1. Introduction
Quasi-satellite orbits are distant retrograde orbits that are often classified as f-family in the literature [
1], are usually stable, and have gained attention as potential candidates for the exploration of the Moon and remote planetary satellites in the Circular Restricted Three-Body Problem. Distant retrograde orbits (DROs), are periodic orbits in the rotating frame and appear as large quasi-elliptical retrograde orbits around the secondary body, hence QSOs. QSOs are characterized by their interactions with two Lagrange points (
and
) of the CRTBP, which provide gravitational balance and stability. QSOs have several advantages over other types of orbits, such as low energy requirements, low perturbations, high visibility, and more extended periods [
2]. Several mission design proposals have used QSOs or DROs as parking orbits, staging orbits, or communication relay orbits for various purposes, such as scientific exploration, resource utilization, or human settlement [
3,
4]. A few recent examples include NASA’s Orion spacecraft, which entered a DRO around the Moon during the Artemis 1 mission, becoming the first spacecraft to use this orbit [
5]. China’s Chang’e 5 orbiter also entered a DRO around the Moon in 2022 after returning lunar samples to Earth and performing solar observations at another Lagrange point [
6]. DROs have been proposed for other missions, such as the Jupiter Icy Moons Orbiter, which would have used a DRO around Europa to study its surface and subsurface ocean [
7]. JAXA’s upcoming robotic sample return mission, Martian Moons eXploration (MMX), will use QSO to explore Phobos [
8].
Most of these missions use the planar QSO or DRO family and have several mission limitations on using these orbits for scientific imaging of high-latitude regions of the planetary satellites. In this paper, following [
9,
10,
11], we leverage the vertical instability of planar families to identify out-of-plane QSOs that bifurcate from the families of planar QSOs and implement low-thrust transfer strategies to reach these three-dimensional QSOs (3D-QSOs) using a beam-search-aided successive convex optimization method [
12]. Specifically, we have used the bifurcated families from the planar QSO families around the Moon in the Earth–Moon CRTBP system. In this paper, firstly, retrograde families of periodic orbits are computed numerically using single shooting and pseudo-arclength continuation methods [
13] followed by bifurcation analysis to detect out-of-plane bifurcation points [
14,
15,
16] and used as a first guess for a multiple shooting strategy that generates entire families of spatial retrograde orbits around the Moon [
17,
18]. Later, we utilize family members as intermediate orbits to connect them with the planar and spatial QSO using a beam search algorithm using successive convex optimization.
Previously, transfers to QSO from Low Earth Orbits using the manifolds of collinear equilibrium point orbits of the Sun–Earth CRTBP have been studied by Scott and Spencer [
19], and in the framework of Earth–Moon CRTBP by [
20,
21,
22]. Low-energy transfers from Lyapunov orbits around cis-lunar Lagrangian points to QSO were studied by [
23]. Lam [
24] studied the stability of QSO, proposing different transfers between different altitude QSOs using either impulsive or low-thrust propulsion. They applied this strategy to the Jupiter–Europa and Jupiter–Ganymede systems, showing examples of low-thrust trajectories from retrograde relative orbits around the two Jovian moons. Later, transfers near Phobos between QSOs in the context of Martian Moon exploration were studied [
25,
26]. Despite the number of studies that can be found in the literature, the problem of finding and implementing appropriate optimal transfer techniques between relative planar QSOs, planar to 3D-QSOs, and planet-centric orbits to QSOs is still open to debate.
Classical numerical methods for trajectory optimization problems are divided into indirect and direct methods [
27,
28]. The utilization of convex optimization tools in spacecraft trajectory design is highly advantageous [
29]. Despite being categorized as a direct method, these tools enable the finding of optimal solutions for convex optimization problems through efficient polynomial-time algorithms. Furthermore, any local optimal solution obtained through this technique satisfies the globally optimal condition [
30]. In general, trajectory optimization problems exhibit non-convexity as a result of the presence of nonlinear equations of motion. However, this challenge can be solved by applying convexification techniques such as lossless convexification [
31,
32] and successive convexification [
33,
34,
35,
36]. The optimization problem that arises from lossless and successive convexification techniques is commonly referred to as successive convex optimization. This study builds upon the successive convex optimization and beam search strategy previously applied to low-thrust transfers between halo orbits [
12,
35]. Unlike earlier work, which focused on planar halo dynamics, the present paper tackles a more complex problem involving transfers between quasi-satellite orbits with significant spatial components. The algorithmic framework is adapted to account for the challenges in the QSO regime, including increased dynamical instability, vertical bifurcations, and the need for designing accurate 3D trajectories. This work extends the work of [
12] to explore the optimal low-thrust transfer solutions between planar and spatial QSOs. Although the method has proven to provide optimal results for the case of halo–halo transfer, the current work considers periodic orbits with multiplying orbital periods to tackle this transfer problem.
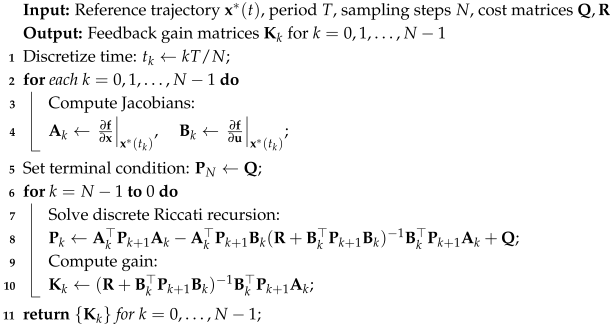
In this research, we have also used the linear quadratic regulator [
37,
38] of control for station-keeping spacecraft around the Moon. Application of LQR control to spatial periodic orbit families such as 3D-QSOs near the Moon in the Earth–Moon CRTBP framework is also discussed. In this research paper, we apply a commonly used technique for creating feedback control systems based on linear dynamics models, the LQR, to seek and identify the best control inputs by minimizing a quadratic cost function across the states and control inputs of the system. By linearizing the dynamics around a selected reference orbit or point, LQR may be used to stabilize periodic orbits in CRTBP [
38]. The linearized model predicts the system’s behavior close to the reference orbit. The system may then be stabilized and regulated around the reference orbit using LQR to construct the control inputs.
Several methods have been explored for designing low-thrust transfers in the CRTBP, including manifold-based connections and direct trajectory optimization. Manifold-based methods exploit the natural dynamics for efficient paths but are typically restricted to impulsive regimes or require precise energy matching. Direct methods offer flexibility but often depend on high-quality initial guesses and may suffer from poor convergence in nonlinear settings. In contrast, our approach integrates beam search for systematic guess generation and successive convexification for robust convergence, offering a practical trade-off between accuracy, generality, and computational cost.
This paper is organized as follows.
Section 2 introduces the dynamical model and equations of motion used in this work.
Section 3 elaborates on the computation of out-of-plane retrograde orbits around the Moon.
Section 4 presents the trajectory optimization used in this research, more explicitly discussing the orbit-chaining process, defining the optimal control problem, and successive convex optimization.
