
Aircraft Routing and Crew Pairing Solutions: Robust Integrated Model Based on Multi-Agent Reinforcement Learning

Abstract
1. Introduction
- (1)
- How can flight connections that are truly vulnerable to disruption be systematically identified using data-driven delay prediction?
- (2)
- How can such predictions be effectively incorporated into a robust and integrated ARP–CPP scheduling model?
- (3)
- Can a learning-based algorithm efficiently generate resilient aircraft and crew schedules under complex operational constraints?
2. Literature Review
2.1. Robust Integrated ARP and CPP

| Paper | Network | Method to Ensure Robustness | Solving Method |
|---|---|---|---|
| Cordeau et al. [22] | TS | Crews follow aircraft on short connections (CFA) | Benders decomposition |
| Mercier et al. [18] | TS | Avoid crew changing aircraft on restricted connections (CFA) | Benders decomposition |
| Weide et al. [23] | SN | Crews follow aircraft on short connections (CFA) | Iterative solution approach |
| Dück et al. [29] | SN | Minimizing the total propagated delay (DA) | Column generation and dynamic programming |
| Dunbar et al. [26] | SN | Minimizing the total propagated delay (DA) | An iterative approach |
| Dunbar et al. [27] | SN | Stochastic versions of Dunbar et al. [26] (DA) | A heuristic algorithm |
| Ruther et al. [24] | CN | Crews follow aircraft on short connections (CFA) | Dive-and-price |
| Ahmed et al. [25] | CN | Reward crews following aircraft; penalize connections that are vulnerable to disruptions (CFA and DA) | CPLEX |
| Cacchiani and Salazar-González [28] | SN | Penalize the expected propagated delay (DA) | Column generation |
| Ahmed et al. [17] | CN | Penalize the connections that are vulnerable to disruptions and connections crew that do not follow aircraft (CFA and DA) | Proximity search algorithm |
| This paper | CN | Improved versions of Ahmed et al. [17] (CFA and DA) | Reinforcement learning |
2.2. Reinforcement Learning in Airline Tactical-Level Planning Problems
3. Robust Integrated Model
3.1. Problem Description
3.2. Description of Notions
- if and only if a maintenance check can be performed between and , and both and are executed the same day by the same aircraft.
- if and only if a maintenance check can be performed between and , and is executed the day after by the same aircraft.
- if and only if a maintenance check cannot be performed between and , and both and are executed the same day by the same aircraft.
- if and only if a maintenance check cannot be performed between and , and is executed the day after i by the same aircraft.
- if and only if the crew that serves family consecutively serves flights and , corresponding to the maximum and minimum layover duration.
- if and only if the crew that serves family consecutively serves flights and , corresponding to the maximum and minimum layover duration.
- The set of short connections.
3.3. Robust Policies for ARP and CPP
3.4. A Nonlinear MIP Formulation for RAC
4. The Proposed Algorithm
4.1. Background
4.2. Formulation of RAC as Markov Decision Process
4.2.1. State Space
4.2.2. Action Space
4.2.3. Reward Function
4.3. Reinforcement Learning-Based Algorithm
Update of Q Value Table
5. Computational Results and Discussion
5.1. Comparison Method
5.2. Data Introduction
5.3. Robust Model Performance
5.3.1. Comparison of Robustness Indicators
- CON1: New critical aircraft connection: The number of CON1s effectively reflects the total number of aircraft connections that are vulnerable to disruption. For each CON1, we can calculate, which reflects the degree of vulnerability to disruptions. If , the aircraft connection could experience a delay of 40 min. Based on the calculated results, we divide CON1 into three intervals—that is, 15–30, 31–60, and more than 60.
- CON2: New critical crew connection: The number of CON2s effectively reflects the total number of crew connections that are vulnerable to disruption. For each new critical aircraft connection, we can calculate, which reflects the degree of vulnerability to disruptions. If , the crew connection could experience a delay of 40 min. Based on the calculated results, we divide CON2 into three intervals—that is, 15–30, 31–60, and more than 60.
- CON3: Connections between crews following aircraft on two consecutive flights.
- Z: Objective function value.
- Delay penalty: Penalty value for an NCC in the objective function. This value represents the degree to which the flight schedule is vulnerable to disruption.
