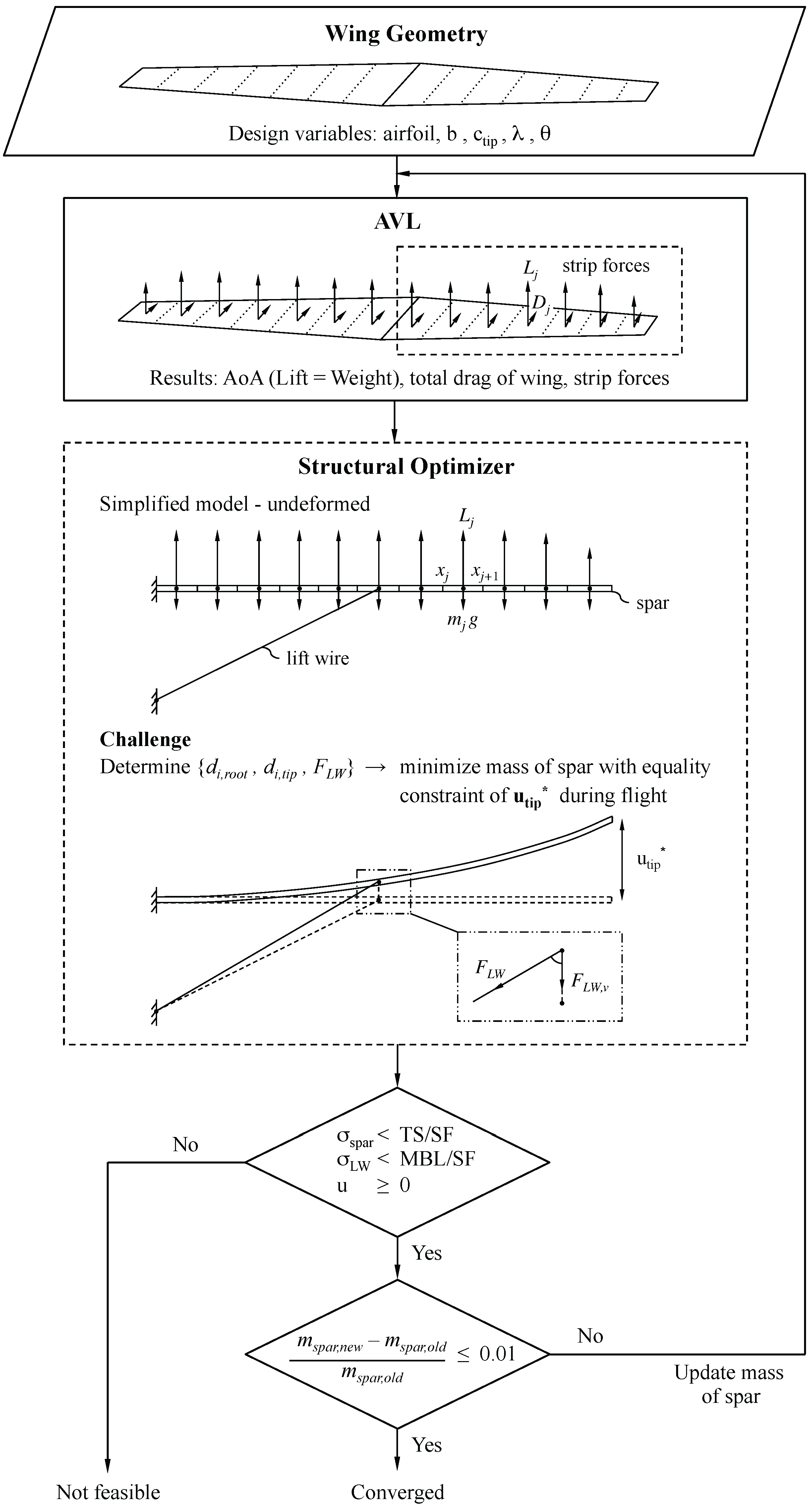
4.3. Structural Optimizer
Knowing the forces acting on the undeformed wing from AVL, it is attempted to design the wing’s mechanical structure with the objective of minimizing the wing’s mass and an equality constraint to obtain a certain design tip deflection
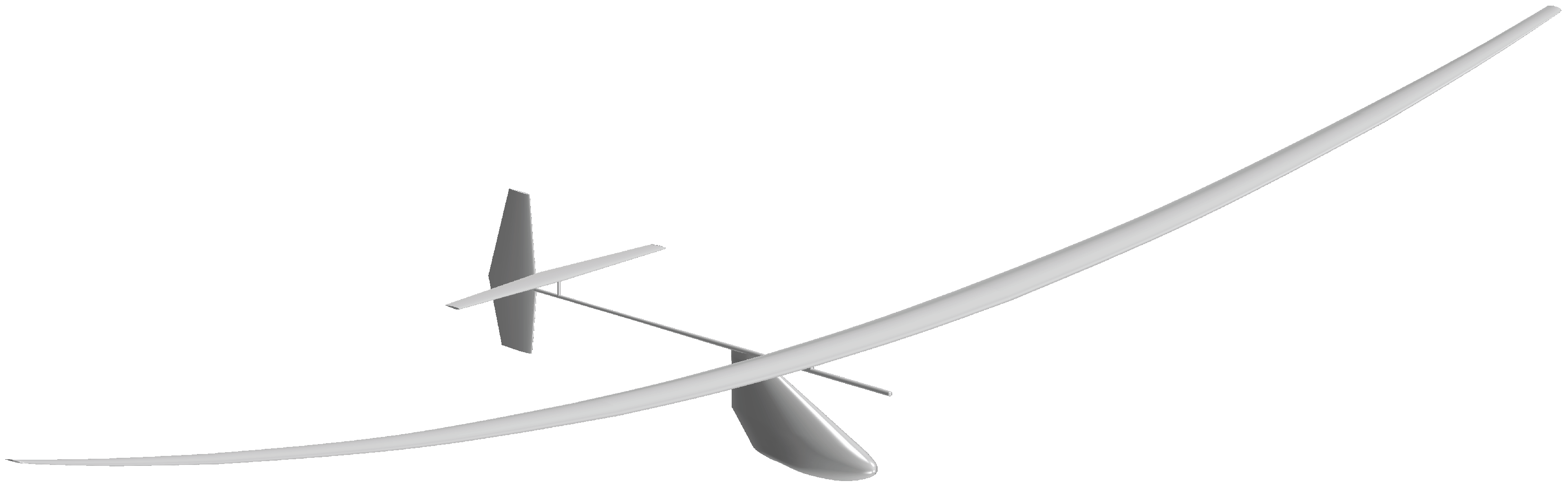
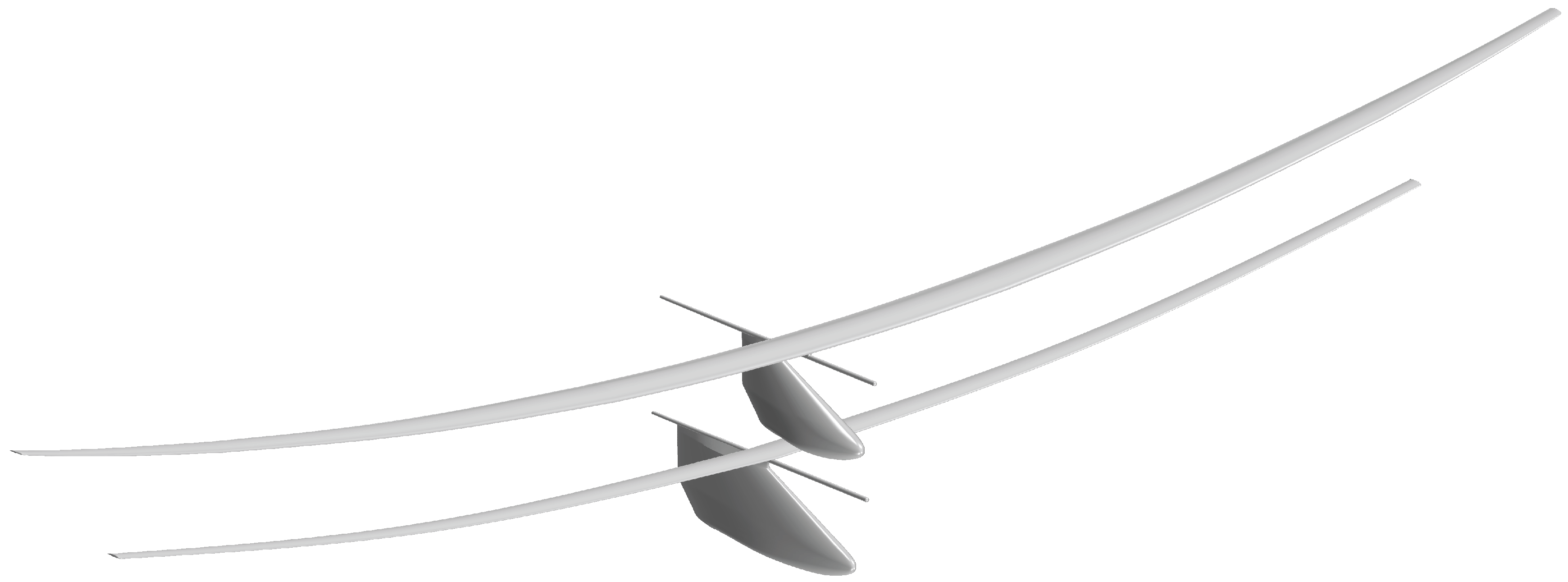
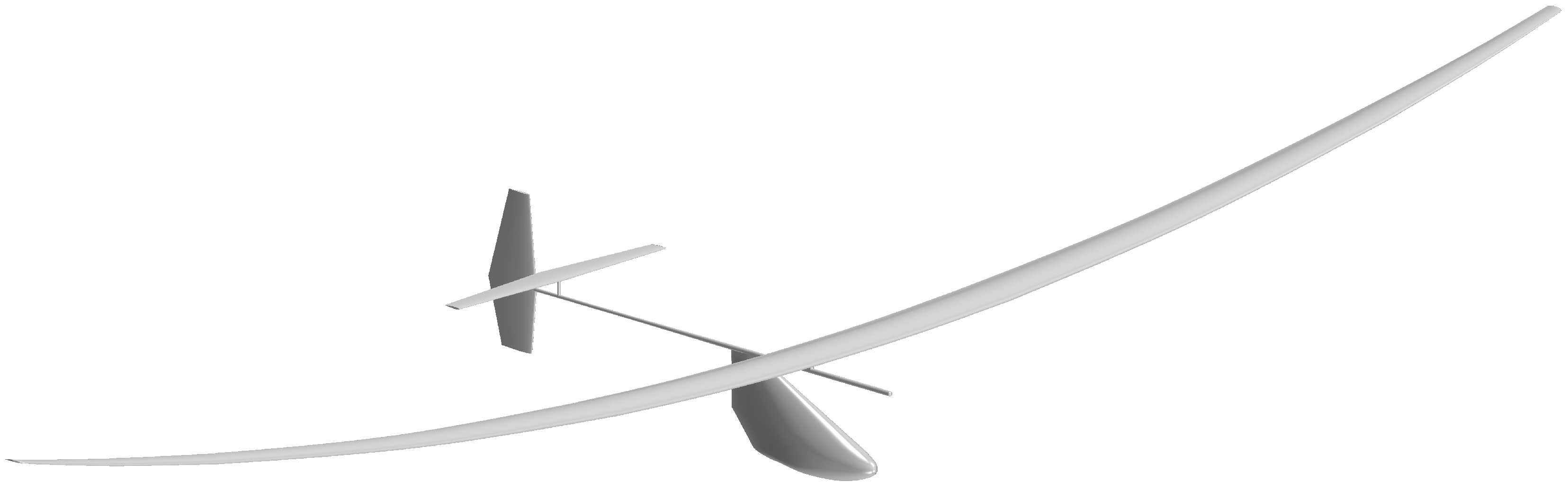
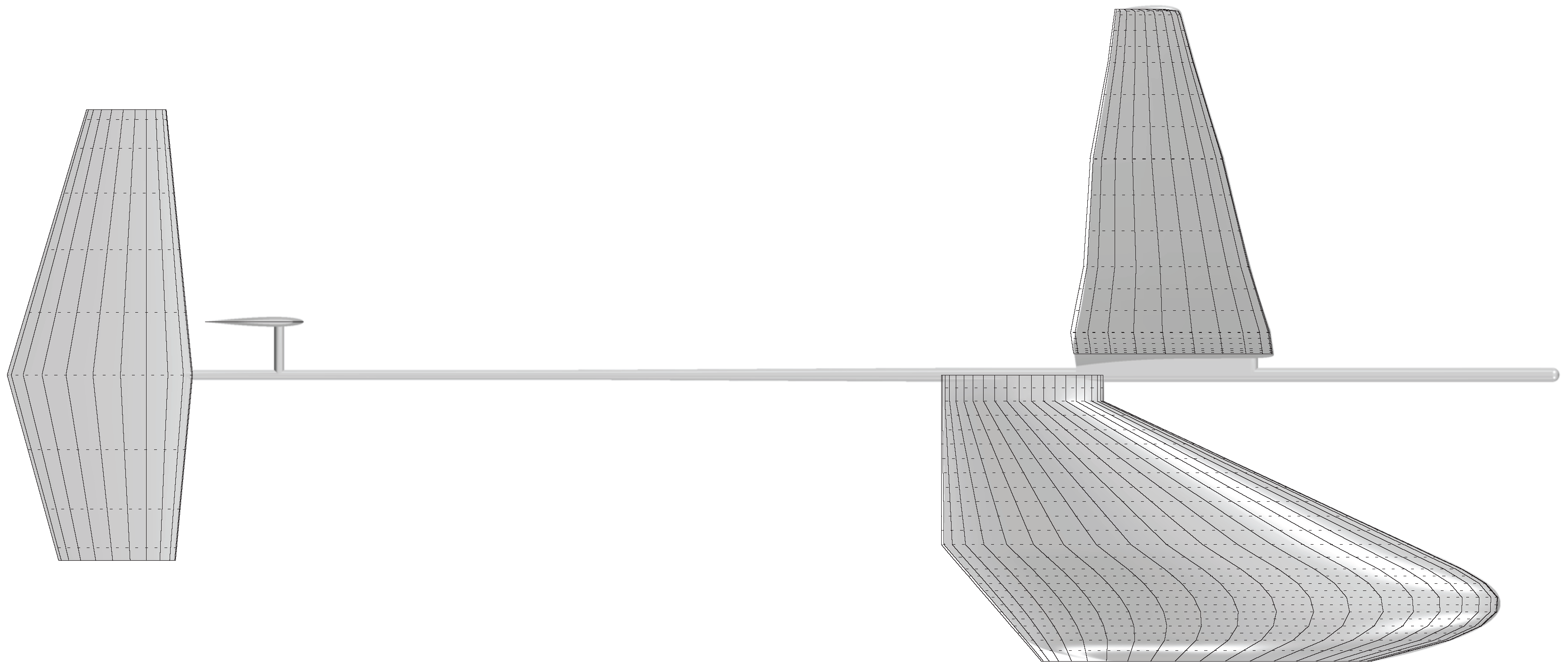
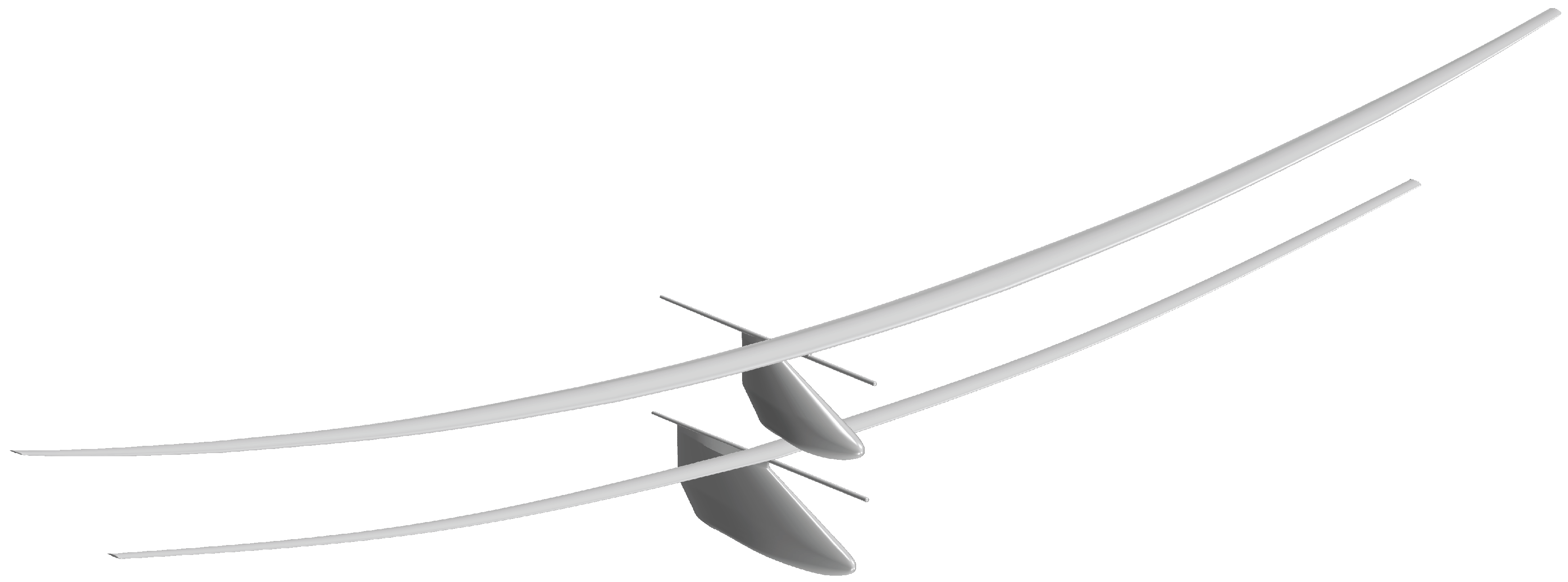
. This design tip deflection is mostly determined from stability requirements. The wing’s mechanical structure is composed of two main parts. The first part is the wing’s internal structure, consisting of a spar and closely-spaced ribs. This internal structure is also the basis for the wing’s outer geometry, which is obtained by wrapping a Mylar sheet around the different ribs of the wing. The second mechanical structure is an external lift wire, which is basically a steel cable connected to the fuselage and the wing of the aircraft (
Figure 11).
