1. Introduction
X-ray pulsar navigation (XPNAV) is a novel method for spacecraft navigation. It can be used not only as an assistant to near-Earth space probes, such as satellite navigation systems, but can also supply the absolute time and spatial reference for deep space probes. It is an effective way to solve the problem of spacecraft autonomous navigation. The pulsar is far away from the solar system. The radiation direction of the pulsar observed at any point in the solar system is essentially the same, which can be approximated as a constant vector [
1]. At present, the XPNAV system has a positioning precision within a range of several kilometers, which is far from its theoretical value [
1]. There are several approaches to enhance the precision of XPNAV. Some authors have worked on improving the accuracy of the phase estimation of the cumulative pulse profile, including the time domain measurement method based on the bispectrum transform [
2] or the Bayesian [
3] or optimal frequency band algorithm [
4]. Another solution was to acquire supplementary observational data from existing navigation systems or various space sources, for example, XPNAV and doppler system fusion [
5,
6], using the observational information of stars, planets or natural satellites [
7,
8,
9,
10]. In XPNAV, the time of arrival (TOA) is the essential observation, and the incremental phase of two instants of the satellite [
11] or baseline vector angle between the two satellites [
12] can also be used to improve the navigation precision. A more advanced filter algorithm, such as the adaptive difference Kalman filter (ADDF), is employed for navigation filtering. The aforementioned integration approach has certain potential, but it is limited in accuracy and is susceptible to noise interference. Moreover, a subsystem is required to manage these extra inputs, which enhances the complexity of the navigation system.
This paper presents an augmentation method for XPNAV by using the position difference between the reference satellite and the target spacecraft. The reference satellite, whose position is accurately known, is equipped with three detectors, two for navigation and one for communication. The accurate phase evolution model at the solar system barycenter (SSB) is calculated by using the accurate position information. First, the reference satellite receives the X-ray pulsar signal and obtains its time measurement value. Then, the time difference between the measurement value and the real time value is obtained. Next, it takes the time difference as the measurement error correction, which is sent to the spacecraft through the X-ray communication link. Finally, the spacecraft uses the time difference to correct its position information, so as to improve the navigation accuracy.
Currently, radio frequency or optical links are used to send information between spacecraft and Earth. X-ray communication (XCOM) has even greater advantages, as X-rays possess wavelengths that are considerably shorter (
) than those of both radio and laser. Based on Planck’s radiation law, the number of photons is inversely related to the wavelength. This implies that, essentially, XCOM has the capability to transmit more data with the same level of transmission power. The X-rays can broadcast in narrower beams, reducing energy consumption during long-distance communication. On the other hand, the high-energy X-ray has a small loss of space transmission and diffraction [
13]. The more photons the X-ray source emits, the higher the sensitivity of the detector. Last but not least, with the integration of communication and ranging, the X-ray detector can be shared and its utilization improved. Thus, information transmission can be realized with small volume and low power consumption. Moreover, the signal transmission is colorless and scattered, so the ranging accuracy is higher. We can use the ranging observation to make further improvements to the accuracy of XPNAV.
The concept of X-ray communication was first proposed in 2012 [
14]. It is a new technology for space communication with X-rays, which have the characteristics of no attenuation, small spatial dispersion and interference and high ranging precision in deep space transmission [
15,
16]. The link power equation was established; also, the relationships between the transmitting speed, communication distance, bit error ratio and the transmission power were analyzed [
17]. In one study [
18], an idea for X-ray ranging based on XCOM was introduced and a detailed performance analysis was presented. Their experiments showed that X-ray ranging can provide accurate range measurement when the SNR of the ranging signal reaches a certain level, and it could serve as additional observations to augment XPNAV. A NASA experiment using a Modulated X-ray Source (MXS) and the X-ray telescope NICER demonstrated the possibility of the XCOM scheme with the transmission of GPS-like signals over a distance of 50 m [
19].
To transmit the time difference from the reference satellite to the spacecraft, the code and modulation of the signal must be analyzed first. In one study [
20], a space audio communication system based on X-rays with on–off keying (OOK) modulation was designed and tested. In another study [
21], the impact of the OOK, pulse position modulation (PPM) and Quadrature Amplitude Modulation on the X-ray communication system performance was compared and analyzed. The OOK modulation system is straightforward and easy to implement, yet it suffers from low transmission efficiency. Furthermore, as the modulation rate increases, the transmission power decreases, limiting its capability for long-distance or ultra-high-speed communication. PPM modulation uses the position of the pulse to transmit information. It has the advantages of low average power and high transmission efficiency. But unfortunately, the anti-jamming ability is not strong enough and strict frame synchronization is needed. In space communication, many complex factors, such as space background light, channel interference and photon fluctuation, will affect the bit error rate (BER) of the system. In Reference [
22], light polarization modulation with PPM is proposed, which can not only reduce the negative effects caused by atmospheric channels but also increase the communication code rate effectively in atmospheric laser communication. In Reference [
23], the range information is communicated through circular polarization states, and simulation results indicate that the X-ray circularly polarized ranging technique could provide high-accuracy range measurement results. Consequently, the paper uses 4PPM circular polarization modulation to load ranging codes on X-ray photons to achieve space ranging. It is expected that this method can obtain larger communication capacity and smaller ranging error. Compared with the X-ray pulsar signal, the form and power of the X-ray ranging signal are controllable, and the design and application are flexible. The ranging and communication signal can be integrated and transmitted simultaneously. In addition, X-ray navigation and communication share the same X-ray detector, which is conducive to the miniaturization and integration of the system.