Section 5 and
Section 6 summarize and apply the transfer methods using beam-search-aided successive convex optimization and application of LQR control of the chosen family of 3D-QSOs with some optimal low-thrust transfer and station-keeping results. Finally,
Section 7 provides this research’s summary, key findings, and conclusions.
3. Numerical Computation of Periodic Orbits
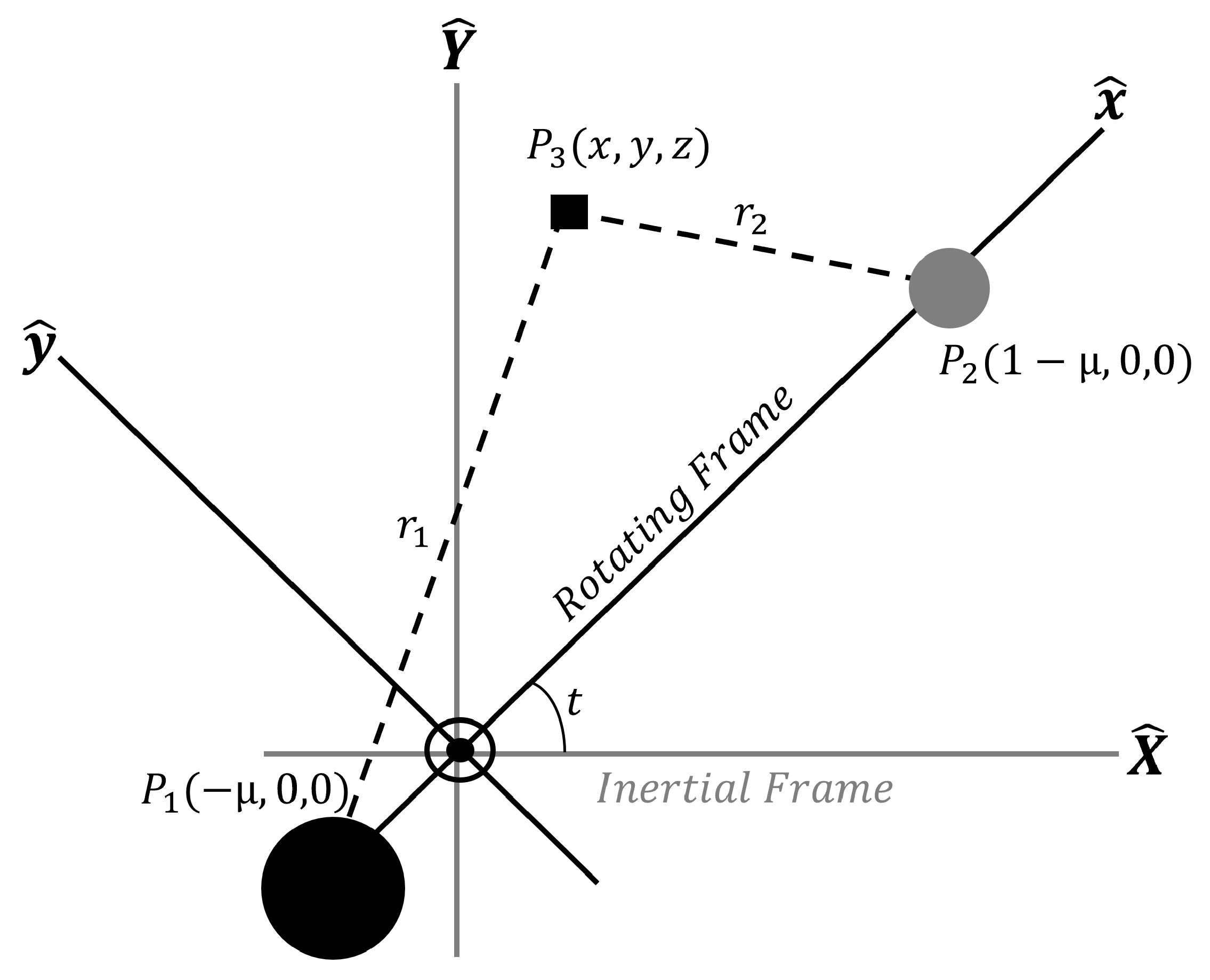
In dynamical systems theory, periodic orbits are defined as trajectories that repeat over a certain period of time. Let
and
T be the initial state vector and time of flight of a spacecraft. The fundamental problem of computing a periodic orbit is finding a set of variables
that satisfies periodicity and phase conditions [
14,
16].
Figure 3 illustrates the periodic and phase constraints to compute a periodic orbit. Periodicity condition ensures that the propagated orbit is periodic, such that the initial state vector propagated over a time
T coincides with the final state at a specific time. Periodicity condition can be conventionally expressed as
where
is a terminal state vector propagated from
between initial and final times
and
.
It is worth noting that the number of variables is one more than the constraints defined by the Equation (
8). As a result, we add a constraint that fixes the phase of
, allowing
to be found only once on the periodic orbit. The phase constraint of a periodic orbit is defined by
Combining Equations (
8) and (
9), the equation to find periodic solution is derived as
Suitable predictor–corrector schemes can be used to trace continuous periodic family solutions that account for changes in
and
T along the curve representing the periodic orbit family in the
plane. The predictor–corrector method proposed by [
16] is considered in this work and outlined in the following subsections to provide a unique solution for Equation (
10).
