
A Leakage Rate Model for Metal-to-Metal Seals Based on the Fractal Theory of Porous Medium


Abstract
1. Introduction
2. Materials and Methods
2.1. Simulation of Rough Surfaces
2.2. Contact Model of Rough Surface
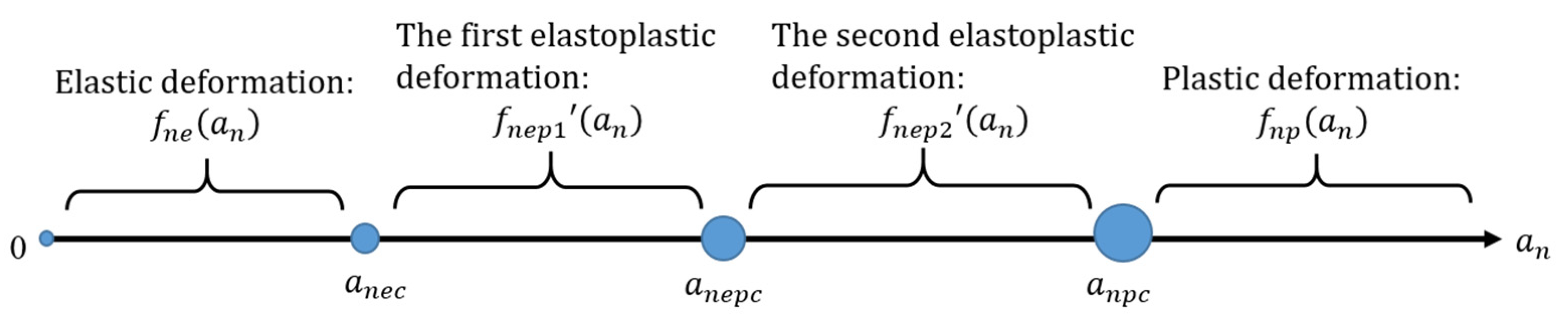
- Step 1: The deformation law of a single asperity on a rough surface is obtained. The deformation of asperities is divided into four stages: the elastic deformation stage, the first elastic-plastic deformation stage, the second elastic-plastic deformation stage and the plastic deformation stage. Based on contact mechanics and fractal theory, the relationship between the contact area and the contact load of a single asperity in each deformation stage is deduced and obtained, and the change in material hardness with the interference is considered when analyzing the contact characteristics of a single