
An Initial Trajectory Design for the Multi-Target Exploration of the Electric Sail


Abstract
1. Introduction
2. Problem Description
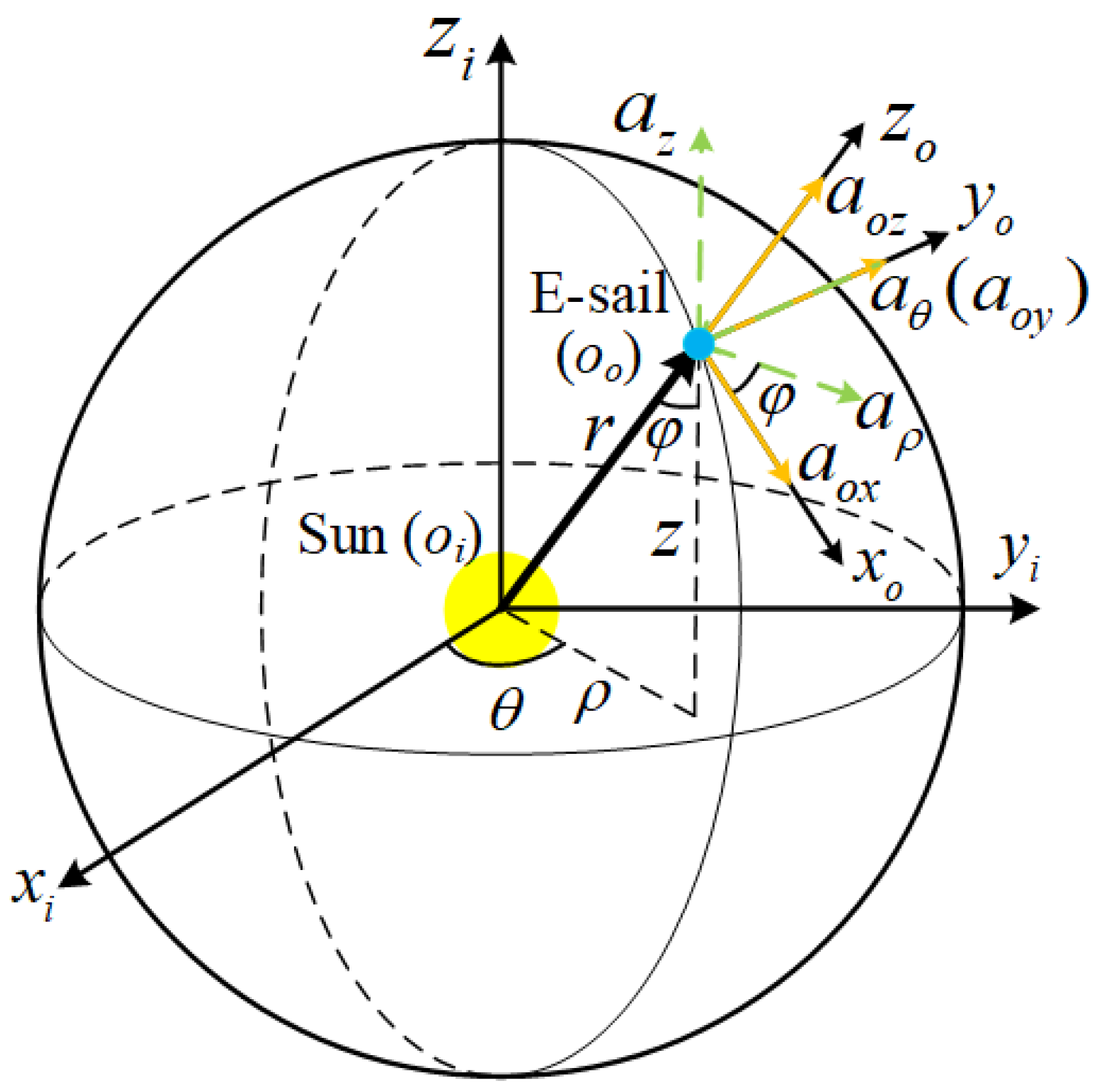
2.1. Coordinate Systems
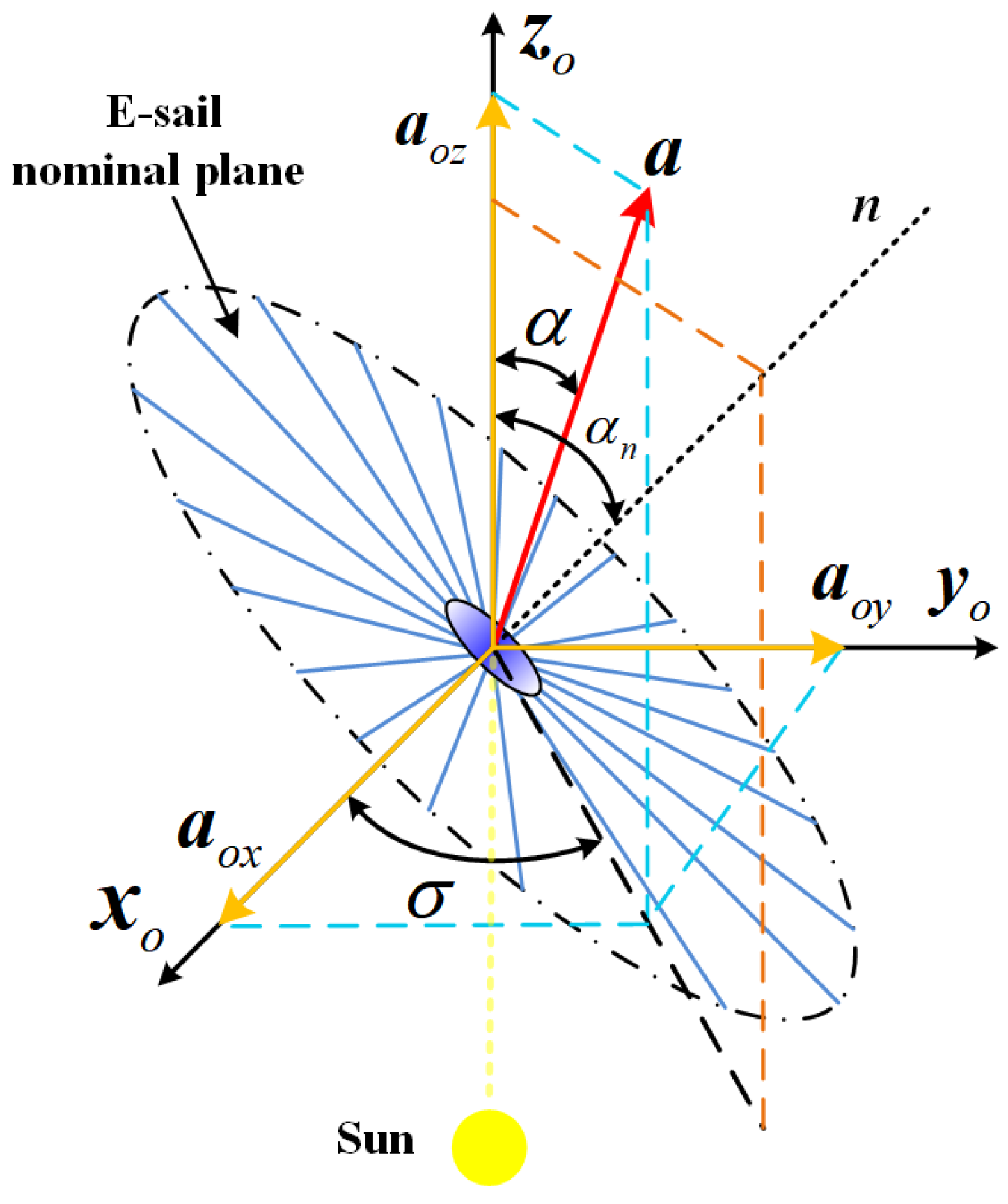
2.2. Thrust Model
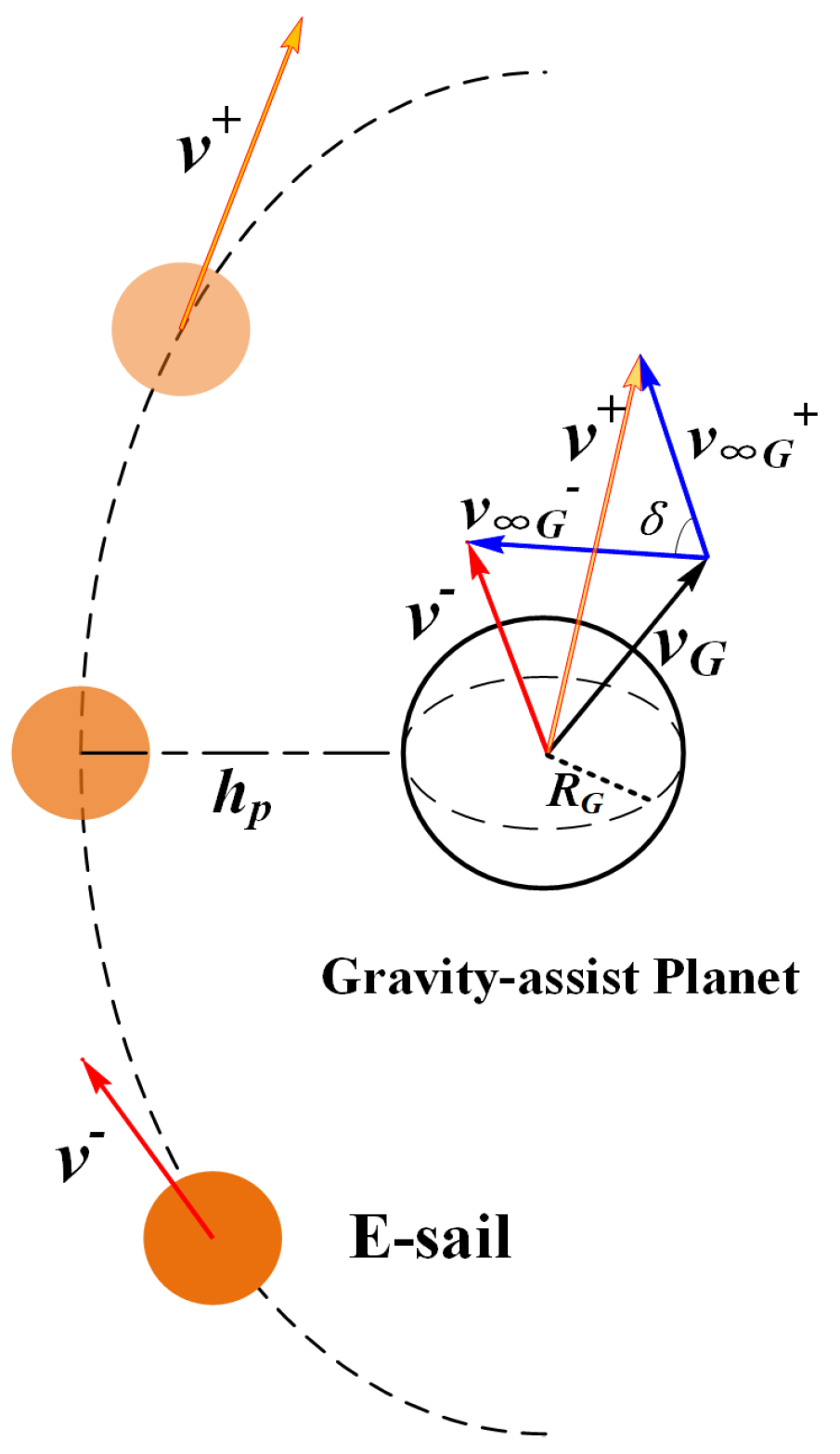
2.3. Gravity-Assist Models
2.4. Constraint Conditions
3. The Bezier Shape-Based Method
4. Simulation Analysis
4.1. Mars Gravity Assistance—Solar-System Boundary Exploration
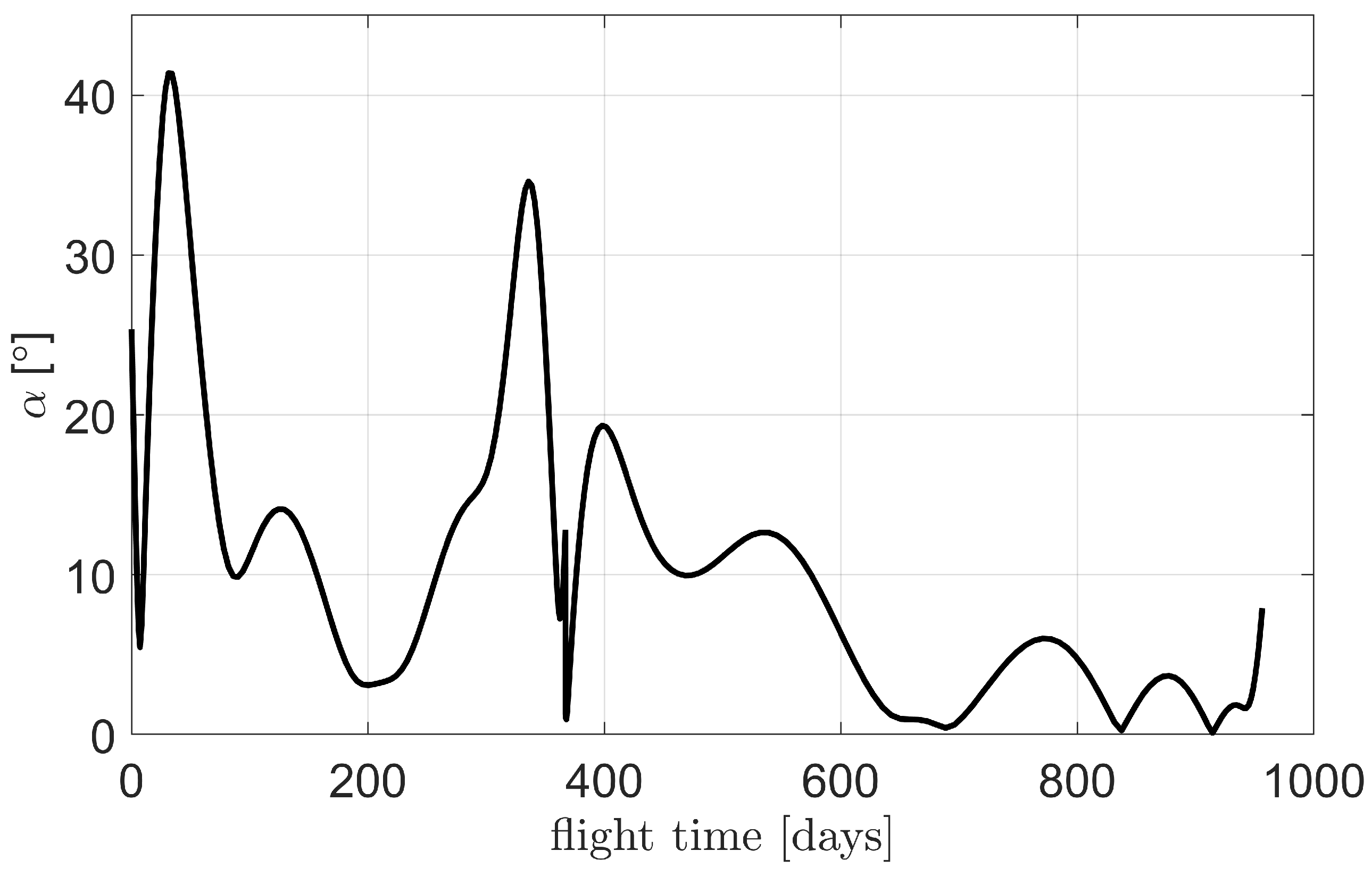
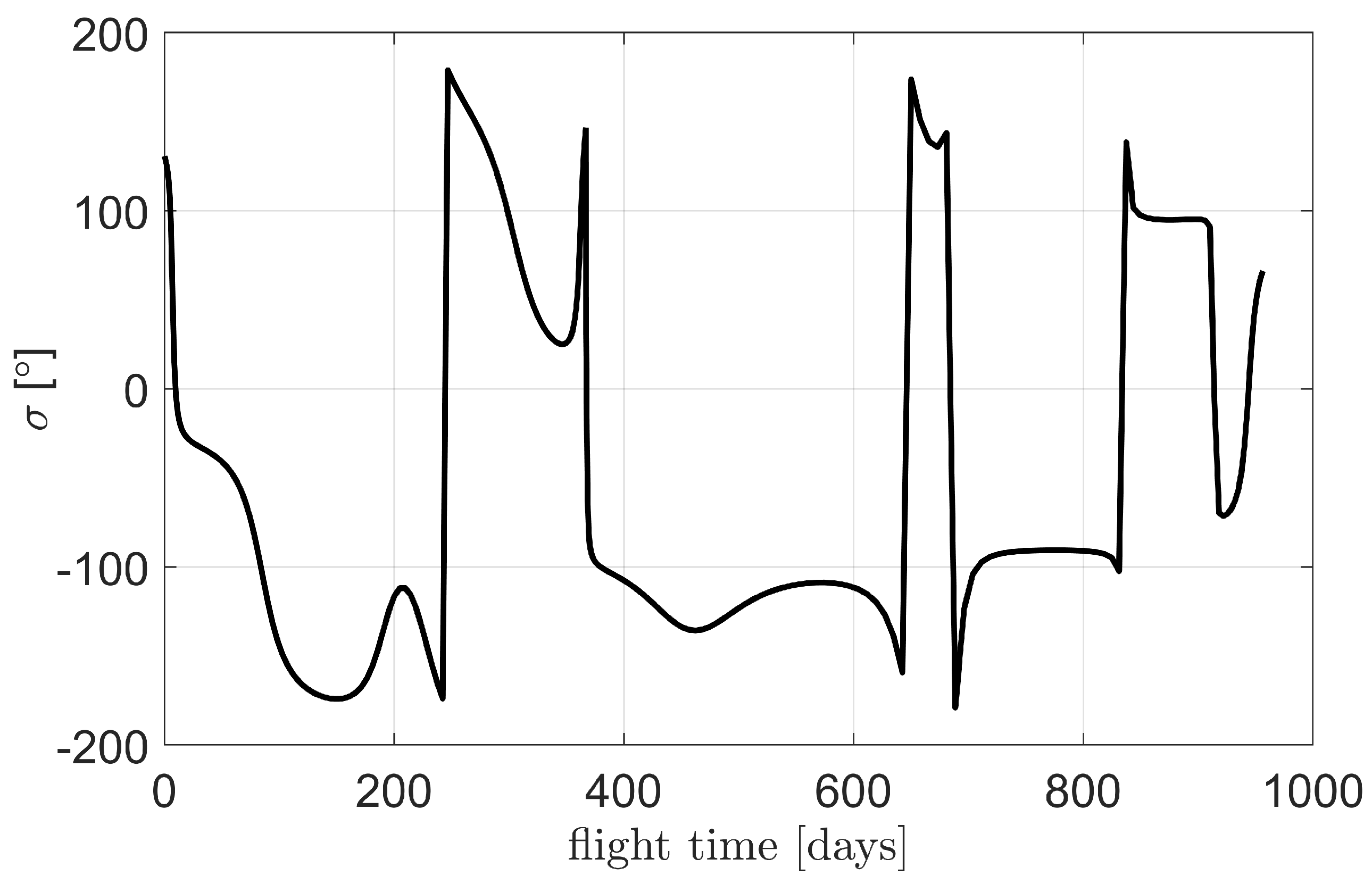
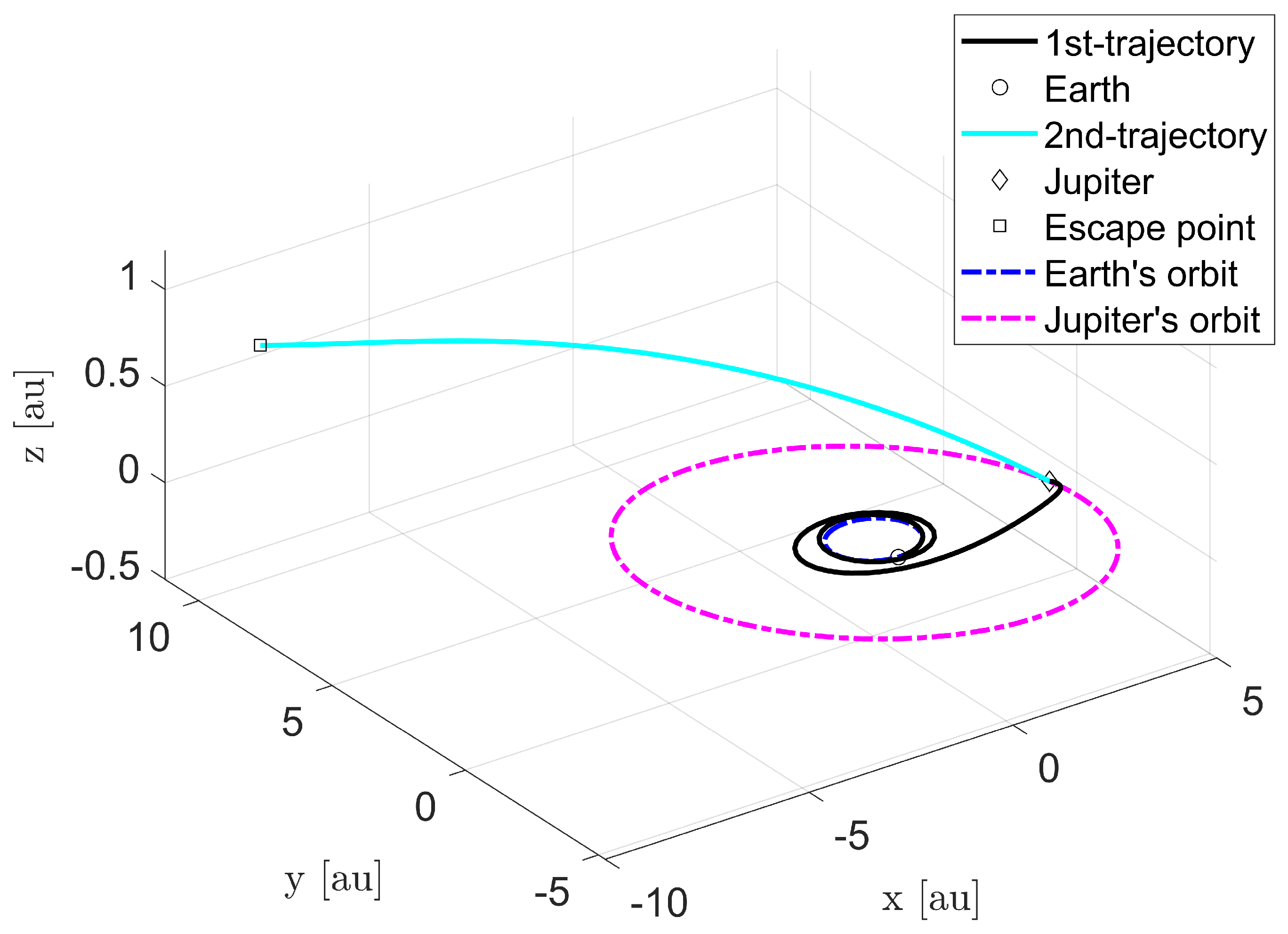
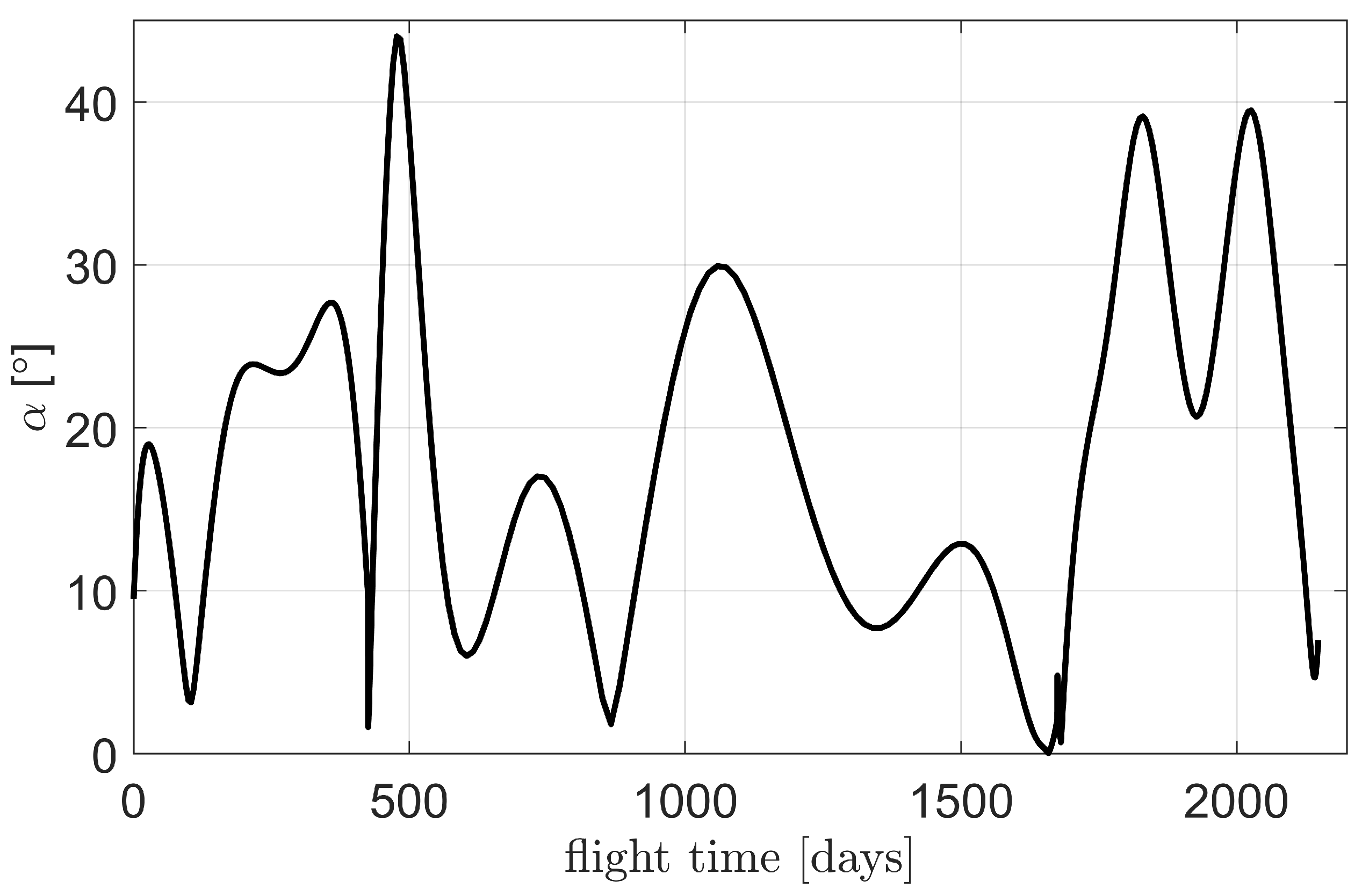
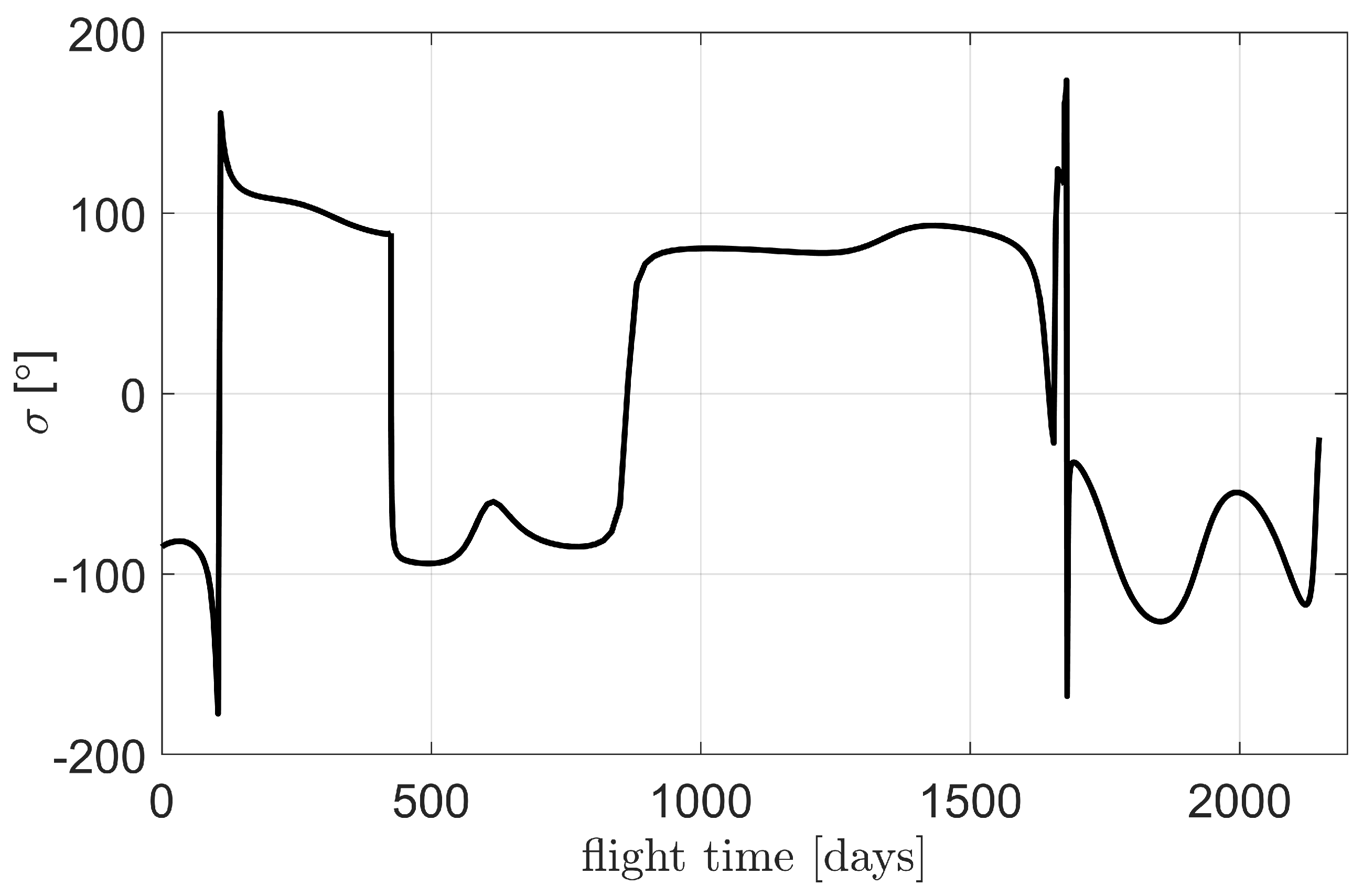
4.2. Jupiter Gravity Assistance—Solar-System Boundary Exploration
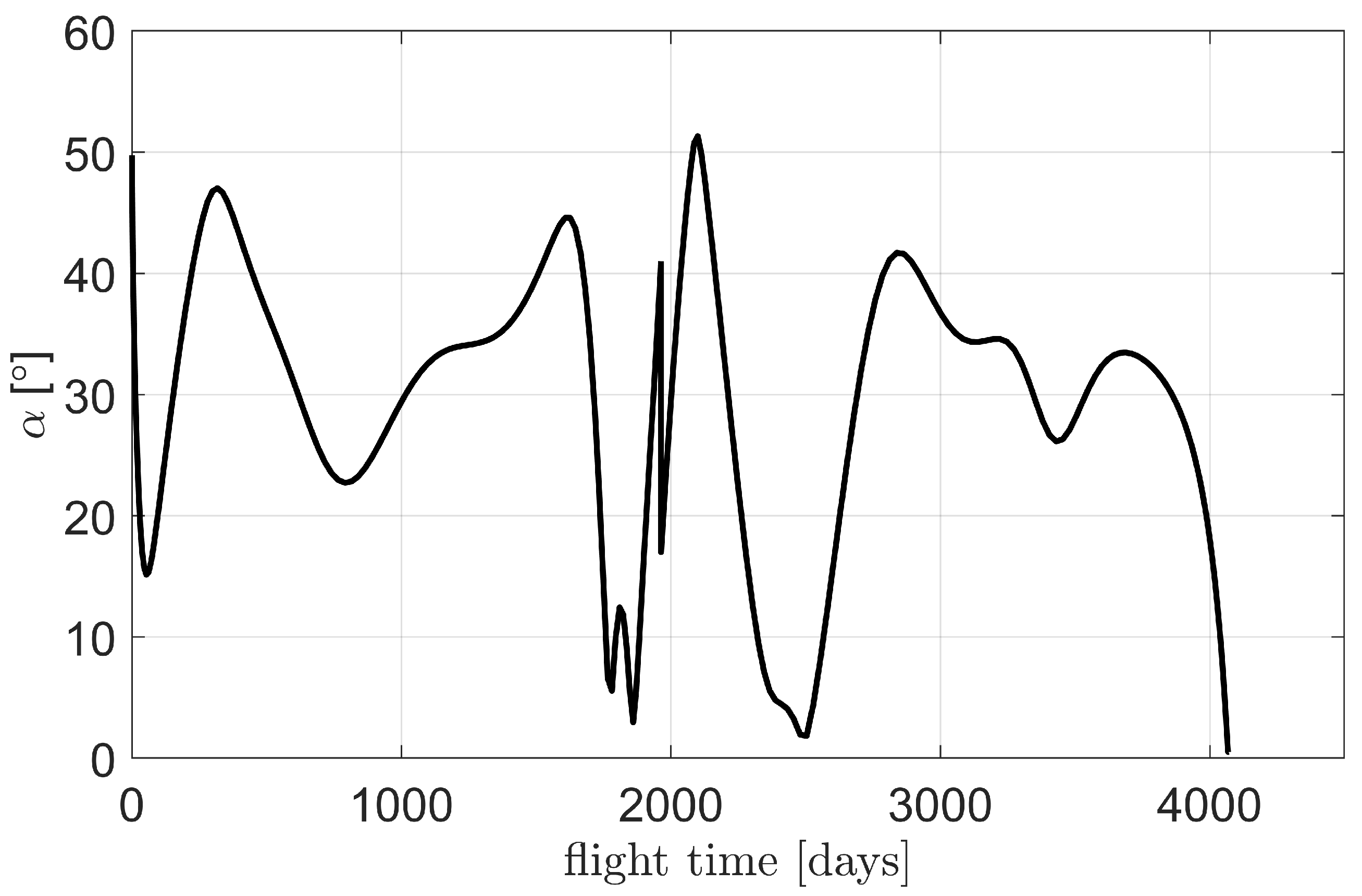
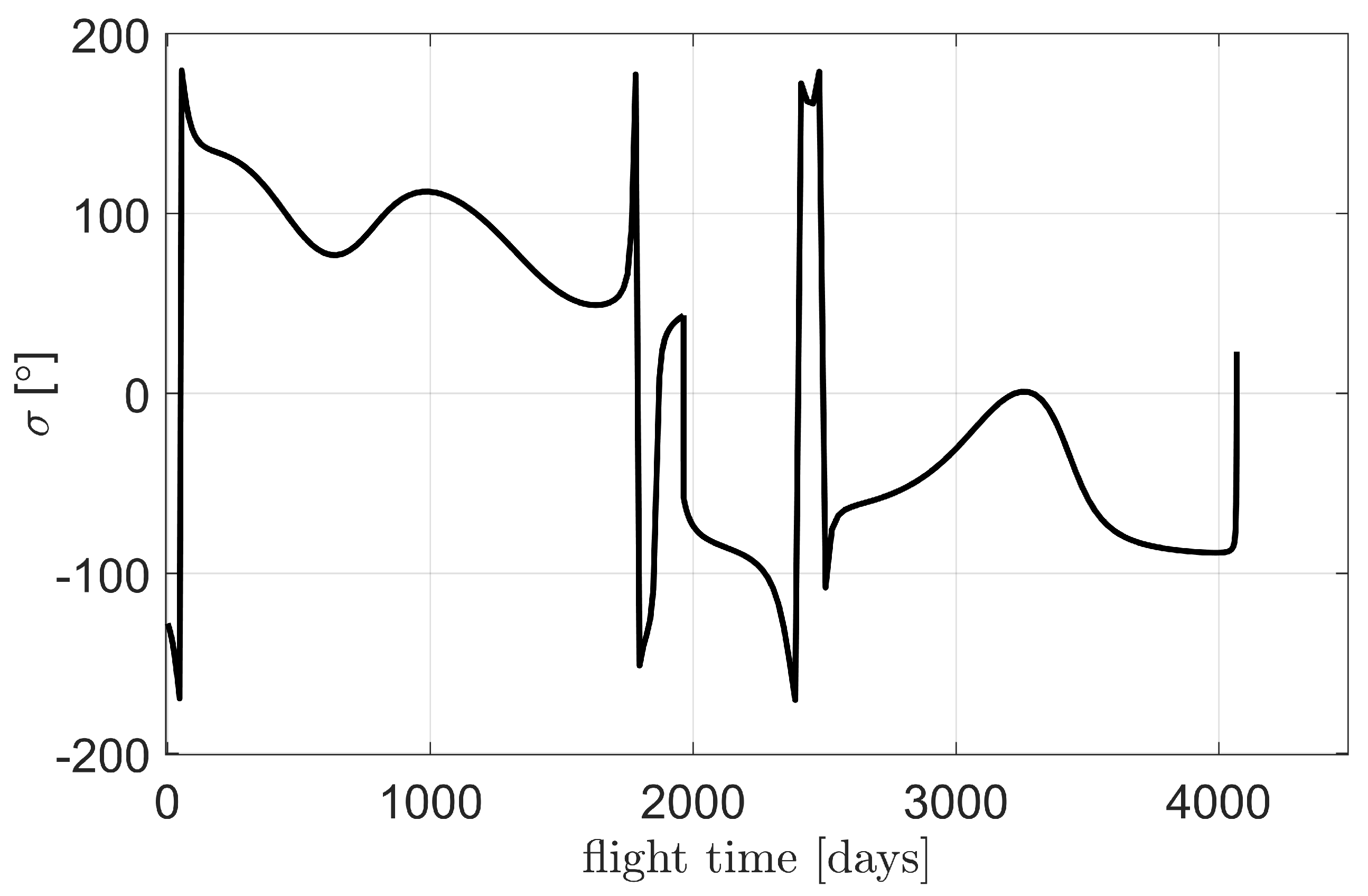
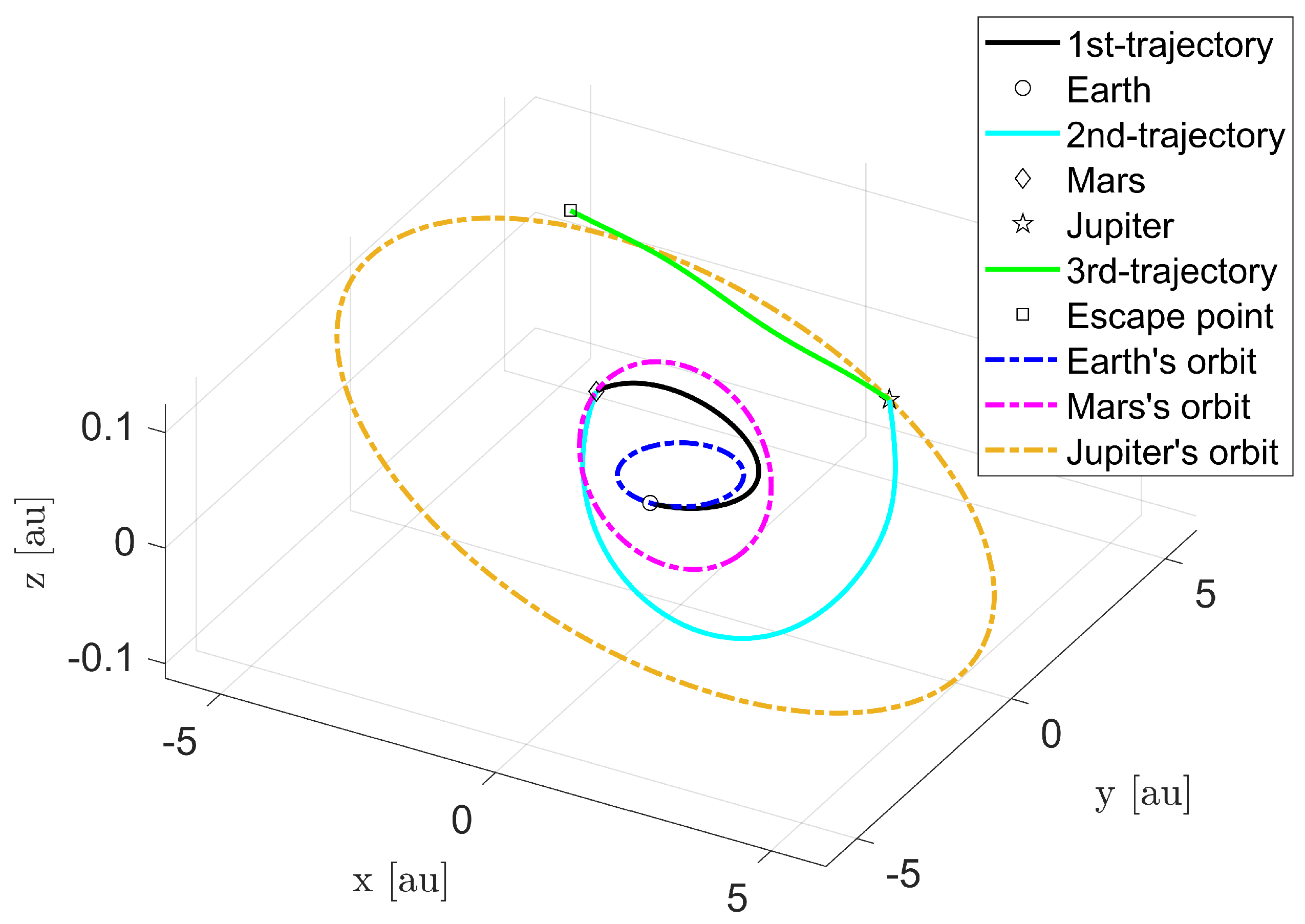
4.3. Mars–Jupiter Gravity Assistance—Solar-System Boundary Exploration
4.4. Simulation Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Qi, N.; Fan, Z.; Huo, M.; Du, D.; Zhao, C. Fast trajectory generation and asteroid sequence selection in multispacecraft for multiasteroid exploration. IEEE Trans. Cybern. 2022, 52, 6071–6082. [Google Scholar] [CrossRef] [PubMed]
