



Robust MPS-INS UKF Integration and SIR-Based Hyperparameter Estimation in a 3D Flight Environment


Abstract
1. Introduction
2. Sensor Integration MPS/INS
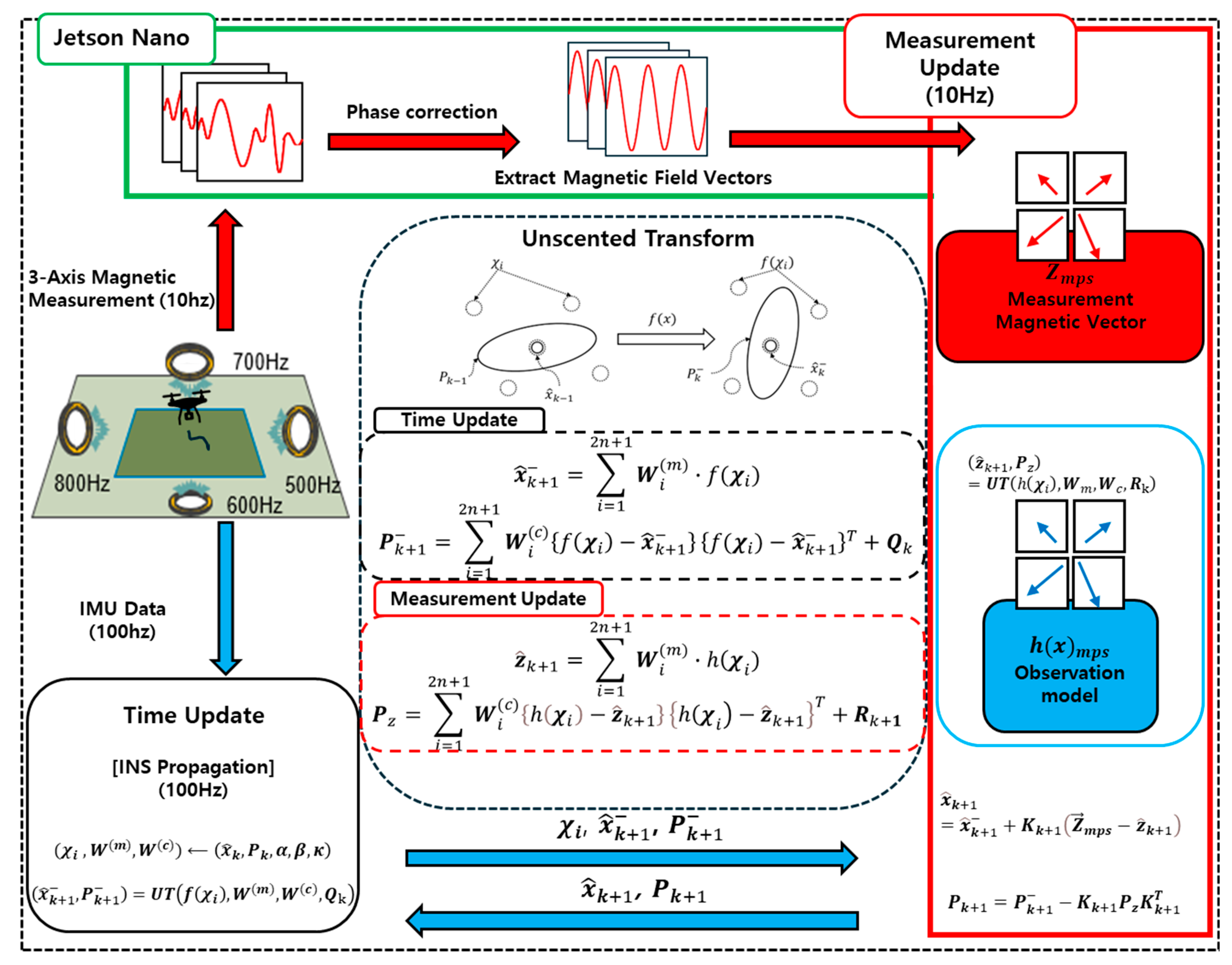
2.1. Measurement Description and UKF Tightly Coupled Integration
2.2. Estimation of UKF Hyperparameters Using the SIR Process
| Algorithm 1: PDF Calculation |
| 1: Compute the Probability Density Function (PDF) for measurement update in SIR-UKF: 2: Return the computed |
The terms are defined as follows:
|
| Algorithm 2: SIR-UKF | ||||||
| 1: | for | do | ||||
| 2: | Distribute hyperparameter | |||||
| 3: | ||||||
| 4: | Start UT using distributed | |||||
| 5: | for | do | ||||
| 6: | ||||||
| 7: | Check the Measurement Synchronization (Sync) | |||||
| 8: | if | then | ||||
| 9: | ||||||
| 10: | else | |||||
| 11: | Calculate using Measurement and Observation model | |||||
| 12: | ||||||
| 13: | if | then | ||||
| 14: | ||||||
| 15: | end if | |||||
| 16: | end if | |||||
| 17: | end for | |||||
| 18: | Resampling and save hyperparameter | |||||
| 19: | Go back to | |||||
| 20: | end for | |||||
3. Magnetic Vector Error Analysis During Flight
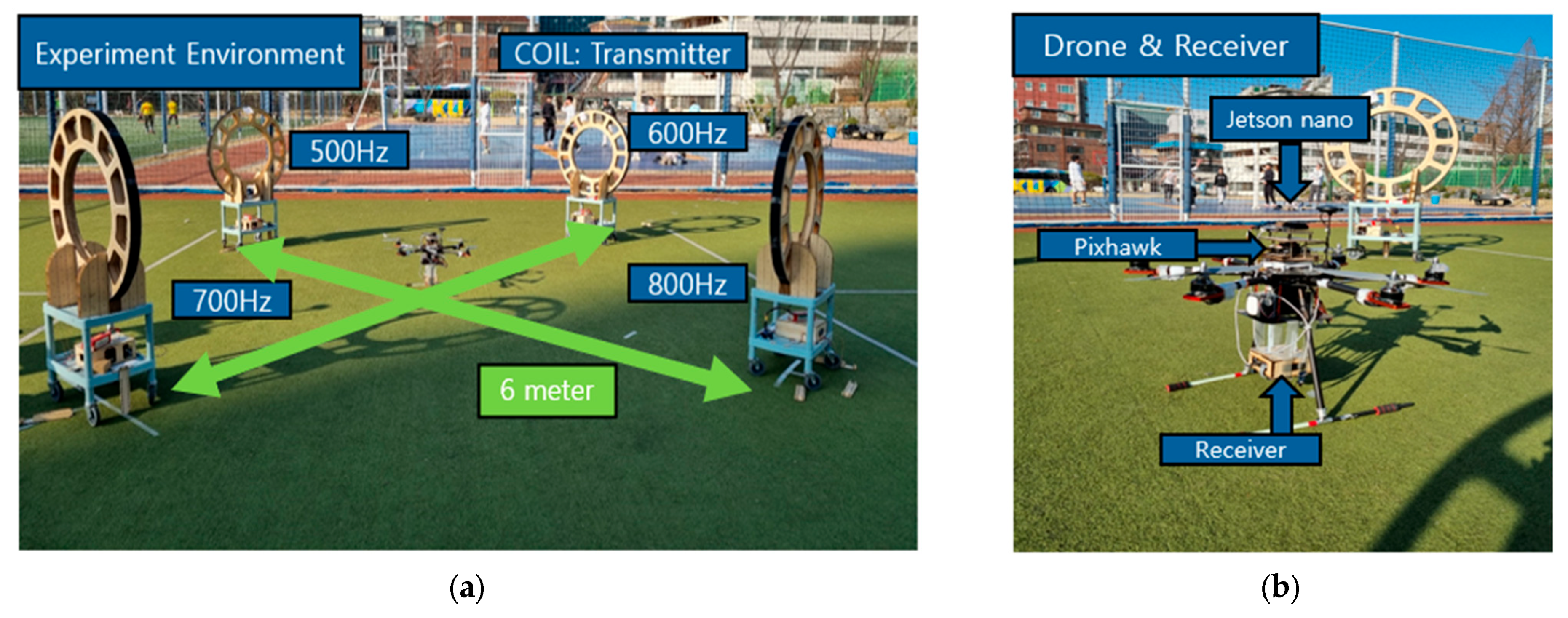
3.1. Experimental Environment
3.2. Experimental Details
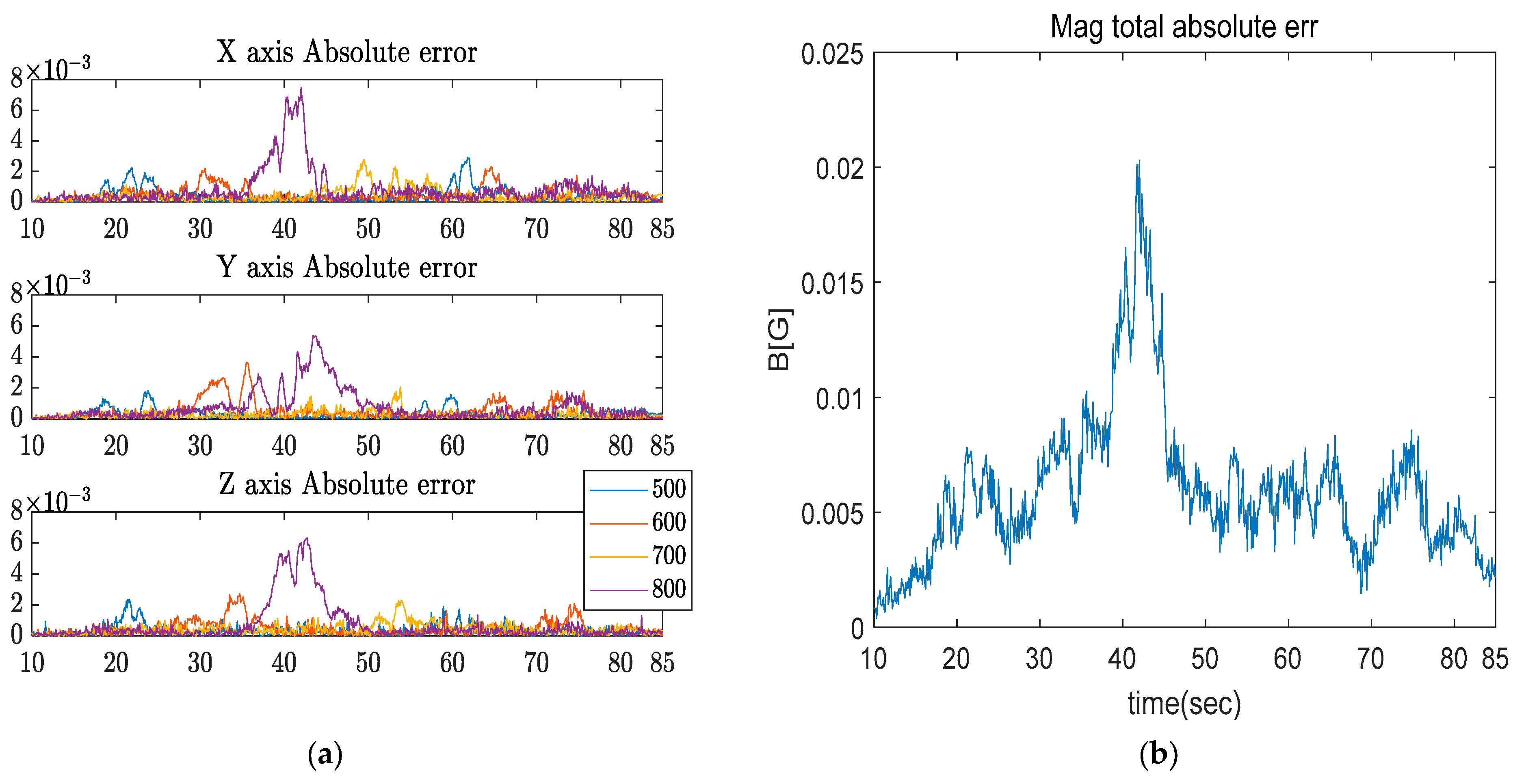
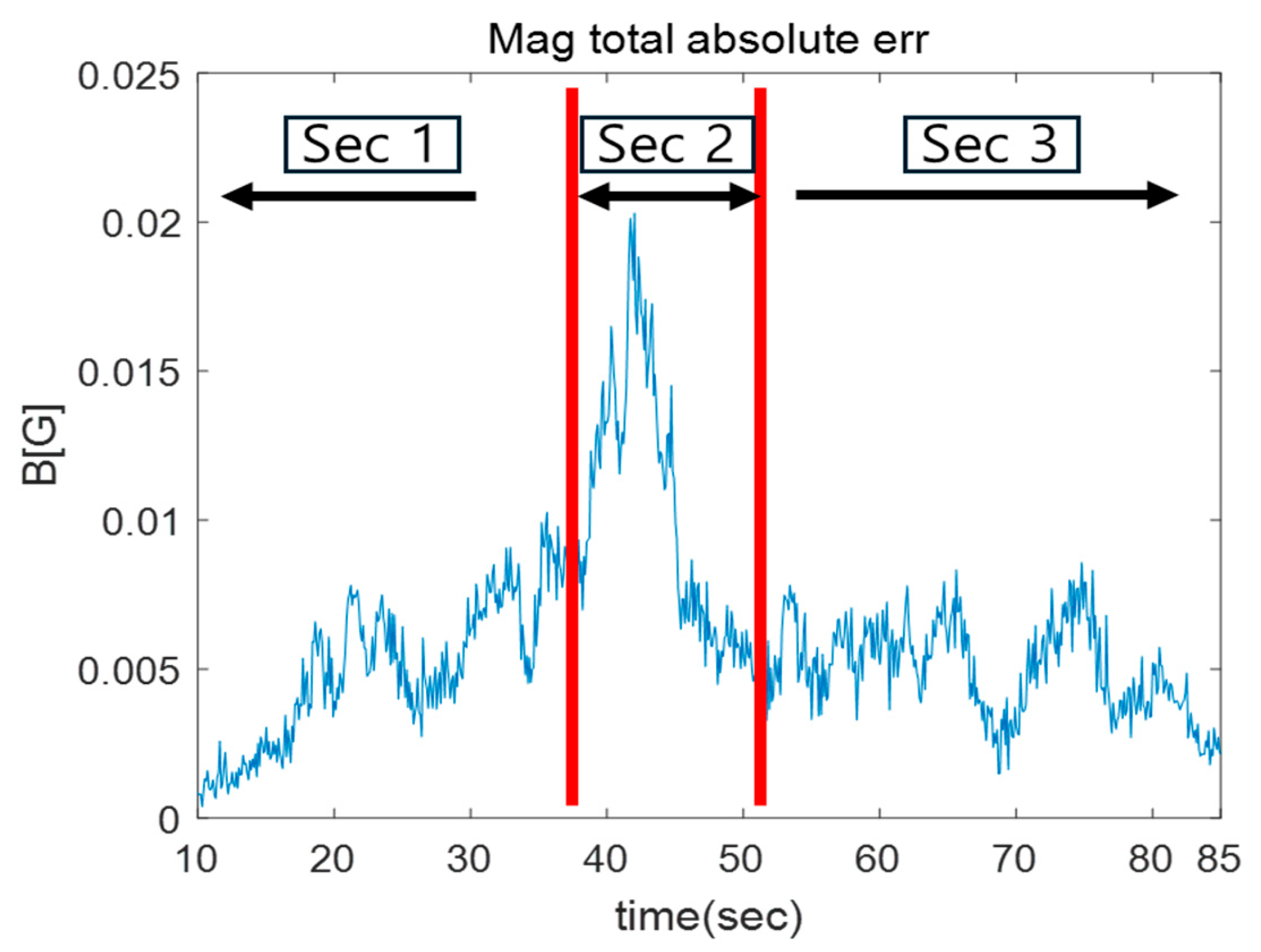
3.2.1. Data with Rapidly Increasing Model Uncertainty
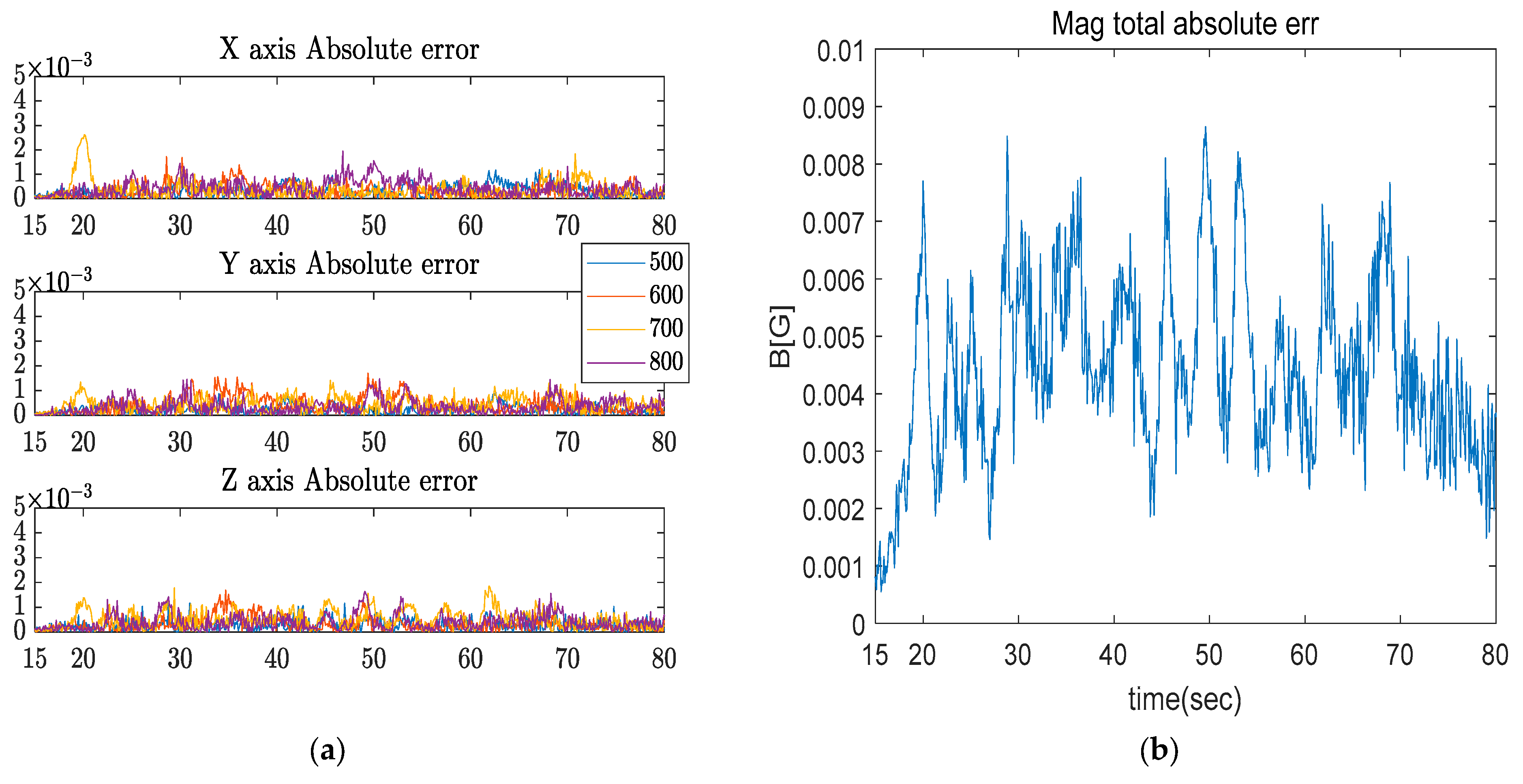
3.2.2. Data with Repeated Model Uncertainty
4. Navigation Results