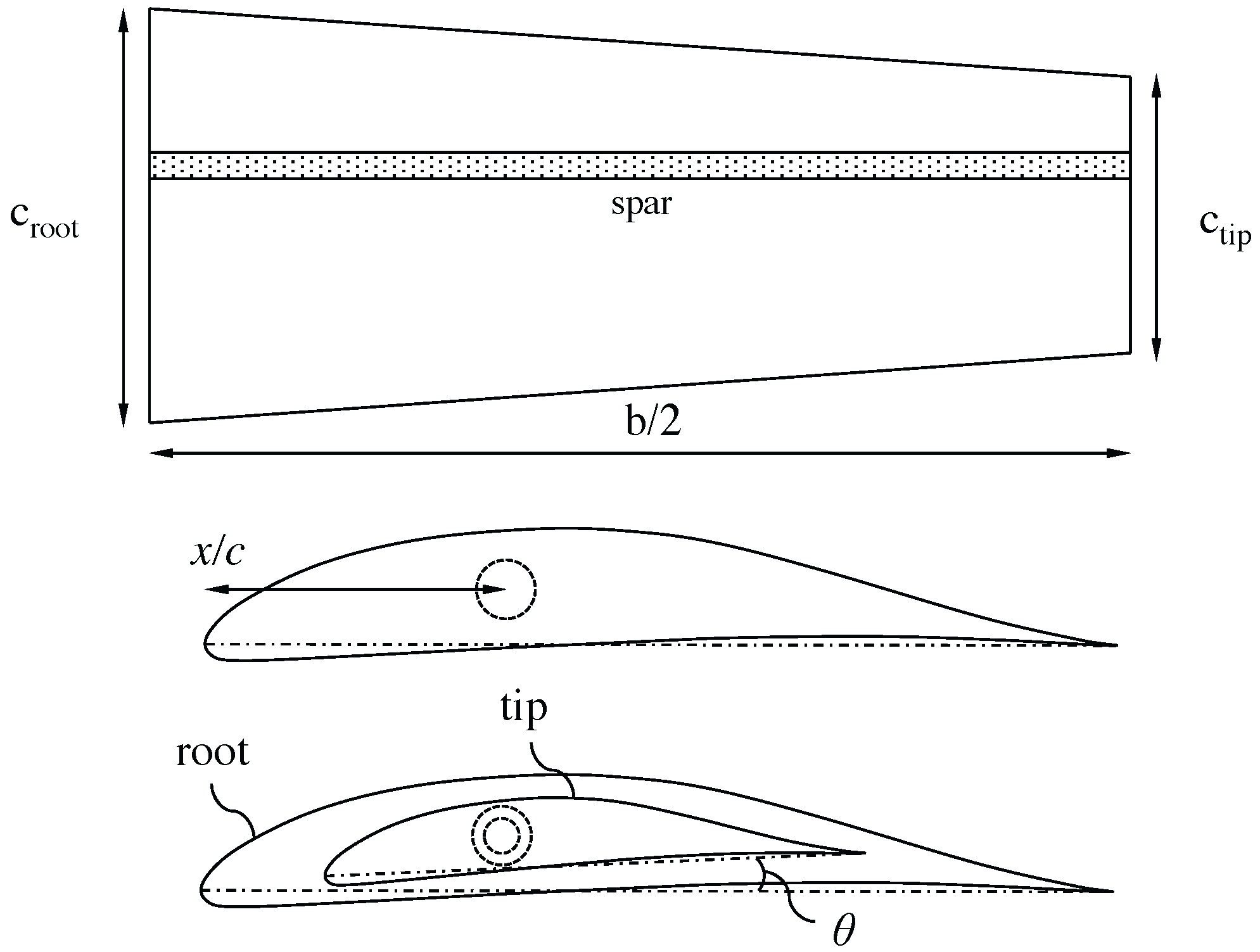
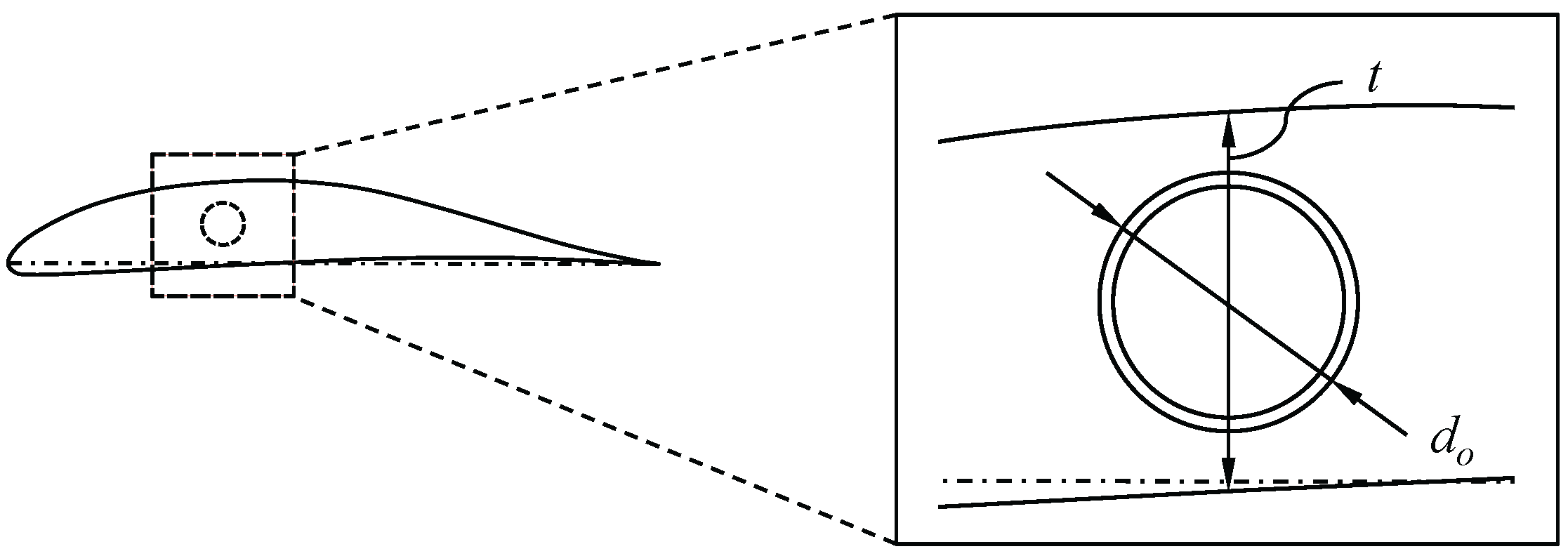
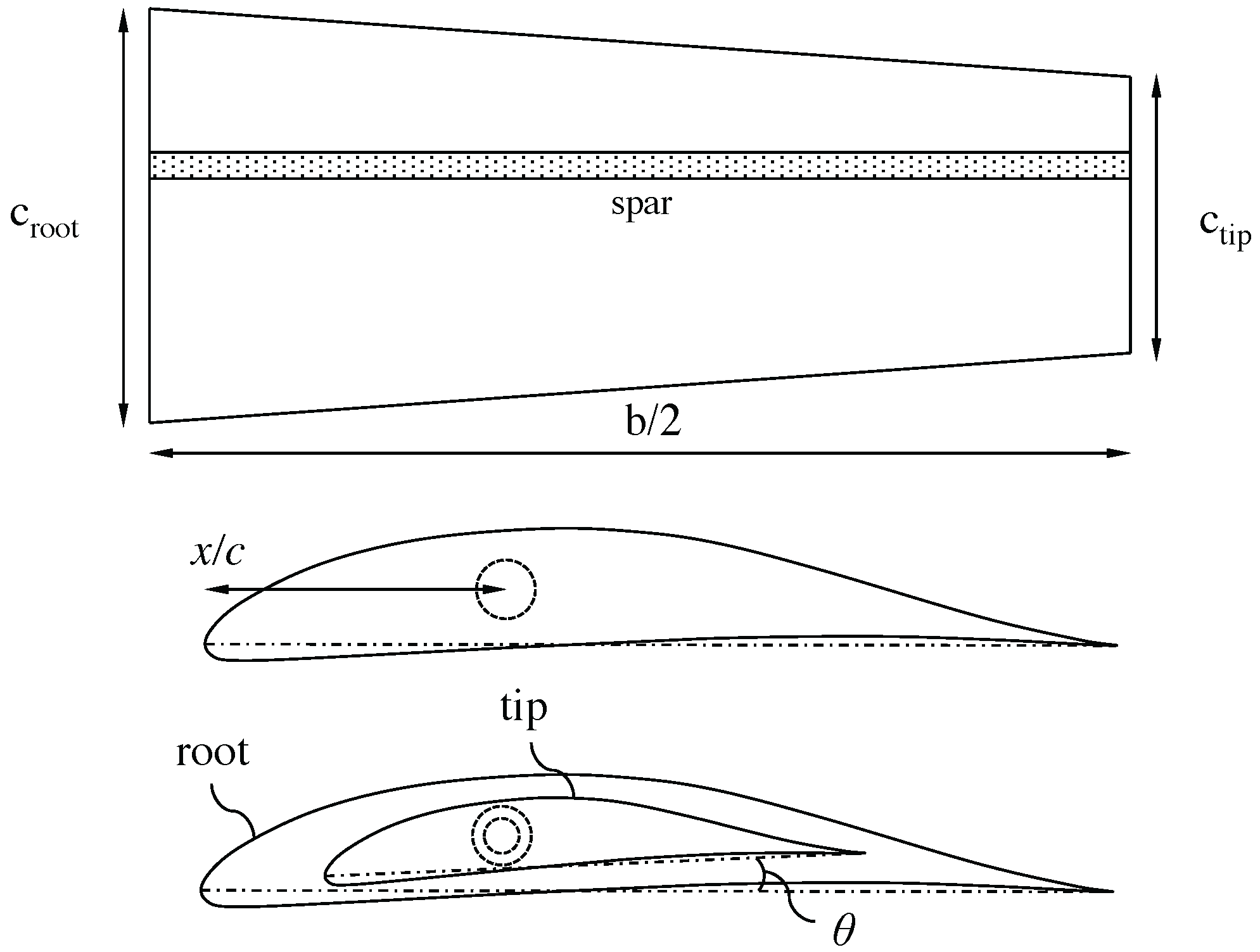
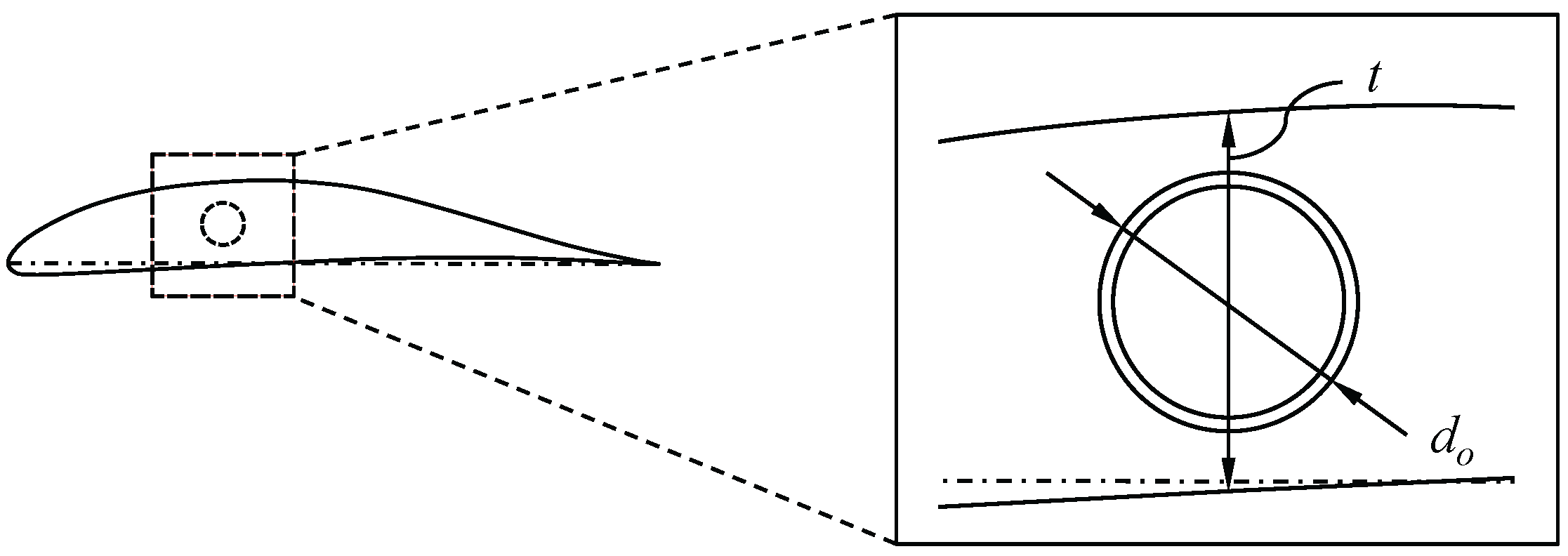
To guarantee that the spar will always fit into the wing, the design process is started by fixing the outer diameters of the spar geometrically. Based on the section’s local thickness
t at the position of the spar (
Figure 15), the outer diameters at the root and tip of the wing are taken as respectively 65% and 80% of the corresponding thickness. In addition, when the diameter at the root is found to be smaller than at the tip, e.g., when