
Modeling and Simulation of Flight Profile and Power Spectrum for Near-Space Solar-Powered UAV


Abstract
1. Introduction
2. Mathematical Physical Model
2.1. Aerodynamic Model
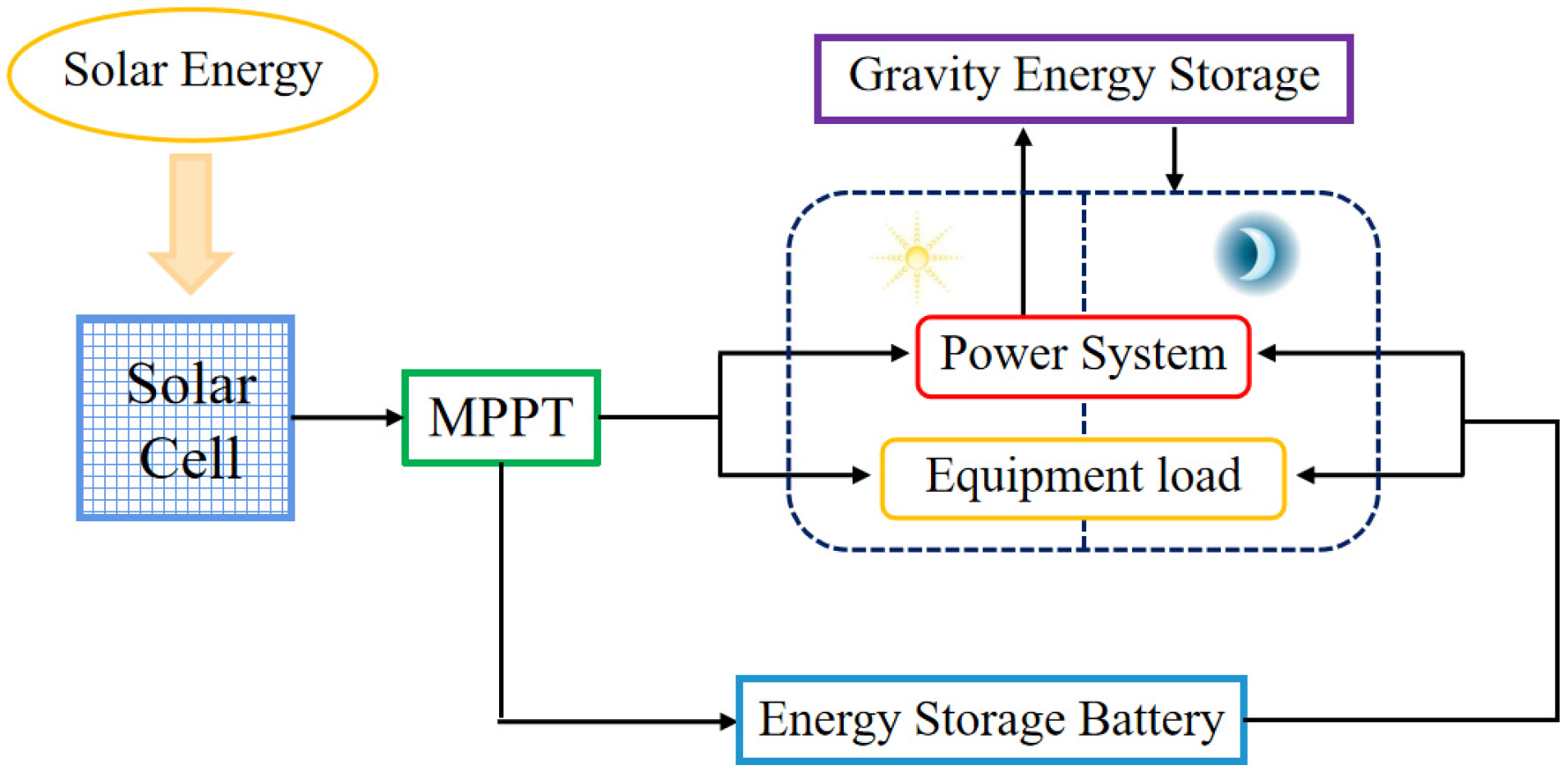
2.2. Energy System Model
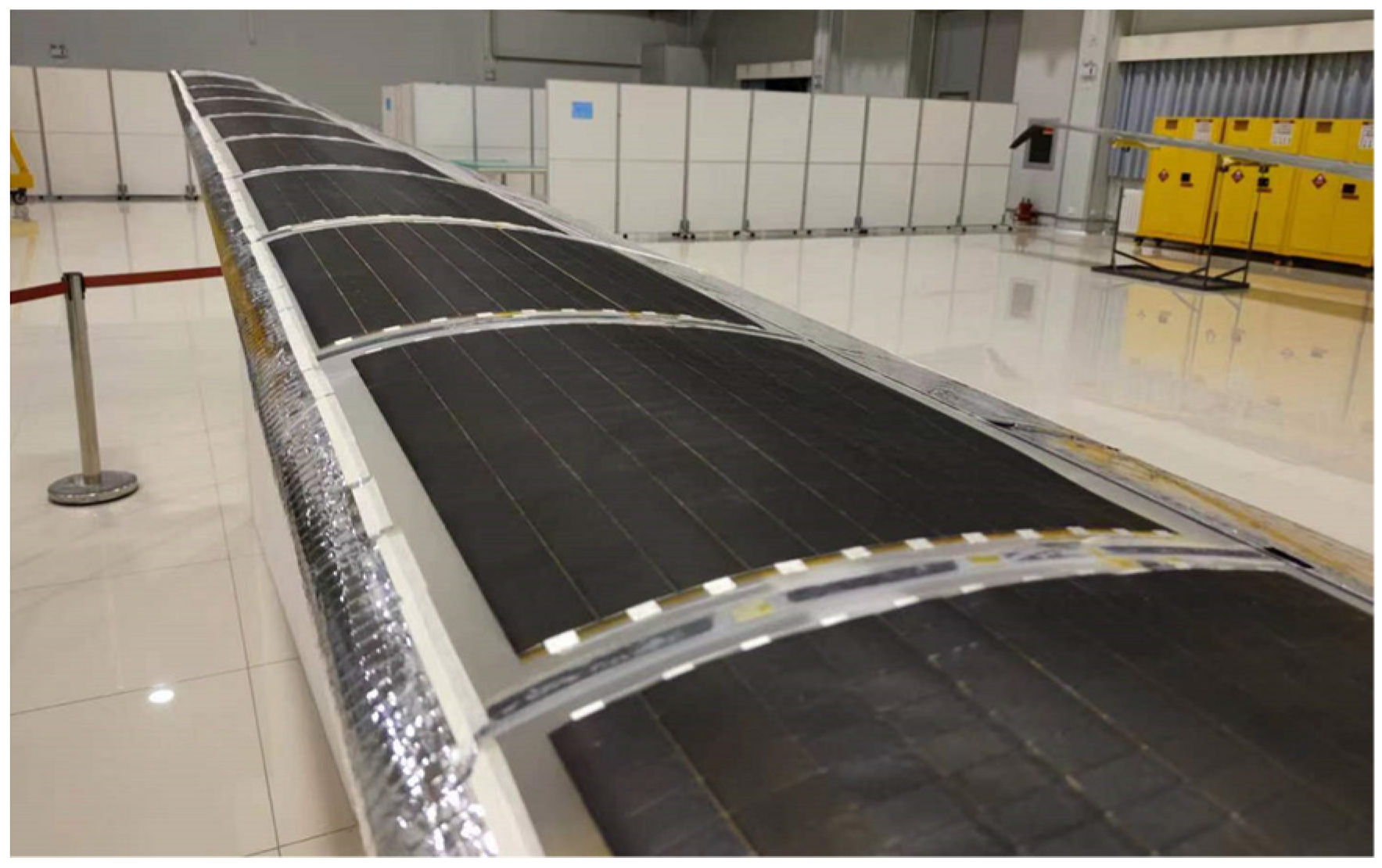
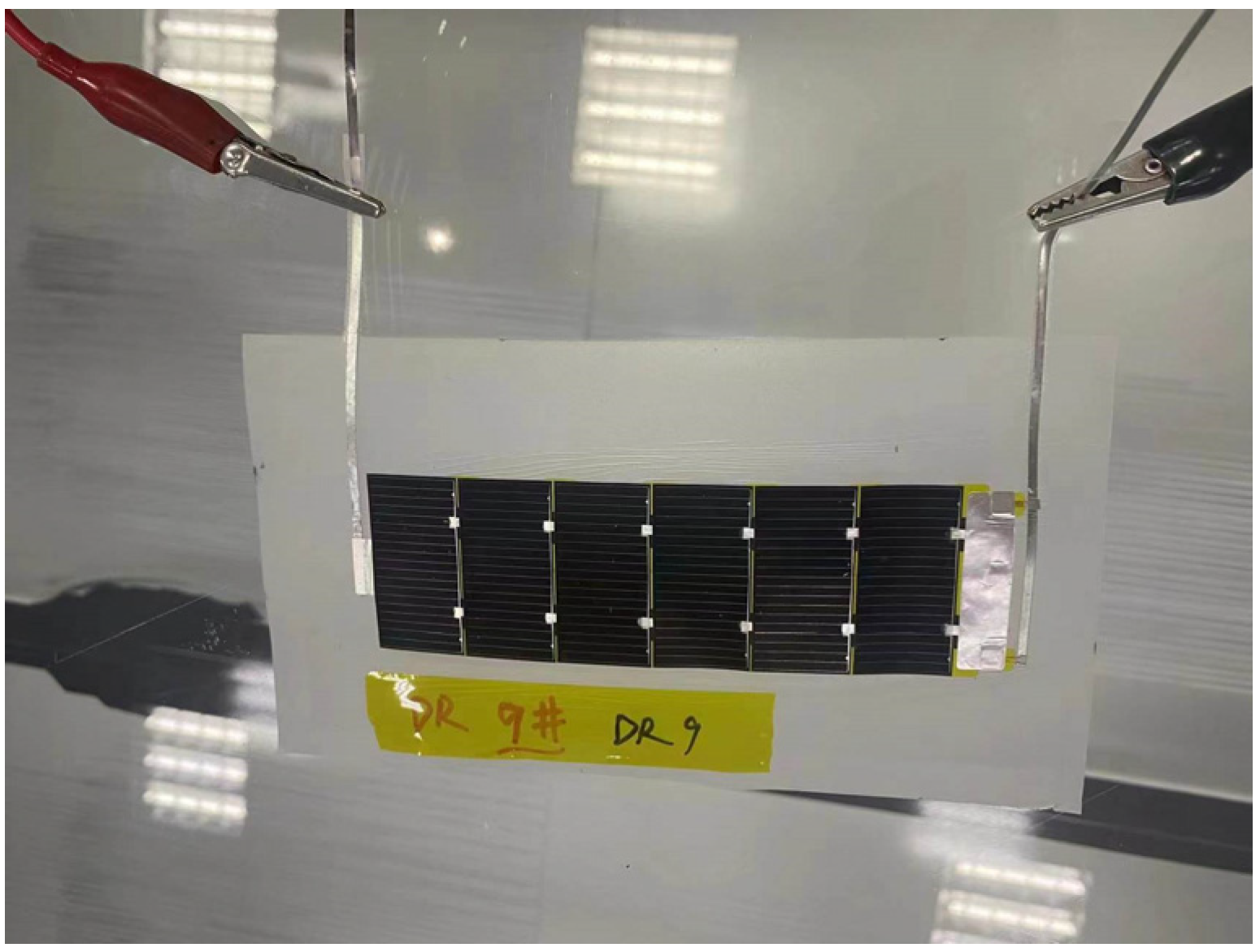
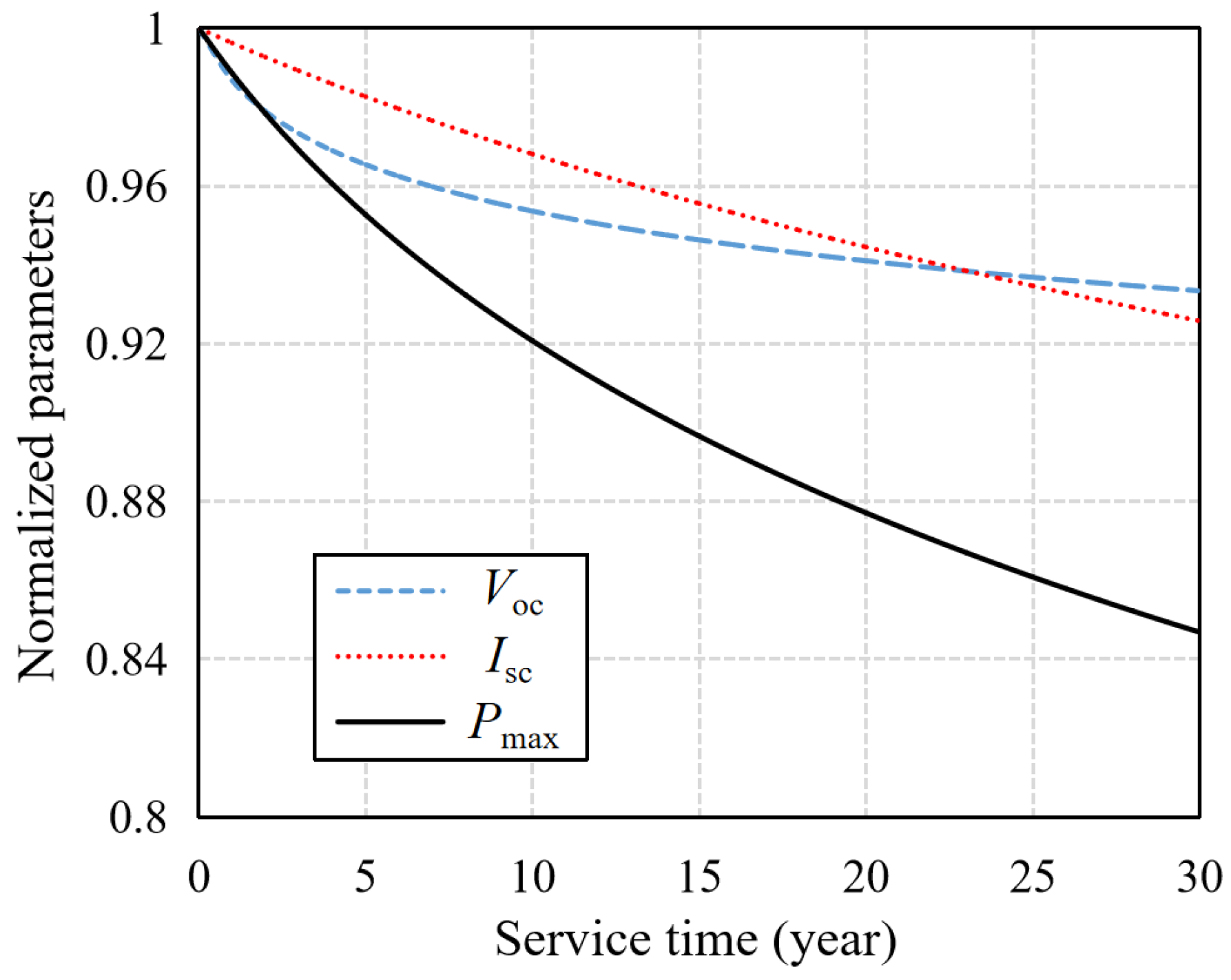
2.2.1. Photovoltaic Cells
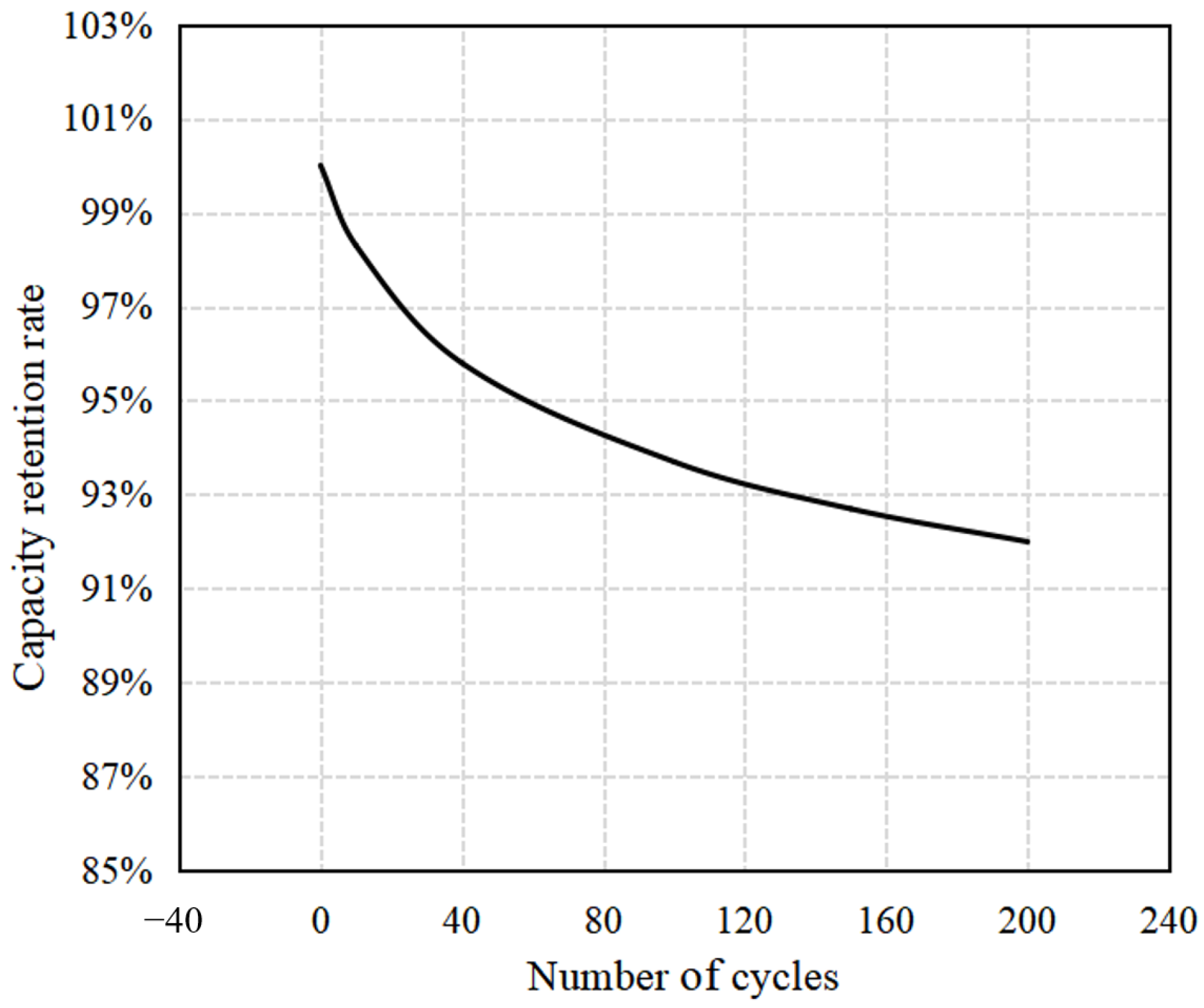
