Trajectory Optimization and Analytic Solutions for High-Speed Dynamic Soaring


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Trajectory Optimization
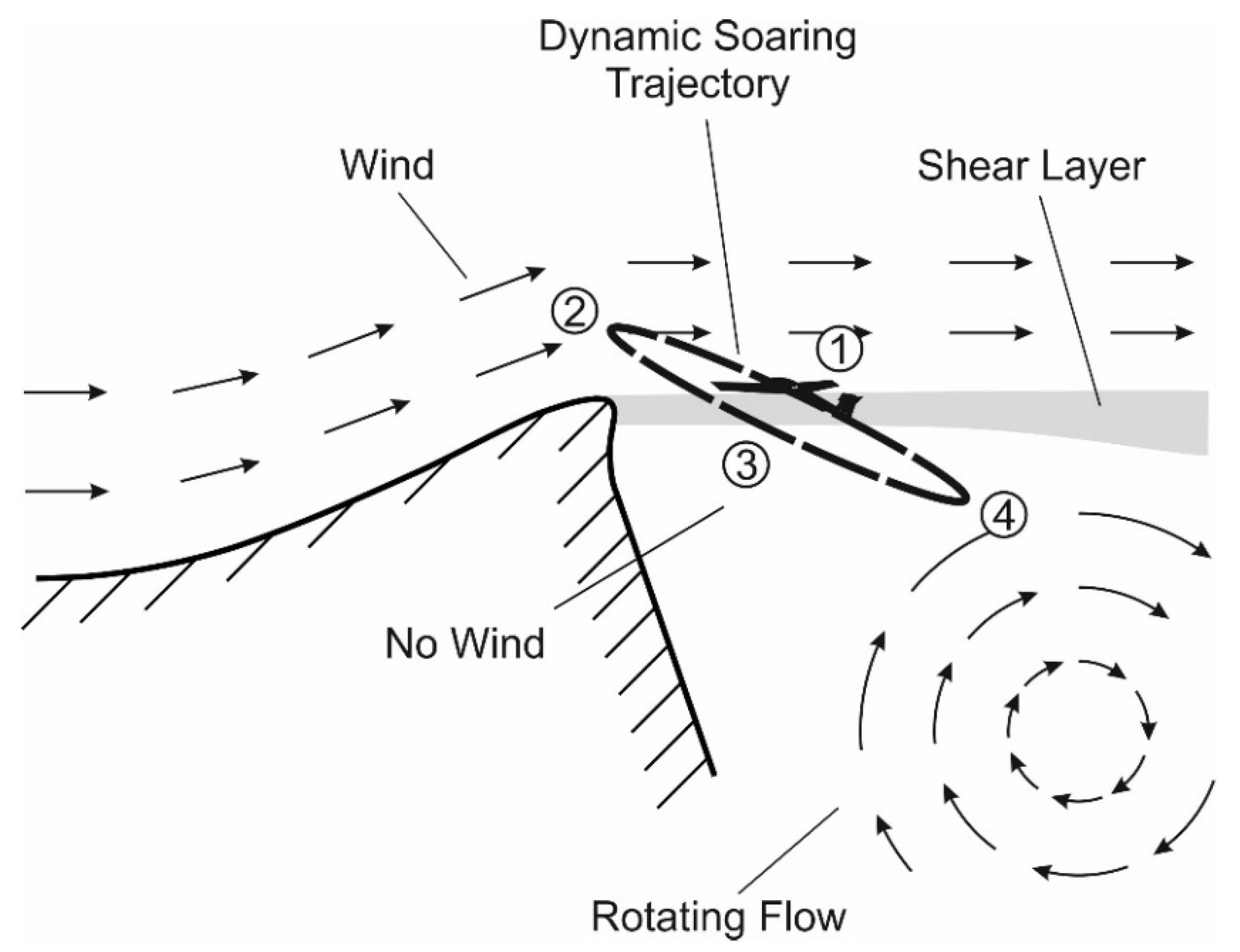
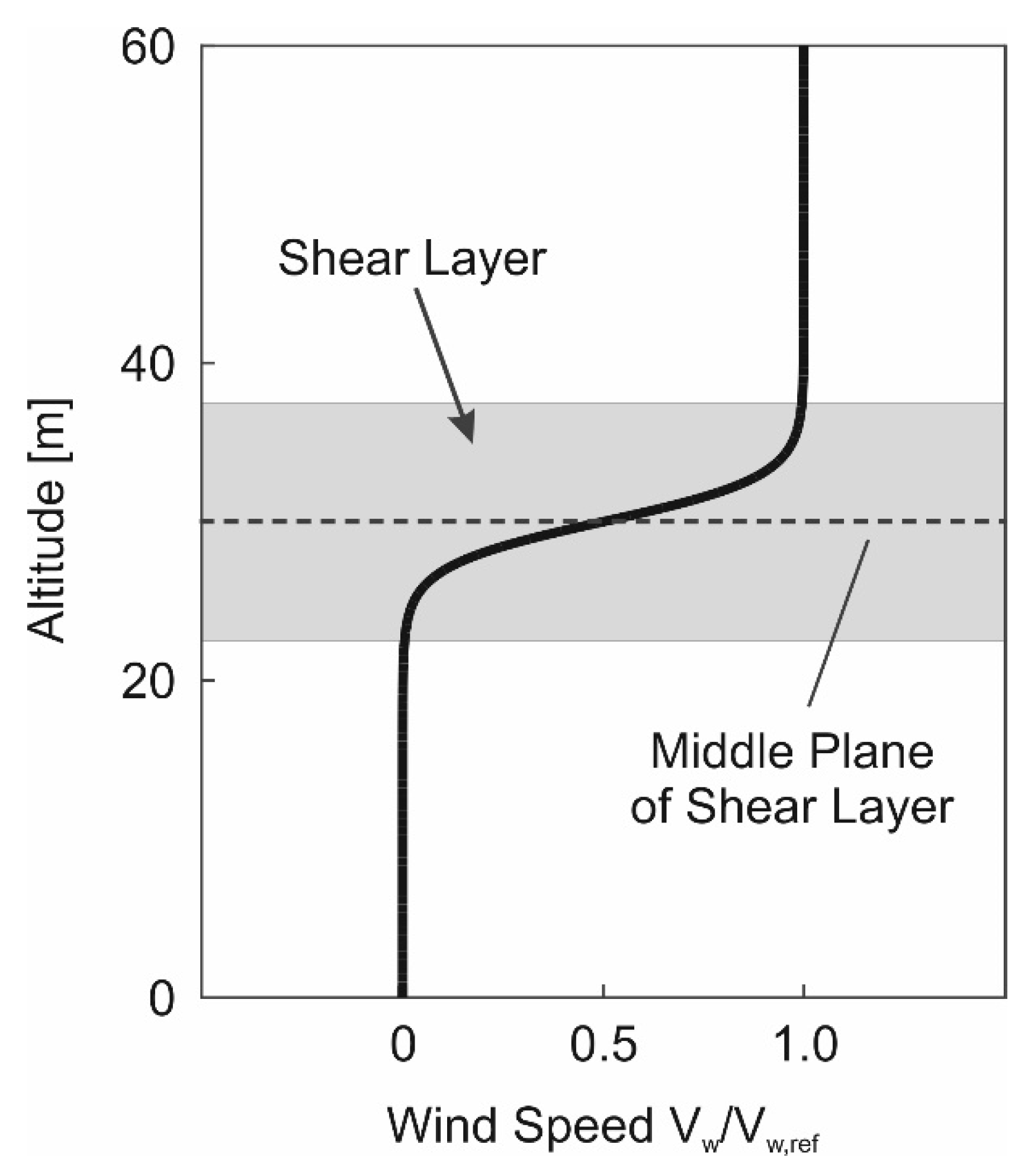
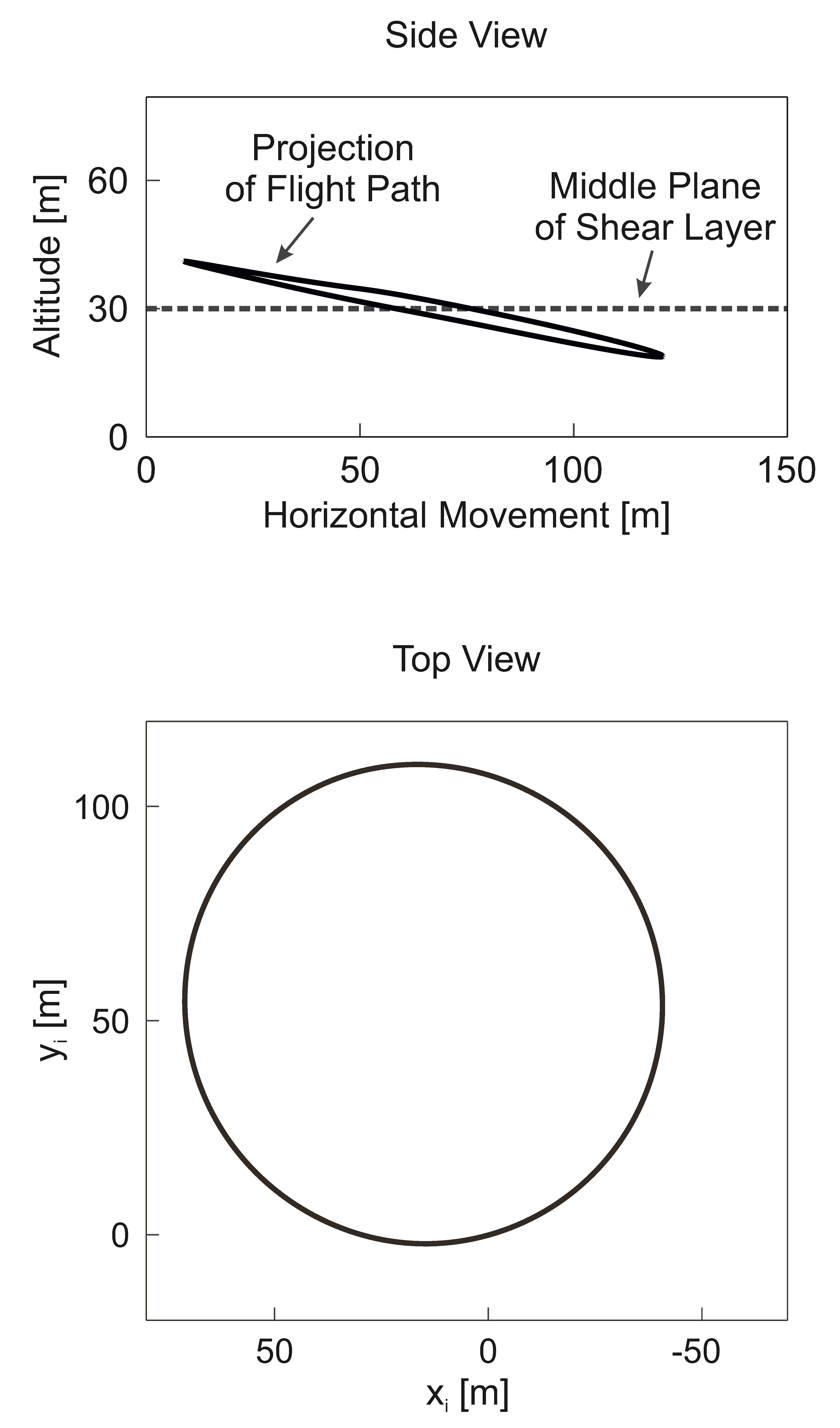
2.1. Modellings of Shear Wind and Vehicle Dynamics
