
An Adaptive Framework for Optimization and Prediction of Air Traffic Management (Sub-)Systems with Machine Learning



Abstract
:1. Introduction
1.1. Status Quo
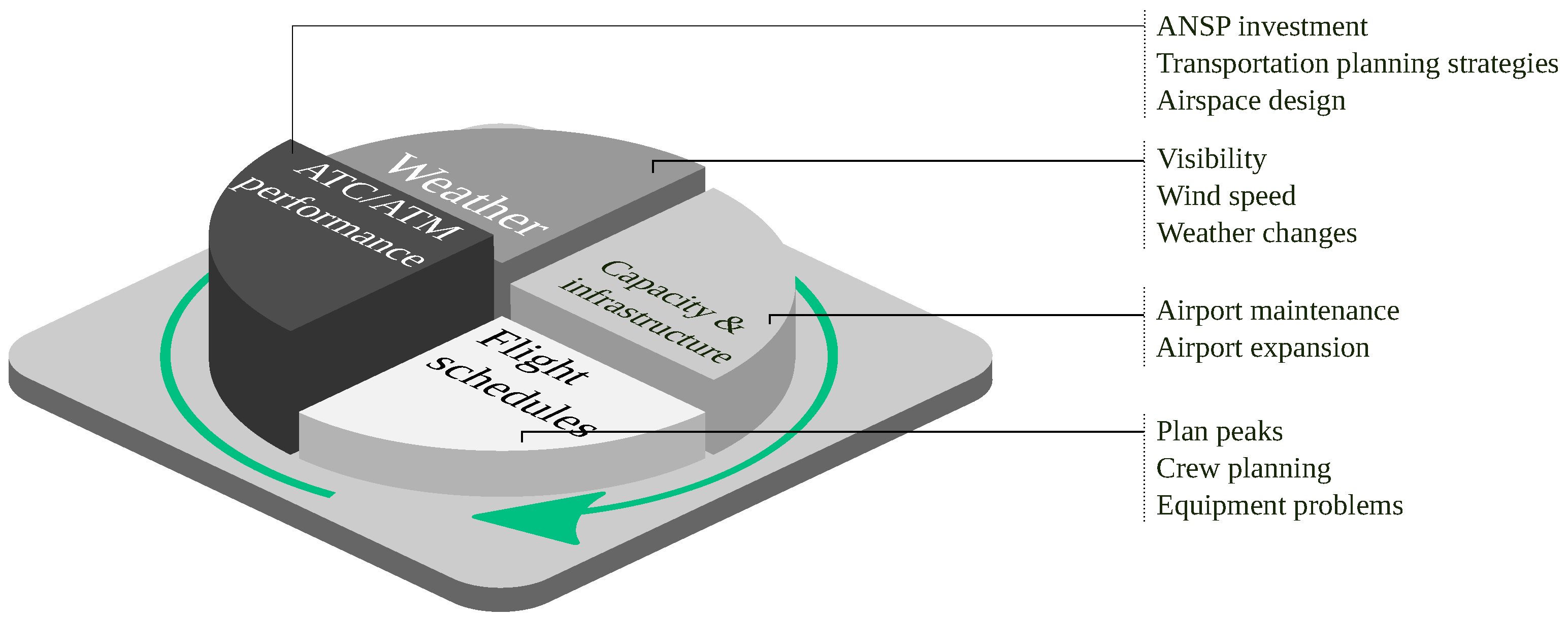
1.1.1. Interdependencies—The Reason for Using Artificial Neural Networks (ANN) in Air Traffic Management (ATM)
- Topic areas have evolved into different performance-based approaches, resulting in different terminologies;
- Inadequate coordination between policy making, planning, research/development/ validation, economic management, and operations management;
- Inadequate coordination among stakeholders creates a fragmented aviation system;
- Inadequate coordination at the local, regional, and global levels results in less than ideal interoperability;
- A fragmented approach from an operational perspective results in less than ideal flight efficiency and airport operations efficiency.
1.1.2. Former Research
1.2. Scope & Structure of the Document
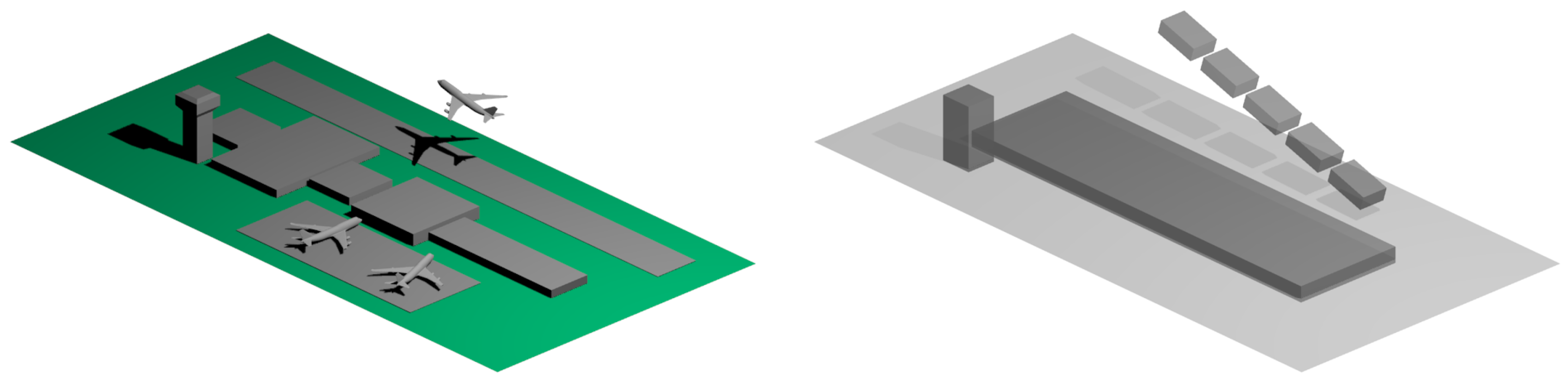
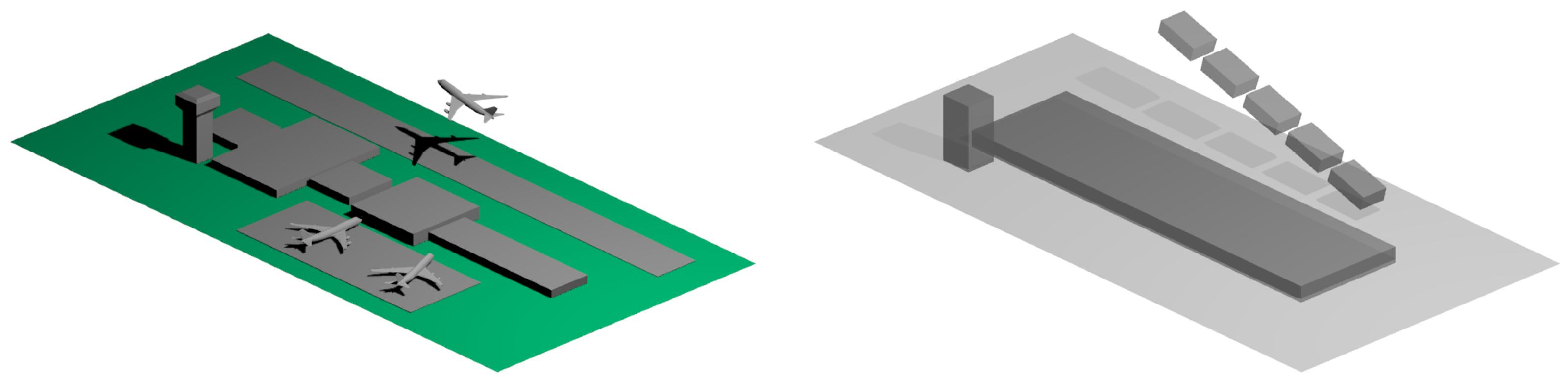
2. Virtualization of ATM (Sub-)Systems
- Agent-based: complex systems consist of individual parts that interact with each other (e.g., aircraft (AC), ground vehicles);
- Nonlinearity: minimal differences in initial conditions often lead to very different results, e.g., flight cancellations and long delays (butterfly effect). The cause-effect relationships of the system components are generally nonlinear;
- Emergence: emergent properties cannot be explained from the isolated analysis of the behavior of individual system components, but in their interaction;
- Interaction (interdependence): The interactions between the parts of the system are local; their effects usually global and thus affect the entire system assessment;
- Open system: complex systems are open systems (contact with their environment, e.g., weather);
- Paths: complex systems show path dependency: their temporal behavior depends not only on the current state, but also on the system’s previous history.