4.1. Experiment Results
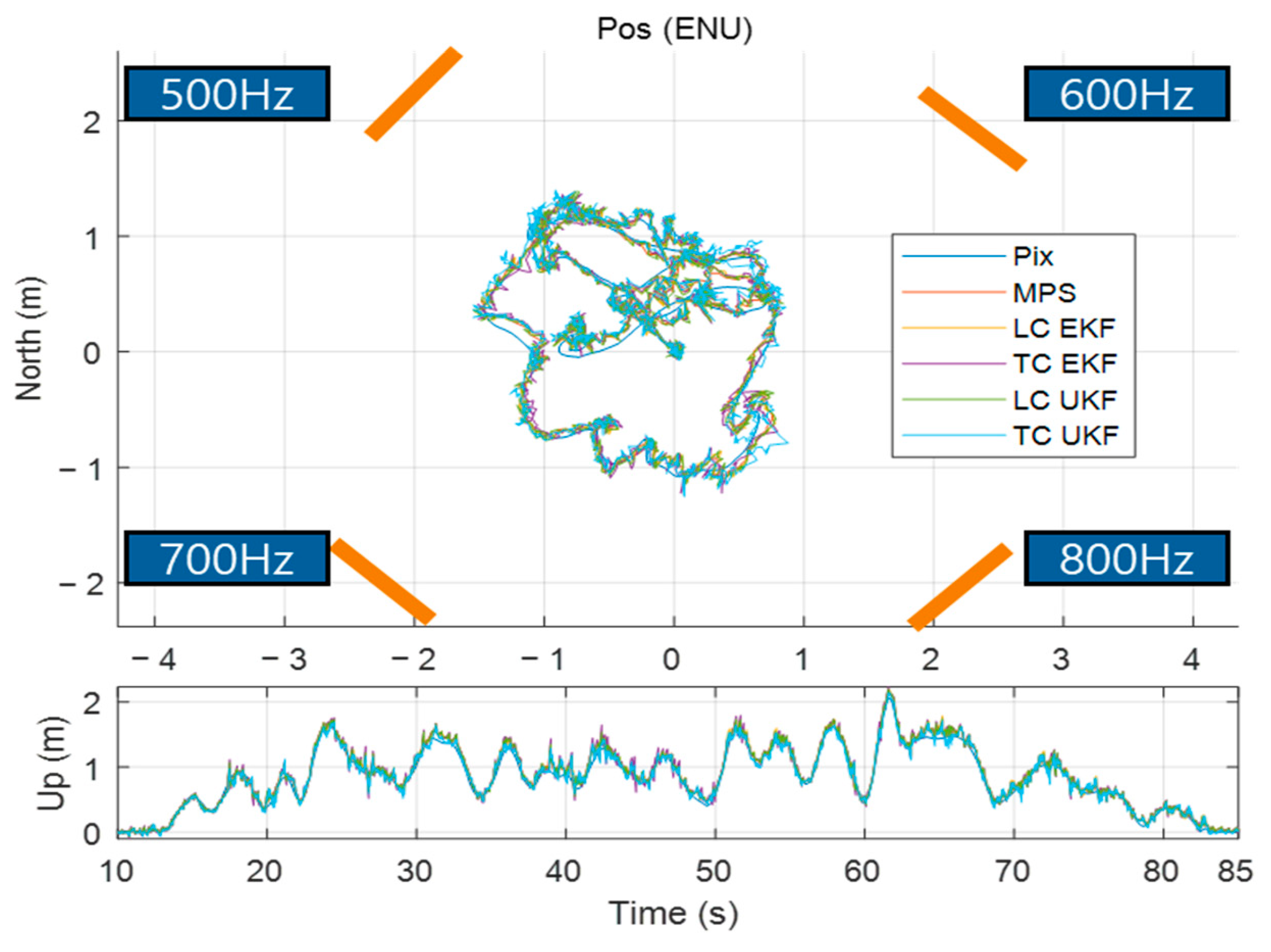
4.1.1. Results for Data with Rapidly Increasing Model Uncertainty (Set 1)
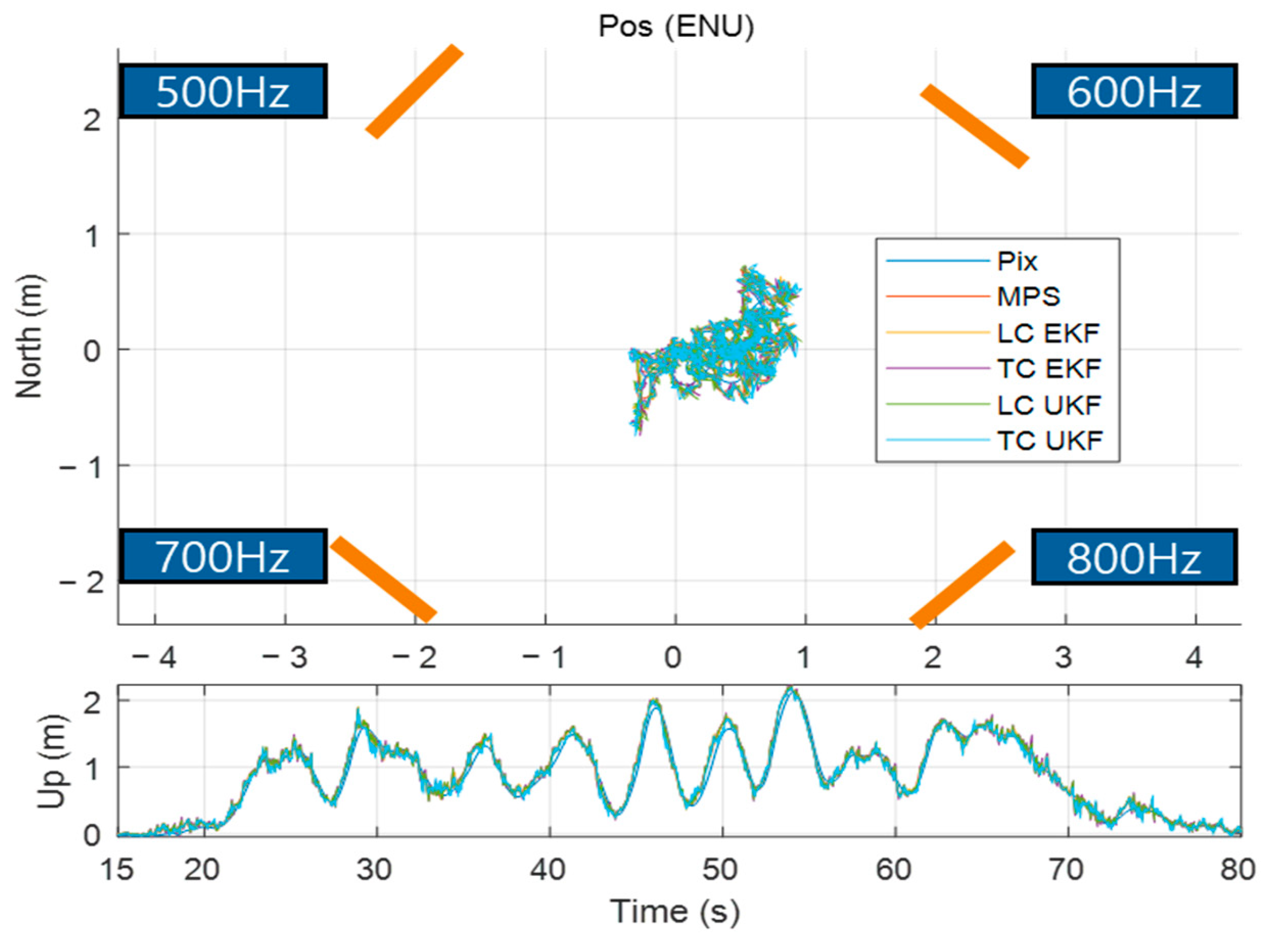
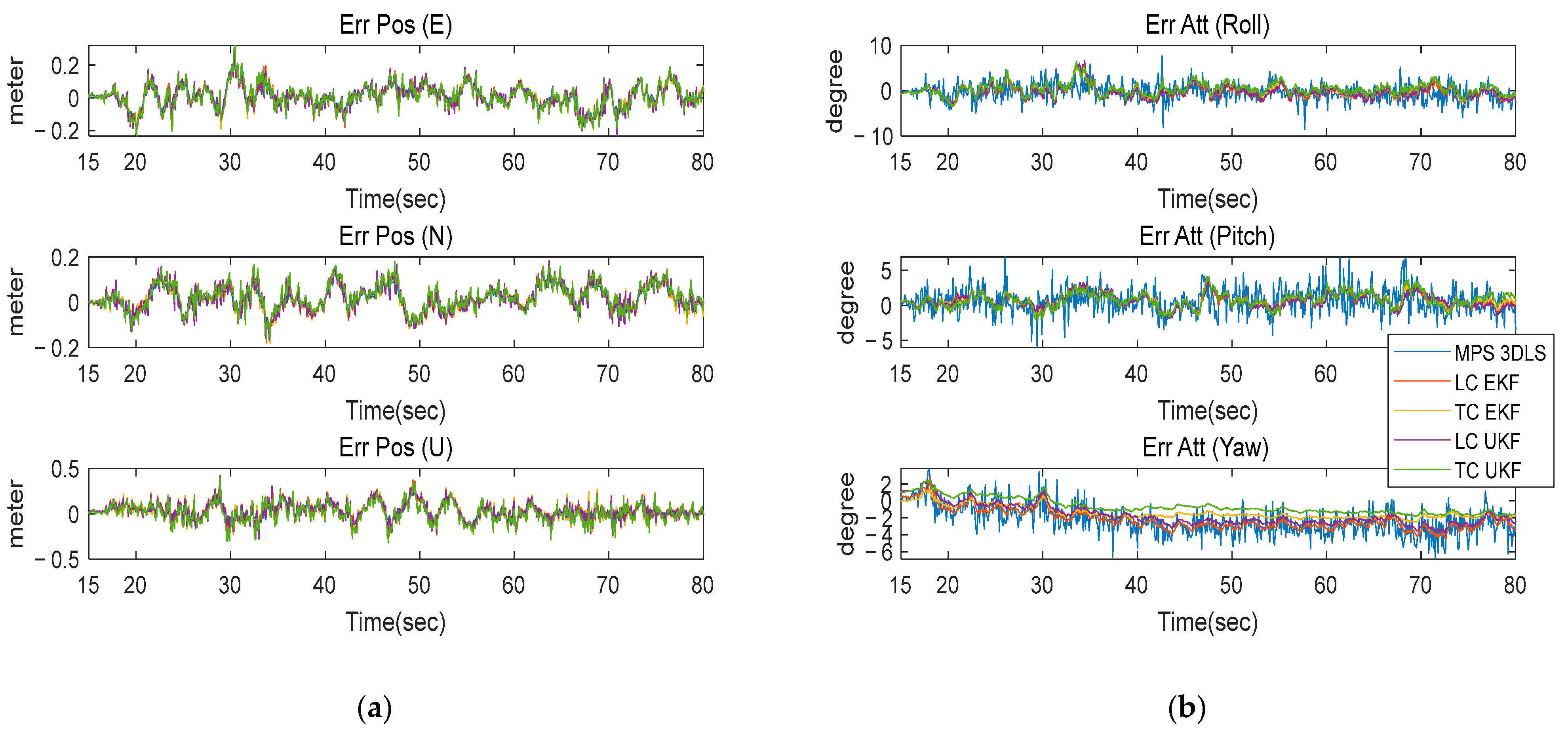
4.1.2. Results for Data with Repeated Model Uncertainty (Set 2)
4.2. Comparison of Navigation Solutions Between Conventional UKF and SUKF
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Blankenbach, J.; Norrdine, A. Position estimation using artificial generated magnetic fields. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010; pp. 1–5. [Google Scholar] [CrossRef]
- Blankenbach, J.; Norrdine, A.; Hellmers, H. A robust and precise 3D indoor positioning system for harsh environments. In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, NSW, Australia, 13–15 November 2012; pp. 1–8. [Google Scholar] [CrossRef]
- Lee, B.; Cho, S.Y.; Lee, J.; Sung, S. Magneto-Inertial Integrated Navigation System Design Incorporating Mapping and Localization Using Concurrent AC Magnetic Measurements. IEEE Access 2019, 7, 131221–131233. [Google Scholar] [CrossRef]
- Pasku, V.; De Angelis, A.; De Angelis, G.; Arumugam, D.D.; Dionigi, M.; Carbone, P.; Moschitta, A.; Ricketts, D.S. Magnetic Field-Based Positioning Systems. IEEE Commun. Surv. Tutor. 2017, 19, 2003–2017. [Google Scholar] [CrossRef]
- Lee, B.; Bae, J.Y.; Lee, J.; Sung, S. Tightly Coupled Integration Design for a Magneto-Inertial Navigation System Using Concurrent AC Magnetic Measurements. IEEE Access 2020, 8, 76253–76266. [Google Scholar] [CrossRef]