- Simone, C.; Matteo, C.; Paolo, G.; Stefano, S. Proprioceptive swarms for celestial body exploration. Acta Astronaut. 2024, 223, 159–174. [Google Scholar]
- Bassetto, M.; Niccolai, L.; Quarta, A.; Mengali, G. A comprehensive review of Electric Solar Wind Sail concept and its applications. Prog. Aerosp. Sci. 2022, 128, 100768. [Google Scholar] [CrossRef]
- Palos, M.F.; Janhunen, P.; Toivanen, P.; Tajmar, M.; Iakubivskyi, I.; Micciani, A.; Orsini, N.; Kütt, J.; Rohtsalu, A.; Dalbins, J.; et al. Electric Sail Mission Expeditor, ESME: Software Architecture and Initial ESTCube Lunar Cubesat E-Sail Experiment Design. Aerospace 2023, 10, 694. [Google Scholar] [CrossRef]
- Slavinskis, A.; Palos, M.F.; Dalbins, J.; Janhunen, P.; Tajmar, M.; Ivchenko, N.; Rohtsalu, A.; Micciani, A.; Orsini, N.; Moor, K.M.; et al. Electric Sail Test Cube–Lunar Nanospacecraft, ESTCube-LuNa: Solar Wind Propulsion Demonstration Mission Concept. Aerospace 2024, 11, 230. [Google Scholar] [CrossRef]
