
Eeloscope—Towards a Novel Endoscopic System Enabling Digital Aircraft Fuel Tank Maintenance



Abstract
1. Introduction
2. Aircraft Fuel Tank Maintenance
2.1. Fuel Tank Functionalities
- Leakage protection is clearly necessary to not run out of fuel during the flight, but also to not have kerosene dripping on flammable components such as the jet engine, which could easily lead to fire.
- Explosion protection is needed, since kerosene vapors and oxygen can bond to a highly flammable gas. This gas mixture can amplify risks from other defects in the tank, e.g., cable defects. It is, therefore, highly necessary to intercept these causal fault chains to prevent explosions, as in flight TWA800 [1].
- Structural strength is needed, since the wing can bend up multiple meters during flight maneuvers and carries most of the uplifting forces of an aircraft.
- Cleanliness is required since contaminations e.g., with water can lead to fuel clogging (icing in pipes) which eventually can lead to engine failure or wrong fuel level indication. Furthermore, microbe contamination can lead to corrosion [4].
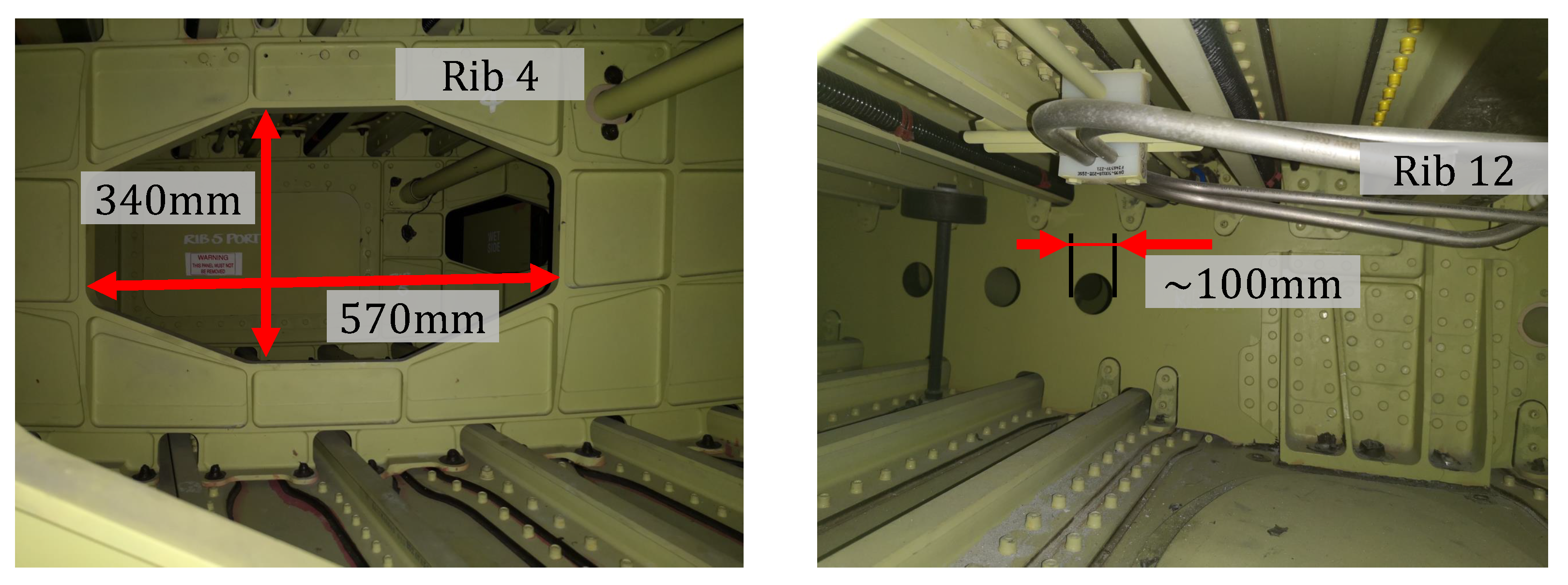
2.2. Maintenance Process