- (1)
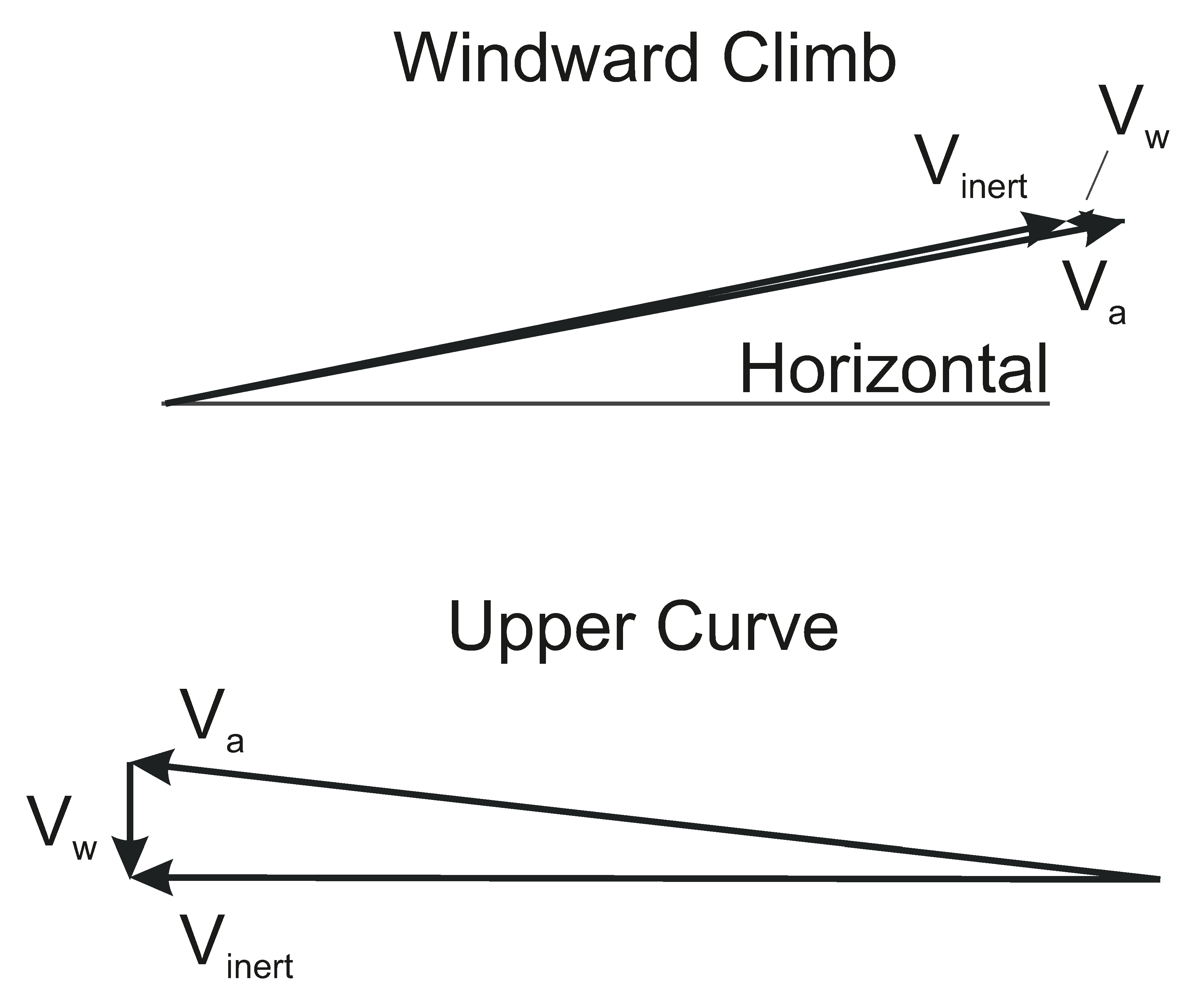
- Windward climb;
- (2)
- Upper curve in region of high wind speed;
- (3)
- Leeward descent;