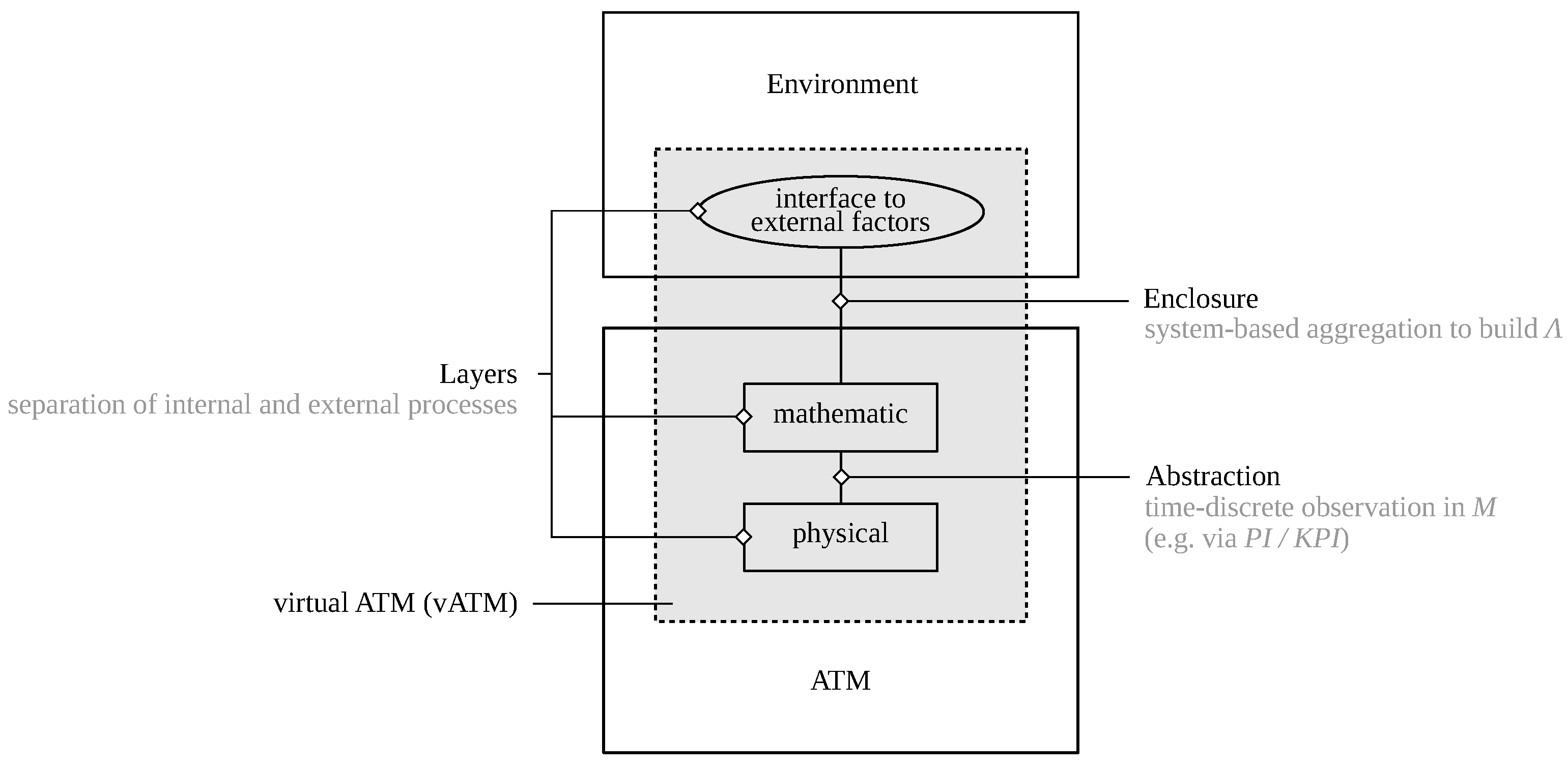
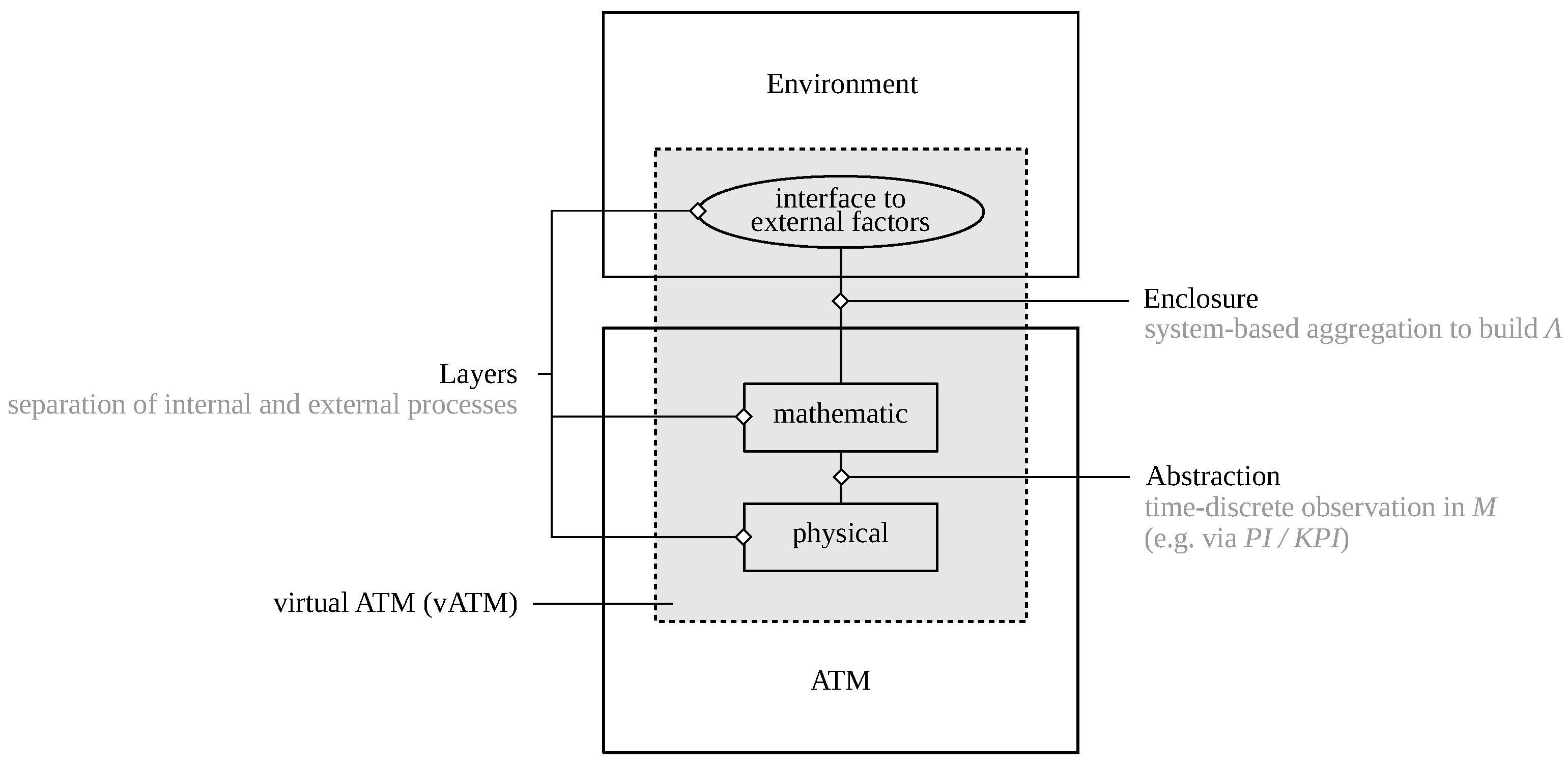
2.1. The Virtual ATM System
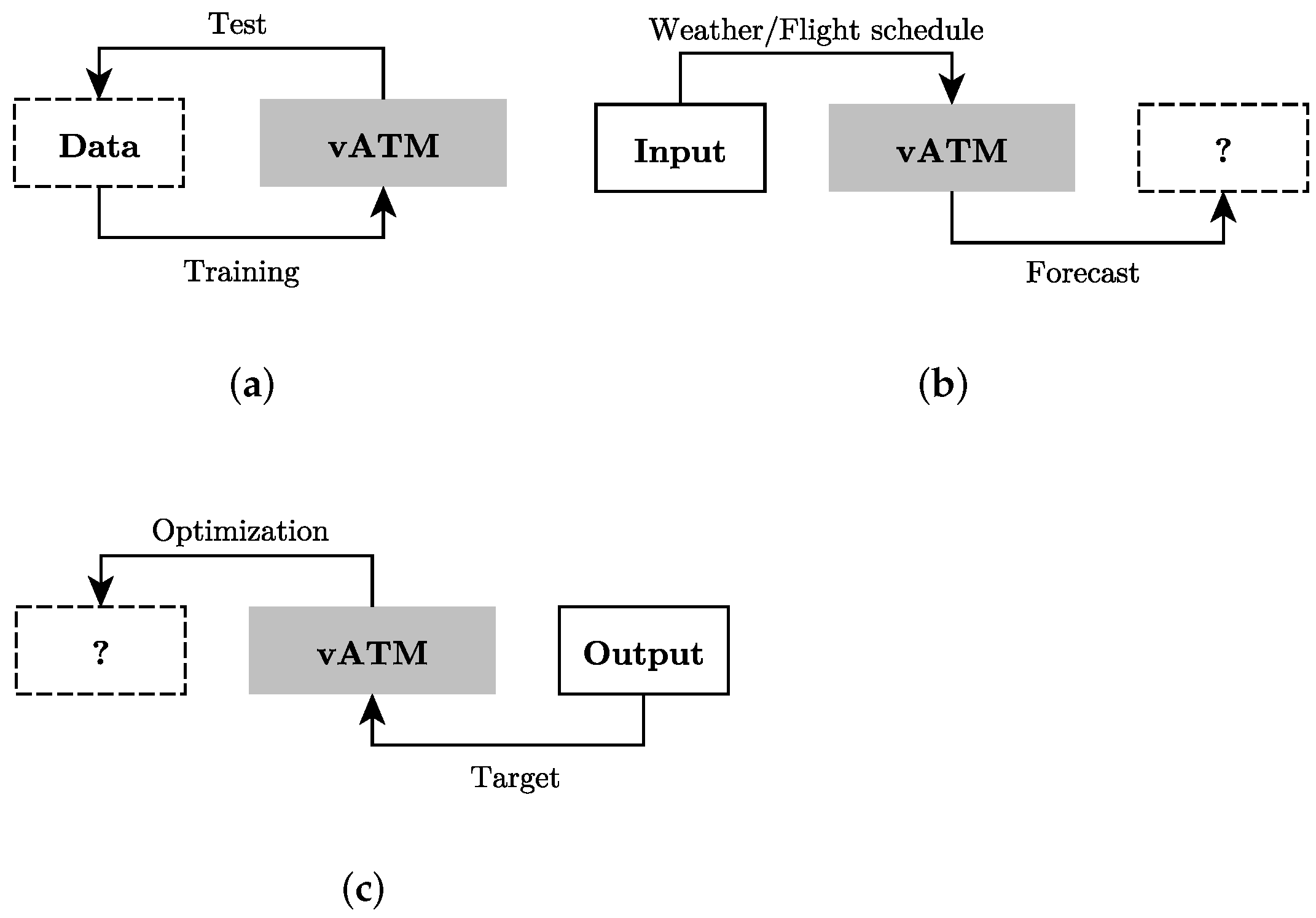
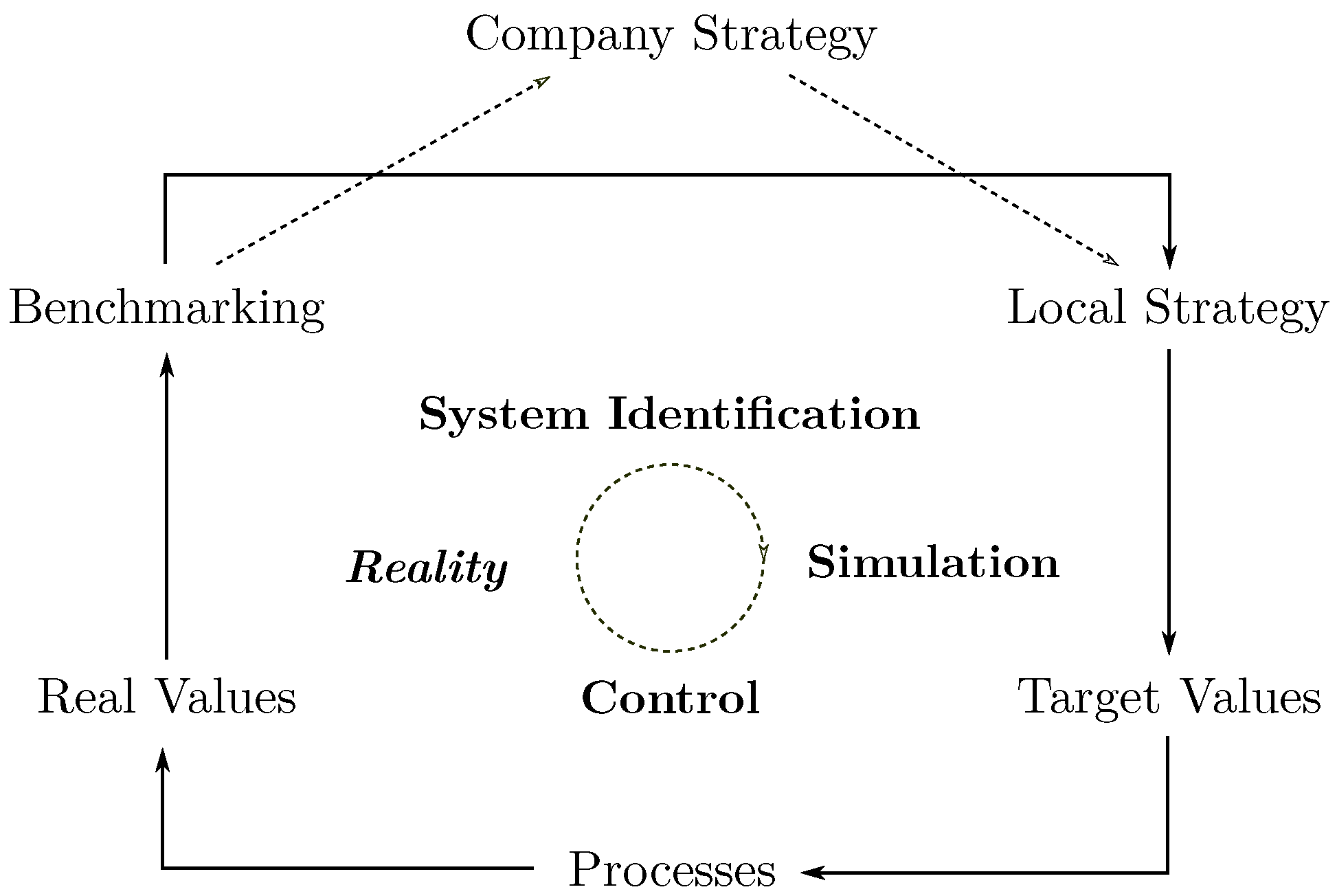
2.2. System Identification, Simulation, and Control
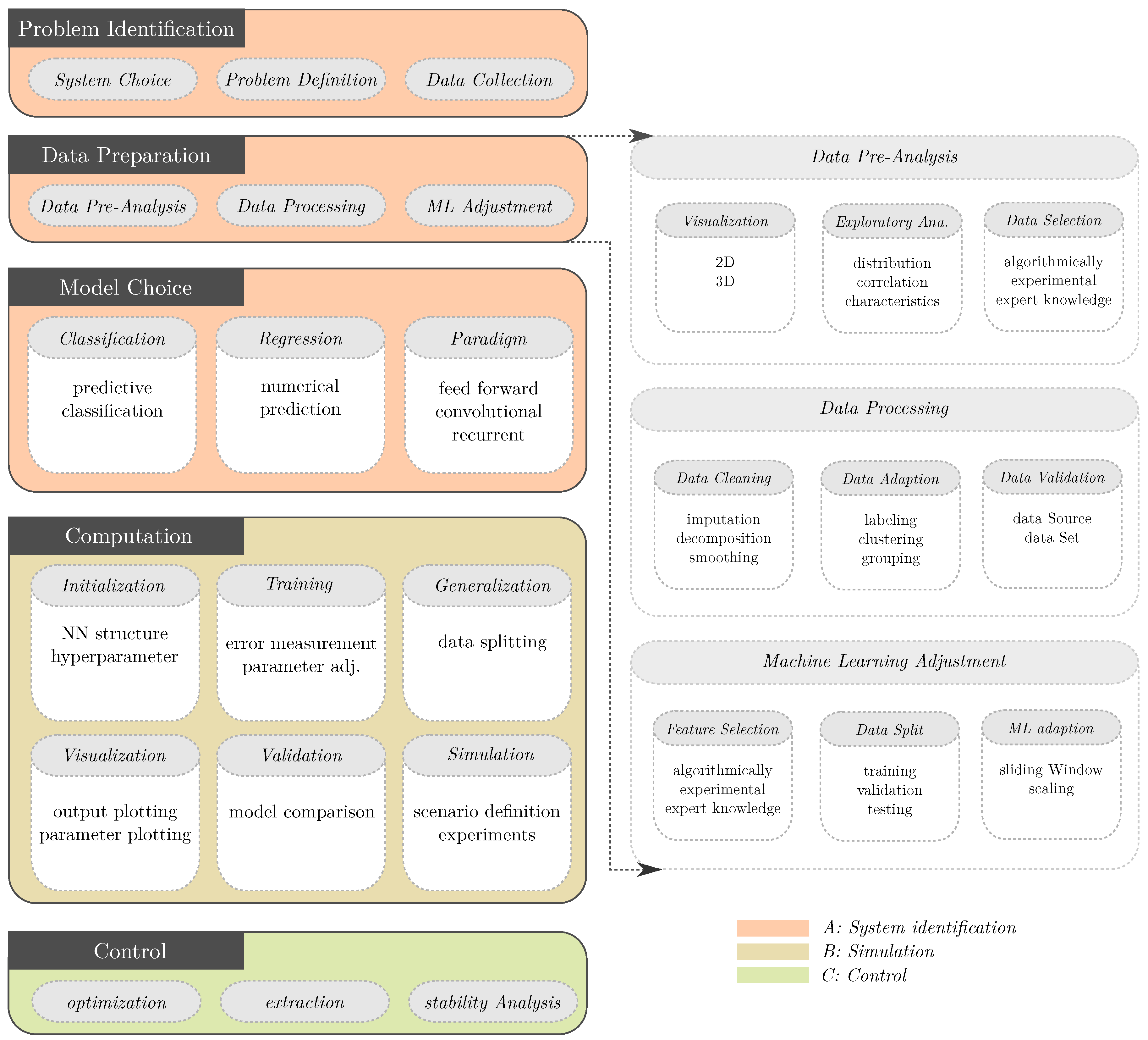
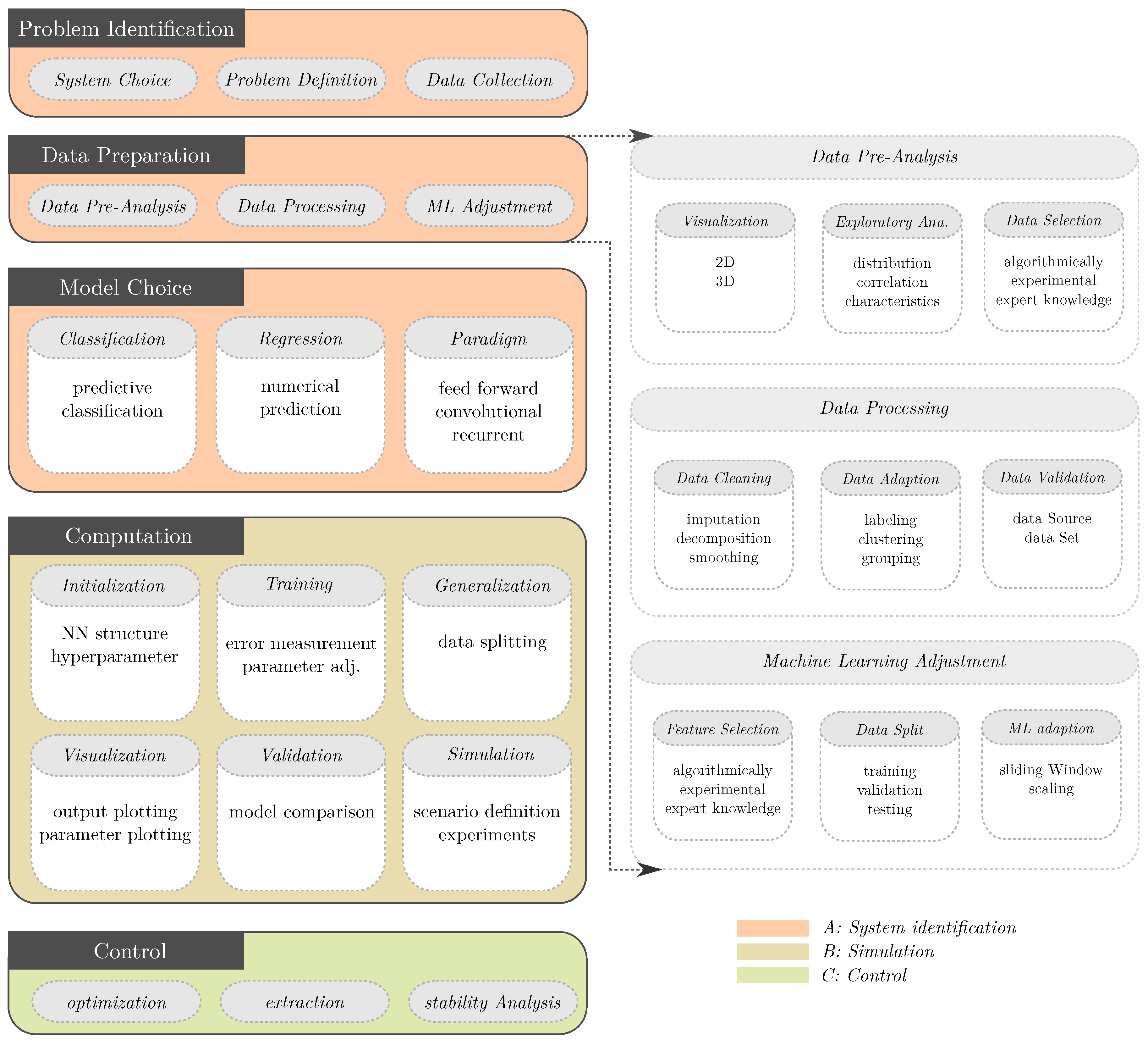
3. Modularized Framework for a Step-by-Step Virtualization
3.1. Step A: System Identification Modules
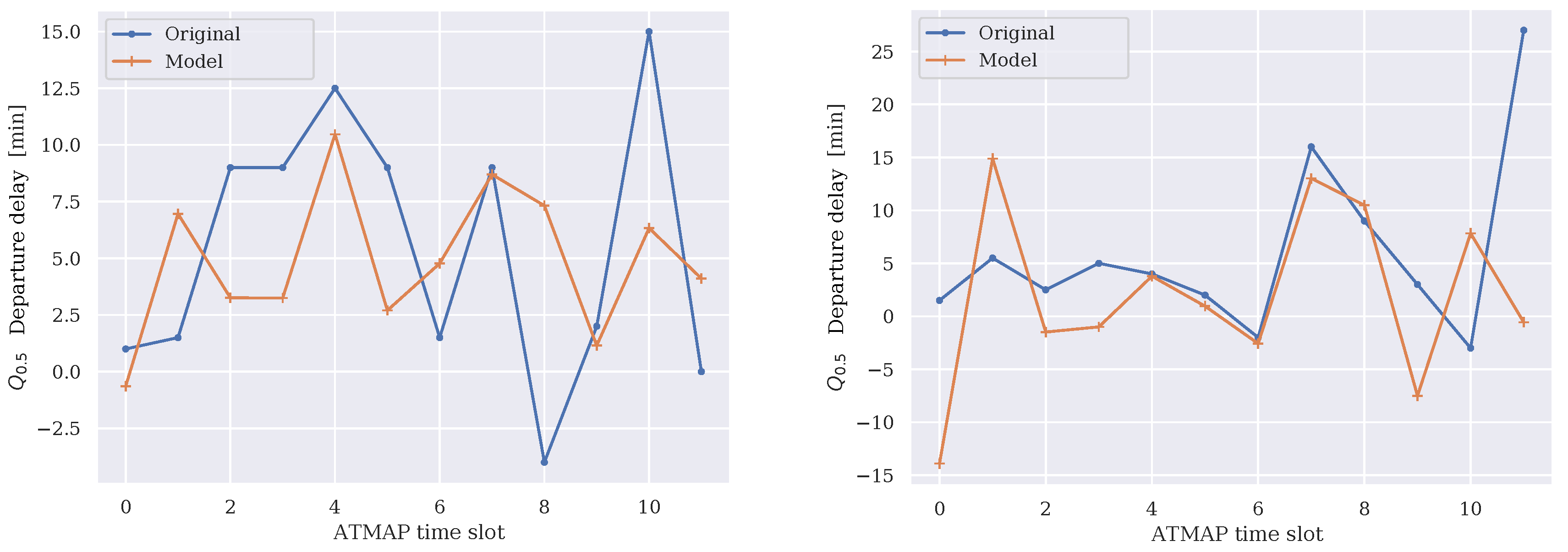
3.2. Step B: Simulation Modules (Prediction)
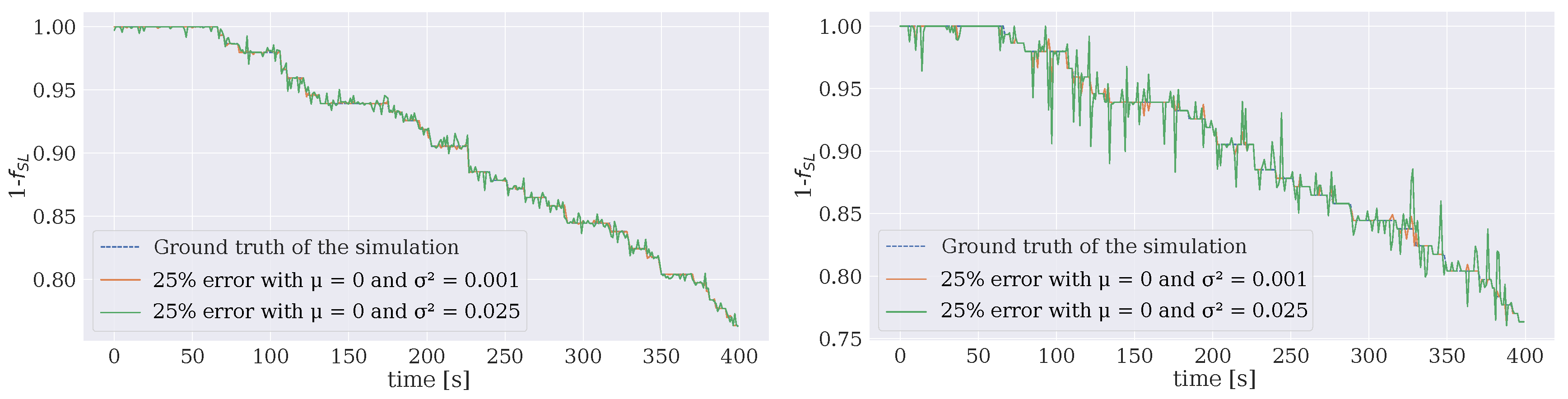
Robustness of Predictions
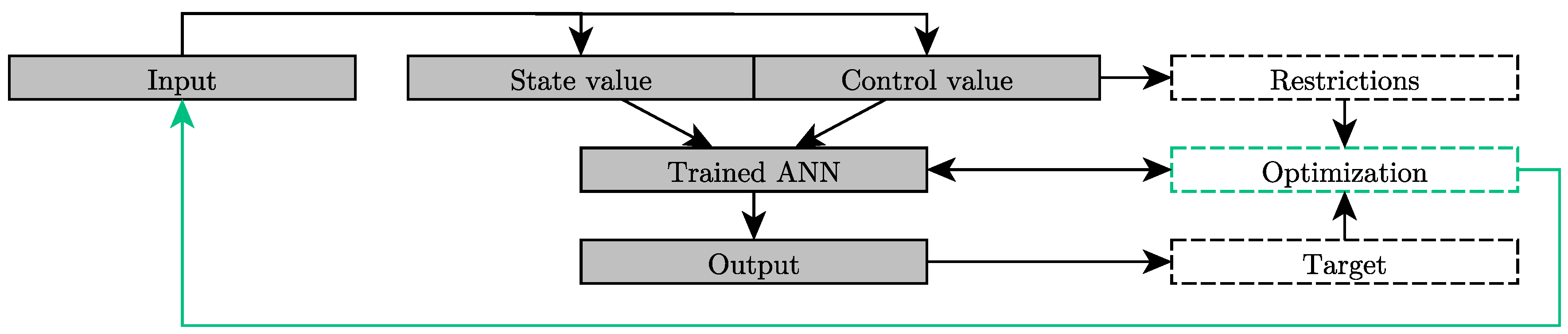
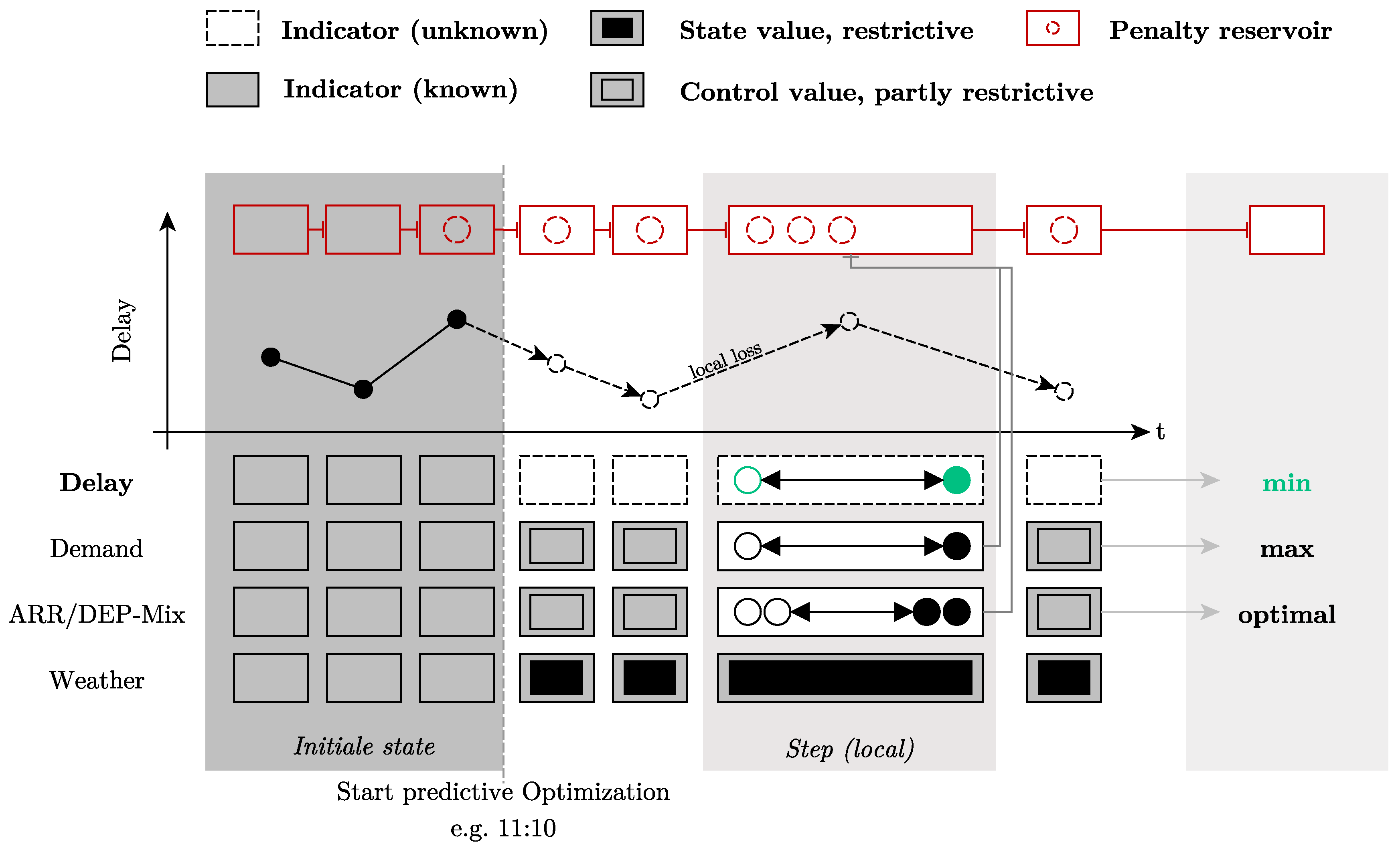
3.3. Step C: Control Modules
3.3.1. C1: Extraction of Interdependencies
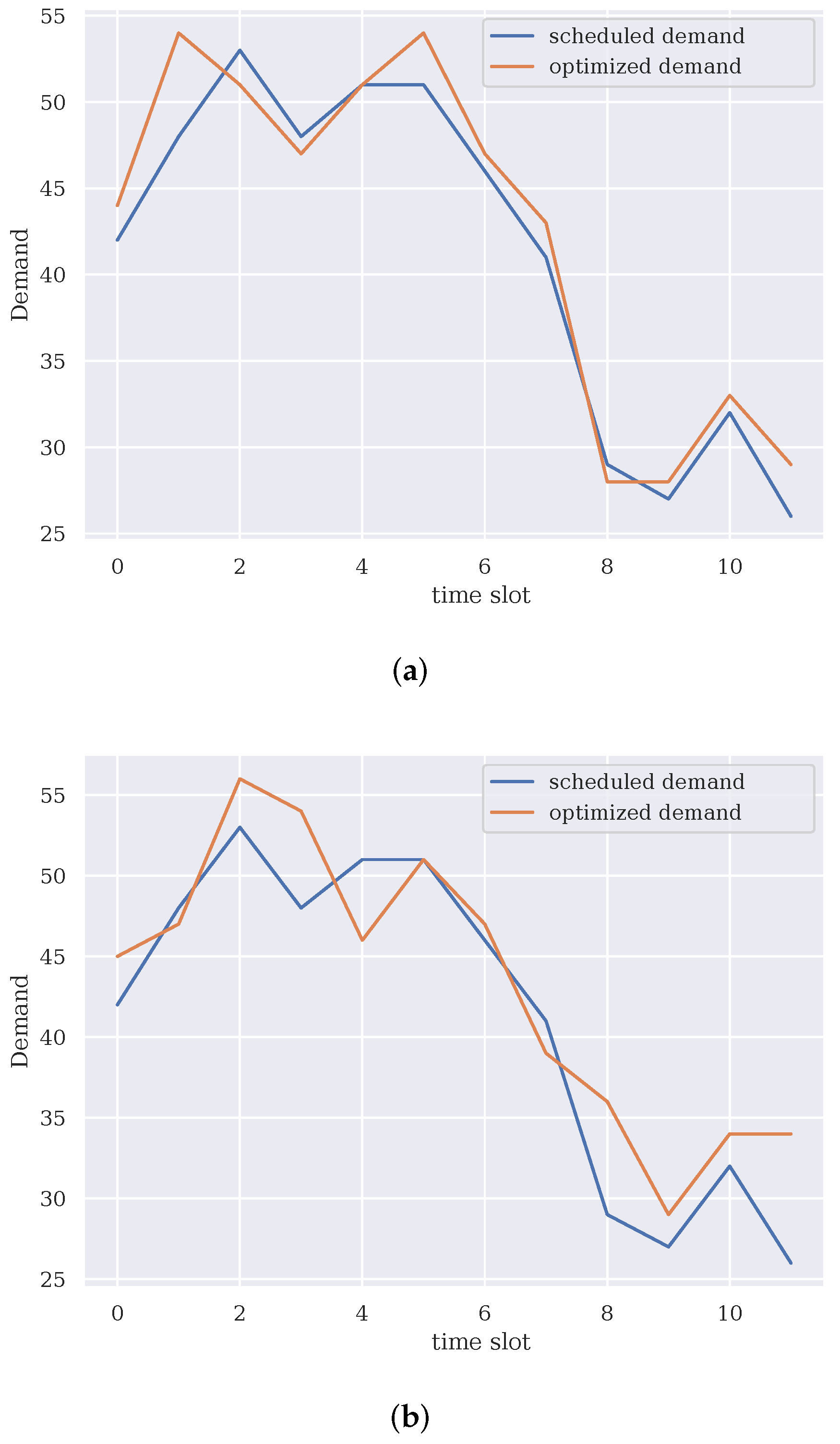
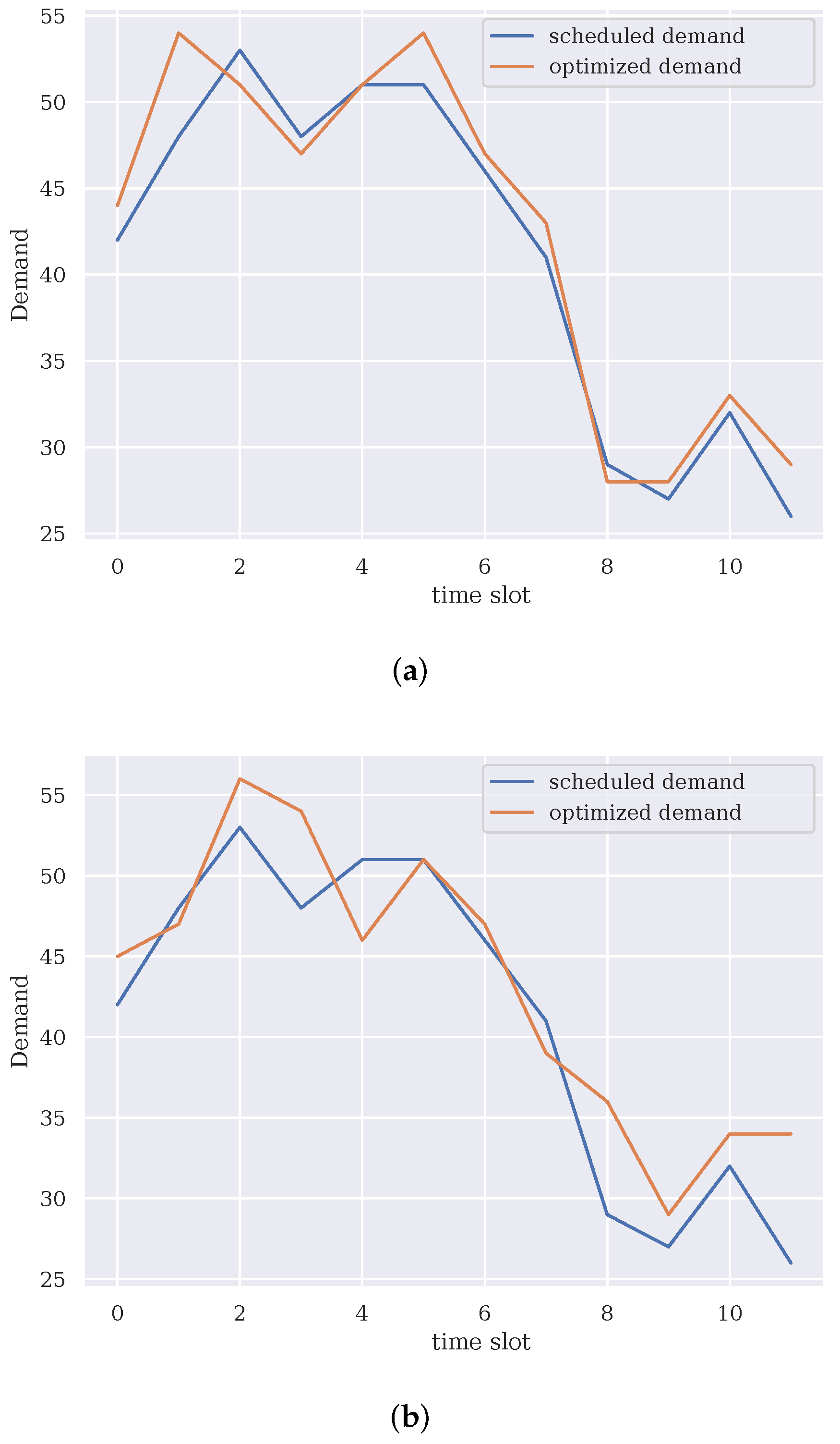
3.3.2. C2: Metaheuristic Optimization
4. Prototypical Applications
4.1. Step A/B: System Identification & Simulation
4.2. Step C: Control
5. Conclusions & Outlook
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| A-CDM | Airport collaborative decision making |
| AC | Aircraft |
| ACGT | Actual commencement of ground handling time |
| ADEP | Aerodrome of departure |
| ADES | Aerodrome of destination |
| ADS-B | Automatic dependent surveillance—broadcast |
| AI | Artificial intelligence |
| AIBT | Actual in-block time |
| ALDT | Actual landing time |
| ANN | Artificial neural network |
| ANN | Artificial neural network |
