Hybrid Rocket Underwater Propulsion: A Preliminary Assessment


Abstract
1. Introduction
2. Underwater Setup
2.1. Underwater Experimental System
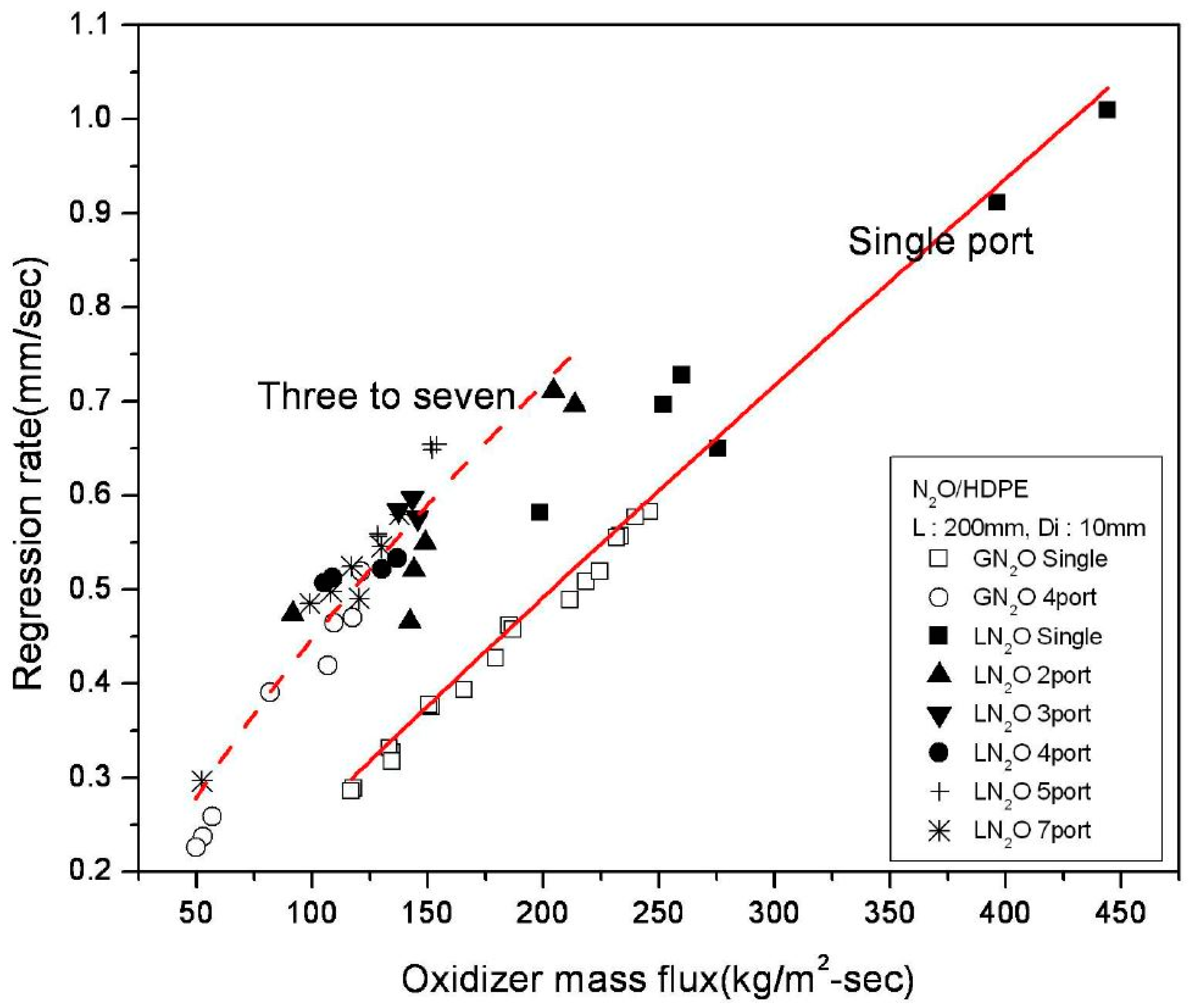
2.2. Internal Ballistics
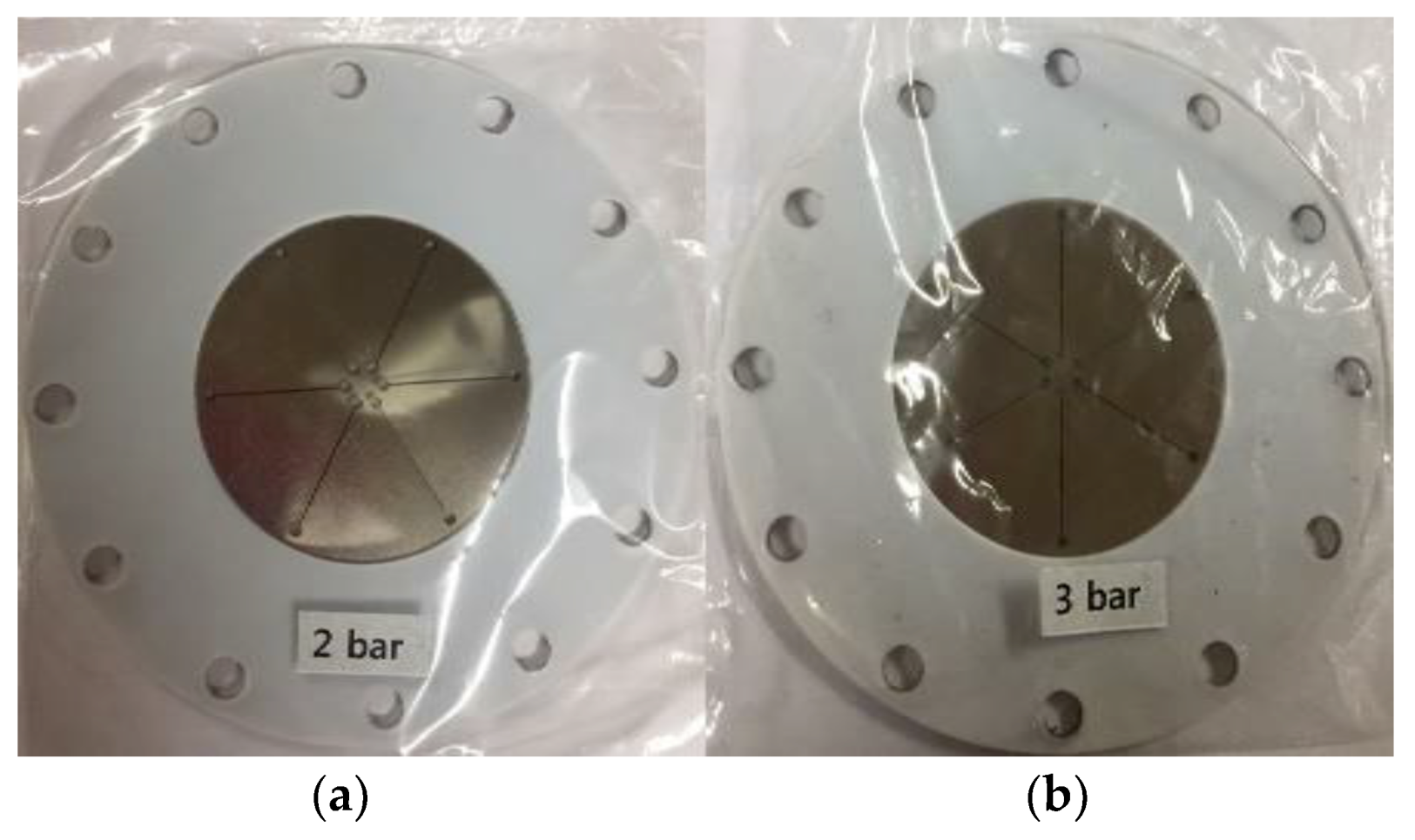
2.3. Underwater Subsystem (Ignition, Flow Control, Thrust Measurement)
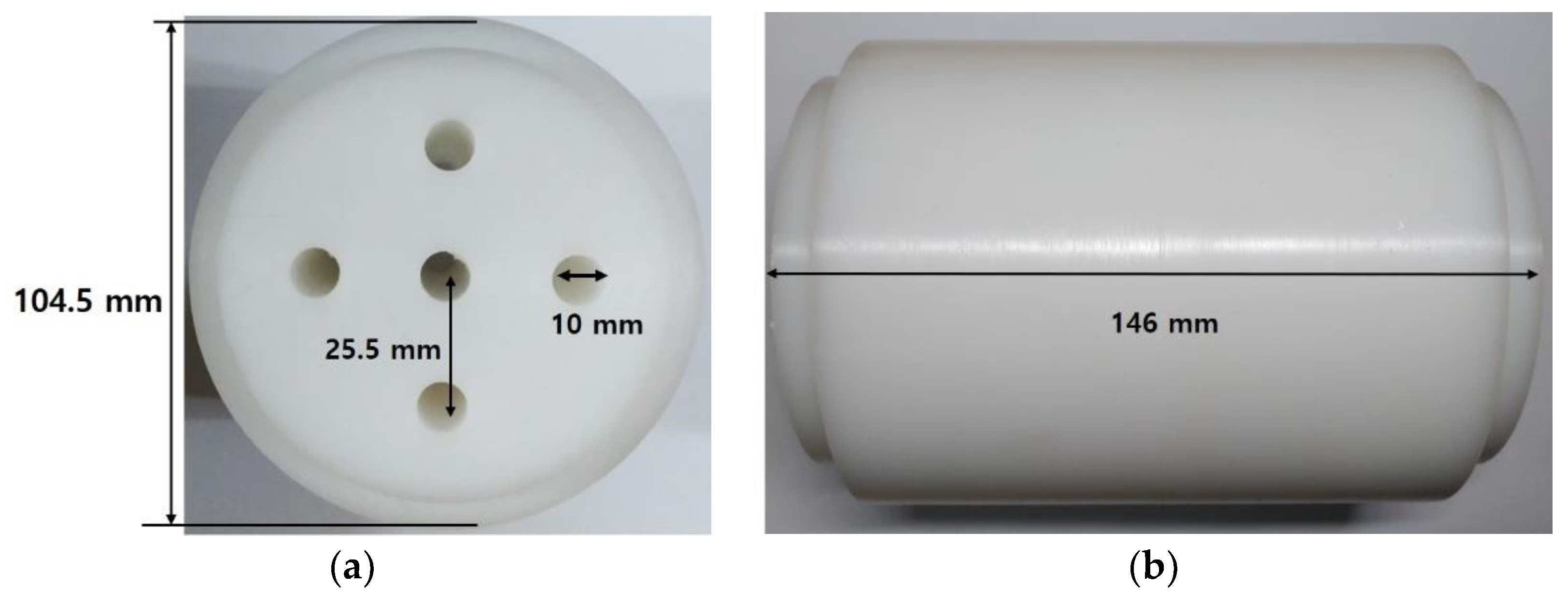
2.4. Water Filled Tank Containing the Motor
2.5. Signal Command and Sequence
3. Results and Discussion
3.1. Ground Tests versus Underwater Tests
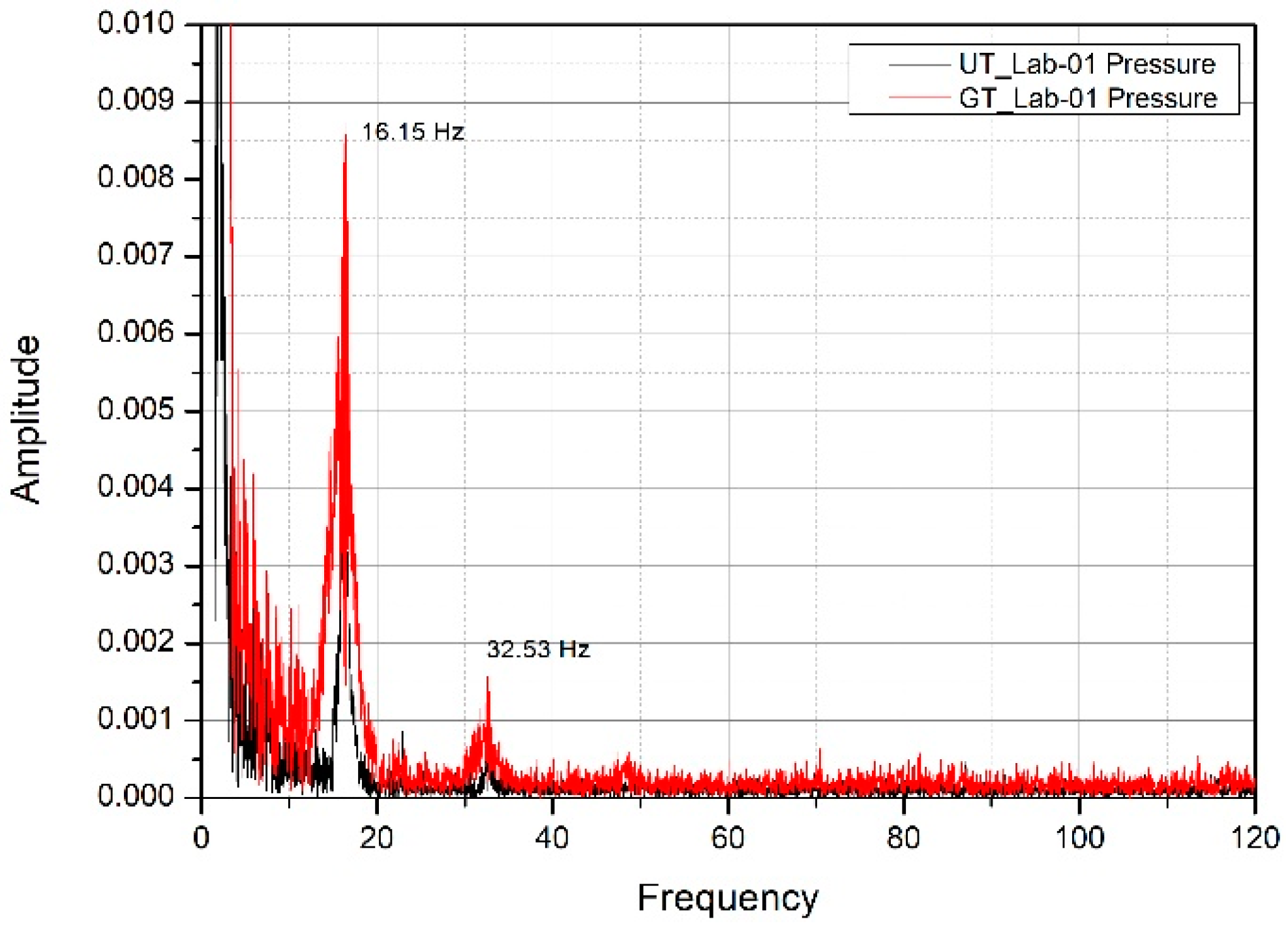
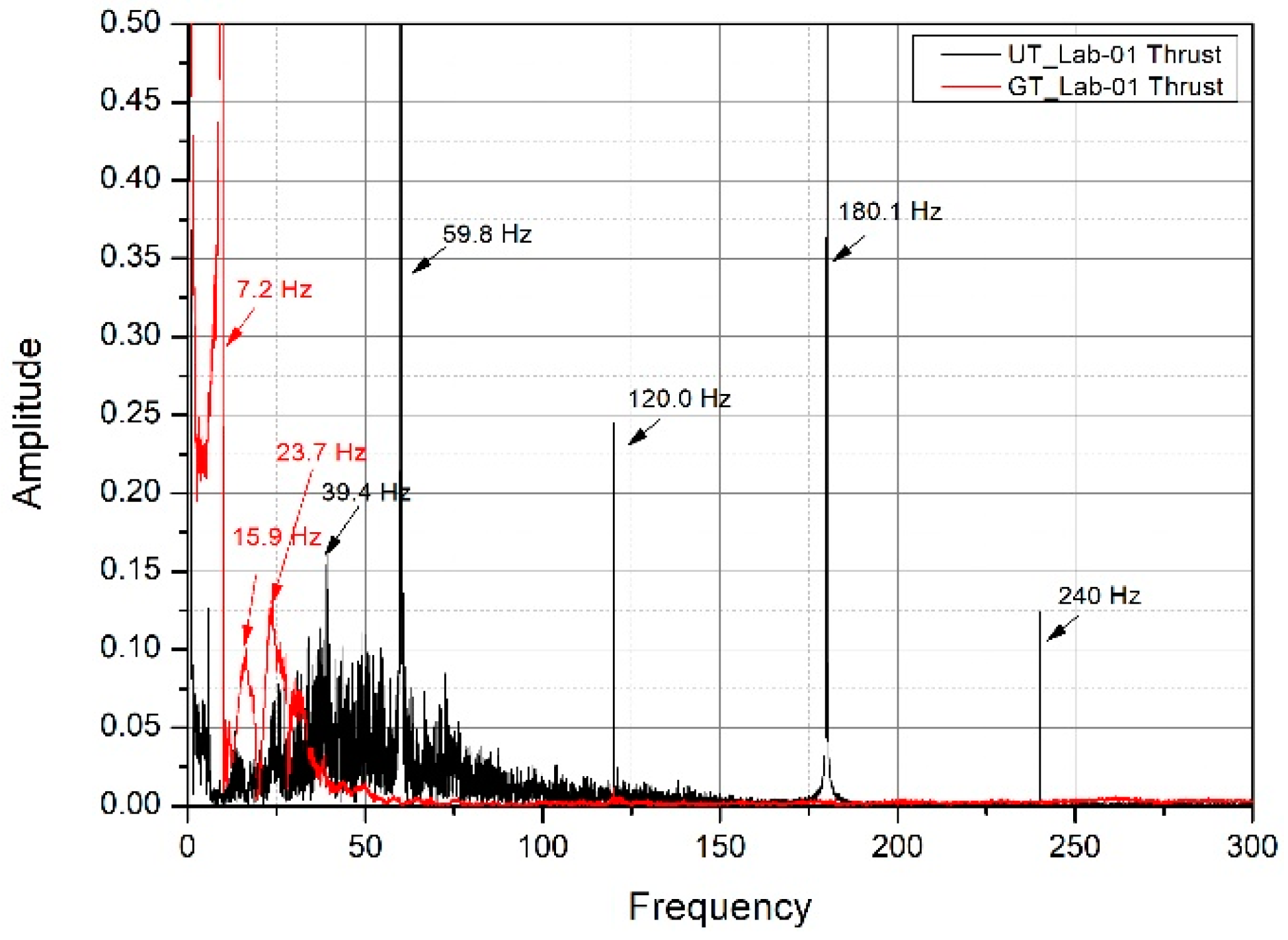
