 2018).
- McConnachie, D.; Bonnefoy, P.; Belle, A. Inestigating benefits from continuous climb operating concepts in the national airspace system. In Proceedings of the Eleventh USA/Europe Air Traffic Management Research and Development Seminar (ATM2015), Lisbon, Portugal, 23–26 June 2015. [Google Scholar]
- Anderson, J.D. Introduction to Flight; McGraw-Hill: New York, NY, USA, 1989. [Google Scholar]
- ICAO. Continuous Descent Operations (CDO) Manual—Doc 9931/AN/476. Montreal 2010, 1. Available online: https://applications.icao.int/tools/ATMiKIT/story_content/external_files/102600063919931_en.pdf (accessed on 14 September 2021).
- Fricke, H.; Seiß, C.; Herrmann, R. A Fuel and Energy Benchmark Analysis of Continuous Descent Operations. Air Traffic Control. Q. 2015, 23, 83–108. [Google Scholar] [CrossRef]
- Kaiser, M.; Schultz, M.; Fricke, H. Automated 4D descent path optimization using the Enhanced trajectory Prediction Model (EJPM). In Proceedings of the International Conference on Research in Air Transportation (ICRAT), Berkeley, CA, USA, 22–25 May 2012. [Google Scholar]
- Rosenow, J.; Förster, S.; Lindner, M.; Fricke, H. Multicriteria-Optimized Trajectories Impacting Today’s Air Traffic Density, Efficiency, and Environmental Compatibility. J. Air Transp. 2018, 27, 8–15. [Google Scholar] [CrossRef]
- Rosenow, J.; Strunck, D.; Fricke, H. Trajectory Optimization in Daily Operations. In Proceedings of the International Conference on Research in Air Transportation (ICRAT), Barcelona, Spain, 26–29 June 2018. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
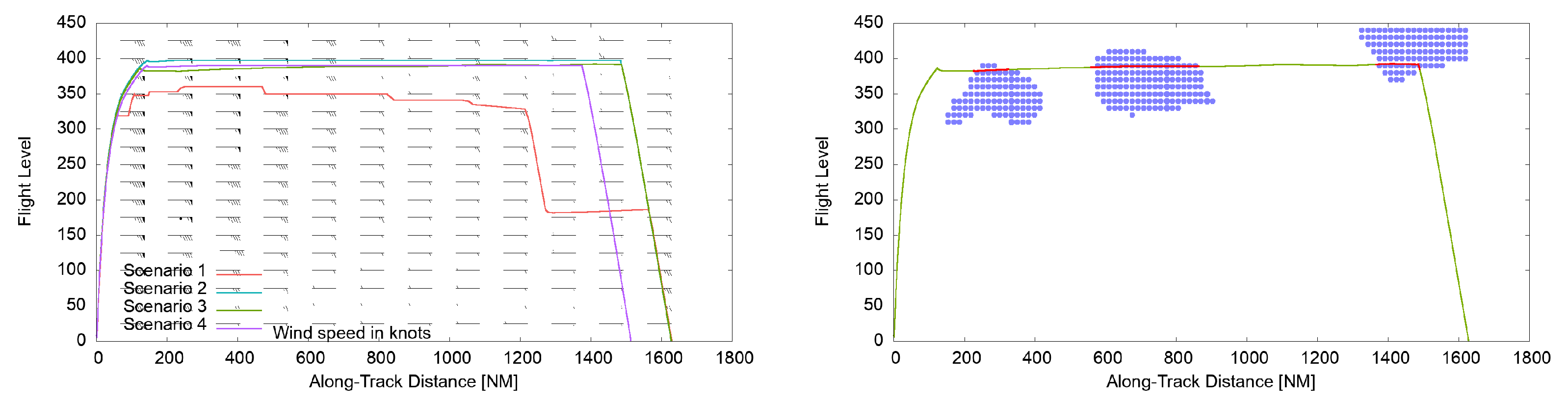
| Scenario | Optimization Target |
|---|---|
| Scenario 1 | historic vertical and lateral profile |
| Scenario 2 | aerodynamically optimized vertical profile (see Section 3.4) and historic lateral profile |
| Scenario 3 | weather-optimized vertical profile (see Section 3.5) and historic lateral profile |
| Scenario 4 | both weather-optimized vertical profile and lateral profile (see Section 3.6) |
| Kernel | Altitude z [ft] | Ground Speed [kt] | Rate of Climb RoC [ft min] |
|---|---|---|---|
| Ground | |||
| Climb/Descent | |||
| Cruise | |||
| Level flight |
| Kernel | ||||
|---|---|---|---|---|
| Ground | 1 | 0 | 1 | 0 |
| Climb/Descent | 0.06 | 0.01 | 1 | 0.01 |
| Cruise | 1 | 1 | 1 | 1 |
| Level flight | 0.06 | 0.01 | 1 | 0.01 |
| China | Europe | |
|---|---|---|
| Coordinates: longitude [°] | [101–125] | [–25] |
| Coordinates: latitude [°] | [20–41] | [35–55] |
| Area size [km] | ||
| Inhabitants | ||
| Mean # of movements per year | ||
| Total # of trajectories | 12,721 | 18,264 |
| # of analyzed trajectories | 99 | 160 |
| Fuel | Flight | Ground | Air | Total | Contrail | Contrail | EPI | ATC | VFE | |
|---|---|---|---|---|---|---|---|---|---|---|
| Flight/Scenario | Burn | Time | Distance | Distance | Costs | Time | Costs | Charges | ||
| [kg] | [h] | [km] | [km] | [€] | [min] | [€] | [€] | [€] | [%] | |
| CSN6273 | ||||||||||
| 1 | 9595 | 4.70 | 3013 | 3299 | 35,306 | 85 | 914 | 1674 | 3933 | 90.34 |
| 2 | 8777 | 4.33 | 3013 | 3258 | 32,435 | 74 | 826 | 1528 | 3930 | 98.75 |
| 3 | 8668 | 4.31 | 3013 | 3246 | 32,092 | 55 | 592 | 1285 | 3929 | 100 |
| 4 | 8080 | 3.96 | 2966 | 2966 | 30,039 | 77 | 822 | 1469 | 3673 | - |
| UAL940 | ||||||||||
| 1 | 28,542 | 6.72 | 5711 | 5225 | 100,552 | 41 | 445 | 2950 | 6698 | 95.01 |
