
A Multi-Mode Dynamic Fusion Mach Number Prediction Framework



Abstract
1. Introduction
2. Materials
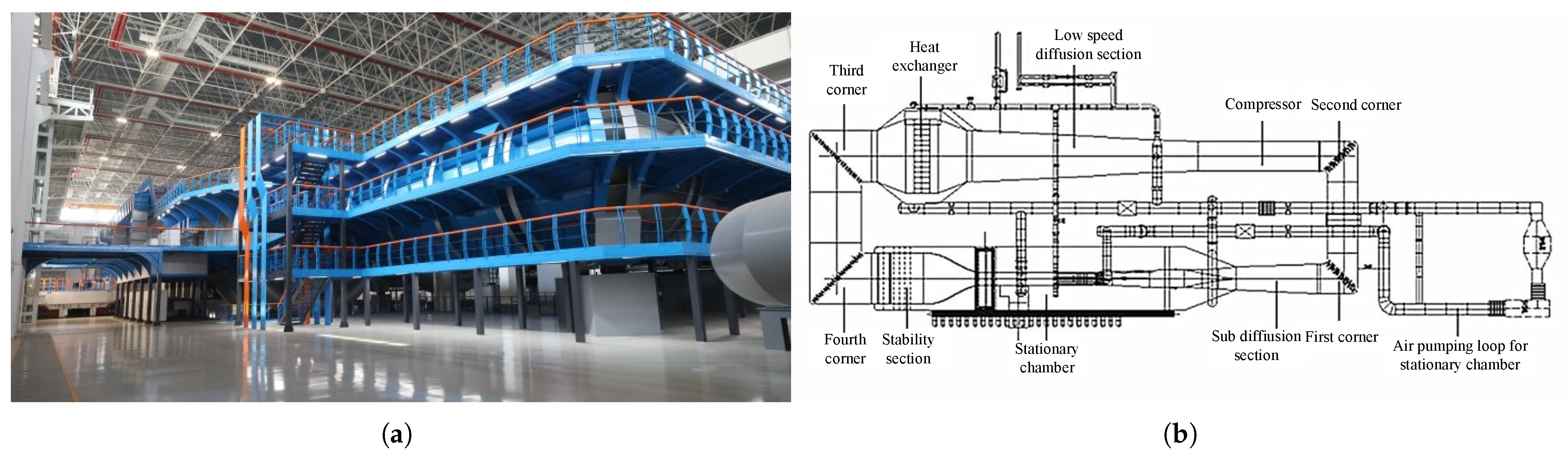
2.1. Continuous Transonic Wind Tunnel
2.2. Mach Number and Its Effects
3. Methodology
3.1. Multi-Mode Dynamic Fusion Framework for Wind Tunnel Mach Number Prediction
3.2. Single-Mode Segmented Prediction Model for Mach Numbers
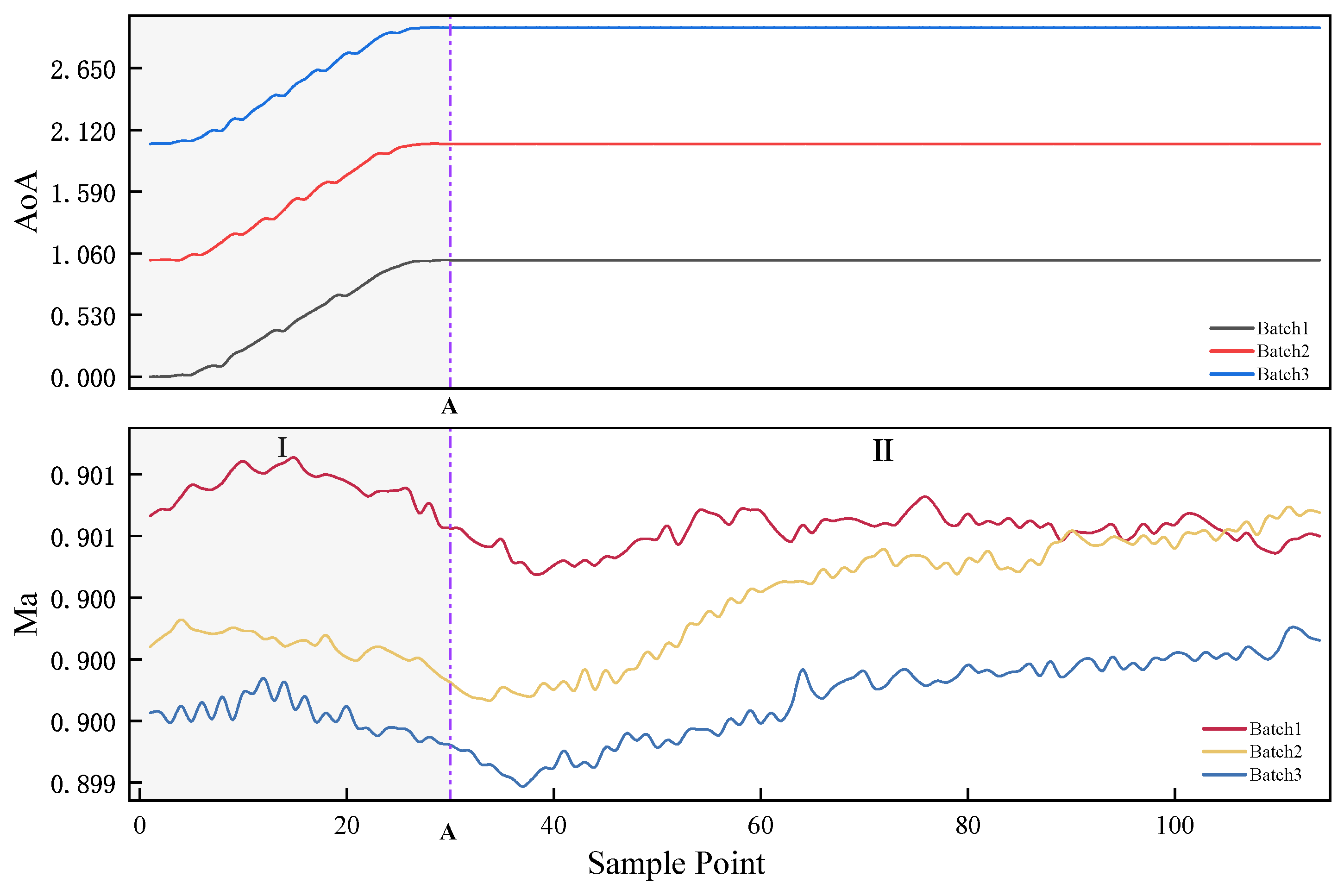
