Experimental Implementation of a Passive Millimeter-Wave Fast Sequential Lobing Radiometric Seeker Sensor


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. General Theory
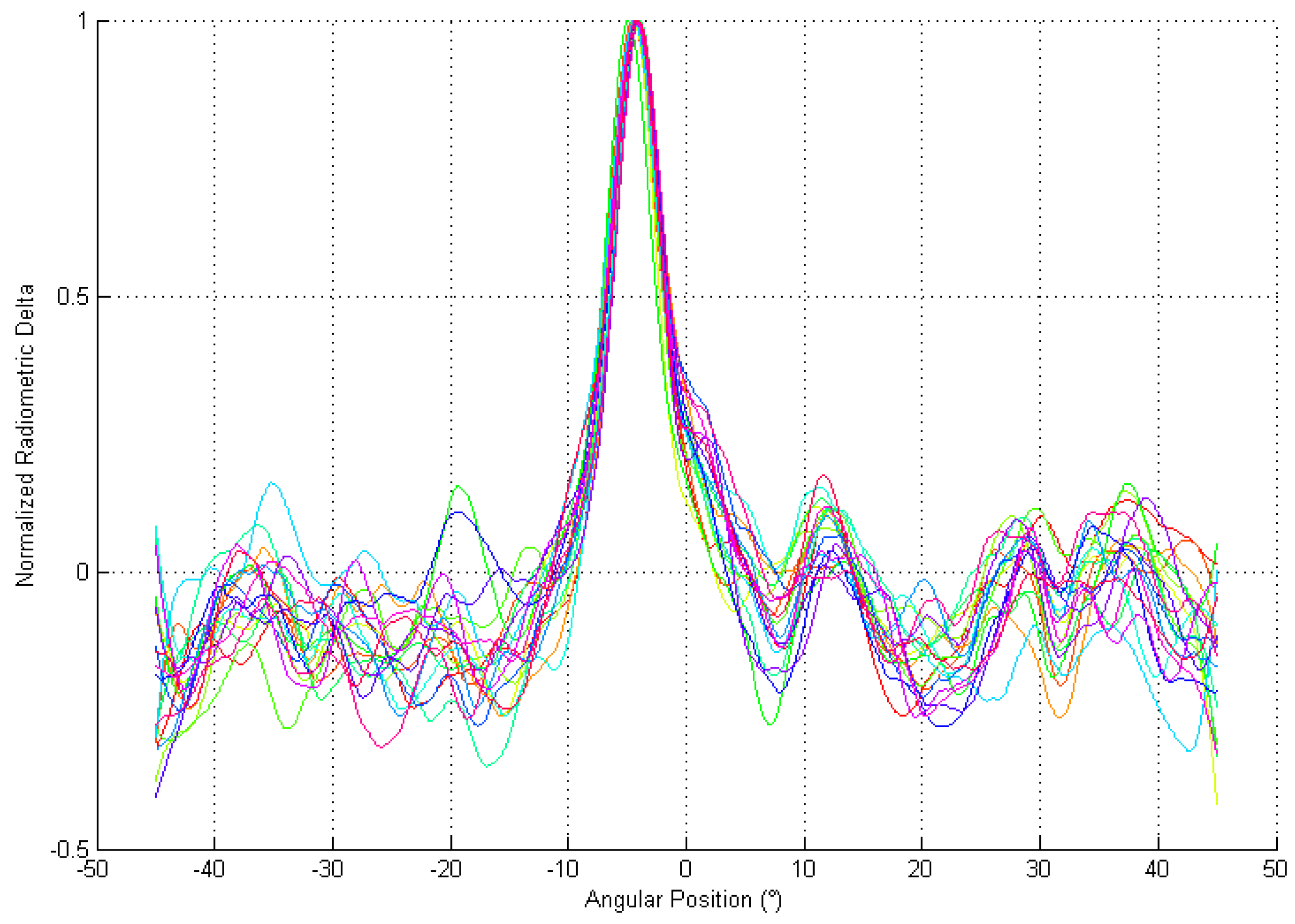
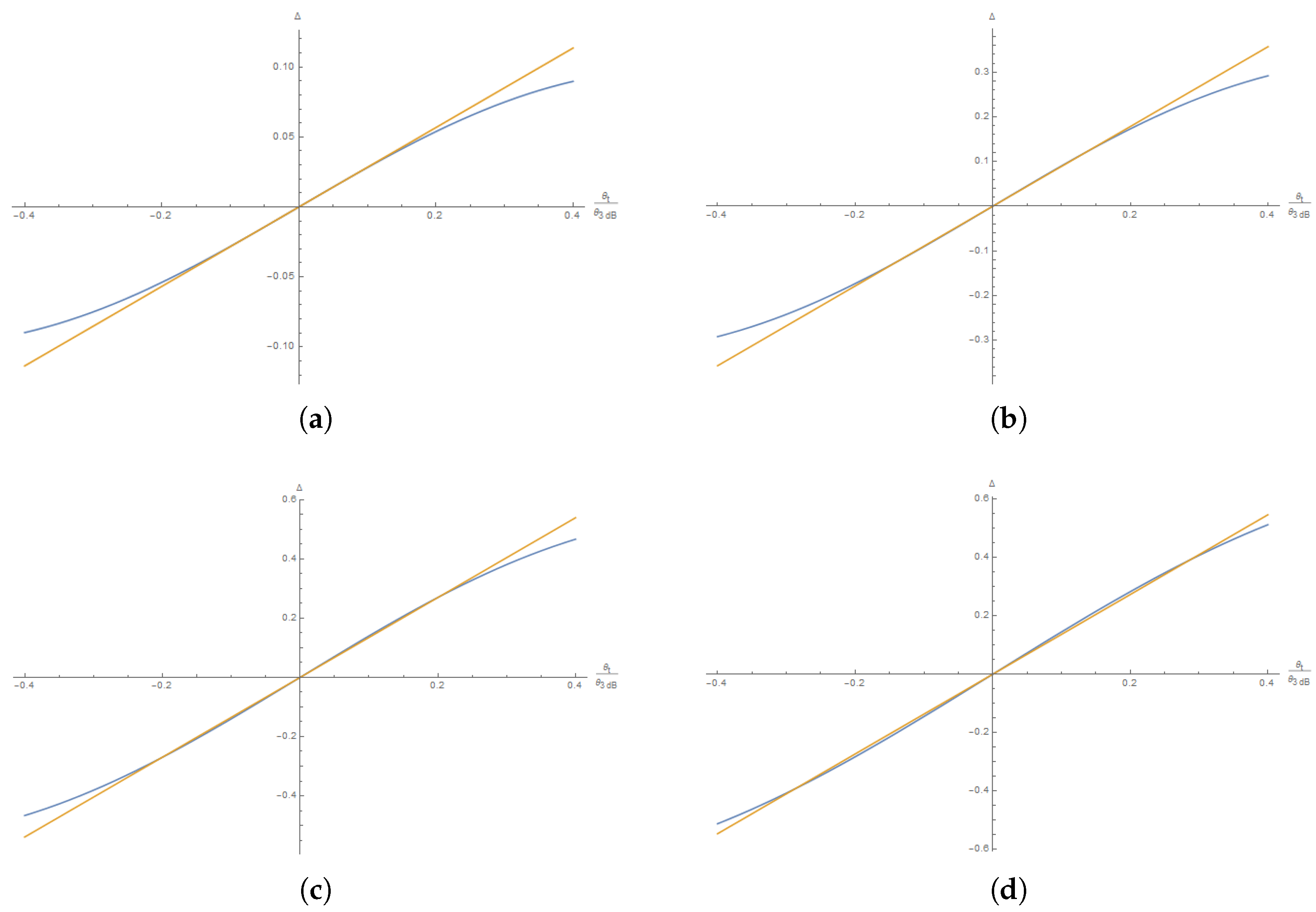
3. Radiometric Delta Signals Calculation
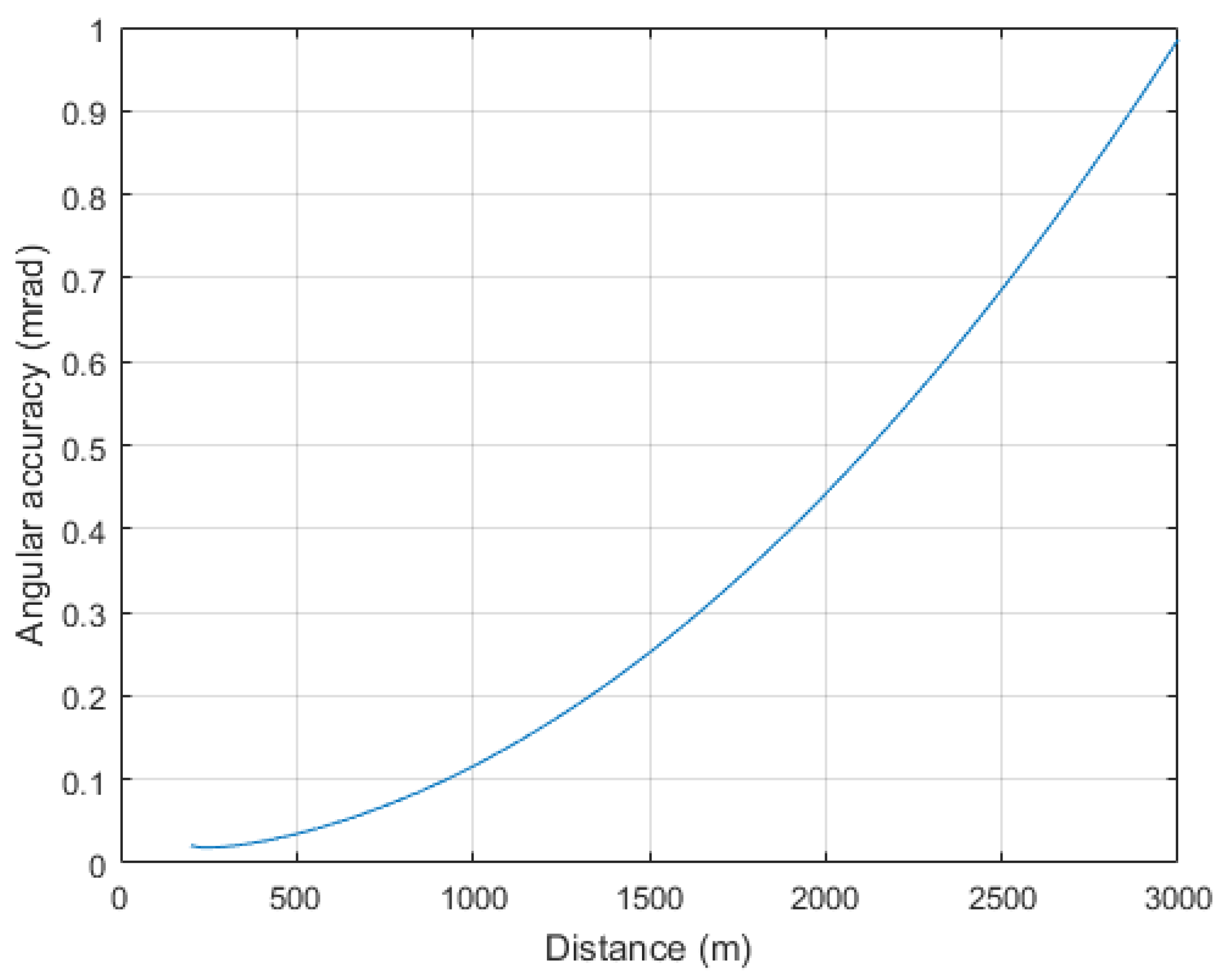