- Niccolai, L. Optimal deep-space heliocentric transfers with an electric sail and an electric thruster. Adv. Space Res. 2024, 73, 85–94. [Google Scholar] [CrossRef]
- Niccolai, L.; Anderlini, A.; Mengali, G.; Quarta, A. Impact of solar wind fluctuations on Electric Sail mission design. Aerosp. Sci. Technol. 2018, 82–83, 38–45. [Google Scholar] [CrossRef]
- Caruso, A.; Niccolai, L.; Mengali, G.; Quarta, A. Electric sail trajectory correction in presence of environmental uncertainties. Aerosp. Sci. Technol. 2019, 94, 105395. [Google Scholar] [CrossRef]
- Quarta, A.A. Impact of Pitch Angle Limitation on E-Sail Interplanetary Transfers. Aerospace 2024, 11, 729. [Google Scholar] [CrossRef]
- Quarta, A.A.; Mengali, G. Electric Sail Mission Analysis for Outer Solar System Exploration. J. Guid. Control Dyn. 2010, 33, 740–755. [Google Scholar] [CrossRef]
- Niccolai, L.; Quarta, A.; Mengali, G. Exploration of Asteroids and Comets with Innovative Propulsion Systems. In Handbook of Space Resources; Badescu, V., Zacny, K., Bar-Cohen, Y., Eds.; Springer: Cham, Switzerland, 2003; pp. 841–869. [Google Scholar]
