
A Continuous Multivariable Finite-Time Super-Twisting Attitude and Rate Controller for Improved Rotorcraft Handling


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- 1.
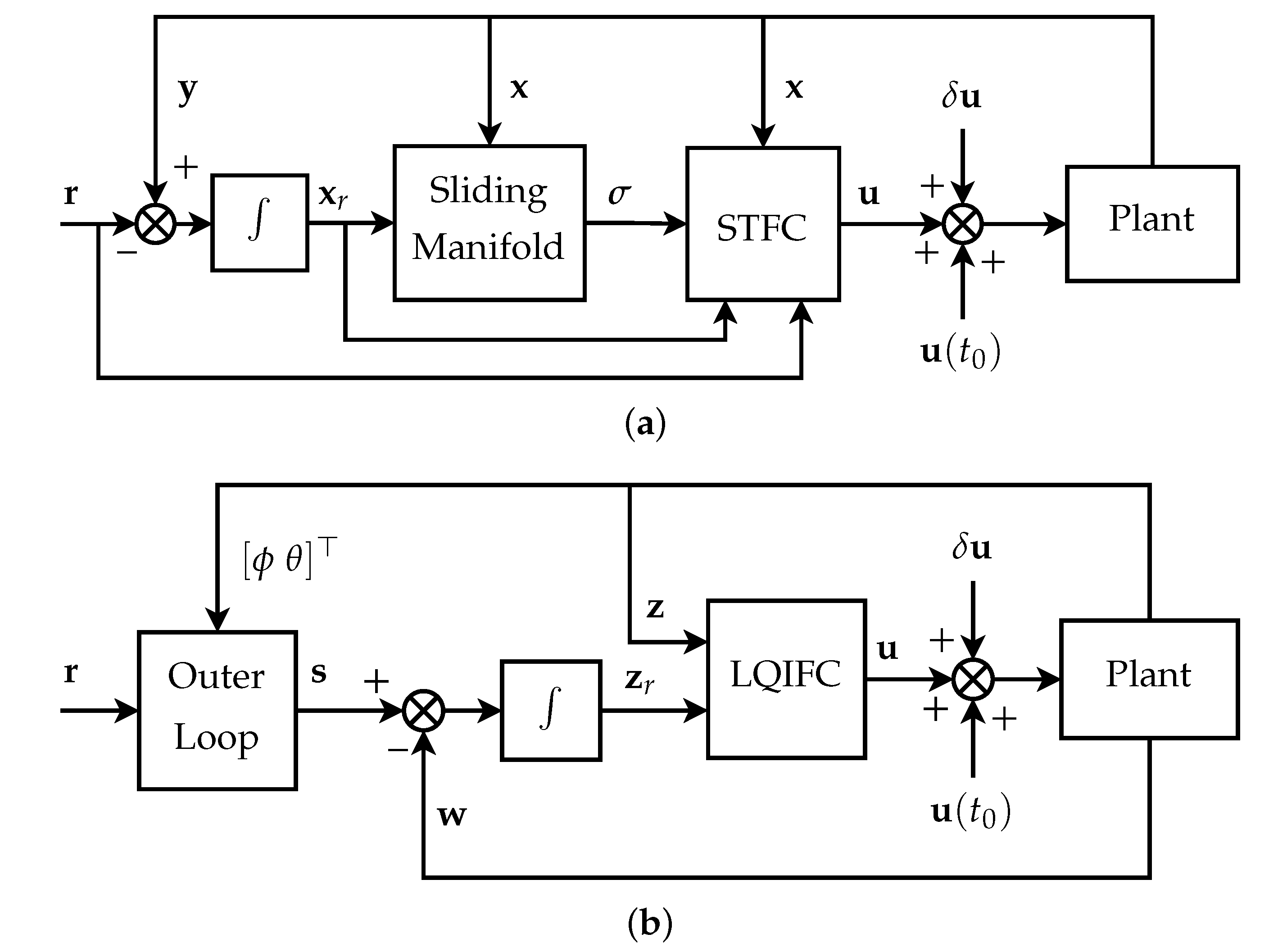
- A multivariable, finite-time-convergent, super-twisting flight controller (STFC) based on [23] is synthesized for a helicopter attitude and rate command system. Its multivariable structure respects plant cross-coupling and ensures an identical convergence time for all sliding variables. Unlike References [9,20], estimation of neither the sliding variable derivative nor the exogenous disturbance input is needed, thus offering a simpler yet equally robust controller.