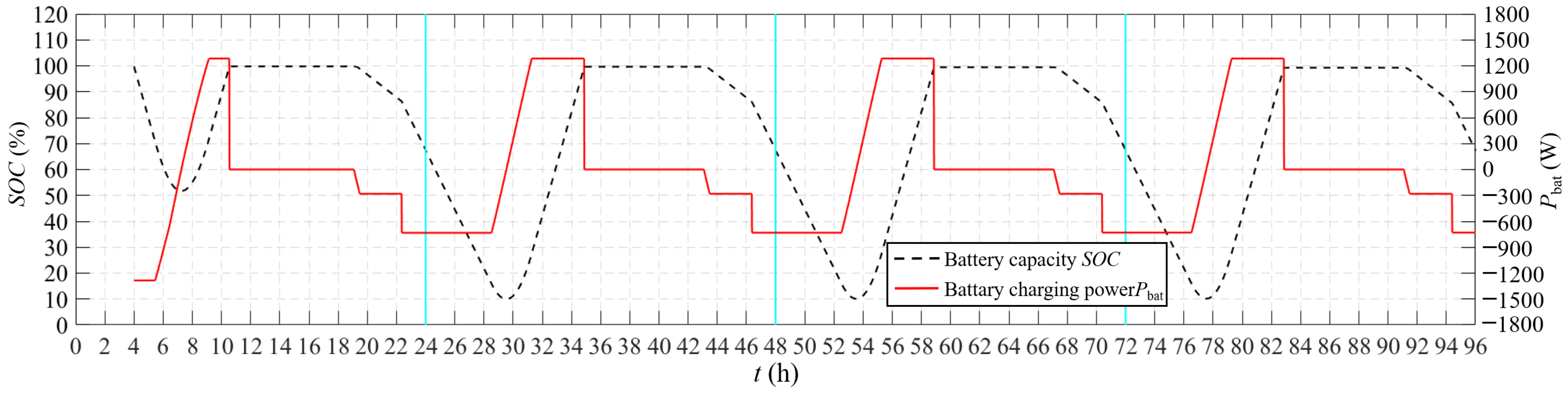
2.2.2. Secondary Battery
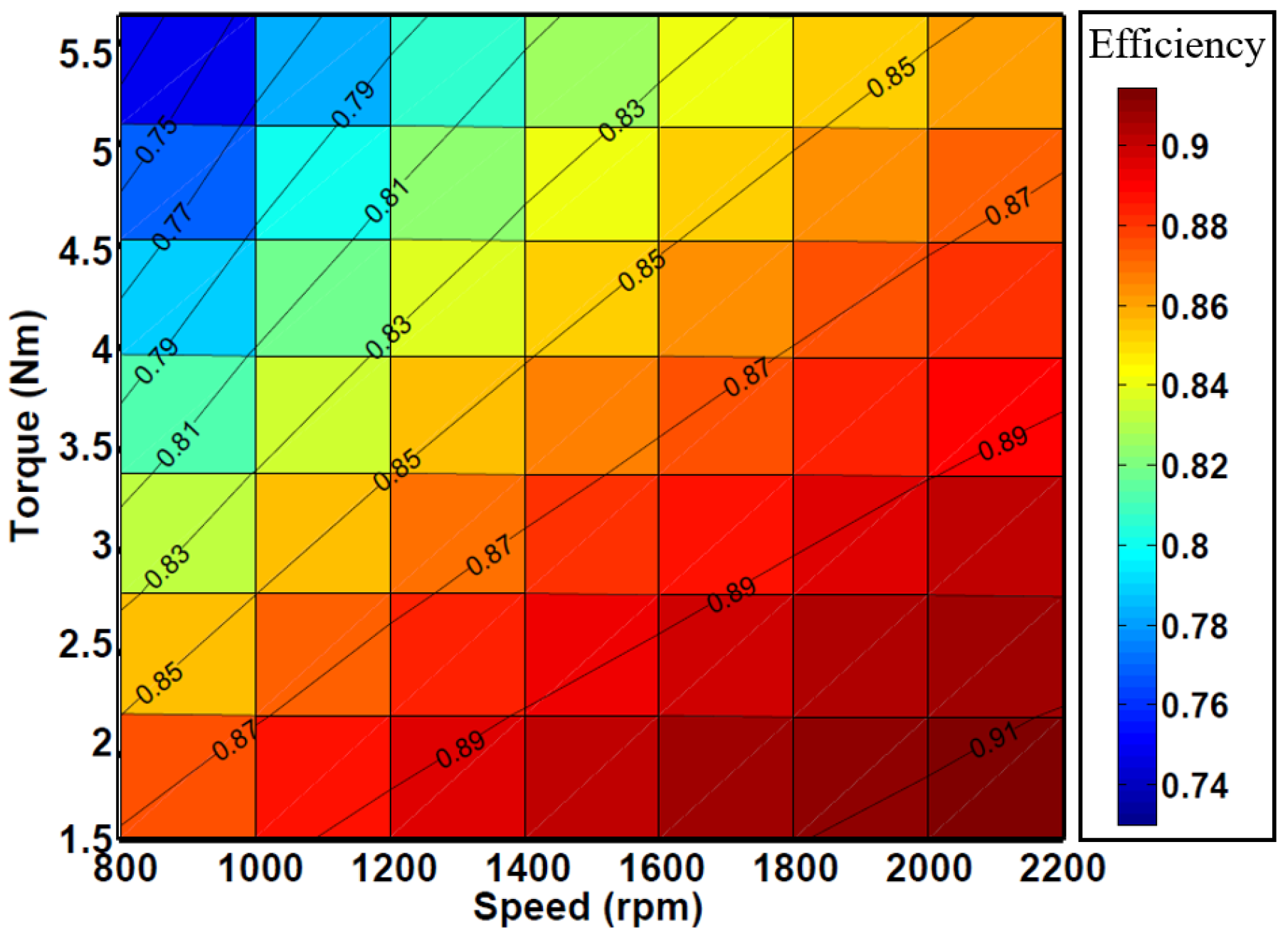
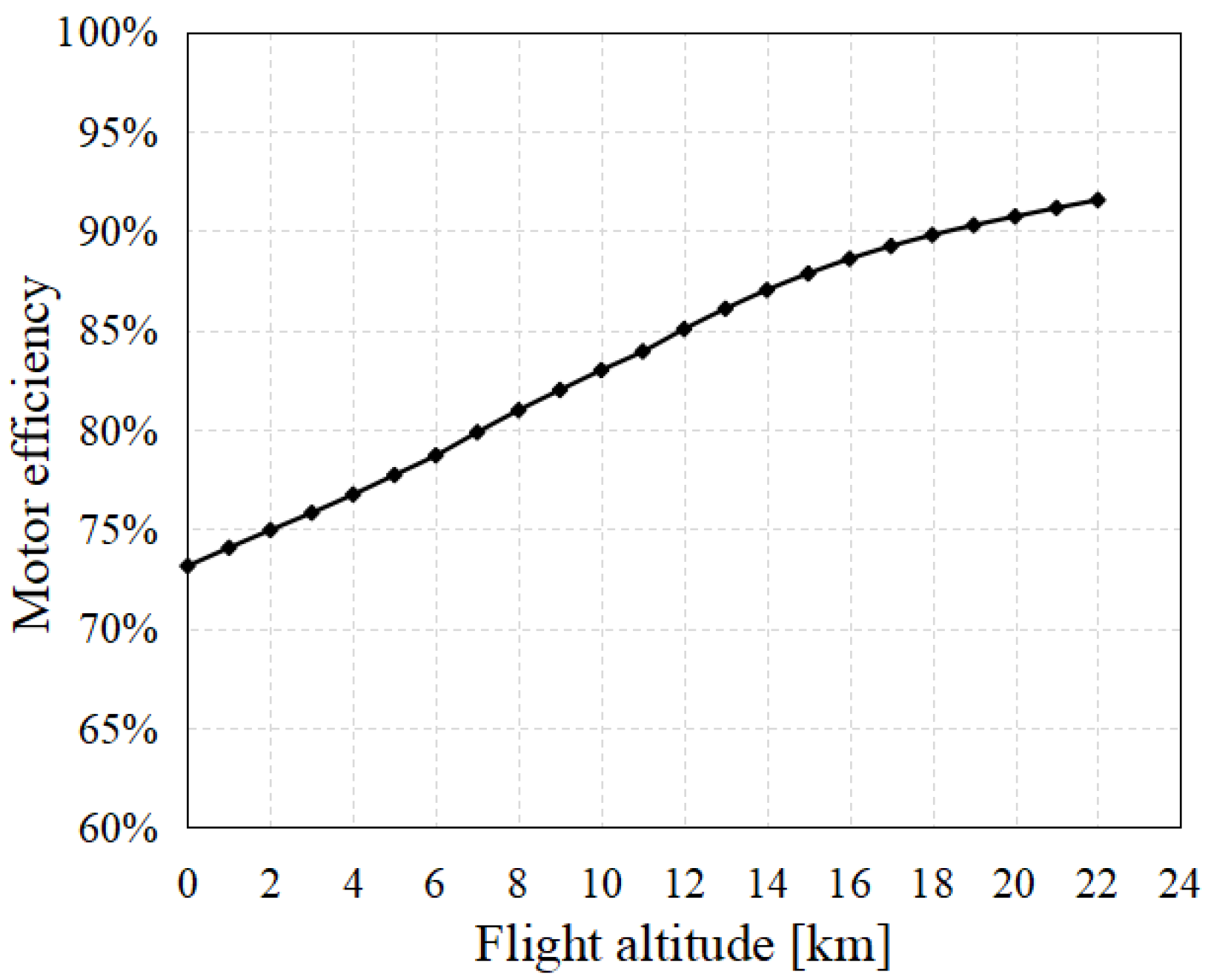
2.3. Dynamic System Model
3. Flight Profile and Power Spectrum Design
3.1. Flight Profile Design
- (a)
- Level flight phase
- (b)
- Climbing phase
- (c)
- Powered gliding phase
- (d)
- Unpowered gliding phase
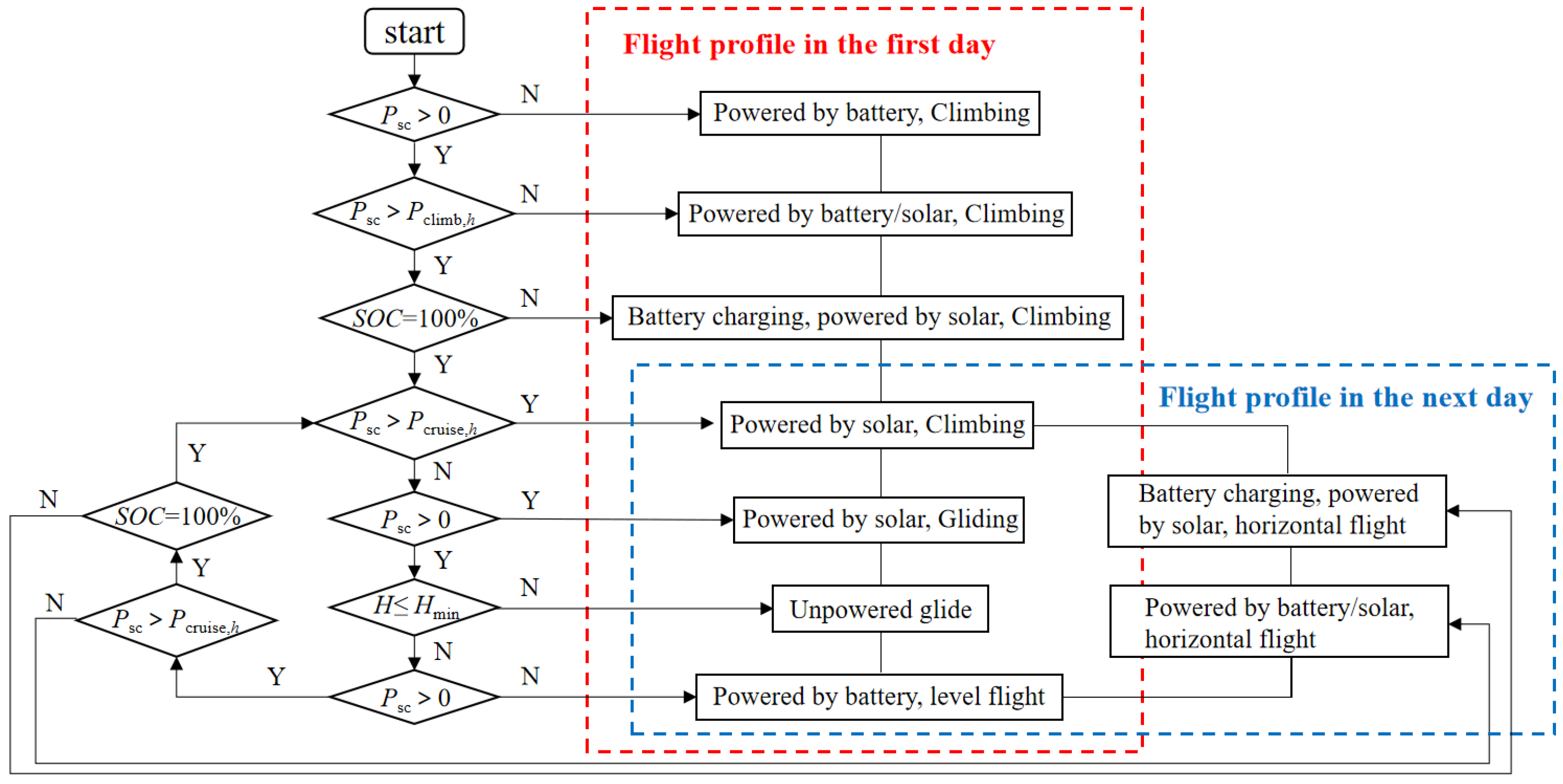