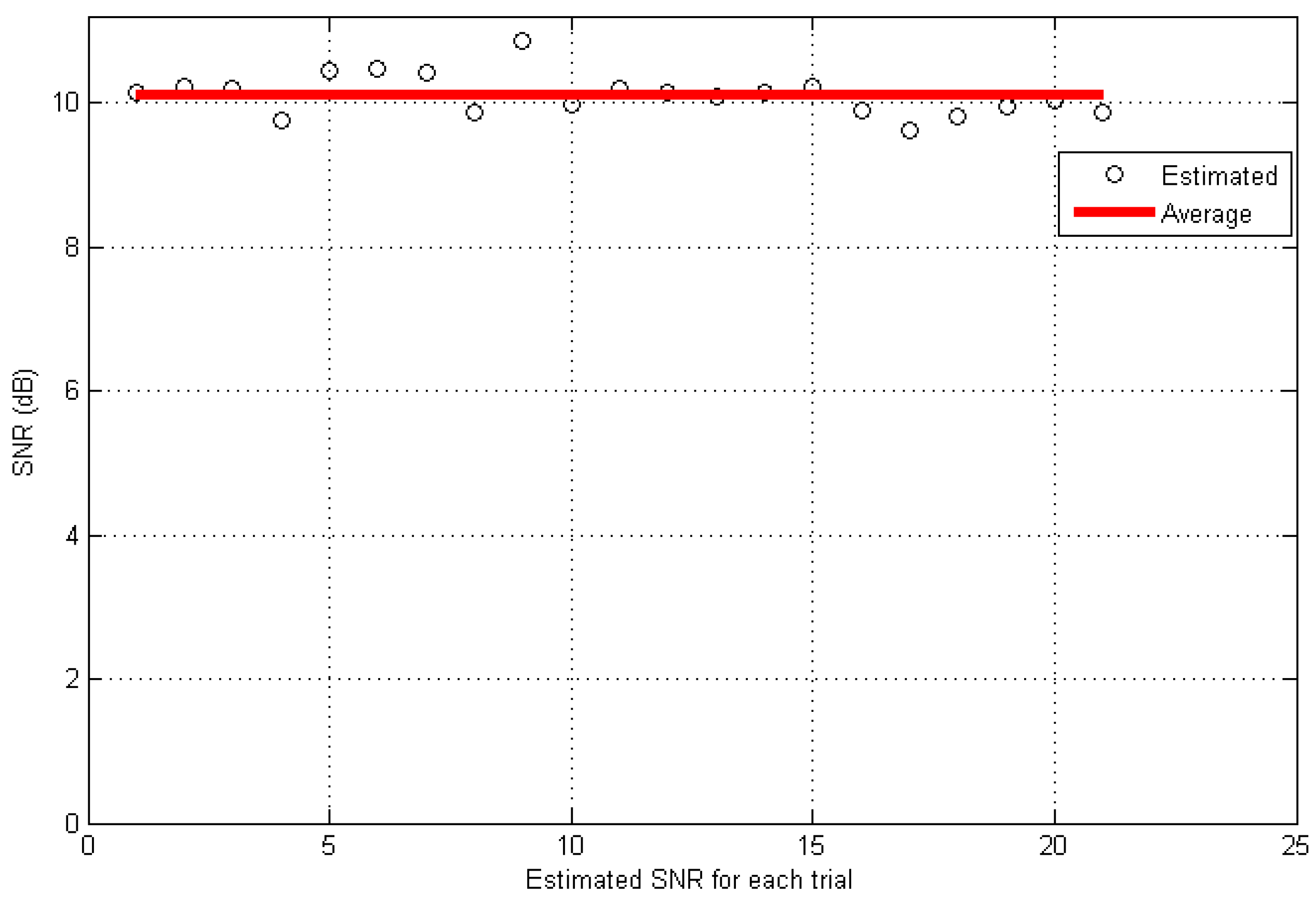
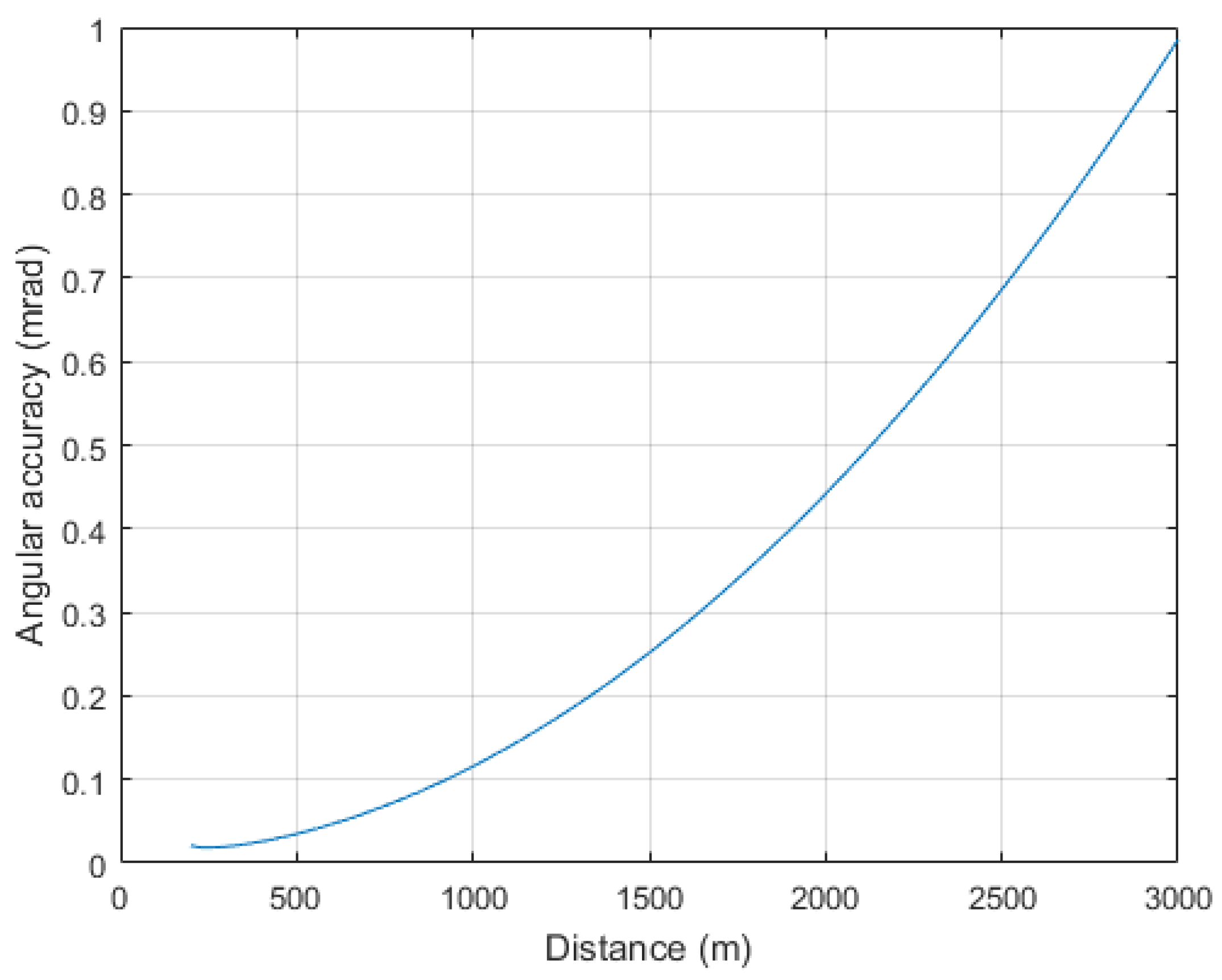
4. Angular Accuracy Estimation
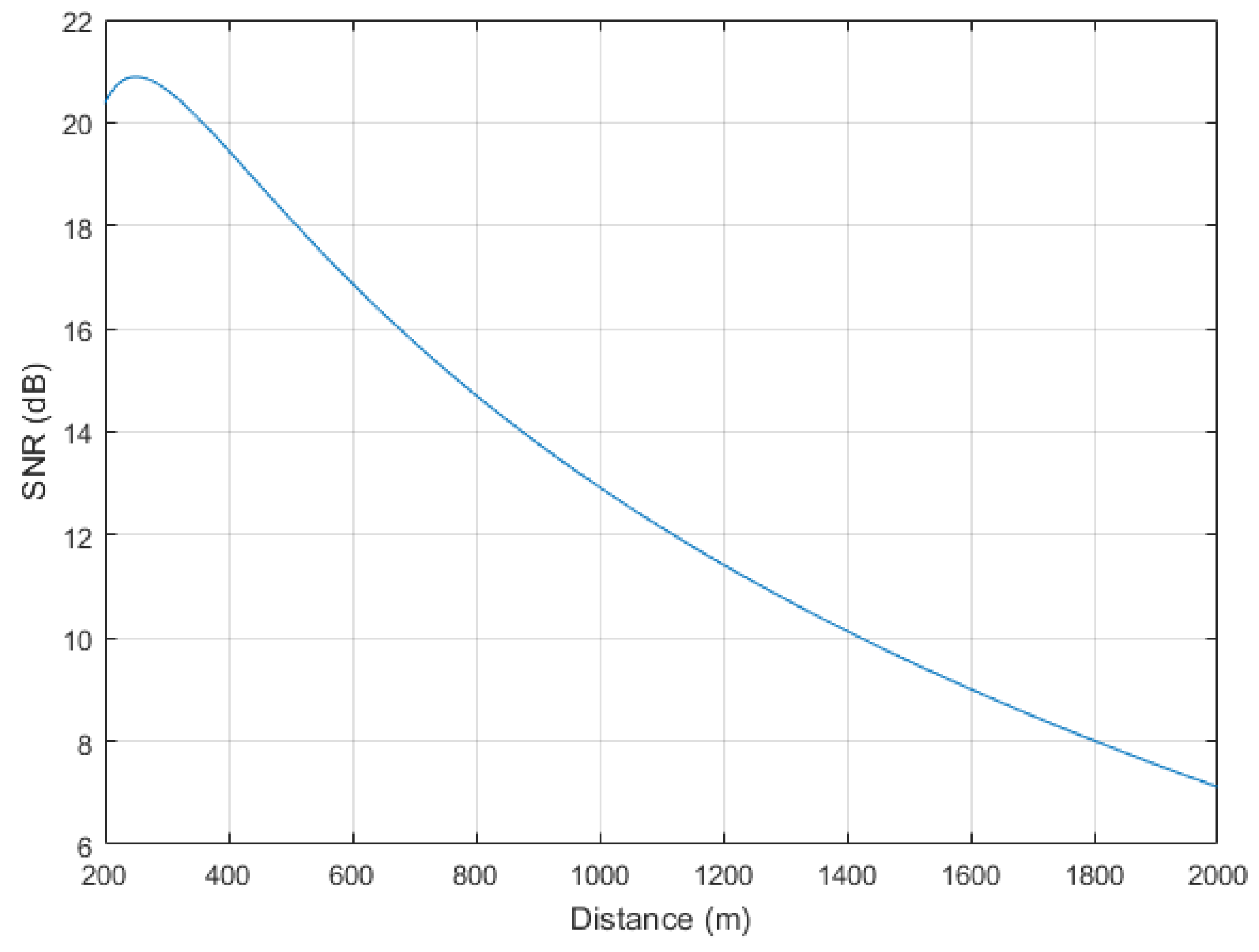
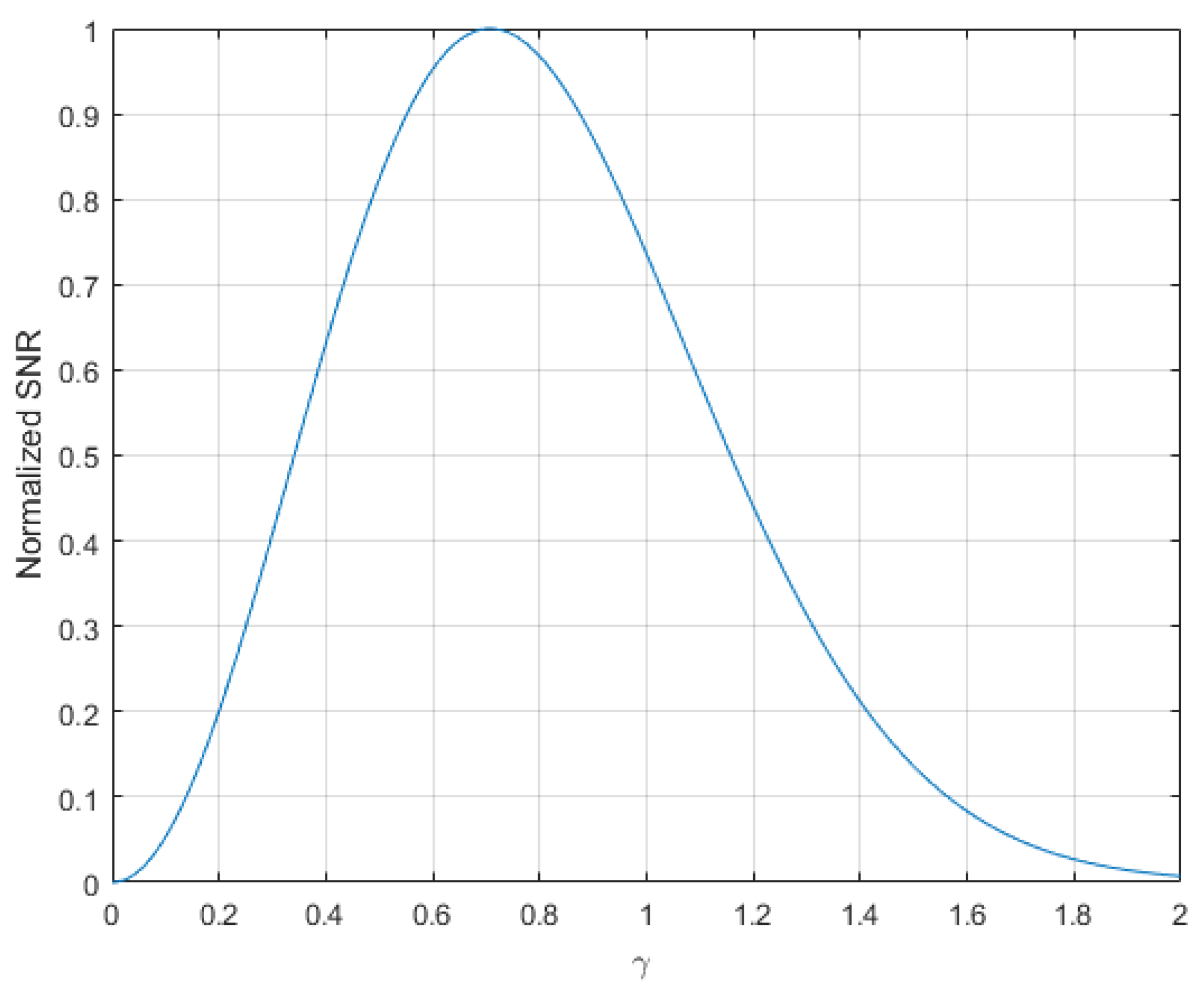