- 2.
- The STFC’s efficacy, chattering alleviation, and finite-time convergence are demonstrated on a nonlinear, higher-order helicopter plant model in atmospheric turbulence. To our best knowledge, this constitutes the first SOSM controller validation on a nonlinear helicopter plant, since Reference [20] used a lower-order, linear plant. Performance comparisons are also presented between the STFC and a linear quadratic flight controller, the latter synthesized along the lines of Reference [24].
2. Model Description
3. Response Characteristics and Sliding Manifold Design
3.1. Response Requirements for Good Handling Qualities
3.2. Sliding Manifold

3.3. Expected Closed-Loop Behavior
4. Multivariable Finite-Time Super-Twisting Flight Controller
5. Numerical Simulations
5.1. Simulation Environment and STFC Gain Setting
5.2. Linear Quadratic Integral Flight Controller
5.3. Results
5.4. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Perfect, P.; Jump, M.; White, M.D. Handling Qualities Requirements for Future Personal Aerial Vehicles. J. Guid. Control Dyn. 2015, 38, 2386–2398. [Google Scholar] [CrossRef] [Green Version]
- Perfect, P.; Jump, M.; White, M.D. Methods to Assess the Handling Qualities Requirements for Personal Aerial Vehicles. J. Guid. Control Dyn. 2015, 38, 2161–2172. [Google Scholar] [CrossRef] [Green Version]
- Berger, T.; Tischler, M.B.; Horn, J.F. High-Speed Rotorcraft Pitch Axis Response Type Investigation. In Proceedings of the Vertical Flight Society 77th Annual Forum, Online, 11–13 May 2021. [Google Scholar]
- Baskett, B.J. Aeronautical Design Standard-Performance Specification-Handling Qualities Requirements for Military Rotorcraft; Technical Report ADS-33E-PRF; US Army Aviation and Missile Command: Redstone Arsenal, AL, USA, 2000. [Google Scholar]
- Padfield, G.D. Helicopter Flight Dynamics, 1st ed.; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2007; pp. 269–292. [Google Scholar]
- Mettler, B. Identification Modeling and Characteristics of Miniature Rotorcraft, 1st ed.; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2003; pp. 13–25. [Google Scholar]
- Geluardi, S.; Venrooij, J.; Olivari, M.; Bülthoff, H.H.; Pollini, L. Transforming Civil Helicopters into Personal Aerial Vehicles: Modeling, Control, and Validation. J. Guid. Control Dyn. 2017, 40, 2481–2495. [Google Scholar] [CrossRef]
