Electro-Actuation System Strategy for a Morphing Flap





Abstract
1. Introduction
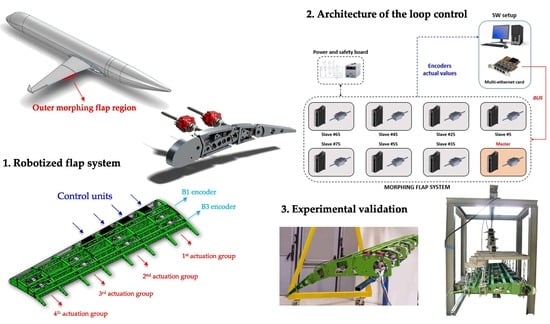
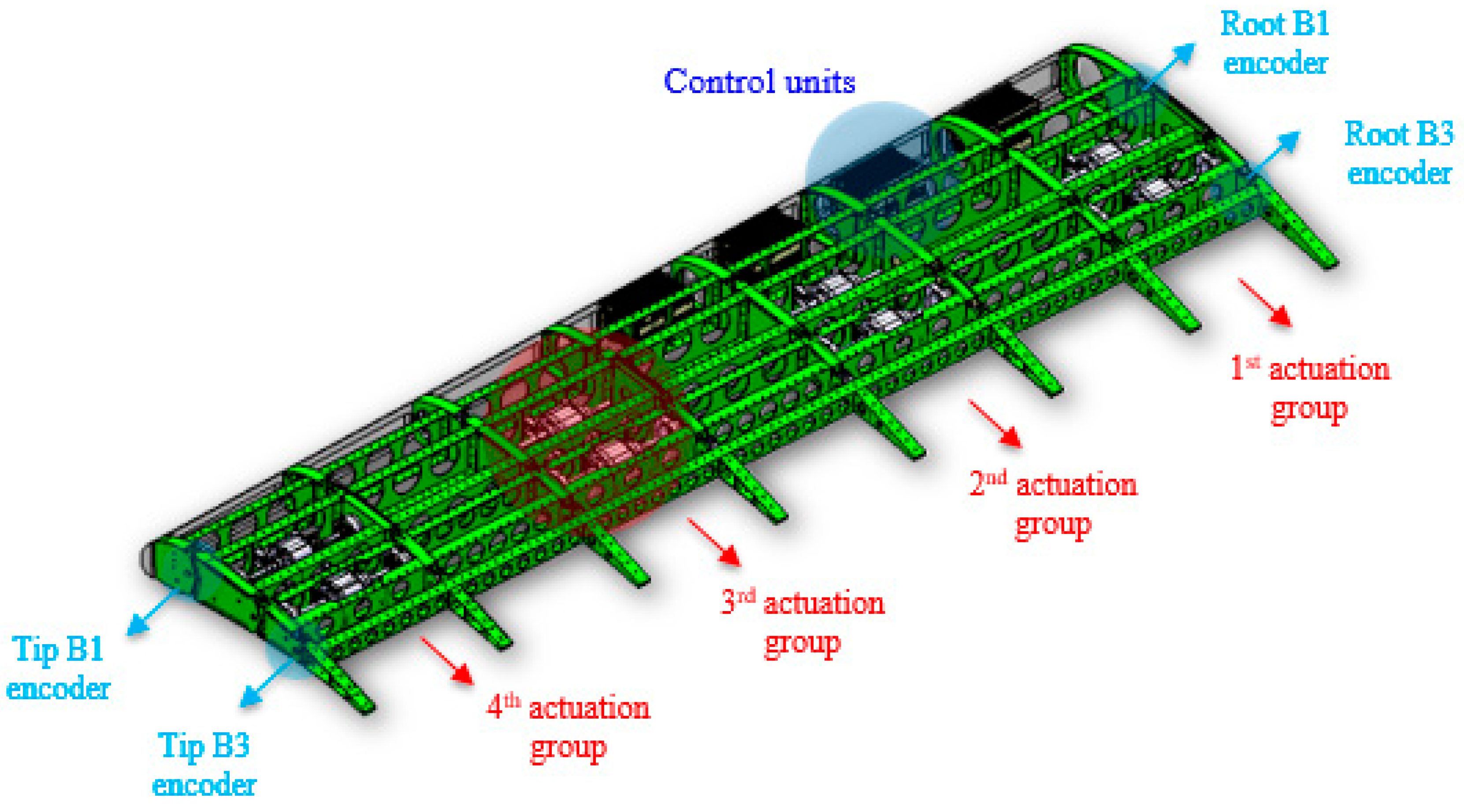
2. Robotized System Architecture
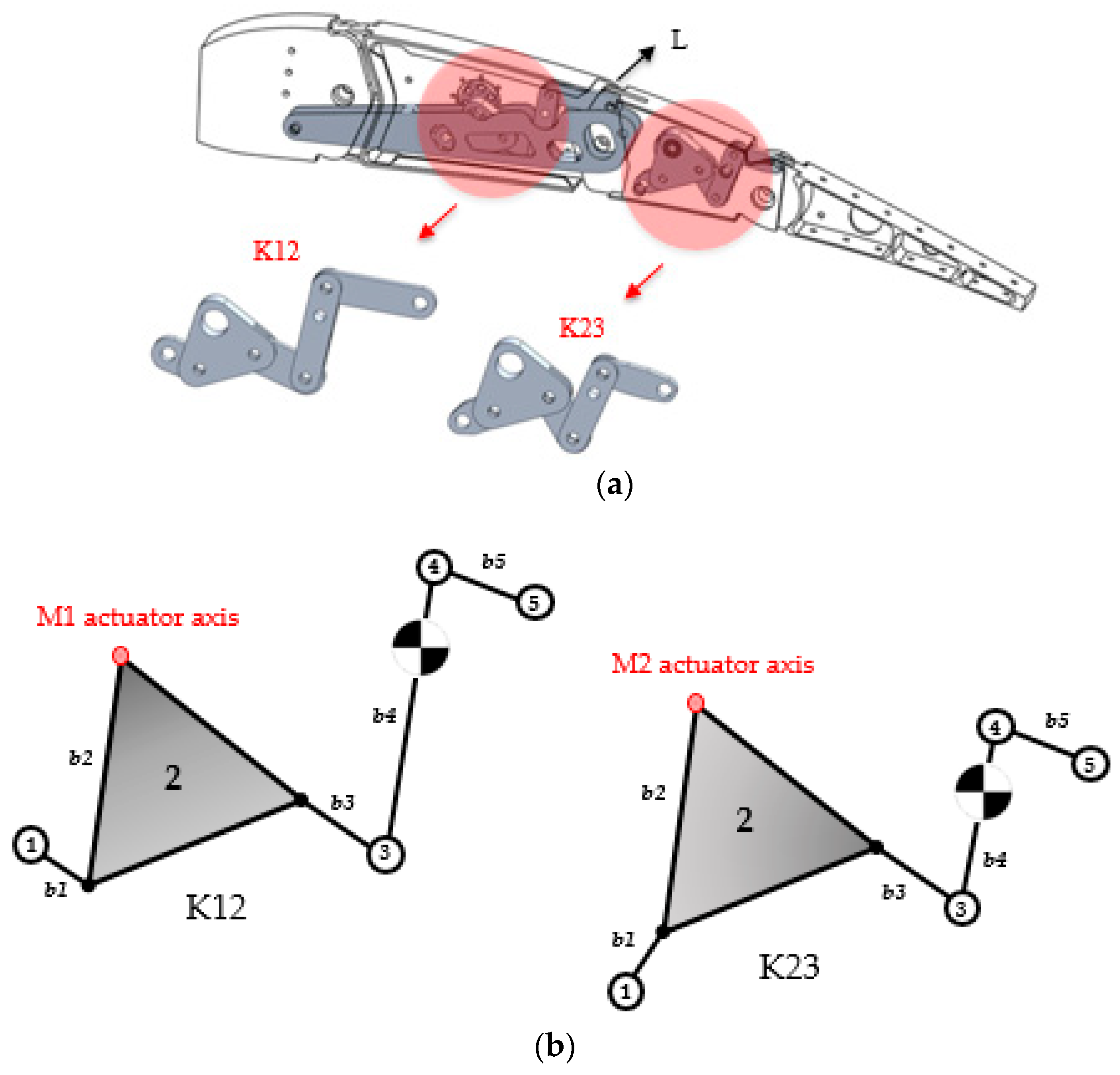
2.1. Mechanical Constraints
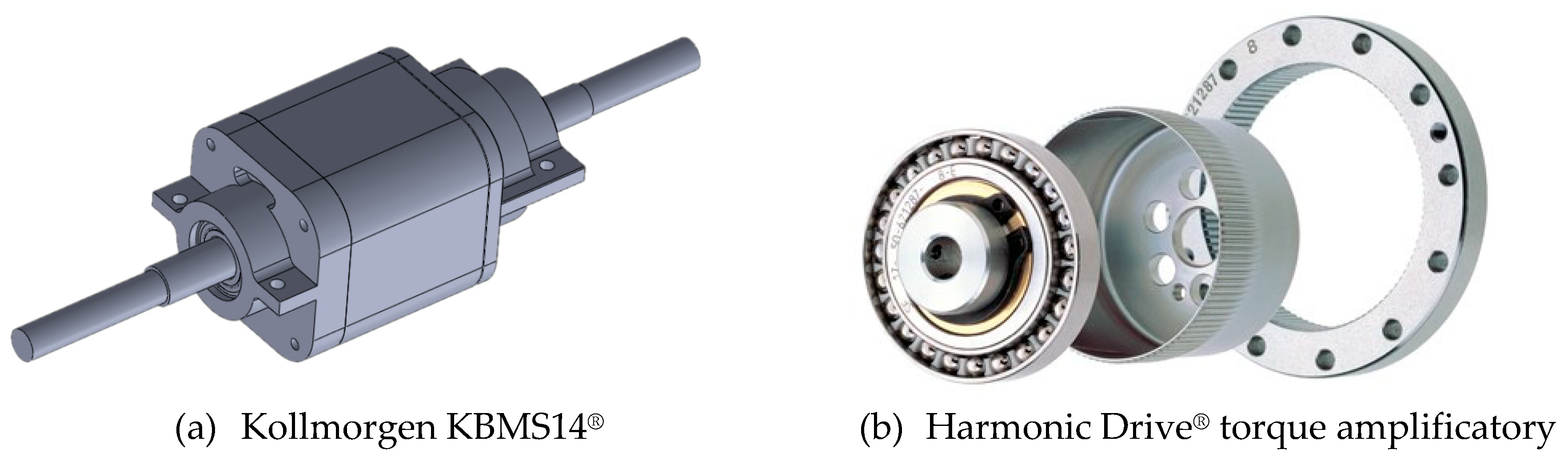
2.2. Actuation Design
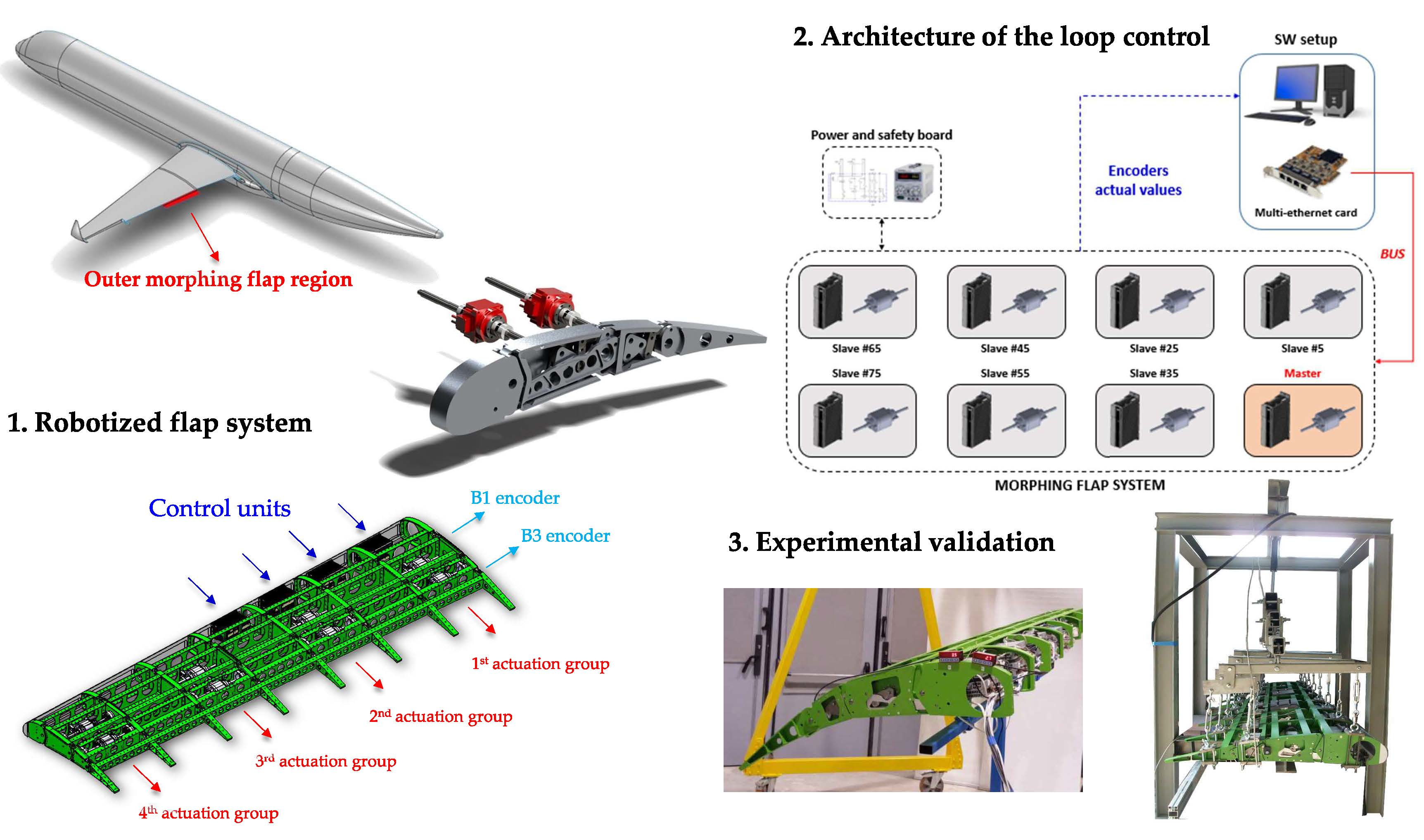
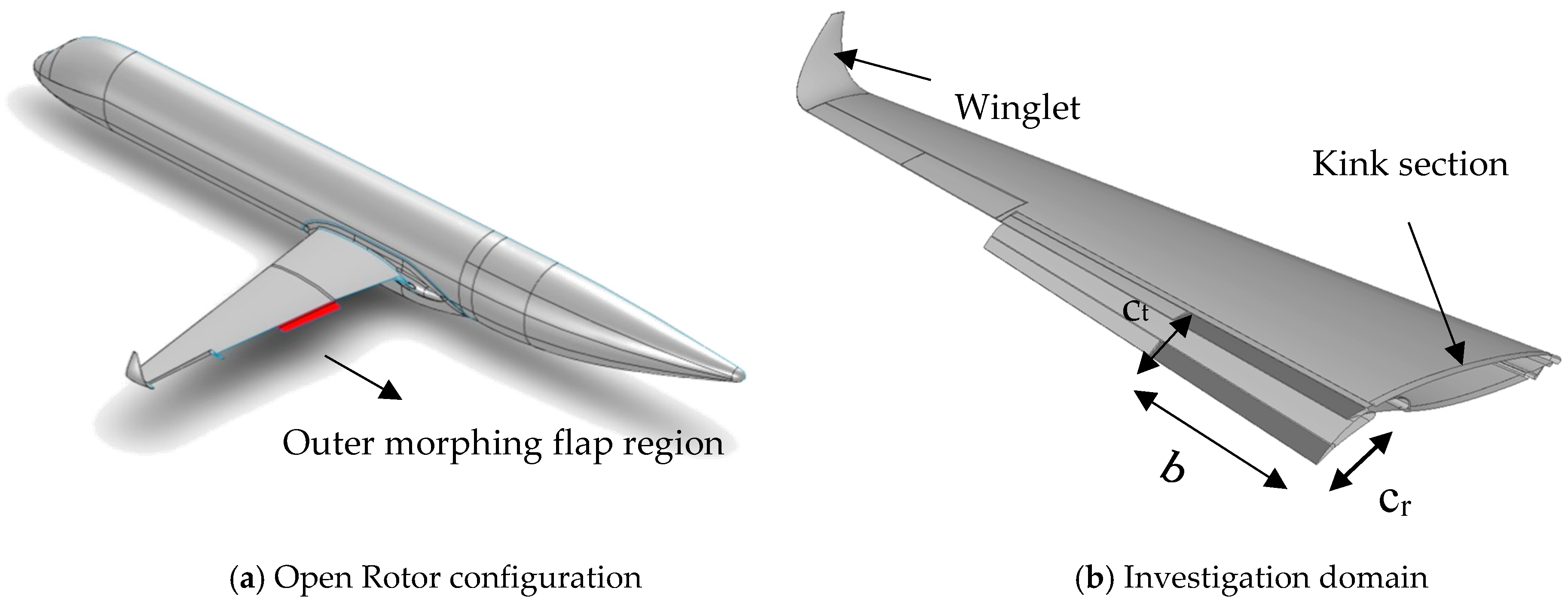
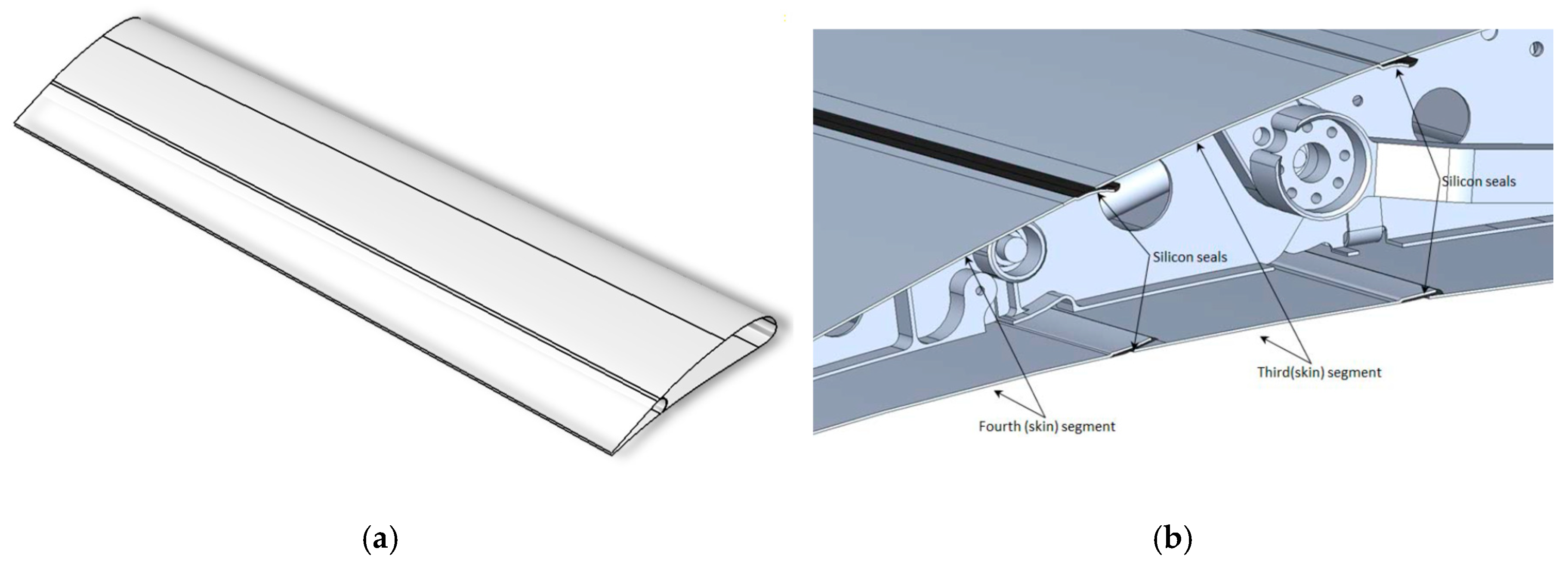
3. Morphing Flap Overview
Target Shapes and Specifications
4. Control Logic Strategy and Lab Test on Iron Bird
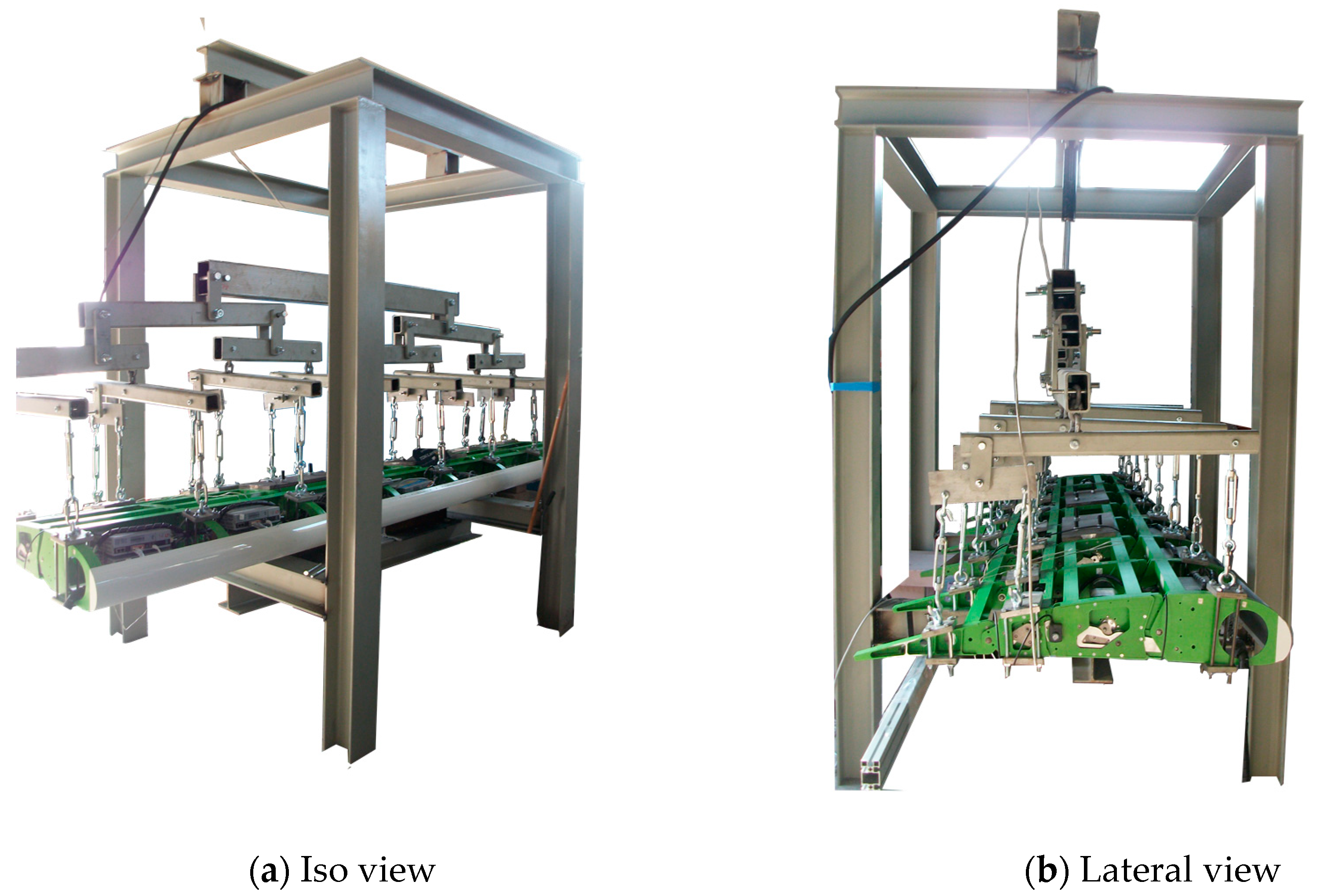
4.1. System Arrangement
- functionality test campaign;
- tatic test campaign;
- ground resonance test.
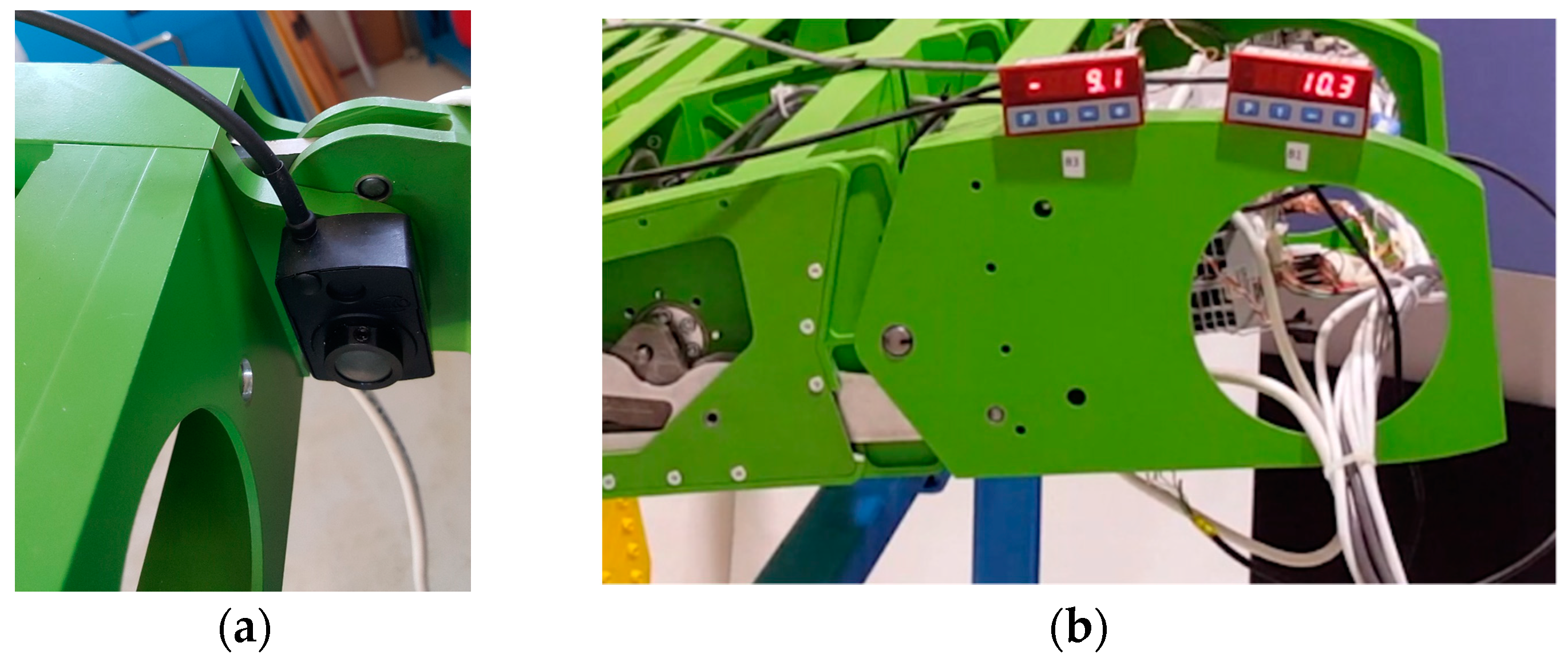
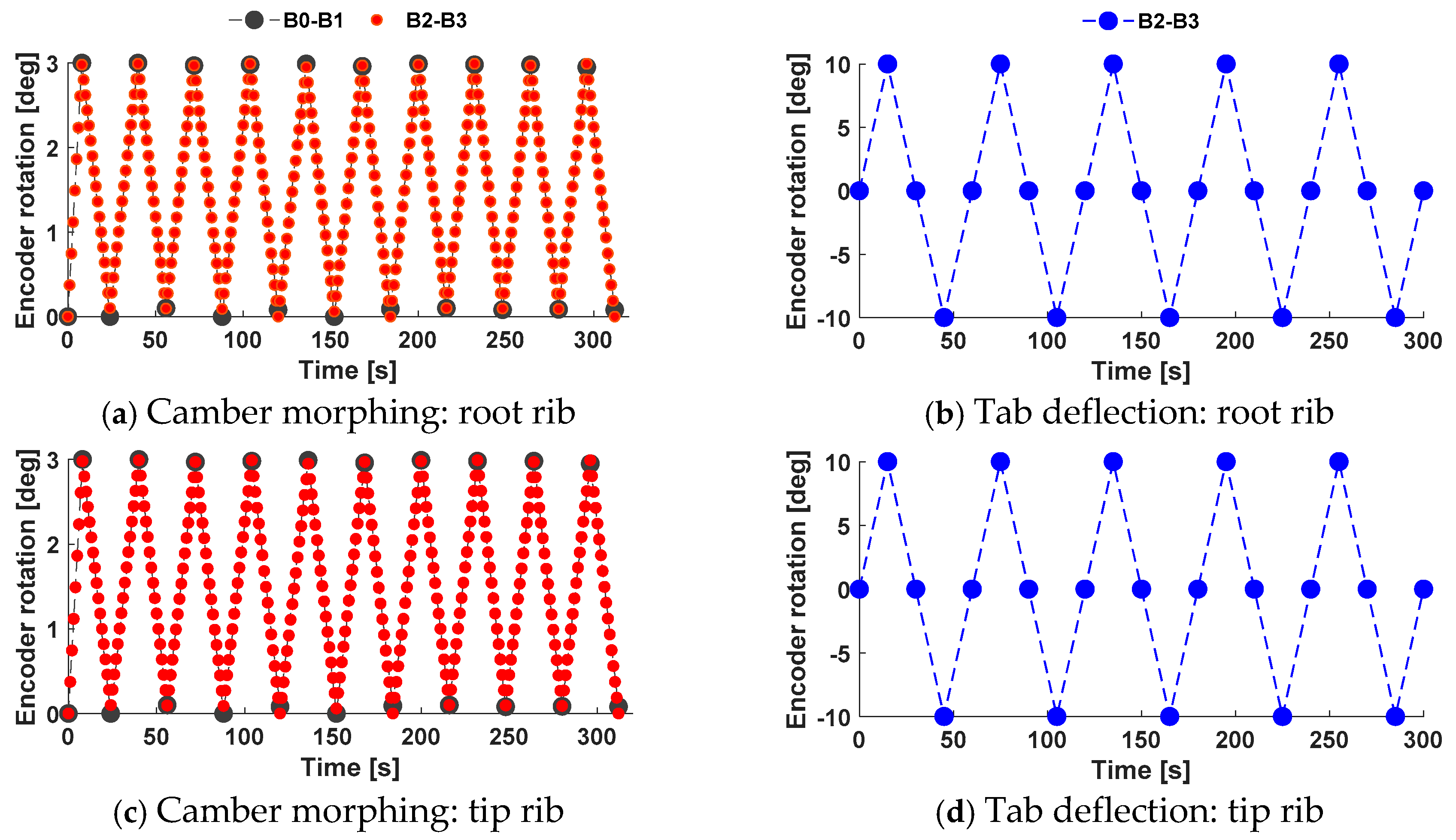
4.2. Functionality Test
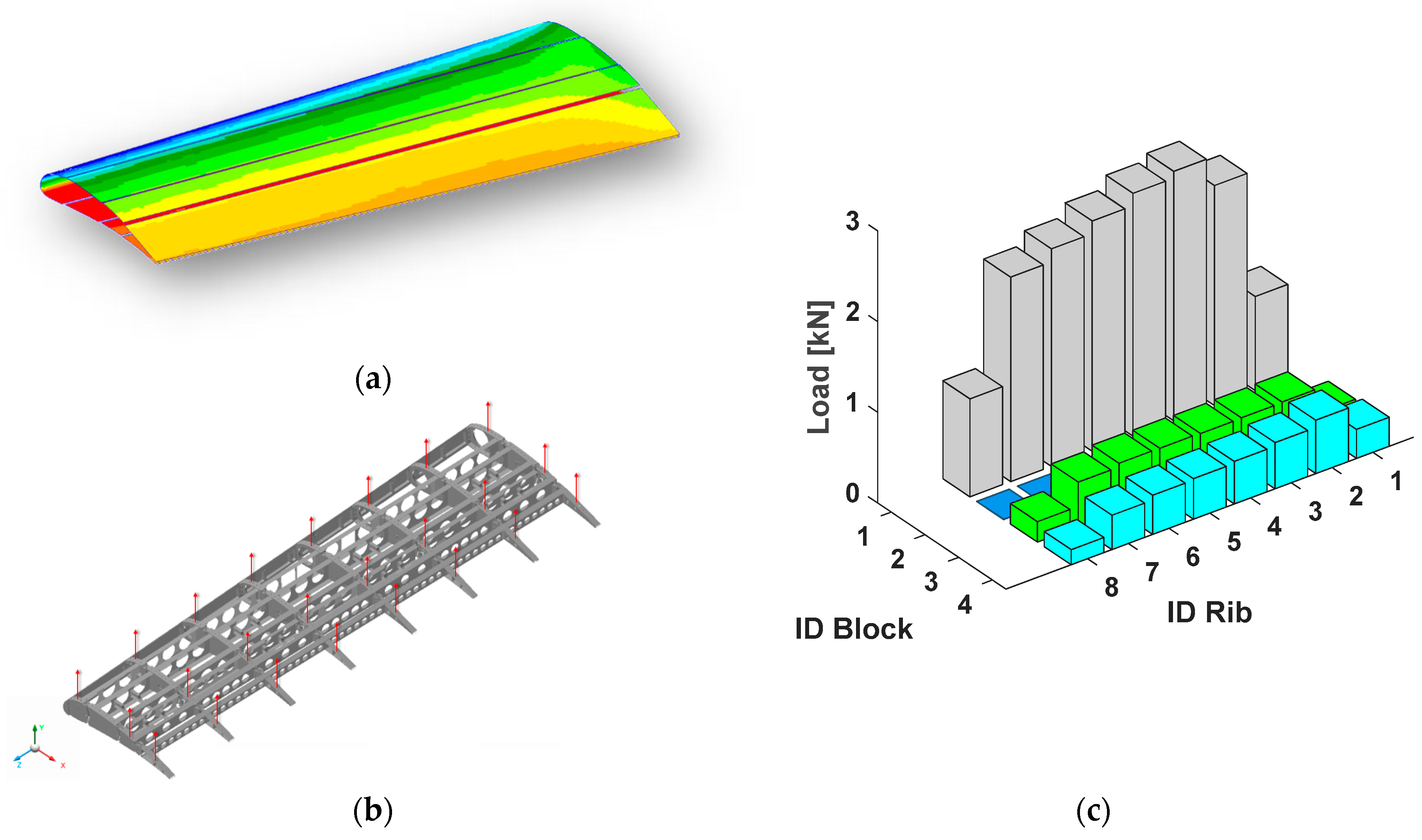
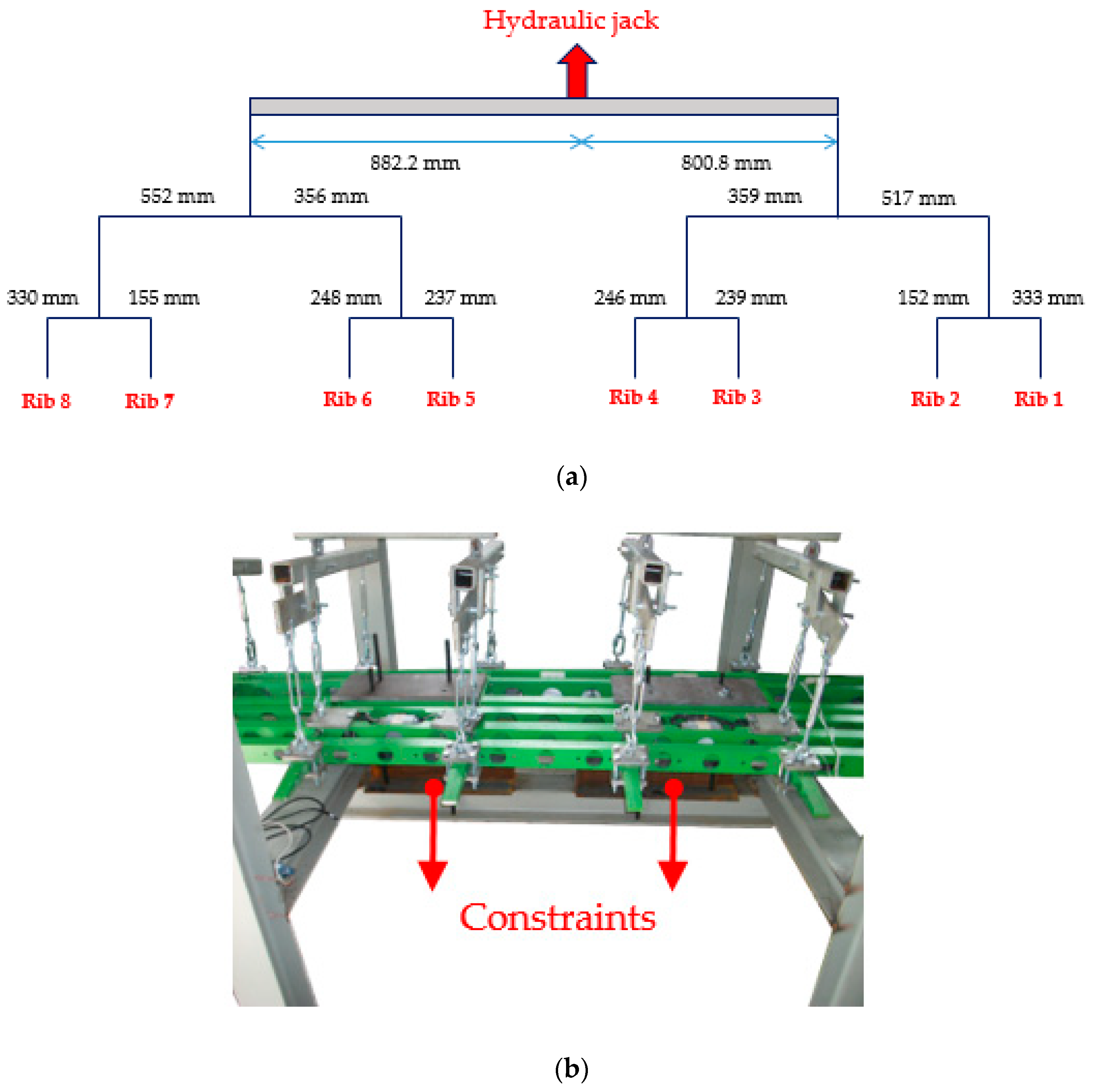
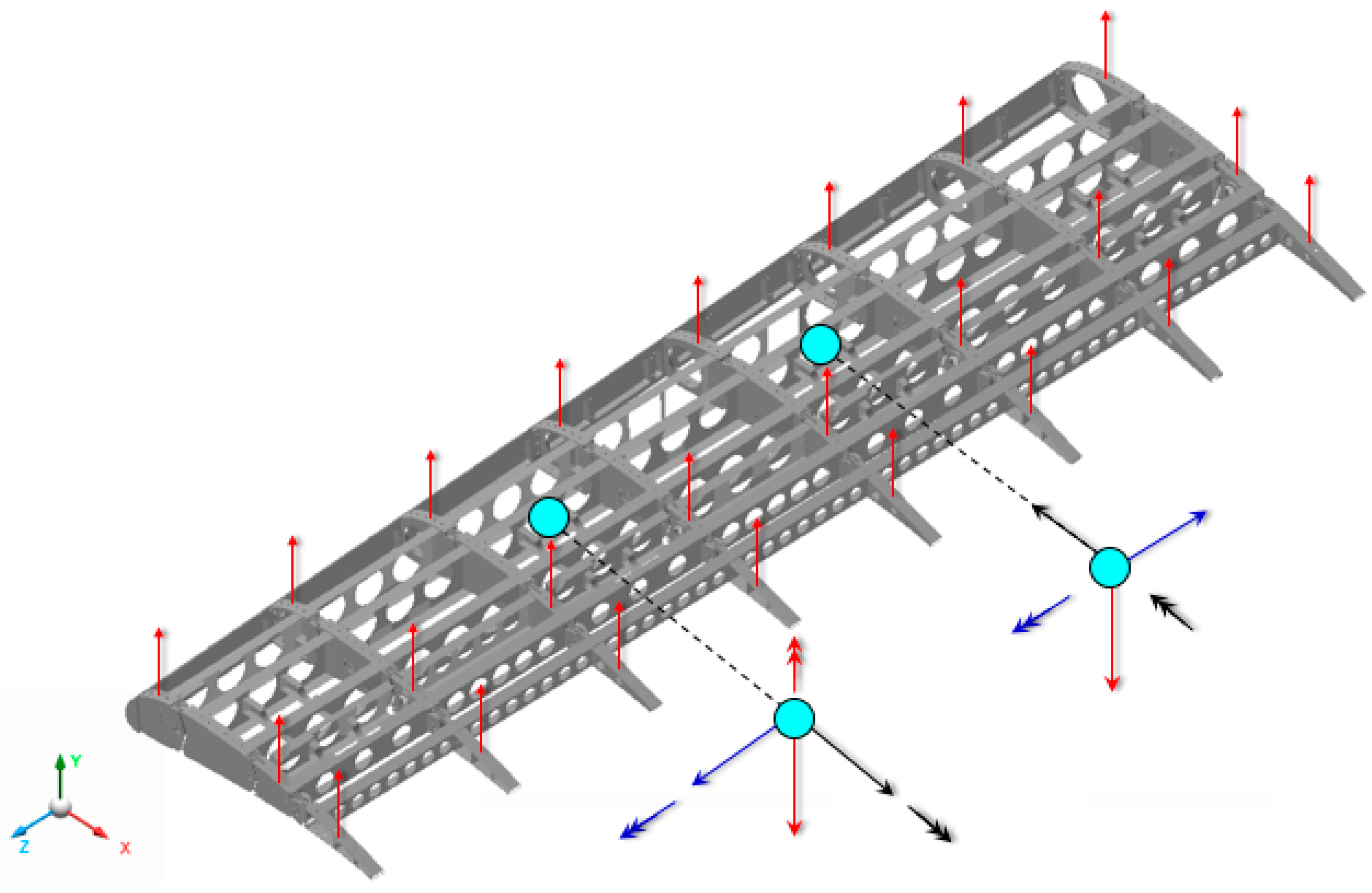
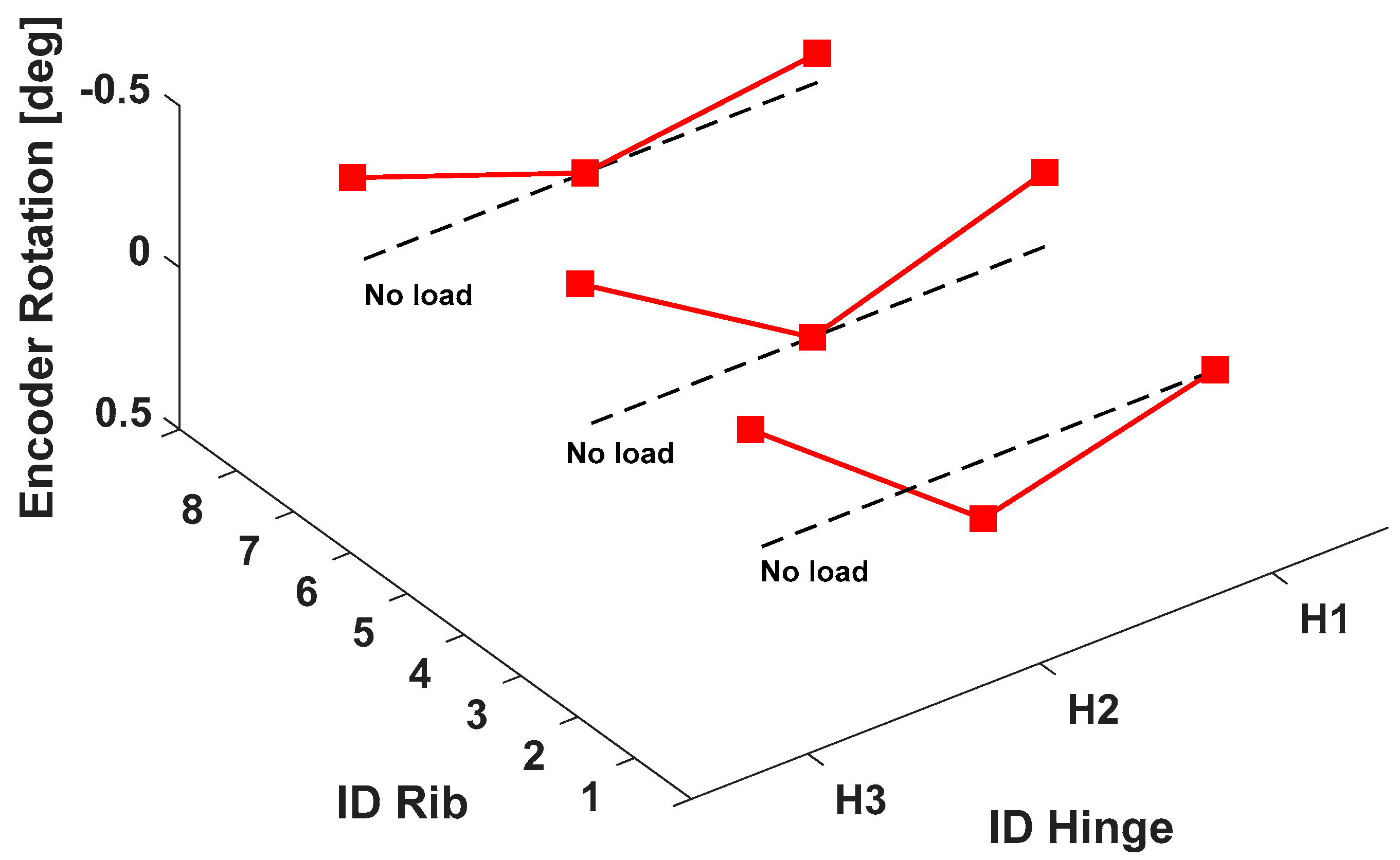
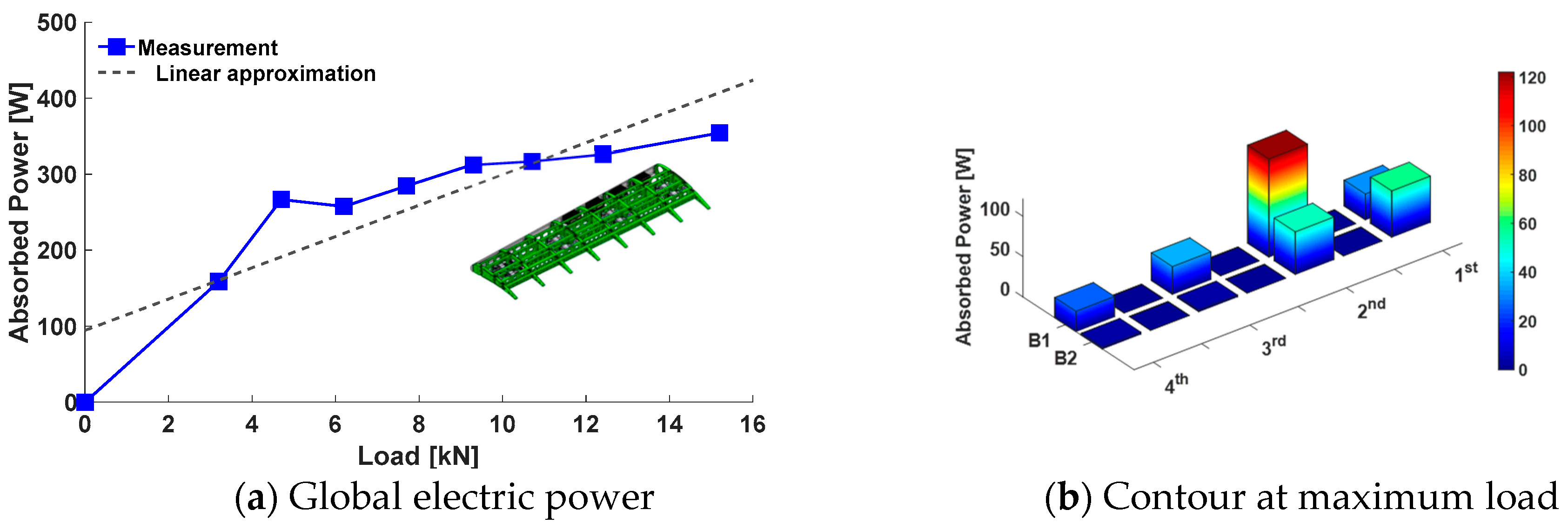
4.3. Static Test with Powered Actuators
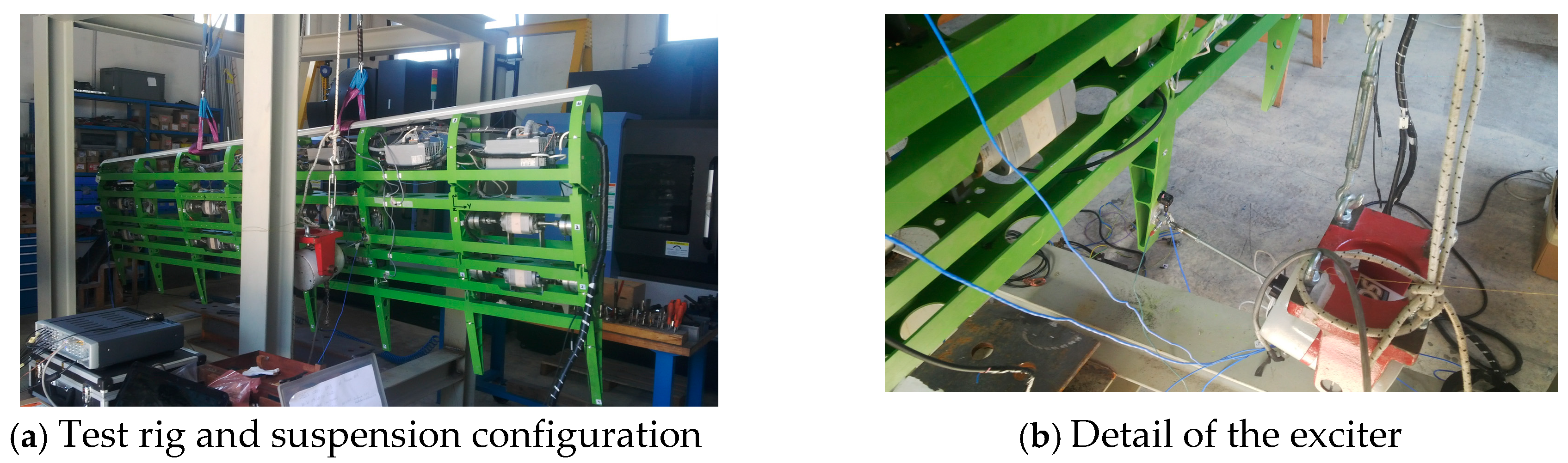
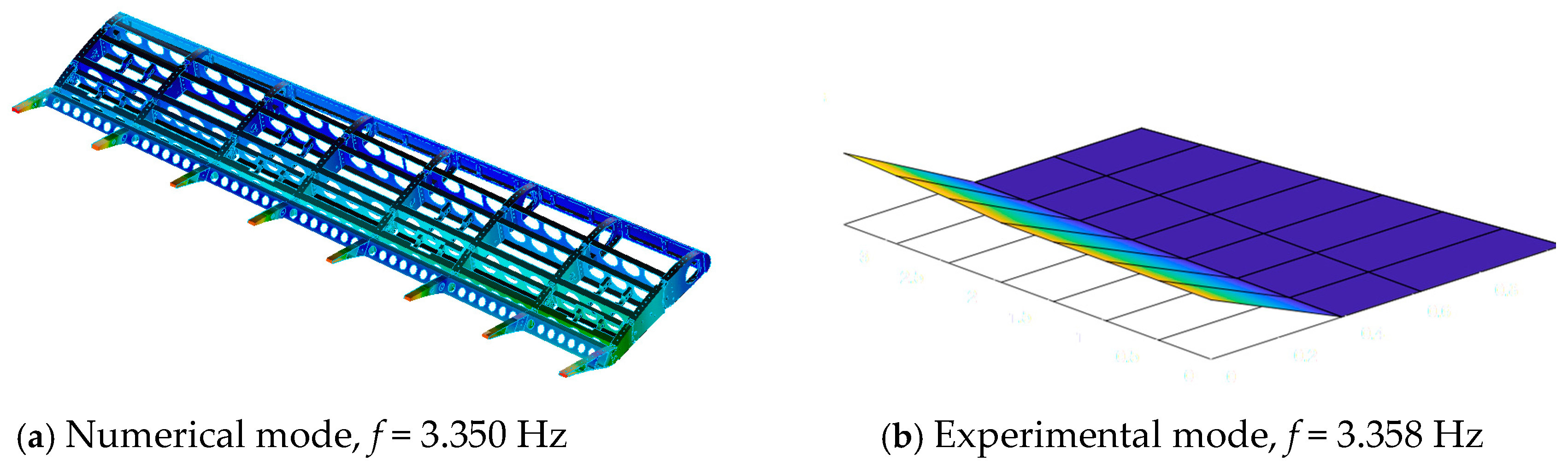
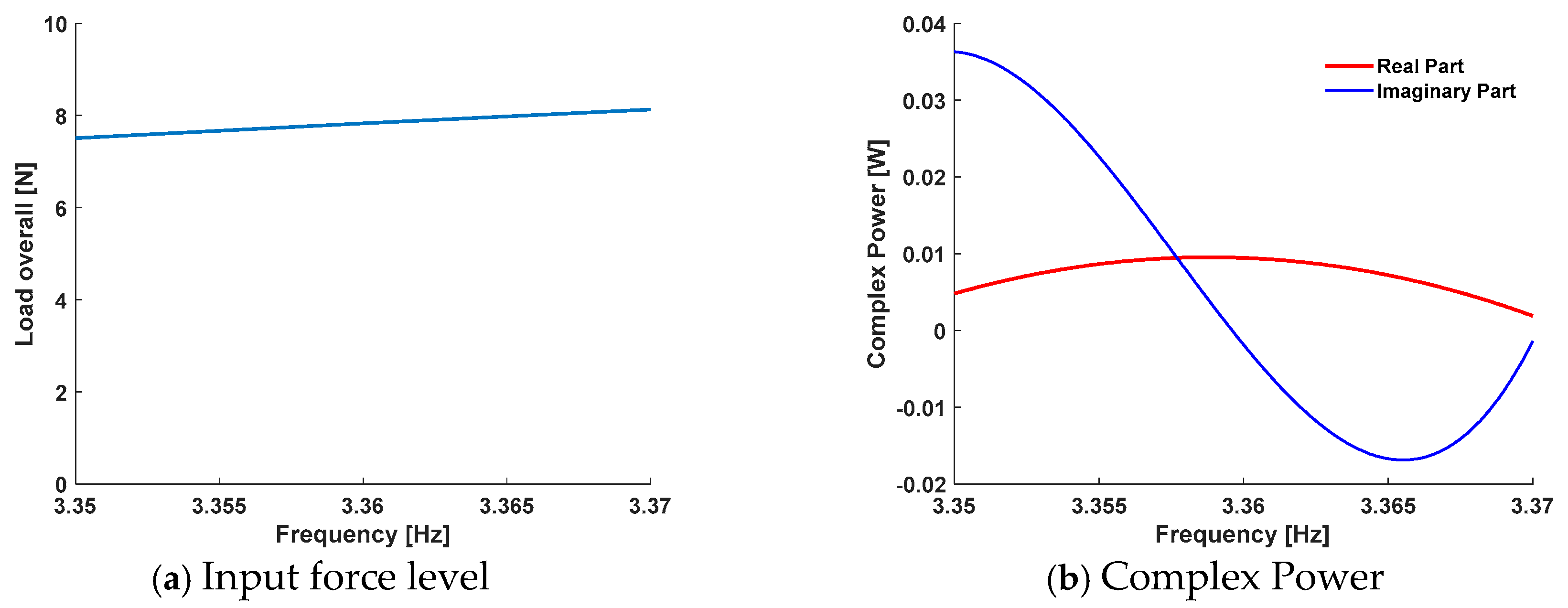
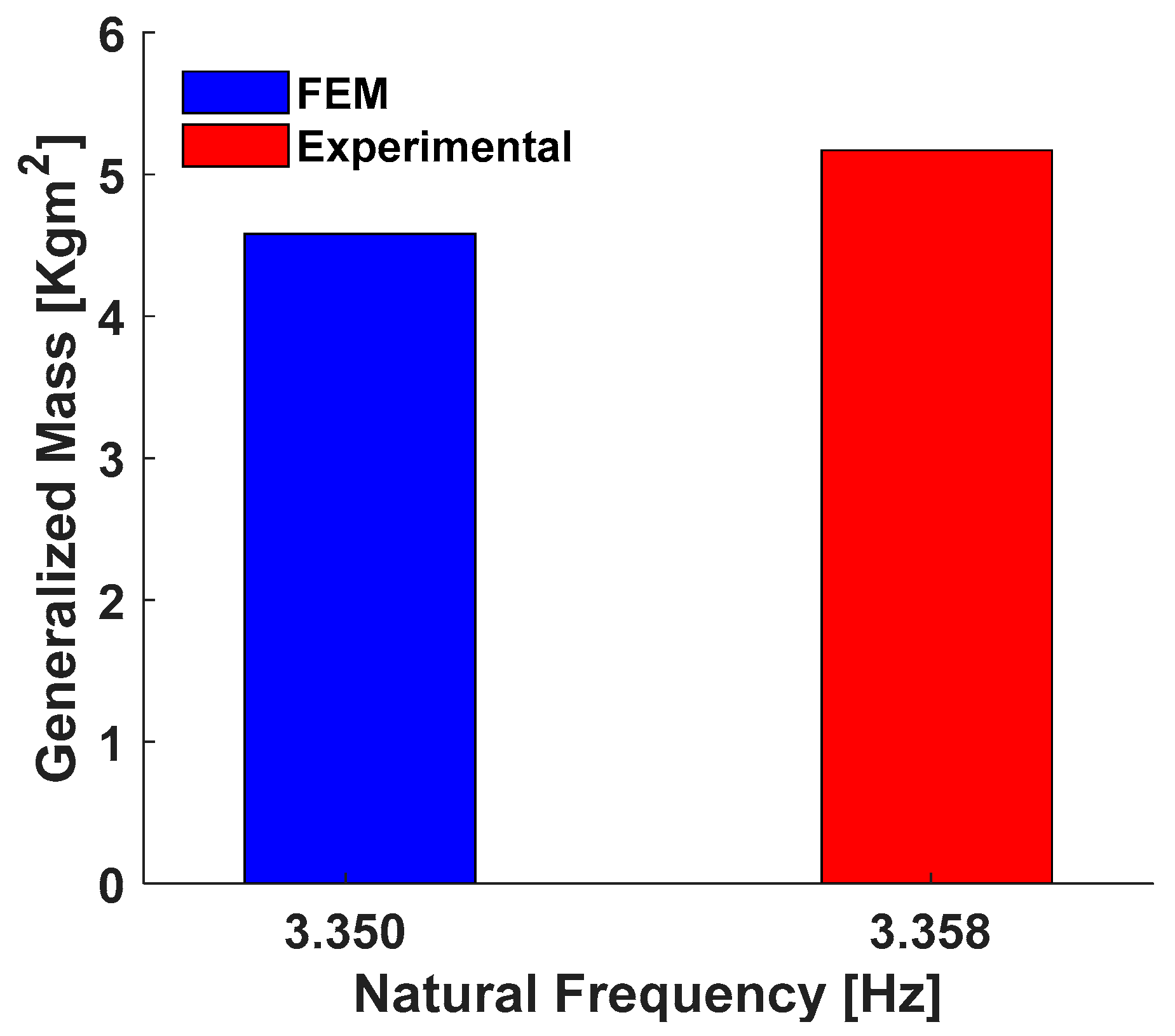
4.4. Dynamic Test
5. Conclusions
- demonstrate the morphing capability of the conceived structural layout;
- demonstrate the capability of the actuation system to withstand static loads representative of the limit aerodynamic pressures expected in service.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- ACARE Official Site. Available online: http://www.acare4europe.com/ (accessed on 17 December 2018).