2.2.1. Basic Information
- GVI for Electrical Wiring Interconnection System (EWIS)
- GVI for minor external leaks
- GVI of internal tank wiring and probe attachments
- GVI for EWIS of vent surge tank
- VCK of vent surge burst disc (external)
- GVI of wiring harnesses above center tank.
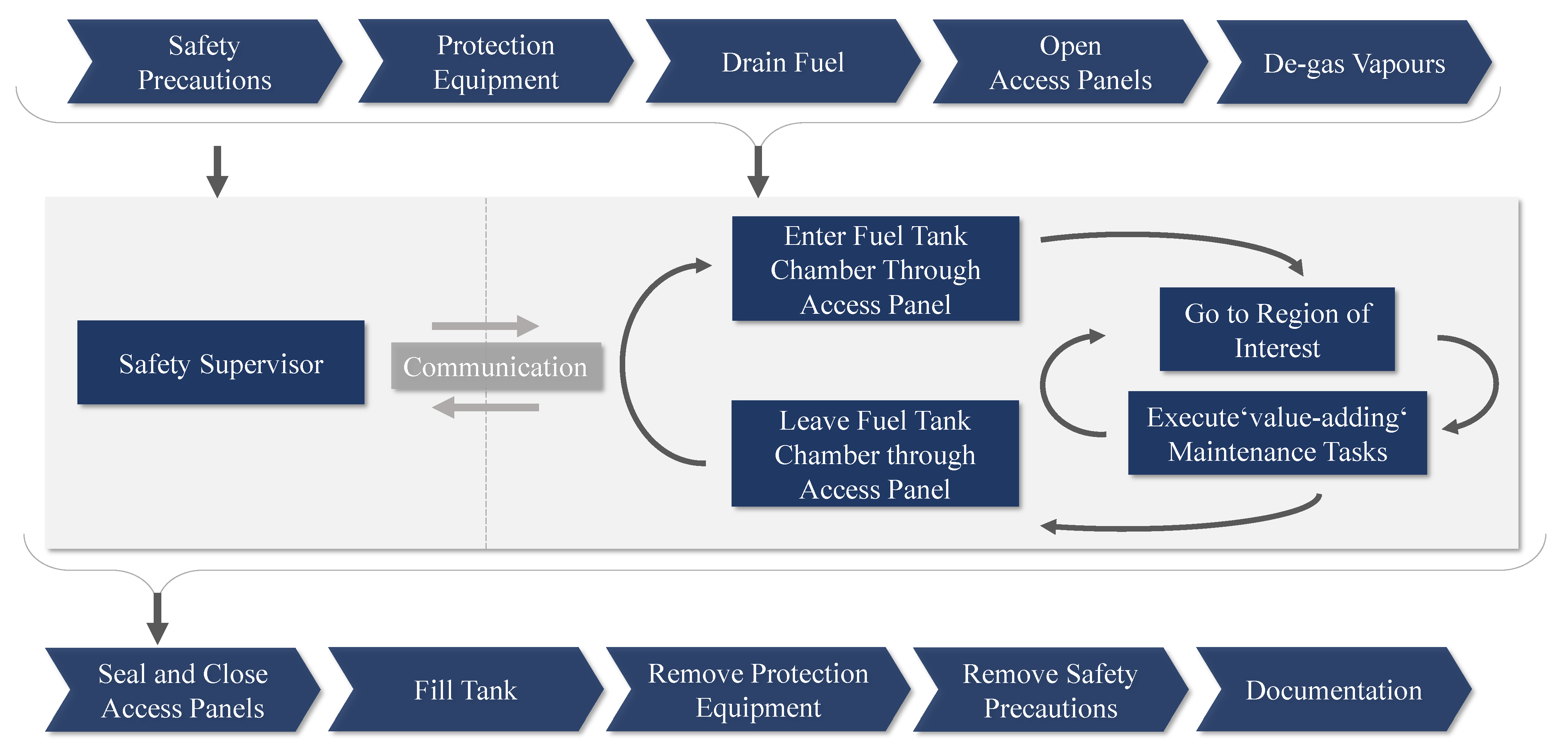
2.2.2. Maintenance Process Description
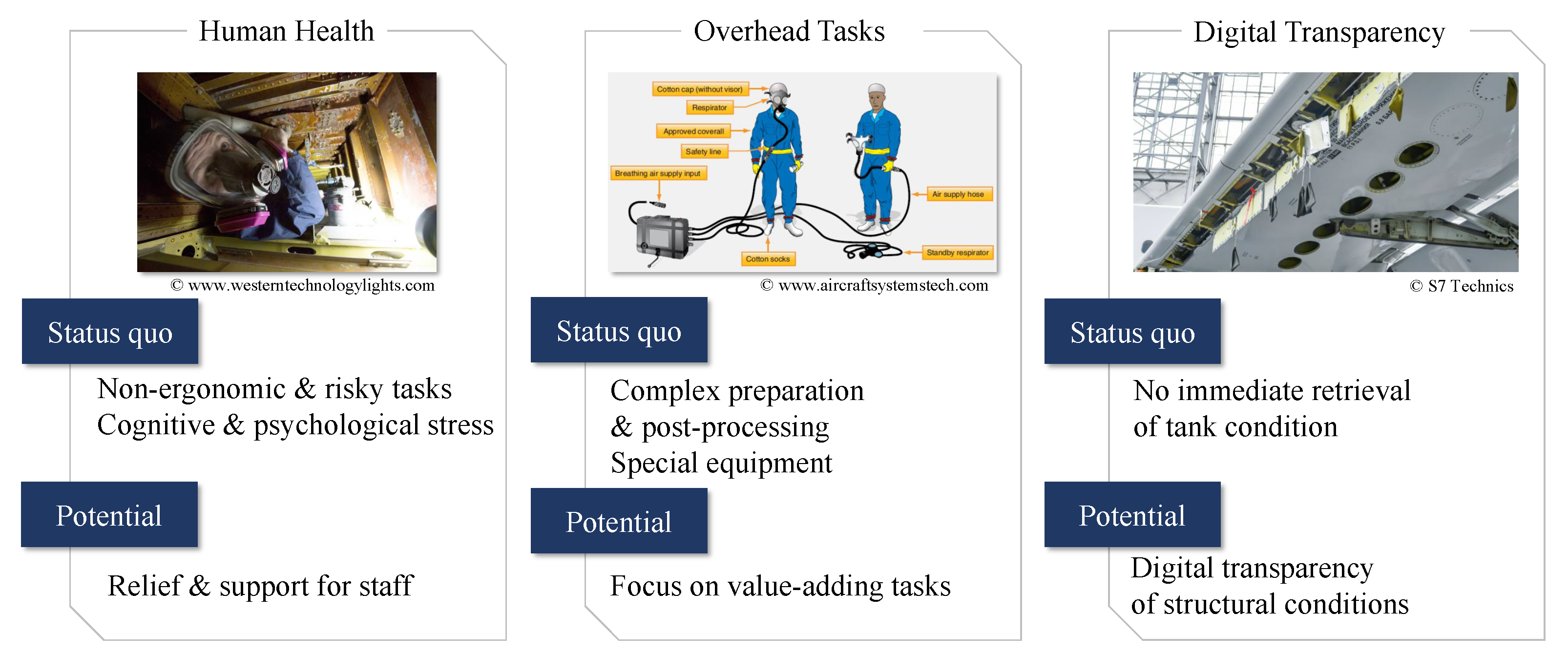
2.3. Major Problem Dimensions
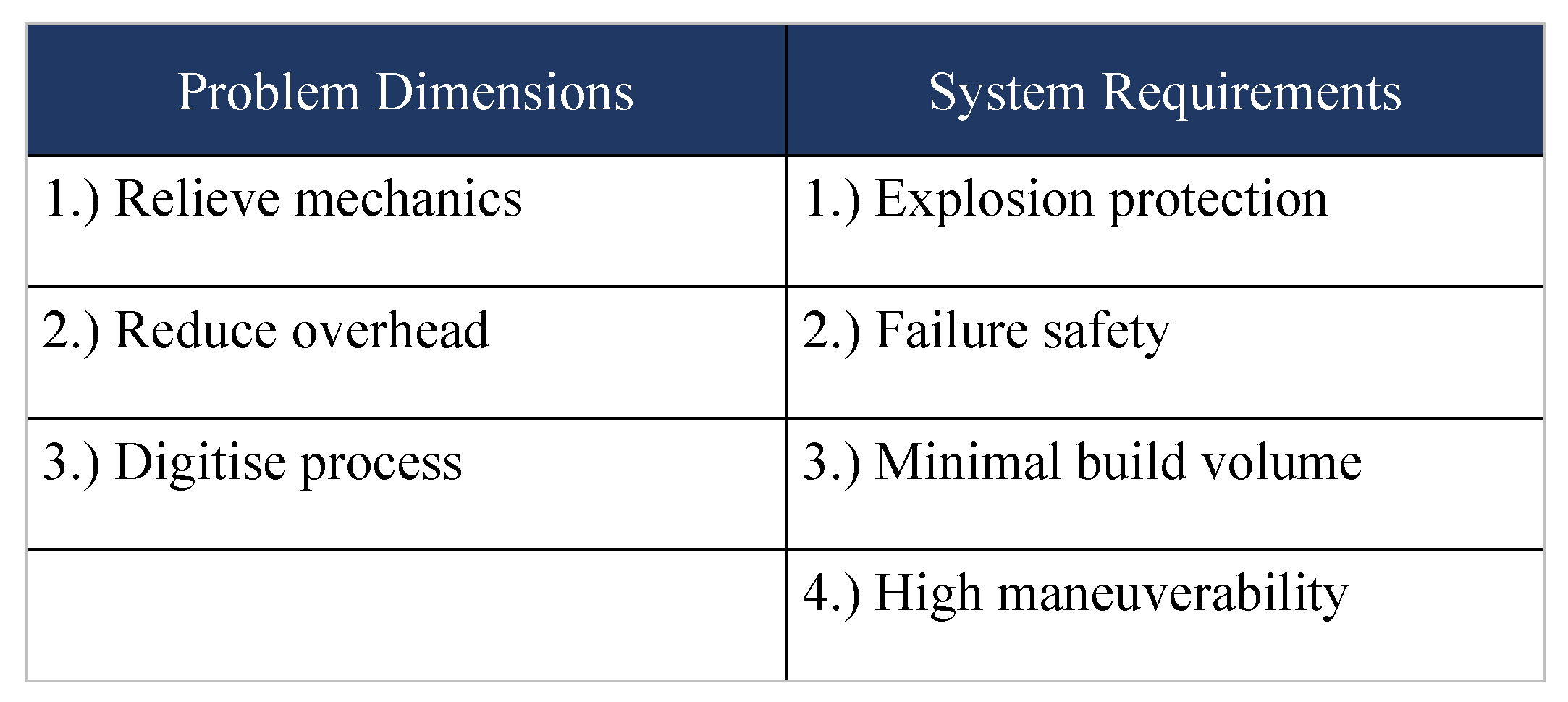
2.4. Specification Sheet Definition and Requirements
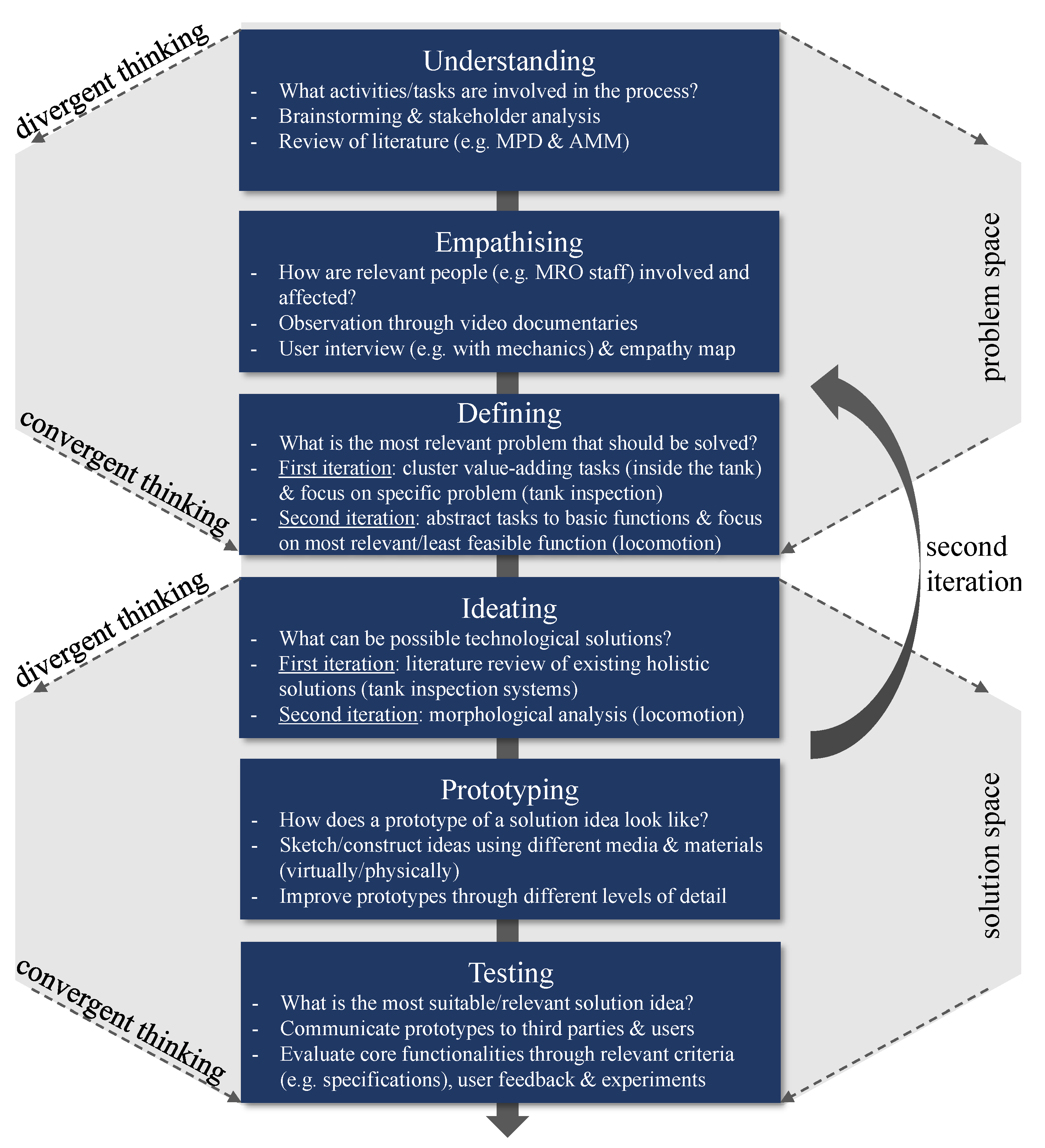