3.2. Flight Strategy
- (1)
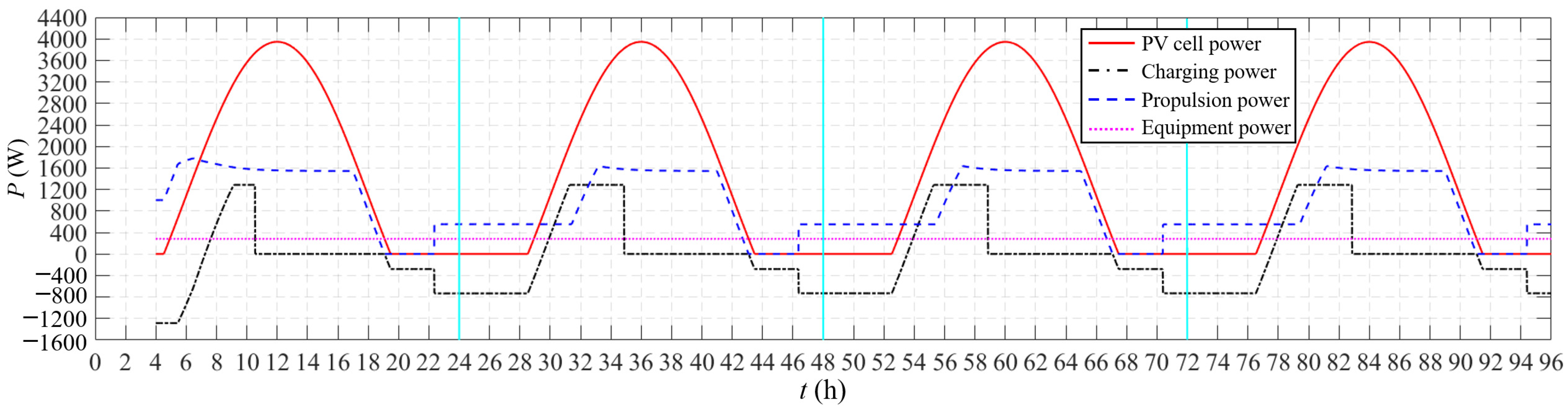
- Maximizes solar energy utilization, which means the UAV will use the solar energy to climb as high as possible before dusk, instead of maintaining level flight after climbing to a certain height;
- (2)
- Tries to avoid cruising in the higher airspace, which means the UAV will use the gravitational potential energy to glide to the night flight altitude at