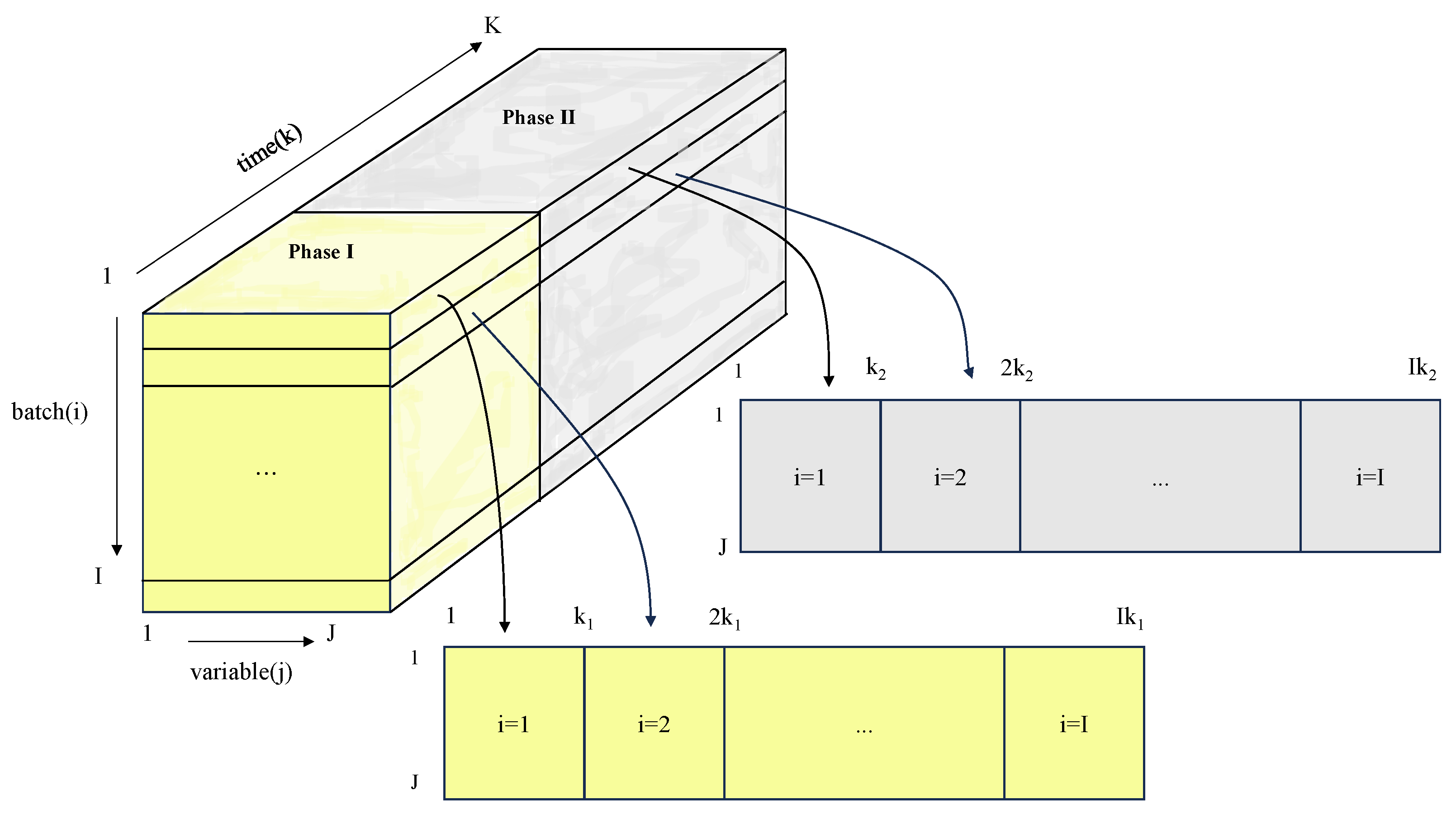
3.2.1. Wind Tunnel Test Phase Division
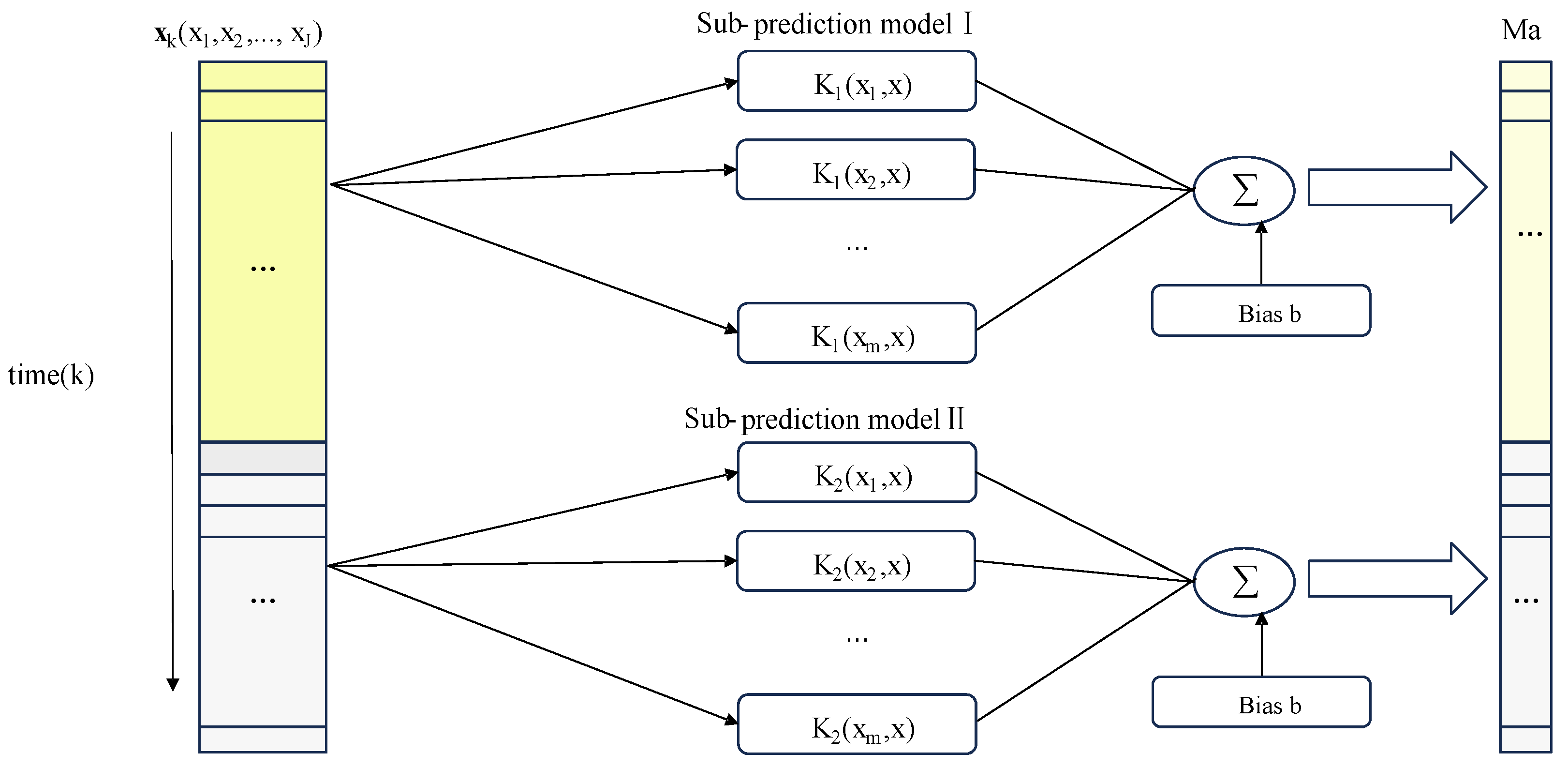
3.2.2. MSVR-Based Sub-Prediction Model
3.2.3. Hyperparameter Tuning and Optimization
3.3. Multi-Mode Prediction Model for Mach Number
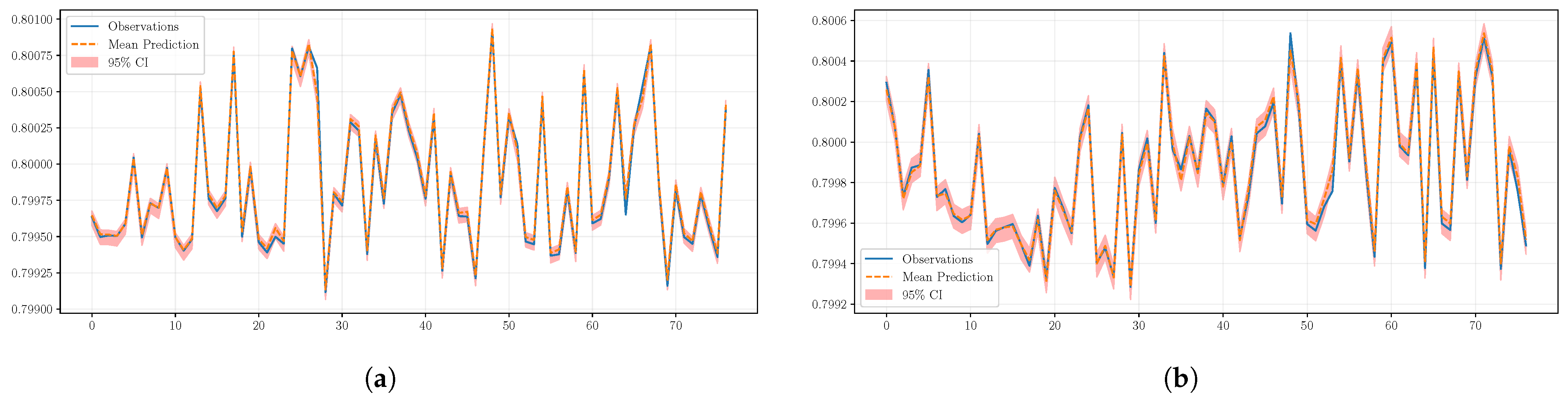
3.4. Uncertainty Quantification Framework
3.5. Model Comparison and Selection with Historical Mode Repository Update
- :The single-mode predictor demonstrates superior performance, indicating that the test data contain novel features not covered by the historical mode repository. In this scenario, the single-mode model is selected as the final predictor, and the current sample’s feature vector and corresponding Mach number vector are incorporated into the historical mode repository.