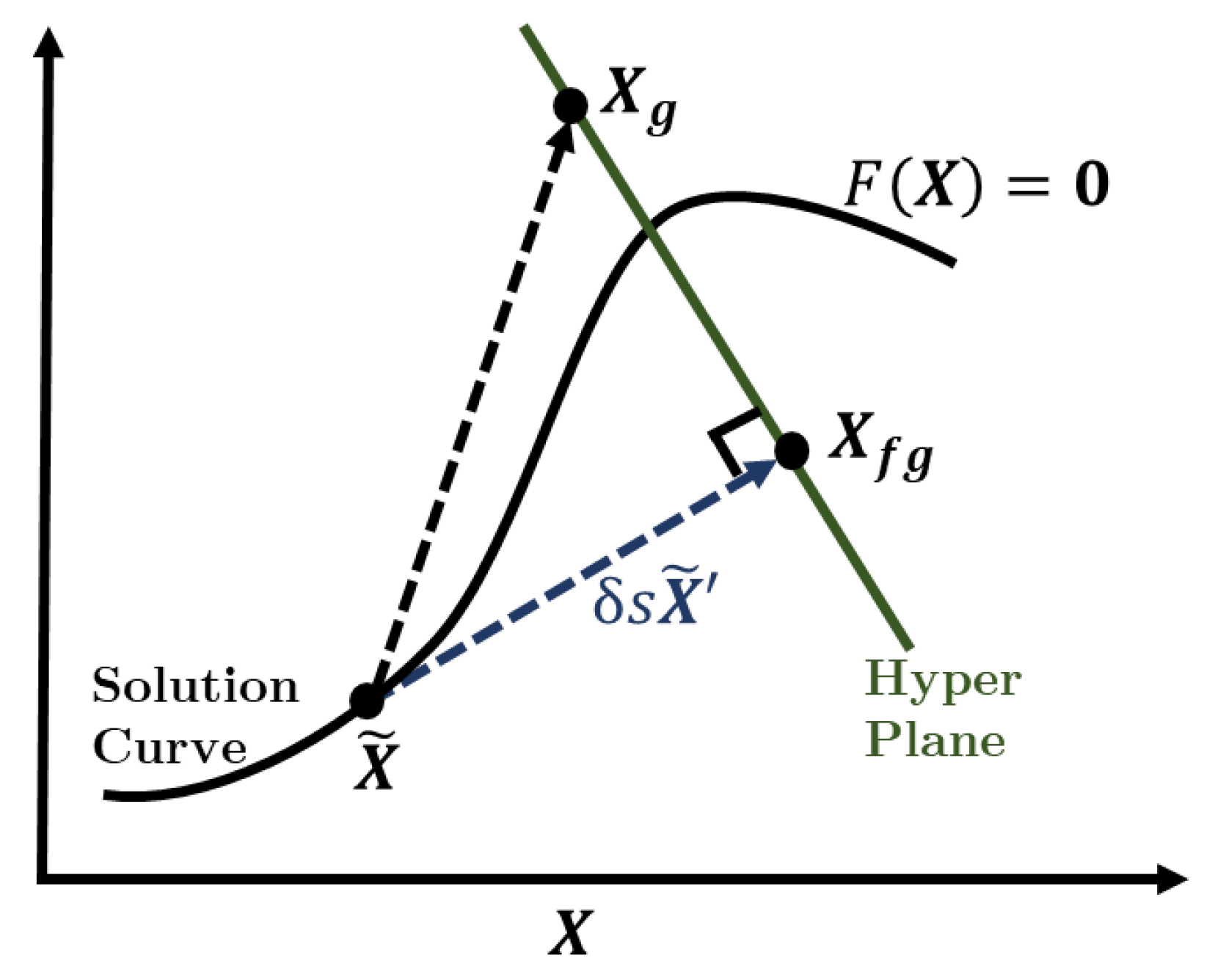
3.1. Predictor: Pseudo-Arclength Continuation
In this work, we use the pseudo-arclength continuation method predictor step as described in [
13] to develop families of periodic orbits.
Let
be a solution of
,
be the unit tangential vector to the curve at
, and
define prediction step size as shown in
Figure 4. Then, a first guess for the next correction step
can be obtained along
as
Pseudo-arclength continuation scheme constraints to the solution guess
can be defined by
The schematic of the pseudo-arclength continuation process is depicted in
Figure 4, whereby the predictor creates a first guess at the next correction step
along
with a specific step size
. The guess
is then iteratively corrected with a constraint Equation (
12) on the orthogonal hyperplane to
indicated as a green line in
Figure 4.
The variable is a small parameter (e.g., ), whose magnitude can be adjusted throughout the continuation process to control the number of family members being computed.
3.2. Corrector: Shooting Method
The equation to be solved to correct the periodic orbits is derived by incorporating the pseudo-arclength continuation constraint Equation (
12) with periodic and phase conditions of Equation (
11).
Even though
from the predictor step is only a projected value, it is indeed unlikely that each of Equation (
13)’s constraints are satisfied. The predicted solution is, however, close to the true solution; Newton’s method can be used to numerically iterate the predicted solution until Equation (
13) converges to zero or close to a tolerance margin. Now, defining
as the correction vector of
, the objective function at the next guess can be given by first-order Taylor’s expansion:
where
is the Jacobian and expressed as
where
corresponds to the state transition matrix (STM) from
to
. STM after one orbital period is also known as monodromy matrix, M, which helps analyze the stability of the computed periodic orbits in the next subsection.
and
are components of
updating
and
T, respectively.
On eliminating the higher order terms from Equation (
14), the periodic solution
is converged by iteratively updating the
vector.
Upon convergence, the algorithm solves the boundary value problem, which allows the predictor–corrector scheme to be reinitialized and continue along the branch of the periodic orbit family.
3.3. Bifurcated Retrograde Families
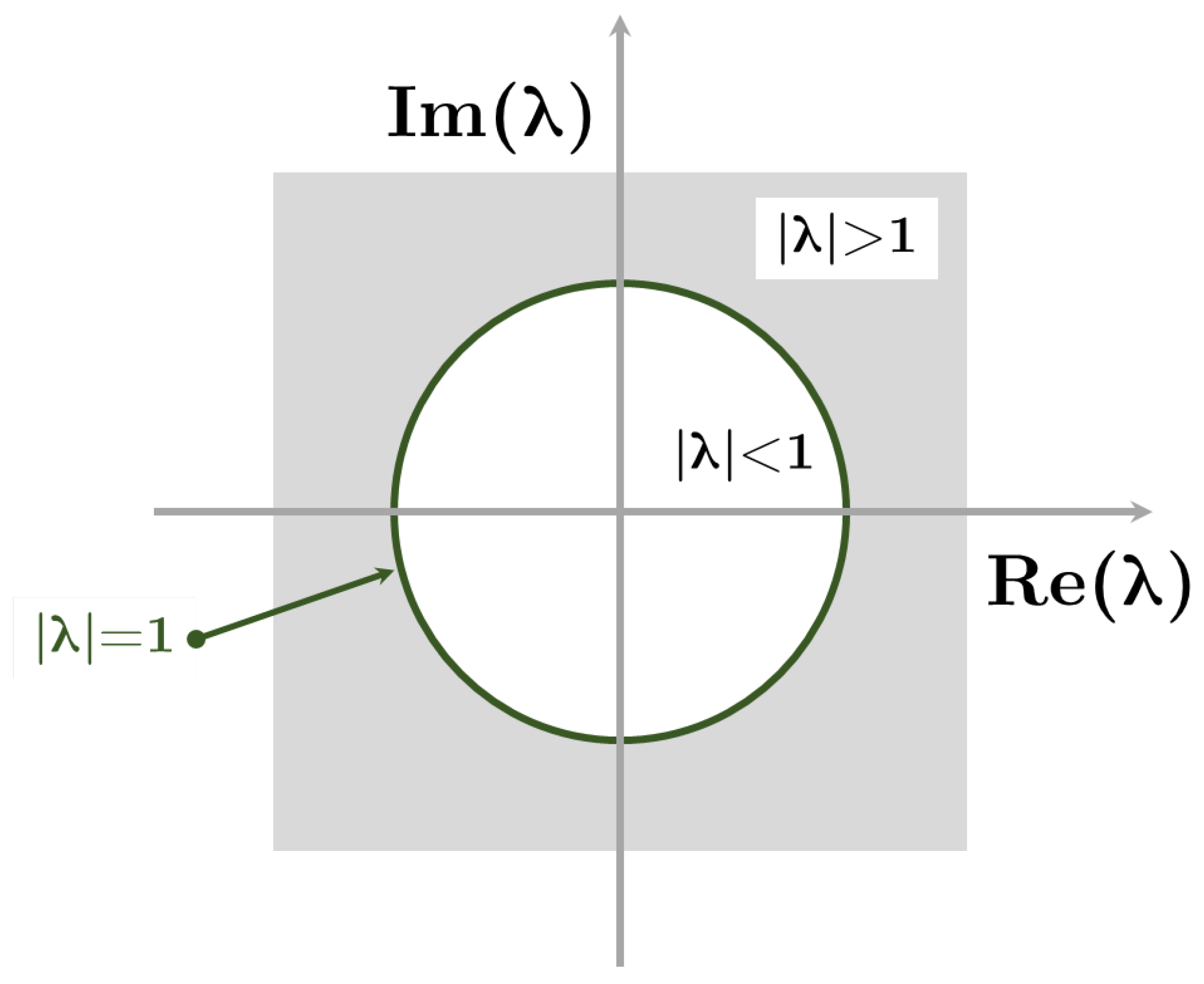
The monodromy matrix, M, defined as the state transition matrix propagated for exactly one period of the orbit, is commonly used to determine orbital stability. Let
be a small perturbation about the initial state of the computed periodic orbit. State transition matrix maps this initial deviation forward in time after ’n’ orbital periods.