- Niccolai, L.; Bassetto, M.; Quarta, A.A.; Mengali, G. Optimal Earth Gravity-Assist Maneuvers with an Electric Solar Wind Sail. Aerospace 2022, 9, 717. [Google Scholar] [CrossRef]
- Rao, A.V.; Benson, D.A.; Darby, C.; Patterson, M.A.; Francolin, C.; Sanders, I.; Huntington, G.T. Algorithm 902: GPOPS, a matlab software for solving multiple-phase optimal control problems using the Gauss pseudospectral method. ACM Trans. Math. Softw. 2010, 37, 22. [Google Scholar] [CrossRef]
- Tang, G.; Jiang, F.; Li, J. Fuel-optimal low-thrust trajectory optimization using indirect method and successive convex programming. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 2053–2066. [Google Scholar] [CrossRef]
- Oshima, K. Regularized direct method for low-thrust trajectory optimization: Minimum-fuel transfer between cislunar periodic orbits. Adv. Space Res. 2023, 72, 2051–2063. [Google Scholar] [CrossRef]
- Sidhoum, Y.; Oguri, K. On the Performance of different smoothing methods for indirect low-thrust trajectory optimization. J. Astronaut. Sci. 2023, 70, 51. [Google Scholar] [CrossRef]
- Quarta, A.; Mengali, G.; Bassetto, M.; Niccolai, L. Optimal Circle-to-Ellipse Orbit Transfer for Sun-Facing E-Sail. Aerospace 2022, 9, 671. [Google Scholar] [CrossRef]
- Xie, C.; Zhang, G.; Zhang, Y. Shaping approximation for low-thrust trajectories with large out-of-plane motion. J. Guid. Control. Dyn. 2016, 39, 2776–2785. [Google Scholar] [CrossRef]
- Zeng, K.; Geng, Y.; Wu, B. Shape-based analytic safe trajectory design for spacecraft equipped with low-thrust engines. Aerosp. Sci. Technol. 2017, 62, 87–97. [Google Scholar] [CrossRef]
- Fan, Z.; Huo, M.; Qi, N.; Zhao, C.; Yu, Z.; Lin, T. Initial Design of Low-Thrust Trajectories Based on the Bezier Curve-based Shaping Approach. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2020, 234, 1825–1835. [Google Scholar] [CrossRef]
- Gondelach, D.J.; Noomen, R. Hodographic-shaping method for low-thrust interplanetary trajectory design. J. Apacecraft Rocket. 2015, 52, 728–738. [Google Scholar] [CrossRef]