5.3.2. Flight Delay Simulation
5.3.3. Statistical Significance Validation
5.4. Algorithm Performance
6. Conclusions
- (1)
- High-risk flight connections (NCCSs) are identified using a spatiotemporal graph convolutional network (STGCN)-based delay-prediction model;
- (2)
- These predictions are integrated into the integrated ARP and CPP scheduling model via a robustness-oriented objective;
- (3)
- A learning-based approach is shown to generate robust and resilient schedules under complex operational constraints.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1. CPLEX
Appendix A.2. Proximity Search Algorithm
Appendix A.3. Column Generation Algorithm-Based Method
Appendix B
Appendix B.1. Definition of Airport Network
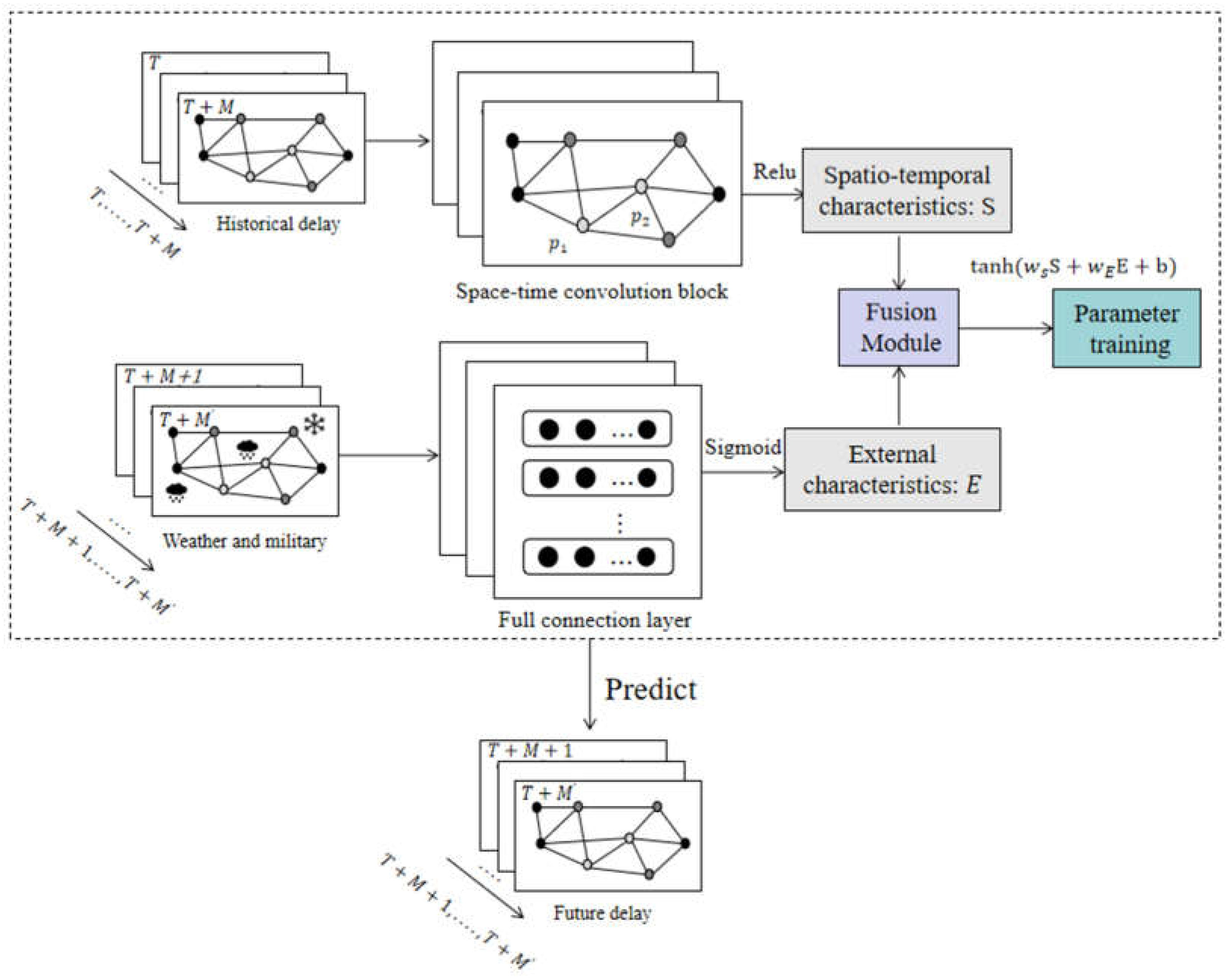
Appendix B.2. Spatiotemporal Convolution Module
Appendix B.3. External Feature Extraction Module
Appendix B.4. Fusion Module
Appendix B.5. Model Validation
| Data Set | Evaluation Metric | Time Window (h) | Historical Mean Method | Random Forest | LSTM Networks | STGCN |
|---|---|---|---|---|---|---|
| Test Case (1) | MAE | 1 | 6.124 | 4.357 | 4.212 | 3.852 |
| 4 | 6.124 | 4.525 | 4.473 | 4.021 | ||
| Test Case (2) | MAE | 1 | 5.965 | 4.124 | 4.027 | 3.783 |
| 4 | 5.965 | 4.253 | 4.224 | 3.971 | ||
| Test Case (3) | MAE | 1 | 5.373 | 3.642 | 3.526 | 3.374 |
| 4 | 5.373 | 3.733 | 3.664 | 3.625 | ||
| Test Case (4) | MAE | 1 | 5.594 | 4.012 | 3.857 | 3.656 |
| 4 | 5.594 | 4.276 | 4.018 | 3.829 | ||
| Test Case (5) | MAE | 1 | 5.923 | 4.124 | 4.002 | 3.798 |
| 4 | 5.923 | 4.398 | 4.215 | 3.865 | ||
| Test Case (6) | MAE | 1 | 5.235 | 3.685 | 3.593 | 3.312 |
| 4 | 5.235 | 3.741 | 3.737 | 3.542 |
| Data Set | Time Window (h) | MAE (min) | % R | |
|---|---|---|---|---|
| STGCN | STGCN-N | |||
| Test Case (1) | 1 | 3.852 | 4.201 | 57.0 |
| 4 | 4.021 | 4.503 | 56.6 | |
| Test Case (2) | 1 | 3.783 | 4.021 | 55.1 |
| 4 | 3.971 | 4.233 | 54.7 | |
| Test Case (3) | 1 | 3.374 | 3.502 | 43.0 |
| 4 | 3.425 | 3.679 | 42.5 | |
| Test Case (4) | 1 | 3.656 | 3.861 | 45.6 |
| 4 | 3.829 | 4.052 | 47.2 | |
| Test Case (5) | 1 | 3.798 | 4.019 | 50.4 |
| 4 | 3.865 | 4.189 | 52.6 | |
| Test Case (6) | 1 | 3.312 | 3.615 | 42.1 |
| 4 | 3.542 | 3.859 | 41.9 | |
Appendix C
Appendix C.1. Aircraft-Routing Constraints
Appendix C.2. Crew-Pairing Constraints
Appendix C.3. Linking Constraints
References
- Xu, Y.; Wandelt, S.; Sun, X. Airline integrated robust scheduling with a variable neighborhood search based heuristic. Transp. Res. Part B Methodol. 2021, 149, 181–203. [Google Scholar] [CrossRef]
- Birolini, S.; Antunes, A.P.; Cattaneo, M.; Malighetti, P.; Paleari, S. Integrated flight scheduling and fleet assignment with improved supply-demand interactions. Transp. Res. Part B Methodol. 2021, 149, 162–180. [Google Scholar] [CrossRef]
- Yan, C.; Barnhart, C.; Vaze, V. Choice-based airline schedule design and fleet assignment: A decomposition approach. Transp. Sci. 2022, 56, 1410–1431. [Google Scholar] [CrossRef]
- Kızıloğlu, K.; Sakallı, Ü.S. Integrating Flight Scheduling, Fleet Assignment, and Aircraft Routing Problems with Codesharing Agreements under Stochastic Environment. Aerospace 2023, 10, 1031. [Google Scholar] [CrossRef]