- Official Site of Clean Sky Consortium. Available online: http://www.cleansky.eu/ (accessed on 17 December 2018).
- Pecora, R.; Amoroso, F.; Magnifico, M.; Dimino, I.; Concilio, A. KRISTINA: Kinematic rib-based structural system for innovative adaptive trailing edge. Proc. SPIE 2016, 9801. [Google Scholar] [CrossRef]
- Pecora, R.; Concilio, A.; Dimino, I.; Amoroso, F.; Ciminello, M. Structural Design of an Adaptive Wing Trailing Edge for Enhanced Cruise Performance. In Proceedings of the 24th AIAA/AHS Adaptive Structures Conference, San Diego, CA, USA, 4–8 January 2016. [Google Scholar]
- Dimino, I.; Diodati, G.; Concilio, A.; Volovick, A.; Zivan, L. Distributed Electromechanical Actuation System Design for a Morphing Trailing Edge Wing. Proc. SPIE 2016, 9801, 980108. [Google Scholar] [CrossRef]
- Wildschek, A.; Grünewald, M.; Maier, R.; Steigenberger, J.; Judas, M.; Deligiannidis, N.; Aversa, N. Multi-Functional Morphing Trailing Edge Device for Control of All-Composite, All-Electric Flying Wing Aircraft. In Proceedings of the 26th Congress of International Council of the Aeronautical Sciences (ICAS), Anchorage, AK, USA, 14–19 September 2008. [Google Scholar]
- Amendola, G.; Magnifico, M.; Pecora, R.; Dimino, I. Distributed Actuation Concepts for a Morphing Aileron device. Aeronaut. J. 2016, 120, 1365–1385. [Google Scholar] [CrossRef]
- Dimino, I.; Concilio, A.; Pecora, R. Safety and Reliability Aspects of an Adaptive Trailing Edge Device (ATED). In Proceedings of the 24th AIAA/AHS Adaptive Structures Conference, San Diego, CA, USA, 4–8 January 2016. [Google Scholar]