the first time after dusk, instead of starting to slide at a fixed moment.
- (1)
- The remaining capacity of the secondary battery shall not be less than 10%;
- (2)
- Always meet the power demand of airborne equipment (including data link, flight control, navigation, etc.);
- (3)
- The charging and discharging power of each piece of equipment shall not exceed the allowable value.
4. Typical Flight Profile and Power Spectrum
5. Analysis
5.1. Task Indicators
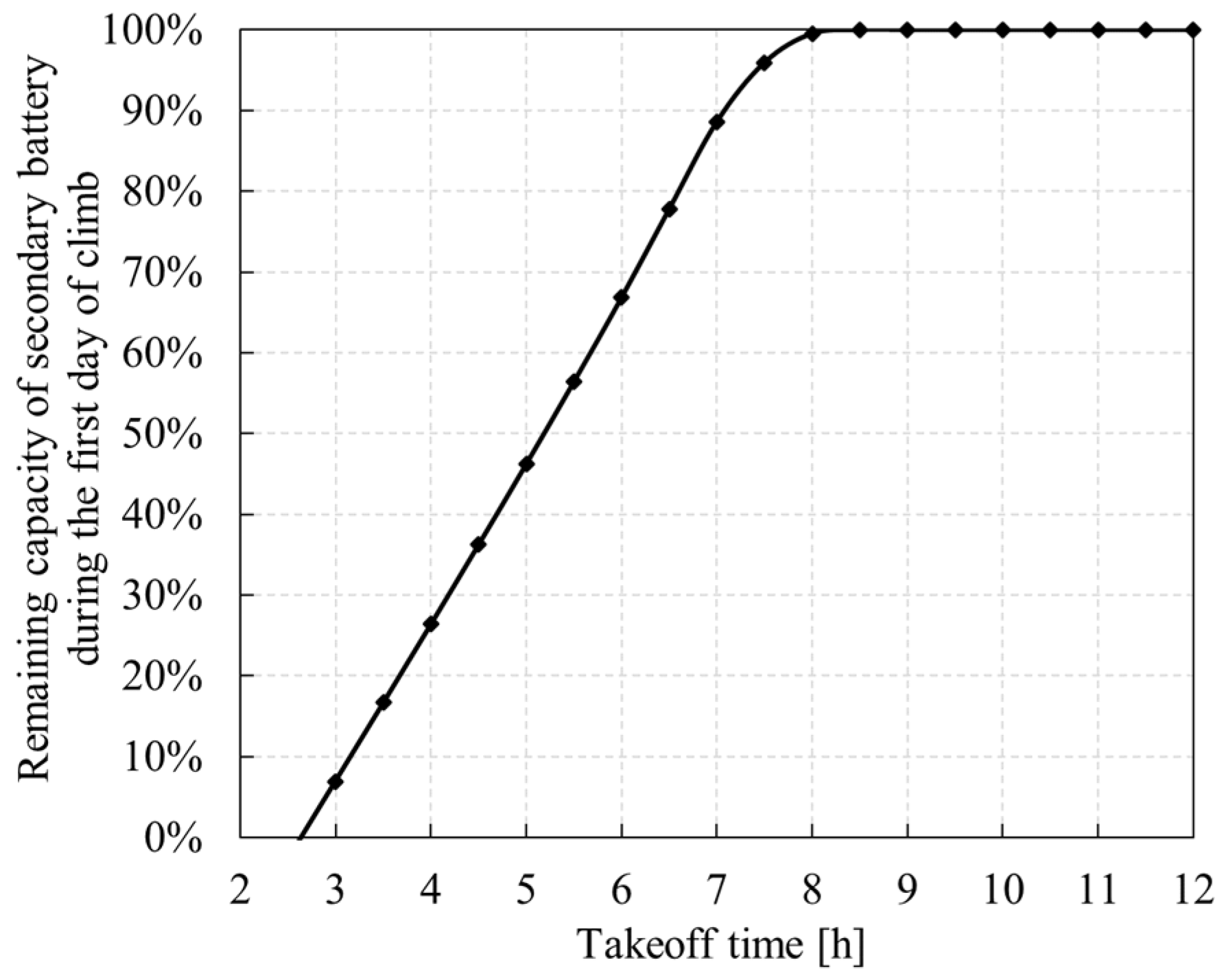
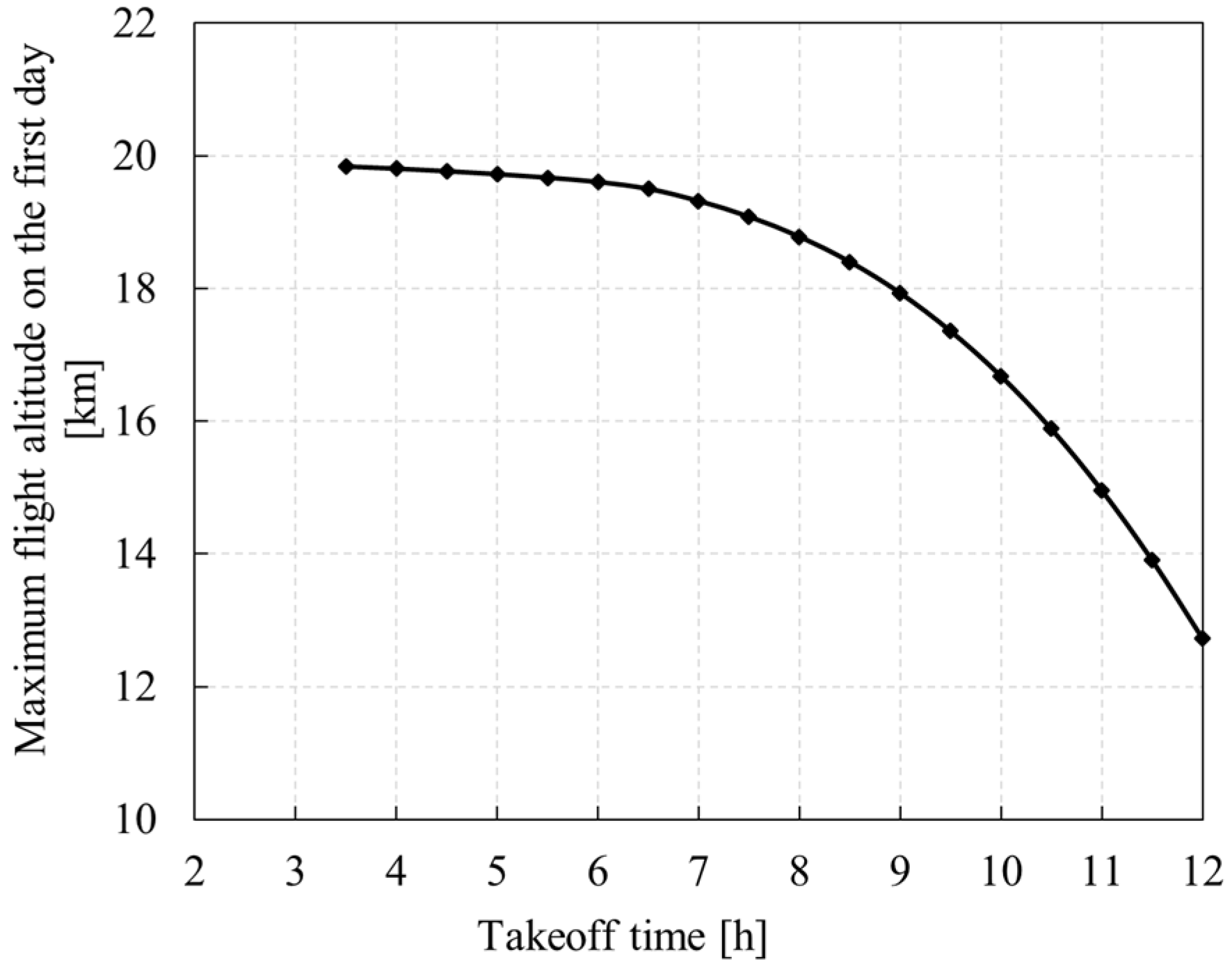
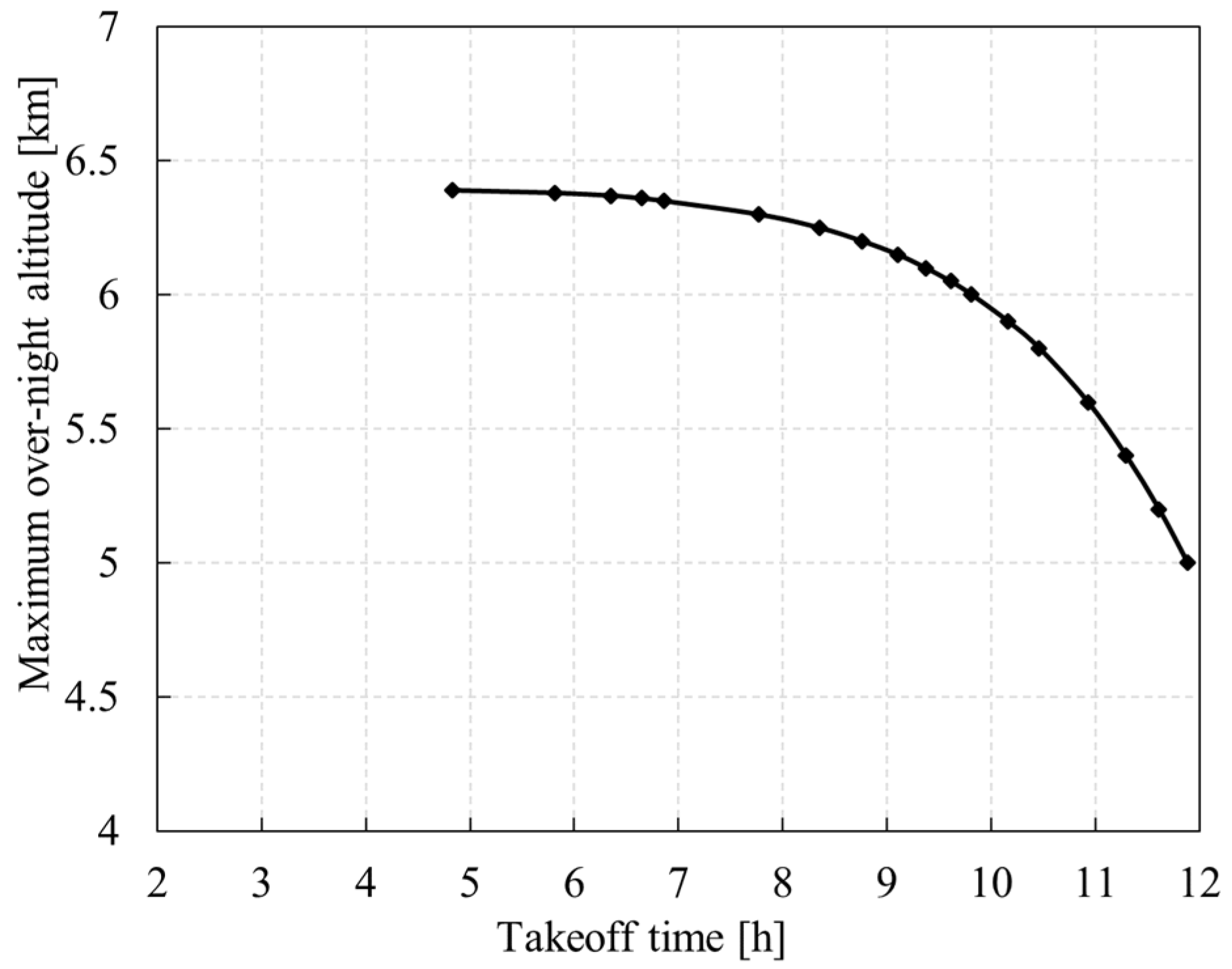
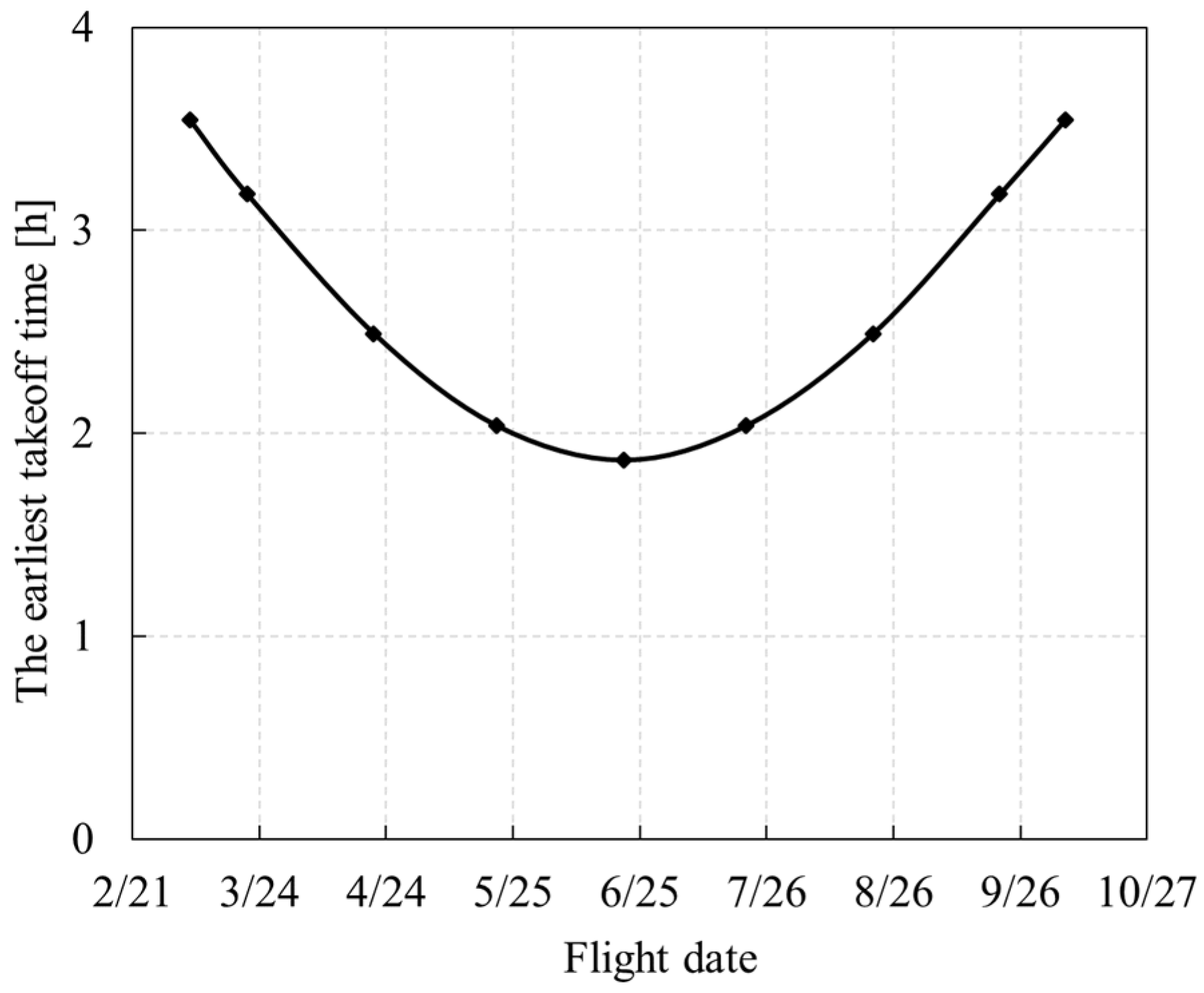
5.1.1. Takeoff Time Window
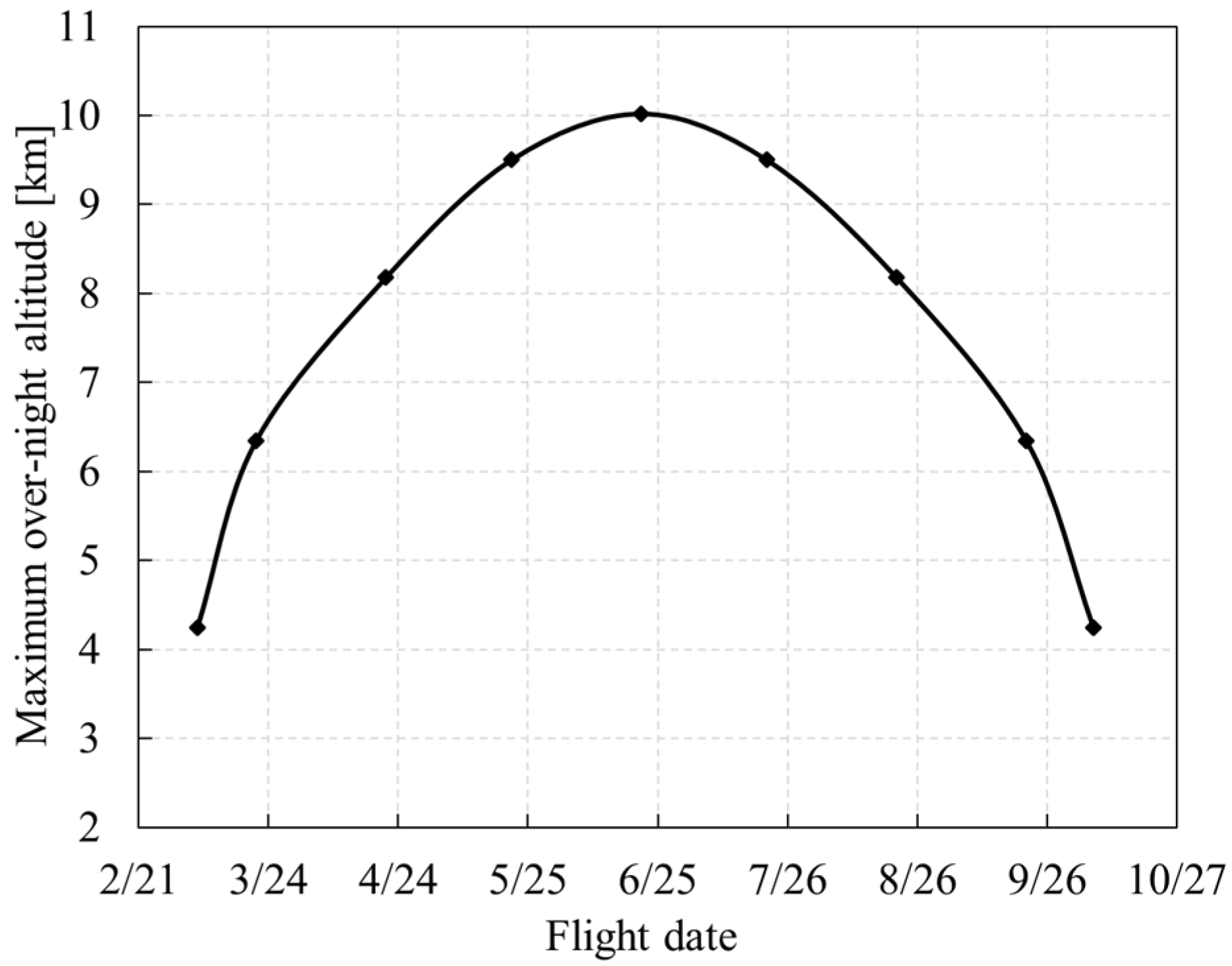
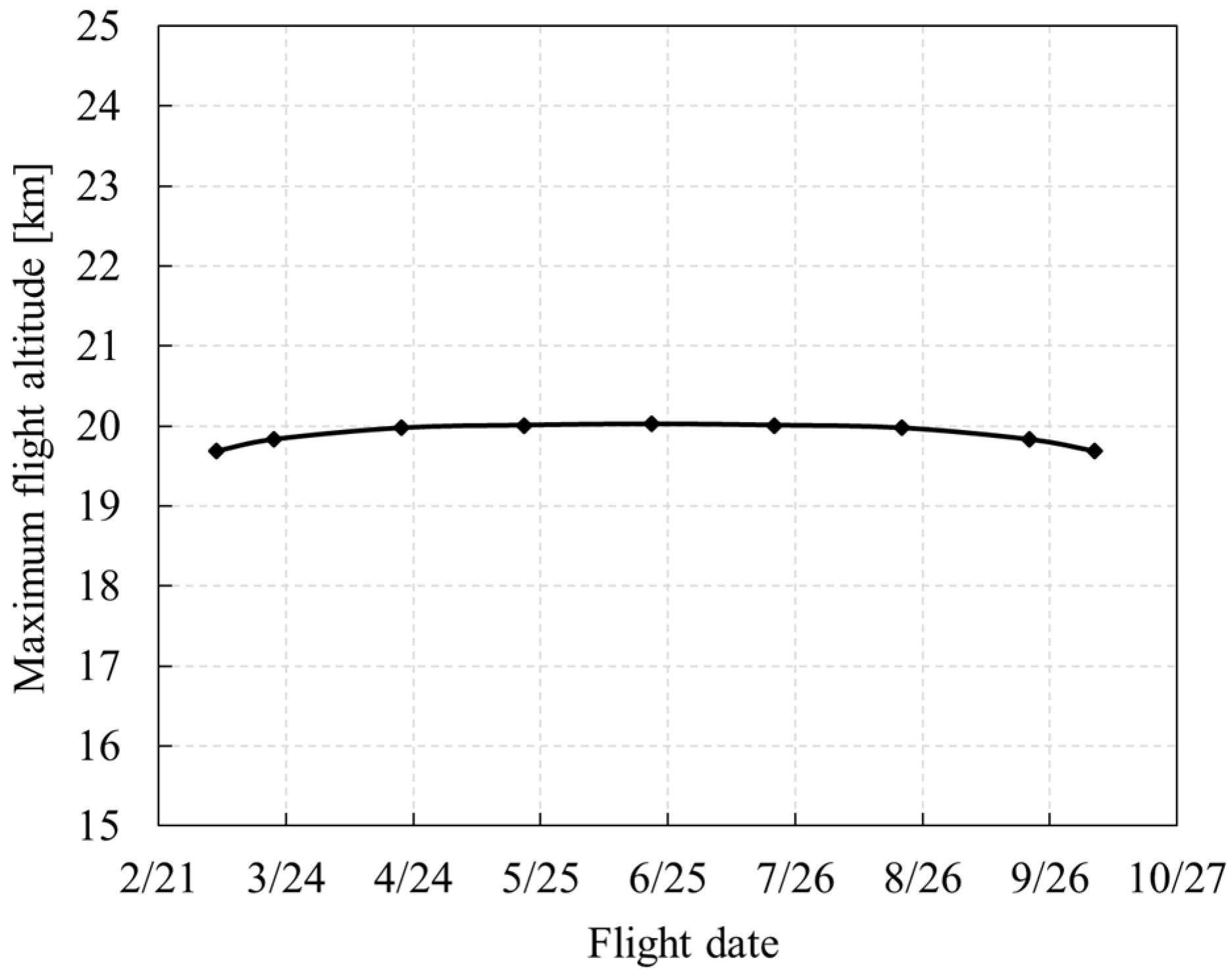
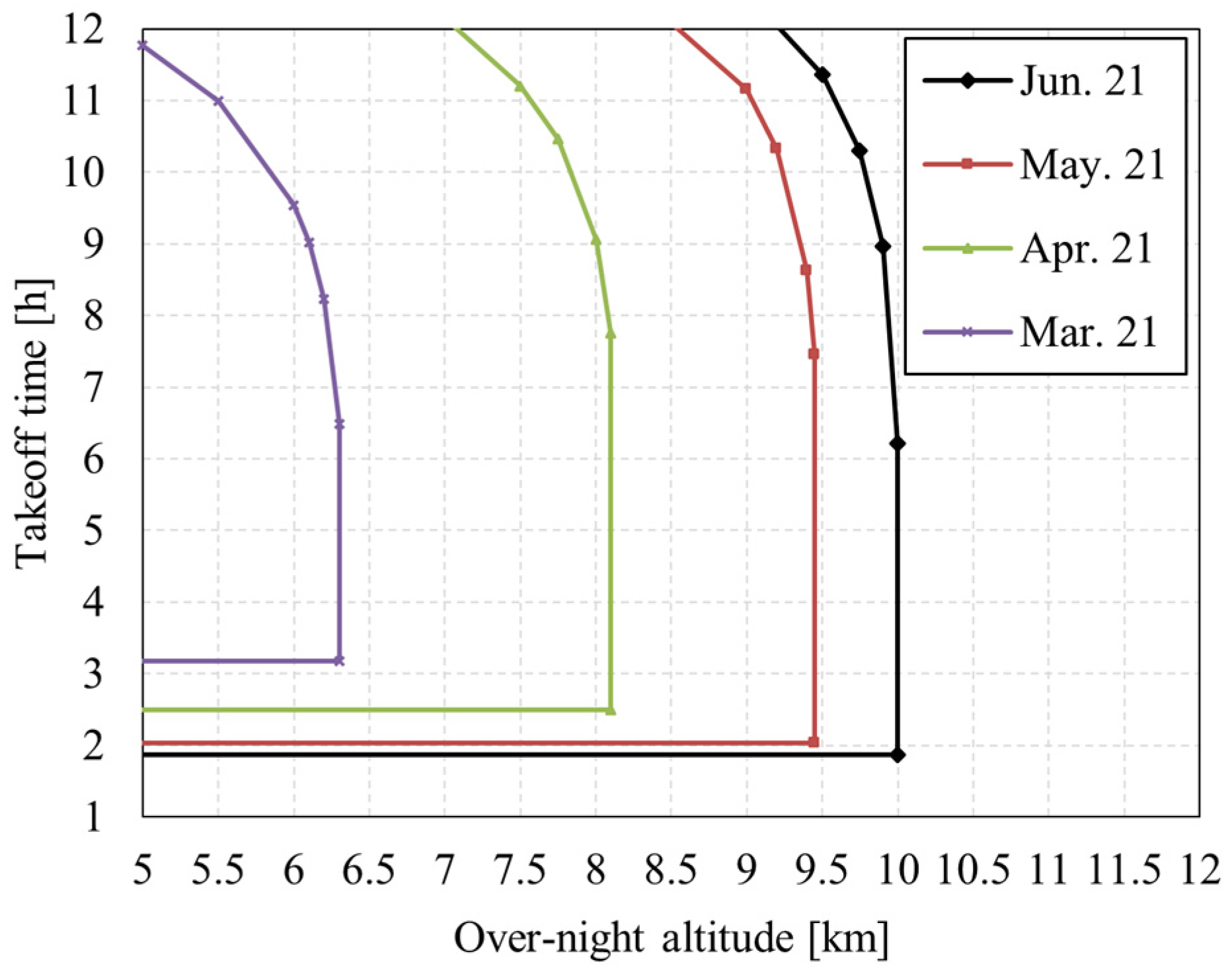
5.1.2. Flying Season
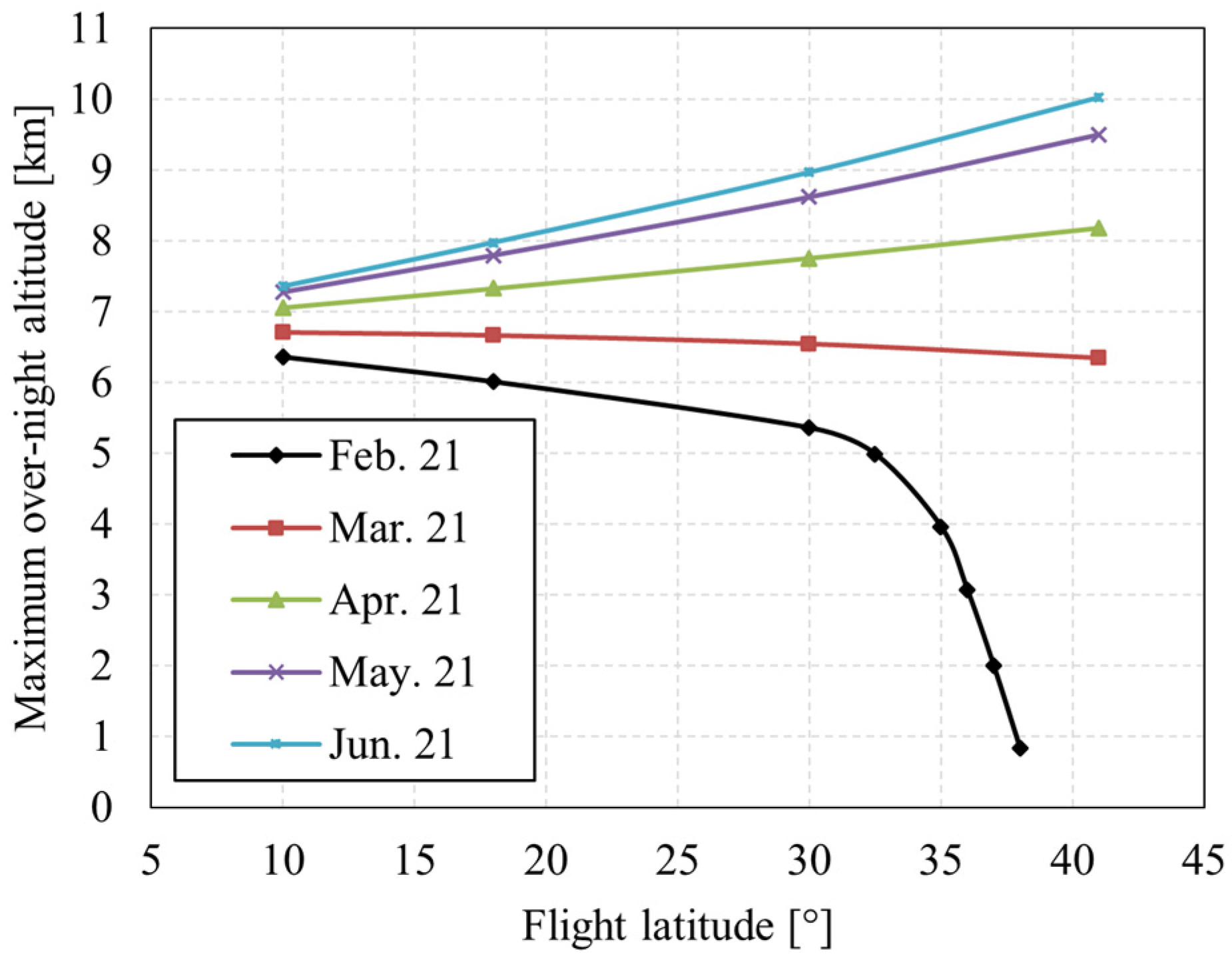