- Lee, B.; Sung, S. Planar Pose Estimation System Design via Explicit Spatial Representation Model of Concurrent AC Magnetic Fields. IEEE Trans. Instrum. Meas. 2022, 71, 18505914. [Google Scholar] [CrossRef]
- Lee, B.; Lee, J.; Sung, S. Comparative Performance Analysis of AC Magnetic Positioning Algorithms With Realtime Implementation Environment. Int. J. Control Autom. Syst. 2024, 22, 265–275. [Google Scholar] [CrossRef]
- Yun, J.H.; Sung, S. Design of Range/IMU-Aided Integrated Magnetic Positioning System for Improving Vertical Pose Estimation Performance. Int. J. Aeronaut. Space Sci. 2023, 24, 1430–1442. [Google Scholar] [CrossRef]
- Kwon, D.; Lee, B.; Sung, S. Design and Performance Validation of Tightly Coupled Magneto-Inertial Navigation System for Robust Outdoor Application. IEEE Access 2024, 12, 142215–142226. [Google Scholar] [CrossRef]
- Kwon, D.; Seo, J.; Lee, B.; Sung, S. Magnetic-Inertial Odometry Design Using Artificial AC Magnetic Fields in Outdoor Environment. In Proceedings of the 2024 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), Pilsen, Czech Republic, 4–6 September 2024; pp. 1–6. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K.; Durrant-Whyte, H.F. A new approach for filtering nonlinear systems. In Proceedings of the 1995 American Control Conference—ACC’95, Seattle, WA, USA, 21–23 June 1995; Volume 3, pp. 1628–1632. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Wan, E.A.; Van Der Merwe, R. The unscented Kalman filter for nonlinear estimation. In Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium (Cat. No.00EX373), Lake Louise, AB, Canada, 4 October 2000; pp. 153–158. [Google Scholar] [CrossRef]