- Mehling, T.; Halbe, O.; Gasparac, T.; Vrdoljak, M.; Hajek, M. Piloted Simulation of Helicopter Shipboard Recovery with Visual and Control Augmentation. In Proceedings of the AIAA Scitech 2021 Forum, Online, 11–15 & 19–21 January 2021. [Google Scholar]
- Huang, Y.; Zhu, M.; Zheng, Z.; Feroskhan, M. Fixed-time Autonomous Shipboard Landing Control of a Helicopter with External Disturbances. Aerosp. Sci. Technol. 2019, 84, 18–30. [Google Scholar] [CrossRef]
- Alexis, K.; Papachristos, C.; Siegwart, R.; Tzes, A. Robust Model Predictive Flight Control of Unmanned Rotorcrafts. J. Intell. Robot. Syst. 2016, 81, 443–469. [Google Scholar] [CrossRef]
- Alvarenga, J.; Vitzilaios, N.I.; Valavanis, K.P.; Rutherford, M.J. Survey of Unmanned Helicopter Model-Based Navigation and Control Techniques. J. Intell. Robot. Syst. 2015, 80, 87–138. [Google Scholar] [CrossRef]
- Utkin, V. Sliding Modes in Control and Optimization; Springer: Berlin/Heidelberg, Germany, 1992. [Google Scholar]
- Edwards, C.; Spurgeon, S. Sliding Mode Control: Theory and Applications; CRC Press: Boca Raton, FL, USA, 1998. [Google Scholar]
- Spurgeon, S.; Edwards, C.; Foster, N.P. Robust Model Reference Control Using a Sliding Mode Controller/Observer Scheme with Application to a Helicopter Problem. In Proceedings of the IEEE International Workshop on Variable Structure Systems, Tokyo, Japan, 5–6 December 1996. [Google Scholar]
- McGeoch, D.; McGookin, E.; Houston, S. MIMO Sliding Mode Attitude Command Flight Control System for a Helicopter. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, San Francisco, CA, USA, 15–18 August 2005. [Google Scholar]
- Hess, R.A.; Mallory, N.J. Pseudosliding-Mode Flight Control for Autonomous Rotorcraft Operation. J. Aircr. 2014, 51, 676–681. [Google Scholar] [CrossRef]
- Halbe, O.; Hajek, M. Robust Helicopter Sliding Mode Control for Enhanced Handling and Trajectory Following. J. Guid. Control Dyn. 2020, 43, 1805–1821. [Google Scholar] [CrossRef]
- Halbe, O.; Mehling, T.; Hajek, M.; Vrdoljak, M. Synthesis and Piloted Evaluation of Advanced Rotorcraft Response Types Using Robust Sliding Mode Control. J. Am. Helicopter Soc. 2021, 66, 1–20. [Google Scholar] [CrossRef]