| 2 | 27,728 | 6.56 | 5711 | 5213 | 99,779 | 56 | 600 | 3068 | 6698 | 97.80 |
| 3 | 27,118 | 6.61 | 5711 | 5210 | 99,028 | 55 | 588 | 2896 | 6698 | 100 |
| 4 | 26,968 | 6.52 | 5561 | 5161 | 97,750 | 63 | 675 | 3115 | 6212 | - |
| # of Flights with | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| # of level segments | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 12 |
| China | 19 | 27 | 11 | 9 | 8 | 6 | 11 | 2 | 3 | 1 |
| Europe | 81 | 66 | 6 | 1 | 2 | 3 | 1 | 0 | 0 | 0 |
| Distance flown in level [NM] | 0–50 | 50–100 | 100–150 | 150–200 | 200–250 | 250–300 | 300–350 | |||
| China | 235 | 16 | 1 | 2 | 0 | 0 | 0 | |||
| Europe | 81 | 18 | 8 | 0 | 2 | 0 | 1 | |||
| Time spent in level [min] | 0–10 | 10–20 | 20–30 | 30–40 | 40–50 | 50–60 | 60–70 | |||
| China | 244 | 7 | 3 0 | 0 | 0 | 0 | ||||
| Europe | 76 | 21 | 9 | 2 | 1 | 1 |
| Altitude Bin [FL] | 200 | 220 | 240 | 260 | 280 | 300 | 320 | 340 | 360 | 380 | 400 | 420 | 440 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Scenario 1: China | |||||||||||||
| # of flights | 1 | 4 | 5 | 4 | 11 | 19 | 25 | 13 | 7 | 0 | 0 | 0 | 0 |
| frequency | 0.001 | 0.002 | 0.003 | 0.002 | 0.006 | 0.011 | 0.014 | 0.007 | 0.004 | 0 | 0 | 0 | 0 |
| Scenario 1: Europe | |||||||||||||
| # of flights | 0 | 0 | 0 | 0 | 2 | 4 | 19 | 50 | 50 | 25 | 6 | 0 | 0 |
| frequency | 0 | 0 | 0 | 0 | 0.001 | 0.001 | 0.006 | 0.016 | 0.016 | 0.008 | 0.002 | 0 | 0 |
| Scenario 2: China | |||||||||||||
| # of flights | 0 | 0 | 0 | 0 | 0 | 1 | 3 | 2 | 11 | 14 | 51 | 10 | 0 |
| frequency | 0 | 0 | 0 | 0 | 0 | 0.001 | 0.002 | 0.001 | 0.006 | 0.008 | 0.028 | 0.005 | 0 |
| Scenario 2: Europe | |||||||||||||
| # of flights | 0 | 0 | 0 | 0 | 0 | 0 | 5 | 2 | 16 | 89 | 36 | 7 | 0 |
| frequency | 0 | 0 | 0 | 0 | 0 | 0 | 0.002 | 0.001 | 0.005 | 0.029 | 0.012 | 0.002 | 0 |
| Scenario 3: China | |||||||||||||
| # of flights | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 11 | 40 | 27 | 15 | 0 |
| frequency | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.001 | 0.006 | 0.021 | 0.014 | 0.008 | 0 |
| Scenario 3: Europe | |||||||||||||
| # of flights | 0 | 0 | 0 | 0 | 0 | 0 | 5 | 2 | 11 | 72 | 55 | 10 | 0 |
| frequency | 0 | 0 | 0 | 0 | 0 | 0 | 0.002 | 0.001 | 0.004 | 0.023 | 0.018 | 0.003 | 0 |
| Scenario 1 | Scenario 2 | Scenario 3 | Scenario 4 | |
|---|---|---|---|---|
| China | 0 | 2 | 11 | 79 |
| Europe | 0 | 4 | 12 | 143 |
| VFE [%] | China | Europe |
|---|---|---|
| mean | 91.62 | 96.61 |
| median | 93.69 | 98.32 |
| sd | 8.87 | 6.37 |
| FE [%] | China | Europe |
|---|---|---|
| mean | 87.32 | 89.84 |
| median | 89.33 | 93.84 |
| sd | 12.64 | 13.20 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rosenow, J.; Chen, G.; Fricke, H.; Wang, Y. Factors Impacting Chinese and European Vertical Fight Efficiency. Aerospace 2022, 9, 76. https://doi.org/10.3390/aerospace9020076
Rosenow J, Chen G, Fricke H, Wang Y. Factors Impacting Chinese and European Vertical Fight Efficiency. Aerospace. 2022; 9(2):76. https://doi.org/10.3390/aerospace9020076
Chicago/Turabian StyleRosenow, Judith, Gong Chen, Hartmut Fricke, and Yanjun Wang. 2022. "Factors Impacting Chinese and European Vertical Fight Efficiency" Aerospace 9, no. 2: 76. https://doi.org/10.3390/aerospace9020076
APA StyleRosenow, J., Chen, G., Fricke, H., & Wang, Y. (2022). Factors Impacting Chinese and European Vertical Fight Efficiency. Aerospace, 9(2), 76. https://doi.org/10.3390/aerospace9020076