asperity within the first and second elastoplastic deformation stages. The diagram of the deformation law of a single asperity is shown in Figure 5. , and are the elastic critical contact area, the first elastoplastic critical contact area and the second elastoplastic critical contact area, respectively. , , and are the contact loads of a single asperity at different deformation stages.
- Step 2: The size distribution function of contact spots at different frequency levels is derived. We assume that asperities at each frequency level have their own distribution. By theoretical derivation, the total real contact area of asperities at each frequency level and the largest contact area of the asperity at each frequency level are obtained.
- Step 3: The expressions of asperity critical frequency levels are re-derived. We assume that all the contact asperities deform elastically if the largest interference of the asperity is not greater than its critical interference , i.e., . Based on this assumption, the elastic critical frequency level , the first elastoplastic critical frequency level and the second elastoplastic critical frequency level are obtained.
- Step 4: The relationship between the real contact area and the contact load of the rough surface is obtained. The “contact area–contact load” relationship of the entire rough surface is obtained through integration based on the “contact area–contact load” relationship of a single asperity.
2.3. Intrinsic Parameters of the Porous Medium
2.3.1. The Existing Calculation Procedure for the Number of Pores and Fractal Dimension of Pore Space
2.3.2. The Novel Method for Calculating the Porosity
- 1.
- Calculation of total asperity volume
- 2.