3. Design Methodology
3.1. Design Thinking Approach
3.2. First Iteration Loop
3.2.1. Problem Space
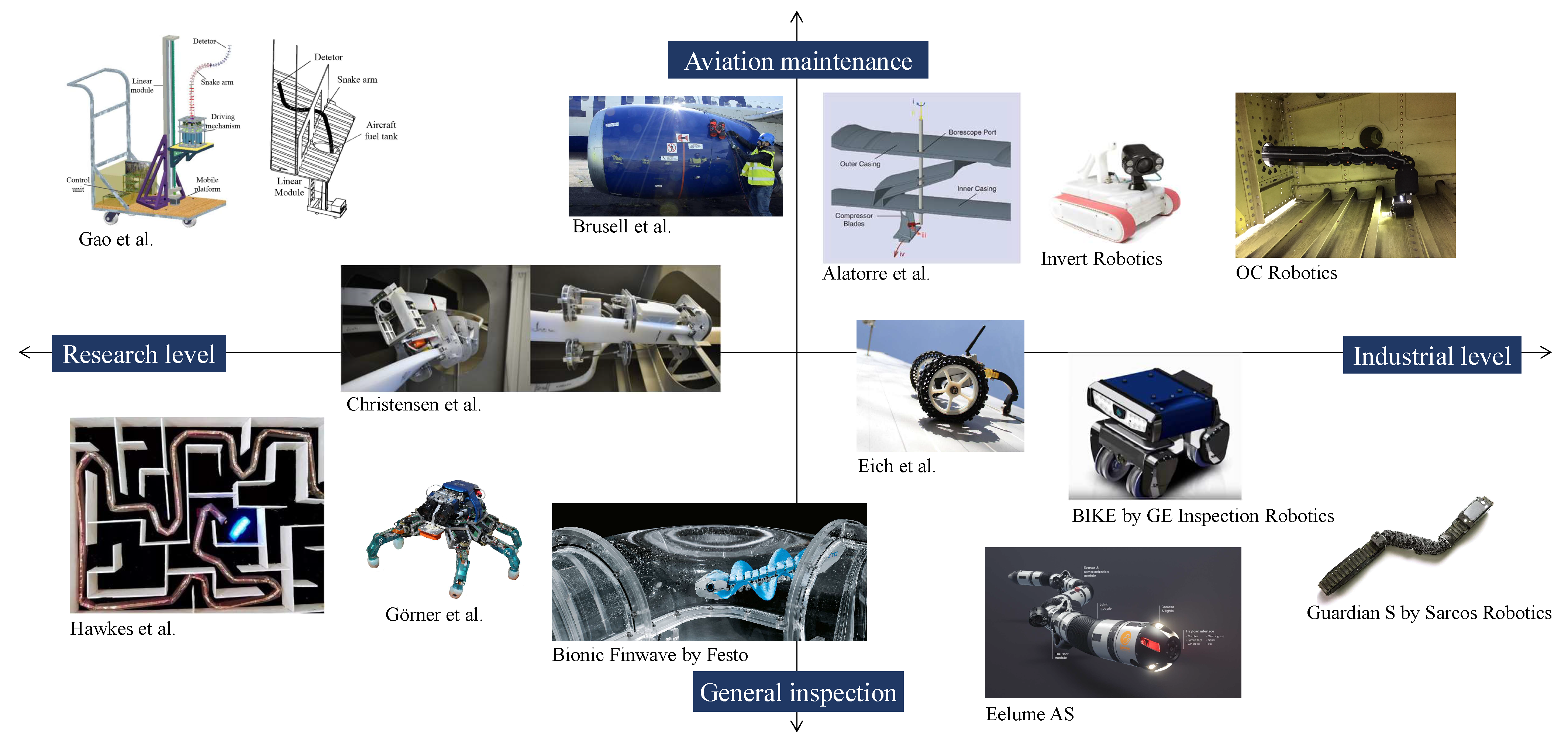
3.2.2. Solution Space
3.3. Second Iteration Loop
3.3.1. Problem Space
3.3.2. Solution Space
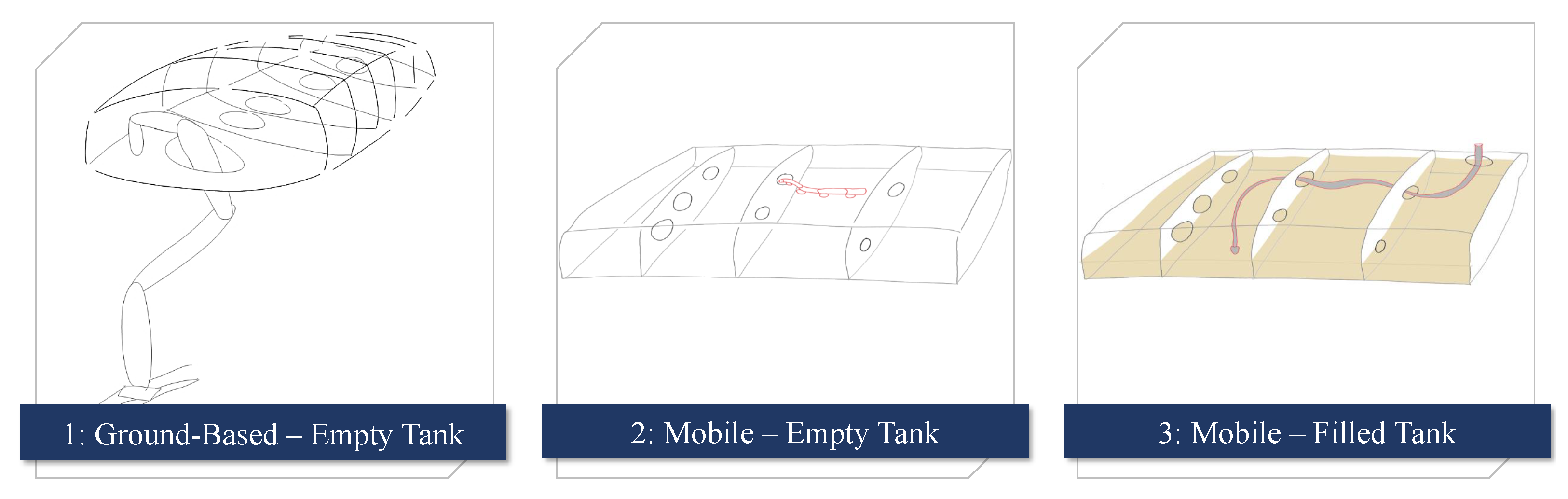
3.3.3. Presentation and Discussion of Locomotion Variants
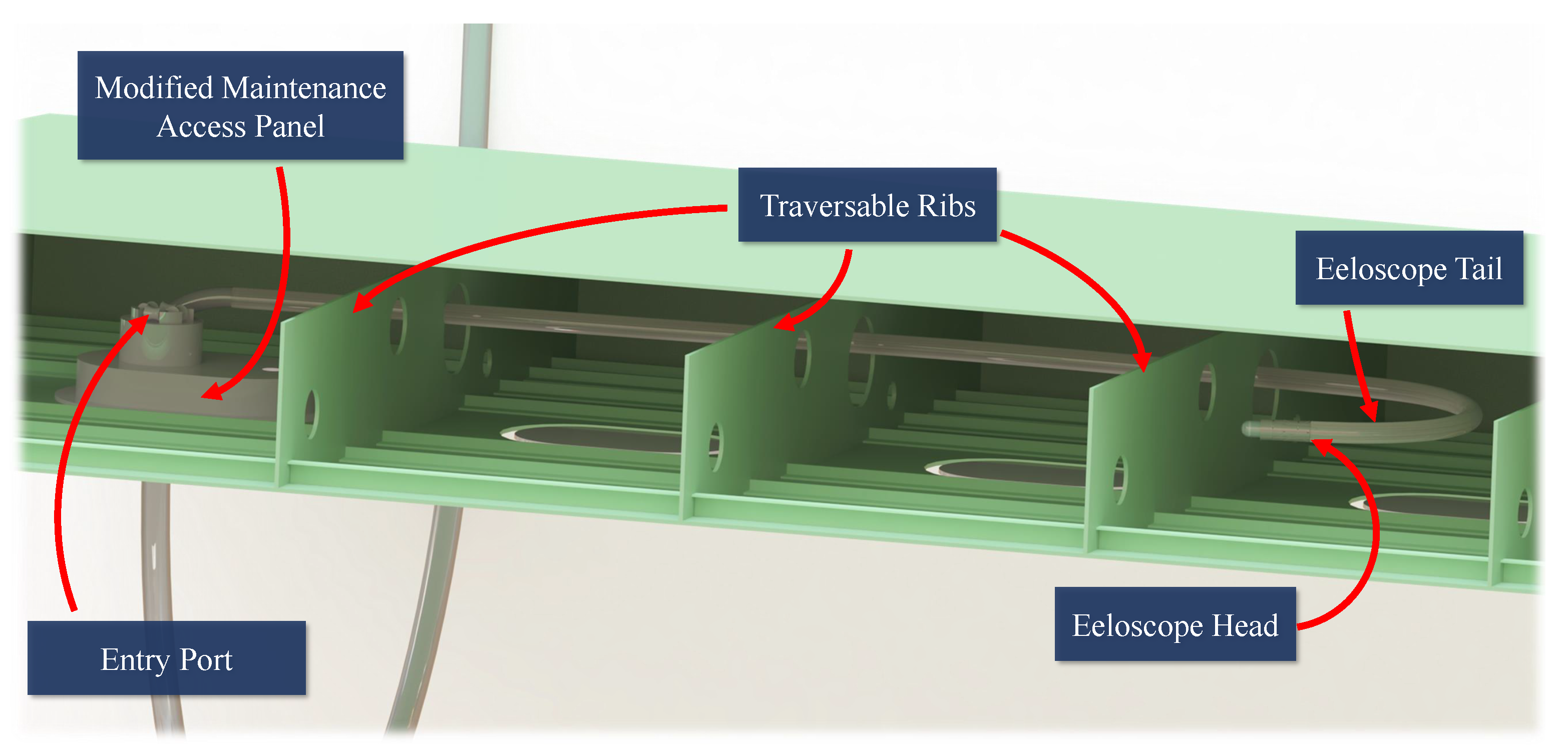
4. The Eeloscope Concept
4.1. Endoscopic Probe Design and Locomotion Technique
4.2. Wing Tank Access
4.3. Pump Unit
4.4. Human Machine Interface
5. Experimental Evaluation
5.1. Experimental Environment