- Ding, C.; Guo, Y.; Weng, J. Robust Model for Fleet Assignment with Station Purity and Robust Opportunities. In Proceedings of the 2021 9th International Conference on Information Technology: IoT and Smart City, Guangzhou, China, 22–25 December 2021. [Google Scholar]
- Liu, M.; Ding, Y.; Sun, L.; Zhang, R.; Dong, Y.; Zhao, Z.; Wang, Y.; Liu, C. Green Airline-Fleet Assignment with Uncertain Passenger Demand and Fuel Price. Sustainability 2023, 15, 899. [Google Scholar] [CrossRef]
- Khanmirza, E.; Nazarahari, M.; Haghbeigi, M. A heuristic approach for optimal integrated airline schedule design and fleet assignment with demand recapture. Appl. Soft Comput. 2020, 96, 106681. [Google Scholar] [CrossRef]
- Eltoukhy, A.E.; Chan, F.T.; Chung, S.H.; Niu, B.; Wang, X.P. Heuristic approaches for operational aircraft maintenance routing problem with maximum flying hours and man-power availability considerations. Ind. Manag. Data Syst. 2017, 117, 2142–2170. [Google Scholar] [CrossRef]
- Eltoukhy, A.E.; Wang, Z.X.; Chan, F.T.; Chung, S.H.; Ma, H.L.; Wang, X.P. Robust aircraft maintenance routing problem using a turn-around time reduction approach. IEEE Trans. Syst. Man Cybern. Syst. 2019, 50, 4919–4932. [Google Scholar] [CrossRef]
- Birolini, S.; Jacquillat, A. Day-ahead aircraft routing with data-driven primary delay predictions. Eur. J. Oper. Res. 2023, 310, 379–396. [Google Scholar] [CrossRef]
- Akıncılar, A.; Güner, E. A new tool for robust aircraft routing: Superior Robust Aircraft Routing (sup-RAR). J. Air Transp. Manag. 2025, 124, 102744. [Google Scholar] [CrossRef]
- Wen, X.; Chung, S.H.; Choi, T.M.; Fu, X. Airline cabin crew pairing with accurate characterization of cross-class substitution: A branch-and-price approach. Transp. Res. Part B Methodol. 2024, 190, 103084. [Google Scholar] [CrossRef]
- Ding, C.; Chen, X.; Wu, W.; Wei, W.; Xin, Z. Game-theoretic analysis of the impact of crew overnight hotel cost on airlines’ fleet assignment and crew pairing. J. Air Transp. Manag. 2023, 113, 102491. [Google Scholar] [CrossRef]
- Zeren, B.; Özcan, E.; Deveci, M. An adaptive greedy heuristic for large scale airline crew pairing problems. J. Air Transp. Manag. 2024, 114, 102492. [Google Scholar] [CrossRef]
- Cacchiani, V.; Salazar-González, J.J. Optimal solutions to a real-world integrated airline scheduling problem. Transp. Sci. 2017, 51, 250–268. [Google Scholar] [CrossRef]
- Shao, S.; Sherali, H.D.; Haouari, M. A novel model and decomposition approach for the integrated airline fleet assignment, aircraft routing, and crew pairing problem. Transp. Sci. 2017, 51, 233–249. [Google Scholar] [CrossRef]
- Ahmed, M.B.; Hryhoryeva, M.; Hvattum, L.M.; Haouari, M. A matheuristic for the robust integrated airline fleet assignment, aircraft routing, and crew pairing problem. Comput. Oper. Res. 2023, 137, 105551. [Google Scholar] [CrossRef]
- Mercier, A.; Cordeau, J.F.; Soumis, F. A computational study of Benders decomposition for the integrated aircraft routing and crew scheduling problem. Comput. Oper. Res. 2005, 32, 1451–1476. [Google Scholar] [CrossRef]
- Yan, C.; Kung, J. Robust aircraft routing. Transp. Sci. 2018, 52, 118–133. [Google Scholar] [CrossRef]
- Ma, H.L.; Sun, Y.; Chung, S.H.; Chan, H.K. Tackling uncertainties in aircraft maintenance routing: A review of emerging technologies. Transp. Res. Part E Logist. Transp. Rev. 2022, 164, 102805. [Google Scholar] [CrossRef]