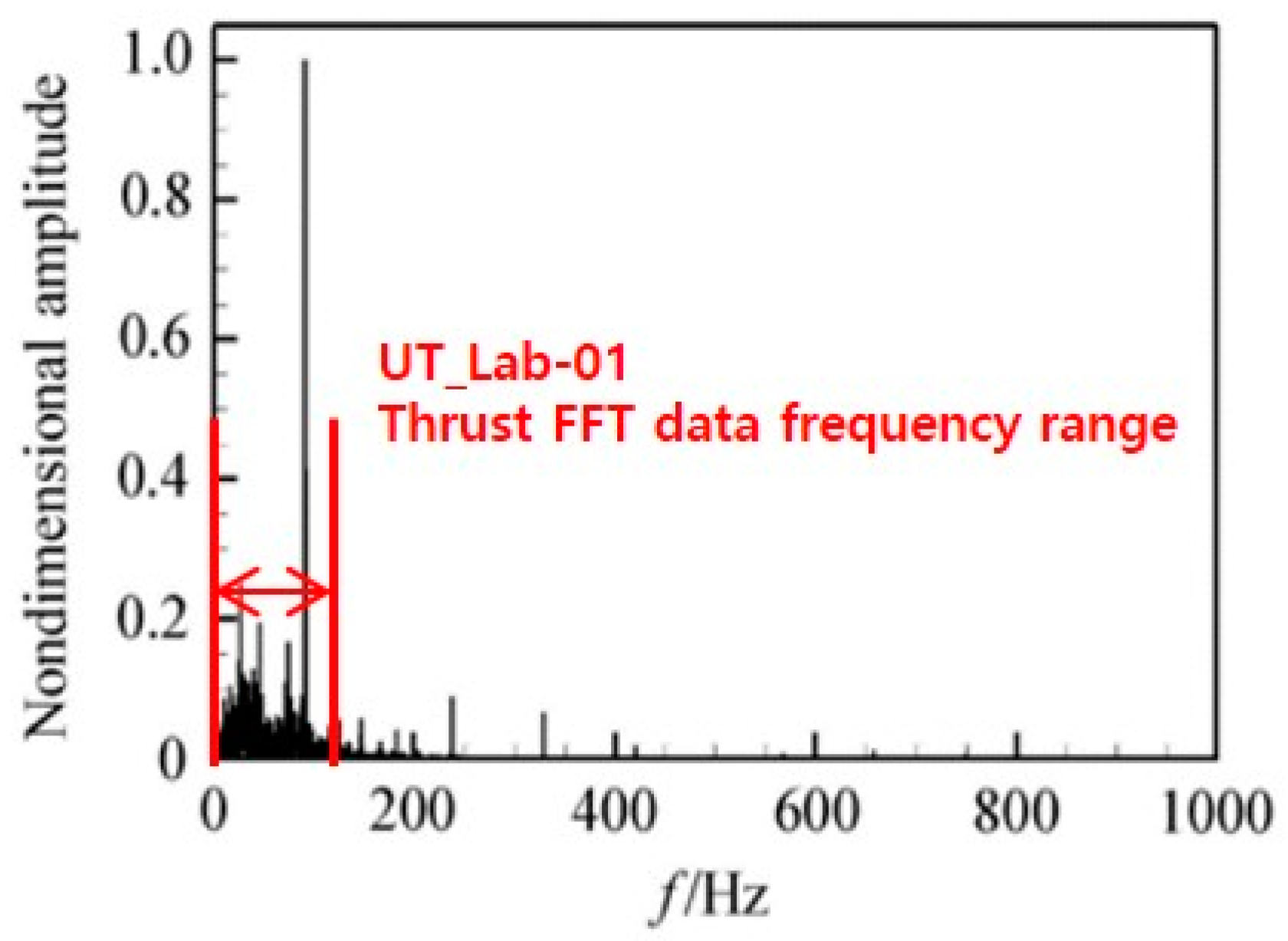
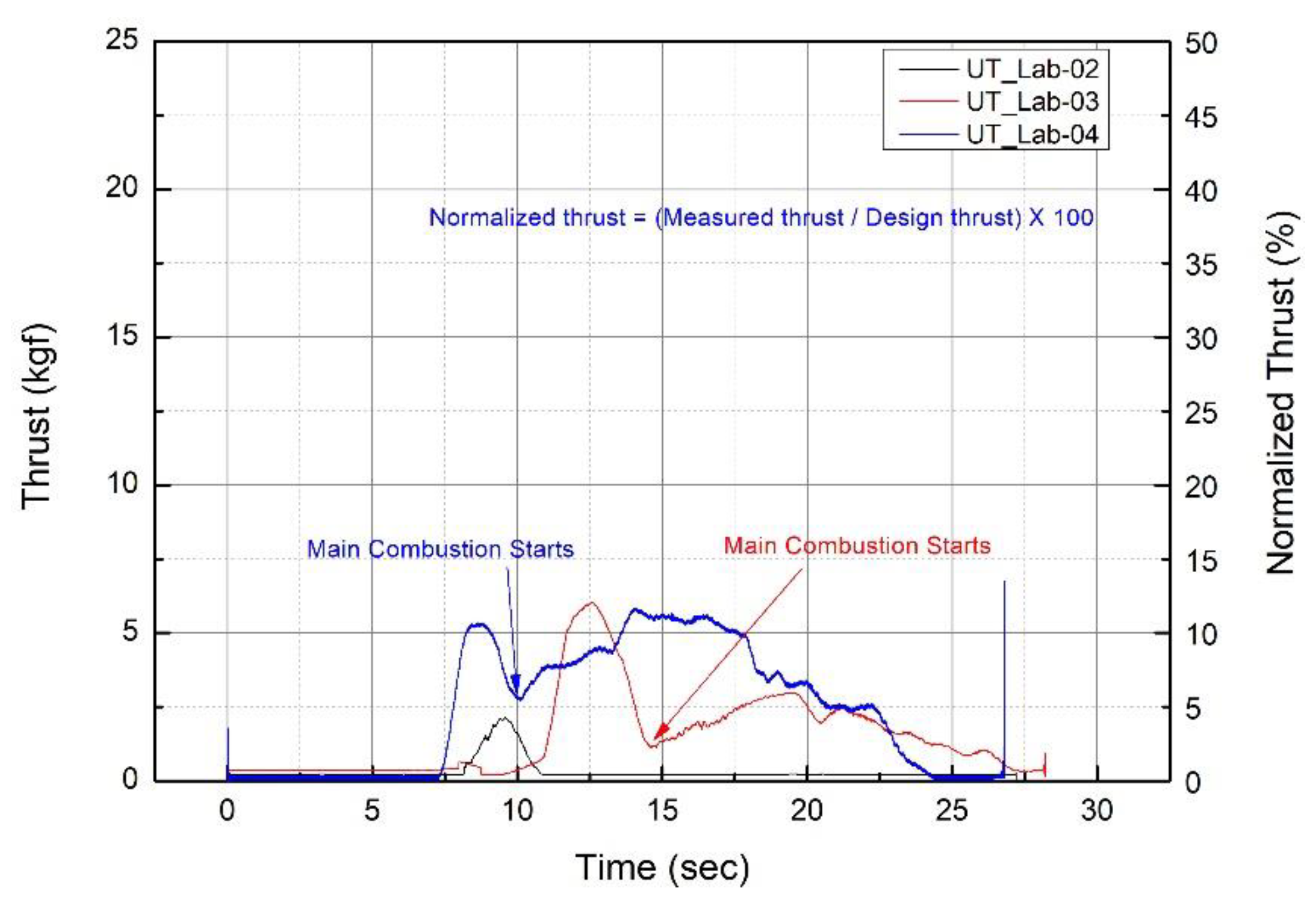
3.2. Thrust Oscillation in Underwater Environment
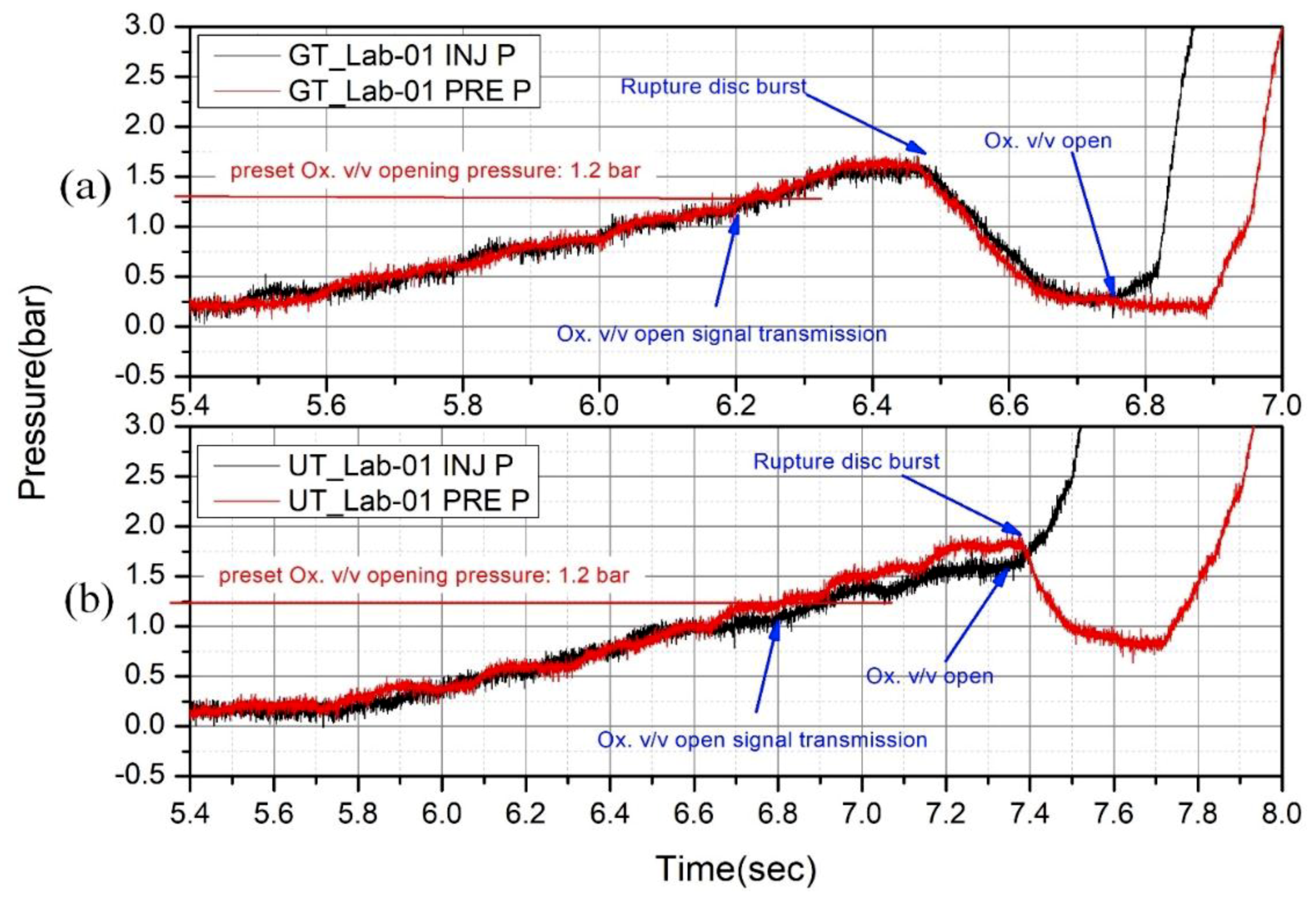
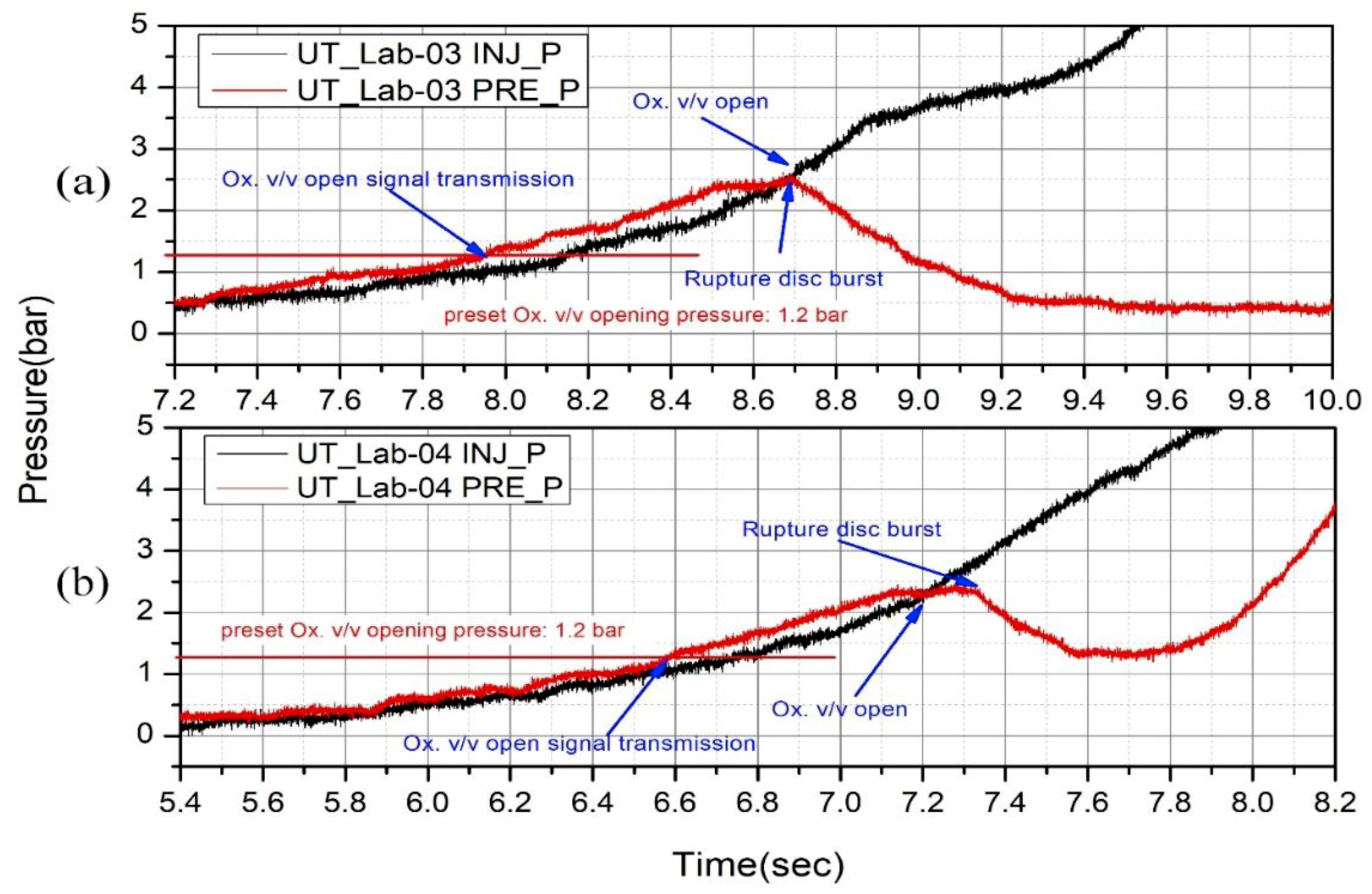
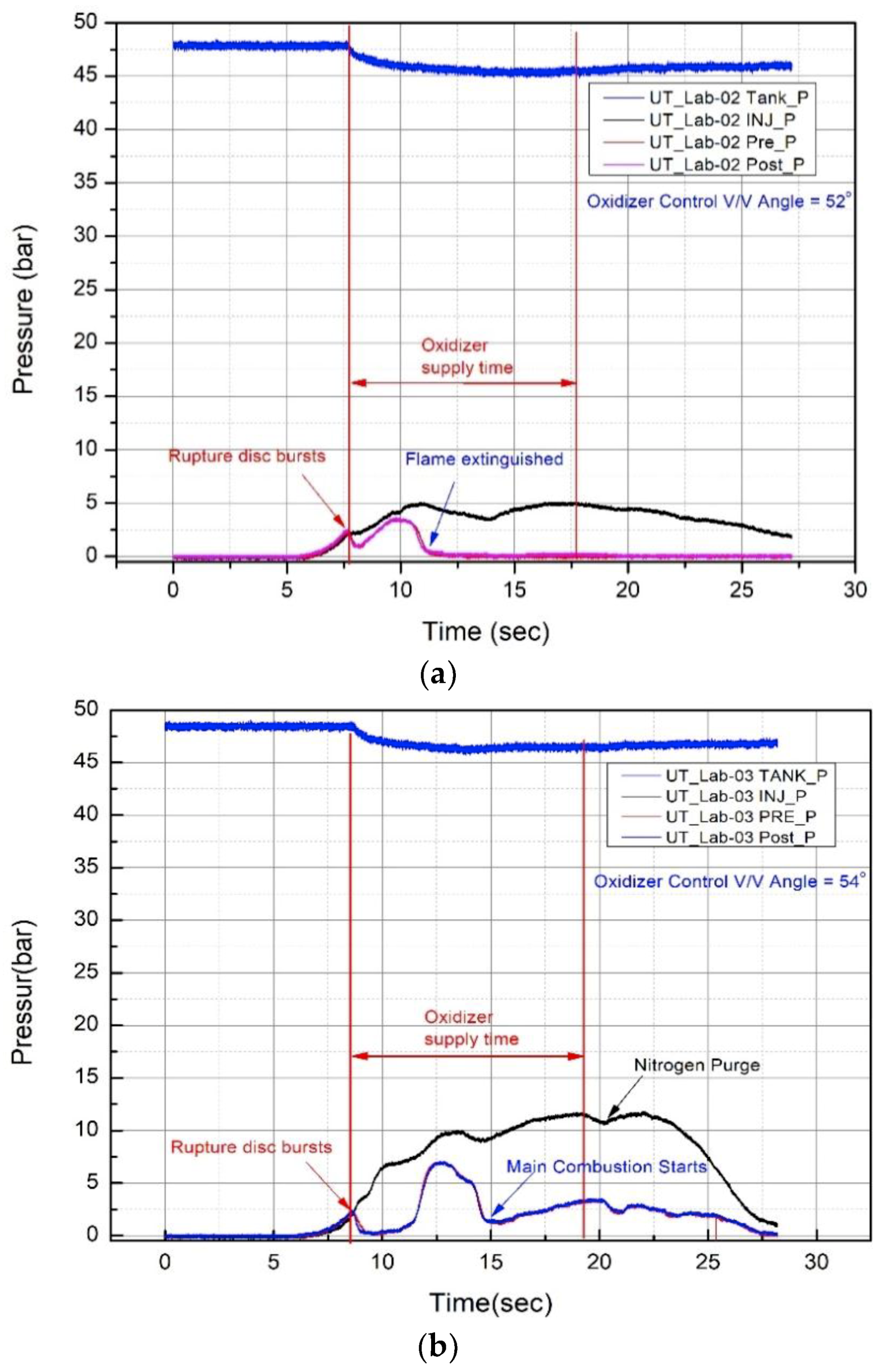
3.3. Ignition Characteristics
3.4. Motor Idling Condition in Underwater Environment
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Initial cross-section area | (m2) | |
| Final cross-section area | (m2) | |
| Averaged oxidizer mass flux | (kg·m–2·s–1) | |
| Fuel grain length | (m) | |
| Fuel mass difference | (kg) | |
| Averaged oxidizer mass flow rate | (kg·s–1) | |