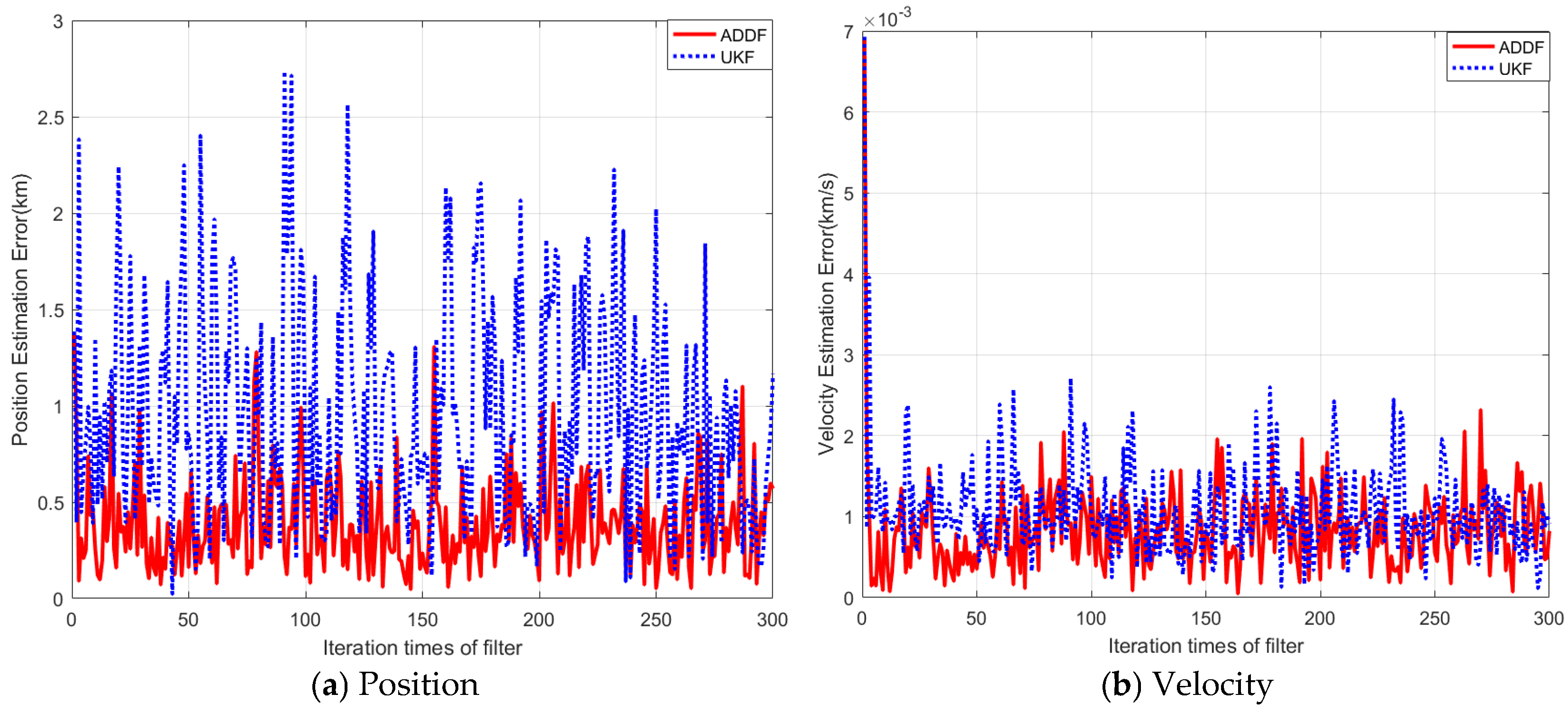
In XPNAV, the extended Kalman filter (EKF) and unscented Kalman filter (UKF) are frequently employed as filtering methods. The accuracy of the EKF is limited because it uses a first-order approximation of the system equations. The UKF eliminates the derivative calculation and offers greater precision compared to the EKF. However, the statistics of process noise are often unknown, and incorrect assumptions about it can result in the suboptimal performance of the filter. Thus, an adaptive divided difference filter (ADDF) is selected. The performance of the ADDF filter is demonstrated on a nonlinear system mentioned in the study by [
24]. By adjusting the covariance of process noise, it can estimate the states of a nonlinear system with unknown process noise statistics. The paper demonstrates a substantial enhancement in navigation precision for augmented XPNAV when employing the ADDF.
The structure of this paper is outlined below.
Section 2 will introduce the fundamental principles of augmented XPNAV. The pulsar timing and ranging observation equations are then established, and the ranging error is also analyzed theoretically. Then, the nonlinear ADDF algorithm, including the measurement model and orbital dynamic model, are described in
Section 3. In
Section 4, numerical simulations and their analyses are provided, followed by conclusions drawn in
Section 5.