Following the nature of Hamiltonian dynamical systems, for each eigenvalue
of M,
is also an eigenvalue, and occurs in reciprocal pairs [
42,
43]. Also, if
, then
and
are eigenvalues of M. Periodic orbits are stable only when all of the eigenvalues (
) of M have a magnitude less than unity, i.e.,
.
Figure 5 illustrates the stability bounds for eigenvalues of the monodromy matrix in the complex plane to the unit circle. Non-trivial and complex eigenvalues placed on the unit circle (
) indicate the existence of oscillatory modes. A pair of reciprocal eigenvalues that are placed off the unit circle, on the other hand, indicates the presence of unstable (
) and stable (
) modes governing the motion in the vicinity of the periodic orbit. Bifurcation occurs when a pair of non-trivial eigenvalues reach any critical value, which will be discussed in the following subsection.
Let
be the periodic solution of Equations of motion, then
Neglecting H.O.T. yields
, where
is an identity matrix, resulting with an eigenvalue
. If this is true, a second eigenvalue must be equal to unity as well. Furthermore, the characteristic polynomial of a 6-by-6 monodromy matrix can be further simplified as
where
,
,
,
are other non-trivial eigenvalues of M, and
and
must be real with
for a periodic orbit to be stable.
Values
and
are referred to as stability indices and will be evaluated throughout this thesis to assess the stability of the periodic orbits [
42,
44]. Following [
45],
and
are calculated as
where
and
,
Equation (
21) provides an efficient relation for computing the eigenvalues of the monodromy matrix of any periodic orbit of a six-dimensional autonomous Hamiltonian system.
Naturally, once the eigenvalues of M are known, the resulting eigenvectors can be used to compute the invariant manifolds associated with the periodic orbit. The invariant manifolds of a periodic orbit are computed by perturbing the states along the direction of periodic orbit’s local eigenvectors.
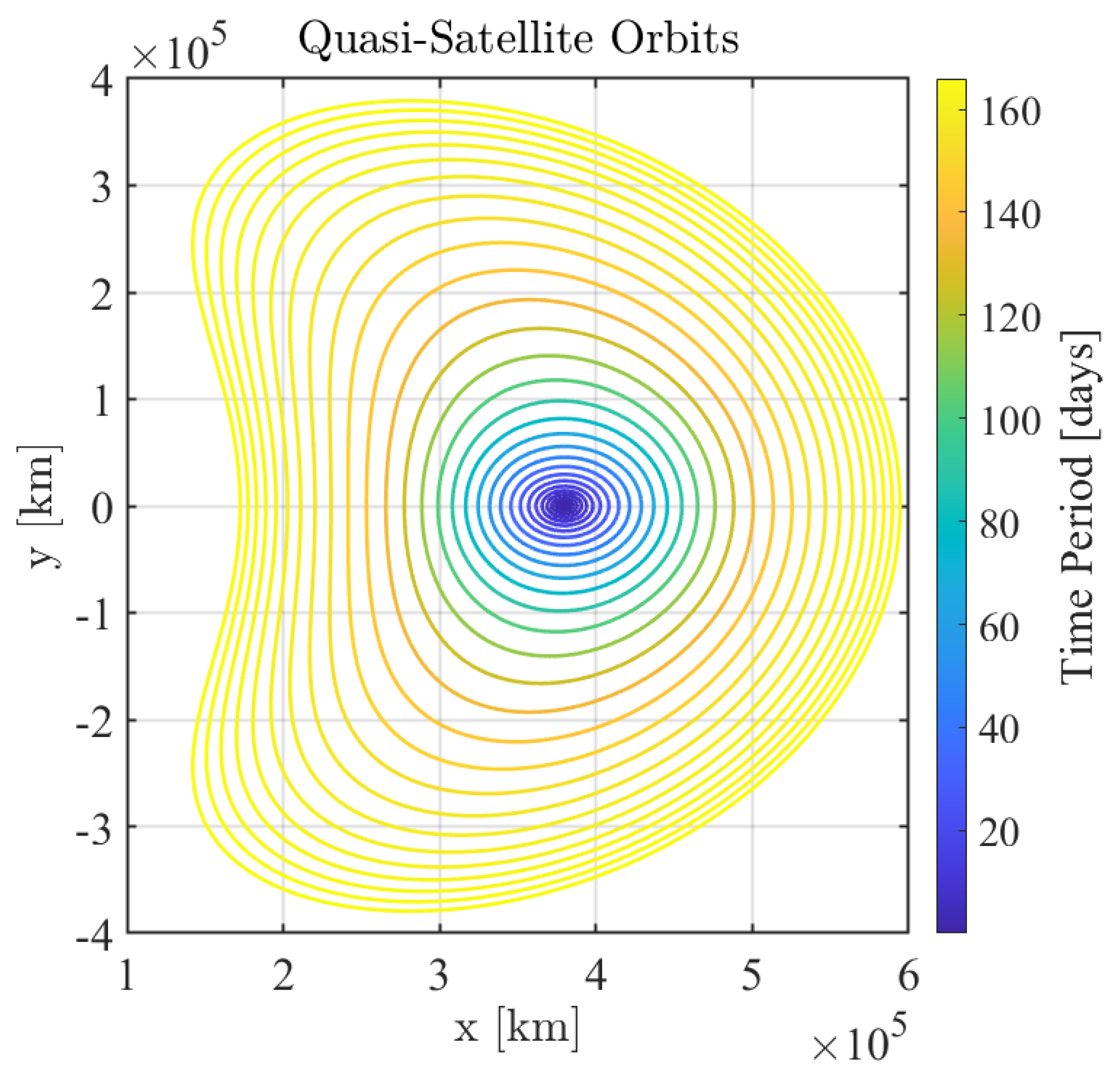
QSOs are retrograde periodic orbits existing around the smaller primary. They are also known as DROs and family-f orbits. QSOs are generally considered one of the three kinds of co-orbital configurations in CRTBP with 1:1 resonance. In this research, we have utilized pseudo-arclength continuation and shooting methods for calculating planar QSO families, as shown in the
Figure 6.