| Port number | (-) | |
| Overall regression rate | (m·s–1) | |
| Initial port radius | (m) | |
| Final port radius | (m) | |
| Burning time | (s) | |
| Fuel density | (kg·m–3) |
References
- Tang, J.N.; Wang, N.F.; Shyy, W. Flow structures of gaseous jets injected into water for underwater propulsion. Acta Mech. Sin. 2011, 27, 461–472. [Google Scholar] [CrossRef]
- Tang, J.; Tseng, C.C.; Wang, N.; Shyy, W. Flow structures of gaseous gets injected into water for underwater propulsion. In Proceedings of the 49th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2011. [Google Scholar]
- Burke, A.E. Torpedoes and Their Impact on Naval Warfare; 0704-0188; Naval Undersea Warfare Center Division: Newport, RI, USA, 2017. [Google Scholar]
- Kirby, G. A history of the torpedo. J. R. Nav. Sci. Serv. 1972, 27, 30–105. [Google Scholar]
- Kirby, G. The Development of Rocket-Propelled Torpedoes. Available online: http://www.geoffkirby.co.uk/rocket-torpedoes.pdf (accessed on 26 January 2019).
- Garanin, I. The hydro-reacting marine solid fuel rocket engine. In Thermal to Mechanical Energy Conversion: Engines and Requirements-Volume II; United Nations Educational Scientific and Cultural Organization: Paris, France, 2009; Volume 8, pp. 201–240. [Google Scholar]