- (4)
- Lower curve in region of zero or low wind speed.
2.2. Formulation of Optimal Control Problem
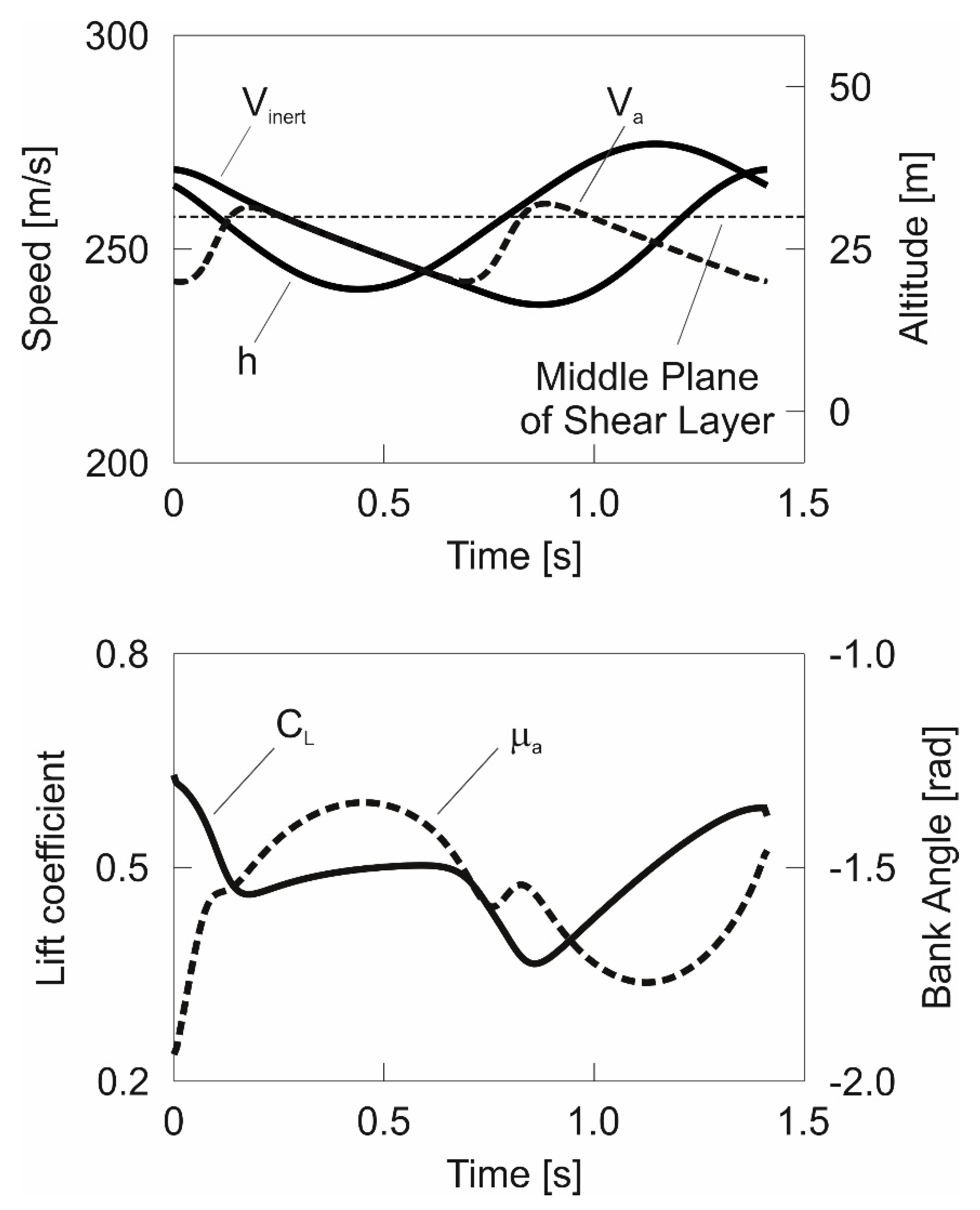