- Dimino, I.; Flauto, D.; Diodati, G.; Concilio, A.; Pecora, R. Actuation system design for a morphing wing trailing edge. Recent Pat. Mech. Eng. 2014, 7, 138–148. [Google Scholar] [CrossRef]
- Amendola, G.; Dimino, I.; Amoroso, F.; Pecora, R. Experimental characterization of an adaptive aileron: Lab tests and FE correlation. Proc. SPIE 2016, 9803. [Google Scholar] [CrossRef]
- Amendola, G.; Dimino, I.; Concilio, A.; Magnifico, M.; Pecora, R. Numerical design of an adaptive aileron. Proc. SPIE 2016, 9803. [Google Scholar] [CrossRef]
- Arena, M.; Amoroso, F.; Pecora, R.; Amendola, G.; Dimino, I.; Concilio, A. Numerical and experimental validation of a full scale servo-actuated morphing aileron model. Smart Mater. Struct. 2018, 27, 1–21. [Google Scholar] [CrossRef]
- Pecora, R.; Barbarino, S.; Concilio, A.; Lecce, L.; Russo, S. Design and Functional Test of a Morphing High-Lift Device for a Regional Aircraft. J. Intell. Mater. Syst. Struct. 2011, 22, 1005–1023. [Google Scholar] [CrossRef]
- Pecora, R.; Amoroso, F.; Amendola, F.; Concilio, A. Validation of a smart structural concept for wing-flap camber morphing. Smart Struct. Syst. 2014, 14, 659–678. [Google Scholar] [CrossRef]
- Rea, F.; Arena, M.; Noviello, M.C.; Pecora, R.; Amoroso, F. Preliminary failure analysis of an innovative morphing flap tailored for large civil aircraft applications. In Proceedings of the 2016 7th International Conference on Mechanical and Aerospace Engineering, London, UK, 18–20 July 2016; pp. 534–542. [Google Scholar]