The periodic orbits of the retrograde family branch obtained through the pseudo-arclength continuation method are shown in
Figure 7 with the stability indices of each family branch computed from Equation (22).
As shown by the linear analysis indicated by the stability indices of the periodic orbit monodromy matrix eigenvalues, these relative orbits are linearly stable (i.e., when stability index
). In a Hamiltonian system, the monodromy matrix of a periodic orbit, M (
) is the state transition matrix of a periodic orbit after one time period and has three pairs of eigenvalues with one trivial pair
. We bifurcate the planar family using their stability indices defined as in Equation (22) [
43,
44], where
and 1/
are
jth reciprocal eigenvalues pairs of monodromy matrix M.
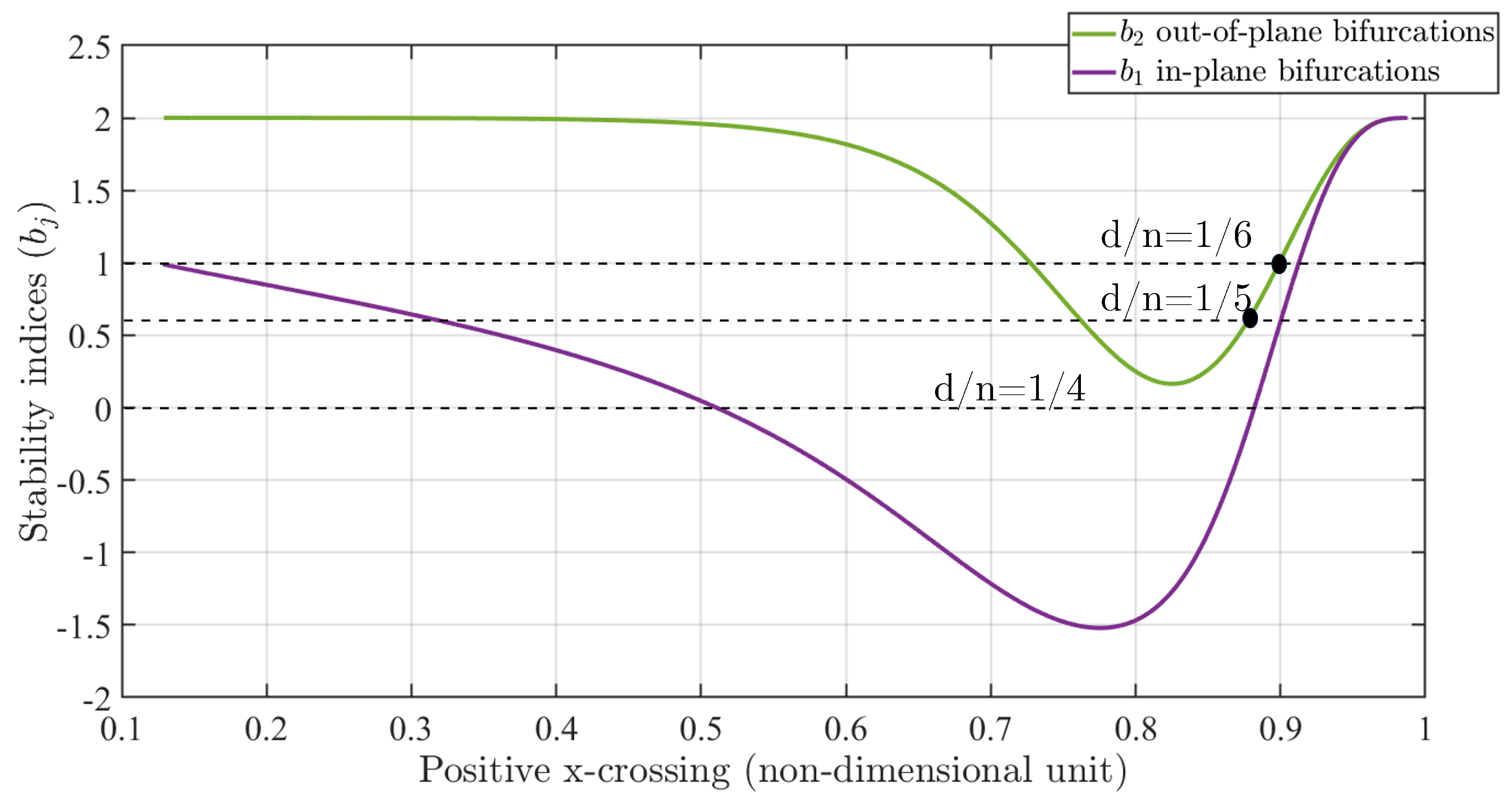
Important characteristics of stability indices are when they reach any resonant value
, and the state corresponds to a bifurcation point indicated using Equation (23) [
11,
46,
47]. In the literature, periodic orbits bifurcating via in-plane perturbations are
or
-
[
48,
49,
50], and the members bifurcating from out-of-plane perturbations are
-
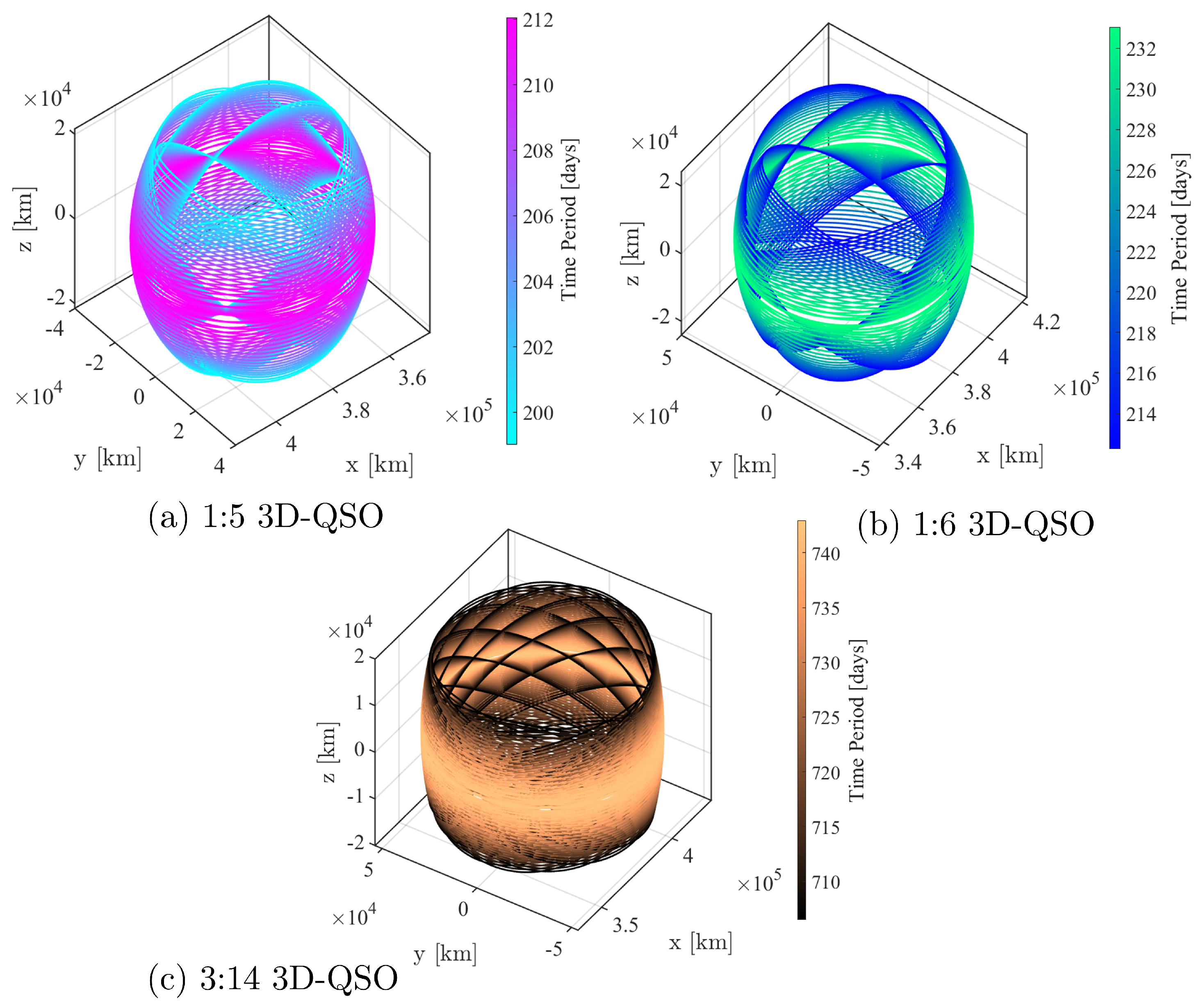
. In this work, we consider the out-of-plane bifurcated families of both retrograde and prograde orbits. An example of bifurcated out-of-plane retrograde orbit of
= 1/5,