the wing is not tapered, both fractions are set to 65%. As such, the outer diameter at the root is always larger or equal to the outer diameter at the tip. It is now assumed that the outer diameters vary linearly from root to tip, which agrees with the linear variation of the chord lengths. At this point, the inner diameters of the spar are still unknown.
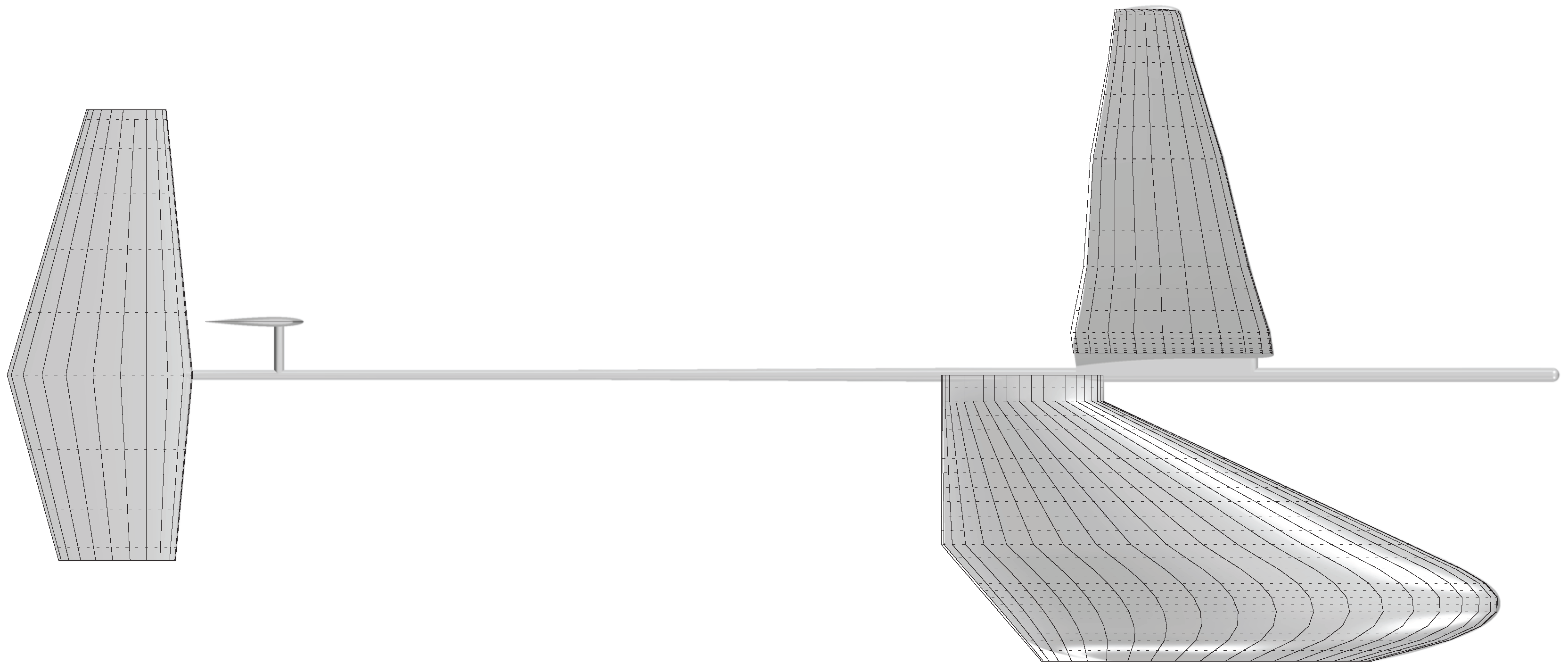
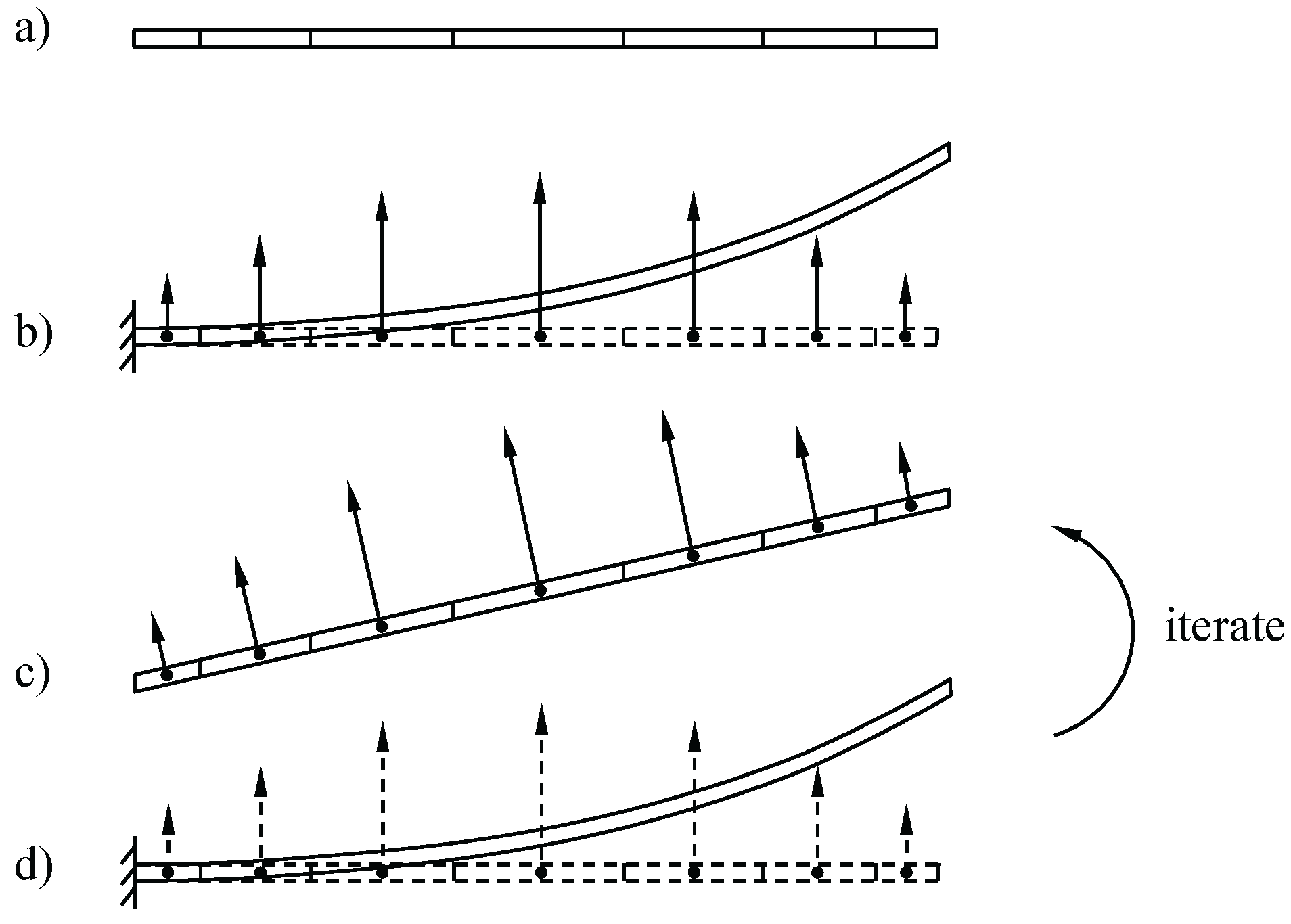
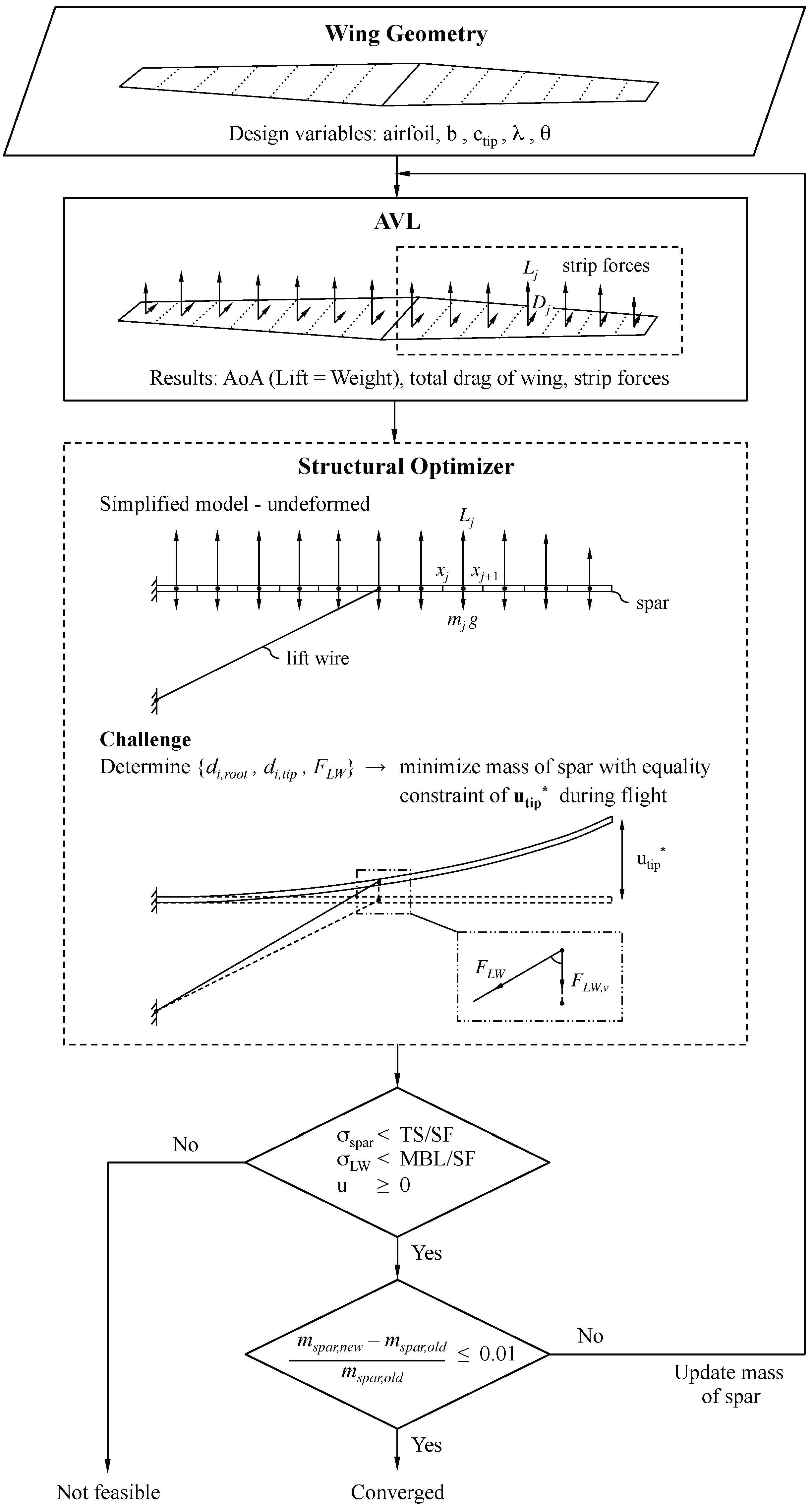
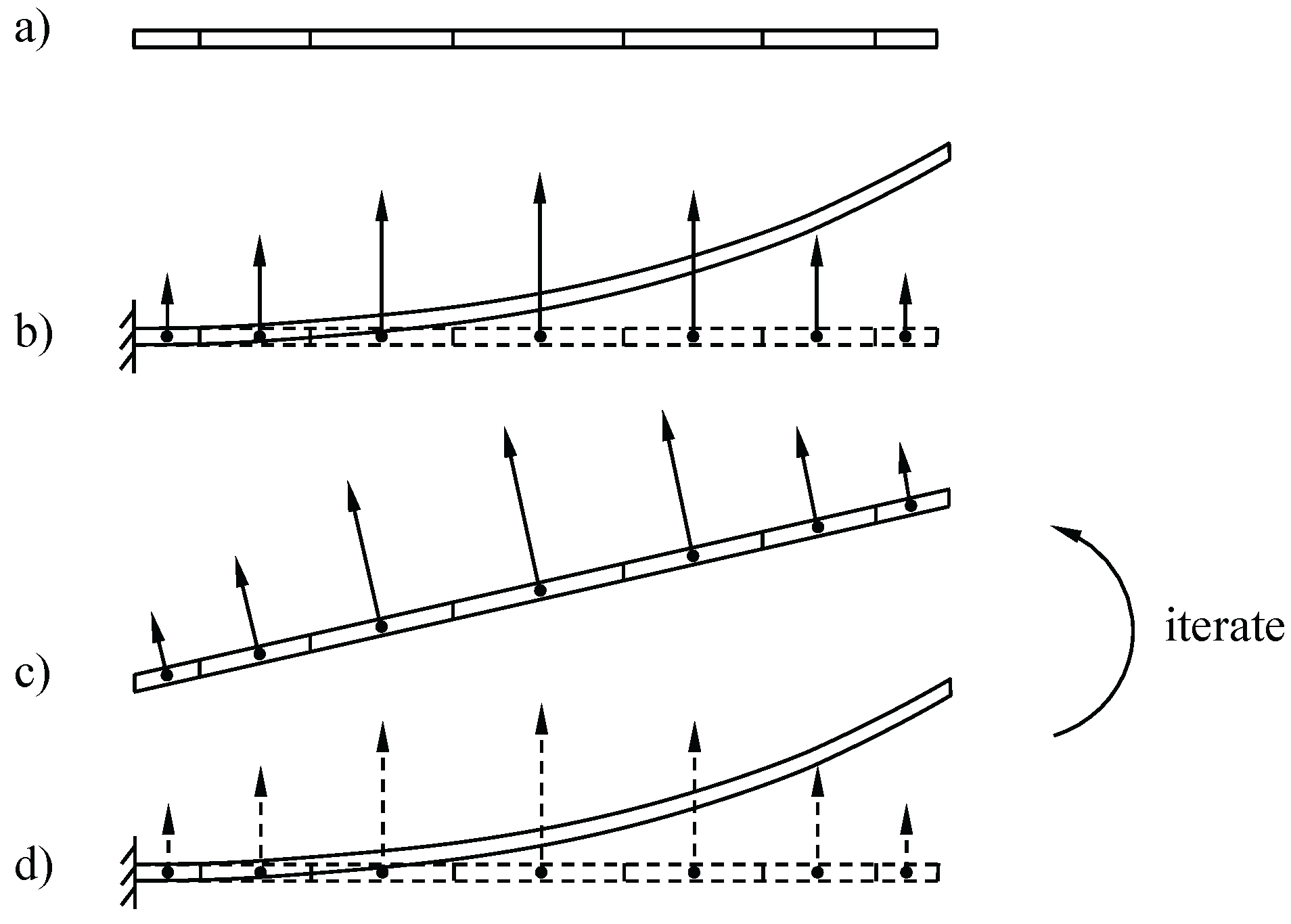
To determine the wing’s deflection during flight, the wing is represented by its spar and modeled as a cantilevered beam (