- Levant, A. Sliding Order and Sliding Accuracy in Sliding Mode Control. Int. J. Control. 1993, 58, 1247–1263. [Google Scholar] [CrossRef]
- Halbe, O.; Oza, H. Robust Continuous Finite-Time Control of a Helicopter in Turbulence. IEEE Control. Syst. Lett. 2021, 5, 37–42. [Google Scholar] [CrossRef]
- Levant, A. Robust Exact Differentiation via Sliding Mode Technique. Automatica 1998, 34, 379–384. [Google Scholar] [CrossRef]
- Nagesh, I.; Edwards, C. A Multivariable Super-Twisting Sliding Mode Approach. Automatica 2014, 50, 984–988. [Google Scholar] [CrossRef] [Green Version]
- Basin, M.; Panathula, C.B.; Shtessel, Y. Multivariable Continuous Fixed-Time Second-Order Sliding Mode Control: Design and Convergence Time Estimation. IET Control Theory Appl. 2016, 11, 1104–1111. [Google Scholar] [CrossRef]
- Shin, J.; Nonami, K.; Fujiwara, D.; Hazawa, K. Model-based optimal attitude and positioning control of small-scale unmanned helicopter. Robotica 2005, 23, 51–63. [Google Scholar] [CrossRef]
- Braun, D.; Kampa, K.; Schimke, D. Mission Oriented Investigation of Handling Qualities Through Simulation. In Proceedings of the 17th European Rotorcraft Forum, Berlin, Germany, 24–27 September 1991. [Google Scholar]
- Dietz, M.; Maucher, C.; Schimke, D. Addressing Today’s Aeromechanic Questions by Industrial Answers. In Proceedings of the American Helicopter Society Specialists’ Conference on Aeromechanics, San Francisco, California, USA 20–22 January 2010. [Google Scholar]
- Seher-Weiss, S.; Von Gruenhagen, W. Development of EC 135 Turbulence Models via System Identification. Aerosp. Sci. Technol. 2012, 23, 43–52. [Google Scholar] [CrossRef]
- Srinathkumar, S. Rotorcraft Precision Hover Control in Atmospheric Turbulence via Eigenstructure Assignment. J. Am. Helicopter Soc. 2019, 64, 1–12. [Google Scholar] [CrossRef]
- Panathula, C.B.; Rosales, A.; Shtessel, Y.; Basin, M. Chattering analysis of uniform fixed-time convergent Sliding Mode Control. J. Frankl. Inst. 2017, 354, 1907–1921. [Google Scholar] [CrossRef]

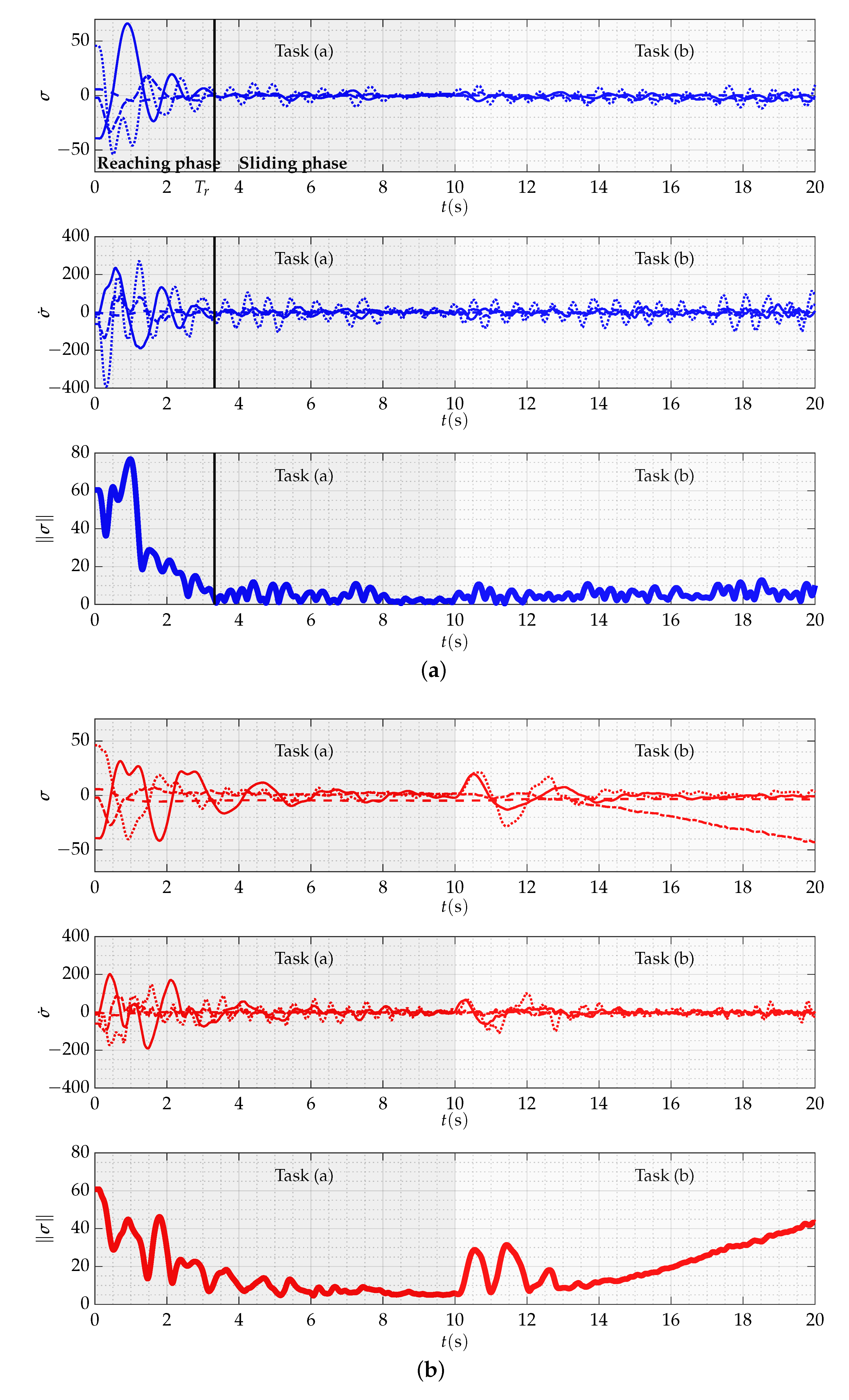
 w channel,
w channel,  r channel,
r channel,  p channel,
p channel,  q channel.
w channel, r channel, p channel, q channel.
q channel.
w channel, r channel, p channel, q channel.