= 1/6, and
= 3/14 with
of 0.618, 1 and 0.445 are shown within
Figure 8.
Figure 9 illustrates the 3D or spatial members of QSOs or DROs branching out from the planar families of DRO in the Earth–Moon CRTBP system. The colors blue and red represent the stable and unstable members of the computed families. A more detailed description of the computation and classification of these families is provided in [
51,
52], where bifurcation conditions and stability criteria are analyzed comprehensively.
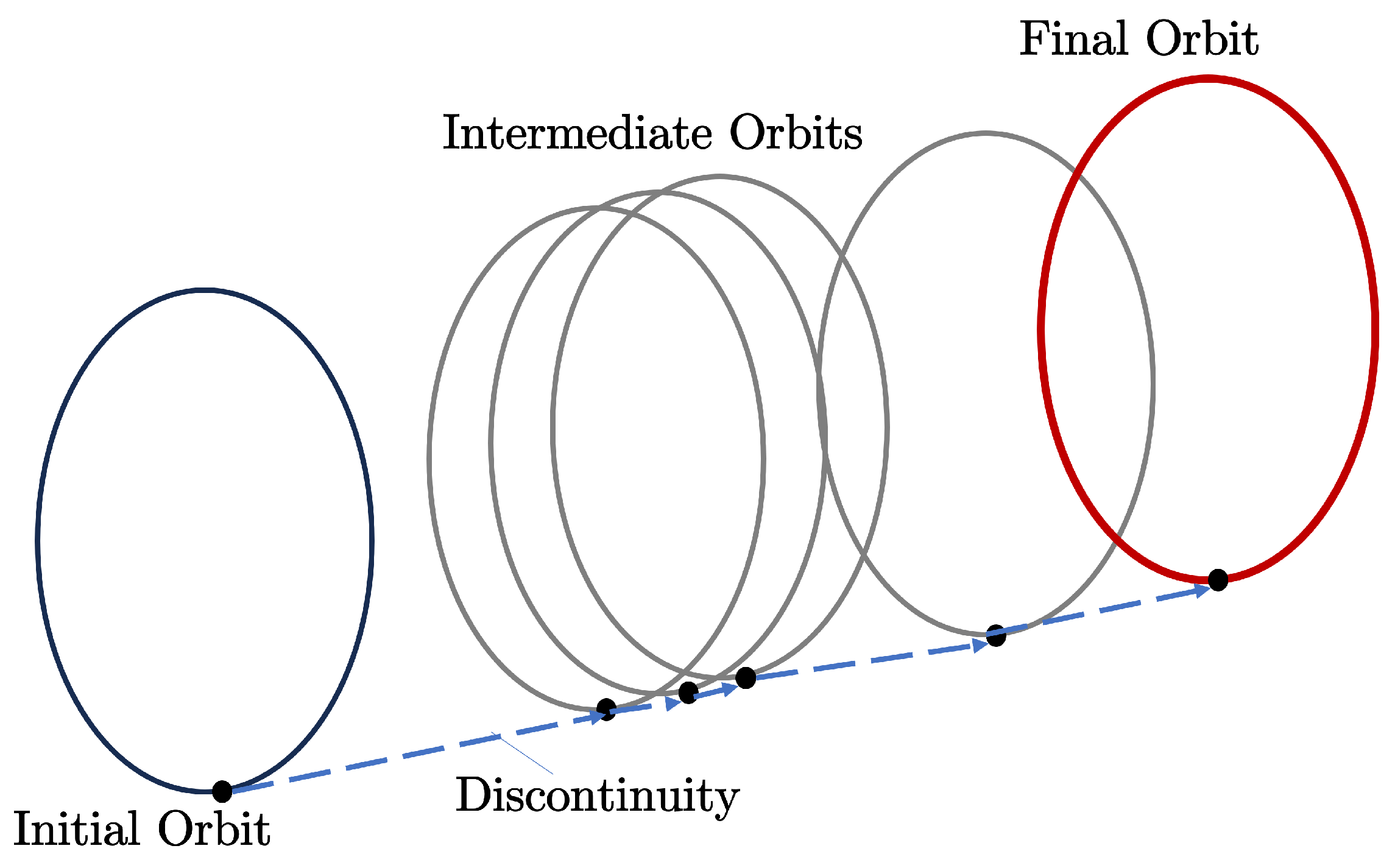
5. Intermediate Orbit Design for Transfers
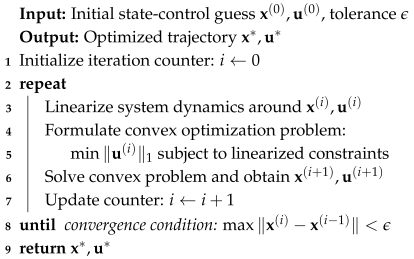
This part introduces the intermediate orbit design methodology for systematically investigating minimum total V planar QSO to 3D-QSO low-thrust transfers. Instead of relying solely on heuristic orbit chains, we construct initial guess sequences using a beam search algorithm adapted to the QSO topology. Unlike our previous application to halo orbits, QSOs exhibit richer bifurcation structures, making naïve sequencing less effective. We generate candidate sequences by evaluating subsets of planar and spatial QSOs, ranking them based on the estimated V of their connecting segments using short propagation arcs. Only the top candidates (beam width) are expanded at each depth, effectively pruning the search space while preserving diverse solution paths.