- Fan, Z.; Huo, M.; Quarta, A.A.; Mengali, G.; Qi, N. Improved Monte Carlo Tree Search-based approach to low-thrust multiple gravity-assist trajectory design. Aerosp. Sci. Technol. 2022, 130, 107946. [Google Scholar] [CrossRef]
- Huo, M.; Fan, Z.; Qi, J.; Qi, N.; Zhu, D. Fast analysis of multi-asteroid exploration mission using multiple electric sails. J. Guid. Control. Dyn. 2023, 46, 1015–1022. [Google Scholar] [CrossRef]
- Wall, B.J.; Conway, B.A. Shape-Based approach to low-thrust rendezvous trajectory design. J. Guid. Control Dyn. 2009, 32, 95–101. [Google Scholar] [CrossRef]
- Shang, H.; Cui, P.; Qiao, D. A shape-based design approach to interplanetary low-thrust transfer trajectory. J. Astronaut. 2010, 31, 1569–1574. [Google Scholar]
- Novak, D.M.; Vasile, M. Improved shaping approach to the preliminary design of low-thrust trajectories. J. Guid. Control Dyn. 2011, 34, 128–147. [Google Scholar] [CrossRef]
- Huo, M.; Zhang, G.; Qi, N.; Liu, Y.; Shi, X. Initial trajectory design of electric solar wind sail based on finite Fourier series shape-based method. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 3674–3683. [Google Scholar] [CrossRef]