- Noviello, M.C.; Rea, F.; Arena, M.; Pecora, R.; Amoroso, F. Actuation and control of a novel wing lap architecture with bi-modal camber morphing capabilities. In Proceedings of the 2016 7th International Conference on Mechanical and Aerospace Engineering, London, UK, 18–20 July 2016; pp. 426–431. [Google Scholar]
- Pecora, R.; Amoroso, F.; Magnifico, M. Toward the bi-modal camber morphing of large aircraft wing flaps: The CleanSky experience. Proc. SPIE 2016, 9801. [Google Scholar] [CrossRef]
- Pecora, R.; Magnifico, M.; Amoroso, F.; Monaco, E. Multi-parametric flutter analysis of a morphing wing trailing edge. Aeronaut. J. 2014, 118, 1063–1078. [Google Scholar] [CrossRef]
- Dimino, I.; Concilio, A.; Schueller, M.; Gratias, A. An Adaptive Control System for Wing TE Shape Control. In Proceedings of the SPIE International Conference on Smart Structures 2013, San Diego, CA, USA, 10–14 March 2013. [Google Scholar]
- Pecora, R.; Ameduri, S.; Rea, F. Active Metal Structures. In Morphing Wing Technologies Large Commercial Aircraft and Civil Helicopters; Elsevier: Amsterdam, The Netherlands, 2018; pp. 279–320. [Google Scholar]
- Amendola, G.; Dimino, I.; Concilio, A.; Pecora, R.; Amoroso, F.; Arena, M. Morphing Aileron. In Morphing Wing Technologies Large Commercial Aircraft and Civil Helicopters; Elsevier: Amsterdam, The Netherlands, 2018; pp. 547–582. [Google Scholar]
- Hasse, A.; Campanile, L.F. Design of compliant mechanisms with selective compliance. Smart Mater. Struct. 2009, 18, 115016. [Google Scholar] [CrossRef]