- Julier, S.; Uhlmann, J.; Durrant-Whyte, H.F. A new method for the nonlinear transformation of means and covariances in filters and estimators. IEEE Trans. Autom. Control. 2000, 45, 477–482. [Google Scholar] [CrossRef]
- Julier, S.J. The scaled unscented transformation. In Proceedings of the 2002 American Control Conference (IEEE Cat. No.CH37301), Anchorage, AK, USA, 8–10 May 2002; Volume 6, pp. 4555–4559. [Google Scholar] [CrossRef]
- Straka, O.; Dunik, J.; Simandl, M. Scaling parameter in unscented transform: Analysis and specification. In Proceedings of the 2012 American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012; pp. 5550–5555. [Google Scholar] [CrossRef]
- Scardua, L.A.; da Cruz, J.J. Complete offline tuning of the unscented Kalman filter. Automatica 2017, 80, 54–61. [Google Scholar] [CrossRef]
- Nielsen, K.; Svahn, C.; Rodriguez-Deniz, H.; Hendeby, G. UKF Parameter Tuning for Local Variation Smoothing. In Proceedings of the 2021 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), Karlsruhe, Germany, 23–25 September 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Sakai, A.; Kuroda, Y. Discriminative Parameter Training of Unscented Kalman Filter. IFAC Proc. Vol. 2010, 43, 677–682. [Google Scholar] [CrossRef]
