
Nonlinear Aeroelastic Simulations and Stability Analysis of the Pazy Wing Aeroelastic Benchmark


Abstract
:1. Introduction
2. Simulation Framework and Modelling Approach
2.1. Implementation of the Steady and Unsteady Vortex Lattice Method
- It is computationally less expensive and faster than other solutions such as Euler or CFD codes, which typically require high mesh resolutions.
- The method represents a medium-fidelity tool that incorporates 3D effects and interferences between wakes and lifting surfaces, which are neglected in 2D strip theory.
- The results are insensitive to large deformations in contrast to the doublet lattice method (DLM), which is a linear method restricted to small out-of-plane displacements.
2.2. Linearisation of the Aeroelastic Model
2.2.1. Derivation of the Linearised Aerodynamic Model
2.2.2. Derivation of the Linearised Aeroelastic Model
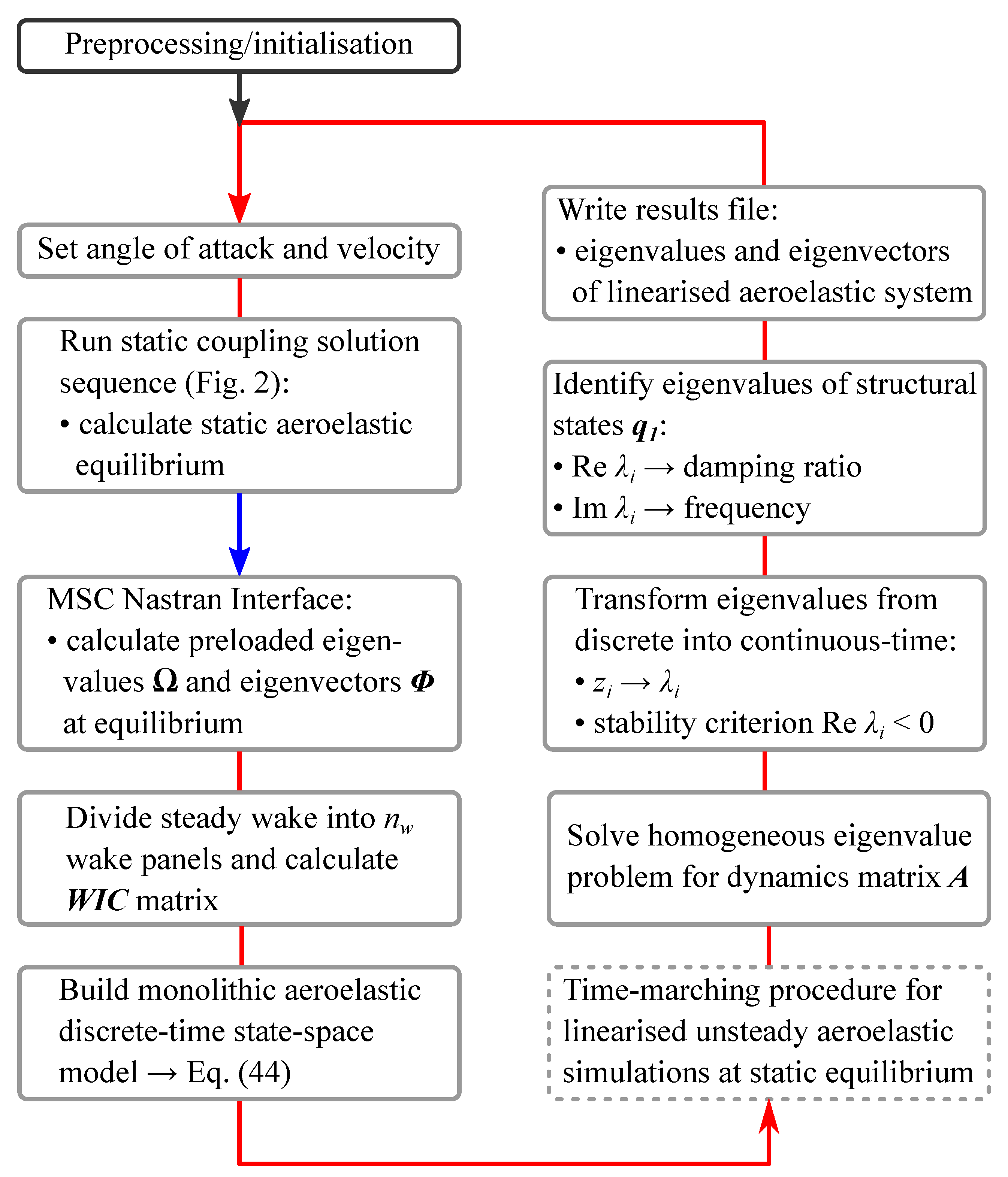
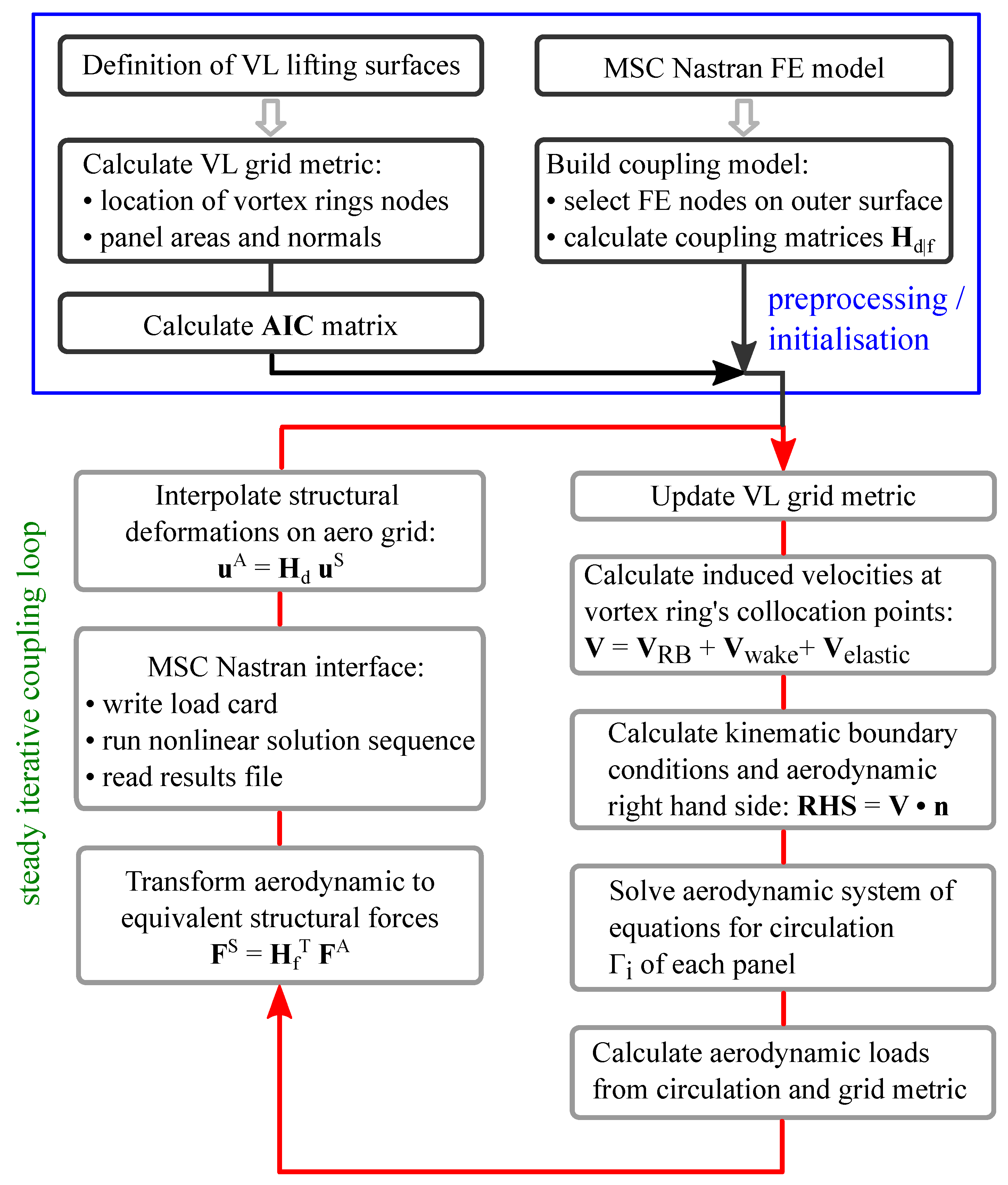
2.3. Aeroelastic Framework and Solution Sequence
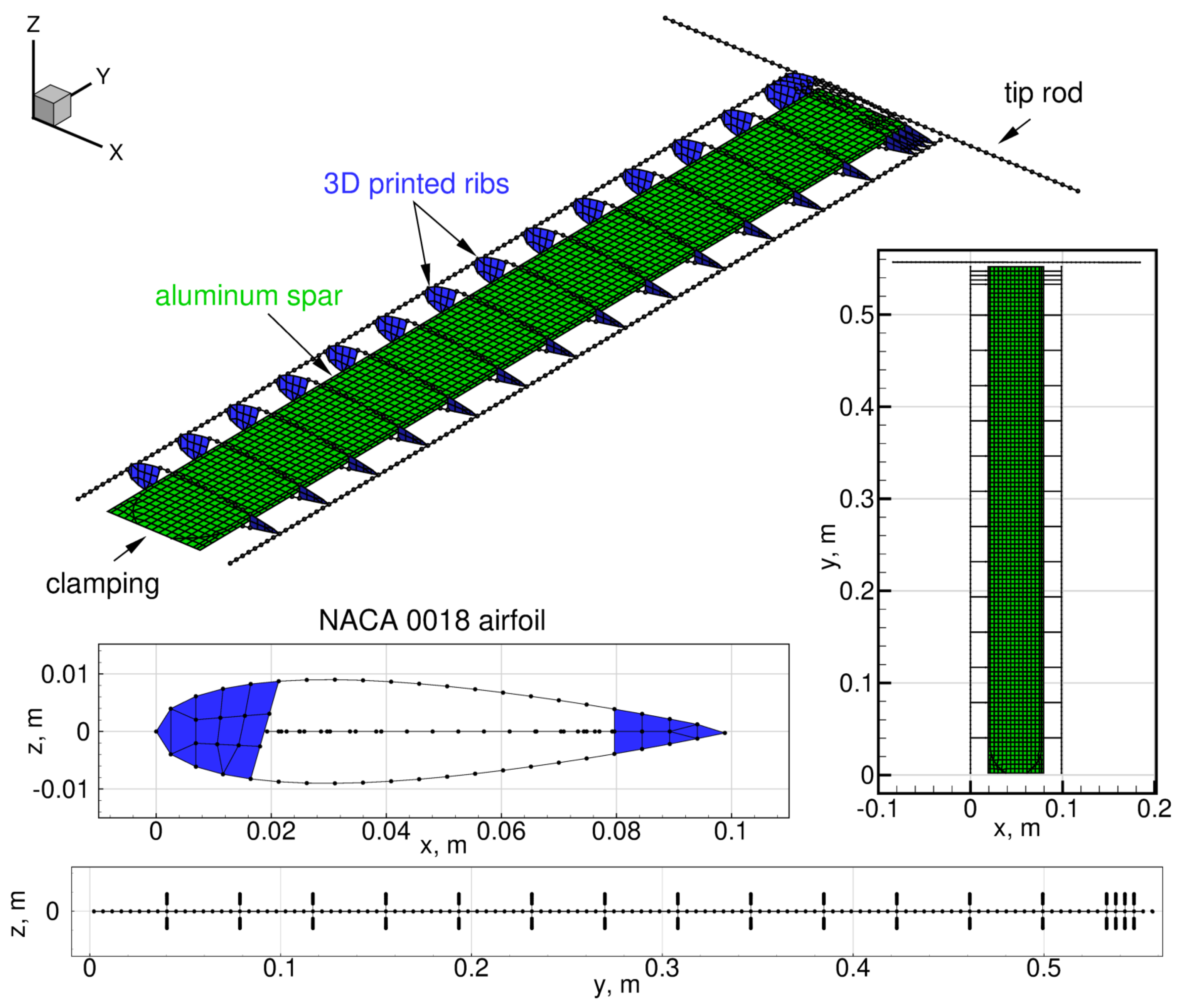
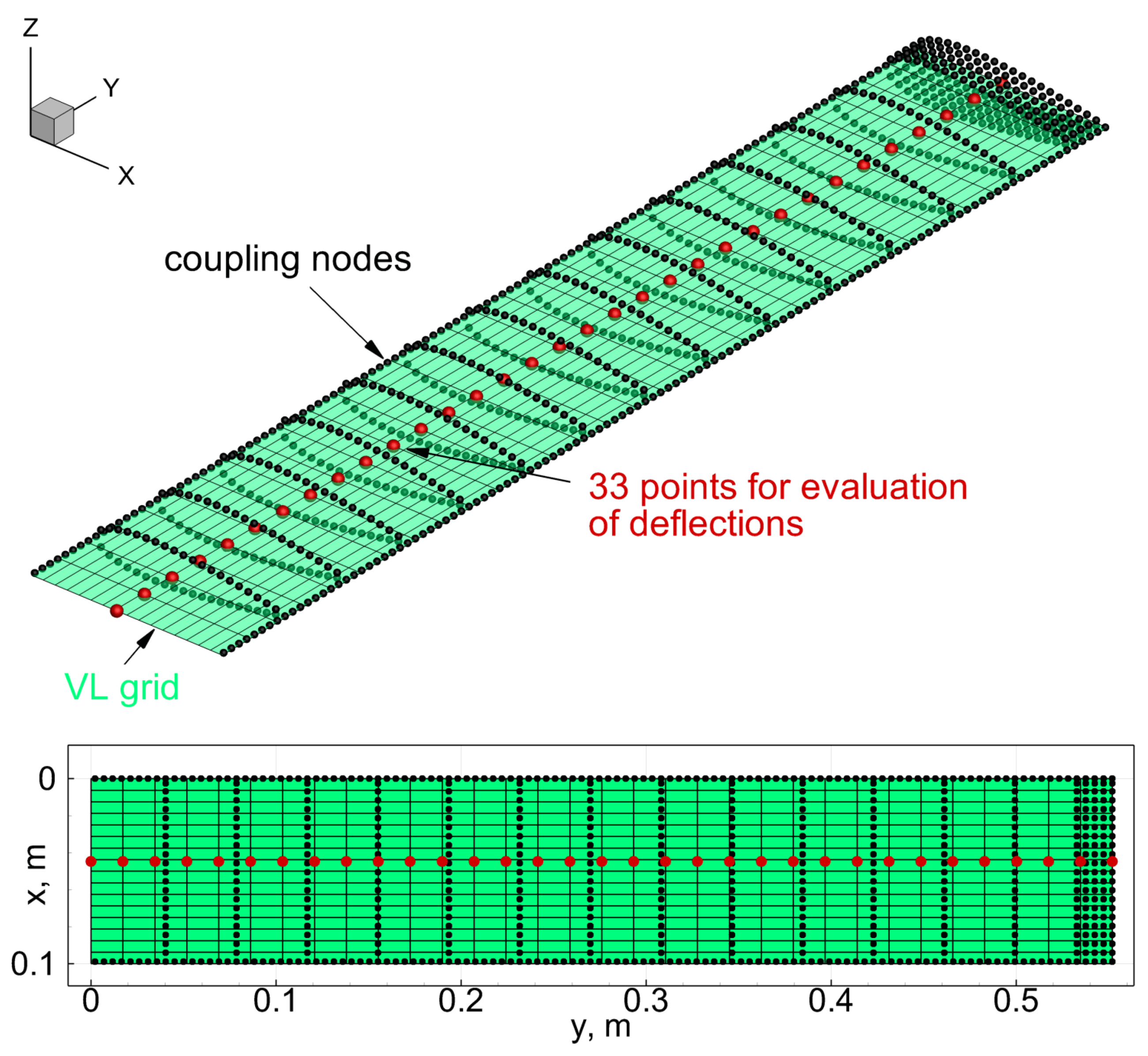
2.4. Structural and Aerodynamic Simulation Models
3. Numerical Simulations and Results
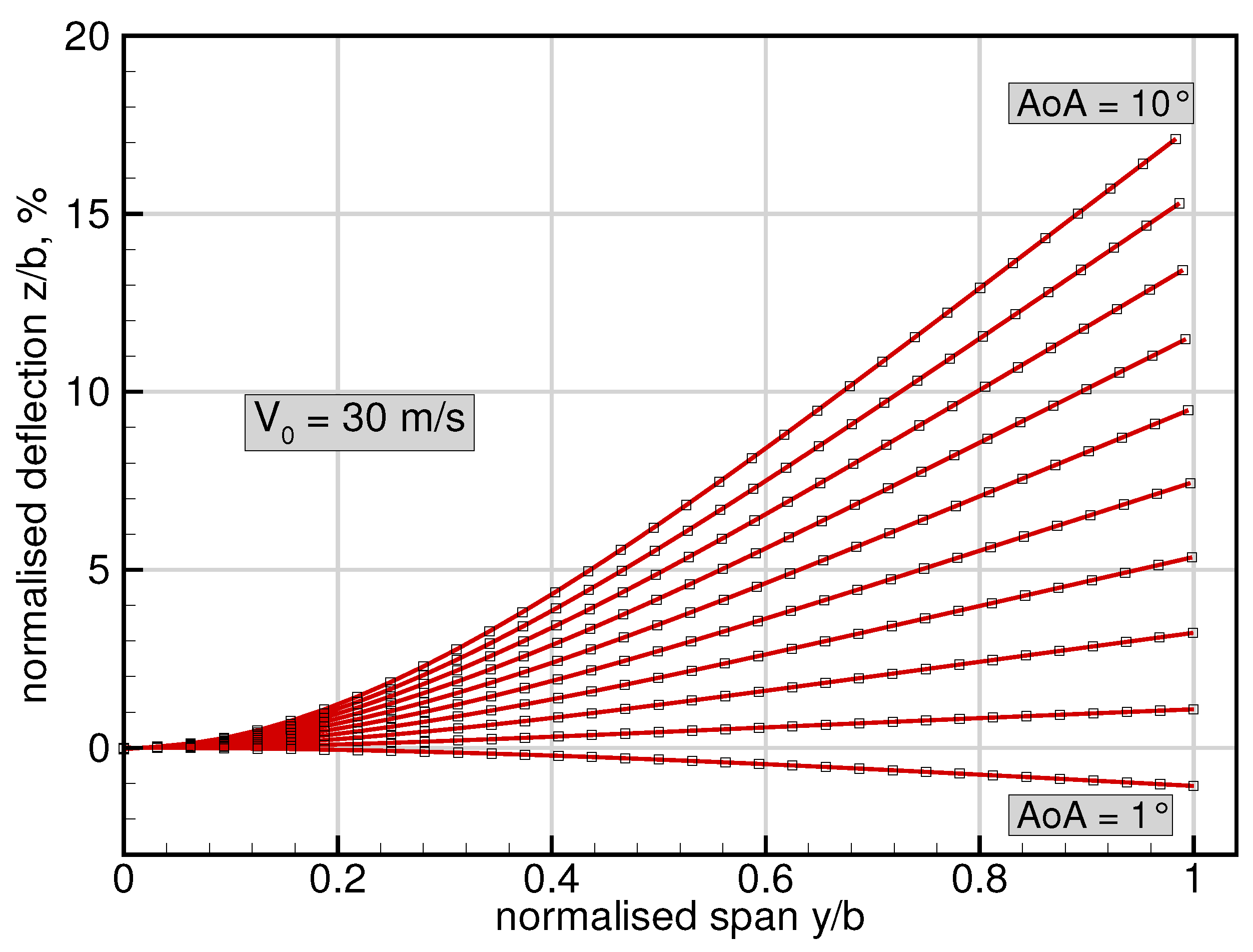
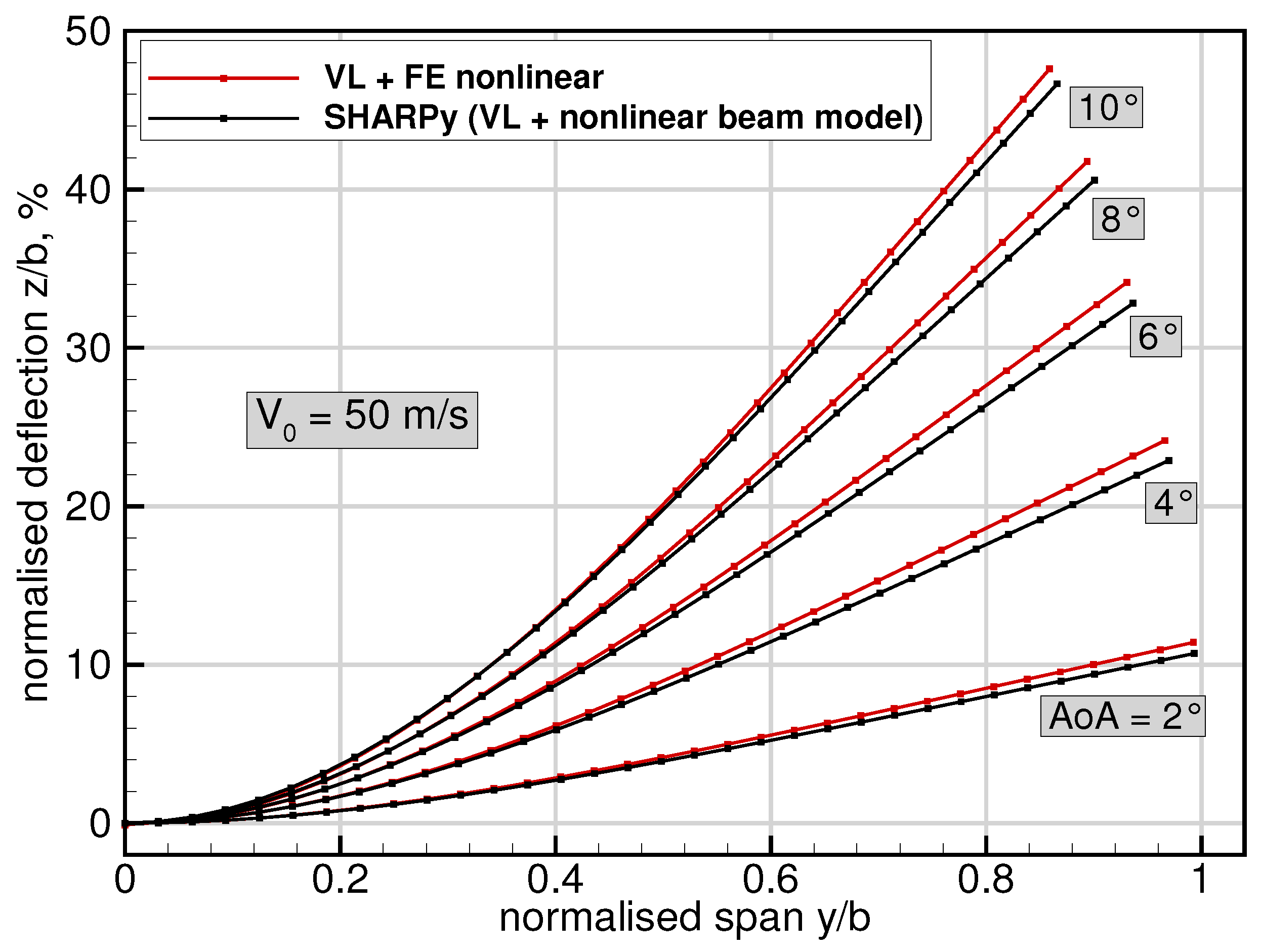
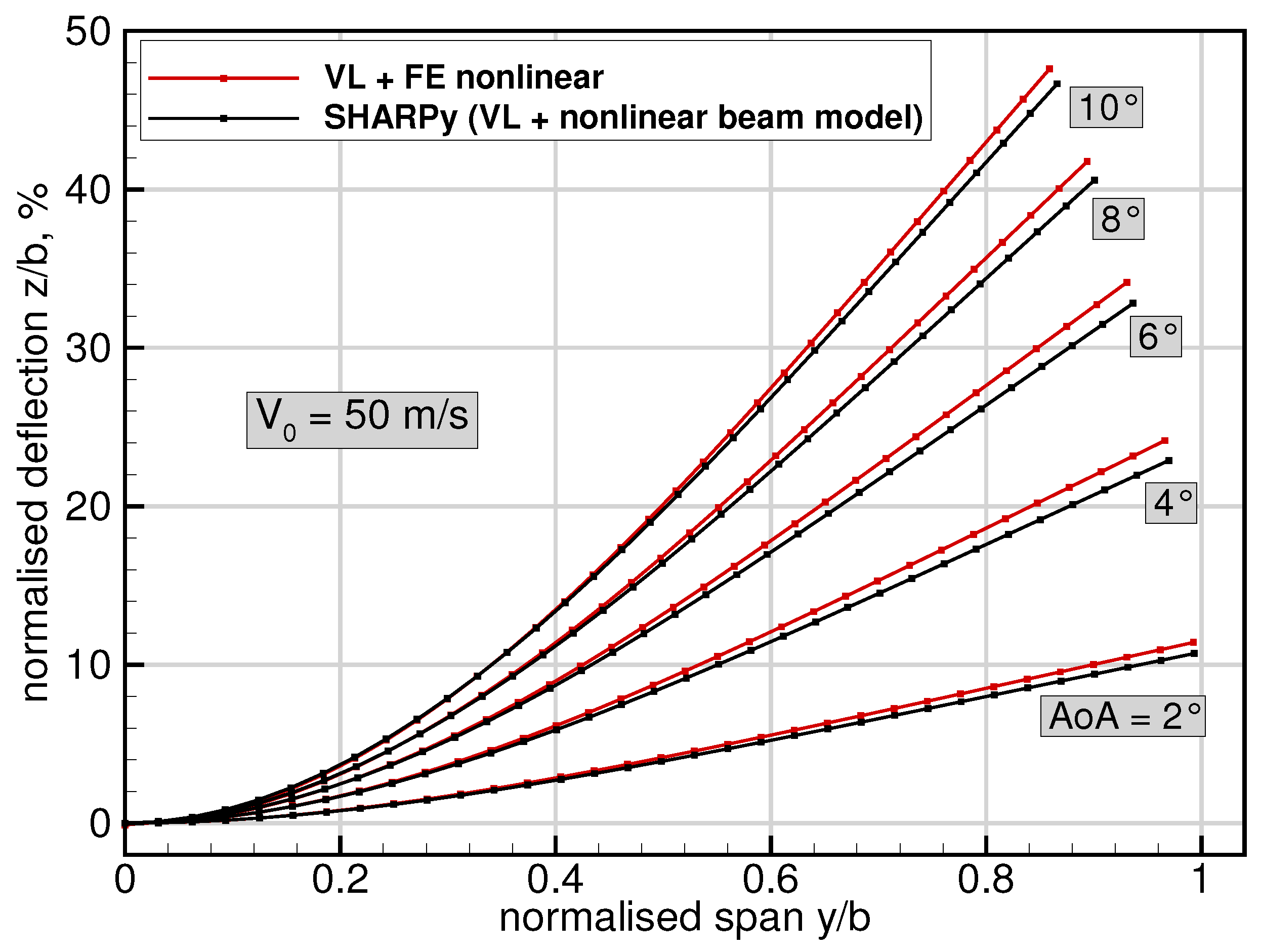
3.1. Static Coupling Simulations
3.2. Influence of Geometric Nonlinearities on Modal Properties
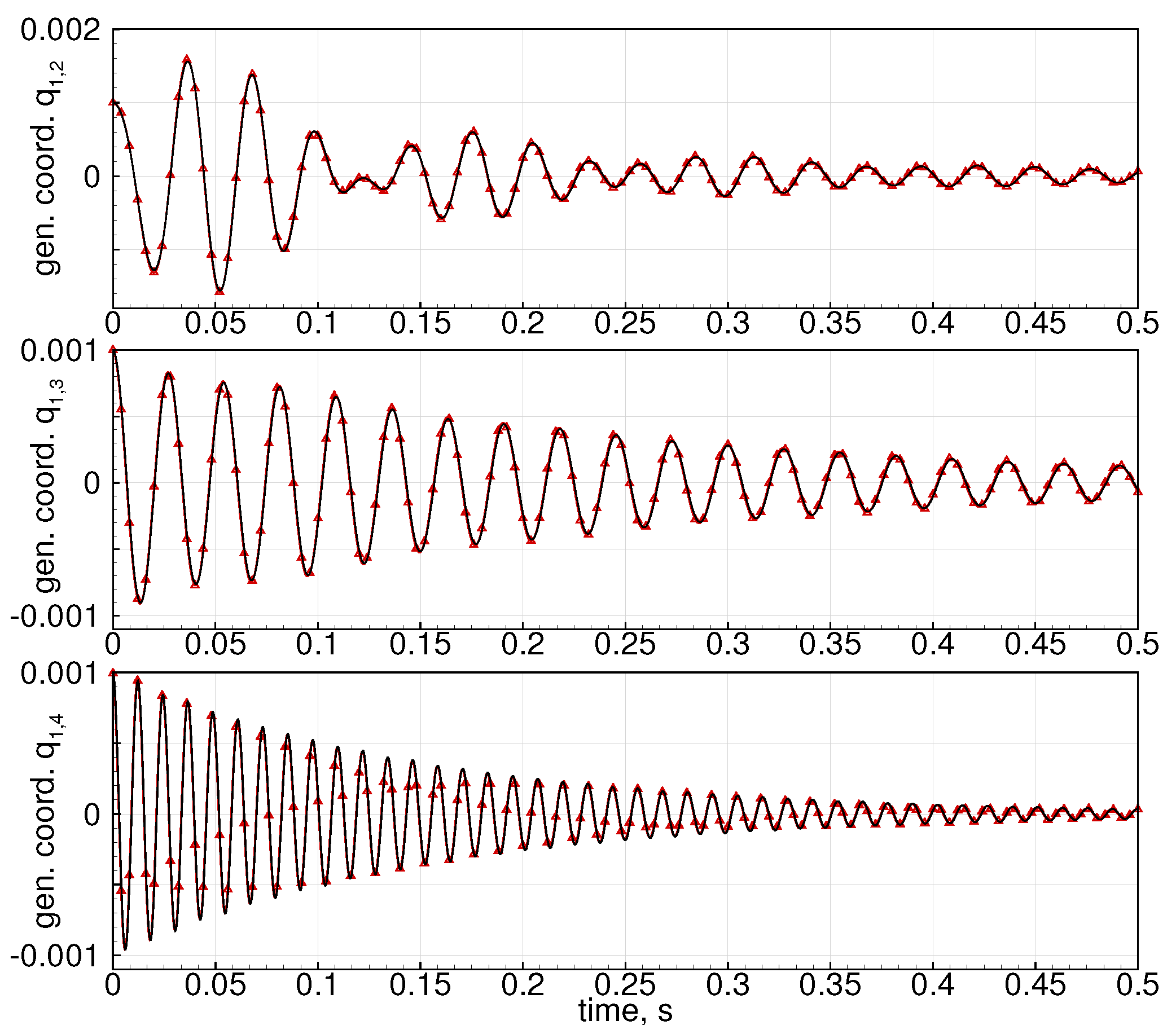
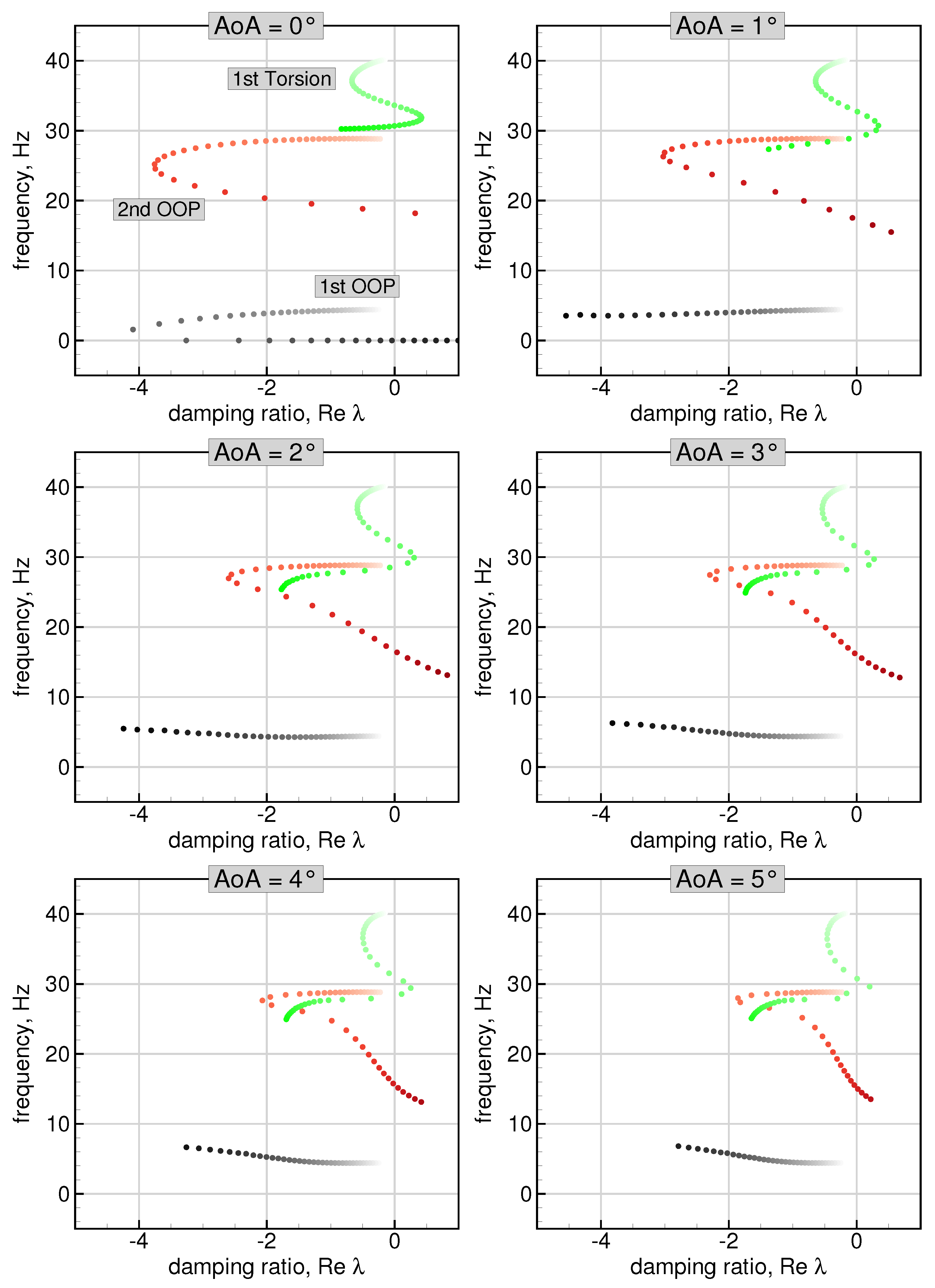
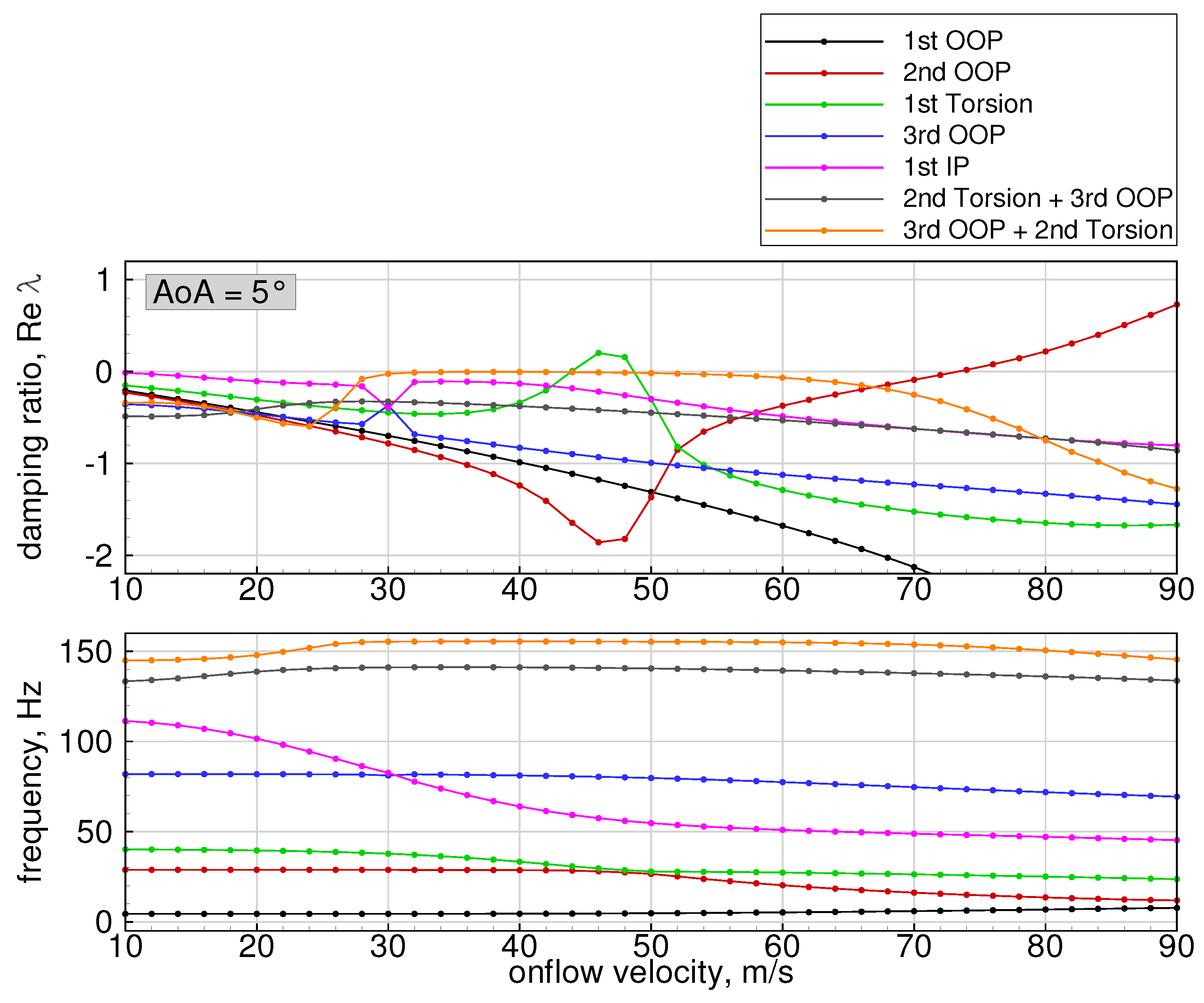
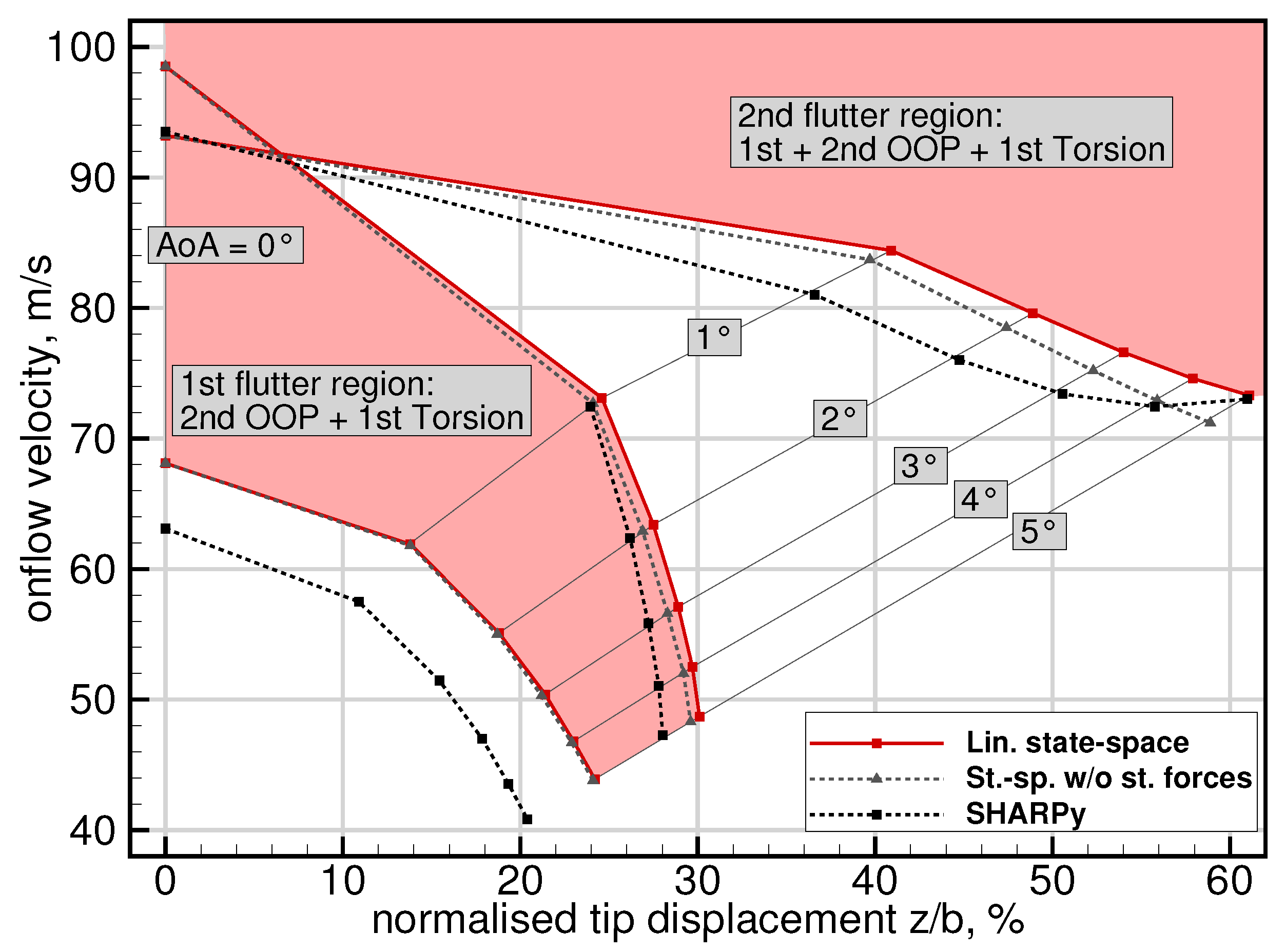
3.3. Stability Analysis Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Acronyms | |
| AePW3 | Third Aeroelastic Prediction Workshop |
| CFD | Computational Fluid Dynamics |
| DLR | German Aerospace Center |