Each guess is passed to the convex solver as a piecewise arc concatenation, and solutions are retained if they converge within a bounded number of iterations. This framework allows us to explore a broader set of orbit families while keeping computational cost tractable. To build the best possible transfer by utilizing natural dynamics, prospective intermediate orbits are selected from the chosen 1:5 3D-QSO family. Based on the beam search algorithm, the suggested algorithm makes initial guesses for the transfers between a given initial and end orbit and then inserts a candidate orbit into the resulting series of intermediate family members of 1:5 3D-QSOs. The suggested approach has proven to efficiently search for the minimal total V transfer solutions by exploiting the generated initial guesses in the case of halo–halo transfer. The success of the proposed technique is heavily dependent on the evaluation index at each tree depth and this evaluation index is the total V, the difference in V between the first and final orbits.
5.1. Transfer Methodology: Tree-Search Method
The breadth-first and depth-first approaches are widely recognized as the most frequently used tree-search algorithms. The breadth-first (BFS) approach systematically traverses all nodes inside a given tree by exploring each level before proceeding to the next. In contrast, the depth-first (DFS) approach explores each branch as extensively as possible before backtracking. If the search tree involves a loop, the DFS algorithm may become stuck indefinitely, as it may ascend a branch that continually hops between two nodes. Depth-limited search (DLS) is presented to remedy the situation. With this approach, the tree cannot expand beyond a fixed height that is determined beforehand. If the branch is too long, it will eventually be void and be replaced by a new one [
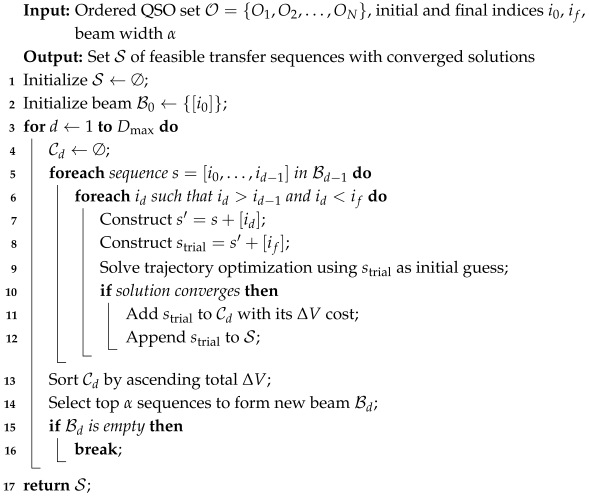
55]. The detailed steps of the beam search process are formalized in Algorithm 2, which systematically expands promising intermediate sequences between the initial and final QSOs. The method maintains a beam of the top sequences at each level based on total, ensuring a balance between computational efficiency and solution diversity.
Table 1 summarizes the notations used throughout the algorithm.
| Algorithm 2: Beam search for intermediate QSO selection. |
![Aerospace 12 00524 i002]() |
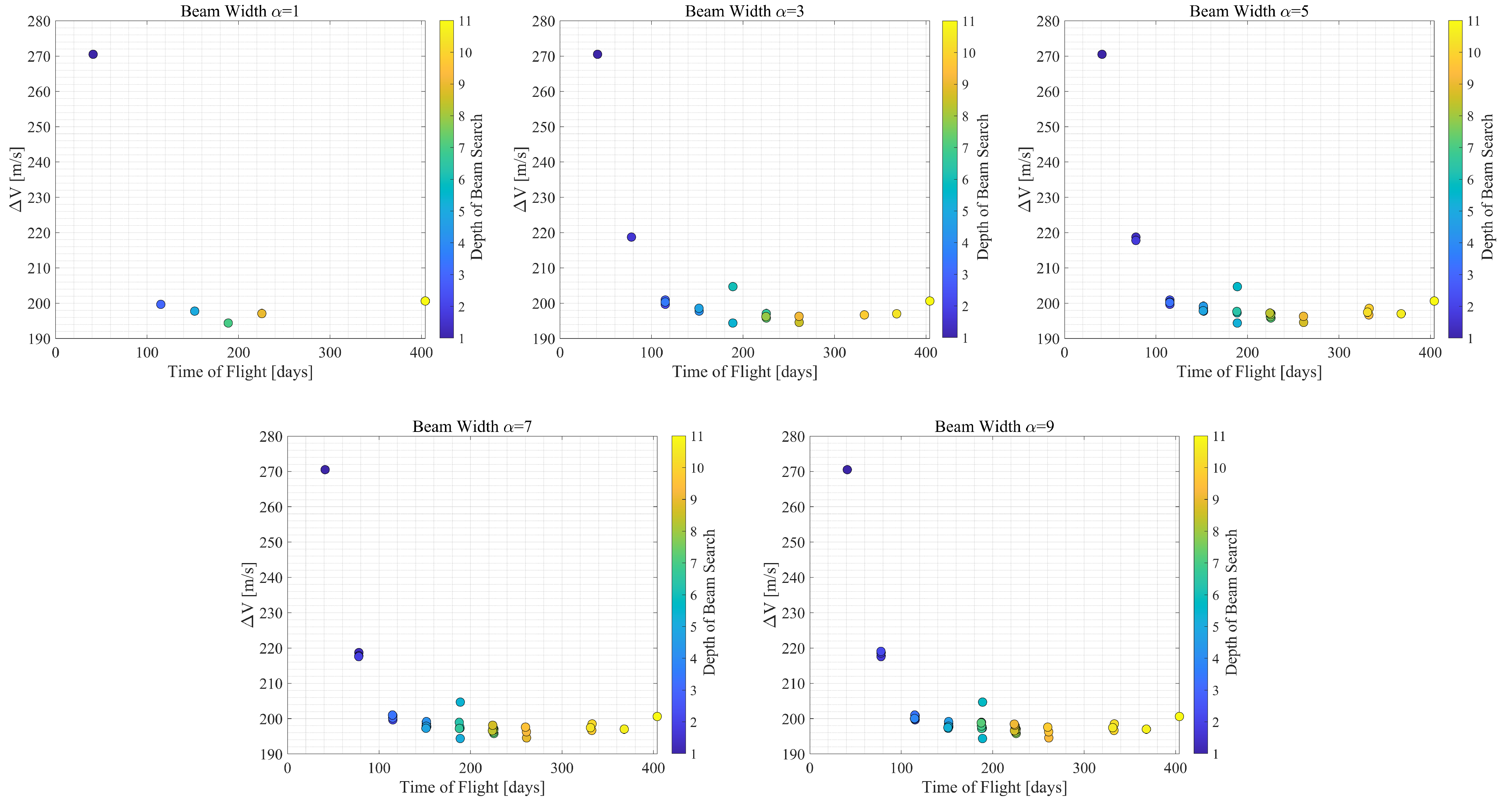
5.2. Beam Search of Intermediate Transfer Orbits
The beam search algorithm is a heuristic approach that shares similarities with the breadth-first search algorithm in its application to optimization problems [
56]. The approach has been implemented in artificial intelligence, complex scheduling, and space engineering [
57]. The distinction between the breadth-first method and the approach described here resides in the selective branching from only the most promising nodes, referred to as beam nodes, at each tree level. The parameter
, known as the beam width, determines the number of nodes to be considered for branching. The computational time required by the beam search technique is comparatively brief due to its ability to significantly reduce the search space by restricting the search to a subset of potential solutions determined by the beam width parameter
.