- Xia, G.; Wang, G. INS/GNSS Tightly-Coupled Integration Using Quaternion-Based AUPF for USV. Sensors 2016, 16, 1215. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Zhou, J.; Loffeld, O. Quaternion-based Kalman filtering on INS/GPS. In Proceedings of the 2012 15th International Conference on Information Fusion, Singapore, 9–12 July 2012; pp. 511–518. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Set 1 | Navigation Method | Position RMSE [Centimeter] | Attitude RMSE [Deg] | ||||||
| East | North | Up | 3D | Roll | Pitch | Yaw | 3D | ||
| Sec 1 | MPS 3D LS | 5.43 | 4.63 | 6.55 | 9.69 | 2.00 | 2.17 | 1.49 | 3.30 |
| LC EKF | 5.69 | 4.95 | 7.92 | 10.93 | 1.04 | 1.07 | 0.93 | 1.76 | |
| LC UKF | 5.92 | 5.10 | 8.06 | 11.22 | 1.12 | 1.00 | 0.84 | 1.72 | |
| TC EKF | 6.44 | 5.23 | 8.93 | 12.19 | 1.03 | 1.09 | 1.05 | 1.83 | |
| TC UKF | 4.99 | 7.27 | 7.51 | 11.58 | 1.21 | 1.04 | 0.85 | 1.81 | |
| Sec 2 | MPS 3D LS | 5.84 | 6.14 | 8.15 | 11.75 | 4.16 | 2.44 | 5.62 | 7.41 |
| LC EKF | 6.25 | 6.35 | 9.65 | 13.14 | 1.86 | 1.16 | 5.37 | 5.80 | |
| LC UKF | 6.43 | 6.58 | 9.81 | 13.45 | 1.73 | 1.11 | 4.85 | 5.27 | |
| TC EKF | 4.83 | 6.15 | 12.19 | 14.48 | 1.88 | 1.28 | 2.50 | 3.38 | |
| TC UKF | 5.46 | 5.95 | 10.05 | 12.90 | 2.15 | 1.76 | 1.29 | 3.07 | |
| Sec 3 | MPS 3D LS | 5.28 | 7.89 | 6.42 | 11.46 | 2.11 | 2.25 | 2.12 | 3.74 |
| LC EKF | 6.17 | 8.42 | 8.24 | 13.29 | 1.16 | 1.15 | 1.72 | 2.37 | |
| LC UKF | 6.41 | 8.58 | 8.12 | 13.44 | 1.25 | 1.04 | 1.26 | 2.06 | |
| TC EKF | 6.75 | 8.97 | 8.56 | 14.11 | 1.22 | 1.16 | 1.64 | 2.35 | |