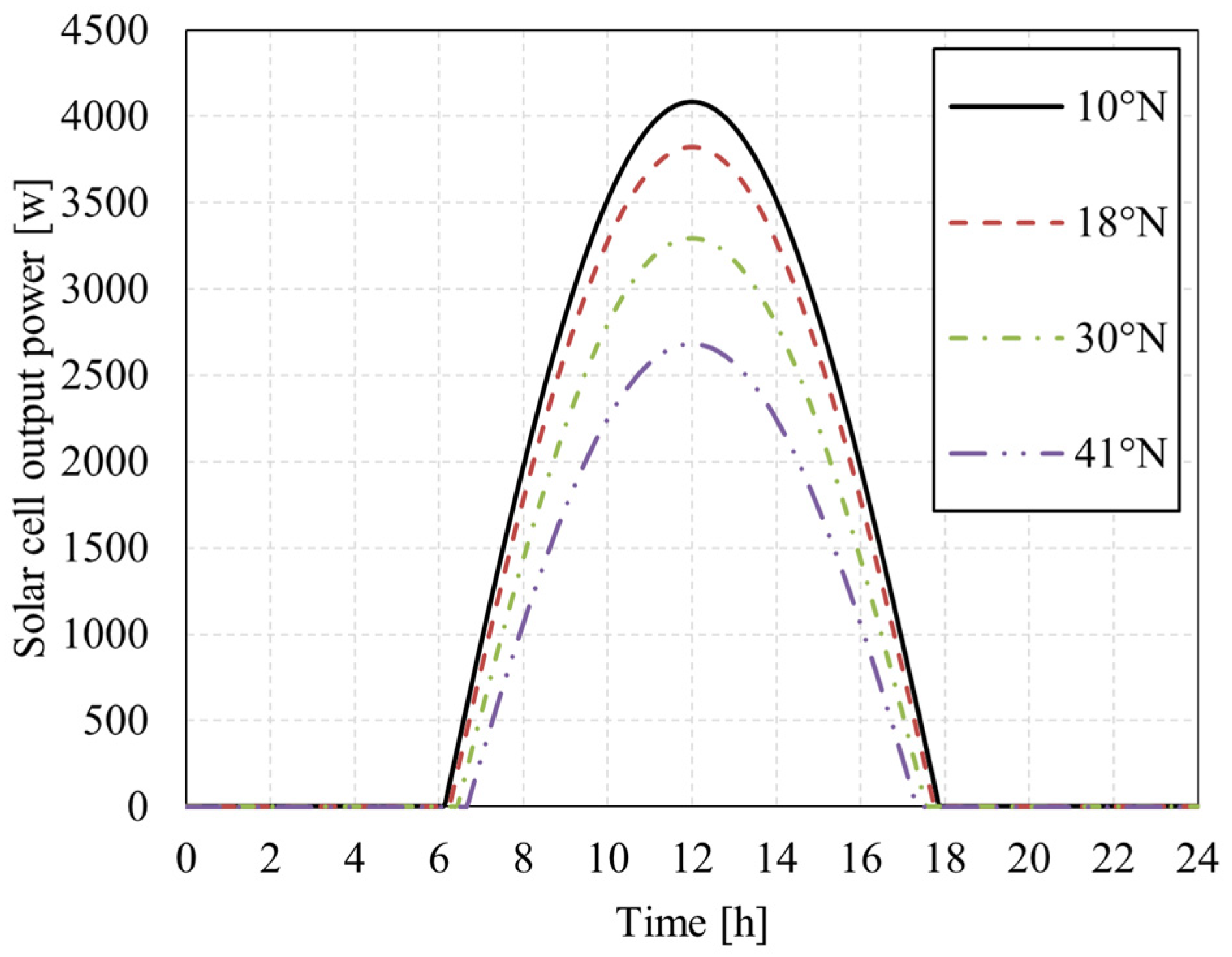
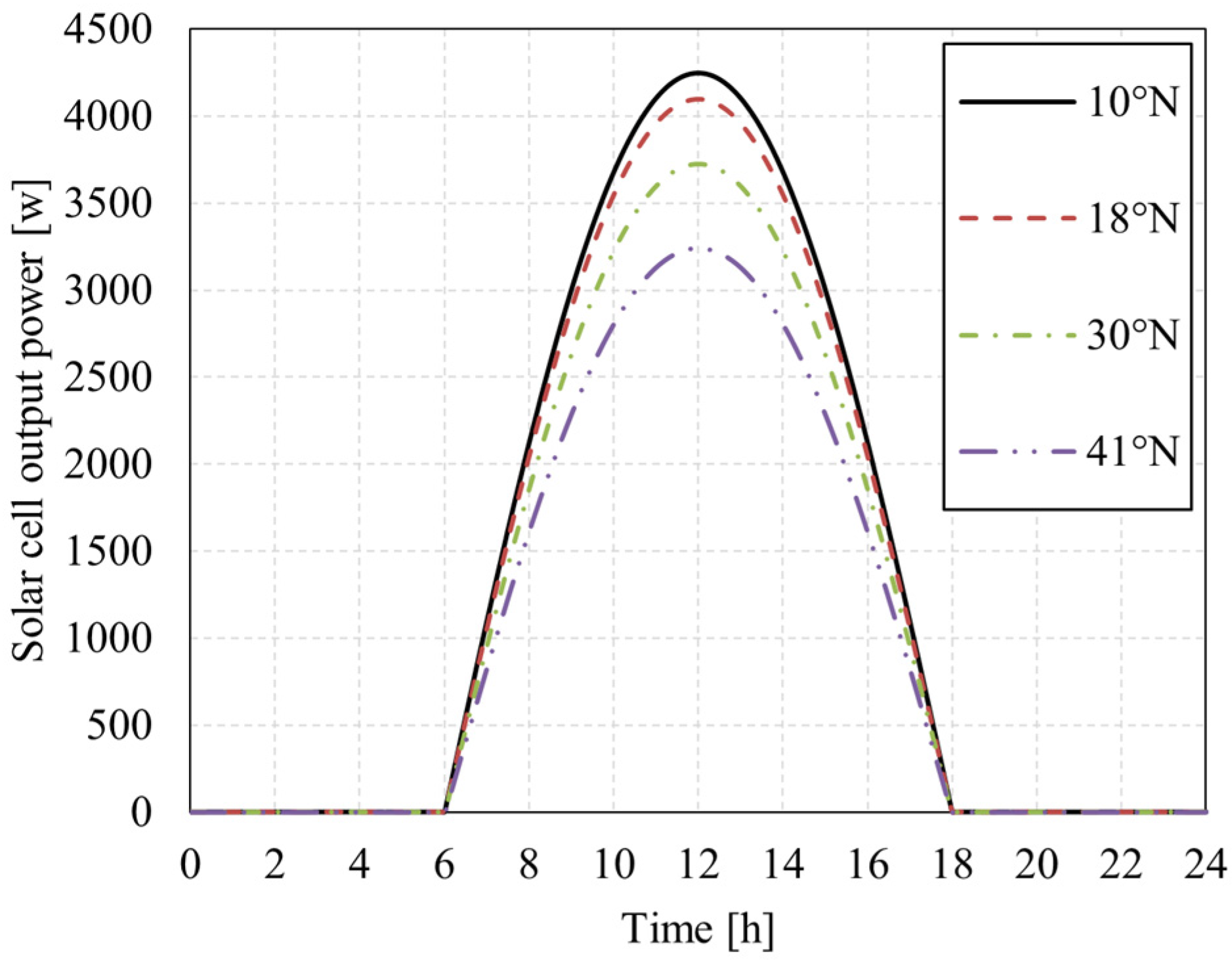
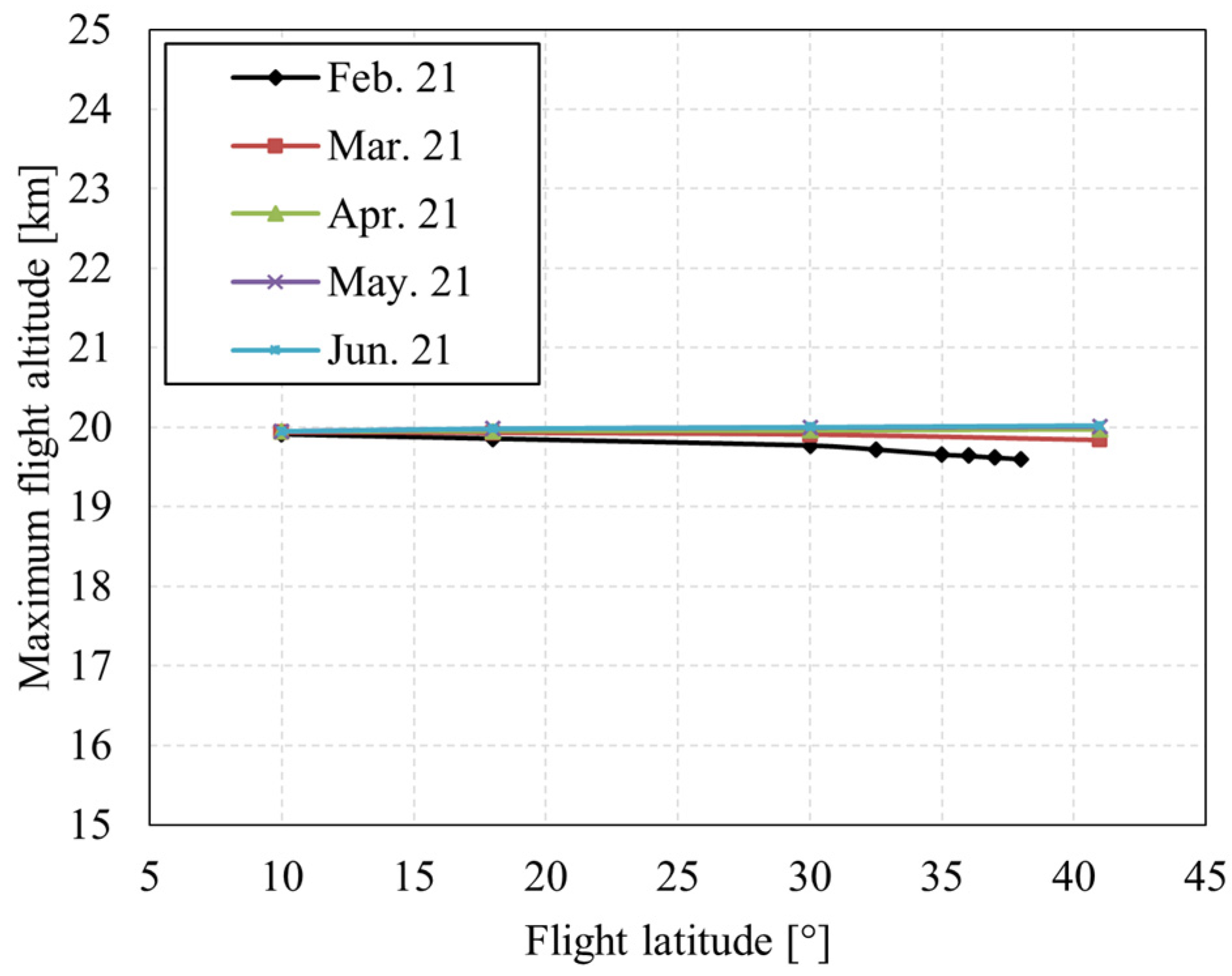
5.1.3. Flight Latitude
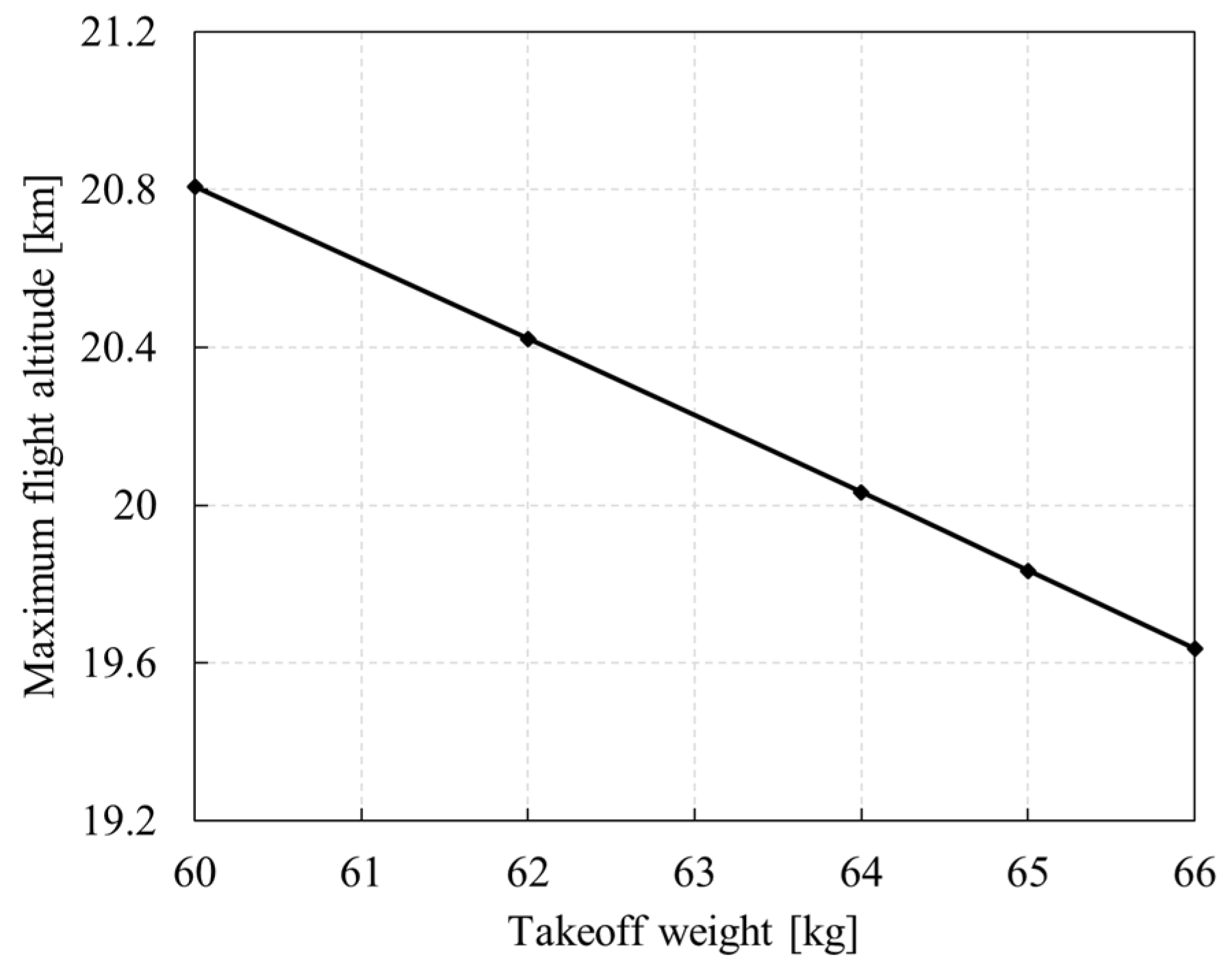
5.1.4. Takeoff Weight
5.2. Performance Indicators
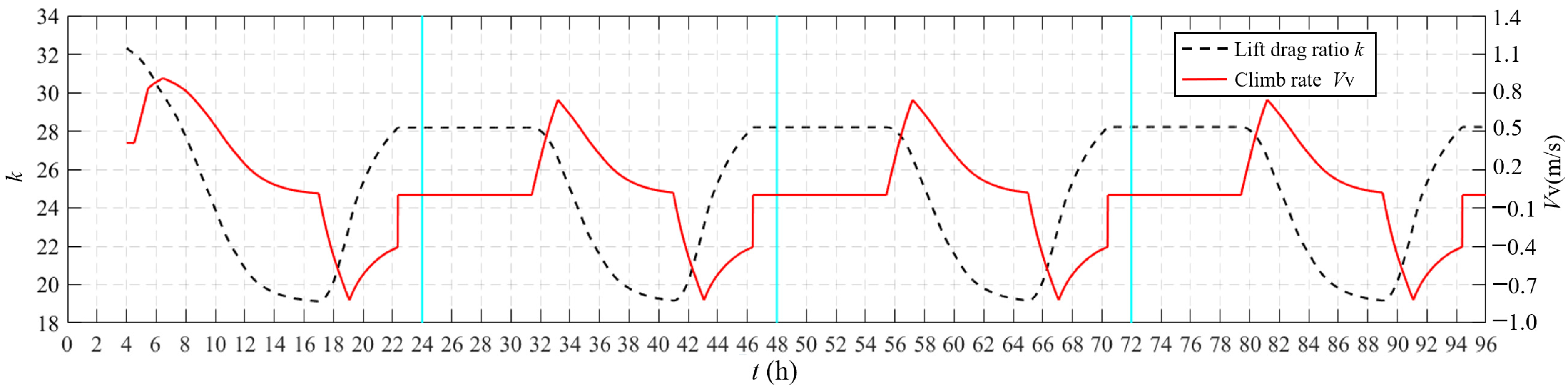
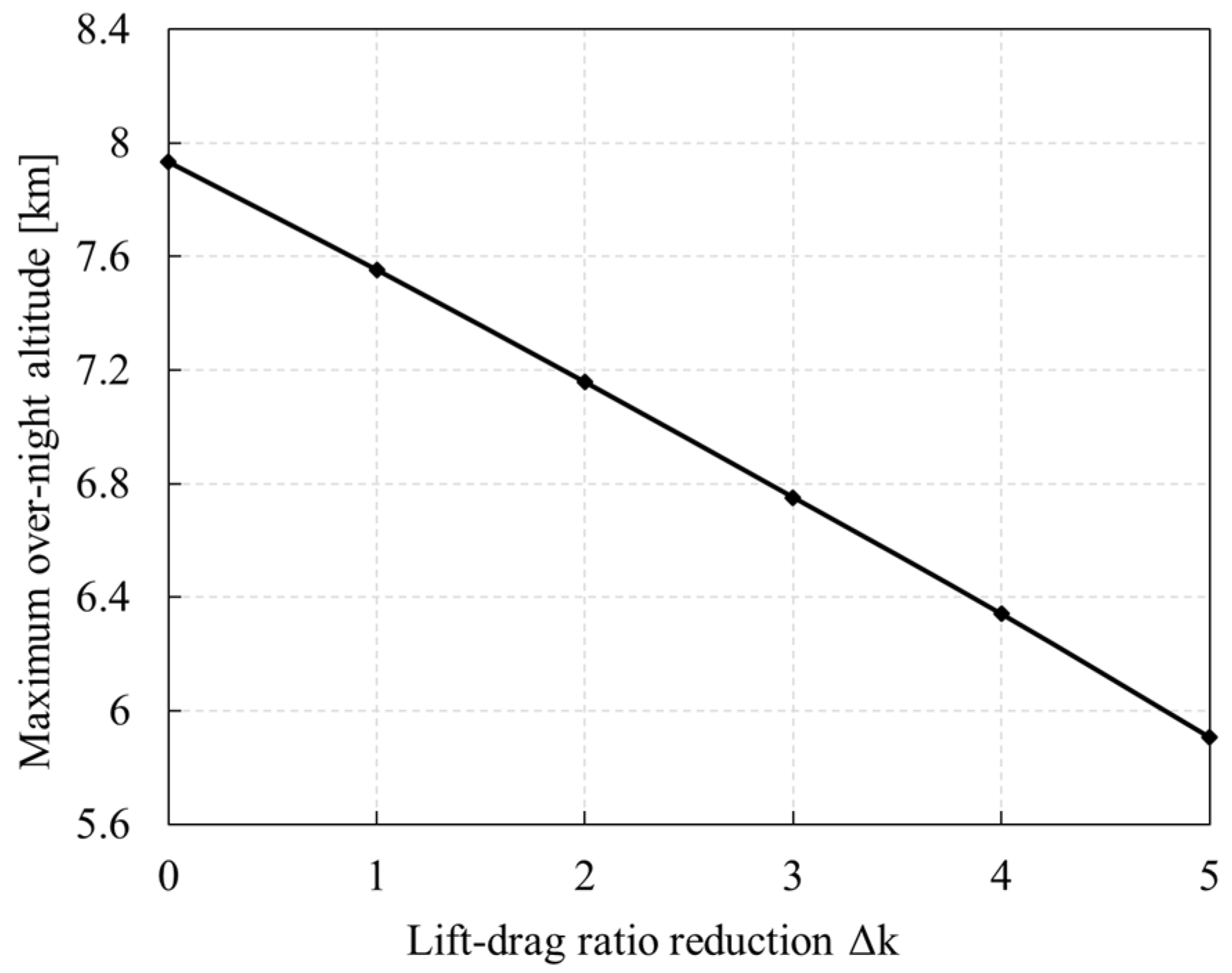
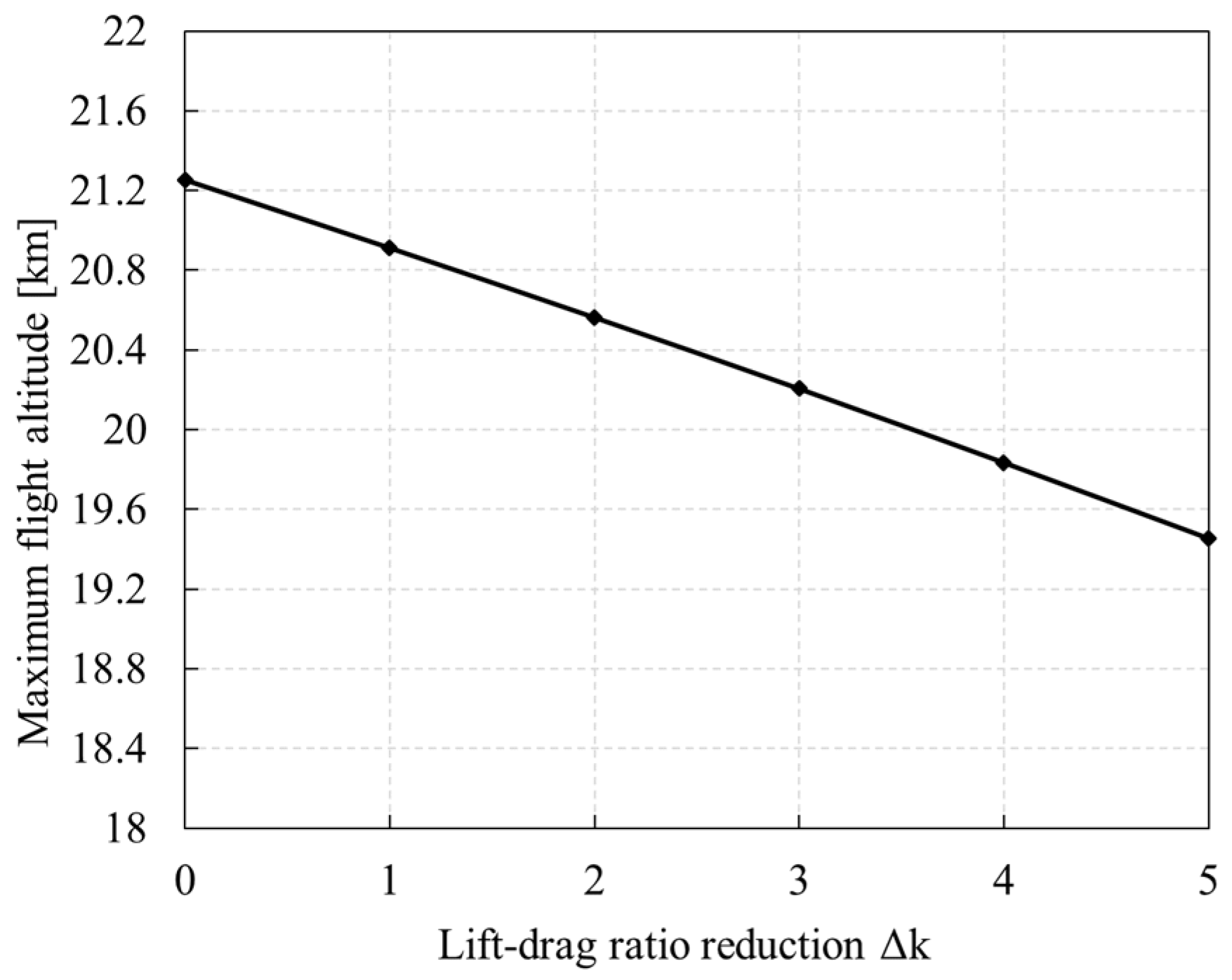
5.2.1. Lift–Drag Ratio
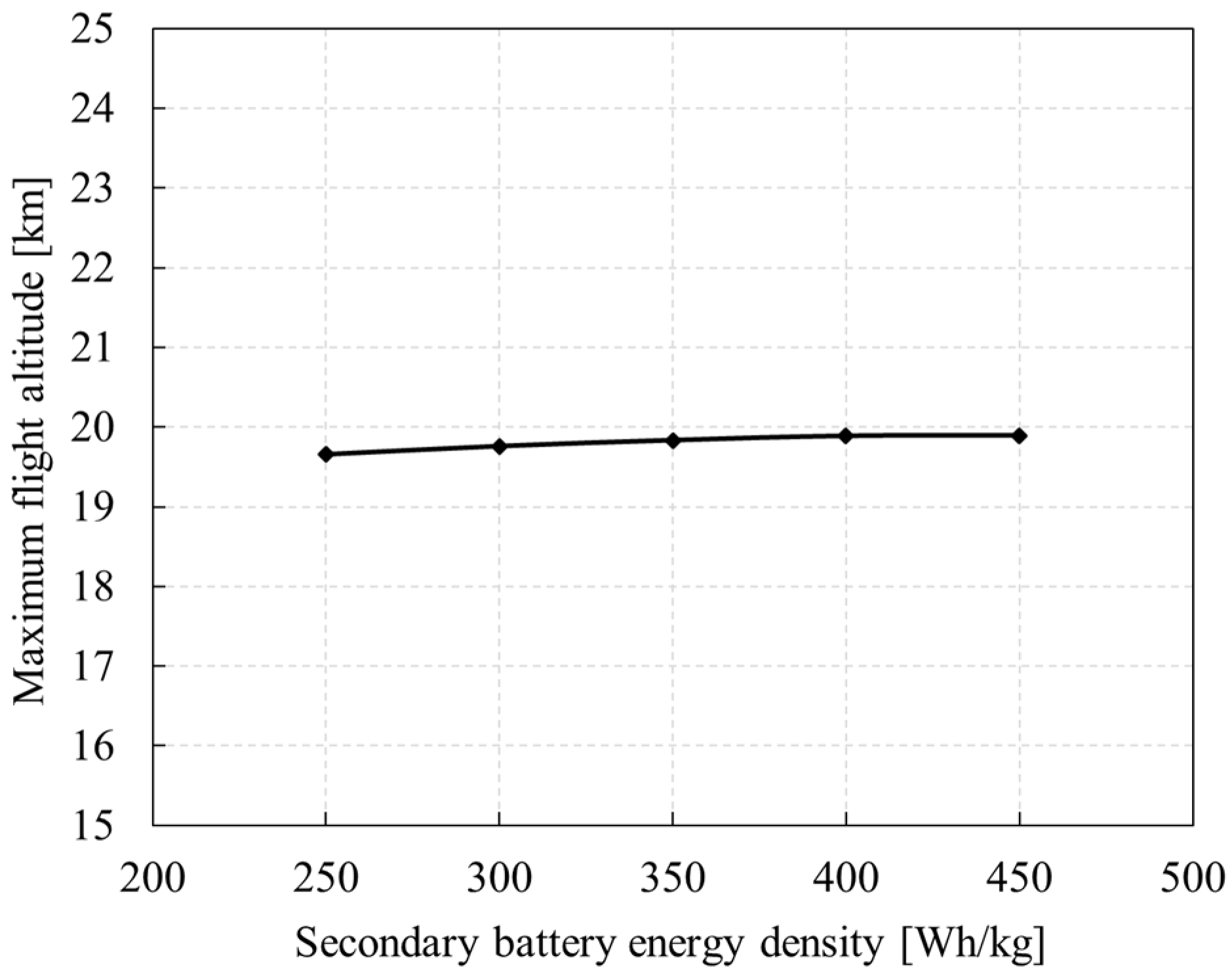