- Wen, X.; Ma, H.L.; Chung, S.H.; Khan, W.A. Robust airline crew scheduling with flight flying time variability. Transp. Res. Part E Logist. Transp. Rev. 2020, 144, 102132. [Google Scholar] [CrossRef]
- Cordeau, J.F.; Stojković, G.; Soumis, F.; Desrosiers, J. Benders decomposition for simultaneous aircraft routing and crew scheduling. Transp. Sci. 2001, 35, 375–388. [Google Scholar] [CrossRef]
- Weide, O.; Ryan, D.; Ehrgott, M. An iterative approach to robust and integrated aircraft routing and crew scheduling. Comput. Oper. Res. 2010, 37, 833–844. [Google Scholar] [CrossRef]
- Ruther, S.; Boland, N.; Engineer, F.G.; Evans, I. Integrated aircraft routing, crew pairing, and tail assignment: Branch-and-price with many pricing problems. Transp. Sci. 2017, 51, 177–195. [Google Scholar] [CrossRef]
- Ahmed, M.B.; Mansour, F.Z.; Haouari, M. Robust integrated maintenance aircraft routing and crew pairing. J. Air Transp. Manag. 2018, 73, 15–31. [Google Scholar] [CrossRef]
- Dunbar, M.; Froyland, G.; Wu, C.L. Robust airline schedule planning: Minimizing propagated delay in an integrated routing and crewing framework. Transp. Sci. 2012, 46, 204–216. [Google Scholar] [CrossRef]
- Dunbar, M.; Froyland, G.; Wu, C.L. An integrated scenario-based approach for robust aircraft routing, crew pairing and re-timing. Comput. Oper. Res. 2014, 45, 68–86. [Google Scholar] [CrossRef]
- Cacchiani, V.; Salazar-González, J.J. Heuristic approaches for flight retiming in an integrated airline scheduling problem of a regional carrier. Omega 2020, 91, 102028. [Google Scholar] [CrossRef]
- Dück, V.; Ionescu, L.; Kliewer, N.; Suhl, L. Increasing stability of crew and aircraft schedules. Transp. Res. Part C Emerg. Technol. 2012, 20, 47–61. [Google Scholar] [CrossRef]
- Ruan, J.H.; Wang, Z.X.; Chan, F.T.; Patnaik, S.; Tiwari, M.K. A reinforcement learning-based algorithm for the aircraft maintenance routing problem. Expert Syst. Appl. 2021, 169, 114399. [Google Scholar] [CrossRef]
- Hu, Y.; Miao, X.; Zhang, J.; Liu, J.; Pan, E. Reinforcement learning-driven maintenance strategy: A novel solution for long-term aircraft maintenance decision optimization. Comput. Ind. Eng. 2021, 153, 107056. [Google Scholar] [CrossRef]
- Li, Y.; Wang, X.; Kang, Q.; Fan, Z.; Yao, S. An MCTS-Based Solution Approach to Solve Large-Scale Airline Crew Pairing Problems. IEEE Trans. Intell. Transp. Syst. 2023, 24, 5477–5488. [Google Scholar] [CrossRef]
- Thakkar, D.; Palaniappan, B. Aircraft routing using dynamic programming and reinforcement learning: A customer-centric approach. J. Air Transp. Res. Soc. 2024, 2, 100018. [Google Scholar] [CrossRef]
- Yuan, J.; Pei, Y.; Xu, Y.; Ge, Y.; Wei, Z. Autonomous interval management of multi-aircraft based on multi-agent reinforcement learning considering fuel consumption. Transp. Res. Part C Emerg. Technol. 2024, 165, 104729. [Google Scholar] [CrossRef]
- Lee, J.; Lee, K.; Moon, I. A reinforcement learning approach for multi-fleet aircraft recovery under airline disruption. Appl. Soft Comput. 2022, 129, 109556. [Google Scholar] [CrossRef]