5. Estimated Results
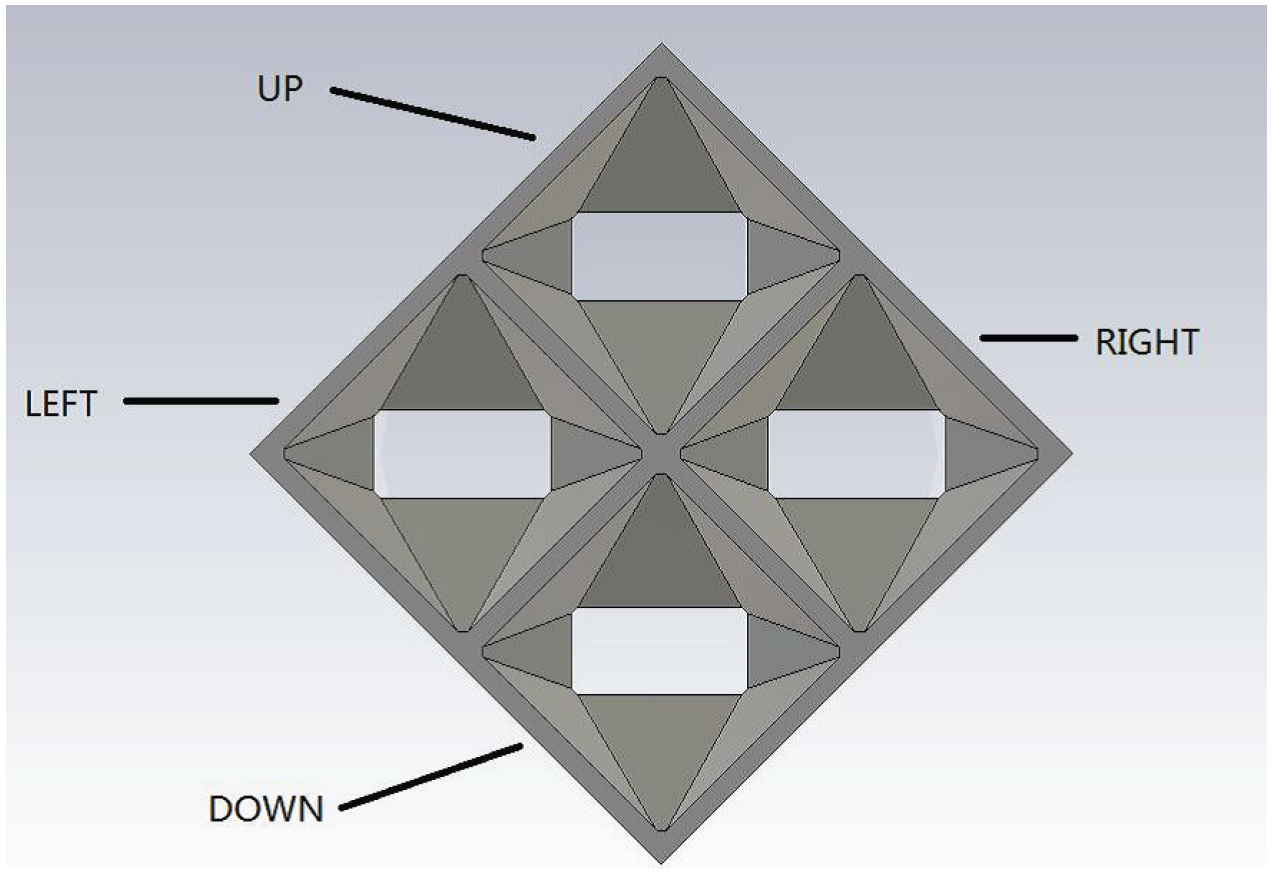
6. Extension to a Pseudo-Monopulse Architecture
- X1 is a Gaussian random variable with expected value and variance .