| ANNs | Artificial neural networks |
| ANNs | Artificial neural networks |
| ANSP | Air navigation service provider |
| AOBT | Actual off-block time |
| AP | Airport |
| ARDT | Actual ready time |
| ARR | Arrival |
| ASAT | Actual start-up approval time |
| ASMA | Arrival sequencing and metering area |
| ASRT | Actual start-up request time |
| ATC | Air traffic control |
| ATFCM | Air traffic flow and capacity management |
| ATFM | Air traffic flow management |
| ATM | Air traffic management |
| ATMAP | Air traffic management airport performance |
| ATOT | Actual take-off time |
| BGD | Batch gradient descent |
| BPTT | Backpropagation through time |
| CAD | CUSUM anomaly detection |
| CANSO | Civil Air Navigation Services Organisation |
| CI | Computational intelligence |
| CNN | Convolutional neural network |
| CNNs | Convolutional neural networks |
| CNS | Communication navigation surveillance |
| CUSUM | kumulierte Summe |
| DDR | Demand data repository |
| DEP | Departure |
| DFF | Deep feedforward network |
| DLR | Deutsches theZentrum für Luft- und Raumfahrt e.V. |
| DTW | Dynamic time warping |
| DWD | Deutscher Wetterdienst |
| EA | Evolutionäre Algorithmen |
| EC | Eurocontrol |
| EEC | Eurocontrol Experimental Center |
| EET | Estimated elapsed time |
| EK | Europäische Kommission |
| EOBT | Estimated off-block time |
| ETA | Estimated time of arrival |
| FAA | Federal Aviation Administration |
