
Multi-Objective Optimization Method for Multi-Module Micro–Nano Satellite Components Assignment and Layout

Abstract
1. Introduction
2. 3D-RMSAO Problem Statement and Analysis
3. Mathematical Formulation and Constraint Modeling for 3D-RMSAO
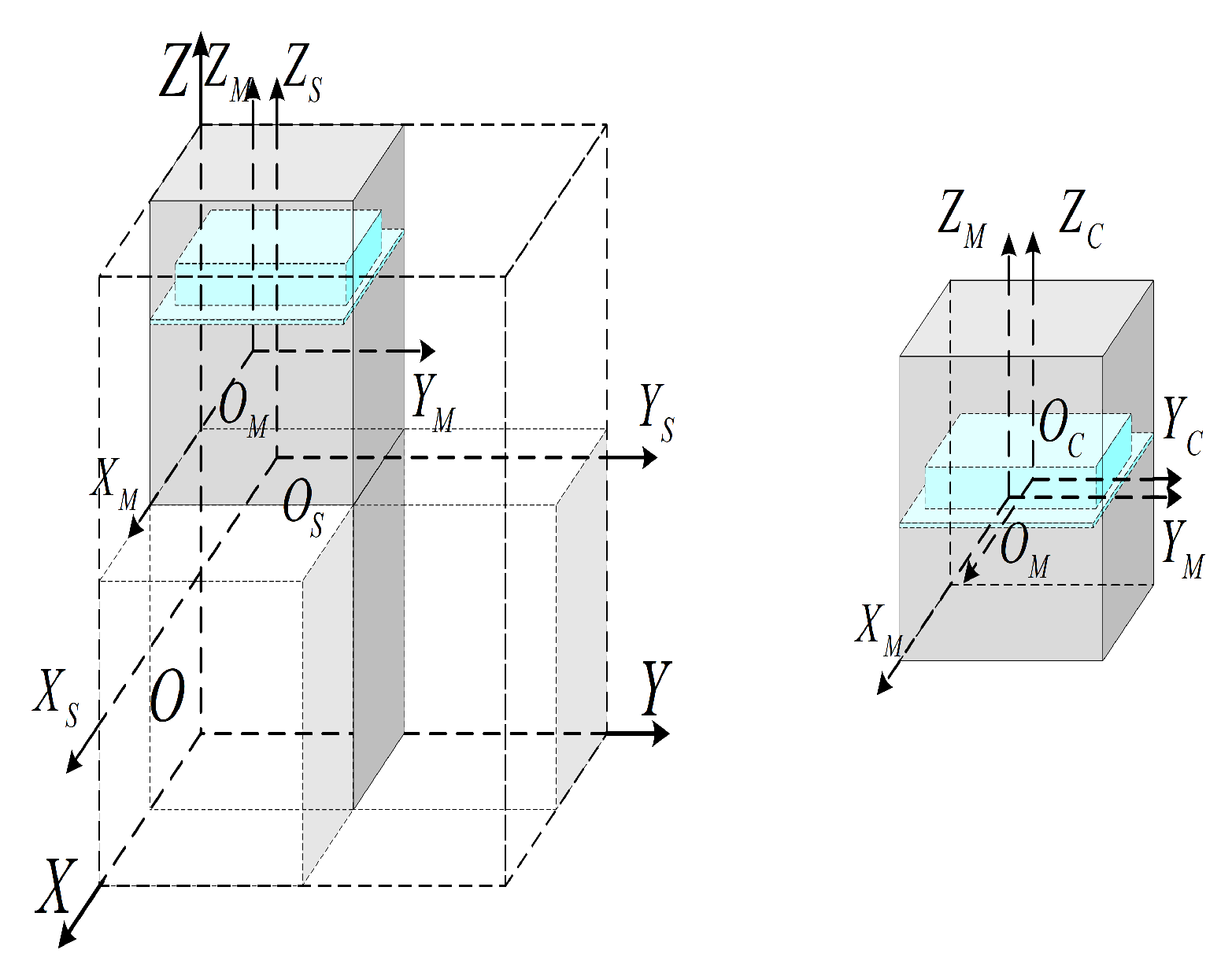
3.1. Coordinate System
3.2. Optimal Variables
3.3. Assembly Constraints of Components and Modules
3.4. Objective Functions
3.5. Optimization Model
4. Solution Approach
4.1. TS-Based Component Assignment Method
4.2. MODE-Based Component Layout Method
5. Case Study
5.1. Case Description
5.2. Simulation Parameter Setting
5.3. Constraint Setting

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Constraints | Description | Permitted Value |
|---|---|---|
| Constraints of components | 0 | |
| 1 | ||
| see Table 4 | ||
| Constraints of modules |
| No. | Component | Layout Requirements |
|---|---|---|
| 9 | Camera | Located at the bottom surface of module u2, u3, u5 or u6 |
| 10 | Star sensor | Located in the top surface of the u1, u3, u4 or u6 module |
| 12 | Sun sensor | Located in the top surface of the u1, u3, u4 or u6 module |
5.4. Results and Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| 3D-AODP | three-dimensional assembly optimization design problem |
| 3D-RMSAO | three-dimensional component assignment and layout optimization |
| MD | mass difference |
| MOI | moment of inertia |
| POI | product of inertia |
| TS | tabu search |
| MODE | multi-objective differential evolutionary |
References
- Junichiro, K.; Masahiro, F.; Shinya, F.; Yuji, S.; Toshinori, K.; Kazuya, Y.; Shingo, N.; Kohei, T.; Saki, K.; Kokubo, H. On the low-cost asynchronous one-way range measurement method and the device for micro to nano deep space probes. Acta Astronaut. 2024, 214, 457–465. [Google Scholar]
- Somov, Y.; Butyrin, S.; Somov, S. Autonomous Control of a Small Spacecraft in Initial Orientation Modes. Ifac-Papersonline 2021, 54, 345–350. [Google Scholar] [CrossRef]
- Li, X.; Li, X.; Tang, L.; Yang, Z.; Yang, L. Development of a compact solar array drive assembly based on ultrasonic motor for deep space micro-nano satellites. Acta Astronaut. 2025, 228, 865–874. [Google Scholar]
- Wen, Y.; Xiao, Q.C.; Yong, Z.; Michel, V.T. A Fractionated Spacecraft System Assessment Tool Based on Lifecycle Simulation Under Uncertainty. Chin. J. Aeronaut. 2012, 25, 71–82. [Google Scholar]
- Ran, D.; Sheng, T.; Cao, L.; Chen, X.; Zhao, Y. Attitude control system design and on-orbit performance analysis of nano-satellite—“Tian Tuo 1”. Chin. J. Aeronaut. 2014, 27, 593–601. [Google Scholar]
- Yu, X.; Xian, C.; Zhi, L.; Wei, Z.; Wen, Y.; Zhong, Z. Mixed integer programming modeling for the satellite three-dimensional component assignment and layout optimization problem. Chin. J. Aeronaut. 2025, 294, 103415. [Google Scholar]