- :The multi-mode predictor achieves better performance by leveraging historical mode information, suggesting that the historical mode repository sufficiently characterizes current operational conditions. In this case, the multi-mode model is chosen as the final predictor, and no repository update is performed to mitigate overfitting risks.
3.6. Offline Training and Online Prediction
4. Illustration and Discussion
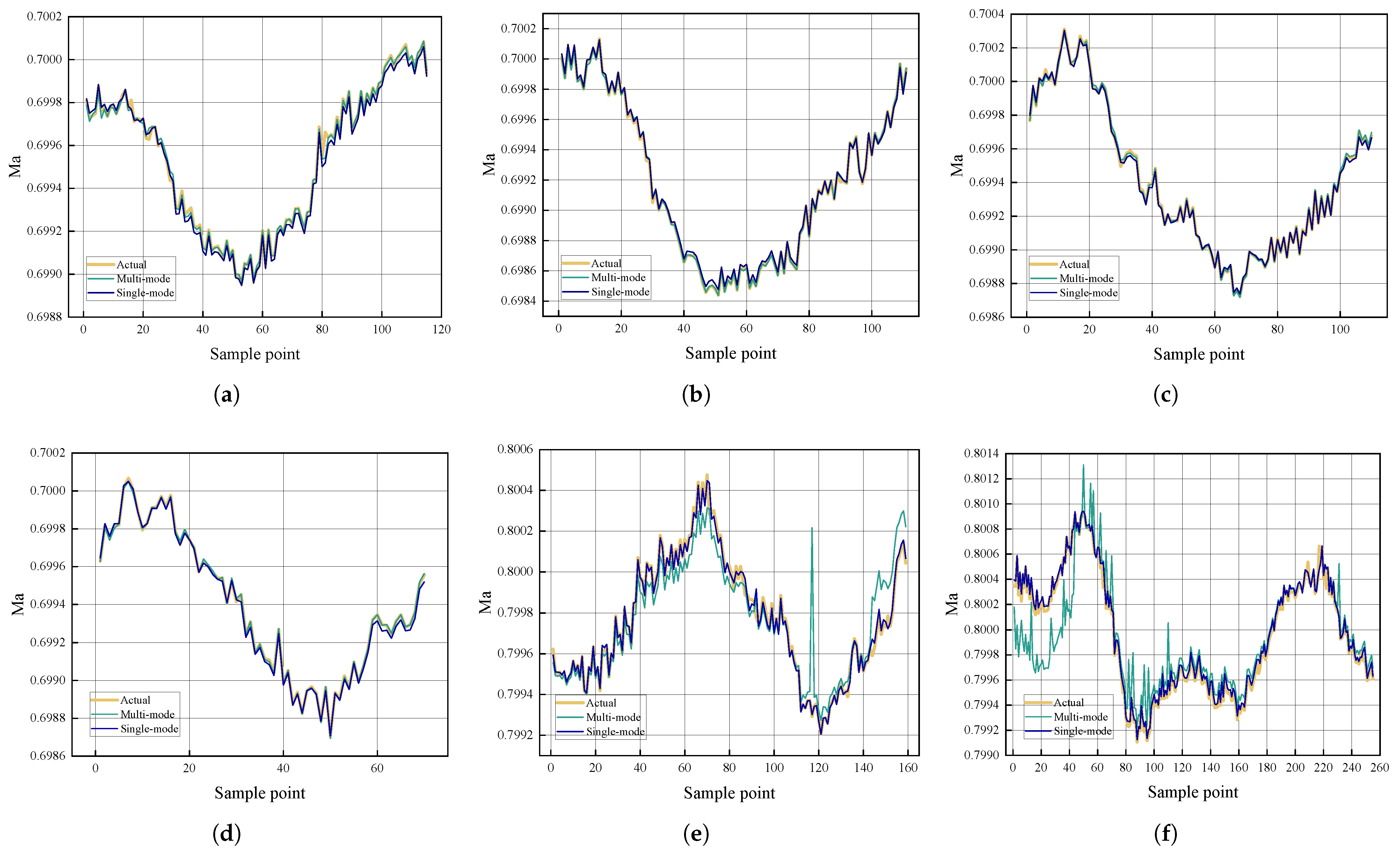
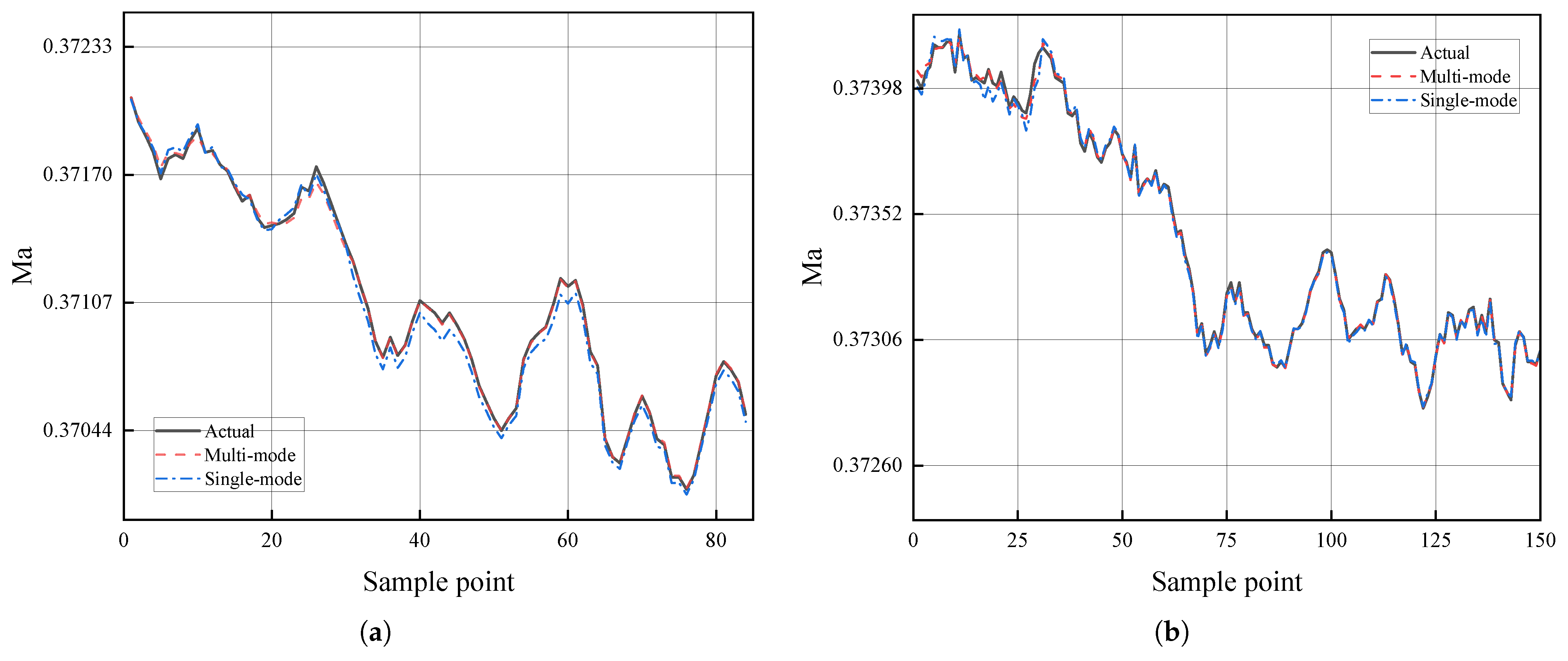
4.1. Design of Prediction Experiment and Analysis of Results
4.2. Mach Number Prediction for 0.6 m Wind Tunnel
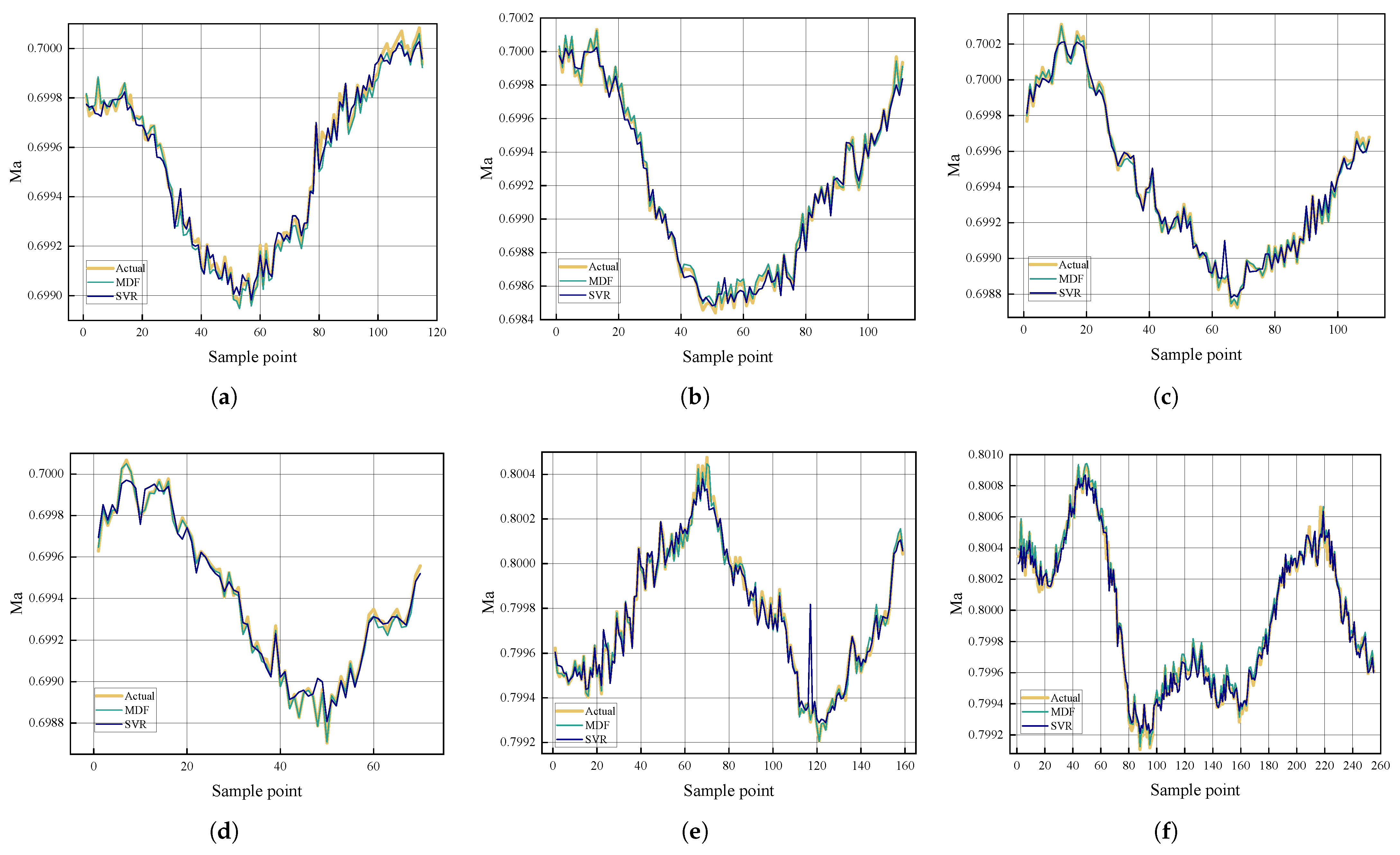
4.3. Comparison with Existing Methods
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhao, Z.; Zhao, C.; Pei, Z.; Chen, W. Design and Implementation of a Low-Speed Wind Tunnel System. In Proceedings of the 2021 IEEE 16th Conference on Industrial Electronics and Applications (ICIEA), Chengdu, China, 1–4 August 2021; pp. 273–278. [Google Scholar]
- Tan, H.; Wang, J.; Bu, C.; Mu, W.; Shen, Y.; Chen, H. Development of wind tunnel dynamic test system for coupled motion with multi-degrees of freedom. In Proceedings of the CSAA/IET International Conference on Aircraft Utility Systems (AUS 2022), Nanching, China, 17–20 August 2022; Volume 2022, pp. 488–495. [Google Scholar]
- Mo, Z.; Fu, H.Z.; Ho, Y.S. Global development and trend of wind tunnel research from 1991 to 2014: A bibliometric analysis. Environ. Sci. Pollut. Res. 2018, 25, 30257–30270. [Google Scholar] [CrossRef] [PubMed]
- He, S.; Guo, S.; Liu, Y.; Luo, W. Passive gust alleviation of a flying-wing aircraft by analysis and wind-tunnel test of a scaled model in dynamic similarity. Aerosp. Sci. Technol. 2021, 113, 106689. [Google Scholar] [CrossRef]
- Aleisa, H.; Kontis, K.; Nikbay, M. Low Observable Uncrewed Aerial Vehicle Wind Tunnel Model Design, Manufacturing, and Aerodynamic Characterization. Aerospace 2024, 11, 216. [Google Scholar] [CrossRef]
- Abbaspour, M.; Shojaee, M. Innovative approach to design a new national low speed wind tunnel. Int. J. Environ. Sci. Technol. 2009, 6, 23–34. [Google Scholar] [CrossRef]
- Yu, K.; Xu, J.; Liu, S.; Zhang, X. Starting characteristics and phenomenon of a supersonic wind tunnel coupled with inlet model. Aerosp. Sci. Technol. 2018, 77, 626–637. [Google Scholar] [CrossRef]
- Jiang, Z.; Hu, Z.; Wang, Y.; Han, G. Advances in critical technologies for hypersonic and high-enthalpy wind tunnel. Chin. J. Aeronaut. 2020, 33, 3027–3038. [Google Scholar] [CrossRef]