| FAB | Functional airspace block |
| FAF | Final approach fix |
| FAMOUS | Future airport management operation utility system |
| GUI | Grafische Benutzeroberfläche |
| HAM | Hamburg Airport |
| IAF | Initial approach fix |
| IATA | International Air Transport Association |
| IBS | Indivisible block system |
| ICAO | International Civil Aviation Organization |
| IFR | Instrument flight rules |
| ILS | Instrumentenlandesystem |
| KAMA | Kaufman’s adaptive moving average |
| KI | Künstliche Intelligenz |
| kMA | Moving average |
| kNNs | künstliche Neuronale Netze |
| KPA | Key performance area |
| KPAs | Key performance areas |
| KPI | Key performance indicator |
| KPIs | Key performance indicators |
| LGW | Gatwick Airport |
| LIME | Local interpretable model-agnostic explanations |
| LOU | Leave one out |
| LSTM | Long short-term memory |
| LSTMs | Long short-term memories |
| MAE | Mean absolute error |
| M-CDM | Multi-criteria decision making |
| METAR | Meteorological aerodrome report |
| METARs | Meteorological aerodrome reports |
| ML | Machine learning |
| MLP | Multi layer perceptron |
| MLPs | Multi layer perceptrons |
| MSE | Mean squared error |
| NLP | Natural language processing |
| OTP | On-time performance |
| PBAM | Performance-based airport management |
| PCA | Principle component analysis |
| PI | Performance indicator |
| PIs | Performance indicators |
| PRU | Performance review unit |