- Li, H.; Wu, X.; Ribeiro, M.; Santos, B.; Zheng, P. Deep reinforcement learning approach for real-time airport gate assignment. Oper. Res. Perspect. 2025, 14, 100338. [Google Scholar] [CrossRef]
- Eltoukhy, A.E.; Wang, Z.X.; Shaban, I.A.; Chan, F.T. Coordinating aircraft maintenance routing and integrated maintenance staffing and rostering: A Stackelberg game theoretical model. Int. J. Prod. Res. 2022, 60, 7450–7474. [Google Scholar] [CrossRef]
- Haouari, M.; Shao, S.; Sherali, H.D. A lifted compact formulation for the daily aircraft maintenance routing problem. Transp. Sci. 2013, 47, 508–525. [Google Scholar] [CrossRef]
- Sanchez, D.T.; Boyacı, B.; Zografos, K.G. An optimisation framework for airline fleet maintenance scheduling with tail assignment considerations. Transp. Res. Part B Methodol. 2020, 133, 142–164. [Google Scholar] [CrossRef]
- Haouari, M.; Zeghal Mansour, F.; Sherali, H.D. A new compact formulation for the daily crew pairing problem. Transp. Sci. 2019, 53, 811–828. [Google Scholar] [CrossRef]
- AhmadBeygi, S.; Cohn, A.; Guan, Y.; Belobaba, P. Analysis of the potential for delay propagation in passenger airline networks. J. Air Transp. Manag. 2008, 14, 221–236. [Google Scholar] [CrossRef]
- GiGiannikas, V.; Ledwoch, A.; Stojković, G.; Costas, P.; Brintrup, A.; Al-Ali, A.A.S.; Chauhan, V.K.; McFarlane, D. A data-driven method to assess the causes and impact of delay propagation in air transportation systems. Transp. Res. Part C Emerg. Technol. 2022, 143, 103862. [Google Scholar] [CrossRef]
- Dück, V. Increasing Stability of Aircraft and Crew Schedules. Ph.D. Thesis, Paderborn University, Paderborn, Germany, 2010. [Google Scholar]
- Moerland, T.M.; Broekens, J.; Plaat, A.; Jonker, C.M. Model-based reinforcement learning: A survey. Found. Trends Mach. Learn. 2023, 16, 1–118. [Google Scholar] [CrossRef]
- Szepesvári, C. Algorithms for Reinforcement Learning; Springer Nature: Berlin/Heidelberg, Germany, 2022. [Google Scholar]
- Liu, Y.; Chen, Y.; Jiang, T. Dynamic selective maintenance optimization for multi-state systems over a finite horizon: A deep reinforcement learning approach. Eur. J. Oper. Res. 2020, 283, 166–181. [Google Scholar] [CrossRef]
- Bennett, A.; Kallus, N. Proximal reinforcement learning: Efficient off-policy evaluation in partially observed markov decision processes. Oper. Res. 2023, 72, 1071–1086. [Google Scholar] [CrossRef]
- Lee, H.R.; Lee, T. Multi-agent reinforcement learning algorithm to solve a partially-observable multi-agent problem in disaster response. Eur. J. Oper. Res. 2021, 291, 296–308. [Google Scholar] [CrossRef]
- Aloulou, M.A.; Haouari, M.; Mansour, F.Z. A model for enhancing robustness of aircraft and passenger connections. Transp. Res. Part C Emerg. Technol. 2013, 32, 48–60. [Google Scholar] [CrossRef]
- Rebollo, J.J.; Balakrishnan, H. Characterization and prediction of air traffic delays. Transp. Res. Part C Emerg. Technol. 2014, 44, 231–241. [Google Scholar] [CrossRef]
- Gui, G.; Liu, F.; Sun, J.; Yang, J.; Zhou, Z.; Zhao, D. Flight delay prediction based on aviation big data and machine learning. IEEE Trans. Veh. Technol. 2019, 69, 140–150. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



| Sets | |
| Set of the airport, indexed by | |
| Set of maintenance stations for aircraft of type , indexed by | |
| Set of legs, indexed by or | |