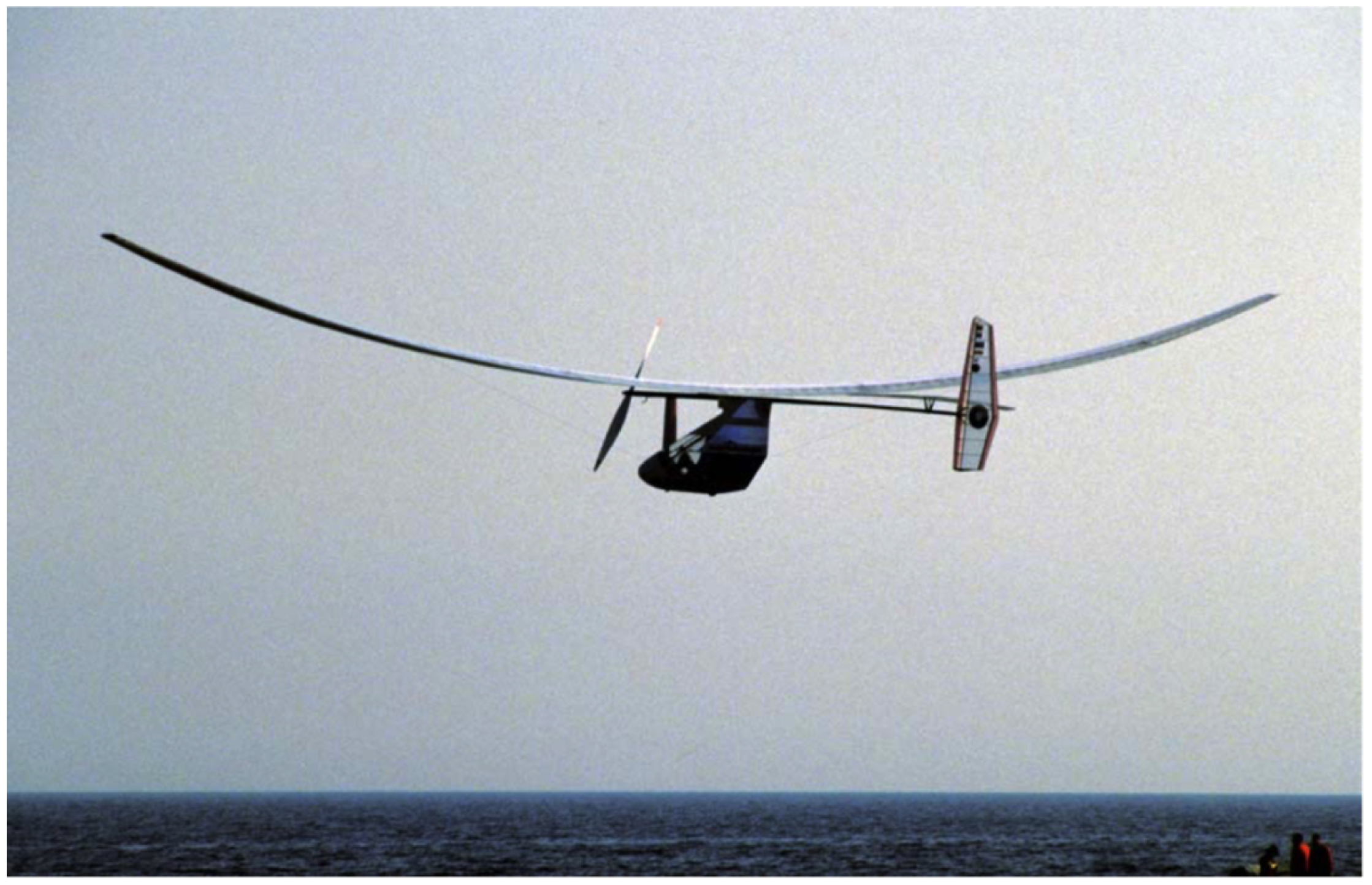
Figure 13). The fixed and free end correspond to respectively the root and tip of the wing. Since the lift-to-drag ratio of the wing is usually very high for HPAs, being in the order of 45 for the Daedalus, only the vertical deformation due to the lift forces
will be calculated here. When the wing deforms, the lift wire will exert an additional force
onto the wing. However, this force can be adjusted by making the lift wire somewhat more loose or tight, and as such, this force is considered as an additional design variable.
The structural challenge now consists of finding a set of inner diameters of the wing’s spar at root and tip (, ) together with the force of the lift wire , such that the wing experiences a certain design tip deflection during flight. Sequential Quadratic Programming (SQP) has been used for this optimization, and the optimizer runs until the relative change in the spar’s mass is less than 1%. As for the outer diameters of the spar, the inner diameters are assumed to vary linearly from root to tip. Further, it is attempted to minimize the mass of the wing’s spar while maintaining the design tip deflection.