2.3. Results on Trajectory Optimization
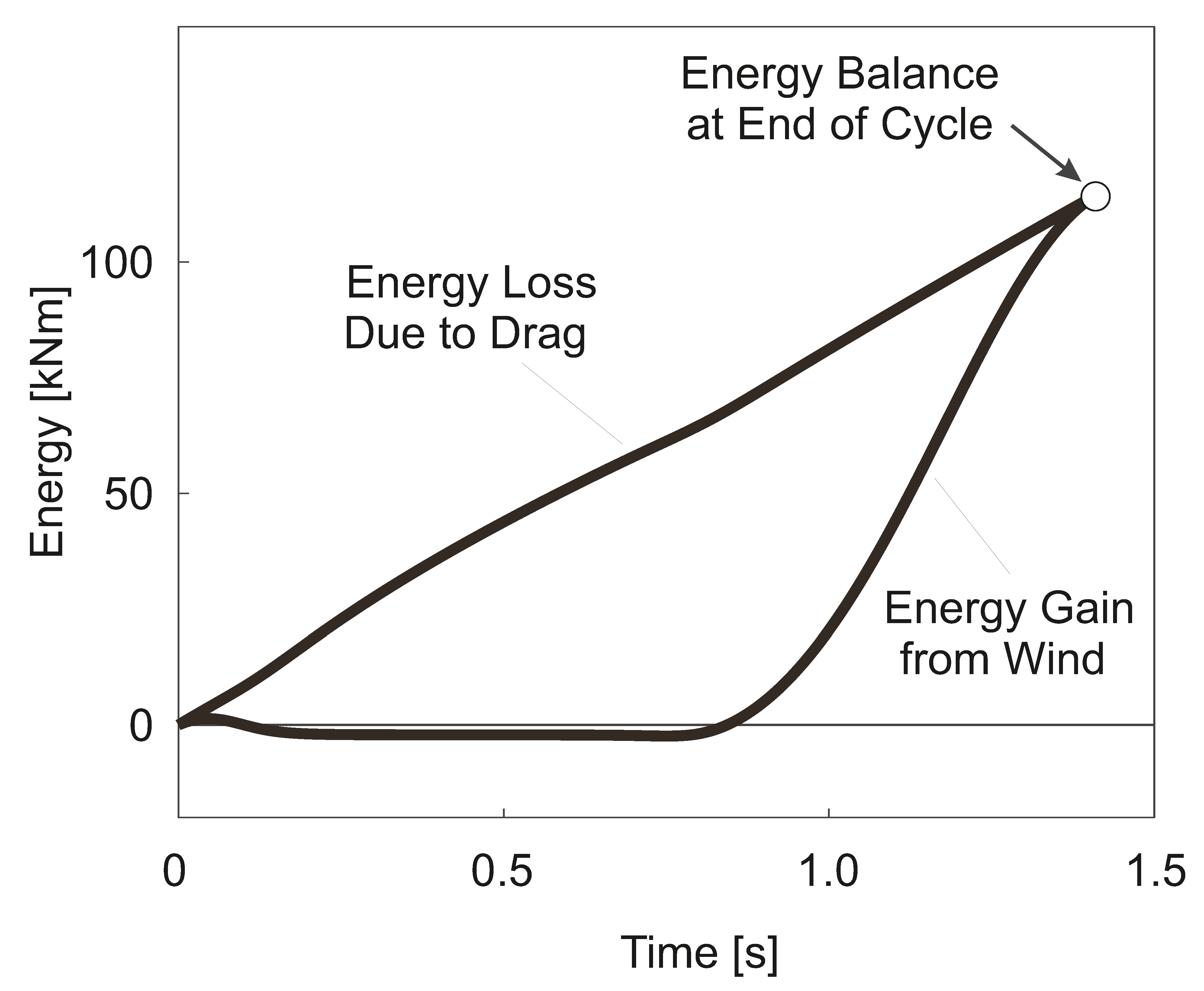
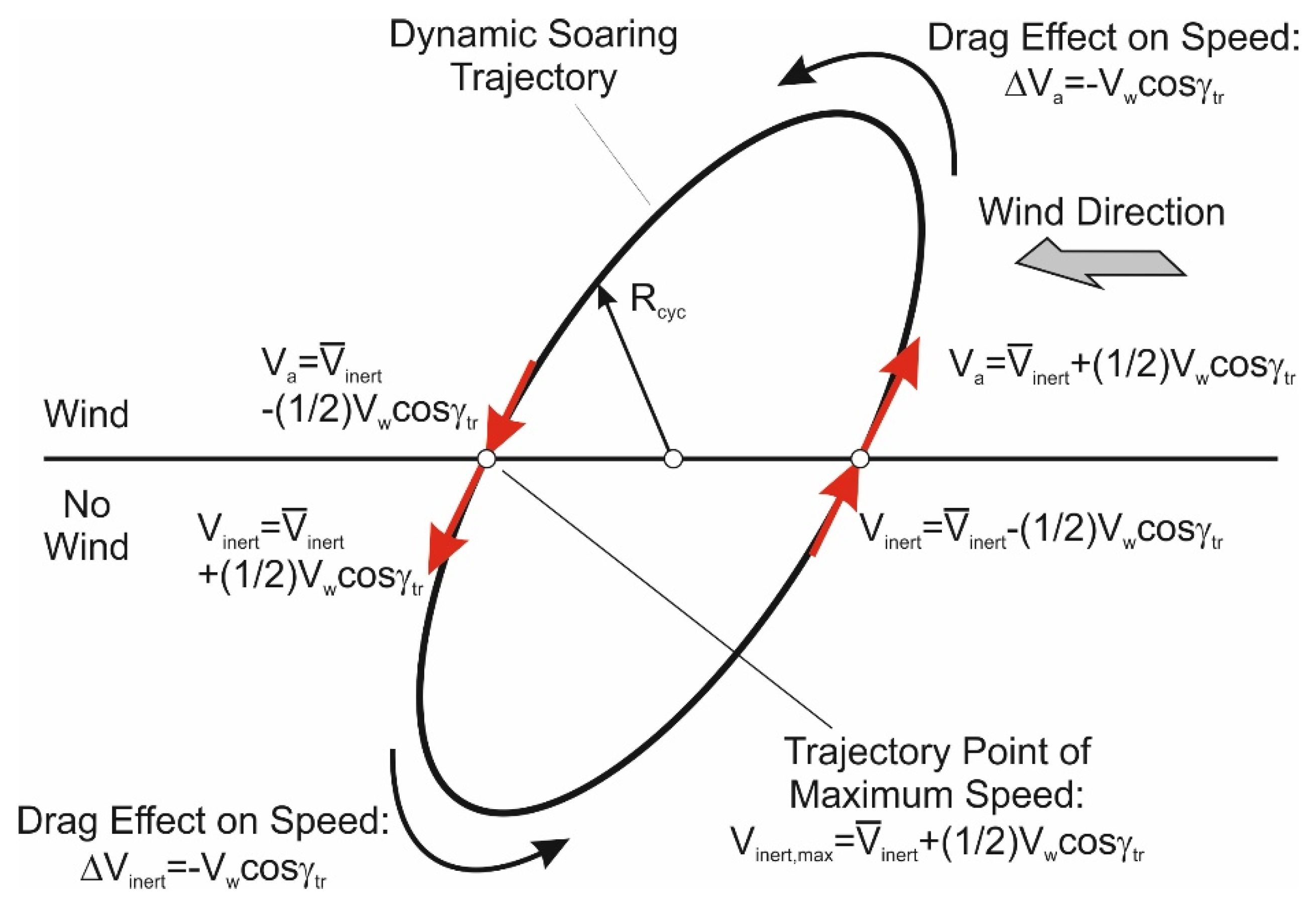
3. Energy Based Model of High-Speed Dynamic Soaring