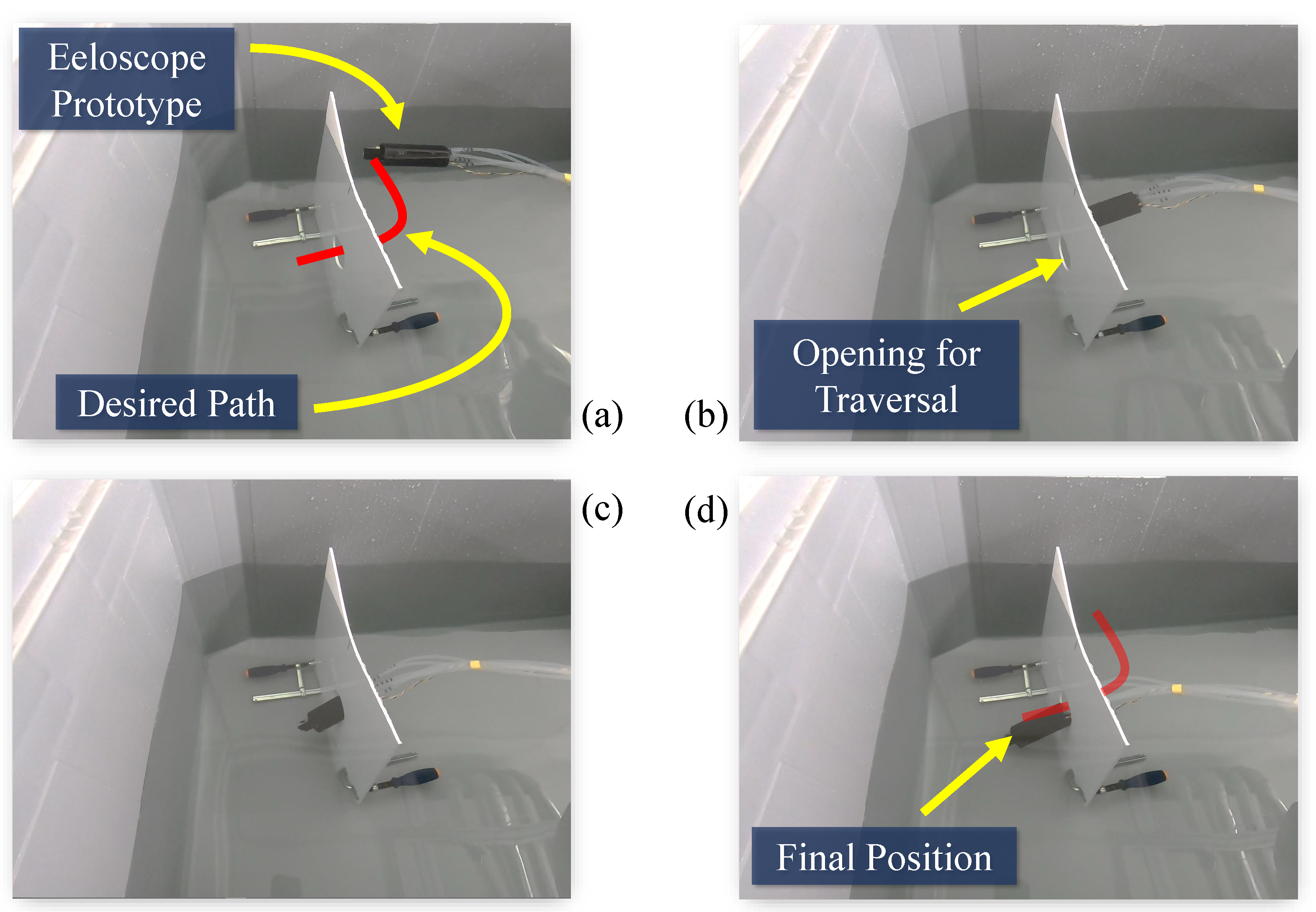
5.2. Basic Motion Experiments
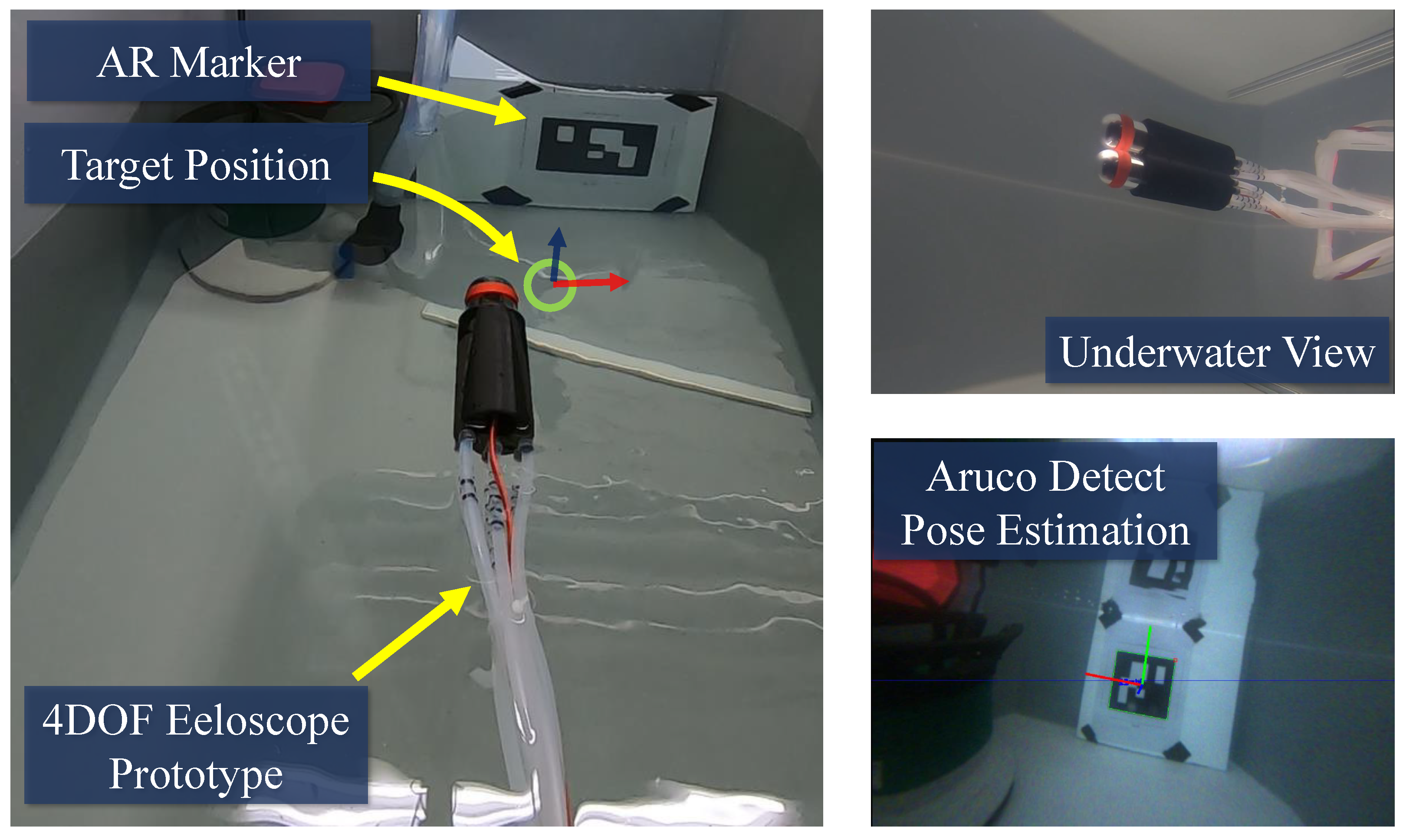
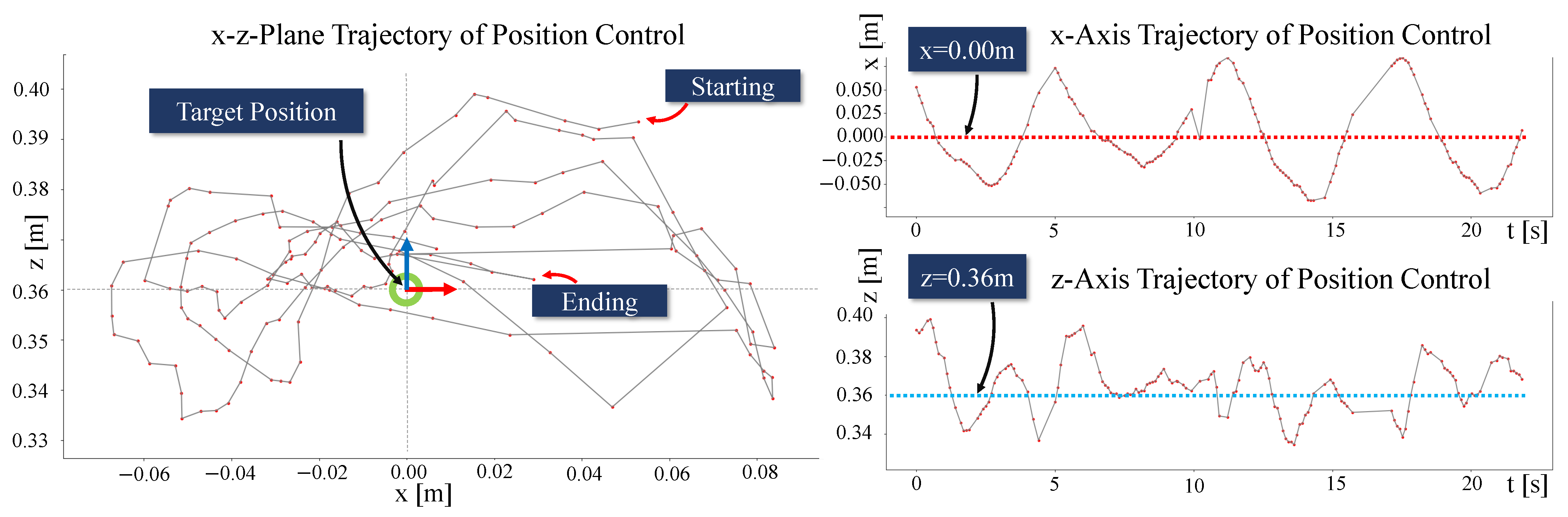
5.3. Camera-Based Position Control
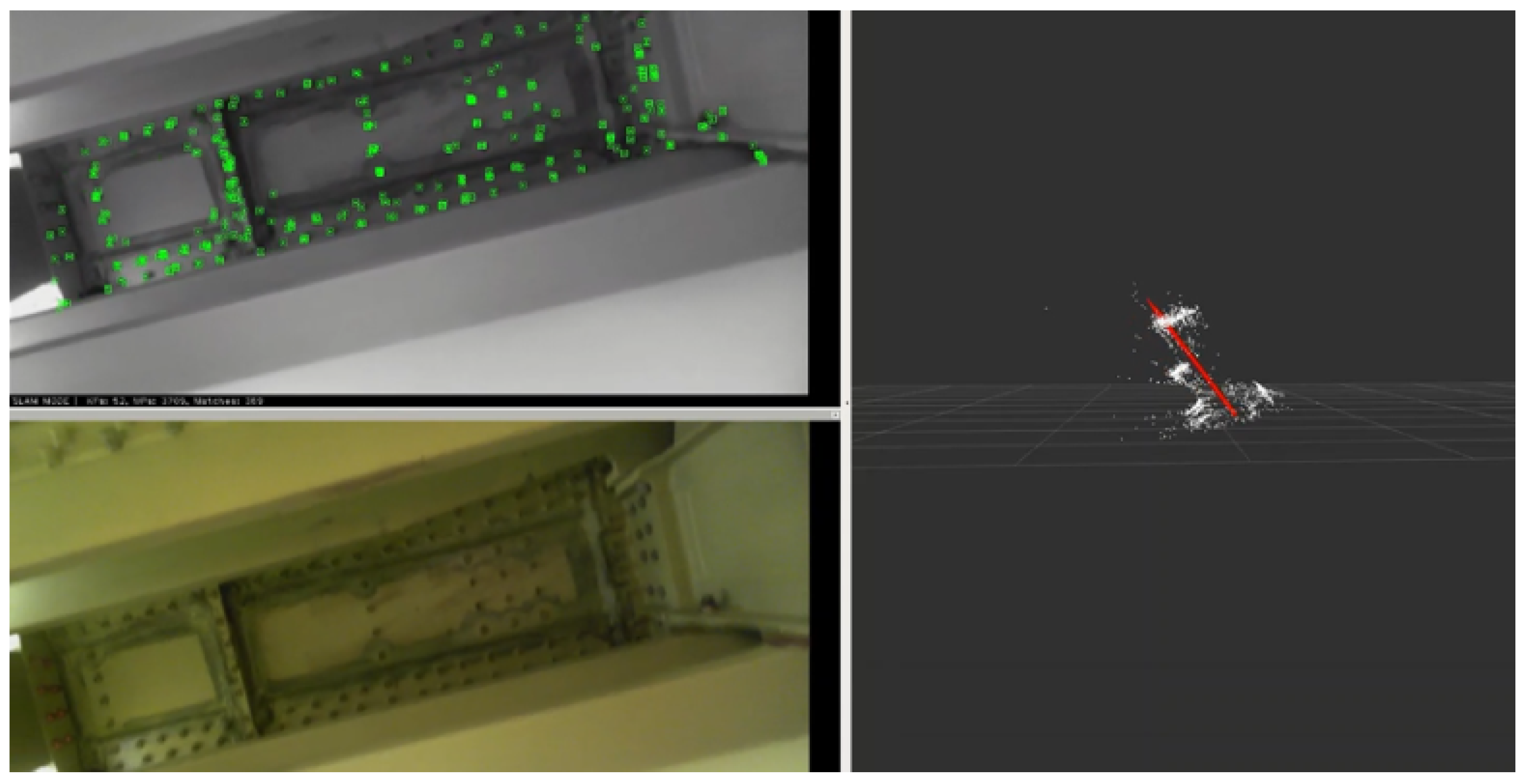
5.4. Monocular Visual SLAM within an Aircraft Wing Tank
6. Discussion and Outlook
6.1. Critical Review Regarding Problem Dimensions
6.2. Critical Review Regarding System Requirements
6.3. Outlook—Eeloscope as a Decision Support System
7. Conclusions
8. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| MRO | Maintenance, repair and overhaul |
| FAA | Federal Aviation Administration |
| EASA | European Union Aviation Safety Agency |
| MPD | Maintenance planning document |
| AMM | Aircraft maintenance manual |
| GVI | General visual inspection |
| VCK | Visual check |
| EWIS | Electrical wiring interconnection system |
| DT | Design Thinking |
| R&D | Research and Development |
| DoF | Degrees of freedom |
| SLAM | Simultaneous localization and mapping |
References
- National Transportation Safety Board Aircraft Accident Report TWA 800. Available online: https://lessonslearned.faa.gov/TWA800/TWA800NTSBreport.pdf (accessed on 29 March 2021).