2. Principle of Augmented XPNAV System
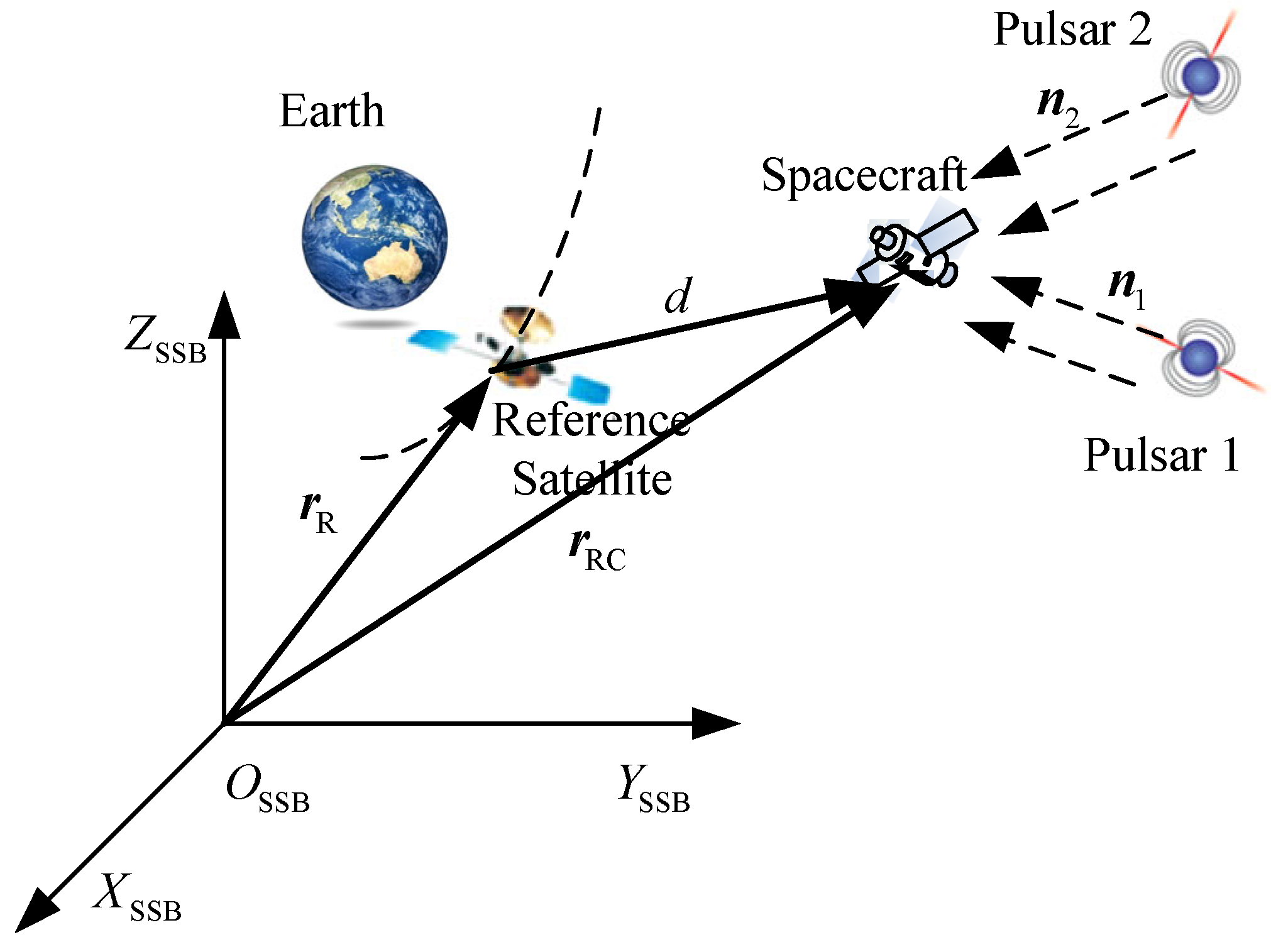
XPNAV determines the position and velocity of a spacecraft by utilizing the time difference of arrival (TDOA) of X-ray pulses between the spacecraft and the solar system barycenter (SSB). The traditional XPNAV method requires at least three different pulsars to confirm the three-dimensional position of the spacecraft. The differential augmented XPNAV method proposed in this paper needs to observe only two different pulsars, and the range between the Earth’s reference satellite and the target spacecraft is an additional observation. The celestial reference system is established in
Figure 1.
The barycenter of the solar system is the origin, is vertical with the celestial equator, is pointing to the vernal point defined by the standard epoch J2000.0 and is pointing to the X–Z plane with regard to the right-hand rule. and are the position vectors of the reference satellite and spacecraft with respect to SSB, respectively. and are the radiation directions of the pulsars. d is the range between the spacecraft and the reference satellite, which is used as an additional observation to augment the XPNAV.
The pseudo range measurement error of the reference satellite with respect to SSB can be considered to be approximately equal to that of the spacecraft to SSB. If the reference satellite uses its known position to estimate the measurement error and provides the measurement error to the spacecraft in the form of a correction value, it is expected to improve the position accuracy of the spacecraft.