- Baker, D.; Friswell, M.I. The Design of Morphing Aerofoils using Compliant Mechanisms. In Proceedings of the 19th International Conference on Adaptive Structures and Technologies, Ascona, Switzerland, 6–9 October 2008. [Google Scholar]
- Barbarino, S.; Pecora, R.; Lecce, L.; Concilio, A.; Ameduri, S.; De Rosa, L. Airfoil Structural Morphing Based on S.M.A. Actuator Series: Numerical and Experimental Results. J. Intell. Mater. Syst. Struct. 2011, 22, 987–1004. [Google Scholar] [CrossRef]
- Ameduri, S.; Concilio, A.; Pecora, R. A SMA-based morphing flap: Conceptual and advanced design. Smart Struct. Syts 2015, 16, 555–557. [Google Scholar] [CrossRef]
- Ameduri, S.; Concilio, A.; Pecora, R.; Karagiannis, D. A single slotted morphing flap based on SMA Technology. Smart Struct. Syst. 2016, 17, 819–835. [Google Scholar] [CrossRef]
- Bilgen, O.; Kochersberger, K.B.; Inman, D.J.; Ohanian, O.J., III. Novel, Bi-Directional, Variable Camber Airfoil via Macro-Fiber Composite Actuators. In Proceedings of the 50th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Palm Springs, CA, USA, 4–7 May 2009. [Google Scholar]
- Browman, J.; Sanders, B.; Weisshaar, T. Evaluating the Impact of Morphing Technologies on Aircraft Performance. In Proceedings of the Forty-Third AIAA Conference on Structures, Structural Dynamics and Materials, Denver, CO, USA, 22–25 April 2002. [Google Scholar]
- Munday, D.; Jacob, J. Active Control of Separation on a Wing with Conformal Camber. In Proceedings of the Thirty-Ninth AIAA Aerospace Science Meeting and Exhibit, Reno, NV, USA, 8–11 January 2001. [Google Scholar]