- Kortmann, M.; Schervan, A.; Schmidt, H.; Steffen, R.; Kreisel, J. Building Block-based “iBOSS” Approach: Fully Modular Systems with Standard Interface to Enhance Future Satellites. In Proceedings of the 66nd International Astronautical Congress, Jerusalem, Israel, 12–16 October 2015. [Google Scholar]
- Schervan, A.; Kortmann, M.; Schröder, K.; Kreisel, J. iBOSS Modular Plug & Play - Standardized Building Block Solutions for Future Space Systems Enhancing Capabilities and Flexibility, Design, Architecture and Operations. In Proceedings of the 68th International Astronautical Congress (IAC 2017), Adelaide, Australia, 25–29 September 2017; pp. 9375–9385. [Google Scholar]
- Schervan, A.; Richert, B.; Zimmermann, J.; Zeis, C.; Häming, M.; Dück, A.; Schröder, K. Assembly and Qualification of a Modular Satellite Structure. In Proceedings of the International Astronautical Congress, Bremen, Germany, 1–5 October 2018; pp. 1–8. [Google Scholar]
- Chong, Z.; Zhi, X.; Hong, T. Multi-module satellite component assignment and layout optimization. Appl. Soft Comput. 2019, 75, 148–161. [Google Scholar]
- Teng, H.F.; Sun, S.L.; Liu, D.Q.; Li, Y.Z. Layout optimization for the objects located within a rotating vessel—A three-dimensional packing problem with behavioral constraints. Comput. Oper. Res. 2001, 28, 521–535. [Google Scholar]
- Juliette, G.; Mathieu, B.; Arnault, T.; Romain, W.; Nouredine, M.; El-Ghazali, T. Hidden-variables genetic algorithm for variable-size design space optimal layout problems with application to aerospace vehicles. Eng. Appl. Artif. Intell. 2023, 121, 105941. [Google Scholar]
- Sun, G.; Teng, F. Optimal layout design of a satellite module. Eng. Optim. 2003, 35, 513–529. [Google Scholar] [CrossRef]
- Zhang, B. Particle swarm optimization based on pyramid model for satellite module layout. Chin. J. Mech. Eng. 2005, 4, 530. [Google Scholar] [CrossRef]
- Lau, W.; Chan, M.; Tsui, T.; Ho, S.; Choy, L. An AI approach for optimizing multi-pallet loading operations. Expert Syst. Appl. 2009, 36, 4296–4312. [Google Scholar] [CrossRef]
- Grignon, M.; Fadel, M. A GA Based Configuration Design Optimization Method. J. Mech. Des. 2004, 126, 6–15. [Google Scholar] [CrossRef]
- Fei, T.; Chen, Y.; Zeng, W. A Dual-System Variable-Grain Cooperative Coevolutionary Algorithm: Satellite-Module Layout Design. IEEE Trans. Evol. Comput. 2010, 14, 438–455. [Google Scholar]
- Xu, Y.C.; Xiao, R.B.; Amos, M. A novel genetic algorithm for the layout optimization problem. In Proceedings of the 2007 IEEE Congress on Evolutionary Computation, Singapore, 25–28 September 2007; Volume 14, pp. 3938–3943. [Google Scholar]