- Y1 is a Gaussian random variable with expected value and variance .
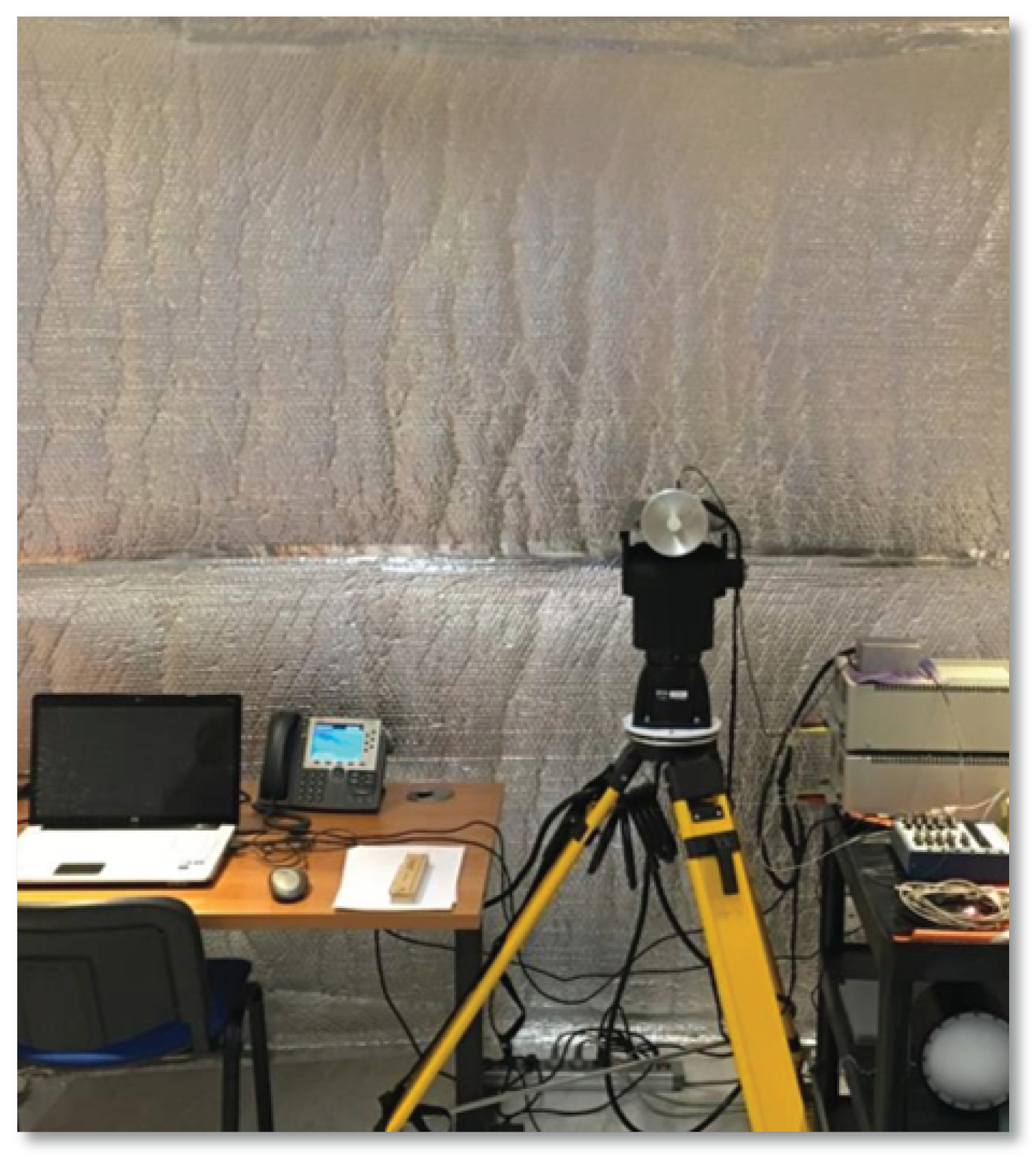
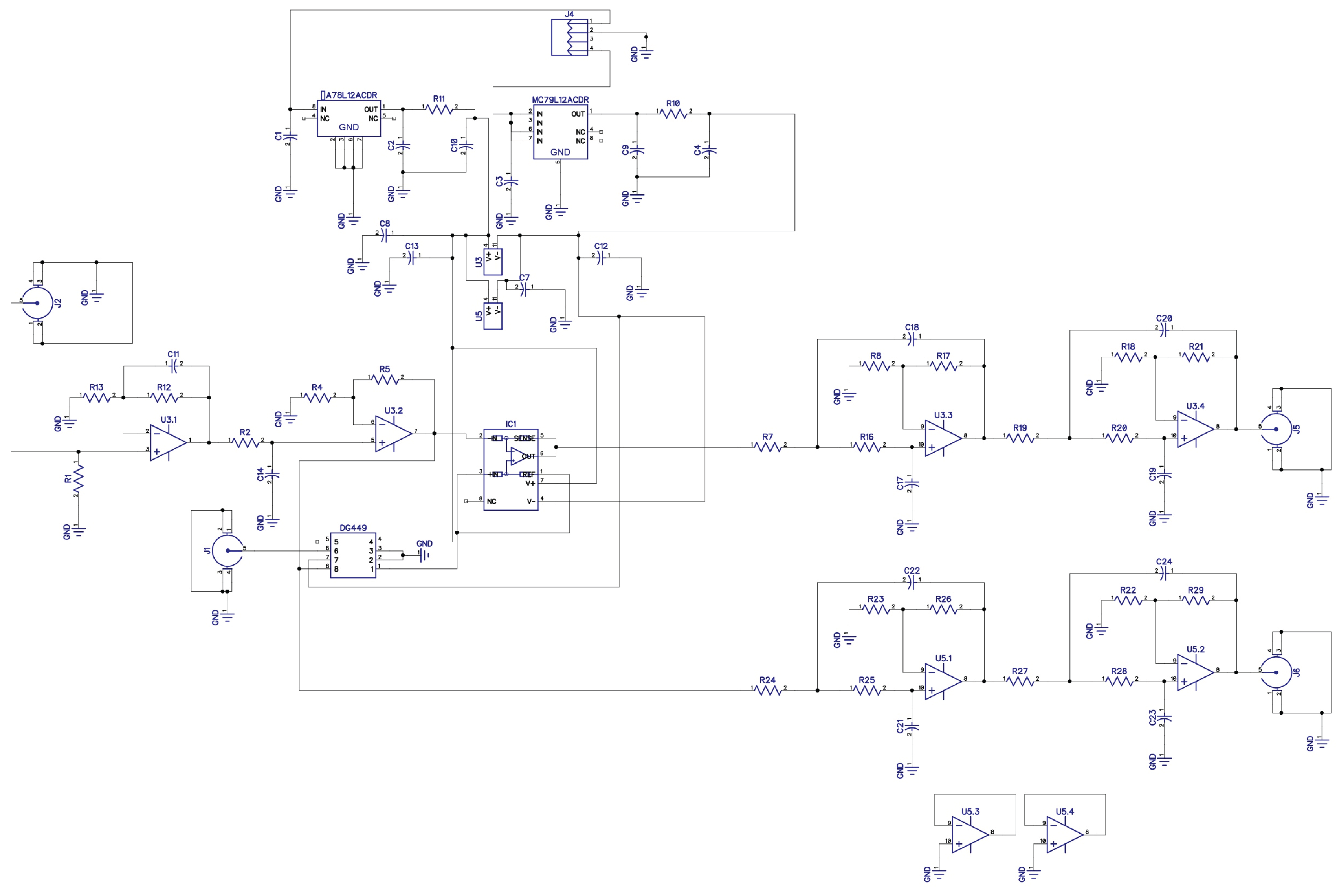
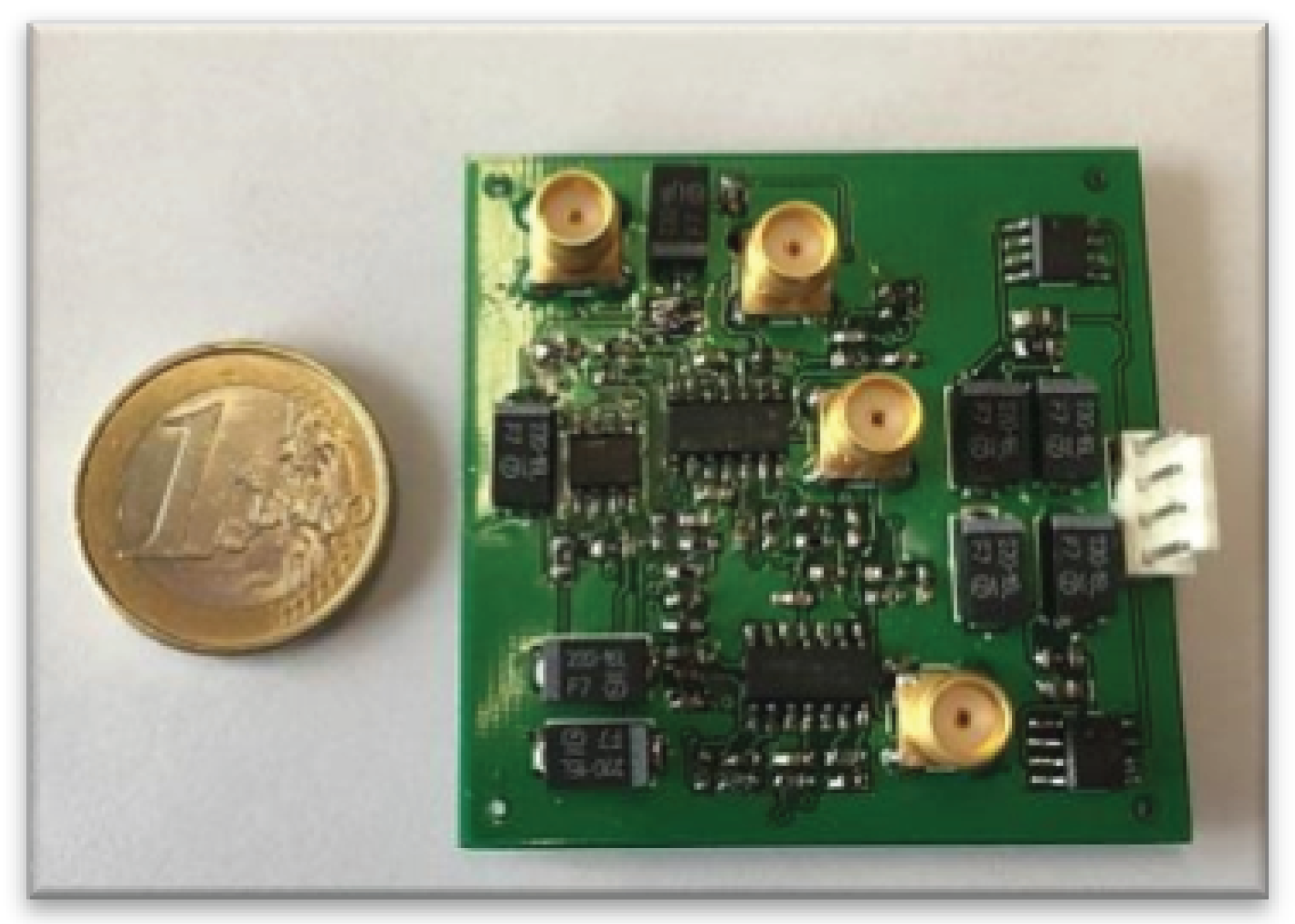
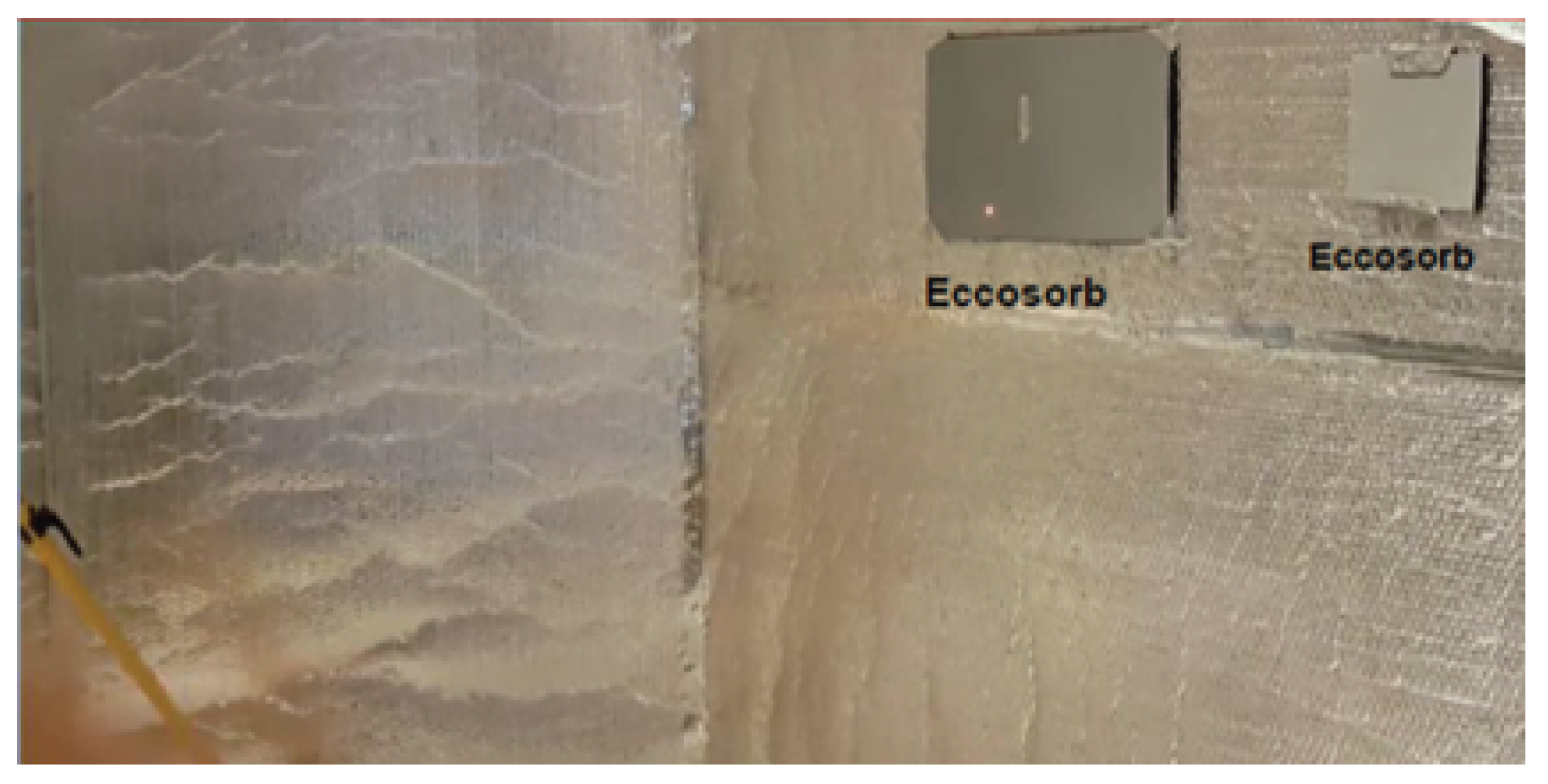
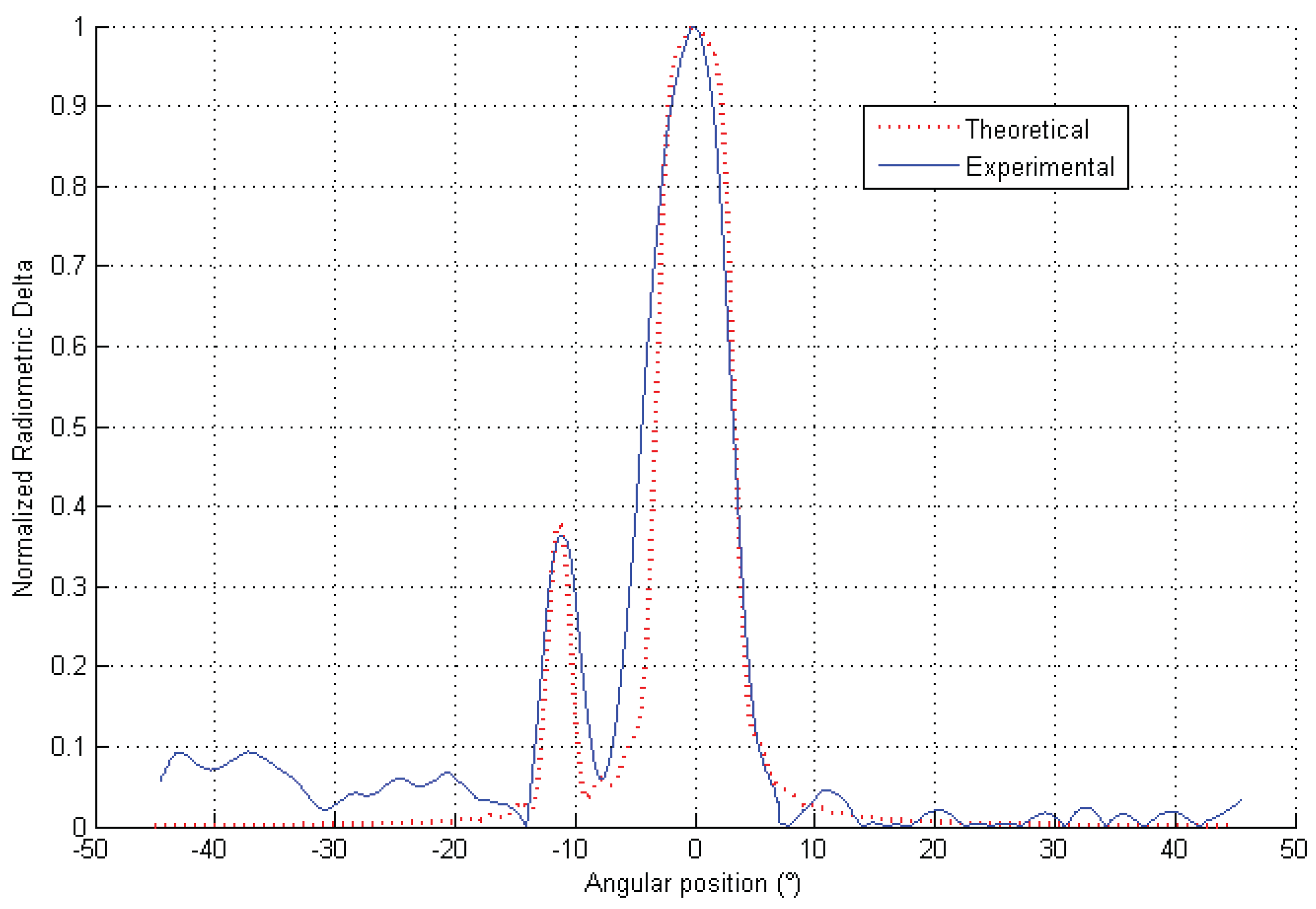
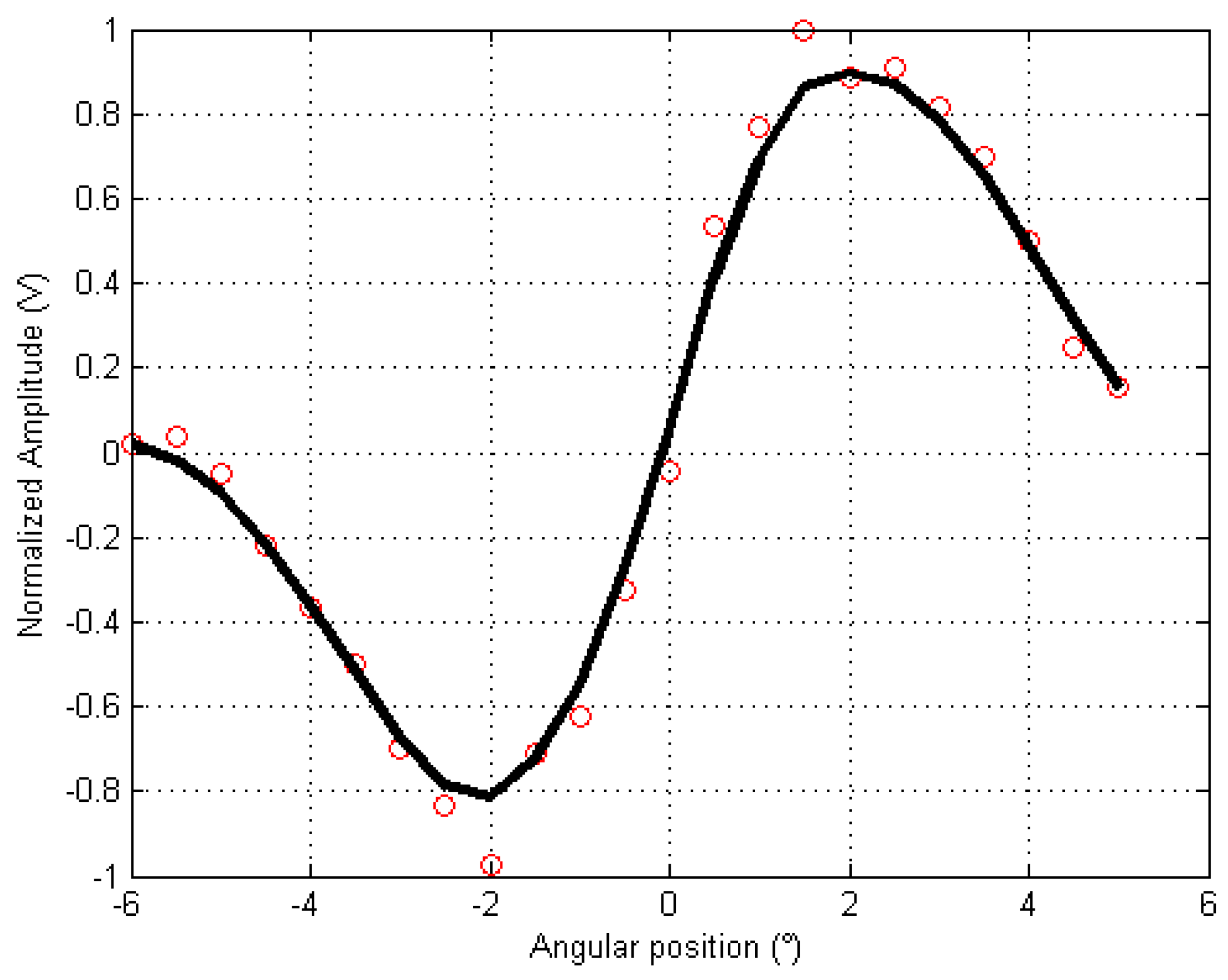
7. Experimental Results
8. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Alimenti, F.; Bonafoni, S.; Leone, S.; Tasselli, G.; Basili, P.; Roselli, L.; Solbach, K. A Low-Cost Microwave Radiometer for the Detection of Fire in Forest Environments. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2632–2643. [Google Scholar] [CrossRef]
- Alimenti, F.; Roselli, L.; Bonafoni, S. Microwave Radiometers for Fire Detection in Trains: Theory and Feasibility Study †. Sensors 2016, 16. [Google Scholar] [CrossRef] [PubMed]
- Jacobs, E.L.; Furxhi, O. Target identification and navigation performance modeling of a passive millimeter wave imager. Appl. Opt. 2010, 49, E94–E105. [Google Scholar] [CrossRef] [PubMed]