| TC UKF | 6.16 | 9.95 | 8.10 | 14.23 | 1.34 | 1.28 | 0.83 | 2.03 | |
| Total | MPS 3D LS | 5.39 | 6.42 | 6.78 | 10.78 | 2.59 | 2.24 | 2.97 | 4.53 |
| LC EKF | 5.95 | 6.81 | 8.33 | 12.30 | 1.31 | 1.11 | 2.68 | 3.78 | |
| LC UKF | 6.17 | 6.97 | 8.38 | 12.53 | 1.35 | 1.03 | 2.34 | 2.90 | |
| TC EKF | 6.23 | 7.13 | 9.43 | 13.36 | 1.32 | 1.15 | 1.65 | 2.41 | |
| TC UKF | 5.55 | 8.21 | 8.21 | 12.87 | 1.51 | 1.31 | 0.93 | 2.20 | |
| Set 2 | Navigation Method | Position RMSE [Centimeter] | Attitude RMSE [Deg] | ||||||
|---|---|---|---|---|---|---|---|---|---|
| East | North | Up | 3D | Roll | Pitch | Yaw | 3D | ||
| Sec 1 | MPS 3D LS | 4.68 | 6.59 | 7.81 | 11.24 | 1.96 | 1.88 | 1.92 | 3.33 |
| LC EKF | 5.50 | 7.46 | 9.53 | 13.29 | 1.57 | 1.18 | 1.41 | 2.41 | |
| LC UKF | 5.65 | 7.50 | 9.53 | 13.38 | 1.75 | 1.22 | 1.12 | 2.41 | |
| TC EKF | 5.26 | 7.44 | 9.74 | 13.33 | 1.65 | 1.17 | 0.98 | 2.25 | |
| TC UKF | 5.81 | 7.91 | 9.74 | 13.83 | 1.70 | 1.14 | 0.95 | 2.25 | |
| Sec 2 | MPS 3D LS | 5.01 | 5.24 | 10.30 | 12.60 | 1.98 | 1.96 | 3.22 | 4.25 |
| LC EKF | 5.47 | 6.08 | 11.66 | 14.25 | 1.15 | 1.16 | 2.95 | 3.37 | |
| LC UKF | 5.63 | 6.04 | 11.62 | 14.25 | 1.16 | 1.05 | 2.43 | 2.89 | |
| TC EKF | 5.60 | 5.82 | 11.76 | 14.27 | 1.14 | 1.16 | 1.76 | 2.40 | |
| TC UKF | 5.78 | 5.68 | 11.30 | 13.90 | 1.20 | 1.25 | 0.97 | 1.99 | |
| Sec 3 | MPS 3D LS | 5.83 | 6.83 | 5.66 | 10.62 | 2.09 | 2.20 | 3.35 | 4.52 |
| LC EKF | 6.56 | 7.27 | 6.96 | 12.02 | 1.12 | 1.30 | 3.02 | 3.48 | |