| PSO | Particle swarm optimization |
| IQR | Quantilsabstand |
| RBF | Radiales-Basisfunktionen-Netz |
| RBFs | Radiale-Basisfunktionen-Netze |
| RFE | Recursive feature selection |
| RMSE | Root-mean-square error |
| RNN | Recurrent neural network |
| RNNs | Rekurrente Neuronale Netze |
| RQA | Recurrence quantification analysis |
| RWY | Runway |
| SESAR | Single European Sky ATM Research |
| SGD | Stochastic gradient descent |
| SID | Standard instrument departure |
| SRS | Simple random sampling |
| STA | Scheduled time of arrival |
| STD | Scheduled time of departure |
| SVM | Support vector machines |
| TAF | Terminal aerodrome forecast |
| TAFs | Terminal aerodrome forecasts |
| TAM | Total airport management |
| TAMS | Total airport management suite |
| TDNN | Time delay neural network |
| TOBT | Target off-block time |
| TOP | Total operations planner |
| TSAT | Target start-up approval time |
| UTC | Universal time coordinated |
| vATM | Virtual air traffic management |
| WMO | World Meteorological Organization |
| DLR | Deutsches Zentrum für Luft- und Raumfahrt e.V. |
References
- Günther, Y.; Kern, S.; Loth, S.; Papenfuß, A.; Pick, A.; Schmitz, R.; Wenzel, S.; Gerz, T. P-Air-Form Abschlussbericht DLR IB 112-2015/02. 2015. Available online: https://elib.dlr.de/98642/1/IB-2015-02_P-AIR-FORM_Abschlussbericht.pdf (accessed on 8 May 2021).