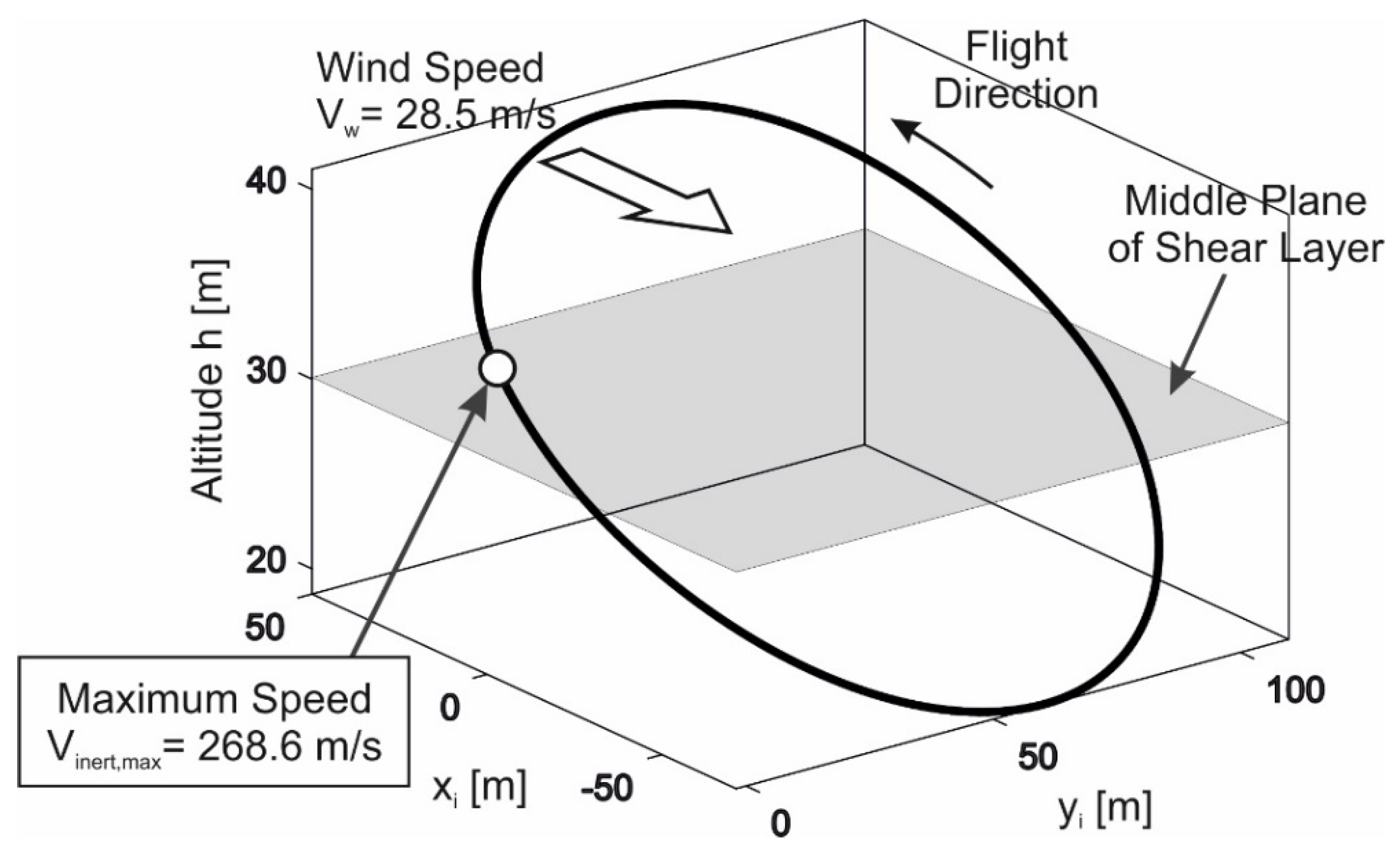
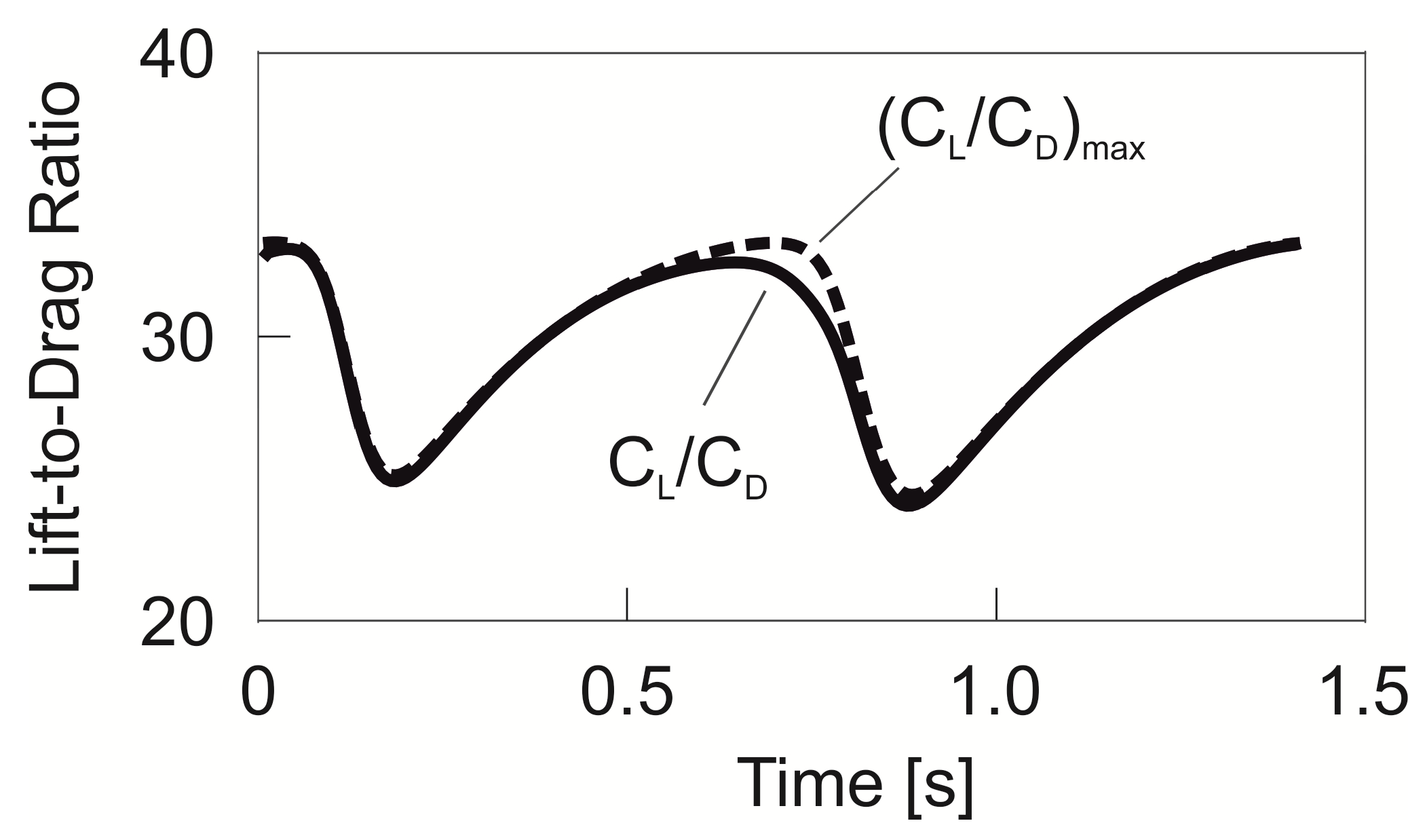
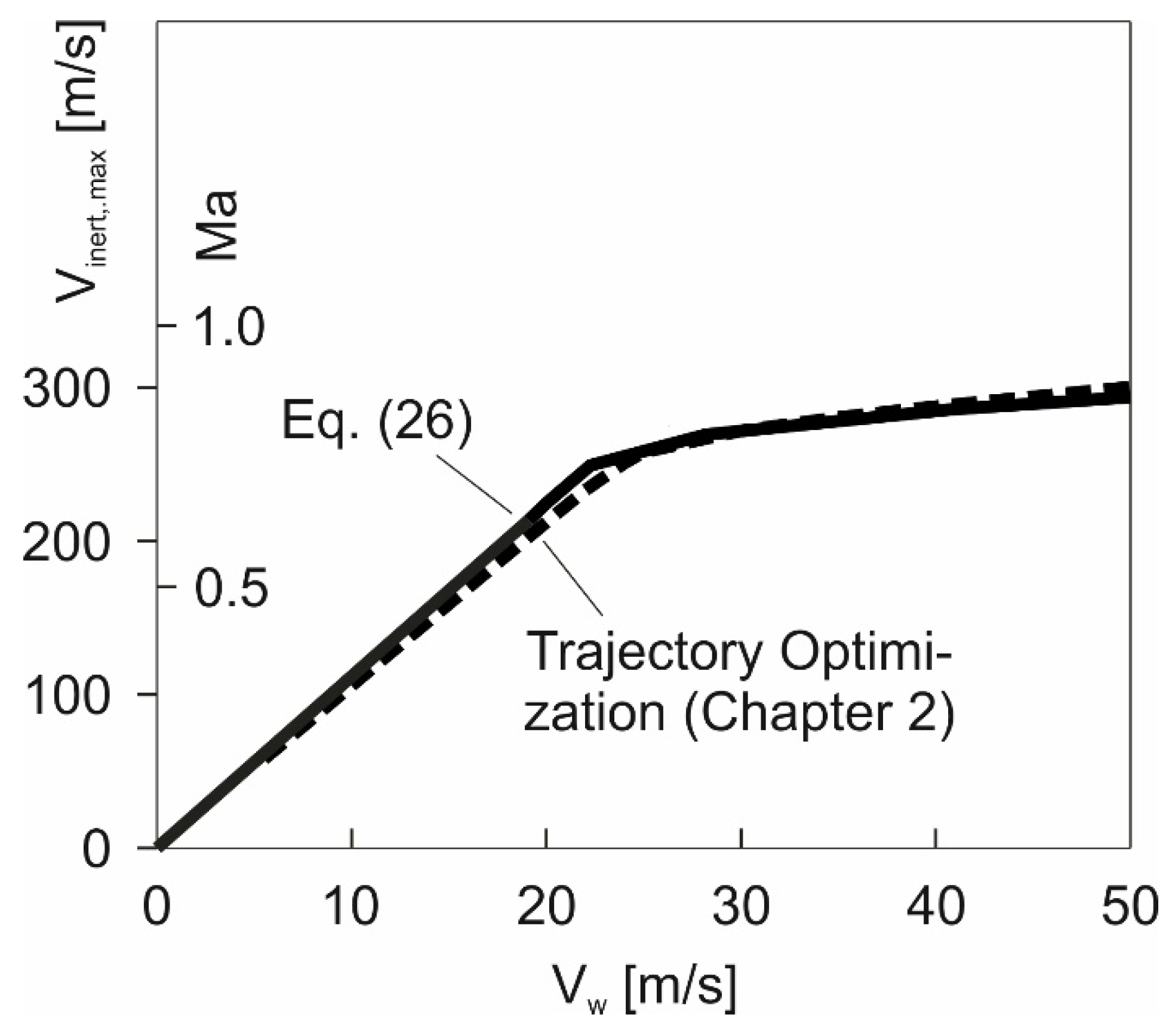
4. Maximum Speed Performance