| LC UKF | 6.78 | 7.61 | 7.38 | 12.58 | 1.14 | 1.27 | 2.59 | 3.10 | |
| TC EKF | 6.43 | 7.22 | 7.90 | 12.49 | 1.16 | 1.39 | 1.91 | 2.63 | |
| TC UKF | 6.77 | 7.68 | 7.86 | 12.91 | 1.04 | 1.51 | 1.44 | 2.34 | |
| Total | MPS 3D LS | 5.08 | 6.16 | 8.22 | 11.46 | 2.01 | 1.99 | 2.87 | 4.03 |
| LC EKF | 5.73 | 6.87 | 9.68 | 13.18 | 1.34 | 1.19 | 2.52 | 3.10 | |
| LC UKF | 5.91 | 6.98 | 9.73 | 13.35 | 1.42 | 1.17 | 2.10 | 2.79 | |
| TC EKF | 5.67 | 6.77 | 9.97 | 13.32 | 1.37 | 1.22 | 1.58 | 2.42 | |
| TC UKF | 6.02 | 7.05 | 9.79 | 13.48 | 1.37 | 1.29 | 1.13 | 2.19 | |
| Set1 | Navigation Method | Position RMSE [Centimeter] | Attitude RMSE [Deg] | ||||||
| East | North | Up | 3D | Roll | Pitch | Yaw | 3D | ||
| Sec 1 | TC UKF | 4.99 | 7.27 | 7.51 | 11.58 | 1.21 | 1.04 | 0.85 | 1.81 |
| TC SUKF | 6.06 | 5.56 | 7.62 | 11.21 | 1.05 | 1.06 | 0.89 | 1.74 | |
| Sec 2 | TC UKF | 5.46 | 5.95 | 10.05 | 12.90 | 2.15 | 1.76 | 1.29 | 3.07 |
| TC SUKF | 4.38 | 6.03 | 10.62 | 12.97 | 1.86 | 1.53 | 1.46 | 2.81 | |
| Sec 3 | TC UKF | 6.16 | 9.95 | 8.10 | 14.23 | 1.34 | 1.28 | 0.83 | 2.03 |
| TC SUKF | 6.33 | 9.40 | 7.79 | 13.75 | 1.24 | 1.20 | 0.96 | 1.98 | |
| Total | TC UKF | 5.55 | 8.21 | 8.21 | 12.87 | 1.51 | 1.31 | 0.93 | 2.20 |
| TC SUKF | 5.82 | 7.42 | 8.27 | 12.54 | 1.34 | 1.22 | 1.04 | 2.09 | |
| Set 2 | Navigation Method | Position RMSE [Centimeter] | Attitude RMSE [Deg] | ||||||
|---|---|---|---|---|---|---|---|---|---|
| East | North | Up | 3D | Roll | Pitch | Yaw | 3D | ||