- Calculation of total volume of porous medium space
- 3.
- Expression of porosity
2.3.3. The Novel Method for Calculating the Maximum and Minimum Leakage Microchannel Diameters
2.3.4. The Existing Calculation Procedure for the Tortuosity and the Tortuosity Fractal Dimension of the Leakage Microchannel
2.4. Leakage Rate Model
3. Results
4. Discussion
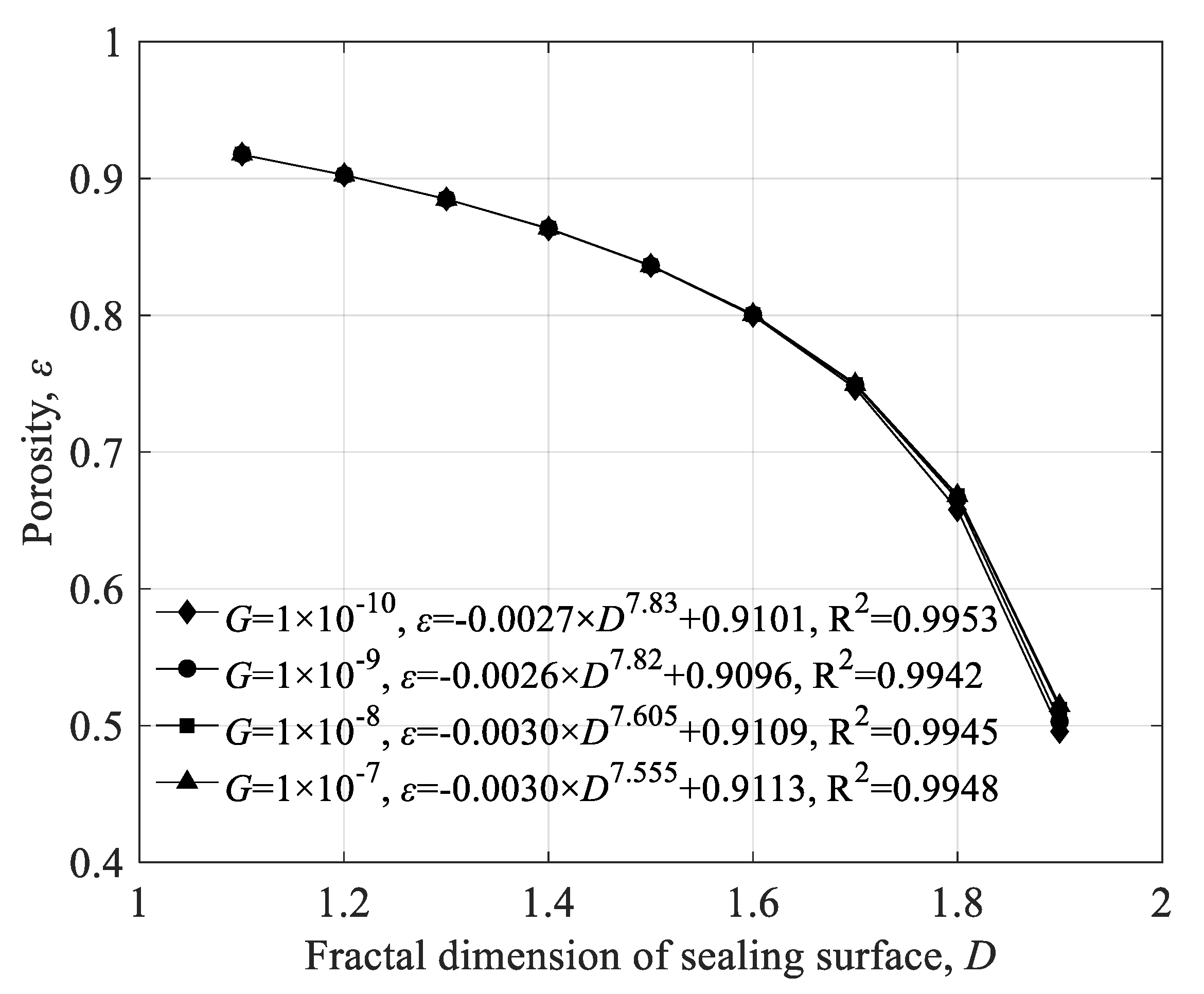
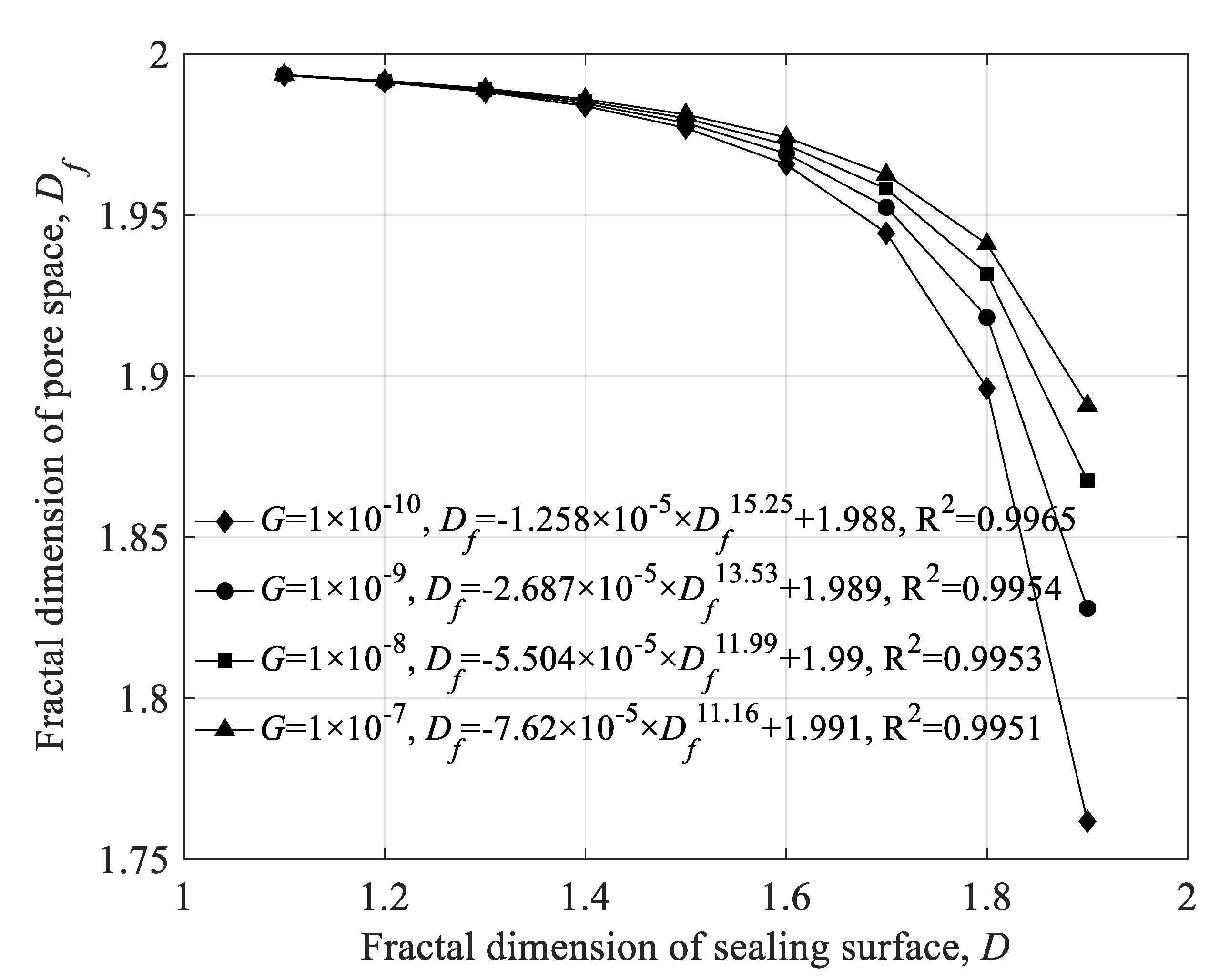
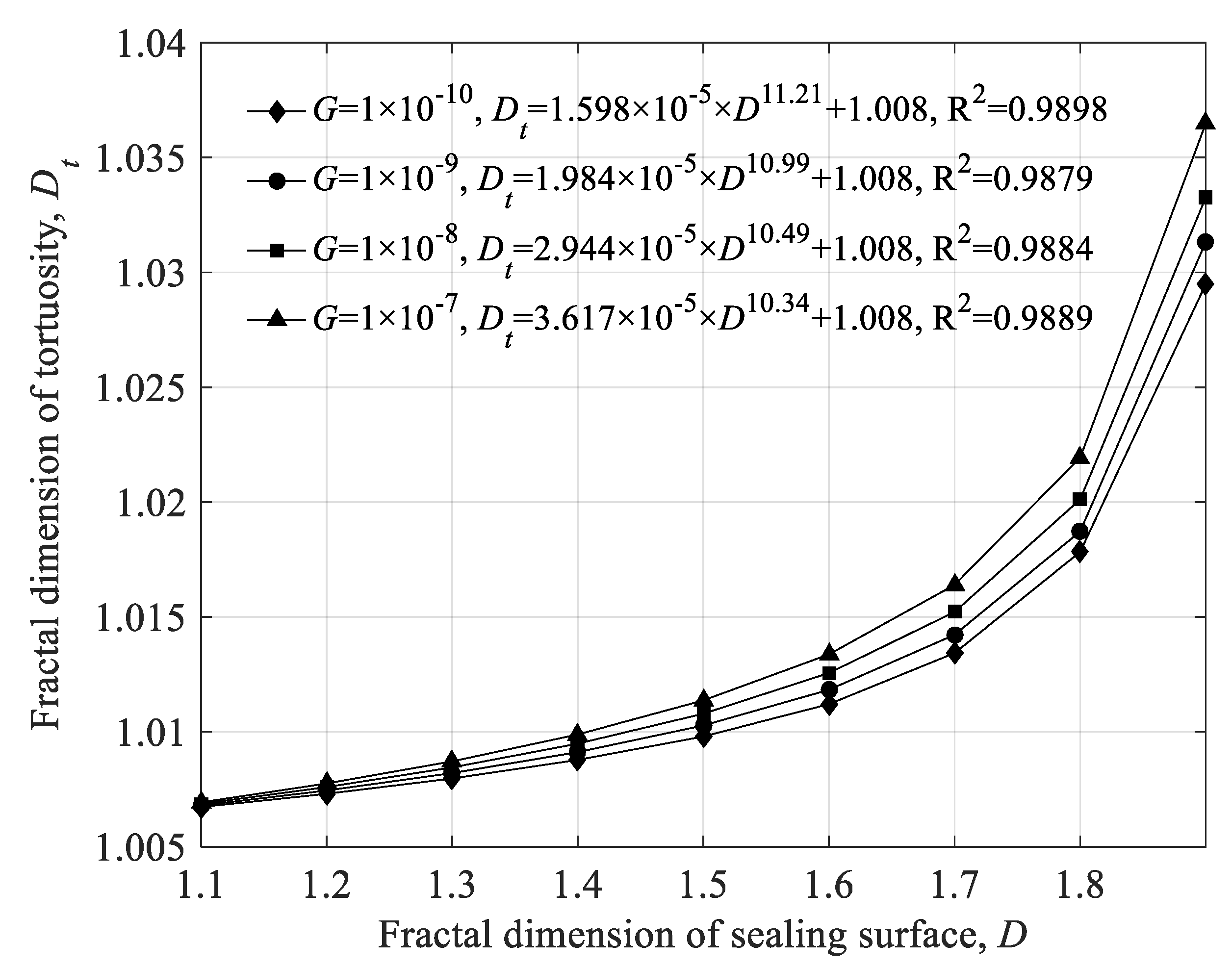
4.1. Influence of Fractal Parameters of Sealing Surface on the Intrinsic Parameters of the Porous Medium
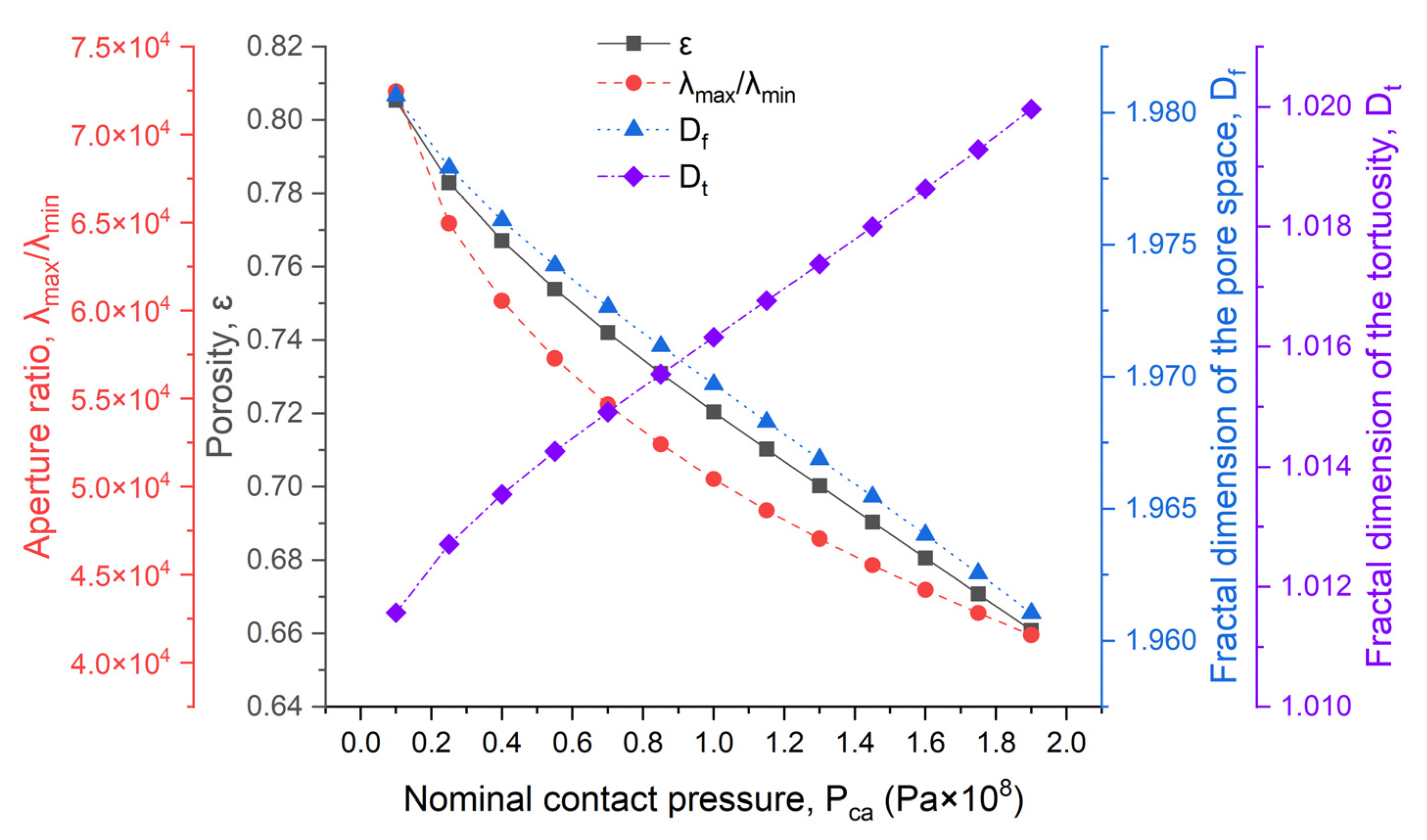
4.2. Influence of Contact Pressure on the Intrinsic Parameters of the Porous Medium
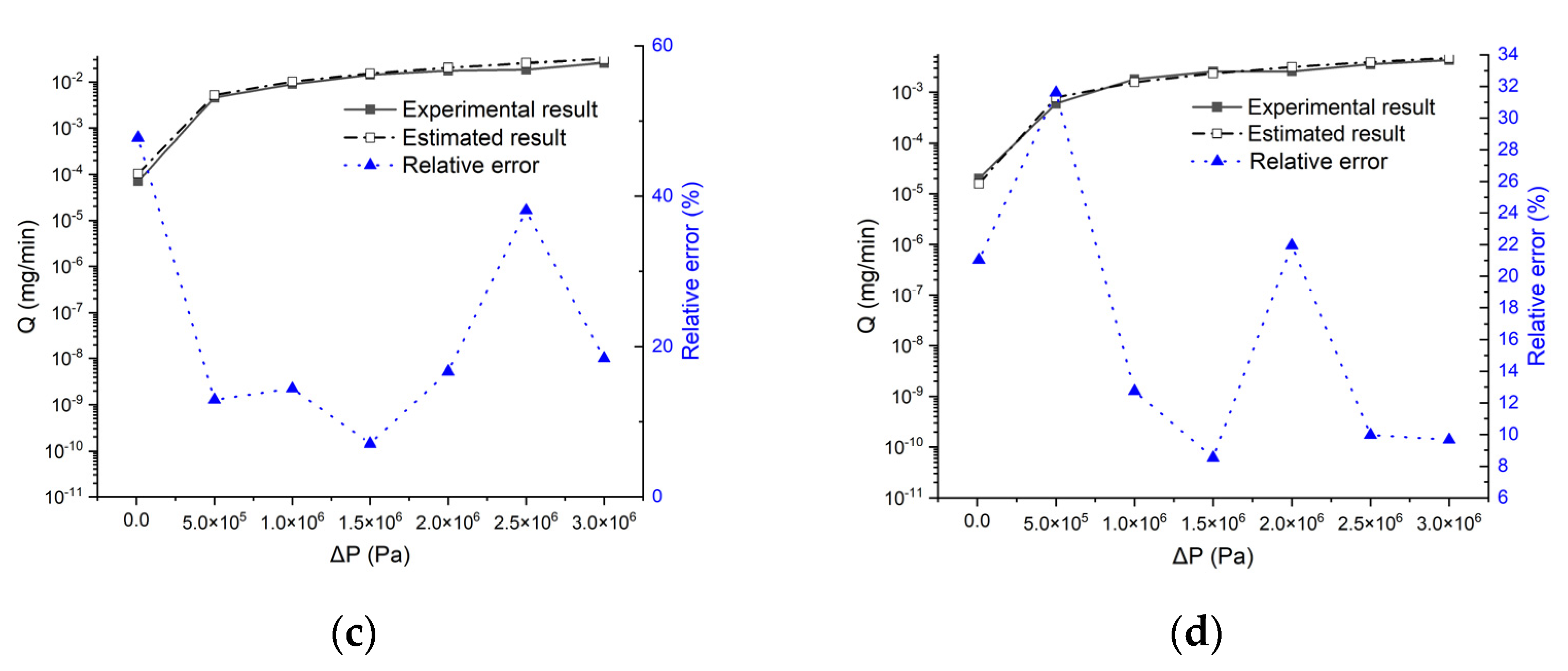
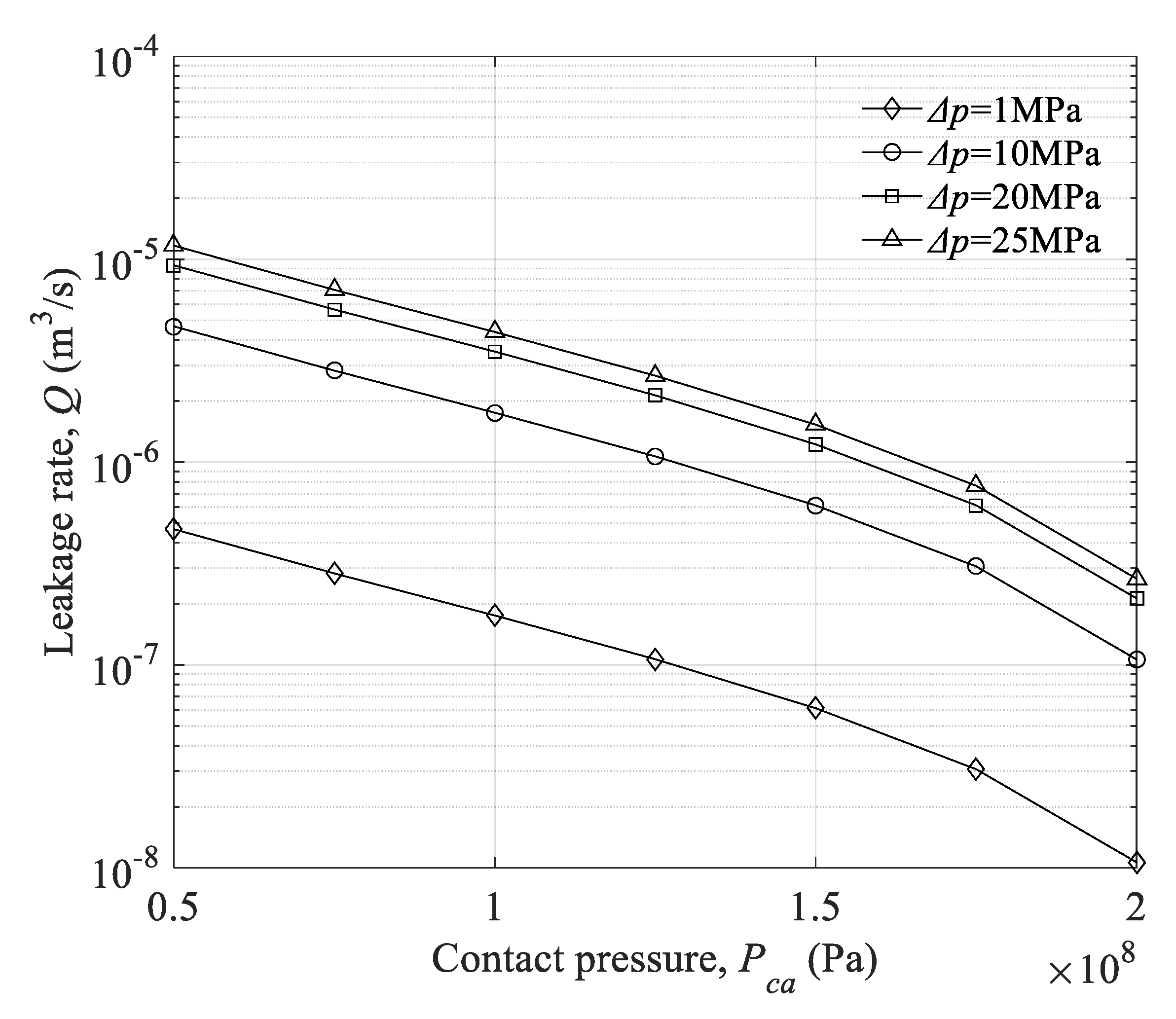
4.3. Influence of Fractal Parameters of Sealing Surface and Contact Pressure on the Leakage Rate
5. Conclusions
- (1)
- The topography parameters of the sealing surface have a significant influence on the porosity, aperture ratio and fractal dimension of pore space among the intrinsic parameters of the sealing area, especially considering that the effect on the aperture ratio spans nearly six orders of magnitude, while the surface structure parameters have no significant effect on the fractal dimension of tortuosity.
- (2)
- Porosity, aperture ratio and fractal dimension of pore space decrease with an increase in contact pressure, while the fractal dimension of tortuosity increases with an increase in contact pressure.
- (3)
- The sealing surface topography parameters have an important influence on the leakage rate of metal-to-metal seals, and, the smoother the sealing surface, the lower the leakage rate of the metal-to-metal seal.