- Taleghani, A.S.; Ghajar, A.; Masdari, M. Experimental Study of Ground Effect on Horizontal Tail Effectiveness of a Conceptual Advanced Jet Trainer. J. Aerosp. Eng. 2020, 33, 05020001. [Google Scholar] [CrossRef]
- Shams Taleghani, A.; Ghajar, A. Aerodynamic characteristics of a delta wing aircraft under ground effect. Front. Mech. Eng. 2024, 10, 1355711. [Google Scholar] [CrossRef]
- Bunescu, I.; Stoican, M.G.; Hothazie, M.V. Experimental Determination of Pitch Damping Coefficient Using Free Oscillation Method. Aerospace 2024, 11, 579. [Google Scholar] [CrossRef]
- Teeter, S.; Plese, K.; Zulch, R.; Haid, C.; Windom, B.; Yalin, A.P.; Dumitrache, C. Development of a Supersonic Wind Tunnel Facility for Scramjet Testing at Colorado State University. In Proceedings of the AIAA SciTech 2024 Forum, Orlando, FL, USA, 8–12 January 2024. [Google Scholar]
- Sanai, S.; Hiremath, N. Implementation of Rotating Test Stand for Supersonic Wind Tunnel. In Proceedings of the 2024 Regional Student Conferences, Santa Clara, CA, USA, 1 January 2024. [Google Scholar]
- Yu, K.; Xu, J.; Li, R.; Liu, S.; Zhang, X. Experimental exploration of inlet start process in continuously variable Mach number wind tunnel. Aerosp. Sci. Technol. 2018, 79, 75–84. [Google Scholar] [CrossRef]
- Damljanović, D.; Vuković, D.; Ocokoljić, G.; Rašuo, B. New Transonic Tests of HB-2 Hypersonic Standard Models in the VTI T-38 Trisonic Wind Tunnel. Aerospace 2025, 12, 131. [Google Scholar] [CrossRef]
- Zhang, S.; Lin, Z.; Gao, Z.; Miao, S.; Li, J.; Zeng, L.; Pan, D. Wind Tunnel Experiment and Numerical Simulation of Secondary Flow Systems on a Supersonic Wing. Aerospace 2024, 11, 618. [Google Scholar] [CrossRef]
- Franzmann, C.; Leopold, F.; Mundt, C. Low-Interference Wind Tunnel Measurement Technique for Pitch Damping Coefficients at Transonic and Low Supersonic Mach Numbers. Aerospace 2022, 9, 51. [Google Scholar] [CrossRef]
- Van Pelt, R.; Zobeck, T.; Baddock, M.; Cox, J. Design, Construction, and Calibration of a Portable Boundary Layer Wind Tunnel for Field Use. Trans. ASABE 2010, 53, 1413–1422. [Google Scholar] [CrossRef]
- Hokanson, D.A.; Gerstle, J.G. Dynamic Matrix Control Multivariable Controllers. In Practical Distillation Control; Springer: New York, NY, USA, 1992; pp. 248–271. [Google Scholar]
- Wada, D.; Araujo-Estrada, S.A.; Windsor, S. Unmanned Aerial Vehicle Pitch Control under Delay Using Deep Reinforcement Learning with Continuous Action in Wind Tunnel Test. Aerospace 2021, 8, 258. [Google Scholar] [CrossRef]