| DOF | Degree of Freedom |
| FE | Finite Element |
| FSI | Fluid Structure Interaction |
| IP | In-plane |
| LCO | Limit Cycle Oscillation |
| LDWG | Large Deflection Working Group |
| OOP | Out-of-plane |
| SHARPy | Simulation of High-Aspect Ratio aeroplanes in Python |
| VLM | Vortex Lattice Method |
| Nomenclature | |
| Area of aerodynamic panel | |
| b | Wing span |
| z | Eigenvalue of discrete-time state-space system |
| Time step size | |
| Eigenvalue of continuous-time state-space system | |
| Fluid density | |
| Natural frequency | |
| Velocity potential | |
| Dynamics matrix | |
| Aerodynamic influence coefficients matrix | |
| Control/Input matrix | |
| Sensor/Output matrix | |
| Direct term/Feed-through matrix | |
| Force vector of aerodynamic panel | |
| Generalised forces vector | |
| Coupling matrix | |
| Identity matrix | |
| Shifting matrix for wake-shedding process; Interpolation matrix | |
| Normal vector of aerodynamic panel | |
| Vector of generalised coordinates | |
| Quarter chord line vector of aerodynamic panel | |
| Vector of kinematic boundary conditions at collocation points of aerodynamic panels | |
| Input vector | |
| Velocity vector of aerodynamic panel | |
| Wake influence coefficients matrix | |
| State vector | |
| Output vector | |
| Vector of circulations of aerodynamic panels | |
| Eigenvectors of structural modes | |
| Indices | |
| A | aerodynamic |
| b | bound |
| c | w.r.t. collocation point |
| d | displacement transfer; induced drag component |
| effective | |
| elastic | |
| f | force transfer |
| n | discrete time step |
| q | w.r.t. quarter point |
| rigid body | |
| s | steady component |
| S | structural |
| u | unsteady component |
| w | wake |
| 0 | conditions at static aeroelastic equilibrium |