5.2.2. Secondary Battery Energy Density
6. Conclusions
- 1)
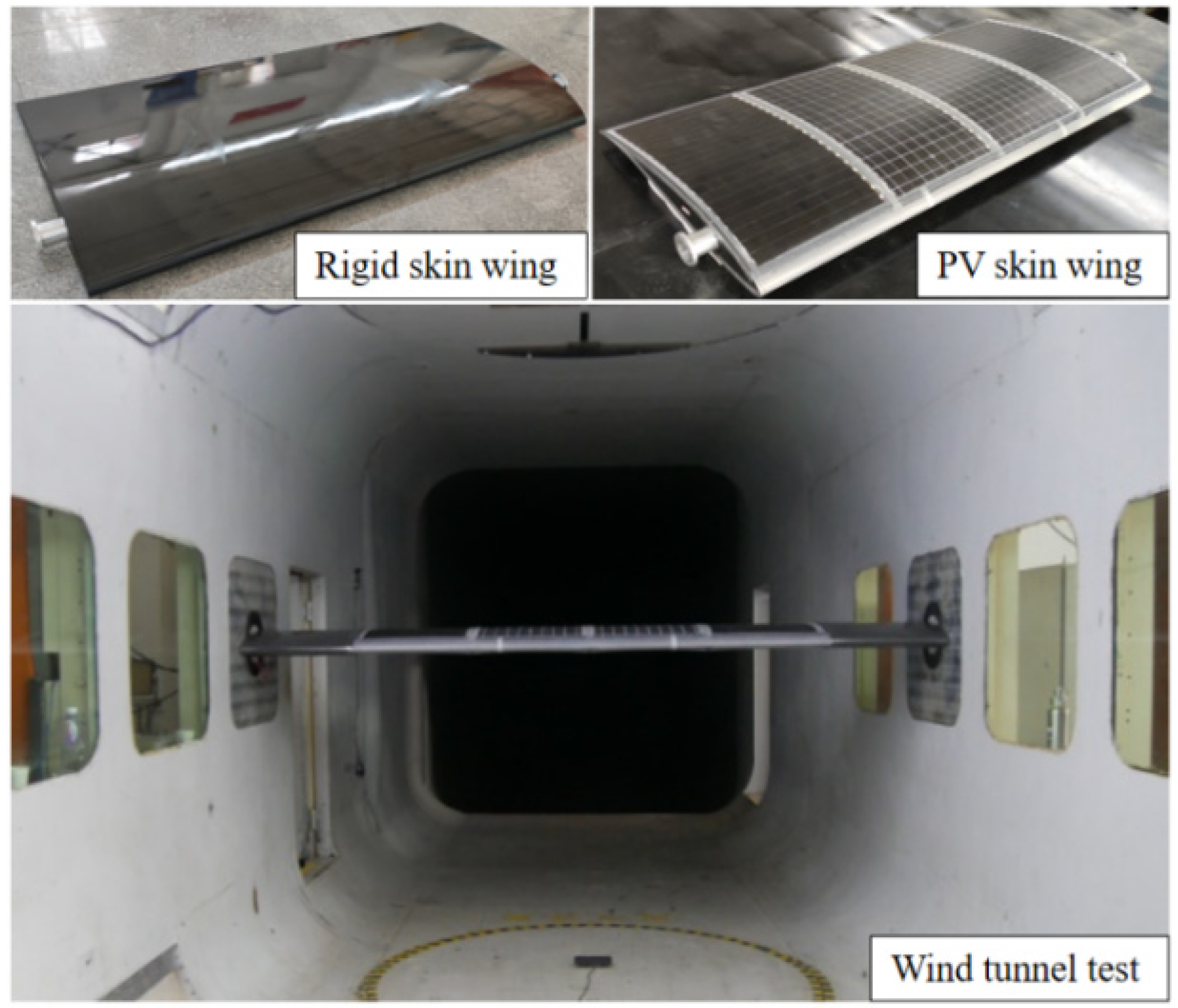
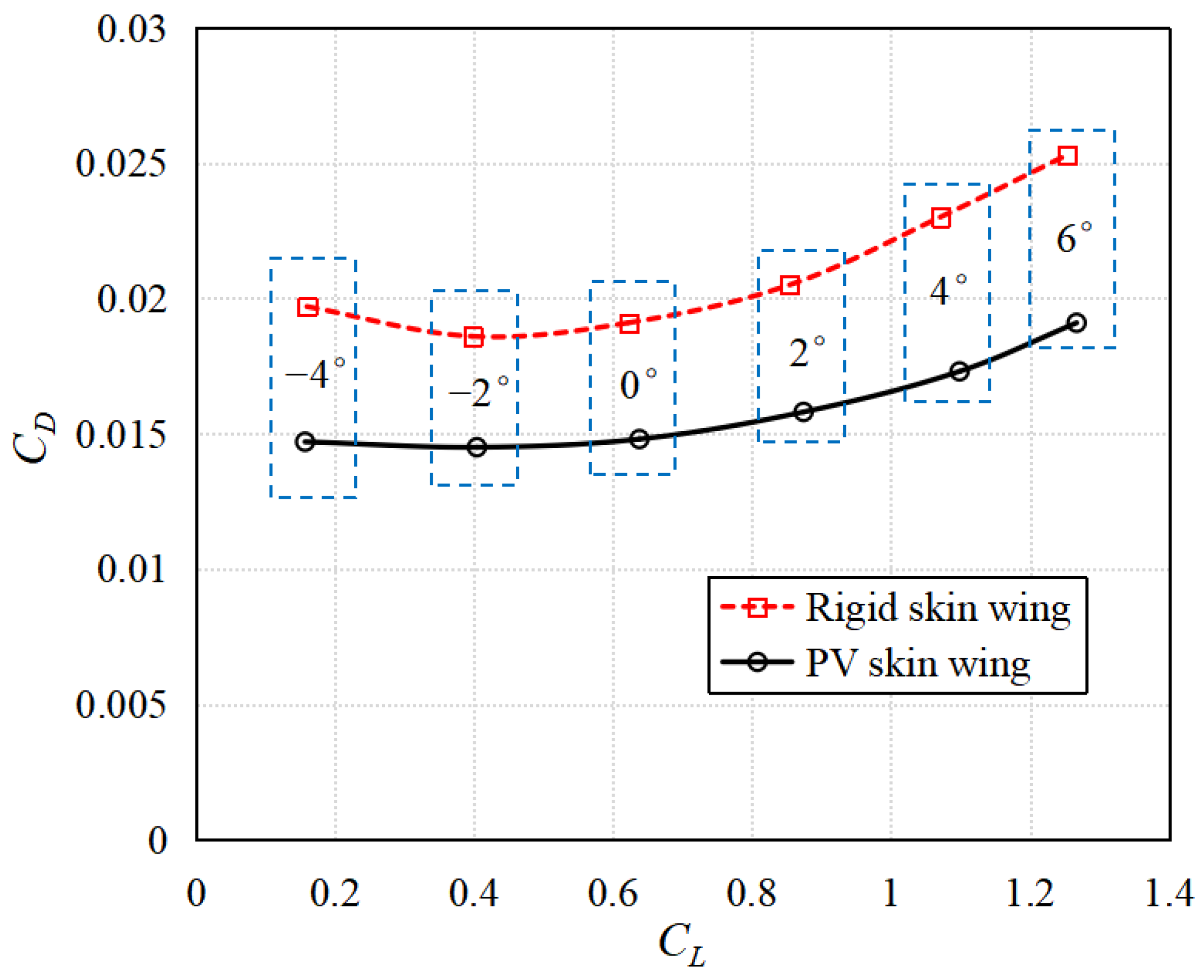
- When building the aerodynamic model, the influence of flexible photovoltaic film on the aerodynamic characteristics should be considered. The deformation of the film has little effect on the lift coefficient but will lead to a significant increase in the drag coefficient.