2.1. Pulsar Timing Observation
Let
be the reference satellite’s estimation position vector. The X-ray detector installed on the reference satellite receives the X-ray photon and records its time of arrival. The pulsar phase revolution model is established at the SSB to predict the TOA of the pulsar pulse. The measured pulse TOA at the reference satellite should be transformed to the same time framework at the SSB. By comparing the predicted TOA of pulsar pulse with the measured TOA, the position of the reference satellite can be obtained. Taking into account that the gravity of the Sun is the main gravity source in the solar system, the geometric and relativistic effects cannot be ignored. The simplified TOA transfer equation from the reference satellite to the SSB is given by [
1,
25].
where
and
are the TOAs of the SSB and the reference satellite, respectively.
and
are the position vectors of the reference satellite and the Sun with respect to SSB, respectively.
is the radiation direction of the pulsar and
is the solar gravitational constant.
is the distance between the first pulsar and SSB.
c is the speed of light.
is calculated using the TOA of the pulsar signal. It contains various errors stemming from the timing, phase comparison and so on. In Earth’s orbit, these measurement errors can be considered as approximations. So, if these errors can be extracted, they can be used to correct the position estimation of other satellites.
Suppose
is the precise position vector of the reference satellite, which is known by ground measurement equipment. With the exact position vector, the exact TOA transfer equation from the reference satellite to the SSB is obtained.
Subtracting Equation (2) from Equation (1) yields the time difference between the actual and observation times of the reference satellite, which can be expressed as follows:
where
.
is measured using the TOA of the pulsar signal and
is the position vector of the reference satellite. So,
can be treated as the differential correction value. Generally,
is in the order of
and
is in the order
. However, in the solar system
is in the order of
.
is
. At present, the positioning accuracy of X-ray pulsar is better than
. Assuming
is
, the values of
with the order of magnitude
and
with the order of magnitude
are negligible. The values of
are in the order of magnitude
, so that
can be considered equal to
. Thus, Equation (3) can be rewritten as
Suppose
is the estimation position vector of the spacecraft with respect to SSB and
is the actual position vector of the spacecraft with respect to SSB.
where
.
At present, the positioning accuracy of X-ray pulsar is better than
, assuming