- Aircraft Accident Report Thai Airways Flight 114. Available online: https://www.fss.aero/accident-reports/dvdfiles/TH/2001-03-03-TH.pdf (accessed on 29 March 2021).
- Certification Specifications for Large Aeroplanes CS-25. Available online: https://www.easa.europa.eu/sites/default/files/dfu/CS-25%20Amdt%207%20%28combined%29%20%28%2B%20header%29.pdf (accessed on 29 March 2021).
- Hill, E.C.; Hill, G.C. Microbial Contamination and Associated Corrosion in Fuels, during Storage, Distribution and Use. AMR 2008, 38, 257–268. [Google Scholar] [CrossRef]
- FAA AC. Available online: https://www.faa.gov/documentLibrary/media/Advisory_Circular/AC%20120-98A.pdf (accessed on 29 March 2021).
- Airbus A320 Maintenance Planning Document (MPD). Available online: https://de.scribd.com/document/394485679/mpd-a320-pdf (accessed on 29 March 2021).
- Carlton, G.N.; Smith, L.B. Exposures to jet fuel and benzene during aircraft fuel tank repair in the U.S. Air Force. Appl. Occup. Environ. Hyg. 2000, 15, 485–491. [Google Scholar] [CrossRef] [PubMed]
- Pleil, J.D.; Smith, L.B.; Zelnick, S.D. Personal exposure to JP-8 jet fuel vapors and exhaust at air force bases. Environ. Health Perspect. 2000, 108, 183–192. [Google Scholar] [CrossRef] [PubMed]
- Ritchie, G.; Still, K.; Rossi, J.; Bekkedal, M.; Bobb, A.; Arfsten, D. Biological and health effects of exposure to kerosene-based jet fuels and performance additives. J. Toxicol. Environ. Health B Crit. Rev. 2003, 6, 357–451. [Google Scholar] [CrossRef] [PubMed]
- D’Este, C.; Attia, J.R.; Brown, A.M.; Gibson, R.; Gibberd, R.; Tavener, M.; Guest, M.; Horsley, K.; Harrex, W.; Ross, J. Cancer incidence and mortality in aircraft maintenance workers. Am. J. Ind. Med. 2008, 51, 16–23. [Google Scholar] [CrossRef] [PubMed]
- Airbus Skywise Platform. Available online: https://skywise.airbus.com/ (accessed on 28 April 2021).
- Lufthansa Technik Aviatar. Available online: https://www.lufthansa-technik.com/de/aviatar (accessed on 28 April 2021).
- General Electric Digital Predix Platform. Available online: https://www.ge.com/digital/iiot-platform (accessed on 28 April 2021).
- Meinel, C.; Leifer, L. Design Thinking Research. In Design Thinking: Understand—Improve—Apply; Plattner, H., Meinel, C., Leifer, L., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. xiii–xxi. ISBN 978-3-642-13756-3. [Google Scholar]
- Hasso Plattner Institute for Digital Engineering gGmbH. The Six Phases of the Design Thinking Process. Available online: https://hpi.de/en/school-of-design-thinking/design-thinking/background/design-thinking-process.html (accessed on 24 March 2021).
- Plattner, H.; Meinel, C.; Weinberg, U. Design Thinking: Innovation Lernen; Ideenwelten Offnen; mi-FinanzBuch Verl.: München, Germany, 2009; ISBN 978-3868800135. [Google Scholar]
- Lindberg, T.; Meinel, C.; Wagner, R. Design Thinking: A Fruitful Concept for IT Development? In Design Thinking: Understand—Improve—Apply; Plattner, H., Meinel, C., Leifer, L., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 3–18. ISBN 978-3-642-13756-3. [Google Scholar]
- Lawson, B. How Designers Think: The Design Process Demystified, 4th ed.; ElsevierArchitectural Press: Amsterdam, The Netherlands, 2006; ISBN 9780750660778. [Google Scholar]
- Anscombe, R.; Bryant, A.; Buckingham, R.; Ferguson, G.; Graham, A.; Lichon, M.; Parry, N.; Brandrick, P.; Redman, M.; Summers, M.; et al. Snake-Arm Robots: A New Approach to Aircraft Assembly. In Proceedings of the Aerospace Manufacturing and Automated Fastening Conference and Exhibition, Toulouse, France, 11–14 September 2006; SAE International: Warrendale, PA, USA, 2006. [Google Scholar] [CrossRef]
- Gao, Q.J.; Wang, W.J.; Niu, G.C. Design Bionic Structure and Analysis of Kinematics for Aircraft Fuel Tank Inspection Robot. AMM 2013, 278–280, 594–598. [Google Scholar] [CrossRef]
- Alatorre, D.; Nasser, B.; Rabani, A.; Nagy-Sochacki, A.; Dong, X.; Axinte, D.; Kell, J. Teleoperated, In Situ Repair of an Aeroengine: Overcoming the Internet Latency Hurdle. IEEE Robot. Automat. Mag. 2019, 26, 10–20. [Google Scholar] [CrossRef]
- Wang, M.; Palmer, D.; Dong, X.; Alatorre, D.; Axinte, D.; Norton, A. Design and Development of a Slender Dual-Structure Continuum Robot for In-Situ Aeroengine Repair. In Proceedings of the Towards a Robotic Society, 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems, Madrid, Spain, 1–5 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 5648–5653, ISBN 978-1-5386-8094-0. [Google Scholar]
- Brusell, A.; Andrikopoulos, G.; Nikolakopoulos, G. Vortex Robot Platform for Autonomous Inspection: Modeling and Simulation. In Proceedings of the 45th Annual Conference of the IEEE Industrial Electronics Society (IECON 2019), Lisbon, Portugal, 14–17 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 756–762, ISBN 978-1-7281-4878-6. [Google Scholar]
- Hawkes, E.W.; Blumenschein, L.H.; Greer, J.D.; Okamura, A.M. A soft robot that navigates its environment through growth. Sci. Robot. 2017, 2. [Google Scholar] [CrossRef] [PubMed]
- Festo. Available online: https://www.festo.com/PDF_Flip/corp/Festo_BionicFinWave/en/ (accessed on 28 March 2021).