- Huo, M.; Mengali, G.; Quarta, A.A.; Qi, N. Electric sail trajectory design with bezier curve-based shaping approach. Aerosp. Sci. Technol. 2019, 88, 126–135. [Google Scholar] [CrossRef]
- Petropoulos, A.E.; Longuski, J.M. Shape-based algorithm for automated design of low-thrust, gravity-assist trajectories. J. Spacecr. Rocket. 2004, 41, 787–796. [Google Scholar] [CrossRef]
- Abdelkhalik, O.; Taheri, E. Approximate on-off low-thrust space trajectories using Fourier series. J. Spacecr. Rocket. 2012, 49, 962–965. [Google Scholar] [CrossRef]
- Taheri, E.; Abdelkhalik, O. Fast initial trajectory design for low-thrust restricted-three-body problems. J. Guid. Control Dyn. 2015, 38, 2146–2160. [Google Scholar] [CrossRef]
- Taheri, E.; Abdelkhalik, O. Initial three-dimensional low-thrust trajectory design. Adv. Space Res. 2016, 57, 889–903. [Google Scholar] [CrossRef]
- Bassetto, M.; Quarta, A.; Mengali, G. Locally-optimal electric sail transfer. Proc. Inst. Mech. Eng. Part G-J. Aerosp. Eng. 2019, 233, 166–179. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Detection Modes | Detected Targets | Total Flight Time/Years | Computation Time/s |
