

Study on the Test and Adjustment Method of Civil Aircraft Taxiing Deviation


Abstract
1. Introduction
2. Materials and Methods
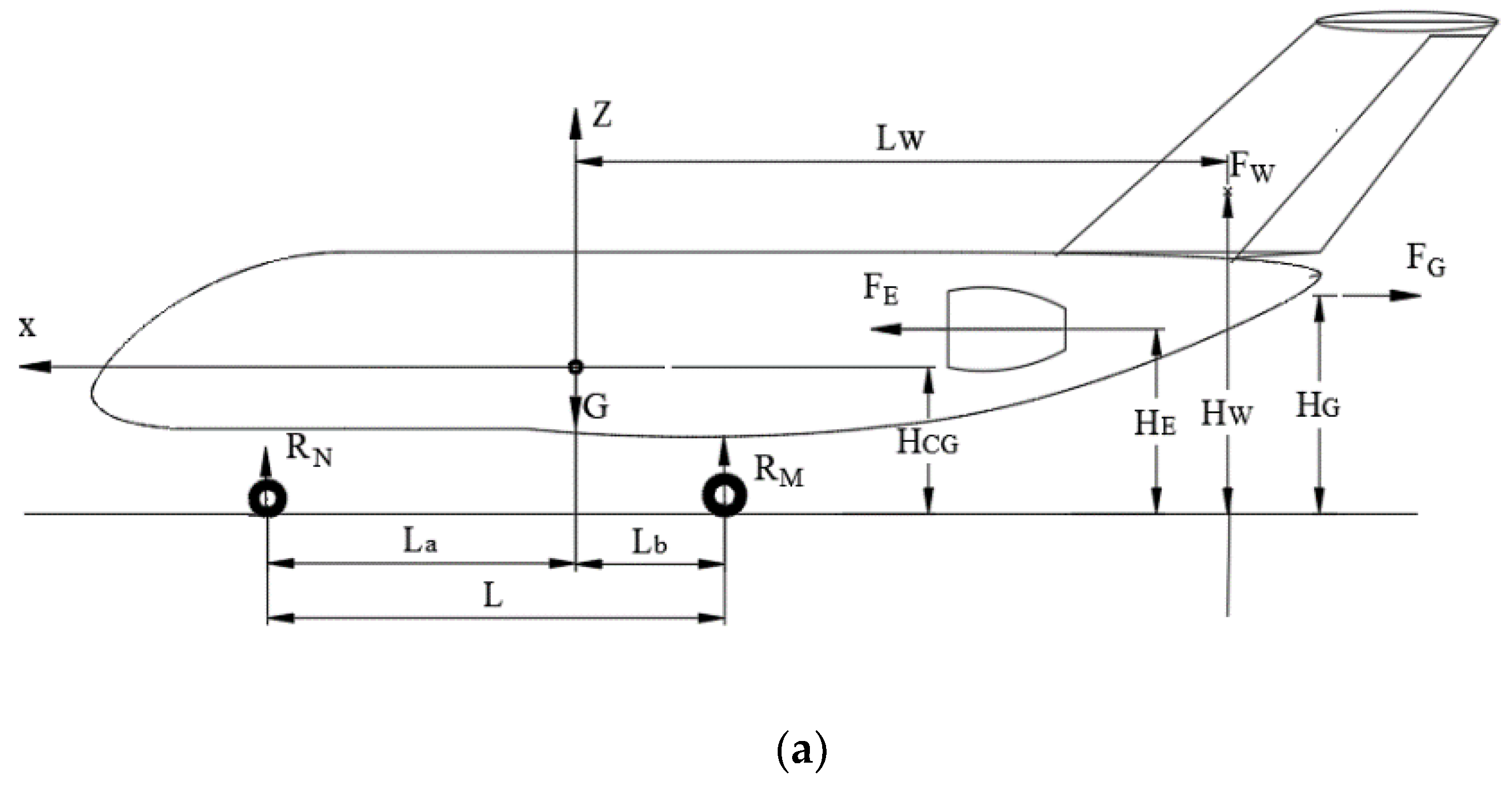
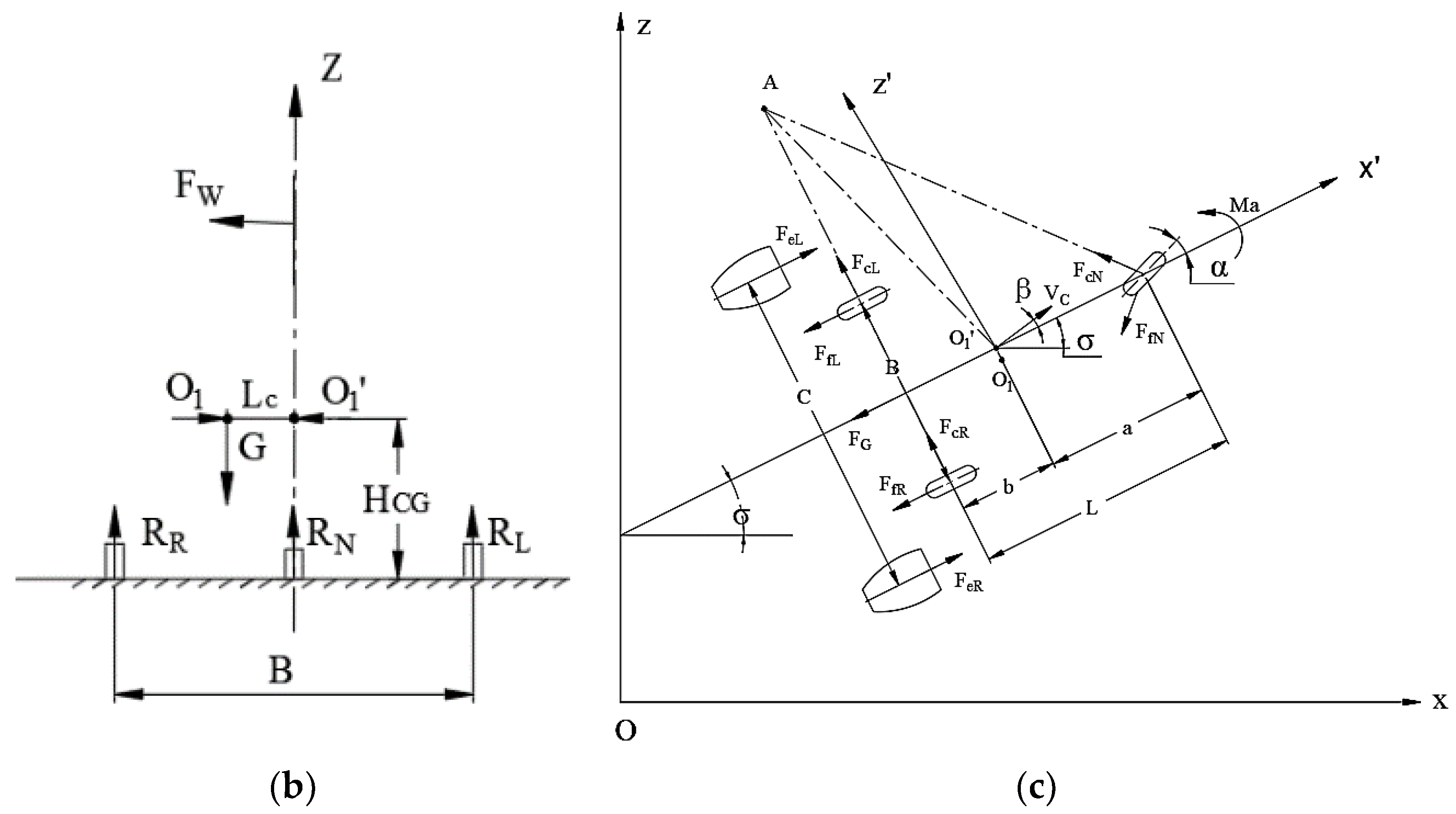
2.1. Ground Dynamics Model
2.1.1. Model Assumption
- The dual-wheel tire configuration is simplified to a single wheel.
- The tire and landing gear structure are modeled as rigid bodies.
- The aerodynamic effects of the elevator and aileron are neglected.
- The impact of the engine mounting angle is disregarded.
- The runway is assumed to be perfectly horizontal.
2.1.2. Mathematical Model
- Reducing the unbalance aerodynamic moment : this can be achieved by adjusting the horizontal degree of the left and right wings and the horizontal tail, as well as the vertical tail;
- Reducing the asymmetry of the aircraft thrust and : this can be achieved by adjusting the consistency of the left and right engine speeds under the same engine thrust command;
- Reducing : achieved by adjusting the longitudinal balance of fuel and cargo, etc.;
- Increasing the coefficient of friction : by changing the tire with new one to increase the friction.