- Barbarino, S.; Ameduri, S.; Pecora, R. Wing chamber control architectures based on SMA: Numerical investigations. Proc. SPIE 2007, 6423, 64231E. [Google Scholar]
- Blondeau, J.; Pines, D. Pneumatic Morphing Aspect Ratio Wing. In Proceedings of the Forty-Fifth AIAA Conference on Structures, Structural Dynamics and Materials, Palm Springs, CA, USA, 19–22 April 2004. [Google Scholar]
- Popov, A.V.; Grigorie, T.L.; Botez, R.M.; Mébarki, Y.; Mamou, M. Modeling and testing of a morphing wing in open-loop architecture. J. Aircr. 2010, 47, 917–923. [Google Scholar] [CrossRef]
- Mingione, G. Preliminary Design of Wing Trailing Edge Morphing Architectures, JTI-GRA deliverable no. GRA2.2.1-TN-CIRAPlus-TECH-210105A. (Report of Clean Sky project—confidential).
- De Gaspari, A.; Gilardelli, A.; Ricci, S.; Airoldi, A.; Moens, F. Design of a leading edge morphing based on compliant structures for a twin-prop regional aircraft. In Proceedings of the 2018 AIAA/AHS Adaptive Structures Conference, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar]
- De Gaspari, A.; Ricci, S.; Riccobene, L. Design, manufacturing and wind tunnel test of a morphing wing based on compliant structures. In Proceedings of the 24th AIAA/AHS Adaptive Structures Conference, San Diego, CA, USA, 4–8 January 2016. [Google Scholar]
- De Gaspari, A.; Ricci, S.; Travaglini, L. Aeroelastic analysis of a regional aircraft with active camber morphing device. In Proceedings of the International Forum on Aeroelasticity and Structural Dynamics (IFASD 2015), Saint Petersburg, Russia, 28 June–2 July 2015. [Google Scholar]