- Ng, K. Overview and future research directions of undersea weapon design & optimization. In Proceedings of the 9th AIAA/ISSMO Symposium on Multidisciplinary Analysis and Optimization, Atlanta, GA, USA, 4–6 September 2002. [Google Scholar]
- Han, S.J.; Moon, K.H.; Ko, S.H.; Kim, J.K.; Moon, H.J.; You, Y.J.; Kwon, M.C. Feasibility study and demonstration of an underwater lab-scale hybrid rocket propulsion. In Proceedings of the 53rd AIAA/SAE/ASEE Joint Propulsion Conference, Atlanta, GA, USA, 10–12 July 2017. [Google Scholar]
- Hwang, H.S.; Kim, H.S.; You, Y.J. Analysis on initial stability test results of underwater vehicle using the HR propulsion system. In Proceedings of the Korean Society of Propulsion Engineers, Jeju, Korea, 31 May–2 June 2017. [Google Scholar]
- Woo, K.J.; Min, M.K.; Lee, J.H.; Choo, B.K.; Lee, S.H.; Kim, G.M.; Kim, H.J.; Kim, J.M.; Hwang, H.S.; You, Y.J. A Study of hybrid rocket for underwater operation. In Proceedings of the Korean Society of Propulsion Engineers, Jeju, Korea, 31 May–2 June 2017. [Google Scholar]
- Han, S.J.; Moon, K.H.; Ko, S.H.; Kim, J.K.; You, Y.J.; Kwon, M.C.; Moon, H.J. Ignition characteristics of hybrid underwater propulsion system with rupture disc. In Proceedings of the Korean Society of Propulsion Engineers, Pusan, Korea, 22–24 November 2016. [Google Scholar]
- Kim, S.J.; Kim, H.C.; Kim, K.H.; Park, Y.H.; Park, S.J.; Lee, D.G.; Kim, J.K.; Moon, H.J.; You, Y.J.; Kwon, M.C. Underwater combustion test using lab-scale hybrid rocket motor. In Proceedings of the Korean Society of Propulsion Engineers, Jeju, Korea, 25–27 May 2016. [Google Scholar]
- Juliet-Marine-Brochure-1. Available online: http://www.julietmarine.com/pdfs/Juliet-Marine-Brochure-1.pdf (accessed on 26 January 2019).