To calculate the wing’s deflection for a certain set of inner diameters and force of the lift wire, the Euler–Bernoulli beam theory is applied and solved numerically using finite differencing. The equations are:
in which
and where
V represents the shear force,
M the bending moment,
θ the deflection angle and
u the deflection. The lift forces
follow from the strip forces determined by AVL, and the masses
follow from the inner and outer diameters of the spar and its material density. The force of the lift wire is included as follows:
in which the lift wire is assumed to be connected underneath the fuselage and halfway between the root and tip of the wing. For the spar (a hollow tube), the second moment of area
I is given by:
and by specifying the Young’s modulus
E, it is possible to determine the bending stiffness
in every discrete point
. Finally, the boundary conditions for the fixed and free end of the cantilevered beam can be expressed as:
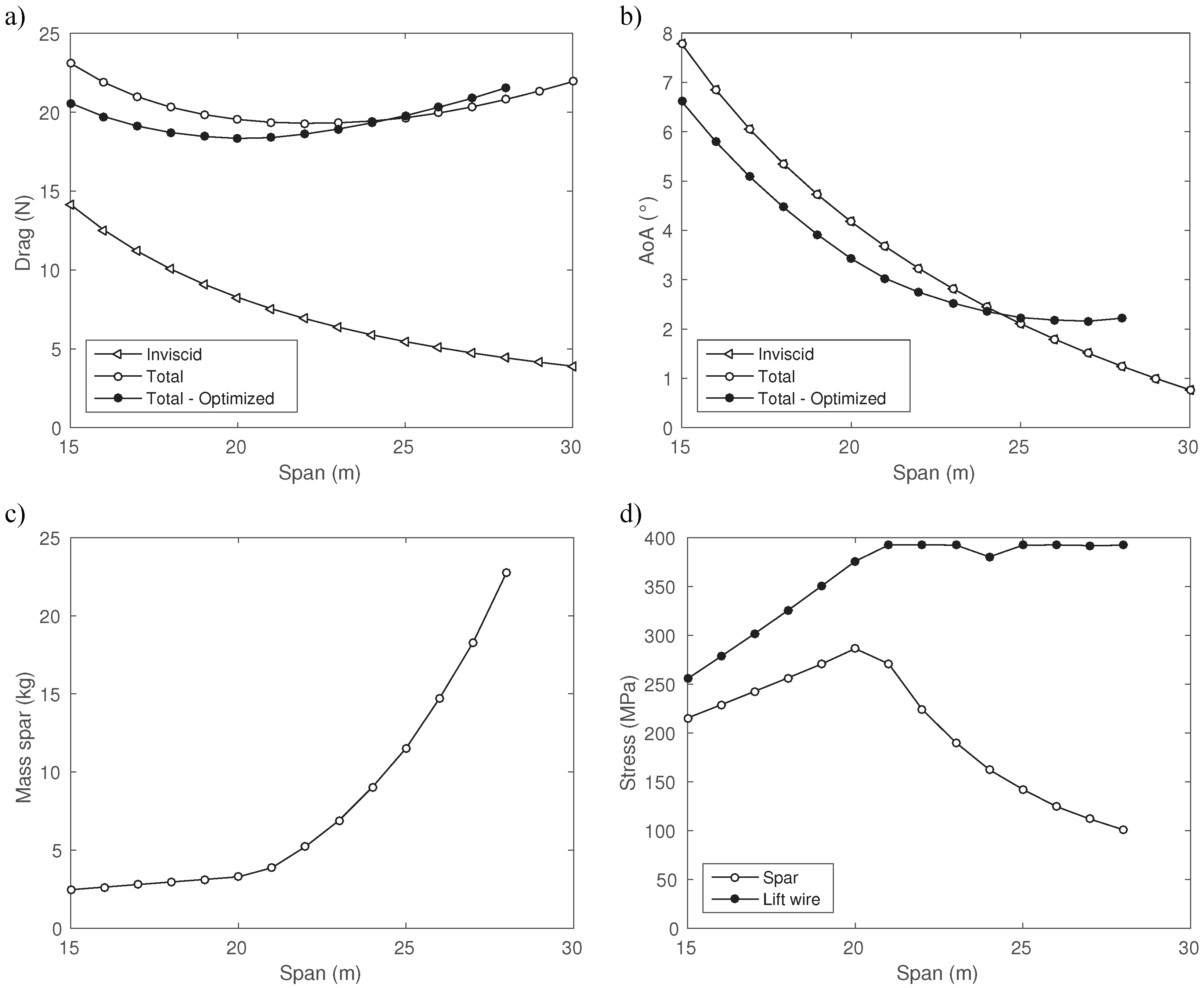
For each set of inner diameters and force of the lift wire considered during the structural optimization, a number of important conditions must be verified. First, the stresses occurring within the wing’s spar and lift wire should be below a certain maximal limit to avoid structural failure. For the spar, the maximal bending stress in every discrete point
is given by:
The shear stress will not be taken into account here, as its contribution was found to be negligible. For the lift wire, the tension is given by:
in which
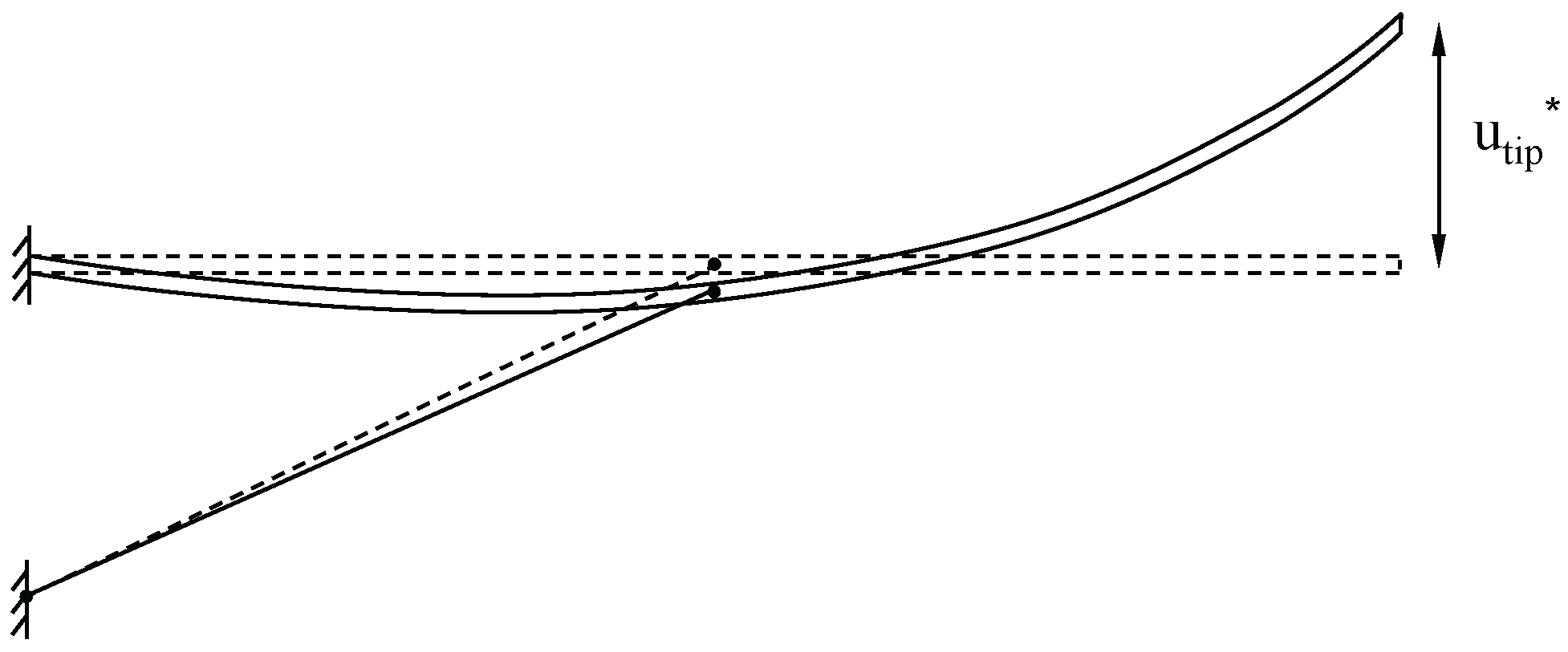
is the cross-sectional area of the lift wire. The material limits are indicated by the Tensile Strength (TS) in the case of the spar and by the Minimum Breaking Load (MBL) in the case of the lift wire. For both structures, an appropriate Safety Factor (SF) will be chosen. As a second condition, the deflection of the wing
u may nowhere be negative. This second condition might need some further clarification. It is possible that the force exerted by the lift wire is so strong that the spar will deform negatively (downwards direction) near the root, but still achieves the desired tip deflection due to extreme bending towards the tip of the wing. Such a case is illustrated in
Figure 16 and will not be considered as valid.