- 2)
- When establishing the flight strategy, the solar-powered UAV shall use light energy to climb to the highest possible height before sunset, and it shall avoid cruising at high altitude at night. These are the core means to maximize light utilization.
- 3)
- Too-early takeoff time will cause the secondary battery to be exhausted before the sun rises. Too-late takeoff time will lead to failure to climb to the specified altitude on the first day, thus affecting the night flight. The closer to the summer solstice, the wider the takeoff window.
- 4)
- In the Northern Hemisphere, in order to achieve a higher altitude, the solar-powered UAV should fly at a low latitude in winter and fly at an appropriate high latitude (30° N–45° N) in summer.
- 5)
- For every 1 kg increase in the total takeoff weight, the night height and the maximum flight height will decrease by about 0.2 km. When the total takeoff weight is more than 10% overweight, the whole aircraft will deviate from the design point more, and the efficiency of the power system will decrease.
- 6)
- Each time the lift-to-drag ratio decreases by 1, the night flight altitude decreases and the maximum flight altitude decreases by about 0.4 km. When the energy density of the secondary battery increases by 10 Wh/kg, the altitude will increase by 0.33 km.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rajendran, P.; Smith, H. Future trend analysis on the design and performance of solar-powered electric unmanned aerial vehicles. Adv. Mater. Res. 2015, 1125, 635–640. [Google Scholar] [CrossRef]
- Fazelpour, F.; Vafaeipour, M.; Rahbari, O.; Shirmohammadi, R. Considerable parameters of using PV cells for solar-powered aircrafts. Renew. Sustain. Energy Rev. 2013, 22, 81–91. [Google Scholar] [CrossRef]
- Cestino, E. Design of solar high altitude long endurance aircraft for multi payload & operations. Aerosp. Sci. Technol. 2006, 10, 541–550. [Google Scholar]
- Cocconi, A. AC Propulsion SoLong UAV Flies for 48 Hours on Sunlight Two Nights Aloft Opens New Era of Sustainable Flight; AC Propulsion: San Dimas, CA, USA, 2005. [Google Scholar]
- QinetiQ. Solar aircraft achieves longest unmanned flight. Reinf. Plast. 2010, 54, 9. [Google Scholar] [CrossRef]
- Oettershagen, P.; Melzer, A.; Mantel, T.; Rudin, K.; Stastny, T.; Wawrzacz, B.; Hinzmann, T.; Leutenegger, S.; Alexis, K.; Siegwart, R. Design of small hand-launched solar-powered UAVs: From concept study to a multi-day world endurance record flight. J. Field Robot. 2017, 34, 1337–1352. [Google Scholar] [CrossRef]
- Global UAV: Russia pre Equipped Solar UAV to Replace Low Earth Orbit Satellite. 2017. Available online: https://baijiahao.baidu.com/s?id=1563977586208199&wfr=spider&for=pc (accessed on 7 April 2017).
- Catherine Buchaniec: Airbus’ Zephyr Drone Test Unexpectedly Halted after Two Months Aloft. 2022. Available online: https://www.c4isrnet.com/newsletters/2022/08/23/airbus-zephyr-drone-test-unexpectedly-halted-after-two-months-aloft/ (accessed on 24 August 2022).
- Zhang, L. Research on Overall Design of Ultra-Long Endurance Solar Unmanned Aerial Vehicle. Ph.D. Thesis, Beihang University, Beijing, China, 2021. [Google Scholar]
- Noth, A. Design of Solar Powered Airplanes for Continuous Flight. Ph.D. Thesis, ETH Zurich, Zurich, Switzerland, 2008. [Google Scholar]
- Colas, D.; Roberts, N.H.; Suryakumar, V.S. HALE Multidisciplinary Design Optimization Part I: Solar-Powered Single and Multiple-Boom Aircraft. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GE, USA, 25–29 June 2018; p. 3028. [Google Scholar]
- Colas, D.; Roberts, N.H.; Suryakumar, V.S. HALE Multidisciplinary Design Optimization Part II: Solar-Powered Flying-Wing Aircraft. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GE, USA, 25–29 June 2018; p. 3029. [Google Scholar]
- Wang, X.; Yang, Y.; Wang, D.; Zhang, Z. Mission-oriented cooperative 3D path planning for modular solar-powered aircraft with energy optimization. Chin. J. Aeronaut 2021, 35, 98–109. [Google Scholar] [CrossRef]
- Wang, C.Y.; Zhou, Z.; Wang, R. Study on operation strategy of solar-powered UAV based on longest endurance. J. Northwestern Polytech. Univ. 2020, 38, 75–83. [Google Scholar] [CrossRef]
- Dwivedi, V.S.; Kumar, P.; Ghosh, A.K.; Kamath, G.S. Selection of size of battery for solar powered aircraft. IFAC-PapersOnLine 2018, 51, 424–430. [Google Scholar] [CrossRef]
- Wu, M.; Shi, Z.; Xiao, T.; Ang, H. Flight trajectory optimization of sun-tracking solar aircraft under the constraint of mission region. Chin. J. Aeronaut 2021, 31, 140–153. [Google Scholar] [CrossRef]
- Ma, D.Y.; Chen, N.F.; Tao, Q.L.; Zhao, H.Y.; Liu, H.; Bai, Y.M.; Chen, J.K. Radiation resistance and degradation mechanism of space GaInP/GaAs/Ge triple-junction solar cell. Mater. Rep. 2017, 31, 12–16. [Google Scholar]
- Hu, J.M. Radiation Effects of Space Charged Particles and Method of Predicting Degradation of Performance in Orbit for GaAs Solar Cells. Ph.D. Thesis, Harbin Industrial University, Harbin, China, 2009. [Google Scholar]
- Yan, Y.Y. Radiation Damage Analysis of GaInP/GaAs/Ge Solar Cells. M.D. Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2019. [Google Scholar]
- Liu, H.X.; Chen, X.T.; Sun, Q.; Zhao, C. Cycle performance characteristics of soft pack lithium-ion batteries under vacuum environment. Energy Storage Sci. Technol. 2022, 11, 1806–1815. [Google Scholar]
- Mussa, A.S.; Klett, M.; Lindbergh, G.; Lindström, R.W. Effects of external pressure on the performance and ageing of single-layer lithium-ion pouch cells. J. Power Sources 2018, 385, 18–26. [Google Scholar] [CrossRef]
- Wang, S.Q.; Ma, D.L.; Yang, M.Q.; Zhang, L. Three-dimensional optimal path planning for high-altitude solar-powered UAV. J. Beijing Univ. Aeronaut. Astronaut. 2019, 45, 936–943. [Google Scholar]
- Klesh, A.T.; Kabamba, P.T. Solar-powered aircraft: Energy-optimal path planning and perpetual endurance. J. Guid. Control Dynam. 2009, 32, 1320–1329. [Google Scholar] [CrossRef]
- Wang, S.; Ma, D.; Yang, M.; Zhang, L.; Li, G. Flight strategy optimization for high-altitude long-endurance solar-powered aircraft based on Gauss pseudo-spectral method. Chin. J. Aeronaut 2019, 32, 2286–2298. [Google Scholar] [CrossRef]
- Gao, X.Z.; Hou, Z.X.; Guo, Z.; Wang, P.; Zhang, J.T. Research on characteristics of gravitational gliding for high-altitude solar-powered unmanned aerial vehicles. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2012, 227, 1911–1923. [Google Scholar] [CrossRef]
- Gao, X.-Z.; Hou, Z.-X.; Guo, Z.; Fan, R.-F.; Chen, X.-Q. The equivalence of gravitational potential and rechargeable battery for high-altitude long-endurance solar-powered aircraft on energy storage. Energy Convers. Manag. 2013, 76 (Suppl. C), 986–995. [Google Scholar] [CrossRef]
- Sachs, G.; Lenz, J.; Holzapfel, F. Unlimited endurance performance of solar UAVs with minimal or zero electric energy storage. In Proceedings of the AIAA Guidence, Navigation and Control Conference, Chicago, IL, USA, 10–13 August 2009; p. 6013. [Google Scholar]
- Zhang, D.H.; Zhang, J.; Li, J.F. Energy balance modeling for solar powered aircrafts. Acta Aeronaut. Astronaut. Sin. 2014, 37, 16–23. [Google Scholar]
- Ma, J.C.; Zhao, X.Y.; Zhou, R. Control strategy research for long-flight UAV and establishment of simulation platform. Aircr. Des. 2016, 37 (Suppl. S1), S16–S23. [Google Scholar]
- Ma, D.L.; Bao, W.Z.; Qiao, Y.H. Study of right path for solar-powered aircraft based on gravity energy reservation. Acta Aeronaut. Astronaut. Sin. 2014, 35, 408–416. [Google Scholar]
- Huang, H.L.; Savkin, A.V. Path planning for a solar-powered UAV inspecting mountain sites for safety and rescue. Energies 2021, 14, 1968. [Google Scholar] [CrossRef]
- Zhang, L.; Ma, D.; Yang, M.; Xia, X.; Yao, Y. Optimization and analysis of composite sandwich box beam for solar drones. Chin. J. Aeronaut 2021, 34, 148–165. [Google Scholar] [CrossRef]
- Zhang, L.; Ma, D.; Yang, M.; Yao, Y.; Yu, Y.; Yang, X. Experimental and numerical study on the performance of double membrane wing for long-Endurance low-speed aircraft. Appl. Sci. 2022, 12, 6765. [Google Scholar] [CrossRef]
- Stojaković, P.; Rašuo, B. Single propeller airplane minimal flight speed based upon the lateral maneuver condition. Aerosp. Sci. Technol. 2016, 49, 239–249. [Google Scholar] [CrossRef]
- Stojaković, P.; Velimirović, K.; Rašuo, B. Power optimization of a single propeller airplane take-off run on the basis of lateral maneuver limitations. Aerosp. Sci. Technol. 2018, 72, 553–563. [Google Scholar] [CrossRef]







































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aij | (Re/105)0 | (Re/105)1 | (Re/105)2 |
|---|---|---|---|
| α0 | 7.983 × 10−1 | 9.208 × 10−3 | −9.792 × 10−5 |
| α1 | 5.898 × 100 | 1.392 × 10−2 | 2.255 × 10−3 |
| α2 | −7.246 × 100 | 4.610 × 10−2 | −1.894 × 10−2 |
| Bij | (Re/105)0 | (Re/105)1 | (Re/105)2 |
|---|---|---|---|
| α0 | 2.284 × 10−2 | −6.603 × 10−4 | 1.493 × 10−5 |
| α1 | 1.403 × 10−1 | 2.108 × 10−4 | −8.493 × 10−5 |
| α2 | 1.362 × 100 | −6.438 × 10−2 | 2.983 × 10−3 |
| Subsystems | Parameters | Value |
|---|---|---|
| PV cells | Initial conversion efficiency | 28% |
| Power generation area | 12 m2 | |
| Secondary batteries | Energy density | 350 Wh/kg |
| Discharge depth | 90% | |
| Maximum discharge rate | 0.2 C | |
| Energy management modules | MPPT efficiency | 95% |
| DC/DC module efficiency | 80% | |
| Cable efficiency | 80% |
| Electrical Parameters | Annual Equivalent Fluence of Solar Proton, cm−2 a−1 | Annual Equivalent Fluence of Electrons, cm−2 a−1 | Sum of Annual Equivalent Fluence of Proton and Electron, cm−2 a−1 |
|---|---|---|---|
| Voc | 1.33 × 1010 | 1.02 × 1013 | 3.54 × 1013 |
| Isc | 1.44 × 1010 | 1.02 × 1013 | 1.52 × 1013 |
| Pmax | 1.33 × 1010 | 1.02 × 1013 | 2.35 × 1013 |
| Parameters | Values |
|---|---|
| Number of motors | 2 |
| Maximum output power of the motor | 560 W |
| Propeller diameter | 1.4 m |
| Cij | (Re/105)0 | (Re/105)1 | (Re/105)2 |
|---|---|---|---|
| λ0 | −2.481 × 100 | 2.783 × 100 | −1.818 × 10−1 |
| λ1 | 6.882 × 100 | −4.081 × 100 | −1.432 × 100 |
| λ2 | −3.640 × 100 | 8.042 × 10−1 | 2.200 × 100 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Ma, D.; Yang, M.; Yang, X.; Yu, Y. Modeling and Simulation of Flight Profile and Power Spectrum for Near-Space Solar-Powered UAV. Aerospace 2022, 9, 672. https://doi.org/10.3390/aerospace9110672
Zhang L, Ma D, Yang M, Yang X, Yu Y. Modeling and Simulation of Flight Profile and Power Spectrum for Near-Space Solar-Powered UAV. Aerospace. 2022; 9(11):672. https://doi.org/10.3390/aerospace9110672
Chicago/Turabian StyleZhang, Liang, Dongli Ma, Muqing Yang, Xiaopeng Yang, and Yayun Yu. 2022. "Modeling and Simulation of Flight Profile and Power Spectrum for Near-Space Solar-Powered UAV" Aerospace 9, no. 11: 672. https://doi.org/10.3390/aerospace9110672
APA StyleZhang, L., Ma, D., Yang, M., Yang, X., & Yu, Y. (2022). Modeling and Simulation of Flight Profile and Power Spectrum for Near-Space Solar-Powered UAV. Aerospace, 9(11), 672. https://doi.org/10.3390/aerospace9110672