- (1)
- Wind speed, ;
- (2)
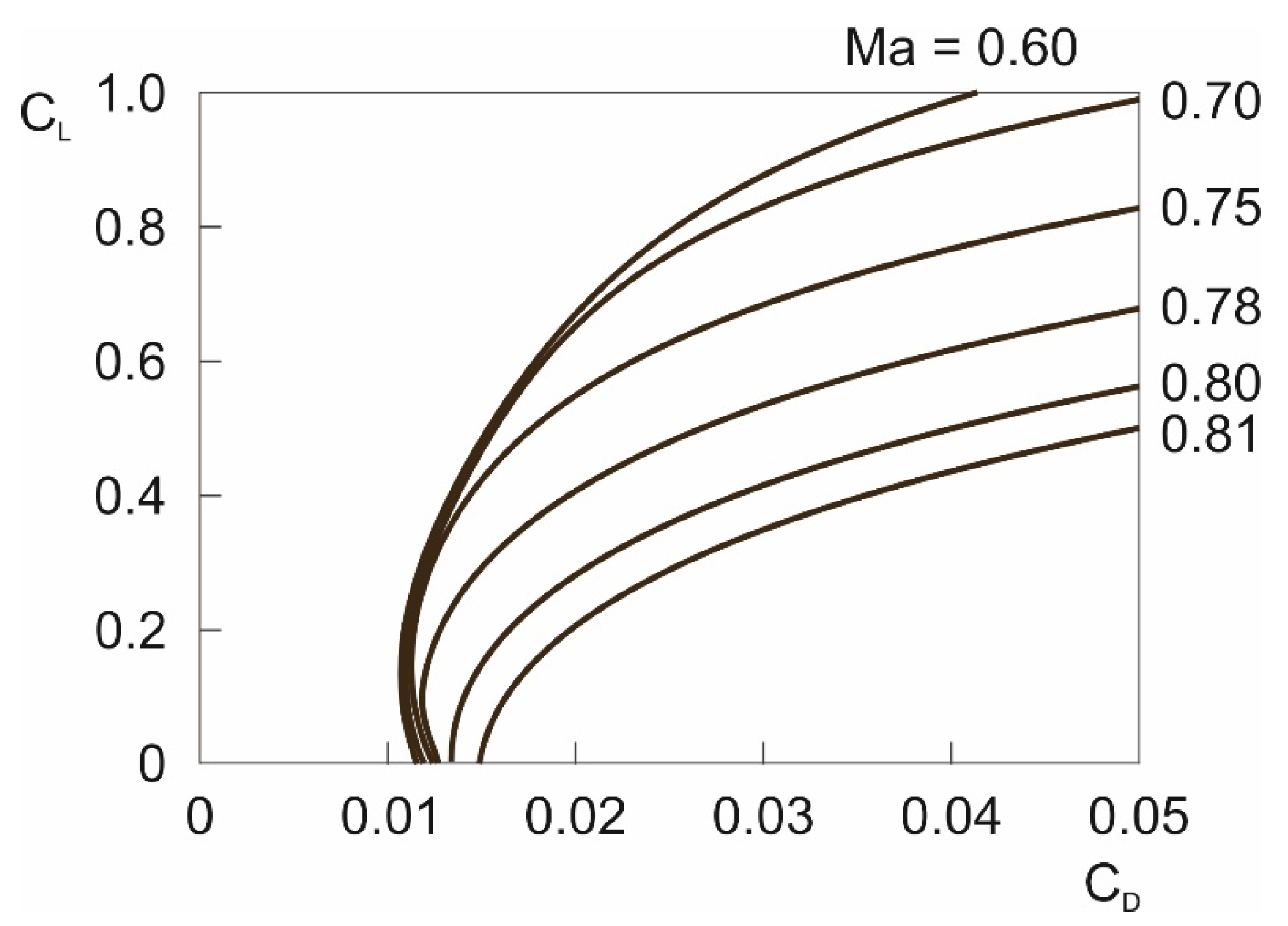
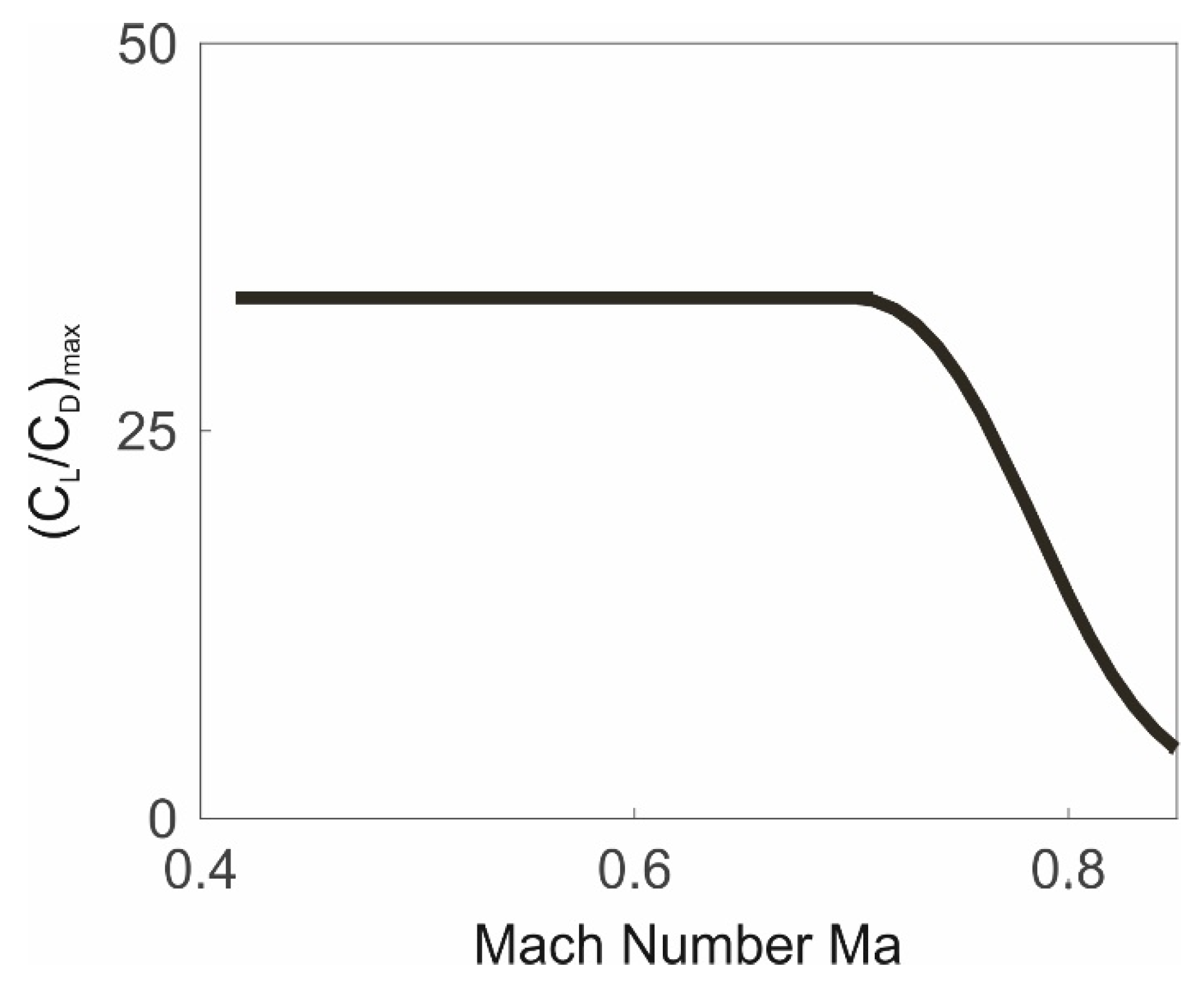
- Maximum lift-to-drag ratio in terms of .