- (4)
- The leakage rate of the metal-to-metal seal decreases with an increase in the contact pressure of the sealing surface, and, if the fluid pressure difference of the sealing medium is too large, the sealing performance of the metal-to-metal seal will be seriously reduced.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| /(m) | Separation distance between the rigid flat plane and the mean plane |
| Fractal dimension of the 2D rough surface | |
| Fractal dimension of Euclidean space | |
| Fractal dimension of the pore space | |
| Fractal dimension of the 3D rough surface | |
| Tortuosity fractal dimension of the leakage microchannel | |
| /(Pa) | Young’s modulus |
| Probability density function of the pore distribution | |
| /(m) | Characteristic length scale of the rough surface |
| /(m) | effective height that can provide an effective channel for the leakage of the sealing medium |
| /(Pa) | Material hardness |
| /(m) | Linear length or characteristic length along the direction of the macroscopic pressure gradient of the fluid |
| /(m) | Base diameter of the asperity on the frequency level |
| /(m) | Sampling length |
| /(m) | Length scale of the asperity or contact spot at frequency level |
| /(m) | Curved streamline length |
| Number of superposed ridges used to simulate the surfaces | |
| Low cut-off frequency level | |
| High cut-off frequency level | |
| Volume distribution function | |
| Total number of leakage microchannels | |
| Number of asperities per unit area with a volume larger than | |
| /(Pa) | Fluid pressure difference |
| /(Pa) | Contact force |
| /(mg/min) | Flow rate of the sealing medium through a single leakage microchannel with a diameter of |
| /(mg/min) | Leakage rate |
| /(m) | Root mean square deviation of the rough surface profile |
| /(m3) | Volume of the largest asperity |
| /(m3) | Volume of the smallest asperity |
| /(m3) | Volume of a single asperity on the frequency level |
| /(m3) | Pore volume of a group of pores |
| /(m3) | Total asperity volume of a rough surface |
| /(m3) | Total volume of a group of pores |
| Porosity | |
| Random phase | |
| Scaling parameters for the Weierstrass–Mandelbrot function | |
| /(m) | Pore size or cross-sectional diameter of the leakage microchannel |
| /(m) | Average diameter of the cross-section of the leakage microchannels |
| /(m) | Pore size of the largest leakage microchannel |
| /(m) | Pore size of the smallest leakage microchannel |
| /(Pa·s) | Dynamic viscosity |
| /(Kg/m3) | Fluid density |
| Average tortuosity | |
| Tortuosity | |
| Poisson’s ratio | |
| /(m) | contact interference |
References
- Zhai, J.; Li, J.; Wei, D.; Gao, P.; Yan, Y.; Han, Q. Vibration Control of an Aero Pipeline System with Active Constraint Layer Damping Treatment. Appl. Sci. 2019, 9, 2094. [Google Scholar] [CrossRef]
- Li, Z.; Gao, P.; Zhao, D.; Liu, J. Fault diagnosis and location of the aero-engine hydraulic pipeline based on Kalman filter. Adv. Mech. Eng. 2017, 9. [Google Scholar] [CrossRef]
- Chen, Z.; Liu, Y.; Zhou, P. A Novel Method to Identify the Scaling Region of Rough Surface Profile. Fractals 2019, 27, 1950011. [Google Scholar] [CrossRef]
- Yan, Y.; Chai, M. Sealing failure and fretting fatigue behavior of fittings induced by pipeline vibration. Int. J. Fatigue 2020, 136, 105602. [Google Scholar] [CrossRef]
- Yan, Y.; Zhai, J.; Gao, P.; Han, Q. A multi-scale finite element contact model for seal and assembly of twin ferrule pipeline fittings. Tribol. Int. 2018, 125, 100–109. [Google Scholar] [CrossRef]
- Pérez-Ràfols, F.; Larsson, R.; Almqvist, A. Modelling of leakage on metal-to-metal seals. Tribol. Int. 2016, 94, 421–427. [Google Scholar] [CrossRef]
- Nitta, I.; Matsuzaki, Y. Experimental Study of the Performance of Static Seals Based on Measurements of Real Contact Area Using Thin Polycarbonate Films. J. Tribol. 2010, 132, 022202. [Google Scholar] [CrossRef]
- Abid, M.; Nash, D.H. A parametric study of metal-to-metal contact flanges with optimised geometry for safe stress and no-leak conditions. Int. J. Press. Vessel. Pip. 2004, 81, 67–74. [Google Scholar] [CrossRef]
- Murtagian, G.R.; Fanelli, V.; Villasante, J.A.; Johnson, D.H.; Ernst, H.A. Sealability of Stationary Metal-to-Metal Seals. J. Tribol. 2004, 126, 591–596. [Google Scholar] [CrossRef]
- Ledoux, Y.; Lasseux, D.; Favreliere, H.; Samper, S.; Grandjean, J. On the dependence of static flat seal efficiency to surface defects. Int. J. Press. Vessel. Pip. 2011, 88, 518–529. [Google Scholar] [CrossRef]
- Shao, Y.; Yin, Y.; Du, S.; Xi, L. A Surface Connectivity-Based Approach for Leakage Channel Prediction in Static Sealing Interface. J. Tribol. 2019, 141, 062201. [Google Scholar] [CrossRef]
- Zhang, Q.; Chen, X.; Huang, Y.; Zhang, X. An Experimental Study of the Leakage Mechanism in Static Seals. Appl. Sci. 2018, 8, 1404. [Google Scholar] [CrossRef]