is
. For the reference satellite and spacecraft, they observe the same pulsar and have the same phase revolution model. From
Figure 1, the distance between the reference satellite and spacecraft can be written as
. Because they belong to the same Earth satellite, the maximum distance between them is in the order of
. Moreover, the pulsar is far away from the solar system (in the order of
), which is far greater than the distance between the reference satellite and spacecraft. The radiation direction of the pulsar observed at any point in the solar system is essentially the same, which can be approximated as a constant vector. The influence of relativistic effects on
is negligible. Therefore,
can be considered to be approximately equal to
. It can be considered that the measurement errors of different spacecrafts in the solar system are equal, that is,
. So, we can use the reference satellite’s known precise position to obtain the measurement error; then, as a correction, the measurement error is transmitted to the spacecraft and the common error terms in the TOA can be eliminated in the spacecraft. This paper takes advantage of the difference time to improve the state accuracy of spacecraft.
Based on the above analysis, the spacecraft measures the TOA, which can be used to determine the position by calculating the flying time of the pulse between the spacecraft and SSB.
where
is the estimation position vector of the spacecraft with respect to SSB.
The time correction
is transmitted to the spacecraft through XCOM. Then, the spacecraft recovers the time correction from the communication data. Subtracting the time correction from the measurement time, the accurate TOA is obtained.
where
. Equation (7) is rewritten as
where
2.2. Ranging Observation Based on XCOM
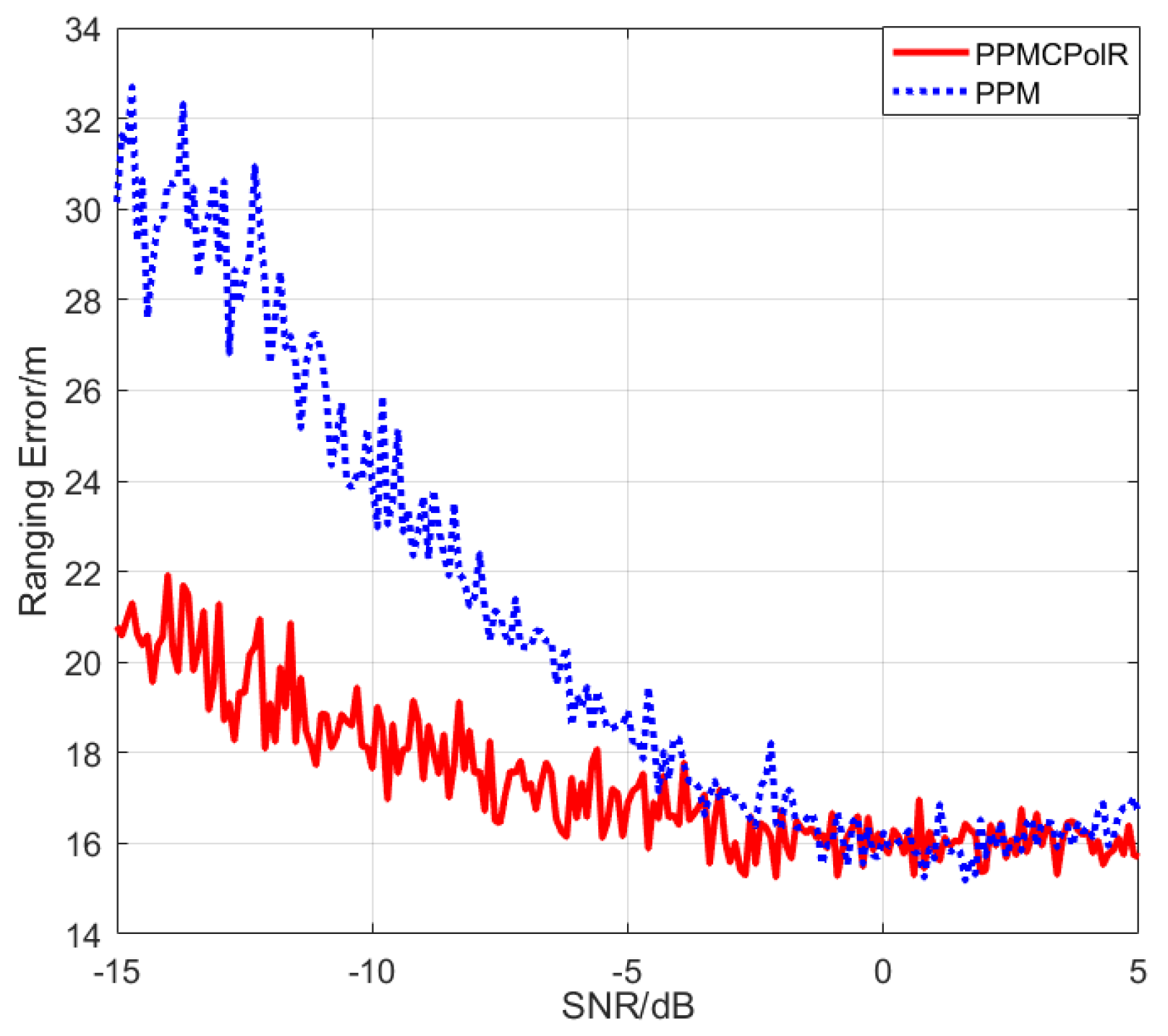
In this paper, the range between the spacecraft and the reference satellite near the Earth is utilized as an observation to improve the performance of XPNAV. For the range measurement, OOK or PPM can be used in the space X-ray communication system, but space background light, channel interference, photon fluctuation and various noises of the detector will affect the BER. The idea of X-ray PPM polarization coding is proposed, which can reduce the influence of deep space environment factors, improve X-ray communication capacity and effectively suppress the BER of the system. The principle of the PPM polarization ranging method based on XCOM will be illustrated in the following sections.
2.2.1. Principle of PPM Polarization Modulation