| equivalent matrix of a vector in blockwise diagonal form | |
| first time derivative |
References
- Ritter, M.; Dillinger, J.; Meddaikar, Y.M. Static and dynamic aeroelastic validation of a flexible forward swept composite wing. In Proceedings of the 58th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar]
- Avin, O.; Drachinsky, A.; Ben-Shmuel, Y.; Raveh, D. Design of an experimental benchmark of a highly flexible wing. In Proceedings of the 60th Israel Annual Conference on Aerospace Sciences, Tel Aviv/Haifa, Israel, 4–5 March 2020. [Google Scholar]
- Zimmer, M. Integral design and optimisation process for a highly flexible generic long range jet transport with flight mechanic derivative constraints. In Proceedings of the AIAA Scitech 2021 Forum, Reston, VA, USA, 11–21 January 2021. [Google Scholar]
- Ritter, M.; Hilger, J.; Zimmer, M. Static and dynamic simulations of the Pazy wing aeroelastic benchmark by nonlinear potential aerodynamics and detailed FE model. In Proceedings of the AIAA Scitech 2021 Forum, Reston, VA, USA, 11–21 January 2021. [Google Scholar]
- Cesnik, C.E.; Senatore, P.J.; Su, W.; Atkins, E.M.; Shearer, C.M. X-HALE: A Very Flexible Unmanned Aerial Vehicle for Nonlinear Aeroelastic Tests. AIAA J. 2012, 50, 2820–2833. [Google Scholar] [CrossRef] [Green Version]
- Ritter, M. An Extended Modal Approach for Nonlinear Aeroelastic Simulations of Highly Flexible Aircraft Structures. Ph.D. Thesis, TU Berlin, Berlin, Germany, 2018. [Google Scholar]
- Noll, T.E.; Brown, J.M.; Perez-Davis, M.E.; Ishmael, S.D.; Tiffany, G.C.; Gaier, M. Investigation of the Helios Prototype Aircraft Mishap: Volume I Mishap Report; NASA Langley Research Center: Hampton, VA, USA, 2001. [Google Scholar]
- Cea, A.; Palacios, R. Nonlinear modal aeroelastic analysis from large industrial-scale models. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar]
- Ritter, M.; Cesnik, C.E.; Krüger, W.R. An enhanced modal approach for large deformation modeling of wing-like structures. In Proceedings of the 56th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Kissimmee, FL, USA, 5–9 January 2015. [Google Scholar]
- Tang, D.; Dowell, E.H. Experimental and Theoretical Study on Aeroelastic Response of High-Aspect-Ratio Wings. AIAA J. 2001, 39, 1430–1441. [Google Scholar] [CrossRef]
- Xie, C.; Liu, Y.; Yang, C.; Cooper, J.E. Geometrically Nonlinear Aeroelastic Stability Analysis and Wind Tunnel Test Validation of a Very Flexible Wing. Shock Vib. 2016, 2016, 5090719. [Google Scholar] [CrossRef]
- AePW-3 Overview. Available online: https://nescacademy.nasa.gov/workshops/AePW3/public/ (accessed on 20 July 2021).