- Wang, B.; Mao, Z. Evaluation of inputs for Mach number prediction model based on ANFIS. In Proceedings of the 2016 Chinese Control and Decision Conference (CCDC), Yinchuan, China, 28–30 May 2016; pp. 2805–2809. [Google Scholar]
- Yu, W.; Su, B.; Liu, G.; Tang, Z.; Zhao, L. Mach Number Prediction of Wind Tunnel Flow Field Based on RBFNN and LSTM. In Proceedings of the 2024 36th Chinese Control and Decision Conference (CCDC), Xi’an, China, 25–27 May 2024; pp. 2462–2466. [Google Scholar]
- Chen, J. Improving Performance of Ensemble Prediction Models for Mach Number in Wind Tunnels Using Metalearning. J. Aerosp. Eng. 2024, 37, 04024016. [Google Scholar] [CrossRef]
- He, R.; Sun, H.; Gao, X.; Yang, H. Wind tunnel tests for wind turbines: A state-of-the-art review. Renew. Sustain. Energy Rev. 2022, 166, 112675. [Google Scholar] [CrossRef]
- Gao, R.; Yang, J.; Yang, H.; Wang, X. Wind-tunnel experimental study on aeroelastic response of flexible wind turbine blades under different wind conditions. Renew. Energy 2023, 219, 119539. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, Y.; Liu, R.; Shen, C.; Zhang, P.; Wei, R.; Liu, X.; Xu, P. Design, validation, and benchmark tests of the aeroacoustic wind tunnel in SUSTech. Appl. Acoust. 2021, 175, 107847. [Google Scholar] [CrossRef]
- Wang, Y.; Zheng, Y.; Qu, Q.; Wong, D.S.H. Enhanced robust multimode process monitoring under dirty data via difference-based decomposition of matrix. J. Process Control 2023, 132, 103080. [Google Scholar] [CrossRef]
- Memarian, A.; Raveendran, R.; Huang, B. Robust multi-mode probabilistic slow feature analysis with application to fault detection. J. Process Control 2023, 132, 103130. [Google Scholar] [CrossRef]
- Zhao, L.; Yang, J. High-Precision Quality Prediction Based on Two-Dimensional Extended Windows. Mathematics 2024, 12, 1396. [Google Scholar] [CrossRef]
- Maestri, M.; Farall, A.; Groisman, P.; Cassanello, M.; Horowitz, G. A robust clustering method for detection of abnormal situations in a process with multiple steady-state operation modes. Comput. Chem. Eng. 2010, 34, 223–231. [Google Scholar] [CrossRef]
- Shang, J.; Zhou, D.; Chen, M.; Ji, H.; Zhang, H. Incipient sensor fault diagnosis in multimode processes using conditionally independent Bayesian learning based recursive transformed component statistical analysis. J. Process Control 2019, 77, 7–19. [Google Scholar] [CrossRef]
- Tang, P.; Peng, K.; Dong, J.; Zhang, K.; Zhao, S. Monitoring of Nonlinear Processes With Multiple Operating Modes Through a Novel Gaussian Mixture Variational Autoencoder Model. IEEE Access 2020, 8, 114487–114500. [Google Scholar] [CrossRef]