| Set of legs that will be served by an aircraft of type , indexed by or | |
| Set of legs that will be served by an aircraft of family , indexed by or | |
| A dummy node set of type /family representing the base where aircraft rotation or crew pairing starts, indexed by 0 | |
| A dummy node set of type /family representing the base where aircraft rotation or crew pairing terminates, indexed by 0 | |
| Parameters | |
| The corresponding flying time of flight | |
| The departure station of flight | |
| The arrival station of flight | |
| The departure time of flight (in minutes) | |
| The arrival time of flight (in minutes) | |
| The time needed to perform the maintenance for aircraft of type | |
| Minimum turn time of aircraft of type | |
| Number of available aircraft of type | |
| Maximum flying time between two consecutive maintenance checks of type | |
| Maximum times of take-offs between two consecutive maintenance checks of type | |
| Maximum number of calendar days between two consecutive maintenance checks of type | |
| Decision variables | |
| Binary variable that equals one if arc is selected, and 0 otherwise | |
| Total accumulated flying hours for an aircraft since its last maintenance check after serving flight | |
| Total accumulated times of take-offs and landings for an aircraft since its last maintenance check after serving flight | |
| Total accumulated number of calendar days for an aircraft since its last maintenance check after serving flight | |
| Parameters | |
| Maximum and minimum sit-time between two consecutive flights | |
| Maximum and minimum layover duration between two consecutive flights | |
| Denoting the sit-time for crew if and only if | |
| Denoting the layover time for crew if and only if | |
| Number of available crews qualified to serve family | |
| Maximum flying time within a duty | |
| Maximum number of take-offs within a duty | |
| Maximum duty duration | |
| Maximum number of duties within a pairing | |
| Minimum/maximum time away from the base of a pairing | |
| Decision variables | |
| Binary variable that equals one if is selected, and zero otherwise | |
| Binary variable that equals one if crew serves the same aircraft on two consecutively flights and , and zero otherwise | |
| Total accumulated duty flight duration for a crew since its last layover after serving flight | |
| Total accumulated number of take-offs and landings for the crew since its last layover after serving flight | |
| Total accumulated duty duration for a crew since its last layover after serving flight | |
| Total accumulated number of duties for a crew since its last layover after serving flight | |
| Total accumulated time away from base for a crew since its last layover after serving flight | |
| Instance | Aircraft | Short Connection | |||
|---|---|---|---|---|---|
| Family | Aircraft Type | Aircraft | Flights | ||
| Instance I | A320 | A320 | 8 | 40 | 5 |
| Total | 1 | 1 | 8 | 40 | 5 |
| Instance II | A320 | A320 | 12 | 110 | 24 |
| BAE | BAE200 | 5 | 53 | 9 | |
| Total | 2 | 2 | 17 | 162 | 33 |
| Instance III | F100 | F100 | 18 | 99 | 33 |
| ERJ170 | ERJ170 | 6 | 39 | 10 | |
| ERJ190 | 10 | 82 | 12 | ||
| A320 | A320 | 32 | 456 | 90 | |
| Total | 3 | 4 | 66 | 676 | 145 |