- Ye, H.; Liang, H.; Yu, T.; Wang, J.; Guo, H. A bi-population clan-based genetic algorithm for heat pipe-constrained component layout optimization. Expert Syst. Appl. 2023, 213, 118881. [Google Scholar]
- Zhi, X.; Chong, Z.; Hong, T. Assignment and layout integration optimization for simplified satellite re-entry module component layout. Inst. Mech. Eng. Part J. Aerosp. Eng. 2017, 233, 095441001770422. [Google Scholar]
- Chen, X.; Liu, S.; Sheng, T.; Zhao, Y.; Yao, W. The satellite layout optimization design approach for minimizing the residual magnetic flux density of micro-and nano-satellites. Acta Astronaut. 2019, 163, 299–306. [Google Scholar]
- Meller, D.; Bozer, A. A new simulated annealing algorithm for the facility layout problem. Int. J. Prod. Res. 1996, 34, 1675–1692. [Google Scholar] [CrossRef]
- Hong, T.; Ren, S.; Jiang, W.; Xian, C. Optimization of Multi-Objective Unequal Area Facility Layout. IEEE Access 2022, 10, 38870–38884. [Google Scholar]
- Xian, C.; Wen, Y.; Yong, Z.; Xiao, C.; Wei, L. A novel satellite layout optimization design method based on phi-function. Acta Astronaut. 2021, 180, 560–574. [Google Scholar]
- Cuco, C.; Sousa, L.; Silva, J. A multi-objective methodology for spacecraft equipment layouts. Optim. Eng. 2015, 16, 165–181. [Google Scholar] [CrossRef]
- Fakoor, M.; Taghinezhad, M. Layout and configuration design for a satellite with variable mass using hybrid optimization method. Inst. Mech. Eng. Part J. Aerosp. Eng. 2015, 230, 360–377. [Google Scholar] [CrossRef]
- Fakoor, M.; Seyed, M.; Navid, G.; Hossein, S. Spacecraft Component Adaptive Layout Environment (SCALE): An efficient optimization tool. Adv. Space Res. 2016, 58, 1654–1670. [Google Scholar] [CrossRef]






| Module Specification | No. | Coordinates |
|---|---|---|
| module 1U | u1 | (0.0500, 0.0500, 0.2800) |
| module 2U | u2 | (0.1650, 0.1650, 0.2800) |
| module 3U | u3 | (0.0500, 0.0500, 0.1075) |
| module 1U | u4 | (0.1650, 0.1650, 0.1075) |
| module 2U | u5 | (0.1650, 0.0500, 0.1650) |
| module 3U | u6 | (0.0500, 0.1650, 0.1650) |
| Transfer module 1 | u7 | (0.1075, 0.0500, 0.2800) |
| Transfer module 2 | u8 | (0.1650, 0.1075, 0.2800) |
| Transfer module 3 | u9 | (0.1075, 0.1650, 0.2800) |
| Transfer module 4 | u10 | (0.0500, 0.1075, 0.2800) |
| Transfer module 5 | u11 | (0.0500, 0.0500, 0.2225) |
| Transfer module 6 | u12 | (0.1650, 0.1650, 0.2225) |
| Transfer module 7 | u13 | (0.1075, 0.0500, 0.1650) |
| Transfer module 8 | u14 | (0.1650, 0.1075, 0.1650) |
| Transfer module 9 | u15 | (0.1075, 0.1650, 0.1650) |
| Transfer module 10 | u16 | (0.0500, 0.1075, 0.1650) |
| Transfer module 11 | u17 | (0.1075, 0.0500, 0.0500) |
| Transfer module 12 | u18 | (0.1650, 0.1075, 0.0500) |
| Transfer module 13 | u19 | (0.1075, 0.1650, 0.0500) |
| Transfer module 14 | u20 | (0.0500, 0.1075, 0.0500) |