In the XCOM system, information is loaded on X-ray photons. At present, the main method is to transfer digital signals by modulating the intensity of light. Polarization is the inherent property of light, and the polarization state is an independent parameter of light, reflecting the vector characteristics of light. There is a strict phase relationship between the vibration components of the fully polarized light along different directions. The overall drift of the polarized state will not change the relative position of each polarized state, so it has a strong anti-interference ability. Therefore, the polarization state of signal light can be modulated, and different polarization states can be used to carry different information, for example, two orthogonal circular polarization states carry 2-bit information, and four elliptical polarization states to carry 4-bit information. The output signal after polarization modulation is an optical pulse with equal intensity but different polarization states.
PPM maps n-bit binary data sets to one slot in a frame [
26]. The transmitted information is represented by the slot position of the optical pulse. If the n-bit data group is written as
,
indicates the slot position; then, the mapping coding relationship of the monopulse PPM modulation can be written as
,
, that is
where
,
is the modulated signal,
is the pulse power and
is the slot duration.
For example, to the 4PPM modulation,
. If
, then
;
,
;
,
; and
,
.
matches the 0th slot; similarly,
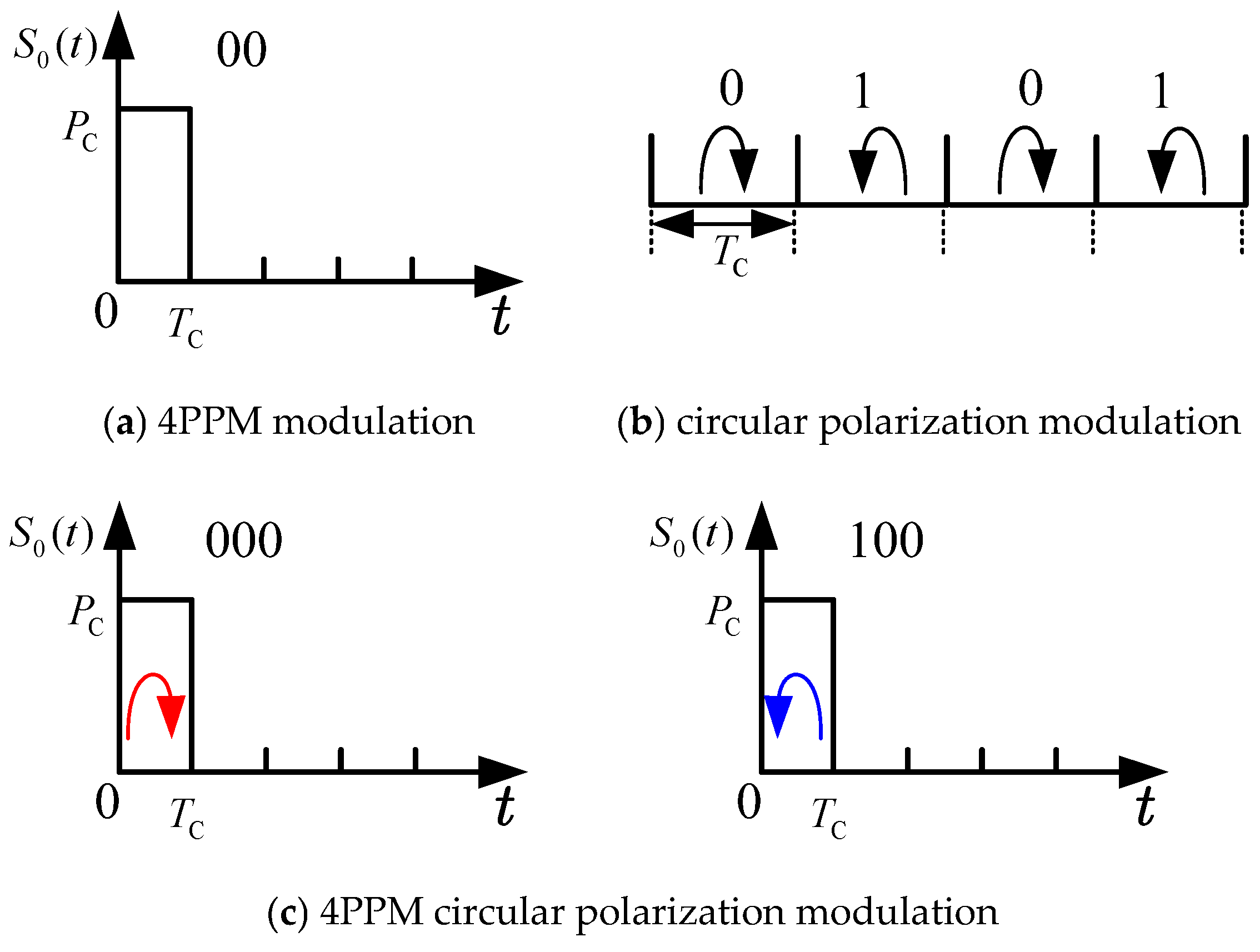
show the 1st, 2nd and 3rd slot positions, respectively. As shown in
Figure 2a,
indicates the modulation signal corresponding to the 0th slot. The amount of information that the 4PPM modulation can represent is 2 bits. The total number of bits of information transmitted by an L-bit PPM modulation signal is
.
The method of 4PPM circular polarization modulation proposed in this paper is to add circular polarization information on the basis of 4PPM modulation.
We can express the circularly polarized signal as [
27,
28,
29].
where
and
are the amplitudes of the light vector components and
is the phase error between the two light vector components, which can be defined as
When
,
represents the left-hand polarization state. When
, it is the right-hand polarization state. As shown in
Figure 2b, the amount of information that circular polarization modulation can represent is 1 bit.
For example, the pulses mapped at the 0th slot position can be represented by left-hand or right-hand polarization. As shown in
Figure 2c, when the polarization state is left-hand, the signal can be expressed as
, while if the polarization state is right-hand, the signal can be expressed as