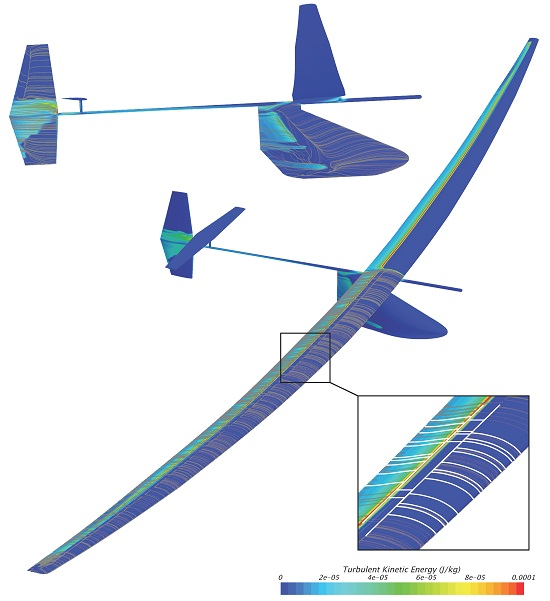
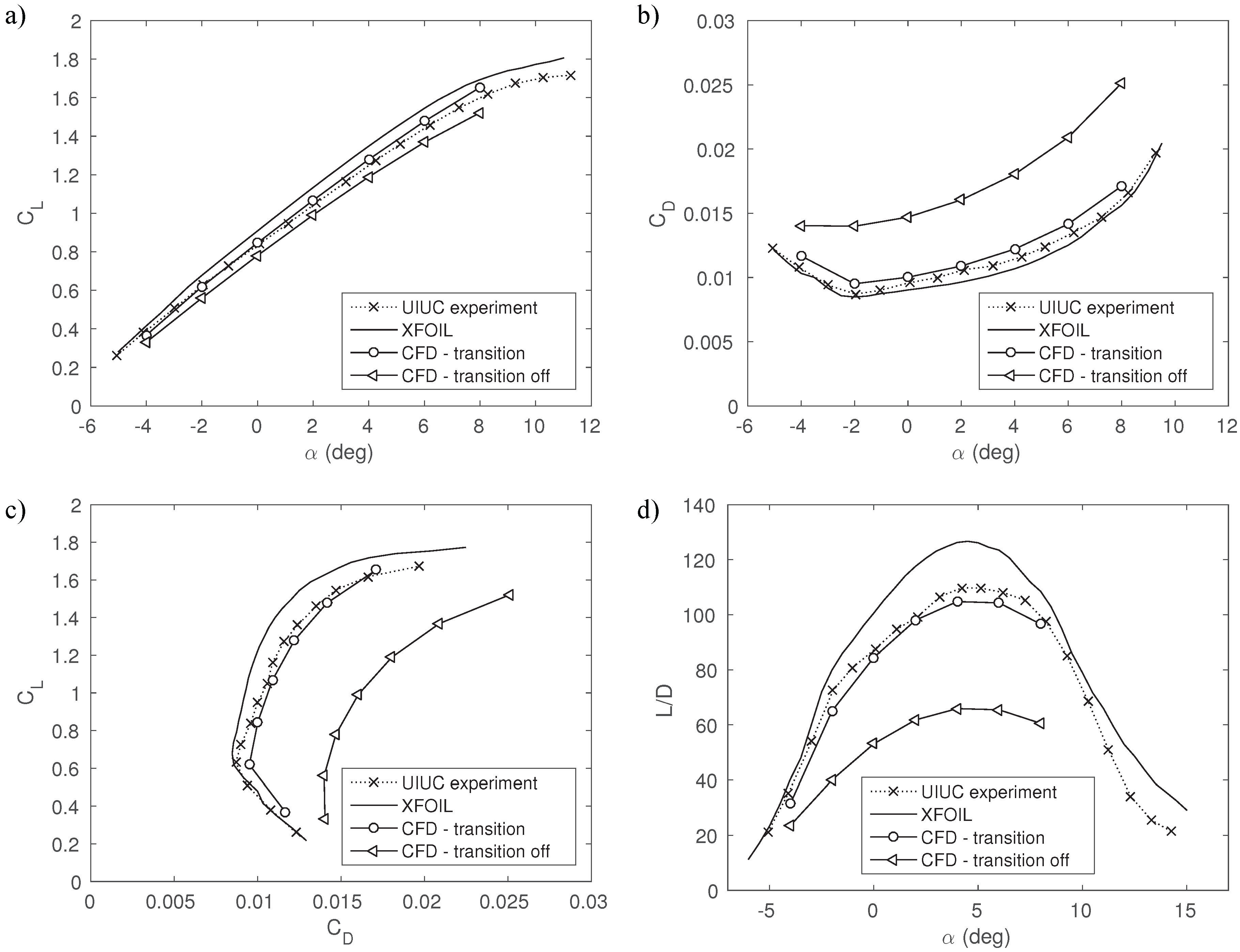
We remark that the final deformation of the wing is determined here using the forces acting on the undeformed wing. This approach is referred to as one-way aeroelastic. In order for the simulations to be FSI simulations, the deformed wing would have to be simulated again in AVL, and using the newly-determined strip forces, the deflection of the wing would have to be updated. This is repeated until the change between two consecutive iterations is found small enough. However, it will be shown in
Section 5 that the one-way aeroelastic approach yields sufficiently accurate results compared to FSI, such that no coupling is required in the structural optimization.
To summarize, the structural optimization consists of finding a set of inner diameters and the force of the lift wire, such that the wing experiences a certain design tip deflection during flight. For the set to be feasible, the stresses occurring within the spar and lift wire should be limited, and the deflection should nowhere be negative. Further, it is attempted to find a feasible set that in addition minimizes the mass of the spar. This set is referred to as the optimal set.
4.5. Cases
As mentioned in the Introduction, it is intended to investigate if powering an HPA by two pilots offers some advantages. To do so, a separate wing will be designed for two cases; a single-pilot and a dual-pilot configuration.
Table 3 contains the lower and upper boundary of every geometrical design variable together with its step size, used to generate the large set of different wing geometries. The relative position
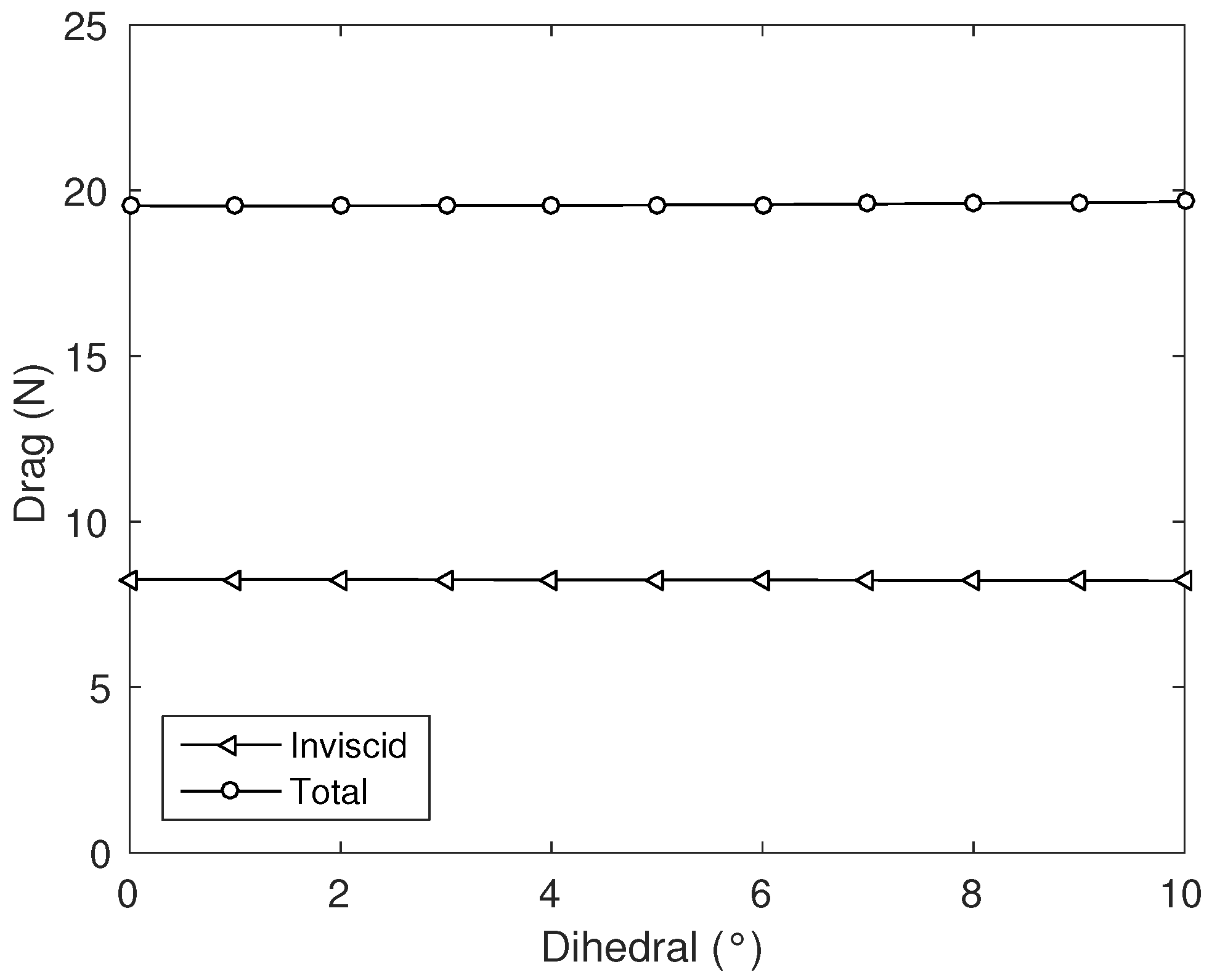
of the spar’s center has been set to 0.33, and the desired tip deflection during flight is expressed via the dihedral angle Γ,
and as such, depends on the span
b of the wing. The desired dihedral angle has been set to six degrees, which closely corresponds with the value of the Daedalus. Further, the twist angle was set to zero degrees, and 12 different airfoil types were investigated, in which each airfoil is specifically designed for HPAs or low-Reynolds number flows. The two pilots included in the optimization are not professional athletes, but rather two young engineering students whose masses are given in
Table 4. The table further contains the structural properties of the spar and lift wire, in which the spar is constructed from high modulus carbon fiber with a minimal wall thickness of 0.8 mm and where the lift wire is a stainless steel wire rope. For both structures, the Safety Factor (SF) was set to four. Finally, note that a different diameter of the lift wire is used in the dual-pilot configuration.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}