- Zhao, S.J.; Zhang, J.; Xu, Y.M. Performance monitoring of processes with multiple operating modes through multiple PLS models. J. Process Control 2006, 16, 763–772. [Google Scholar] [CrossRef]
- Ghoneim, S.S.M.; Farrag, T.A.; Rashed, A.A.; El-Kenawy, E.S.M.; Ibrahim, A. Adaptive Dynamic Meta-Heuristics for Feature Selection and Classification in Diagnostic Accuracy of Transformer Faults. IEEE Access 2021, 9, 78324–78340. [Google Scholar] [CrossRef]
- Zhao, L.; Shao, Y.; Jia, W. NARX-Elman Based Mach Number Prediction and Model Migration of Wind Tunnel Conditions. Aerospace 2023, 10, 498. [Google Scholar] [CrossRef]
- Peherstorfer, B.; Willcox, K.; Gunzburger, M. Survey of Multifidelity Methods in Uncertainty Propagation, Inference, and Optimization. SIAM Rev. 2018, 60, 550–591. [Google Scholar] [CrossRef]
- Bottigliero, R.; Rossano, V.; De Stefano, G. Transonic Dynamic Stability Derivative Estimation Using Computational Fluid Dynamics: Insights from a Common Research Model. Aerospace 2025, 12, 304. [Google Scholar] [CrossRef]
- Wang, K.; Gopaluni, R.B.; Chen, J.; Song, Z. Deep Learning of Complex Batch Process Data and Its Application on Quality Prediction. IEEE Trans. Ind. Inform. 2020, 16, 7233–7242. [Google Scholar] [CrossRef]
- Smola, A.J.; Schölkopf, B. A tutorial on support vector regression. Stat. Comput. 2004, 14, 199–222. [Google Scholar] [CrossRef]
- Vapnik, V. An overview of statistical learning theory. IEEE Trans. Neural Netw. 1999, 10, 988–999. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Op. Cond. | Rotational Speed * | Mach | Angle of Attack (°) | Step | Mode | |
|---|---|---|---|---|---|---|
| Init. | Target | |||||
| 1 | 99,558.05917 | 0.699534704 | 0 | 1 | 1 | Mode 1 |
| 2 | 99,493.88619 | 0.699175622 | 1 | 2 | 1 | |
| 3 | 99,454.80526 | 0.699411473 | 2 | 3 | 1 | |
| 4 | 99,424.21719 | 0.699397671 | 3 | 4 | 1 | |
| 5 | 122,928.1215 | 0.749480922 | 0 | 1 | 1 | Mode 2 |
| 6 | 122,957.4735 | 0.749549922 | 1 | 2 | 1 | |
| 7 | 122,970.6545 | 0.749594155 | 2 | 3 | 1 | |
| 8 | 122,904.0493 | 0.749532200 | −1 | 0 | 1 | |
| 9 | 122,889.2200 | 0.749687419 | −2 | −1 | 1 | |
| 10 | 122,878.9001 | 0.749774629 | −3 | −2 | 1 | |
| 11 | 122,864.1246 | 0.749702279 | −4 | −3 | 1 | |
| 12 | 99,268.44423 | 0.799764610 | 0 | −4 | 4 | Mode 3 |
| 13 | 99,277.27568 | 0.799962169 | 3 | 0 | 3 | |
| 14 | 99,243.15331 | 0.899702261 | 3 | 4 | 1 | Mode 4 |
| 15 | 99,263.26872 | 0.899673543 | 0 | 1 | 1 | |
| 16 | 99,273.85014 | 0.900436930 | 0 | 1 | 1 | |
| 17 | 99,265.19974 | 0.900830480 | 2 | 3 | 1 | |