| No. | Component | Structure | Length/m | Width/m | Height/m | Mass/kg |
|---|---|---|---|---|---|---|
| 1 | OBC | Cuboid | 0.08 | 0.08 | 0.04 | 0.80 |
| 2 | Battery a | Cuboid | 0.07 | 0.08 | 0.04 | 1.10 |
| 3 | Battery b | Cuboid | 0.07 | 0.08 | 0.04 | 1.10 |
| 4 | Battery c | Cuboid | 0.07 | 0.08 | 0.04 | 1.10 |
| 5 | PCDU | Cuboid | 0.07 | 0.06 | 0.04 | 1.00 |
| 6 | Data storage | Cuboid | 0.08 | 0.08 | 0.05 | 0.65 |
| 7 | TT&C | Cuboid | 0.08 | 0.08 | 0.05 | 0.75 |
| 8 | Camera | Cylinder | 0.09 | 0.09 | 2.00 | |
| 9 | Star sensor | Cylinder | 0.05 | 0.05 | 0.45 | |
| 10 | Gyro | Cylinder | 0.07 | 0.04 | 0.65 | |
| 11 | Sun sensor | Cuboid | 0.07 | 0.08 | 0.04 | 0.35 |
| 12 | Magnetometer | Cuboid | 0.07 | 0.05 | 0.03 | 0.60 |
| 13 | GNSS | Cuboid | 0.07 | 0.06 | 0.04 | 0.70 |
| 14 | Wheel x1 | Cuboid | 0.08 | 0.08 | 0.04 | 1.80 |
| 15 | Wheel y1 | Cuboid | 0.08 | 0.08 | 0.04 | 1.80 |
| 16 | Wheel z1 | Cuboid | 0.08 | 0.08 | 0.04 | 1.80 |
| 17 | Wheel (Standby) | Cuboid | 0.08 | 0.08 | 0.04 | 1.80 |
| 18 | Magnetic torquer | Cuboid | 0.05 | 0.05 | 0.03 | 0.50 |
| No. | x/m | y/m | z/m | ||
|---|---|---|---|---|---|
| 1 | 0.050 | 0.050 | 0.2000 | 0 | u3 |
| 2 | 0.165 | 0.050 | 0.1935 | 90 | u2 |
| 3 | 0.165 | 0.165 | 0.1844 | 0 | u6 |
| 4 | 0.165 | 0.050 | 0.1352 | 90 | u2 |
| 5 | 0.050 | 0.165 | 0.1921 | 0 | u5 |
| 6 | 0.165 | 0.050 | 0.1920 | 90 | u2 |
| 7 | 0.050 | 0.165 | 0.1854 | 0 | u5 |
| 8 | 0.050 | 0.050 | 0.1919 | 0 | u3 |
| 9 | 0.165 | 0.050 | 0.6690 | 90 | u1 |
| 10 | 0.165 | 0.165 | 0.3165 | 0 | u6 |
| 11 | 0.050 | 0.165 | 0.3006 | 90 | u4 |
| 12 | 0.050 | 0.050 | 0.3170 | 0 | u3 |
| 13 | 0.165 | 0.165 | 0.1217 | 90 | u6 |
| 14 | 0.165 | 0.165 | 0.1979 | 0 | u6 |
| 15 | 0.050 | 0.165 | 0.2549 | 90 | u5 |
| 16 | 0.050 | 0.165 | 0.1923 | 90 | u5 |
| 17 | 0.050 | 0.050 | 0.1901 | 0 | u3 |
| 18 | 0.050 | 0.165 | 0.1403 | 0 | u5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Zhou, J.; Liu, G. Multi-Objective Optimization Method for Multi-Module Micro–Nano Satellite Components Assignment and Layout. Aerospace 2025, 12, 614. https://doi.org/10.3390/aerospace12070614
Zhang H, Zhou J, Liu G. Multi-Objective Optimization Method for Multi-Module Micro–Nano Satellite Components Assignment and Layout. Aerospace. 2025; 12(7):614. https://doi.org/10.3390/aerospace12070614
Chicago/Turabian StyleZhang, Hao, Jun Zhou, and Guanghui Liu. 2025. "Multi-Objective Optimization Method for Multi-Module Micro–Nano Satellite Components Assignment and Layout" Aerospace 12, no. 7: 614. https://doi.org/10.3390/aerospace12070614
APA StyleZhang, H., Zhou, J., & Liu, G. (2025). Multi-Objective Optimization Method for Multi-Module Micro–Nano Satellite Components Assignment and Layout. Aerospace, 12(7), 614. https://doi.org/10.3390/aerospace12070614