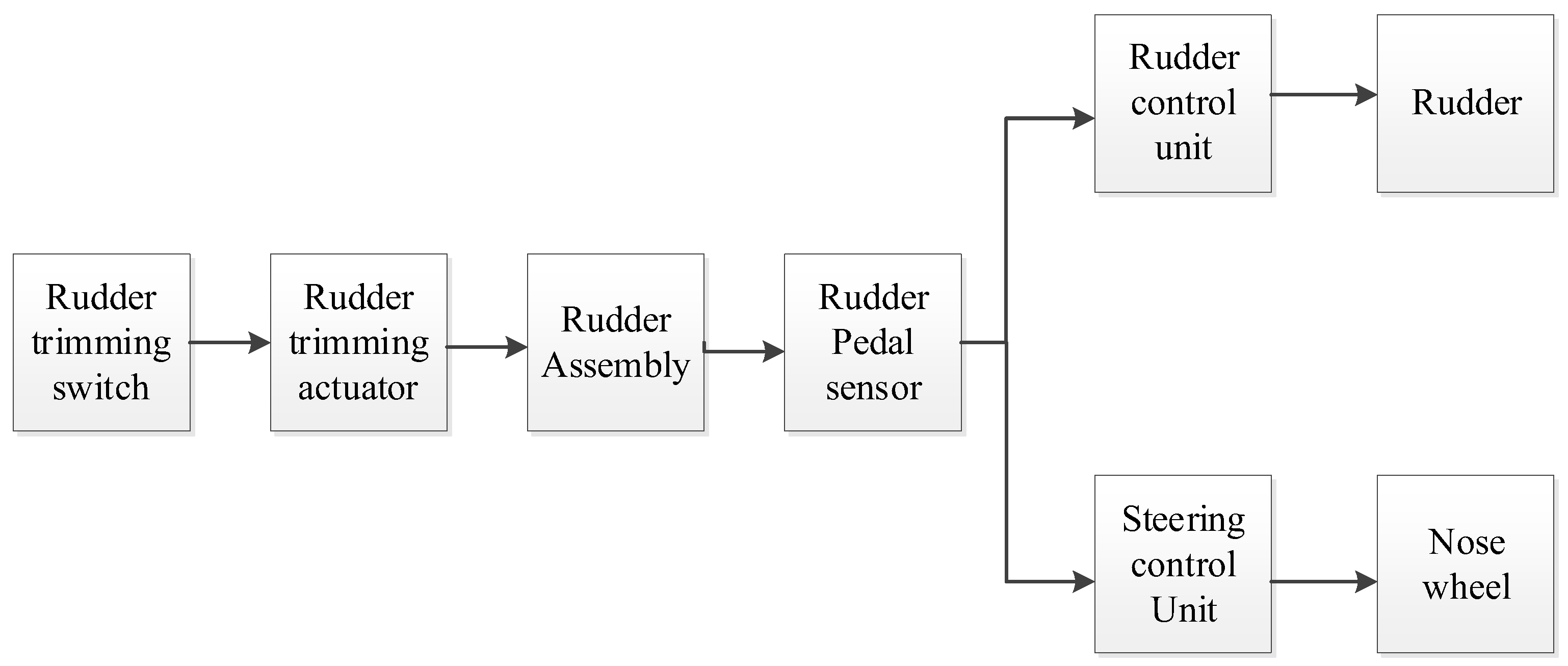
2.2. Aircraft Trimming Test Method
2.2.1. Test Fundamentals
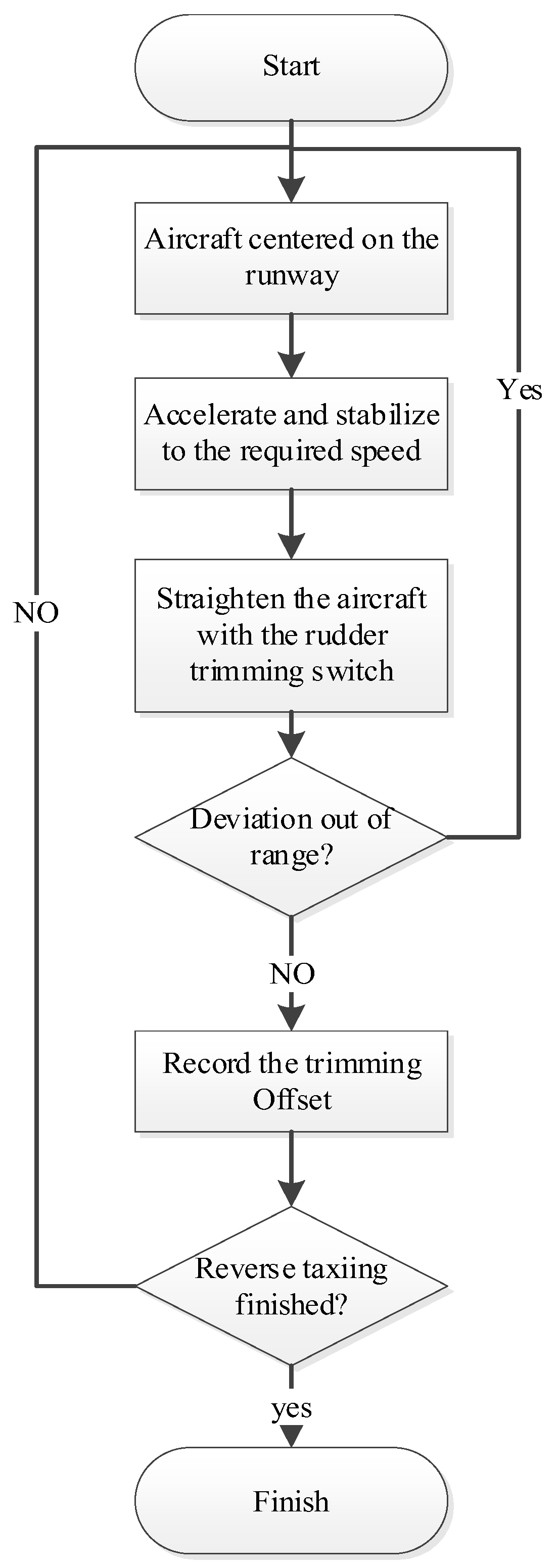
2.2.2. Test Procedure
- First, taxi the aircraft to the centerline of the runway using the nose wheel steering function, ensuring that the nose of the aircraft is aligned with the runway centerline. This step can prevent any impact on test accuracy due to the “turtle-back” structure of the runway, which is higher in the middle and lower on the sides.
- Once the aircraft is aligned with the runway, adjust its speed using the throttle lever. The speed should be moderate, because it should be high enough to conduct the test effectively but low enough to minimize the risk of runway deviation and reduce the influence of aerodynamic forces on the test.