- Sakurai, T.; Tomizawa, T. Applicability of a LOx vaporization preburner for swirling-flow hybrid rocket engines. In Proceedings of the 51st AIAA/SAE/ASEE Joint Propulsion Conference, Orlando, FL, USA, 27–29 July 2015. [Google Scholar]
- Calabro, M. LOx/HTPB/AlH3 hybrid propulsion for launch vehicle boosters. In Proceedings of the 40th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Fort Lauderdale, FL, USA, 11–14 July 2004. [Google Scholar]
- Rice, E.; Gramer, D. Methane and methane/aluminum cryogenic hybrid rocket engines for Mars ISRU propulsion. In Proceedings of the 38th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 10–13 January 2000. [Google Scholar]
- Risha, G.; Boyer, E.; Wehrman, R.; Evans, B.; Kuo, K. Nano-sized aluminum and boron-based solid fuel characterization in a hybrid rocket engine. In Proceedings of the 39th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Huntsville, AL, USA, 20–23 July 2003. [Google Scholar]
- Marothiya, G.; Ramakrishna, P. Utilization of mechanically activated aluminum in hybrid rockets. J. Propuls. Power 2018, 34, 1206–1213. [Google Scholar] [CrossRef]
- Paccagnella, E.; Barato, F.; Pavarin, D.; Karabeyoğlu, A. Scaling parameters of swirling oxidizer injection in hybrid rocket motors. J. Propuls. Power 2017, 33, 1378–1394. [Google Scholar] [CrossRef]
- Arena, Z.; Athougies, A.; Rodulfo, A.; DeTurris, D. Swirl injection hybrid rocket motor design and testing. In Proceedings of the 47th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, San Diego, CA, USA, 31 July–3 August 2011. [Google Scholar]
- Kim, S.J.; Lee, J.P.; Moon, H.J.; Kim, J.K.; Sung, H.G.; Kwon, O.C. Regression characteristics of the cylindrical multiport grain in hybrid rockets. J. Propuls. Power 2013, 29, 573–581. [Google Scholar] [CrossRef]
- Kim, G.H. A Study on Combustion Characteristic of the Cylindrical Multi-Port Grain for Hybrid Rocket Motor Using PE/N2O. Master’s Thesis, Korea Aerospace University, Goyang, Korea, 20 January 2010. [Google Scholar]
- Kim, S.J.; Kim, J.K.; Moon, H.J.; Sung, H.G.; Lee, J.P.; Kim, G.H.; Cho, J.T.; Park, S.H. Combustion characteristics of the cylindrical multi-port grain for hybrid rocket motor. In Proceedings of the 45th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Denver, CO, USA, 2–5 August 2009. [Google Scholar]
- Kim, G.H.; Kim, S.J.; Lee, J.P.; Cho, J.T.; Moon, H.J.; Sung, H.G.; Kim, J.K. A study on merge effect in the multi-port fuel grain of hybrid rockets. In Proceedings of the 2009 Asia-Pacific International Symposium on Aerospace Technology, Gifu, Japan, 4–6 November 2009. [Google Scholar]
- Chen, K.; Richter, H. Instability analysis of the transition from bubbling to jetting in a gas injected into a liquid. Int. J. Multiph. Flow 1997, 23, 699–712. [Google Scholar] [CrossRef]
- Dai, Z.; Wang, B.; Qi, L.; Shi, H. Experimental study on hydrodynamic behaviors of high-speed gas jets in still water. Acta Mech. Sin. 2006, 22, 443–448. [Google Scholar] [CrossRef]
- Linck, M.B.; Gupta, A.K.; Yu, K.H. Submerged combustion and two-phase exhaust jet instabilities. J. Propuls. Power 2009, 25, 522–532. [Google Scholar] [CrossRef]
- Loth, E.; Faeth, G.M. Structure of plane under expanded air jets into water. J. AIChE 1990, 36, 818–826. [Google Scholar] [CrossRef]
- Shi, H.; Wang, B.; Dai, Z. Research on the mechanics of underwater supersonic gas jets. Sci. China Phys. Mech. 2010, 53, 527–535. [Google Scholar] [CrossRef]
- Shi, H.H.; Guo, Q.; Wang, C.; Dong, R.L.; Zhang, L.T.; Jia, H.X.; Wang, X.G.; Wang, B.Y. Oscillation flow induced by underwater supersonic gas jets. Shock Waves 2010, 20, 347–352. [Google Scholar] [CrossRef]
- Weiland, C.; Vlachos, P.P. Round gas jets submerged in water. Int. J. Multiph. Flow 2013, 48, 46–57. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Heading | Heading |
|---|---|
| Design thrust (kgf) | 50 |
| Oxidizer | Liquid nitrous oxide |
| Solid fuel | High density polyethylene (HDPE) |
| Igniter | Potassium nitrate/sorbitol (KNSB) propellant |
| Fuel density (kg/m3) | 950 |
| Burning time (s) | 10 |
| Oxidizer mass flow rate range (g/s) | 15–134 |
| Initial port diameter (mm) | 10 |
| Grain outer diameter (mm) | 104.5 |
| Port number | 5 |
| Grain length (mm) | 146 |
| Model | Supplier (Country) | Orifice Diameter (mm) | Temperature Rating (°C) | Pressure Rating (bar) |
|---|---|---|---|---|
| VL82A-D-4T-S | DK-lok (KOR) | 3.2 | −54 to 65 | 172 |
| Model | Supplier (Country) | Motor Type | Motion | Max. Resolution (deg/pulse) | Min. Resolution (deg/pulse) |
|---|---|---|---|---|---|
| MDrive 23 Plus | Schneider Electric (USA) | Stepping Motor | CW/CCW | 1.8 | 0.007 |
| Identifier | GT_Lab-01 | UT_Lab-01 | UT_Lab-02 | UT_Lab-03 | UT_Lab-04 |
|---|---|---|---|---|---|
| Test environment | Ground | Underwater | |||
| Oxidizer control valve angle (deg) | w/o v/v | w/o v/v | 52 | 54 | 56 |
| Average oxidizer mass flow rate (g/s) | 121.1 | 134.6 | 15.0 | 22.0 | 32.0 |
| Average fuel mass flow rate (g/s) | 21.2 | 21.8 | - | 8.5 | 10.5 |
| Average oxidizer-to-fuel (O/F) ratio | 5.7 | 6.2 | - | 2.6 | 3.0 |
| Rupture disc bursting pressure (bar) | 2 | 2 | 3 | 3 | 3 |
| Preset Ox. v/v opening pressure (bar) | 1.2 | 1.2 | 1.2 | 1.2 | 1.2 |
| Amount of pyrotechnic igniter (g) | 30 | 30 | 60 | 60 | 60 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moon, H.; Han, S.; You, Y.; Kwon, M. Hybrid Rocket Underwater Propulsion: A Preliminary Assessment. Aerospace 2019, 6, 28. https://doi.org/10.3390/aerospace6030028
Moon H, Han S, You Y, Kwon M. Hybrid Rocket Underwater Propulsion: A Preliminary Assessment. Aerospace. 2019; 6(3):28. https://doi.org/10.3390/aerospace6030028
Chicago/Turabian StyleMoon, Heejang, Seongjoo Han, Youngjun You, and Minchan Kwon. 2019. "Hybrid Rocket Underwater Propulsion: A Preliminary Assessment" Aerospace 6, no. 3: 28. https://doi.org/10.3390/aerospace6030028
APA StyleMoon, H., Han, S., You, Y., & Kwon, M. (2019). Hybrid Rocket Underwater Propulsion: A Preliminary Assessment. Aerospace, 6(3), 28. https://doi.org/10.3390/aerospace6030028