| Instance IV | ERJ145 | ERJ135 | 5 | 36 | 9 |
| ERJ145 | 8 | 78 | 6 | ||
| CRJ | CRJ100 | 7 | 72 | 9 | |
| CRJ700 | 5 | 42 | 6 | ||
| BAE | BAE200 | 5 | 39 | 9 | |
| BAE300 | 5 | 72 | 4 | ||
| A320 | A319 | 30 | 312 | 64 | |
| A320 | 42 | 477 | 123 | ||
| A321 | 12 | 111 | 6 | ||
| Total | 4 | 9 | 119 | 1239 | 236 |
| Model | CPU (s.) | CON1 | CON1 (15–30) | CON1 (31–60) | CON1 (>60) | CON2 | CON2 (15–30) | CON2 (31–60) | CON2 (>60) | CON3 | Z | % GAP | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Instance I | Model I | 7.4 | 7 | 5 | 2 | 0 | 19 | 10 | 9 | 0 | 5 | −13,535 | 0 |
| Model II | 8.1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 5 | 2500 | 0 | |
| Instance II | Model I | 261.2 | 20 | 15 | 5 | 0 | 32 | 22 | 10 | 0 | 86 | 18,393 | 0 |
| Model II | 253.3 | 2 | 2 | 0 | 0 | 1 | 1 | 0 | 0 | 92 | 45,614 | 0 | |
| Instance III | Model I | * | * | * | * | * | * | * | * | * | * | * | * |
| Model II | * | * | * | * | * | * | * | * | * | * | * | * | |
| Instance IV | Model I | * | * | * | * | * | * | * | * | * | * | * | * |
| Model II | * | * | * | * | * | * | * | * | * | * | * | * |
| Model | CPU (s.) | CON1 | CON1 (15–30) | CON1 (31–60) | CON1 (>60) | CON2 | CON2 (15–30) | CON2 (31–60) | CON2 (>60) | CON3 | Z | % GAP | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Instance I | Model I | 1.1 | 7 | 5 | 2 | 0 | 19 | 10 | 9 | 0 | 5 | −13,535 | 0 |
| Model II | 0.9 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 5 | 2500 | 0 | |
| Instance II | Model I | 7.3 | 20 | 15 | 5 | 0 | 32 | 22 | 10 | 0 | 86 | 18,393 | 0 |
| Model II | 7.5 | 2 | 2 | 0 | 0 | 1 | 1 | 0 | 0 | 92 | 45,614 | 0 | |
| Instance III | Model I | 278.3 | 29 | 15 | 14 | 0 | 30 | 19 | 11 | 0 | 302 | 114,242 | 1.35 |
| Model II | 281.2 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 325 | 161,275 | 1.74 | |
| Instance IV | Model I | 8750.2 | 186 | 64 | 91 | 31 | 252 | 84 | 120 | 48 | 782 | 153,180 | 3.74 |
| Model II | 8545.7 | 106 | 36 | 44 | 26 | 73 | 13 | 40 | 20 | 807 | 420,798 | 3.21 |
| Model | CPU (s.) | CON1 | CON1 (15–30) | CON1 (31–60) | CON1 (>60) | CON2 | CON2 (15–30) | CON2 (31–60) | CON2 (>60) | CON3 | Z | % GAP | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Instance I | Model I | 27.1 | 7 | 5 | 2 | 0 | 19 | 10 | 9 | 0 | 5 | −13,535 | 0 |
| Model II | 29.3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 5 | 2500 | 0 | |
| Instance II | Model I | 1422.4 | 20 | 14 | 6 | 0 | 33 | 25 | 8 | 0 | 85 | 18,017 | 0.20 |
| Model II | 1602.5 | 2 | 2 | 0 | 0 | 1 | 1 | 0 | 0 | 92 | 45,614 | 0 | |
| Instance III | Model I | 7947.1 | 29 | 16 | 13 | 0 | 29 | 18 | 11 | 0 | 299 | 109,233 | 5.66 |
| Model II | 8204.6 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 323 | 155,663 | 5.13 | |
| Instance IV | Model I | 31,002.5 | 185 | 65 | 89 | 31 | 256 | 90 | 121 | 45 | 775 | 139,521 | 12.20 |
| Model II | 33,473.7 | 108 | 40 | 42 | 26 | 72 | 15 | 38 | 19 | 801 | 409,235 | 5.77 |
| Model | CPU (s.) | CON1 | CON1 (15–30) | CON1 (31–60) | CON1 (>60) | CON2 | CON2 (15–30) | CON2 (31–60) | CON2 (>60) | CON3 | Z | % GAP | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Instance I | Model I | 20.0 | 7 | 5 | 2 | 0 | 19 | 10 | 9 | 0 | 5 | −13,535 | 0 |
| Model II | 23.3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 5 | 2500 | 0 | |