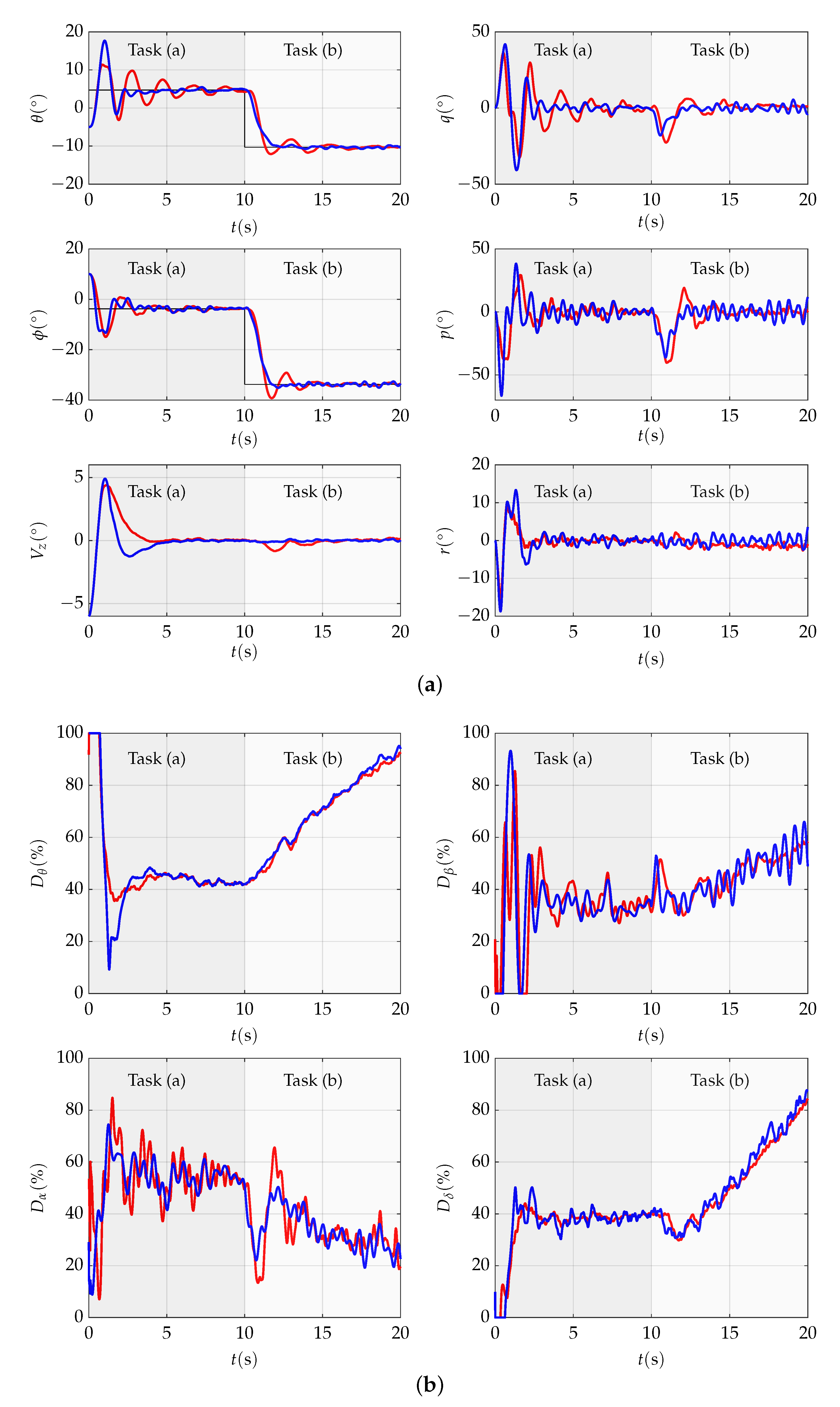
 command,
command,  LQIFC,
LQIFC,  STFC, and Task (b) command tracking, Controller output applied to plant;
STFC, and Task (b) command tracking, Controller output applied to plant;  LQIFC,
LQIFC,  STFC.
command, LQIFC, STFC, and Task (b) command tracking, Controller output applied to plant; LQIFC, STFC.