- EASA. Certification Specifications and Acceptable Means of Compliance for Large Aeroplanes, CS-25; Amendment 11; EASA: Cologne, Germany, 2011. [Google Scholar]
- Pecora, R.; Amoroso, F.; Arena, M.; Noviello, M.C.; Rea, F. Experimental validation of a true-scale morphing flap for large civil aircraft applications. Proc. SPIE 2017, 10166, 101660L. [Google Scholar] [CrossRef]
- Pecora, R.; Amoroso, F.; Noviello, M.C.; Dimino, I.; Concilio, A. Aeroelastic stability analysis of a large civil aircraft equipped with morphing winglets and adaptive flap tabs. Proc. SPIE 2018, 10595. [Google Scholar] [CrossRef]
- Flore, L. The use of complex power method in experimental modal analysis. UPB Sci. Bull. Ser. D 2016, 78, 31–42. [Google Scholar]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification/Actuator Model | KBMS-14 | |
|---|---|---|
| Continuous Stall Torque | Nm | 2.11 |
| Peak Stall Torque | Nm | 5 |
| Maximum Speed | RPM | 8000 |
| Peak Current | Arms | 10 |
| Weight | Kg | 2.5 |
| Number of Poles | - | 8 |
| Speed Reducer Model | HFUC-17-2UH | |
|---|---|---|
| Gear Ratio | - | 120 |
| Maximum Torque | Nm | 54 |
| Maximum Speed | RPM | 60 |
| Moment stiffness | Nm/rad | 16 × 103 |
| Weight | Kg | 0.64 |
| Temperature range | °C | 0–60 |
| Relative Rotations Between: | Camber Morphing Mode | Tip Deflection |
|---|---|---|
| Rib blocks B0 and B1 | 3° | 0° |
| Rib blocks B1 and B2 | 10.5° | 0° |
| Rib blocks B2 and B3 | 3° | +10°; −10° |
| Camber Morphing Mode | Tip Deflection Mode |
|---|---|