- Christensen, L.; Fischer, N.; Kroffke, S.; Lemburg, J.; Ahlers, R. Cost-Effective Autonomous Robots for Ballast Water Tank Inspection. J. Ship Product. Des. 2011, 27, 127–136. [Google Scholar]
- Waygate Technologies. Available online: https://inspection-robotics.com/bike/ (accessed on 28 March 2021).
- Kelasidi, E.; Liljeback, P.; Pettersen, K.Y.; Gravdahl, J.T. Innovation in Underwater Robots: Biologically Inspired Swimming Snake Robots. IEEE Robot. Automat. Mag. 2016, 23, 44–62. [Google Scholar] [CrossRef]
- Sarcos Robotics. Available online: https://www.sarcos.com/products/guardian-s/ (accessed on 28 March 2021).
- Eich, M.; Vogele, T. Design and control of a lightweight magnetic climbing robot for vessel inspection. In Proceedings of the 19th Mediterranean Conference on Control & Automation (MED), Corfu, Greece, 20–23 June 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1200–1205, ISBN 978-1-4577-0124-5. [Google Scholar]
- Gorner, M.; Wimbock, T.; Baumann, A.; Fuchs, M.; Bahls, T.; Grebenstein, M.; Borst, C.; Butterfass, J.; Hirzinger, G. The DLR-Crawler: A testbed for actively compliant hexapod walking based on the fingers of DLR-Hand II. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2008), Nice, France, 22–26 September 2008; IEEE Service Center: Piscataway, NJ, USA, 2008; pp. 1525–1531, ISBN 978-1-4244-2057-5. [Google Scholar]
- Mehling, J.S.; Diftler, M.A.; Chu, M.; Valvo, M. A Minimally Invasive Tendril Robot for In-Space Inspection. In Proceedings of the IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, Pisa, Italy, 20–22 February 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 690–695, ISBN 1-4244-0040-6. [Google Scholar]
- Takeichi, M.; Suzumori, K.; Endo, G.; Nabae, H. Development of a 20-m-long Giacometti arm with balloon body based on kinematic model with air resistance. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2018; IEEE: Piscataway, NJ, USA, 2017; pp. 2710–2716, ISBN 978-1-5386-2682-5. [Google Scholar]
- HiBot. Available online: https://www.hibot.co.jp/products/floatarm/ (accessed on 28 March 2021).
- Hirose, S.; Mori, M. Biologically Inspired Snake-like Robots. In In Proceedings of the 2004 IEEE International Conference on Robotics and Biomimetics, Shenyang, China, 22–26 August 2004; IEEE: Piscataway, NJ, USA, 2004; pp. 1–7, ISBN 0-7803-8614-8. [Google Scholar]
- Debenest, P.; Guarnieri, M.; Hirose, S. PipeTron series—Robots for pipe inspection. In Proceedings of the 2014 3rd International Conference on Applied Robotics for the Power Industry (CARPI), Foz do Iguassu, Brazil, 14–16 October 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–6, ISBN 978-1-4799-6422-2. [Google Scholar]
- Wright, C.; Buchan, A.; Brown, B.; Geist, J.; Schwerin, M.; Rollinson, D.; Tesch, M.; Choset, H. Design and architecture of the unified modular snake robot. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Saint Paul, MN, USA, 14–18 May 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 4347–4354, ISBN 978-1-4673-1405-3. [Google Scholar]
- Rico, J.A.S.; Endo, G.; Hirose, S.; Yamada, H. Development of an actuation system based on water jet propulsion for a slim long-reach robot. Robomech. J. 2017, 4, 1–17. [Google Scholar] [CrossRef]
- Caprara, R.; Obstein, K.L.; Scozzarro, G.; Di Natali, C.; Beccani, M.; Morgan, D.R.; Valdastri, P. A platform for gastric cancer screening in low- and middle-income countries. IEEE Trans. Biomed. Eng. 2015, 62, 1324–1332. [Google Scholar] [CrossRef] [PubMed]
- Ishii, A.; Ambe, Y.; Yamauchi, Y.; Ando, H.; Konyo, M.; Tadakuma, K.; Tadokoro, S. Design and Development of Biaxial Active Nozzle with Flexible Flow Channel for Air Floating Active Scope Camera. In Proceedings of the Towards a Robotic Society, 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems, Madrid, Spain, 1–5 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 442–449, ISBN 978-1-5386-8094-0. [Google Scholar]
- Garrido-Jurado, S.; Muñoz-Salinas, R.; Madrid-Cuevas, F.J.; Marín-Jiménez, M.J. Automatic generation and detection of highly reliable fiducial markers under occlusion. Pattern Recognit. 2014, 47, 2280–2292. [Google Scholar] [CrossRef]
- Quigley, M.; Gerkey, B.; Conley, K.; Faust, J.; Foote, T.; Leibs, J.; Berger, E.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In Proceedings of the Open-Source Software workshop of the International Conference on Robotics and Automation (ICRA), Kobe, Japan, 12–17 May 2009. [Google Scholar]
- Mur-Artal, R.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM: A Versatile and Accurate Monocular SLAM System. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Heilemann, F.; Dadashi, A.; Wicke, K. Eeloscope—Towards a Novel Endoscopic System Enabling Digital Aircraft Fuel Tank Maintenance. Aerospace 2021, 8, 136. https://doi.org/10.3390/aerospace8050136
Heilemann F, Dadashi A, Wicke K. Eeloscope—Towards a Novel Endoscopic System Enabling Digital Aircraft Fuel Tank Maintenance. Aerospace. 2021; 8(5):136. https://doi.org/10.3390/aerospace8050136
Chicago/Turabian StyleHeilemann, Florian, Alireza Dadashi, and Kai Wicke. 2021. "Eeloscope—Towards a Novel Endoscopic System Enabling Digital Aircraft Fuel Tank Maintenance" Aerospace 8, no. 5: 136. https://doi.org/10.3390/aerospace8050136
APA StyleHeilemann, F., Dadashi, A., & Wicke, K. (2021). Eeloscope—Towards a Novel Endoscopic System Enabling Digital Aircraft Fuel Tank Maintenance. Aerospace, 8(5), 136. https://doi.org/10.3390/aerospace8050136