- Zhao, M.J.; Zhu, P.C.; Li, Z.; Liu, Z.; Kang, C. Stress analysis of self-tightness metal sealing against ultrahigh pressure medium. Strength Mater. 2022, 54, 108–116. [Google Scholar] [CrossRef]
- Van Rensselar, J. Introduction to static seals. Tribol. Lubr. Technol. 2017, 73, 38–44. [Google Scholar]
- Shao, Y.; Yin, Y.; Du, S.; Xia, T.; Xi, L. Leakage Monitoring in Static Sealing Interface Based on Three Dimensional Surface Topography Indicator. J. Manuf. Sci. Eng. 2018, 140, 101003. [Google Scholar] [CrossRef]
- Li, X.; Peng, G. Research on leakage prediction calculation method for static seal ring in underground equipments. J. Mech. Sci. Technol. 2016, 30, 2635–2641. [Google Scholar] [CrossRef]
- Liao, C.; Xu, X.; Fang, H.; Wang, H.; Man, M. A leakage model of metallic static seals based on micromorphology characteristics of turning flange surface. Ind. Lubr. Tribol. 2015, 67, 572–581. [Google Scholar] [CrossRef]
- Arzanfudi, M.M.; Al-Khoury, R.; Sluys, L.J. A computational model for fluid leakage in heterogeneous layered porous media. Adv. Water Resour. 2014, 73, 214–226. [Google Scholar] [CrossRef]
- Lin, X.; Du, Z.; Rana, M.A. Study on Leakage Model of Typical Penetration of Closed Structures Based on Porous Media Seepage Theory. Math. Probl. Eng. 2022, 2022, 6901534. [Google Scholar] [CrossRef]
- Wen, T.; Guo, F.; Huang, Y.; Zhu, S.; Jia, X. Analysis of static sealing rules of foamed silicone rubber based on a porous media model. Cell. Polym. 2019, 39, 101–116. [Google Scholar] [CrossRef]
- Jolly, P.; Marchand, L. Leakage Predictions for Static Gasket Based on the Porous Media Theory. J. Press. Vessel Technol. 2009, 131, 021203. [Google Scholar] [CrossRef]
- Marie, C.; Lasseux, D. Experimental Leak-Rate Measurement Through a Static Metal Seal. J. Fluids Eng. 2007, 129, 799–805. [Google Scholar] [CrossRef]
- Beghini, M.; Bertini, L.; Santus, C.; Guglielmo, A.; Mariotti, G. Partially open crack model for leakage pressure analysis of bolted metal-to-metal flange. Eng. Fract. Mech. 2015, 144, 16–31. [Google Scholar] [CrossRef]
- Kambhammettu, S.K.S.; Deshpande, A.P.; Chebolu, L.R. A Compressible Porous Media Model to Estimate Fluid Leak Through a Metal-Elastomer Interface. Transp. Porous Media 2021, 136, 191–215. [Google Scholar] [CrossRef]
- Pérez-Ràfols, F.; Larsson, R.; van Riet, E.J.; Almqvist, A. On the loading and unloading of metal-to-metal seals: A two-scale stochastic approach. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2018, 232, 1525–1537. [Google Scholar] [CrossRef]
- Robbe-Valloire, F.; Prat, M. A model for face-turned surface microgeometry. Wear 2008, 264, 980–989. [Google Scholar] [CrossRef]
- Greenwood, J.A.; Williamson, J.B.P. Contact of nominally flat surfaces. Proc. R. Soc. London Ser. A Math. Phys. Sci. 1966, 295, 300–319. [Google Scholar] [CrossRef]
- Zhao, G.; Li, S.-x.; Xiong, Z.-l.; Gao, W.-d.; Han, Q.-k. A statistical model of elastic-plastic contact between rough surfaces. Trans. Can. Soc. Mech. Eng. 2019, 43, 38–46. [Google Scholar] [CrossRef]
- Jackson, R.L.; Streator, J.L. A multi-scale model for contact between rough surfaces. Wear 2006, 261, 1337–1347. [Google Scholar] [CrossRef]
- Majumdar, A.; Bhushan, B. Fractal Model of Elastic-Plastic Contact Between Rough Surfaces. J. Tribol. 1991, 113, 1–11. [Google Scholar] [CrossRef]
- Morag, Y.; Etsion, I. Resolving the contradiction of asperities plastic to elastic mode transition in current contact models of fractal rough surfaces. Wear 2007, 262, 624–629. [Google Scholar] [CrossRef]
- Komvopoulos, K.; Ye, N. Three-Dimensional Contact Analysis of Elastic-Plastic Layered Media With Fractal Surface Topographies. J. Tribol. 2001, 123, 632–640. [Google Scholar] [CrossRef]
- Yuan, Y.; Cheng, Y.; Liu, K.; Gan, L. A revised Majumdar and Bushan model of elastoplastic contact between rough surfaces. Appl. Surf. Sci. 2017, 425, 1138–1157. [Google Scholar] [CrossRef]
- Vallet, C.; Lasseux, D.; Sainsot, P.; Zahouani, H. Real versus synthesized fractal surfaces: Contact mechanics and transport properties. Tribol. Int. 2009, 42, 250–259. [Google Scholar] [CrossRef]
- Etsion, I.; Front, I. A model for static sealing performance of end face seals. Tribol. Trans. 1994, 37, 111–119. [Google Scholar] [CrossRef]
- Sahlin, F.; Larsson, R.; Almqvist, A.; Lugt, P.M.; Marklund, P. A mixed lubrication model incorporating measured surface topography. Part 1: Theory of flow factors. Proc. Inst. Mech. Eng. Part J-J. Eng. Tribol. 2010, 224, 335–351. [Google Scholar] [CrossRef]
- Sahlin, F.; Larsoon, R.; Marklund, P.; Almqvist, A.; Lugt, P.M. A mixed lubrication model incorporating measured surface topography. Part 2: Roughness treatment, model validation, and simulation. Proc. Inst. Mech. Eng. Part J-J. Eng. Tribol. 2009, 224, 353–365. [Google Scholar] [CrossRef]