5. Further Issues Concerning High-Speed Dynamic Soaring
- -
- cycle time
- -
- load factor
- -
- trajectory extension and loop radius
- -
- altitude
5.1. Cycle Time
5.2. Load Factor
5.3. Trajectory Extensions and Loop Radius
5.4. Effects of Altitude
5.5. Final Remark on Validity of Energy Based Model and Related Analytical Solutions
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| a | speed of sound |
| aij | coefficients |
| CD | drag coefficient |
| CL | lift coefficient |
| lift coefficient associated with maximum lift-to-drag ratio | |
| D | drag |
| E | energy |
| g | acceleration due to gravity |
| h | altitude |
| J | performance criterion |
| L | lift |
| Ma | Mach number |
| m | mass |
| n | load factor |
| Rcyc | loop radius |
| S | wing reference area |
| t | time |
| u, v, wi | speed components |
| u | control vector |
| Va | airspeed |
| Vinert | inertial speed |
| Vw | wind speed |
| Vw,ref | reference wind speed |
| x | longitudinal coordinate |
| x | state vector |
| W | work |
| y | lateral coordinate |
| A | aspect ratio |
| χ | azimuth angle |
| γ | flight path angle |
| μ | bank angle |
| ρ | air density |
References
- Idrac, P. Experimentelle Untersuchungen über den Segelflug Mitten im Fluggebiet Großer Segelnder Vögel (Geier, Albatros usw.)—Ihre Anwendung auf den Segelflug des Menschen; Verlag von R. Oldenbourg: München/Berlin, Germany, 1932. [Google Scholar]
- Cone, C.D., Jr. A Mathematical Analysis of the Dynamic Soaring Flight of the Albatross with Ecological Interpretations; Special Scientific Report No. 50; Virginia Institute of Marine Science: Gloucester Point, VA, USA, 1964. [Google Scholar]
- Sachs, G. Minimum shear wind strength required for dynamic soaring of albatrosses. IBIS Int. J. Avian Sci. 2005, 147, 1–10. [Google Scholar] [CrossRef]
- Sachs, G.; Traugott, J.; Nesterova, A.P.; Bonadonna, F. Experimental verification of dynamic soaring in albatrosses. J. Exp. Boil. 2013, 216, 4222–4232. [Google Scholar] [CrossRef] [PubMed]
- Richardson, P.L. High-Speed Dynamic Soaring. R/C Soar. Dig. 2012, 29, 36–49. [Google Scholar]
- Lisenby, S. Dynamic Soaring. In Proceedings of the Big Techday 10 Conference, München, Germany, 2 June 2017; TNG Technology Consulting GmbH: Unterföhring, Germany, 2017. [Google Scholar]
- Wurts, J. Dynamic Soaring. S&E Modeler Magazine, August/September 1998; Volume 5, 2–3. [Google Scholar]
- B2. In the Air. R/C Soaring Digest, 3 November 2018; Volume 7, 3.
- Sukumar, P.P.; Michael, S.; Selig, M.S. Dynamic Soaring of Sailplanes over Open Fields. J. Aircraft 2013, 50, 1430. [Google Scholar] [CrossRef]
- Deittert, M.; Richards, A.; Toomer, C.A.; Pipe, A. Engineless Unmanned Aerial Vehicle Propulsion by Dynamic Soaring. J. Guid. Control Dyn. 2009, 32, 1446–1457. [Google Scholar] [CrossRef]
- Langelaan, J.W.; Roy, N. Enabling New Missions for Small Robotic Aircraft. Science 2009, 326, 1642–1644. [Google Scholar] [CrossRef] [PubMed]
- Lawrance, N.R.J.; Acevedo, J.J.; Chung, J.J.; Nguyen, J.L.; Wilson, D.; Sukkarieh, S. Long Endurance Autonomous Flight for Unmanned Aerial Vehicles; Aerospace Lab: Palaiseau, France, 2014; pp. 1–15. [Google Scholar]
- NASA. 2010. Available online: http://www.max3dmodels.com/vdo/NASA-Albatross-Dynamic-Soaring-Open-Ocean-Persistent-Platform-UAV-Concept/F4zEaYl01Uw.html (accessed on 8 April 2020).
- Bonnin, V.; Toomer, C.; Moschetta, J.-M.; Benard, E. Energy Harvesting Mechanisms for UAV Flight by Dynamic Soaring. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference 2013, Boston, MA, USA, 19–22 August 2013; pp. 761–774. [Google Scholar]
- Bird, J.J.; Langelaan, J.W.; Montella, C.; Spletzer, J.; Grenestedt, J. Closing the Loop in Dynamic Soaring. In Proceedings of the AIAA Guidance, Navigation and Control Conference, National Harbor, MD, USA, 13–17 January 2014; pp. 1–19. [Google Scholar]
- Sachs, G.; Grüter, B. Dynamic Soaring at 600 mph. In Proceedings of the AIAA SciTech Forum, San Diego, CA, USA, 7–11 January 2019; AIAA Paper 2019-0107. pp. 1–13. [Google Scholar]
- Richardson, P.L. High-Speed Robotic Albatross: Unmanned Aerial Vehicle powered by dynamic soaring. R/C Soaring Digest, 20 April 2012; 29, 4–18. [Google Scholar]
- DSKinetic. Available online: http://www.dskinetic.com (accessed on 8 April 2020).
- Rieck, M.; Bittner, M.; Grüter, B.; Diepolder, J. FALCON.m—User Guide, Institute of Flight System Dynamics; Technische Universität München: Munich, Germany, 2016. [Google Scholar]
- Wachter, A.; Biegler, L.T. On the implementation of an interior-point filter line-search algorithm for large-scale nonlinear programming. Math. Program. 2005, 106, 25–57. [Google Scholar] [CrossRef]
- Sachs, G. Kinetic Energy in Dynamic Soaring—Inertial Speed and Airspeed. J. Guid. Control Dyn. 2019, 42, 1812–1821. [Google Scholar] [CrossRef]
- International Organization for Standardization. Standard Atmosphere; ISO: Geneva, Switzerland, 1975; p. 2533. [Google Scholar]




















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sachs, G.; Grüter, B. Trajectory Optimization and Analytic Solutions for High-Speed Dynamic Soaring. Aerospace 2020, 7, 47. https://doi.org/10.3390/aerospace7040047
Sachs G, Grüter B. Trajectory Optimization and Analytic Solutions for High-Speed Dynamic Soaring. Aerospace. 2020; 7(4):47. https://doi.org/10.3390/aerospace7040047
Chicago/Turabian StyleSachs, Gottfried, and Benedikt Grüter. 2020. "Trajectory Optimization and Analytic Solutions for High-Speed Dynamic Soaring" Aerospace 7, no. 4: 47. https://doi.org/10.3390/aerospace7040047
APA StyleSachs, G., & Grüter, B. (2020). Trajectory Optimization and Analytic Solutions for High-Speed Dynamic Soaring. Aerospace, 7(4), 47. https://doi.org/10.3390/aerospace7040047