. For the pulses at the rest of the slot positions, the signal can be expressed in the same way. It can be shown that the total amount of information transmitted by the 4PPM circularly polarized modulation signal is 3 bits. Generally speaking, the total amount of information transmitted by the L-bit PPM circular polarization modulation signal is
.
2.2.2. Ranging Observation
In this paper, the XCOM range measurement is a two-way measurement. The ranging sequence is transmitted to the slave station and sent back to the master station. The beam splitter and synthesizer are available devices in optical communication [
13,
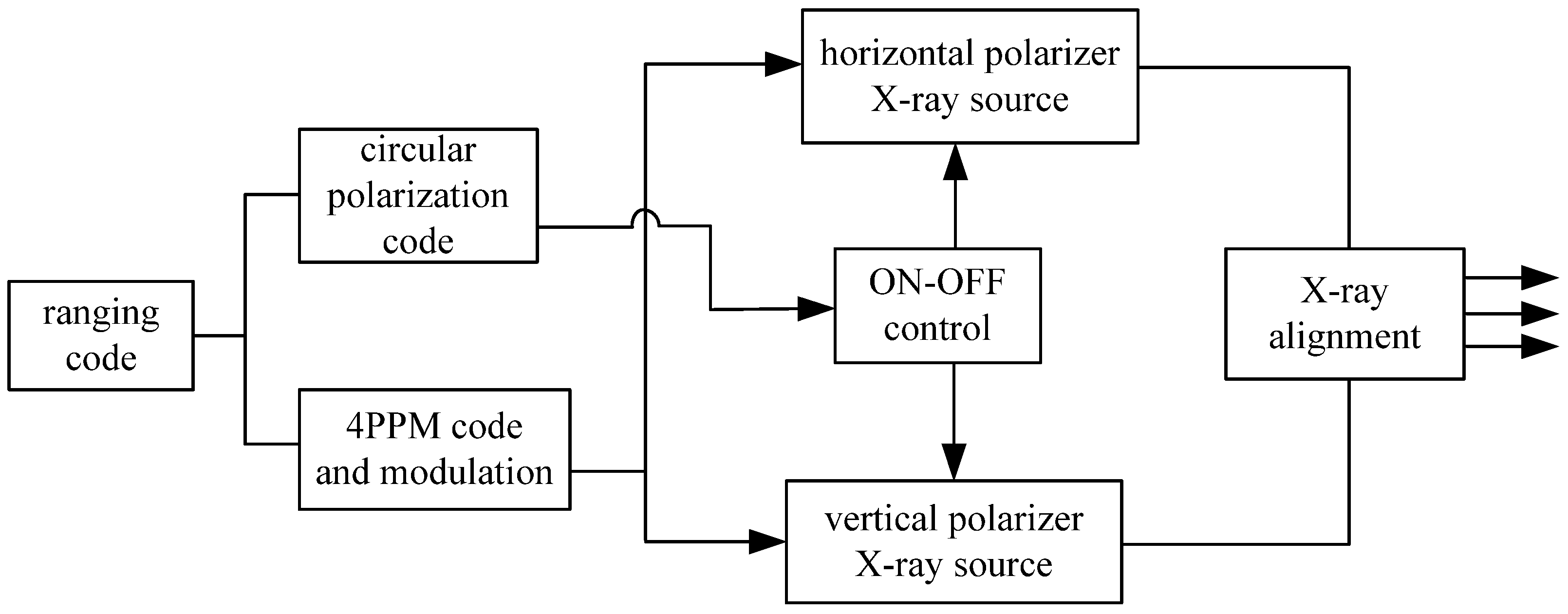
22], but both devices cannot realize the synthesis and separation of X-ray photons. The structure of modulation and demodulation for the X-ray ranging signal is explained below. The block diagram of the 4PPM polarization modulation is shown in
Figure 3.
First, the ranging code is divided into groups of 3 bits. Then, the lower 2 bits are encoded by 4PPM and the higher 1 bit is encoded by circular polarization, the ON–OFF control unit is used to select horizontal or vertical polarization modulation for the X-ray source and finally, after beam combination and collimation, the modulated signal is transmitted.
The ranging sequence is defined as
where
is the ranging code,
M is its length,
is the slot duration and
is the gate signal, which can be defined as
The T4B pseudo-noise code is selected as the ranging code, which can provide high ranging accuracy. The m-sequence is chosen as the synchronization sequence of the PPM coding.
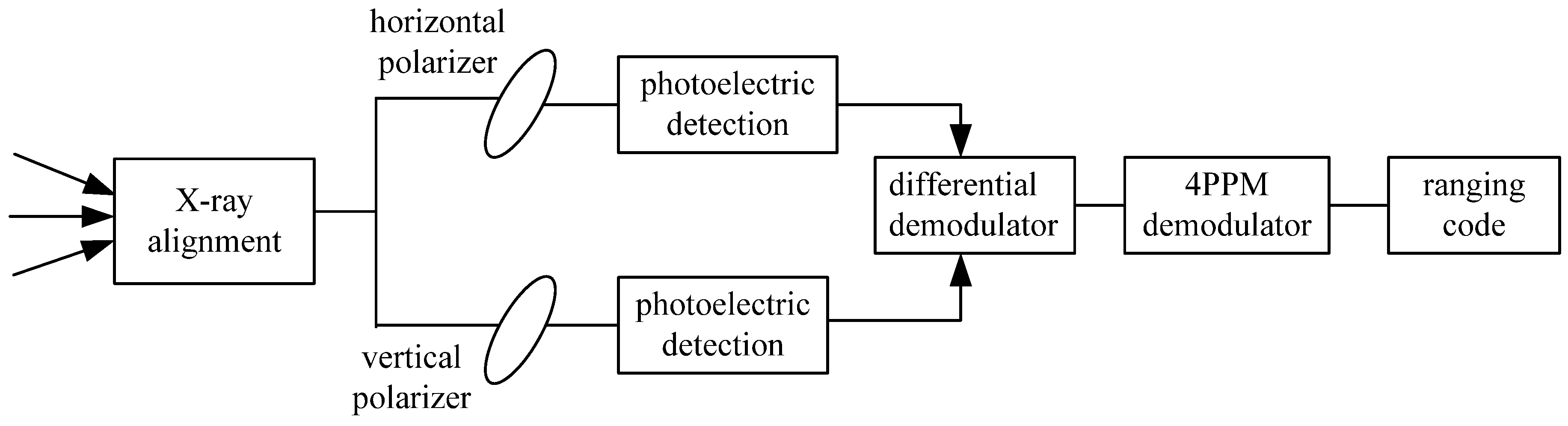
The X-ray ranging signal arrives at the slave station through propagation in the space channel. The block diagram of signal detection and demodulation is shown in
Figure 4.
The light beam is collected and received by X-ray alignment devices. Then, the orthogonal linear polarized light can be divided into two independent channels [
30,
31,
32]. The output intensity of the two signals is detected by a photoelectric detector. The left-hand and right-hand circular polarization states can be effectively detected, and then the ranging sequence information is demodulated.
The signal is received and demodulated at the slave station, and the demodulated signal is re-modulated and sent back to the master station, so as to eliminate the influence of link noise and signal attenuation and improve the ranging performance. Let
denote the sequence of ranging obtained by demodulation of the master station, which can be denoted as
where
is the ranging code recovered from the main station and
is the bidirectional transmission time delay between the master and slave stations.