- Use the rudder trimming switch to adjust the trimming angle X1, so that the aircraft maintains straight-line taxiing.
- Observe whether the aircraft’s lateral deviation exceeds the standard, typically requiring that the deviation be no more than 4.5 m over 10 s. If the deviation exceeds this standard, the trimming test must be repeated.
- If the deviation is within the acceptable range, record the rudder trimming amount X1.
- Turn the aircraft around, perform reverse taxiing with same period runway as step (1) to step (5), and record the trimming angle X2.
3. Results
3.1. Test Sample and Result
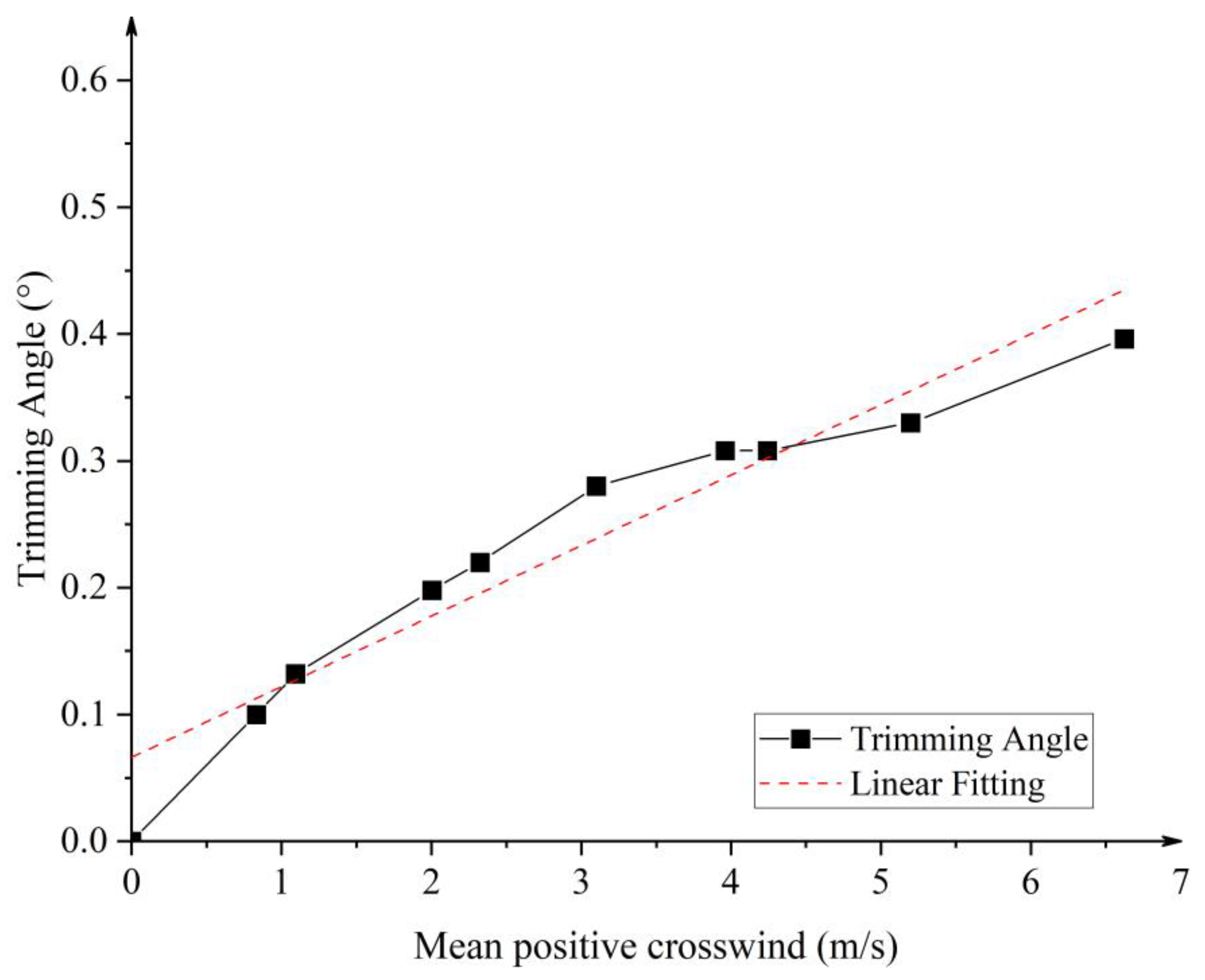
3.2. Analysis of the Impact of Crosswind
3.3. Aircraft Trimming Adjustment Methods
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Vorobyeva, O.; Bartok, J.; Šišan, P.; Nechaj, P.; Gera, M.; Kelemen, M.; Polishchuk, V.; Gaál, L. Assessing the contribution of data mining methods to avoid aircraft run-off from the runway to increase the safety and reduce the negative environmental impacts. Int. J. Environ. Res. Public Health 2020, 17, 796. [Google Scholar] [CrossRef] [PubMed]
- IATA. Runway Safety Accident Analysis Report 2010–2014, 1st ed.; IATA: Montreal, QC, Canada, 2015. [Google Scholar]
- Available online: https://aviation-safety.net/database[DB/OL] (accessed on 1 May 2024).