STFC.
command, LQIFC, STFC, and Task (b) command tracking, Controller output applied to plant; LQIFC, STFC.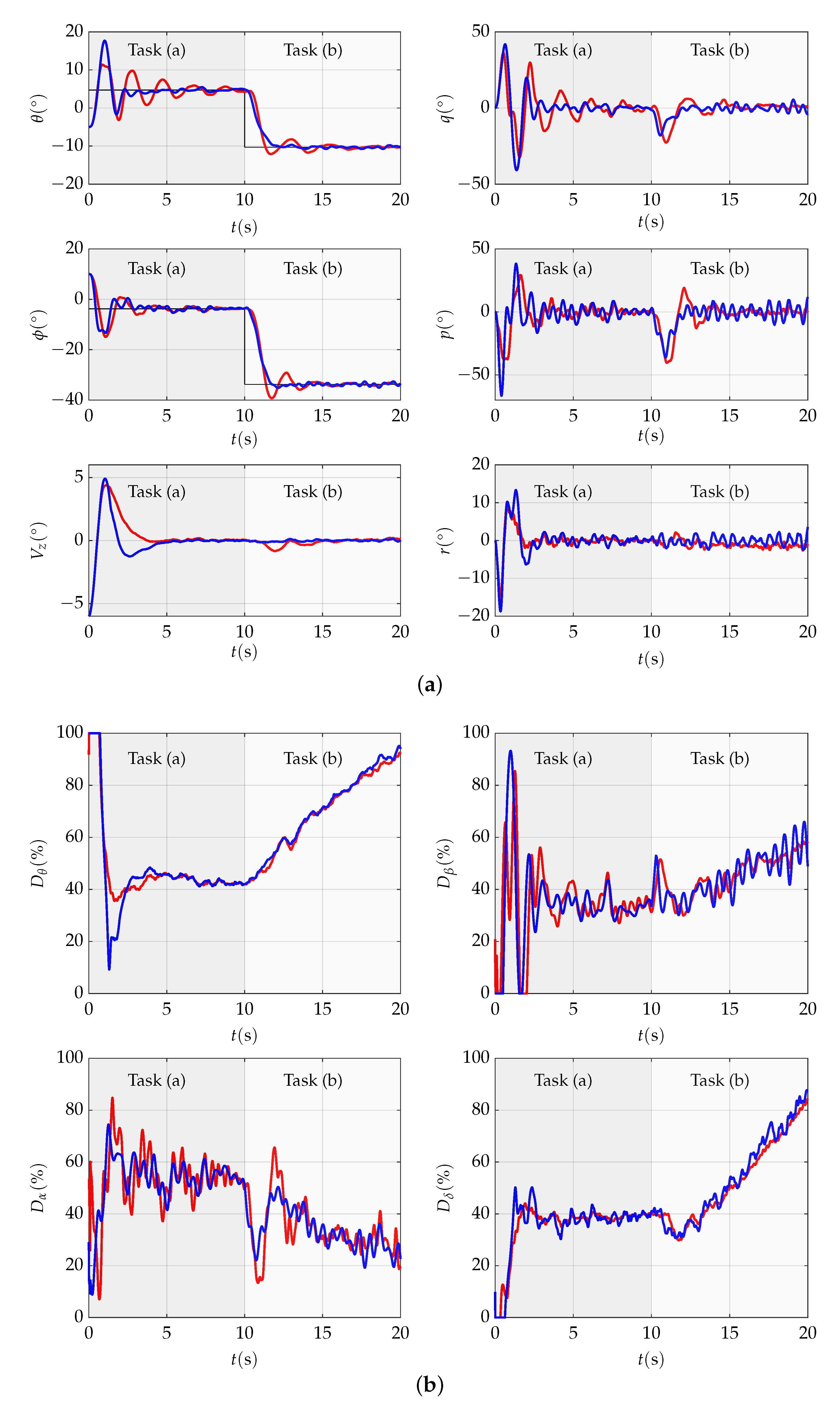
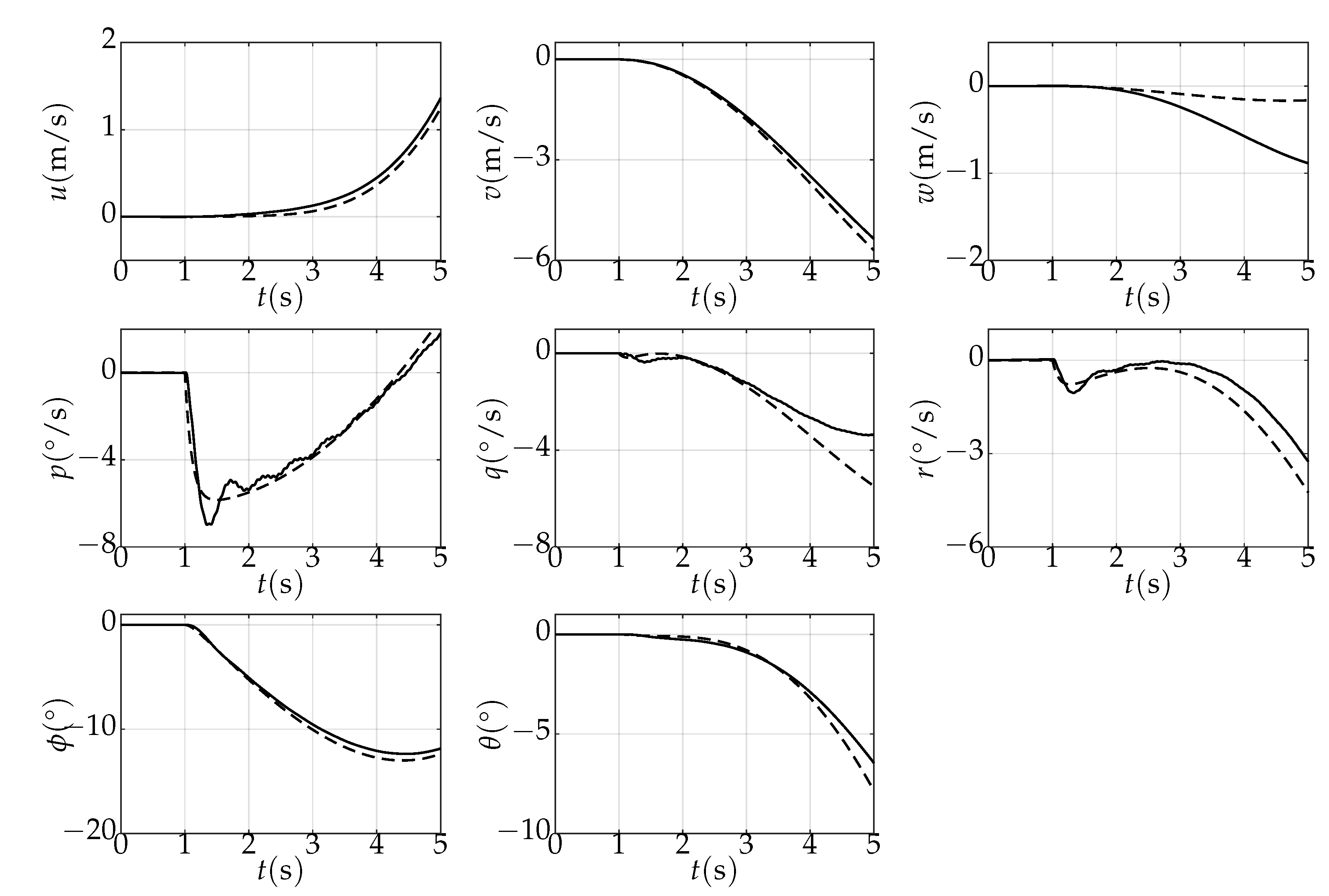
 w channel,
w channel,  r channel,
r channel,  channel,
channel,  channel,
channel,  and Task (b) command tracking, LQIFC;
and Task (b) command tracking, LQIFC;  w channel,
w channel,  r channel,
r channel,  channel,
channel,  channel,
channel,  .
w channel, r channel, channel, channel, and Task (b) command tracking, LQIFC; w channel, r channel, channel, channel, .
.