By pairing up the received sequence with the local sequence at the master station, we can obtain the two-way light travel time
. Subsequently, the unidirectional range can be calculated by
where
is the speed of light.
2.2.3. Analysis of Ranging Error
Ranging error is an important index to measure the performance of the ranging system. Many factors will affect ranging performance, such as the Doppler effect, signal differential detection error, correlation error and so on [
17]. This paper focuses on the influence of correlation errors on ranging performance.
As mentioned above, the
should be correlated with each code component and its delay component of
to obtain the bidirectional time delay
. Because of the influence of noise, the time measurement error will occur when the signal is correlated. This paper takes the clock code component of the ranging code as an example to analyze. Because the clock code component is essentially a series of square waves, due to the effect of noise, its waveform will be deformed to some extent. The clock code component is modeled as [
33].
where
is the power of the clock code component,
is the angular frequency,
is Gauss white noise and its power spectral density is
.
Suppose
is the result of the correlation between the clock code component and its in phase component, and
is the orthogonal component. They can be expressed as
Based on Equations (17) and (18), the time delay is calculated as
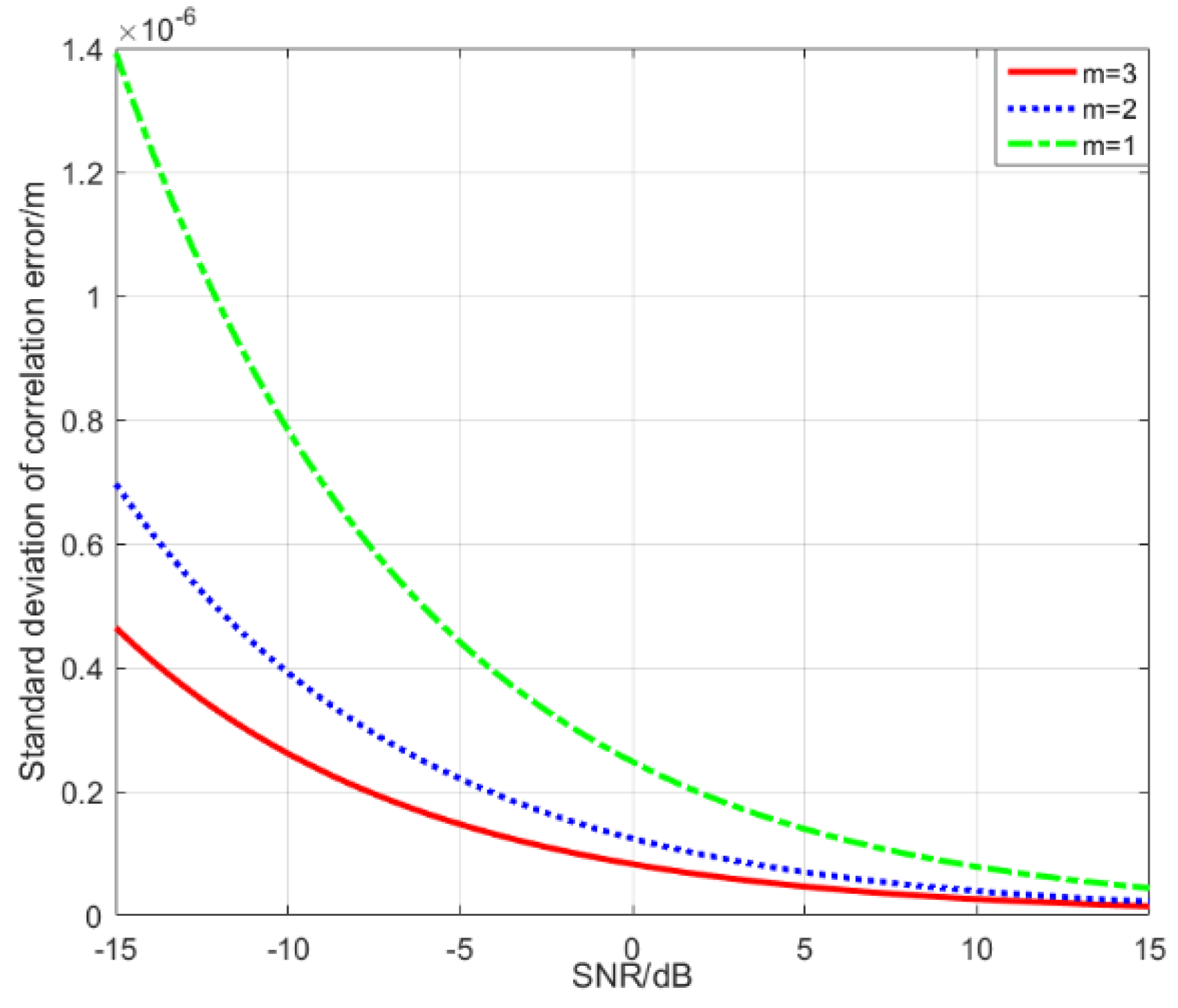
The variance of the time delay can be expressed as
Substituting Equations (17) and (18) into Equation (19), it can be rewritten as follows:
The signal-to-noise ratio of the clock code component can be defined as
The standard deviation of the time delay can be expressed as
where
is the period of the clock code component.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}