| 18 | 99,258.59567 | 0.899458614 | −1 | 0 | 1 | |
| 19 | 99,249.41991 | 0.899568391 | −2 | 1 | 1 | |
| 20 | 99,244.36194 | 0.900081034 | −3 | −4 | 1 | |
| 21 | 99,251.42098 | 0.900437743 | −4 | −3 | 1 | |
| Mode | Phase | C | Kernel | R2 |
|---|---|---|---|---|
| Mode 1 | I | 4.3 | linear | 0.98994 |
| II | 2 | linear | 0.99314 | |
| Mode 2 | I | 1 | linear | 0.99294 |
| II | 2 | linear | 0.99530 | |
| Mode 3 | I | 4 | linear | 0.99342 |
| II | 0.5 | linear | 0.99346 | |
| Mode 4 | I | 10 | linear | 0.98835 |
| III | 3 | linear | 0.99148 |
| Model | RMSE | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 12 | 13 | |
| Single | 1.892 × 10 −5 | 1.213 × 10 −5 | 8.169 × 10 −6 | 7.093 × 10 −6 | 1.925 × 10 −5 | 1.916 × 10 −5 |
| Multi | 2.431 × 10 −5 | 9.790 × 10 −6 | 9.912 × 10 −6 | 7.729 × 10 −6 | 8.393 × 10 −5 | 2.184 × 10 −4 |
| Mode | Regression Coefficients | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 12 | 13 | |
| 2 | 2.58674872 | 1.63067606 | 1.87098467 | 2.47460826 | 0.47066857 | 0.26515986 |
| 4 | 2.50064049 | 1.14202629 | 1.18044088 | 1.71108623 | 1.07259065 | 0.84874814 |
| Model | RMSE | ||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| Single | 4.515 × 10−5 | 1.400 × 10−5 | 1.473 × 10−4 | 1.153 × 10−4 | 1.678 × 10−4 |
| Multi | 2.047 × 10−5 | 9.544 × 10−6 | 1.094 × 10−5 | 1.608 × 10−5 | 1.212 × 10−5 |
| Model | RMSE | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 12 | 13 | |
| SVR | 3.966 × 10−5 | 5.794 × 10−5 | 4.990 × 10−5 | 6.706 × 10−5 | 8.208 × 10−5 | 4.401 × 10−5 |
| PLS | 5.974 × 10−5 | 4.860 × 10−5 | 2.058 × 10−5 | 3.651 × 10−5 | 2.591 × 10−5 | 3.353 × 10−5 |
| LSTM | 3.846 × 10−5 | 4.511 × 10−5 | 5.102 × 10−5 | 5.038 × 10−5 | 3.272 × 10−5 | 4.829 × 10−5 |
| MDF | 2.431 × 10−5 | 9.790 × 10−6 | 9.912 × 10−6 | 7.729 × 10−6 | 1.925 × 10−5 | 1.916 × 10−5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.; Li, W.; Xu, W. A Multi-Mode Dynamic Fusion Mach Number Prediction Framework. Aerospace 2025, 12, 569. https://doi.org/10.3390/aerospace12070569
Zhao L, Li W, Xu W. A Multi-Mode Dynamic Fusion Mach Number Prediction Framework. Aerospace. 2025; 12(7):569. https://doi.org/10.3390/aerospace12070569
Chicago/Turabian StyleZhao, Luping, Weihao Li, and Wentao Xu. 2025. "A Multi-Mode Dynamic Fusion Mach Number Prediction Framework" Aerospace 12, no. 7: 569. https://doi.org/10.3390/aerospace12070569
APA StyleZhao, L., Li, W., & Xu, W. (2025). A Multi-Mode Dynamic Fusion Mach Number Prediction Framework. Aerospace, 12(7), 569. https://doi.org/10.3390/aerospace12070569