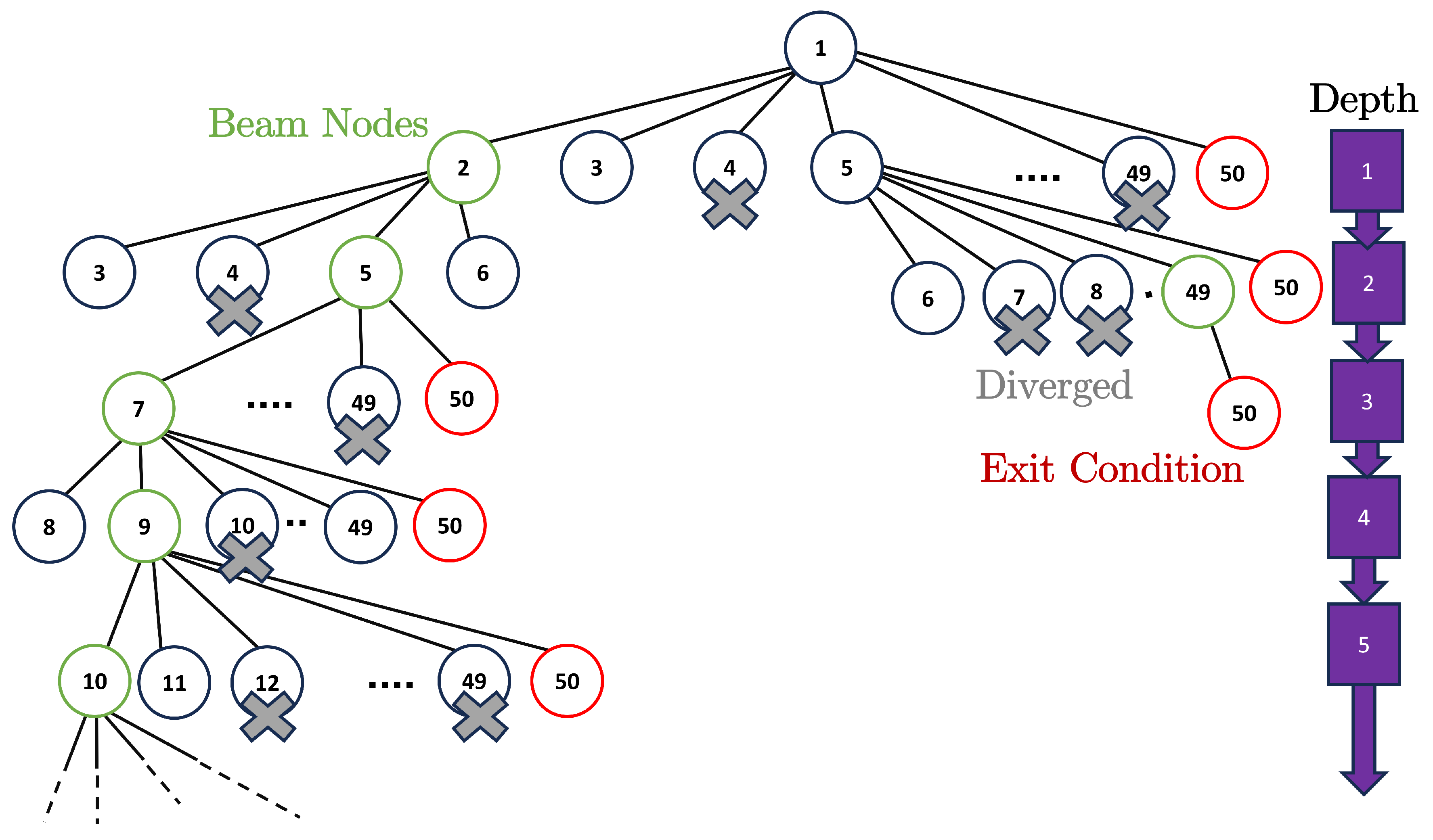
The first step would be the computation and evaluation of the initial guess. To begin the process, a successive convex optimization with initial guesses (i.e.,), in this case, planar QSO at the point of bifurcation and 48 members of 3D-QSO families to connect with the desired final orbit of the 1:5 3D-QSO family and evaluate each node branching out from the planar QSO and estimate the V. The evaluation index is V; that is, the beam nodes are selected from the nodes in ascending order, corresponding to each V. The nodes that do not converge are disregarded, and the exit condition is evaluated (i.e., node 50, the final 3D-QSO). The optimization results and the sequence of the intermediate orbits related to such nodes are stored as local optimal solutions.
The next step would be branching out from beam nodes. To branch out from each beam node, new nodes are generated so that their node number is larger than the node number of the beam node. For example, when , to branch out from the beam node ‘No.5’, the sequence of is evaluated. After dismissing the nodes related to diverged solutions and judging the exit condition, the rest of the nodes are considered by the total V between the planar QSO ‘No.1’ and final 3D-QSO (1:5 family) ‘No. j’ to determine one beam node (the node with the lowest total V) for this tree depth. If no nodes are left after the exit condition evaluation, the calculation along with this phyletic line stops, and the number of beam nodes is reduced in the next tree depth.
The algorithm’s final phase will expand the tree created by the previous step until the number of beam nodes reaches zero. When all calculations have been finished, the optimization results of the nodes that satisfy the exit criterion at each tree depth are compiled, and the initial guess with the lowest total V is found. As a result, the proposed technique can systematically search for a favorable sequence of intermediary 1:5 3D-QSOs along the family’s Jacobi constant curve. The results of this simulation for the case of 1:5 3D-QSO are discussed in the following section. It can be noted that the same approach can be applied to other periodic orbit families in the CRTBP.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}