w channel, r channel, channel, channel, and Task (b) command tracking, LQIFC; w channel, r channel, channel, channel, .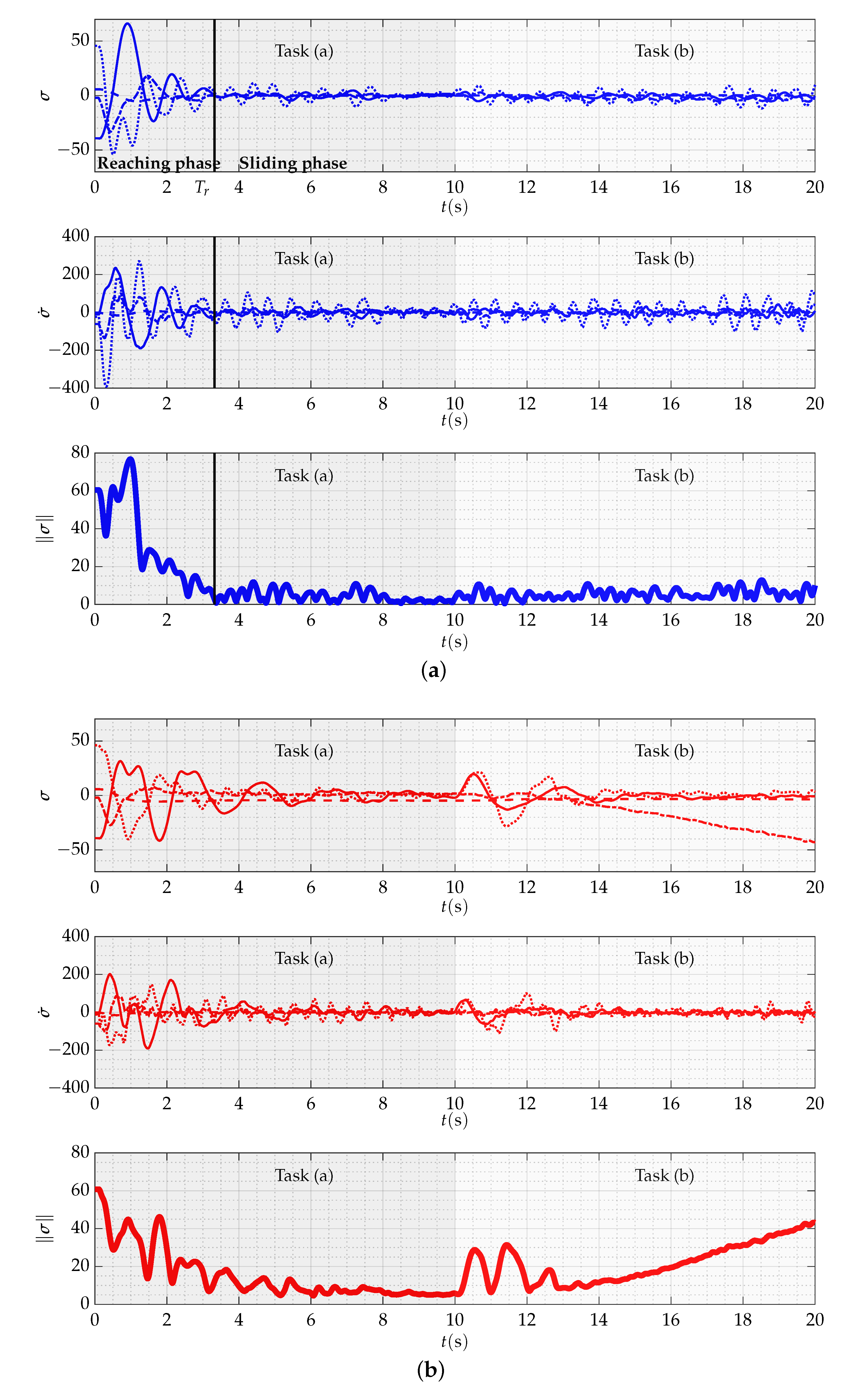
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Halbe, O.; Hajek, M. A Continuous Multivariable Finite-Time Super-Twisting Attitude and Rate Controller for Improved Rotorcraft Handling. Aerospace 2022, 9, 6. https://doi.org/10.3390/aerospace9010006
Halbe O, Hajek M. A Continuous Multivariable Finite-Time Super-Twisting Attitude and Rate Controller for Improved Rotorcraft Handling. Aerospace. 2022; 9(1):6. https://doi.org/10.3390/aerospace9010006
Chicago/Turabian StyleHalbe, Omkar, and Manfred Hajek. 2022. "A Continuous Multivariable Finite-Time Super-Twisting Attitude and Rate Controller for Improved Rotorcraft Handling" Aerospace 9, no. 1: 6. https://doi.org/10.3390/aerospace9010006
APA StyleHalbe, O., & Hajek, M. (2022). A Continuous Multivariable Finite-Time Super-Twisting Attitude and Rate Controller for Improved Rotorcraft Handling. Aerospace, 9(1), 6. https://doi.org/10.3390/aerospace9010006