|---|---|---|---|
| Mars–GA | Mars, SSB | 2.62 | 9.4 |
| Jupiter–GA | Jupiter, SSB | 11.15 | 9.8 |
| Mars–Jupiter–GA | Mars, Jupiter, SSB | 5.88 | 98.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, Z.; Cheng, F.; Li, W.; Pan, G.; Huo, M.; Qi, N. An Initial Trajectory Design for the Multi-Target Exploration of the Electric Sail. Aerospace 2025, 12, 196. https://doi.org/10.3390/aerospace12030196
Fan Z, Cheng F, Li W, Pan G, Huo M, Qi N. An Initial Trajectory Design for the Multi-Target Exploration of the Electric Sail. Aerospace. 2025; 12(3):196. https://doi.org/10.3390/aerospace12030196
Chicago/Turabian StyleFan, Zichen, Fei Cheng, Wenlong Li, Guiqi Pan, Mingying Huo, and Naiming Qi. 2025. "An Initial Trajectory Design for the Multi-Target Exploration of the Electric Sail" Aerospace 12, no. 3: 196. https://doi.org/10.3390/aerospace12030196
APA StyleFan, Z., Cheng, F., Li, W., Pan, G., Huo, M., & Qi, N. (2025). An Initial Trajectory Design for the Multi-Target Exploration of the Electric Sail. Aerospace, 12(3), 196. https://doi.org/10.3390/aerospace12030196