| Sec 1 | TC UKF | 5.81 | 7.91 | 9.74 | 13.83 | 1.70 | 1.14 | 0.95 | 2.25 |
| TC SUKF | 5.32 | 7.39 | 9.43 | 13.10 | 1.62 | 1.10 | 0.99 | 2.19 | |
| Sec 2 | TC UKF | 5.78 | 5.68 | 11.30 | 13.90 | 1.20 | 1.25 | 0.97 | 1.99 |
| TC SUKF | 5.62 | 5.64 | 11.17 | 13.72 | 1.20 | 1.22 | 1.01 | 1.98 | |
| Sec 3 | TC UKF | 6.77 | 7.68 | 7.86 | 12.91 | 1.04 | 1.51 | 1.44 | 2.34 |
| TC SUKF | 6.51 | 7.41 | 7.60 | 12.45 | 1.07 | 1.44 | 1.50 | 2.33 | |
| Total | TC UKF | 6.02 | 7.05 | 9.79 | 13.48 | 1.37 | 1.29 | 1.13 | 2.19 |
| TC SUKF | 5.72 | 6.75 | 9.57 | 13.03 | 1.33 | 1.24 | 1.17 | 2.16 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seo, J.; Kwon, D.; Lee, B.; Sung, S. Robust MPS-INS UKF Integration and SIR-Based Hyperparameter Estimation in a 3D Flight Environment. Aerospace 2025, 12, 228. https://doi.org/10.3390/aerospace12030228
Seo J, Kwon D, Lee B, Sung S. Robust MPS-INS UKF Integration and SIR-Based Hyperparameter Estimation in a 3D Flight Environment. Aerospace. 2025; 12(3):228. https://doi.org/10.3390/aerospace12030228
Chicago/Turabian StyleSeo, Juyoung, Dongha Kwon, Byungjin Lee, and Sangkyung Sung. 2025. "Robust MPS-INS UKF Integration and SIR-Based Hyperparameter Estimation in a 3D Flight Environment" Aerospace 12, no. 3: 228. https://doi.org/10.3390/aerospace12030228
APA StyleSeo, J., Kwon, D., Lee, B., & Sung, S. (2025). Robust MPS-INS UKF Integration and SIR-Based Hyperparameter Estimation in a 3D Flight Environment. Aerospace, 12(3), 228. https://doi.org/10.3390/aerospace12030228