- IATA. Airport CDM Implementation—The Manual. Available online: https://www.viennaairport.com/jart/prj3/va/uploads/data-uploads/CDM/cdm_implementation_manual[1].pdf (accessed on 8 May 2021).
- Schultz, M.; Reitmann, S. Machine learning approach to predict aircraft boarding. Transp. Res. Part C Emerg. Technol. 2019, 98, 391–408. [Google Scholar] [CrossRef]
- Reitmann, S.; Nachtigall, K. Applying Bidirectional Long Short-Term Memories (BLSTM) to Performance Data in Air Traffic Management for System Identification. In ICANN (2); Lecture Notes in Computer Science; Lintas, A., Rovetta, S., Verschure, P.F.M.J., Villa, A.E.P., Eds.; Springer: Berlin/Heidelberg, Germany, 2017; Volume 10614, pp. 528–536. [Google Scholar]
- Reitmann, S.; Schultz, M. Computation of Air Traffic Flow Management Performance with Long Short-Term Memories Considering Weather Impact. In Artificial Neural Networks and Machine Learning—ICANN 2018; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2018; Volume 11140, pp. 532–541. [Google Scholar] [CrossRef]
- Schultz, M.; Reitmann, S.; Alam, S. Predictive classification and understanding of weather impact on airport performance through machine learning. Transp. Res. Part C Emerg. Technol. 2021, 131, 103–119. [Google Scholar] [CrossRef]
- EUROCONTROL. Episode 3 D2.4.1-04—Performance Framework, 3.06 ed.; EUROCONTROL: Brussels, Belgium; Available online: https://www.eurocontrol.int/sites/default/files/library/E3-WP3-D3.3.4-02-REP-V1.00-simulation-report.pdf (accessed on 8 May 2021).