- Bottiglione, F.; Carbone, G.; Mangialardi, L.; Mantriota, G. Leakage mechanism in flat seals. J. Appl. Phys. 2009, 106, 104902. [Google Scholar] [CrossRef]
- Bottiglione, F.; Carbone, G.; Mantriota, G. Fluid leakage in seals: An approach based on percolation theory. Tribol. Int. 2009, 42, 731–737. [Google Scholar] [CrossRef]
- Sun, J.; Ma, C.; Lu, J.; Yu, Q. A leakage channel model for sealing interface of mechanical face seals based on percolation theory. Tribol. Int. 2018, 118, 108–119. [Google Scholar] [CrossRef]
- Ni, X.; Ma, C.; Sun, J.; Zhang, Y.; Yu, Q. A Leakage Model of Contact Mechanical Seals Based on the Fractal Theory of Porous Medium. Coatings 2020, 11, 20. [Google Scholar] [CrossRef]
- Liao, C.; Chen, H.; Lu, H.; Dong, R.; Sun, H.; Chang, X. A leakage model for a seal-on-seal structure based on porous media method. Int. J. Press. Vessel. Pip. 2020, 188, 104227. [Google Scholar] [CrossRef]
- Liu, Y.; Guo, H.; Chen, Z.; Ding, K.; Dan, M.; Li, B.; Yan, F. A Fractal Contact Model for Rough Surfaces considering the Variation of Critical Asperity Levels. Adv. Mater. Sci. Eng. 2022, 2022, 2985674. [Google Scholar] [CrossRef]
- Yu, B.; Li, J. Some Fractal Characters of Porous Media. Fractals 2001, 09, 365–372. [Google Scholar] [CrossRef]
- Yu, B.; Ping, C. A fractal permeability model for bi-dispersed porous media. Int. J. Heat Mass Transf. 2002, 45, 2983–2993. [Google Scholar] [CrossRef]
- Dapp, W.B.; Lucke, A.; Persson, B.N.; Muser, M.H. Self-affine elastic contacts: Percolation and leakage. Phys. Rev. Lett. 2012, 108, 244301. [Google Scholar] [CrossRef]
- Chen, Z.; Liu, Y.; Zhou, P. A comparative study of fractal dimension calculation methods for rough surface profiles. Chaos Solitons Fractals 2018, 112, 24–30. [Google Scholar] [CrossRef]
- Majumdar, A.; Tien, C.L. Fractal characterization and simulation of rough surfaces. Wear 1990, 136, 313–327. [Google Scholar] [CrossRef]
- Majumdar, A.; Bhushn, B. Role of Fractal Geometry in Roughness Characterization and Contact Mechanics of Surfaces. J. Tribol. 1990, 112, 205–216. [Google Scholar] [CrossRef]
- Yu, B.M.; Xu, P.; Zou, M.Q.; Cai, J.C.; Zheng, Q. Transport Physics of Fractal Porous Media; Science Press: Beijing, China, 2014. [Google Scholar]
- Yuan, Y.; Yang, B.; Xiao, Z.; Liu, X. Numerical and Experimental Fractal Pore Network Study on the Drying of Porous Media. In Proceedings of the 5th Asia-Pacific Drying Conference, Hong Kong, China, 13–15 August 2007. [Google Scholar]
- Yang, S.; Fu, H.; Yu, B. Fractal Analysis of Flow Resistance in Tree-Like Branching Networks with Roughened Microchannels. Fractals 2017, 25, 1750008. [Google Scholar] [CrossRef]
- Wheatcraft, S.W.; Tyler, S.W. An explanation of scale-dependent dispersivity in heterogeneous aquifers using concepts of fractal geometry. Water Resour. Res. 1988, 24, 566–578. [Google Scholar] [CrossRef]
- Yun, M.; Yu, B.; Xu, P.; Wu, J. Geometrical Models for Tortuosity of Streamlines in Three-Dimensional Porous Media. Can. J. Chem. Eng. 2006, 84, 301–309. [Google Scholar] [CrossRef]
- Patel, H.; Hariharan, H.; Bailey, G.; Jung, G. Advanced Computer Modelling for Metal-to-Metal Seal in API Flanges. In Proceedings of the Society of Petroleum Engineers Annual Technical Conference and Exhibition, Dallas, TX, USA, 7–10 May 2018. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hardness H | Young’s Modulus E/MPa | Tensile Strength/MPa | Poisson’s Ratio | Compressive Strength/MPa | |
|---|---|---|---|---|---|
| 316 L stainless steel | 155–190 | 1.9 × 105–2.1 × 105 | 460–860 | 0.3 | — |
| sapphire | 1570–1750 | 4.4 × 105 | 190 | 0.3 | 2100 |
| Speed/rpm | Advance by Turn/mm | Depth of Cut/mm | Turning Tool/Deg | Tool Radius/mm |
|---|---|---|---|---|
| 12,000 | 0.05 | 0.02 | 45 | 0.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Du, H.; Ren, X.; Li, B.; Qian, J.; Yan, F. A Leakage Rate Model for Metal-to-Metal Seals Based on the Fractal Theory of Porous Medium. Aerospace 2022, 9, 779. https://doi.org/10.3390/aerospace9120779
Liu Y, Du H, Ren X, Li B, Qian J, Yan F. A Leakage Rate Model for Metal-to-Metal Seals Based on the Fractal Theory of Porous Medium. Aerospace. 2022; 9(12):779. https://doi.org/10.3390/aerospace9120779
Chicago/Turabian StyleLiu, Yong, Hao Du, Xinjiang Ren, Baichun Li, Junze Qian, and Fangchao Yan. 2022. "A Leakage Rate Model for Metal-to-Metal Seals Based on the Fractal Theory of Porous Medium" Aerospace 9, no. 12: 779. https://doi.org/10.3390/aerospace9120779
APA StyleLiu, Y., Du, H., Ren, X., Li, B., Qian, J., & Yan, F. (2022). A Leakage Rate Model for Metal-to-Metal Seals Based on the Fractal Theory of Porous Medium. Aerospace, 9(12), 779. https://doi.org/10.3390/aerospace9120779