| Instance II | Model I | 105.2 | 20 | 15 | 5 | 0 | 32 | 22 | 10 | 0 | 86 | 18,393 | 0 |
| Model II | 117.2 | 2 | 2 | 0 | 0 | 1 | 1 | 0 | 0 | 92 | 45,614 | 0 | |
| Instance III | Model I | >60,000 | 29 | 15 | 14 | 0 | 30 | 19 | 11 | 0 | 302 | 115,784 | 0 |
| Model II | >60,000 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 326 | 164,081 | 0 | |
| Instance IV | Model I | * | * | * | * | * | * | * | * | * | * | * | * |
| Model II | * | * | * | * | * | * | * | * | * | * | * | * |
| CON1 | CON1 | CON1 | CON1 | CON2 | CON2 | CON2 | CON2 | CON3 | Delay Penalty | |
|---|---|---|---|---|---|---|---|---|---|---|
| (15–30) | (31–60) | (>60) | (15–30) | (31–60) | (>60) | |||||
| Minimum deviation (%) | 43.01 | 43.75 | 51.65 | 16.13 | 71.03 | 84.52 | 66.67 | 58.33 | −7.90 | 52.40 |
| Maximum deviation (%) | 100 | 100 | 100 | 16.13 | 100 | 100 | 100 | 58.33 | 0 | 100 |
| Average deviation (%) | 54.96 | 61.62 | 59.82 | 16.13 | 77.78 | 89.63 | 73.33 | 58.33 | −4.60 | 58.82 |
| Metric | Test Method | p-Value | Mean Difference (Model II–Model I) | Effect Size (r) | Significance (α = 0.05) |
|---|---|---|---|---|---|
| PD | Wilcoxon signed-rank | <0.001 | −527.3 | 0.92 | Yes |
| CON1 | Wilcoxon signed-rank | 0.001 | −34.5 | 0.58 | Yes |
| CON2 | Wilcoxon signed-rank | <0.001 | −51.2 | 0.85 | Yes |
| CON3 | Wilcoxon signed-rank | <0.001 | +24.6 | 0.88 | Yes |
| CPU (s.) | Model I | Model II | ||||||
|---|---|---|---|---|---|---|---|---|
| Instance I | Instance II | Instance III | Instance IV | Instance I | Instance II | Instance III | Instance IV | |
| CPLEX | 7.4 | 261.2 | * | * | 8.1 | 253.3 | * | * |
| RL | 1.1 | 7.3 | 278.3 | 8750.2 | 0.9 | 7.5 | 281.2 | 8545.7 |
| PSA | 27.1 | 1422.4 | 7947.1 | 31,002.5 | 29.3 | 1602.5 | 8204.6 | 33,473.7 |
| CG-B | 20 | 105.2 | >60,000 | * | 23.3 | 117.2 | >60,000 | * |
| % GAP | Model I | Model II | ||||||
|---|---|---|---|---|---|---|---|---|
| Instance I | Instance II | Instance III | Instance IV | Instance I | Instance II | Instance III | Instance IV | |
| CPLEX | 0 | 0 | * | * | 0 | 0 | * | * |
| RL | 0 | 0 | 1.35 | 3.74 | 0 | 0 | 1.74 | 3.21 |
| PSA | 0 | 0.20 | 5.66 | 12.20 | 0 | 0 | 5.13 | 5.77 |
| CG-B | 0 | 0 | 0 | * | 0 | 0 | 0 | * |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, C.; Guo, Y.; Jiang, J.; Wei, W.; Wu, W. Aircraft Routing and Crew Pairing Solutions: Robust Integrated Model Based on Multi-Agent Reinforcement Learning. Aerospace 2025, 12, 444. https://doi.org/10.3390/aerospace12050444
Ding C, Guo Y, Jiang J, Wei W, Wu W. Aircraft Routing and Crew Pairing Solutions: Robust Integrated Model Based on Multi-Agent Reinforcement Learning. Aerospace. 2025; 12(5):444. https://doi.org/10.3390/aerospace12050444
Chicago/Turabian StyleDing, Chengjin, Yuzhen Guo, Jianlin Jiang, Wenbin Wei, and Weiwei Wu. 2025. "Aircraft Routing and Crew Pairing Solutions: Robust Integrated Model Based on Multi-Agent Reinforcement Learning" Aerospace 12, no. 5: 444. https://doi.org/10.3390/aerospace12050444
APA StyleDing, C., Guo, Y., Jiang, J., Wei, W., & Wu, W. (2025). Aircraft Routing and Crew Pairing Solutions: Robust Integrated Model Based on Multi-Agent Reinforcement Learning. Aerospace, 12(5), 444. https://doi.org/10.3390/aerospace12050444