- International Civil Aviation Organization. Manual on Global Performance of the Air Navigation System (Doc 9883); International Civil Aviation Organization: Montreal, QC, Canada, 2009. [Google Scholar]
- International Civil Aviation Organization. 2013–2028 Global Air Navigation Plan (Doc 9750); International Civil Aviation Organization: Montreal, QC, Canada, 2013. [Google Scholar]
- Stegner, C. Leistungs- und Qualitätsmessung für einen Passagierorientierten Umgang mit Betriebsstörungen im Luftverkehr. Ph.D. Thesis, Brandenburgische Technische Universität Cottbus, Cottbus, Germany, 2015. [Google Scholar]
- International Civil Aviation Organization. Performance Based Transition Guidelines; International Civil Aviation Organization: Montreal, QC, Canada, 2007. [Google Scholar]
- Wyman, O. Guide to Airport Performance Measures; Airports Council International, ACI: Montreal, QC, Canada, 2012. [Google Scholar]
- Maa, X.; Tao, Z.; Yu, H.; Wang, Y. Long short-term memory neural network for traffic speed prediction using remote microwave sensor data. Transp. Res. Part C 2015, 54, 187–197. [Google Scholar] [CrossRef]
- Zhu, Y.; Mao, B.; Bai, Y.; Chen, S. A bi-level model for single-line rail timetable design with consideration of demand and capacity. Transp. Res. Part C 2017, 85, 211–233. [Google Scholar] [CrossRef]
- Zhang, Z.; He, Q.; Gao, J.; Ni, M. A deep learning approach for detecting traffic accidents from social media data. Transp. Res. Part C 2018, 86, 580–596. [Google Scholar] [CrossRef] [Green Version]
- Lv, Y.; Duan, Y.; Kang, W.; Li, Z.; Wang, F.Y. Traffic Flow Prediction With Big Data: A Deep Learning Approach. IEEE Trans. Intell. Transp. Syst. 2015, 16, 865–873. [Google Scholar] [CrossRef]
- Polson, N.; Sokolov, V. Deep learning for short-term traffic flow prediction. Transp. Res. Part C 2017, 79, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Zhou, M.; Qu, X.; Li, X. A recurrent neural network based microscopic car following model to predict traffic oscillation. Transp. Res. Part C 2017, 84, 245–264. [Google Scholar] [CrossRef]
- Zhong, R.X.; Luo, J.C.; Cai, H.X.; Sumalee, A.; Yuan, F.F.; Chow, A.H. Forecasting journey time distribution with consideration to abnormal traffic conditions. Transp. Res. Part C 2017, 85, 292–311. [Google Scholar] [CrossRef]
- Yu, L.; Wang, S.; Lai, K.K. An Integrated Data Preparation Scheme for Neural Network Data Analysis. IEEE Trans. Knowl. Data Eng. 2006, 18, 217–230. [Google Scholar]
- Schultz, M.; Lorenz, S.; Schmitz, R.; Delgado, L. Weather Impact on Airport Performance. Aerospace 2018, 5, 109. [Google Scholar] [CrossRef] [Green Version]
- Reitmann, S.; Gillissen, A.; Schultz, M. Performance Benchmarking in Interdependent ATM Systems. In Proceedings of the International Conference on Research in Air Transportation (ICRAT), Philadelphia, PA, USA, 20 June 2016. [Google Scholar]
- Shebalov, S.; Klabjan, D. Robust airline crew pairing: Move-up crews. Transp. Sci. 2006, 40, 300–312. [Google Scholar] [CrossRef]
- Oreschko, B.; Schultz, M.; Elflein, J.; Fricke, H. Significant turnaround process variations due to airport characteristics. In Proceedings of the First International Air Transport and Operations Symposium 2010; IOS Press: Amsterdam, The Netherlands, 2010. [Google Scholar]
- Fricke, H.; Schultz, M. Improving aircraft turn around reliability. In Proceedings of the Third International Conference on Research in Air Transportation, Lucerne, Switzerland, 1–4 June 2008; pp. 335–343. [Google Scholar]
- Schultz, M.; Fricke, H. Managing passenger handling at airport terminals. In Proceedings of the 9th USA/Europe Air Traffic Management Research and Development Seminar, Berlin, Germany, 13–16 June 2011; pp. 14–17. [Google Scholar]
- Kreuz, M.; Schultz, M. A System Dynamics Approach towards ANSP Modeling. In Proceedings of the 15th AIAA Aviation Technology, Integration, and Operations Conference, Washington, DC, USA, 13–17 June 2015; p. 2892. [Google Scholar]
- CANSO. Recommended Key Performance Indicators for Measuring ANSP Operational Performance; CANSO: Amsterdam, The Netherland, 2015. [Google Scholar]
- IATA. Airport Handling Manual: Standard IATA Delay Codes. Available online: https://ansperformance.eu/library/iata-delay-codes.pdf (accessed on 8 May 2021).
- Schultz, M. Implementation and application of a stochastic aircraft boarding model. J. Transp. Res. Part C Emerg. Technol. 2018, 90, 334–349. [Google Scholar] [CrossRef]
- Schultz, M. Field trial measurements to validate a stochastic aircraft boarding model. Aerospace 2018, 5, 27. [Google Scholar] [CrossRef] [Green Version]
- Schultz, M. Aircraft Boarding-Data, Validation, Analysis. In Proceedings of the 12th USA/Europe Air Traffic Management Research and Development Seminar, Seattle, WA, USA, 27–30 June 2017; pp. 26–30. [Google Scholar]
- Schultz, M. A metric for the real-time evaluation of the aircraft boarding progress. J. Transp. Res. Part C Emerg. Technol. 2018, 86, 467–487. [Google Scholar] [CrossRef]
- Bar-Yam, Y. Dynamics of Complex Systems; Addison-Wesley Reading: Boston, MA, USA, 1997; Volume 213. [Google Scholar]
- Reitmann, V. Reguläre und Chaotische Dynamik; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Cessac, B. A view of Neural Networks as dynamical systems. Int. J. Bifurcat. Chaos 2010, 20, 1585–1629. [Google Scholar] [CrossRef] [Green Version]
- Floridi, L.; Abstraction, T.M.O. Levellism and the Method of Abstraction. Available online: https://www.semanticscholar.org/paper/Levellism-and-the-Method-of-Abstraction-Floridi/46010b386f4a927ac539c6e7177e9f1ade1c1dcf (accessed on 8 May 2021).
- Gers, F.; Eck, D.; Schmidhuber, J. Applying LSTM to Time Series Predictable Through Time-Window Approaches. In Proceedings of the International Conference on Artificial Neural Networks; Springer-Verlag: London, UK, 2001; pp. 669–676. [Google Scholar]
- Gers, F.; Schraudolph, N.; Schmidhuber, J. Learning Precise Timing with LSTM Recurrent Networks. J. Mach. Learn. Res. 2002, 3, 115–143. [Google Scholar]
- Gers, F.A.; Schmidhuber, J.; Cummins, F. Learning to Forget: Continual Prediction with LSTM. Neural Comput. 2006, 12, 2451–2471. [Google Scholar] [CrossRef]
- Anderson, M.; Bartolo, A.; Tandon, P. Crafting Adversarial Attacks on Recurrent Neural Networks. 2017. Available online: http://cs229.stanford.edu/proj2017/final-reports/5241898.pdf (accessed on 8 May 2021).
- Szegedy, C.; Zaremba, W.; Sutskever, I.; Bruna, J.; Erhan, D.; Goodfellow, I.; Fergus, R. Intriguing properties of neural networks. arXiv 2014, arXiv:1312.6199v4. [Google Scholar]
- Goodfellow, I.J.; Shlens, J.; Szegedy, C. Explaining and Harnessing Adversarial Examples. arXiv 2015, arXiv:1412.6572v3. [Google Scholar]
- Su, J.; Vargas, D.V.; Kouichi, S. One pixel attack for fooling deep neural networks. arXiv 2019, arXiv:1710.08864v6. [Google Scholar] [CrossRef] [Green Version]
- Rosenberg, I.; Shabtai, A.; Elovici, Y.; Rokach, L. Defense Methods Against Adversarial Examples for Recurrent Neural Networks. arXiv 2019, arXiv:1901.09963. [Google Scholar]
- Schmitz, A. Erkennung von Nichtlinearitäten und wechselseitigen Abhängigkeiten in Zeitreihen. Ph.D. Thesis, Uni Wuppertal, Wuppertal, Germany, 2001. [Google Scholar]
- Sörensen, K. Metaheuristics—The metaphor exposed. Int. Trans. Oper. Res. 2015, 22, 3–18. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar] [CrossRef]
- Shi, Y.; Eberhart, R. A modified particle swarm optimizer. In Proceedings of the 1998 IEEE International Conference on Evolutionary Computation Proceedings, IEEE World Congress on Computational Intelligence (Cat. No.98TH8360), Anchorage, AK, USA, 4–9 May 1998; pp. 69–73. [Google Scholar] [CrossRef]
- Pourbahrami, S. Improving PSO Global Method for Feature Selection According to Iterations Global Search and Chaotic Theory. arXiv 2018, arXiv:1811.08701. [Google Scholar]
- Miranda, L.J.V. PySwarms, a research-toolkit for Particle Swarm Optimization in Python. J. Open Source Softw. 2018, 3, 433. [Google Scholar] [CrossRef] [Green Version]
- Reitmann, S.; Schultz, M.; Alam, S. Advanced Quantification of Weather Impact on Air Traffic Management. In Proceedings of the Air Traffic Management Research and Development Seminar (ATM2019), Vienna, Austria, 17–21 June 2019. [Google Scholar]
- Yu, B.; Guo, Z.; Asian, S.; Wang, H.; Chen, G. Flight delay prediction for commercial air transport: A deep learning approach. Transp. Res. Part E Logist. Transp. Rev. 2019, 125, 203–221. [Google Scholar] [CrossRef]
- Vandal, T.; Livingston, M.; Piho, C.; Zimmerman, S. Prediction and Uncertainty Quantification of Daily Airport Flight Delays. PAPIs 2017, 2017, 45–51. [Google Scholar]
- Gopalakrishnan, K.; Balakrishnan, H. A Comparative Analysis of Models for Predicting Delays in Air Traffic Networks. MIT Web Domain. Available online: https://www.semanticscholar.org/paper/A-comparative-analysis-of-models-for-predicting-in-Gopalakrishnan-Balakrishnan/7874814b2ad17b58ab61768bbd1accd1ca5a972c (accessed on 8 May 2021).