| Voltage actuators activation; Control switch to desired mode; Actuation up to the target configuration; Actuators stop and acquisition of rib blocks relative rotations; Actuation reverse, up to the baseline configuration; Actuators stop, flap power off, check of the encoders displays for full rotation recovery. | Voltage actuators activation; Control switch to desired mode; Actuation up to the tip down configuration; Actuators stop and acquisition of rib blocks relative rotations; Actuation reverse up to the baseline configuration; Actuation up to the tip up configuration; Actuators stop and acquisition of rib blocks relative rotations; Actuation reverse up to the baseline configuration; Actuators stop, flap power off, check of the encoders displays for full rotation recovery. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arena, M.; Amoroso, F.; Pecora, R.; Ameduri, S. Electro-Actuation System Strategy for a Morphing Flap. Aerospace 2019, 6, 1. https://doi.org/10.3390/aerospace6010001
Arena M, Amoroso F, Pecora R, Ameduri S. Electro-Actuation System Strategy for a Morphing Flap. Aerospace. 2019; 6(1):1. https://doi.org/10.3390/aerospace6010001
Chicago/Turabian StyleArena, Maurizio, Francesco Amoroso, Rosario Pecora, and Salvatore Ameduri. 2019. "Electro-Actuation System Strategy for a Morphing Flap" Aerospace 6, no. 1: 1. https://doi.org/10.3390/aerospace6010001
APA StyleArena, M., Amoroso, F., Pecora, R., & Ameduri, S. (2019). Electro-Actuation System Strategy for a Morphing Flap. Aerospace, 6(1), 1. https://doi.org/10.3390/aerospace6010001