- Huo, Z.-Q.; Ru, Y.; Han, S.-C. A model for analyzing runway deviation events during the landing phase of civil aviation transportation aircraft. J. Southwest Jiaotong Univ. 2012, 47, 895–900. [Google Scholar]
- Wang, F.; Yuan, J.; Liu, X.; Wang, P.; Xu, M.; Li, X.; Li, H. Impacts of Flight Operations on the Risk of Runway Excursions. Appl. Sci. 2024, 14, 975. [Google Scholar] [CrossRef]
- Huo, Z. Research on the cause analysis and prevention strategy of runway deviation of civil aviation transportation aircraft. In Management Science and Engineering (MSE 2011 V6); Information Engineering Research Institute: Chengdu, China, 2011; pp. 247–252. [Google Scholar]
- Zhang, L.; Huang, Q.; Jiang, H.; Han, J. Trimming aircraft on the ground based on the hybrid genetic algorithm. Trans. Jpn. Soc. Aeronaut. Space Sci. 2009, 52, 117–124. [Google Scholar]
- De Marco, A.; Duke, E.; Berndt, J. A general solution to the aircraft trim problem. In Proceedings of the AIAA Modeling and Simulation Technologies Conference and Exhibit, Hilton Head, SC, USA, 20–23 August 2007; p. 6703. [Google Scholar]
- Ma, D.; Nie, H.; Zhang, M. Study of deflection correction of civil aircraft under the influence of crosswind. Flight Mech. 2013, 31, 23. [Google Scholar]
- Liu, H.; Wang, L. Evaluation of ground heading maneuvering stability characteristics of civil aircraft landing in crosswind based on digital virtual flight. J. Beijing Univ. Aeronaut. Astronaut. 2018, 44, 516–525. [Google Scholar]
- Yuan, Z.; Wang, Y. A design of airplane’s integrated ground directional system with fuzzy control. In Proceedings of the 2009 Sixth International Conference on Fuzzy Systems and Knowledge Discovery, Tianjin, China, 14–16 August 2009. [Google Scholar]
- He, H. Research on Longitudinal Control Technology for Automatic Landing of Unmanned Aircraft; Nanjing University of Science and Technology: Nanjing, China, 2008. [Google Scholar]
- Zhang, M. Research on Some Key Technologies of Aircraft Ground Dynamics; Nanjing University of Aeronautics and Astronautics: Nanjing, China, 2009. [Google Scholar]
- Zhao, Z.; Wang, H.; Li, L.; Jiang, Y. A study of ground maneuver stability of multiple-bogie undercarriage. In Proceedings of the 2016 IEEE International Conference on Aircraft Utility Systems (AUS), Beijing, China, 10–12 October 2016; pp. 362–366. [Google Scholar]
- Zhou, J. Research on the calculation method of nose wheel steering deviation angle of a certain type of civil aircraft. Sci. Technol. View 2018, 29, 21–22. [Google Scholar]
- Duprez, J.; Mora-Camino, F.; Villaumé, F. Aircraft-on-Ground Lateral Control for Low Speed Maneuvers. Ifac Proc. Vol. 2004, 37, 475–480. [Google Scholar] [CrossRef]
- Aircraft Design Manual: Volume 14, Takeoff and Landing System Design; Aviation Industry Press: Beijing, China, 2002; pp. 38–79.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Point | Nose Wheel Presetting Deflection Angle (°) | Measured Value of Trimming Quantity X1 (°) | Measured Value of Trimming Quantity X2 (°) | Theoretical Trimming Angle (°) | Measured Trimming Angle (°) | Theoretical and Actual Error (°) | Crosswind Equivalent Deflection Angle Δα (°) |
|---|---|---|---|---|---|---|---|
| 1 | −1 | 0.9 | −0.4 | 0.2 | 0.1 | 0.1 | 0.3 |
| 2 | −0.7 | 0.2 | −0.8 | −0.1 | −0.1 | 0.0 | 0.2 |
| 3 | −0.3 | −1 | −2.2 | −0.5 | −0.7 | 0.2 | 0.3 |
| 4 | 0.1 | −1.6 | −2.6 | −0.9 | −0.9 | 0.0 | 0.2 |
| 5 | 0.5 | −2.7 | −3.7 | −1.3 | −1.4 | 0.1 | 0.2 |
| 6 | 1 | −3.7 | −4.9 | −1.8 | −1.9 | 0.1 | 0.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, W.; Chen, Y.; Xu, Y.; Jiang, Y. Study on the Test and Adjustment Method of Civil Aircraft Taxiing Deviation. Aerospace 2024, 11, 732. https://doi.org/10.3390/aerospace11090732
Chen W, Chen Y, Xu Y, Jiang Y. Study on the Test and Adjustment Method of Civil Aircraft Taxiing Deviation. Aerospace. 2024; 11(9):732. https://doi.org/10.3390/aerospace11090732
Chicago/Turabian StyleChen, Wenjie, Yong Chen, Yongxiang Xu, and Yimin Jiang. 2024. "Study on the Test and Adjustment Method of Civil Aircraft Taxiing Deviation" Aerospace 11, no. 9: 732. https://doi.org/10.3390/aerospace11090732
APA StyleChen, W., Chen, Y., Xu, Y., & Jiang, Y. (2024). Study on the Test and Adjustment Method of Civil Aircraft Taxiing Deviation. Aerospace, 11(9), 732. https://doi.org/10.3390/aerospace11090732