- Ritter, M.; Neumann, J.; Krüger, W.R. Aeroelastic Simulations of High Reynolds Number Aero Structural Dynamics Wind Tunnel Model. AIAA J. 2016, 54, 1962–1973. [Google Scholar] [CrossRef]
- Ritter, M.; Jones, J.; Cesnik, C.E. Free-flight Nonlinear Aeroelastic Simulations of the X-HALE UAV by an Extended Modal Approach. In Proceedings of the International Forum on Aeroelasticity and Structural Dynamics, Como, Italy, 25–28 June 2017. [Google Scholar]
- Palacios, R.; Murua, J.; Cook, R. Structural and Aerodynamic Models in Nonlinear Flight Dynamics of Very Flexible Aircraft. AIAA J. 2010, 48, 2648–2659. [Google Scholar] [CrossRef] [Green Version]
- Palacios, R. Nonlinear normal modes in an intrinsic theory of anisotropic beams. J. Sound Vib. 2011, 8, 1772–1792. [Google Scholar] [CrossRef] [Green Version]
- Shearer, C.M.; Cesnik, C.E. Nonlinear Flight Dynamics of Very Flexible Aircraft. J. Aircr. 2007, 44, 1528–1545. [Google Scholar] [CrossRef] [Green Version]
- Jones, J.; Cesnik, C.E. Nonlinear Aeroelastic Analysis of the X-56 Multi-Utility Aeroelastic Demonstrator. In Proceedings of the AIAA Scitech Forum, 15th Dynamics Specialists Conference, San Diego, CA, USA, 4–8 January 2016. [Google Scholar]
- Bathe, K.J. Finite Element Procedures, 2nd ed.; Klaus-Jürgen Bathe: Watertown, MA, USA, 2008. [Google Scholar]
- MSC Software. MSC Nastran 2017: Nonlinear User’s Guide SOL 400; MacNeal-Schwendler Corporation: Newport Beach, CA, USA, 2016. [Google Scholar]
- Murua, J.; Palacios, R.; Graham, J.M.R. Applications of the unsteady vortex-lattice method in aircraft aeroelasticity and flight dynamics. Prog. Aerosp. Sci. 2012, 55, 46–72. [Google Scholar] [CrossRef] [Green Version]
- Katz, J.; Plotkin, A. Low Speed Aerodynamics, 2nd ed.; Cambridge Aerospace Series; Cambridge University Press: Cambridge, UK, 2001; Volume 13. [Google Scholar]
- Mauermann, T. Flexible Aircraft Modelling for Flight Loads Analysis of Wake Vortex Encounters. Ph.D. Thesis, TU Braunschweig, Braunschweig, Germany, 2010. [Google Scholar]
- Beckert, A.; Wendland, H. Multivariate interpolation for fluid-structure-interaction problems using radial basis functions. Aerosp. Sci. Technol. 2001, 5, 125–134. [Google Scholar] [CrossRef]
- Hilger, J. Nonlinear Aeroelastic Simulations and Stability Analysis of a Highly Flexible Wing. Master’s Thesis, Hamburg University of Applied Sciences, Hamburg, Germany, 2021. [Google Scholar]
- Murua, J.; Martínez, P.; Climent, H.; van Zyl, L.; Palacios, R. T-tail flutter: Potential-flow modelling, experimental validation and flight tests. Prog. Aerosp. Sci. 2014, 71, 54–184. [Google Scholar] [CrossRef]
- Åström, K.J.; Murray, R.M. Feedback Systems: An Introduction for Scientists and Engineers; Princeton University Press: Princeton, NJ, USA, 2008. [Google Scholar]
- Avin, O.; Raveh, D.E.; Drachinsky, A.; Ben-Shmuel, Y. An experimental benchmark of a very flexible wing. In Proceedings of the AIAA Scitech 2021 Forum, Reston, VA, USA, 11–21 January 2021. [Google Scholar]
- Goizueta, N.; Drachinsky, A.; Wynn, A.; Raveh, D.E.; Palacios, R. Flutter predictions for very flexible wing wind tunnel test. In Proceedings of the AIAA Scitech 2021 Forum, Reston, VA, USA, 11–21 January 2021. [Google Scholar]
- del Carre, A.; Muñoz-Simón, A.; Goizueta, N.; Palacios, R. SHARPy: A dynamic aeroelastic simulation toolbox for very flexible aircraft and wind turbines. J. Open Source Softw. 2019, 4, 1885. [Google Scholar] [CrossRef] [Green Version]
- Norton, W.J. Structures Flight Test Handbook; Air Force Flight Test Center: Edwards Air Force Base, CA, USA, 1990. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Measurement |
|---|---|
| Span | 550 mm |
| Chord | 100 mm |
| Area | 0.055 m2 |
| Main spar | 550 × 60 × 2.5 mm |
| Aspect ratio | 5.5 |
| Airfoil | NACA 0018 |
| Mass | 0.321 kg |
| Angle of attack | 1–10° |
| Free stream velocity | 30, 40, 50 m/s |
| Density | 1.225 kg/m3 |
| Chordwise panels | 16 |
| Spanwise panels | 32 |
| Wake length | 2000 m |
| Gravity | on (z direction) |
| AoA | Velocity | Tip Displacement Experiment (Skin) | Tip Displacement Simulation (No Skin) | |
|---|---|---|---|---|
| 5° | 30 m/s | 52 mm | 60 mm | 15.3% |
| 5° | 50 m/s | 157 mm | 182 mm | 15.9% |
| 7° | 55 m/s | 255 mm | 267 mm | 4.7% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hilger, J.; Ritter, M.R. Nonlinear Aeroelastic Simulations and Stability Analysis of the Pazy Wing Aeroelastic Benchmark. Aerospace 2021, 8, 308. https://doi.org/10.3390/aerospace8100308
Hilger J, Ritter MR. Nonlinear Aeroelastic Simulations and Stability Analysis of the Pazy Wing Aeroelastic Benchmark. Aerospace. 2021; 8(10):308. https://doi.org/10.3390/aerospace8100308
Chicago/Turabian StyleHilger, Jonathan, and Markus Raimund Ritter. 2021. "Nonlinear Aeroelastic Simulations and Stability Analysis of the Pazy Wing Aeroelastic Benchmark" Aerospace 8, no. 10: 308. https://doi.org/10.3390/aerospace8100308
APA StyleHilger, J., & Ritter, M. R. (2021). Nonlinear Aeroelastic Simulations and Stability Analysis of the Pazy Wing Aeroelastic Benchmark. Aerospace, 8(10), 308. https://doi.org/10.3390/aerospace8100308