- Nanzer, J. Microwave and Millimeter-Wave Remote Sensing for Security Applications; Artech House: Norwood, MA, USA, 2012. [Google Scholar]
- Kapilevich, B.; Litvak, B.; Shulzinger, A.; Einat, M. Portable Passive Millimeter-Wave Sensor for Detecting Concealed Weapons and Explosives Hidden on a Human Body. IEEE Sens. J. 2013, 13, 4224–4228. [Google Scholar] [CrossRef]
- James, D. Radar Homing Guidance for Tactical Missiles; Mac Millan Education Ltd.: London, UK, 1986. [Google Scholar]
- Patton, R.B., Jr.; Wilson, C.L. The VARR Method, a Technique for Determining the Effective Power Patterns of Millimeter-Wave Radiometric Antennas; BRL Report No. 1322; Defense Technical Information Center: Fort Belvoir, VA, USA, 1966. [Google Scholar]
- Balanis, C.A. Antenna Theory: Analysis and Design, 2nd ed.; John Wiley and Sons Inc.: Hoboken, NJ, USA, 1997. [Google Scholar]
- Otoshi, T.Y. Noise Temperature Theory and Applications for Deep Space Communications Antenna Systems; Artech House: Norwood, MA, USA, 2008. [Google Scholar]
- Racette, P.E.; Lang, R.H. Radiometer design analysis based upon measurement uncertainty. Radio Sci. 2005, 4, RS5004. [Google Scholar] [CrossRef]
- Skou, N. Microwave Radiometer Systems: Design and Analysis, 2nd ed.; Artech House: Norwood, MA, USA, 2006. [Google Scholar]
- Stuart, A.; Ord, K. Kendall’s Advanced Theory of Statistics, 6th ed.; Arnold: London, UK, 1998; Volume 1. [Google Scholar]
- Levanon, N. Radar Principles; John Wiley and Sons Inc.: New York, NY, USA, 1988. [Google Scholar]
- Barton, D.K.; Sherman, S.M. Monopulse Radar Theory and Practice, 2nd ed.; Artech House: Norwood, MA, USA, 2011. [Google Scholar]
- Klein, L.A. Millimeter-Wave and Infrared Multisensor Design and Signal Processing; Artech House: Norwood, MA, USA, 1997. [Google Scholar]




© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rossi, M.; Liberati, R.M.; Frasca, M.; Angelini, M. Experimental Implementation of a Passive Millimeter-Wave Fast Sequential Lobing Radiometric Seeker Sensor. Aerospace 2018, 5, 11. https://doi.org/10.3390/aerospace5010011
Rossi M, Liberati RM, Frasca M, Angelini M. Experimental Implementation of a Passive Millimeter-Wave Fast Sequential Lobing Radiometric Seeker Sensor. Aerospace. 2018; 5(1):11. https://doi.org/10.3390/aerospace5010011
Chicago/Turabian StyleRossi, Massimiliano, Riccardo Maria Liberati, Marco Frasca, and Mauro Angelini. 2018. "Experimental Implementation of a Passive Millimeter-Wave Fast Sequential Lobing Radiometric Seeker Sensor" Aerospace 5, no. 1: 11. https://doi.org/10.3390/aerospace5010011
APA StyleRossi, M., Liberati, R. M., Frasca, M., & Angelini, M. (2018). Experimental Implementation of a Passive Millimeter-Wave Fast Sequential Lobing Radiometric Seeker Sensor. Aerospace, 5(1), 11. https://doi.org/10.3390/aerospace5010011