- Sternberg, A.; Soares, J.; Carvalho, D.; Ogasawara, E. A Review on Flight Delay Prediction. arXiv 2017, arXiv:1703.06118. [Google Scholar]
- Oliver Brandmueller, K.W. ESP32-Paxcounter. 2018. Available online: https://github.com/cyberman54/ESP32-Paxcounter (accessed on 8 May 2021).
- Sun, X.; Wandelt, S.; Zheng, C.; Zhang, A. COVID-19 pandemic and air transportation: Successfully navigating the paper hurricane. J. Air Transp. Manag. 2021, 94, 102062. [Google Scholar] [CrossRef]
- Schultz, M.; Soolaki, M. Optimized aircraft disembarkation considering COVID-19 regulations. Transp. B Transp. Dyn. 2021, 2021, 1–21. [Google Scholar] [CrossRef]
- Schultz, M.; Soolaki, M. Analytical approach to solve the problem of aircraft passenger boarding during the coronavirus pandemic. Transp. Res. Part C Emerg. Technol. 2021, 124, 102931. [Google Scholar] [CrossRef] [PubMed]
- Schultz, M.; Evler, J.; Asadi, E.; Preis, H.; Fricke, H.; Wu, C.L. Future aircraft turnaround operations considering post-pandemic requirements. J. Air Transp. Manag. 2020, 89, 101886. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| A: Hamburg Airport (HAM) | B: Airport Gatwick Airport (LGW) | C: Boarding Airbus A320 | |
|---|---|---|---|
| Data source(s) | Flightstats, FlightRadar24, Openflights | simulation [30] | |
| Time domain | 2013 | 2012–08/2015 | 25.000 boardings for 6 strategies |
| Data tuples | 12.762 | 63.854 | 150.000 |
| Features | 9 | 12 | 4 |
| Goal of artificial neural networks (ANN) | prediction & classification of flight delays | prediction of boarding time | |
| Publication | [4,5,6] | [3] | |
 |
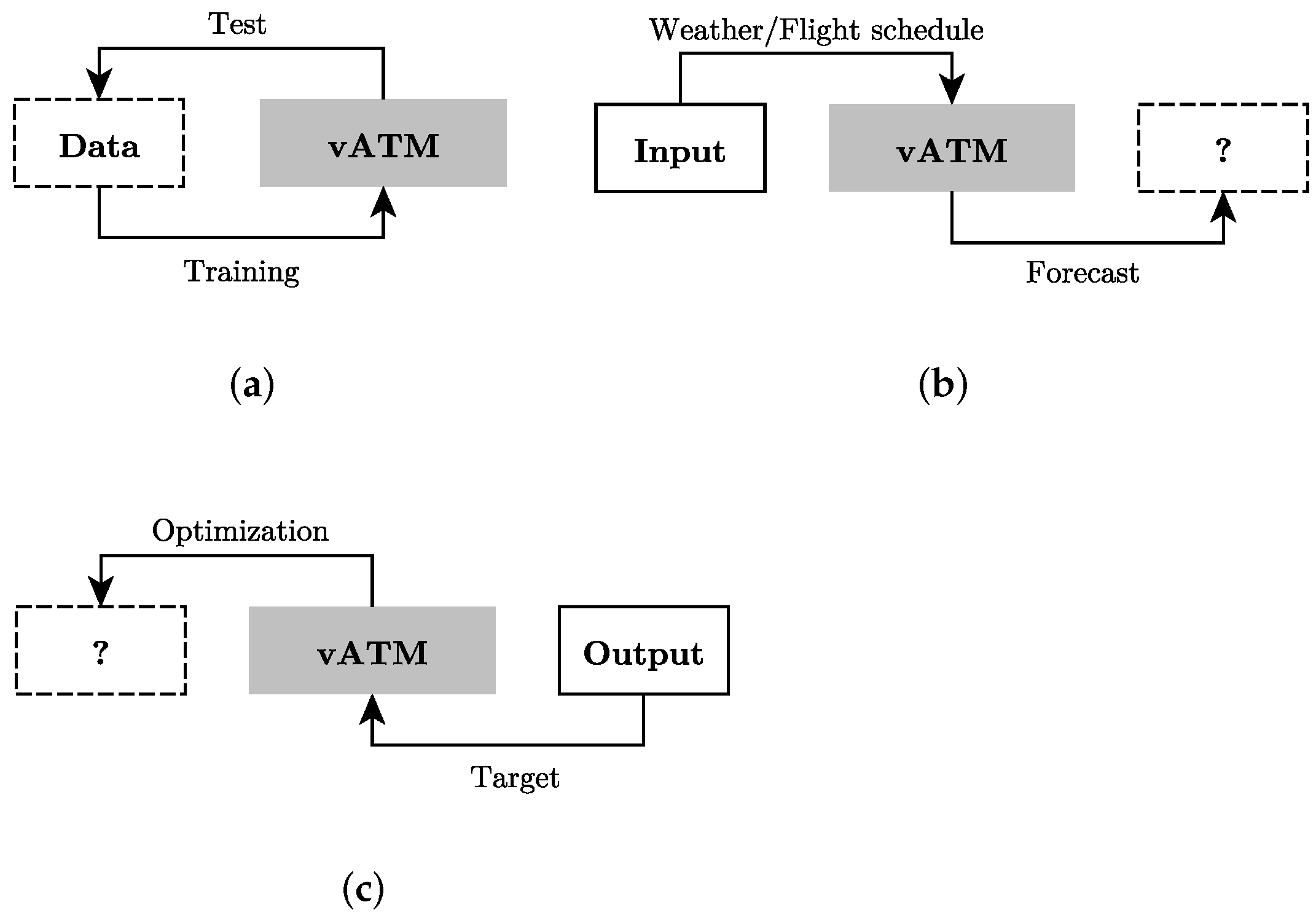
| Input X | System | Output y | Description |
|---|---|---|---|
| given | unknown | given | System identification: ways to create a data-based virtual system map (vATM), taking into account process-related constraints (e.g., weather influence, flight demand). |
| given | given | unknown | Simulation: prediction of system state given known input quantities to estimate future behavior patterns (e.g., delay evolution). |
| unknown | given | given | Control: deriving recommended actions to achieve defined objectives (e.g., flight demand estimation to minimize delays). |
| Module | Description |
|---|---|
| A1: Problem identification | Detailed consideration of the purpose for which a system identification needs to be performed and how it will be used |
| A2: Data structure analysis | Includes modules to evaluate data base |
| Data pre-analysis | Exploratory analysis and visualization of data to select appropriate inputs |
| Data processing | Data adaptation to the ML problem, error analysis if necessary |
| Artificial neural networks (ANN) adjustment | preparation for application, selection of features and training data |
| A3: Model choice | |
| Regression | Direct mapping of discrete targets from multiple inputs |
| Classification | Reduction of correlation analyses to labels/intervals |
| Paradigm | Feed forward, recurrent, convolutional (depends on target) |
| A/B: Computation | Translation from learning (system identication) to forecast/prediction (simulation) |
| C: Control | Includes extraction, optimization and stability of the artificial neural networks (ANN) |
| Original | ∑ | Delay [min] | ||||||
|---|---|---|---|---|---|---|---|---|
| Demand | 48 | 48 | 51 | 41 | 27 | 26 | 494 | |
| STA | 21 | 25 | 23 | 16 | 13 | 21 | 252 | 13.44 |
| STD | 28 | 23 | 23 | 25 | 14 | 5 | 242 | |
| PSO | ∑ | Delay [min] | ||||||
| Demand | 54 | 47 | 54 | 43 | 28 | 29 | 509 | |
| STA | 23 | 24 | 29 | 17 | 12 | 22 | 254 | 12.09 |
| STD | 31 | 23 | 25 | 26 | 16 | 7 | 255 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Reitmann, S.; Schultz, M. An Adaptive Framework for Optimization and Prediction of Air Traffic Management (Sub-)Systems with Machine Learning. Aerospace 2022, 9, 77. https://doi.org/10.3390/aerospace9020077
Reitmann S, Schultz M. An Adaptive Framework for Optimization and Prediction of Air Traffic Management (Sub-)Systems with Machine Learning. Aerospace. 2022; 9(2):77. https://doi.org/10.3390/aerospace9020077
Chicago/Turabian StyleReitmann, Stefan, and Michael Schultz. 2022. "An Adaptive Framework for Optimization and Prediction of Air Traffic Management (Sub-)Systems with Machine Learning" Aerospace 9, no. 2: 77. https://doi.org/10.3390/aerospace9020077
APA StyleReitmann, S., & Schultz, M. (2022). An Adaptive Framework for Optimization and Prediction of Air Traffic Management (Sub-)Systems with Machine Learning. Aerospace, 9(2), 77. https://doi.org/10.3390/aerospace9020077