
Analysis of Bubble Flow in an Inclined Tube and Modeling of Flow Prediction


Abstract
1. Introduction
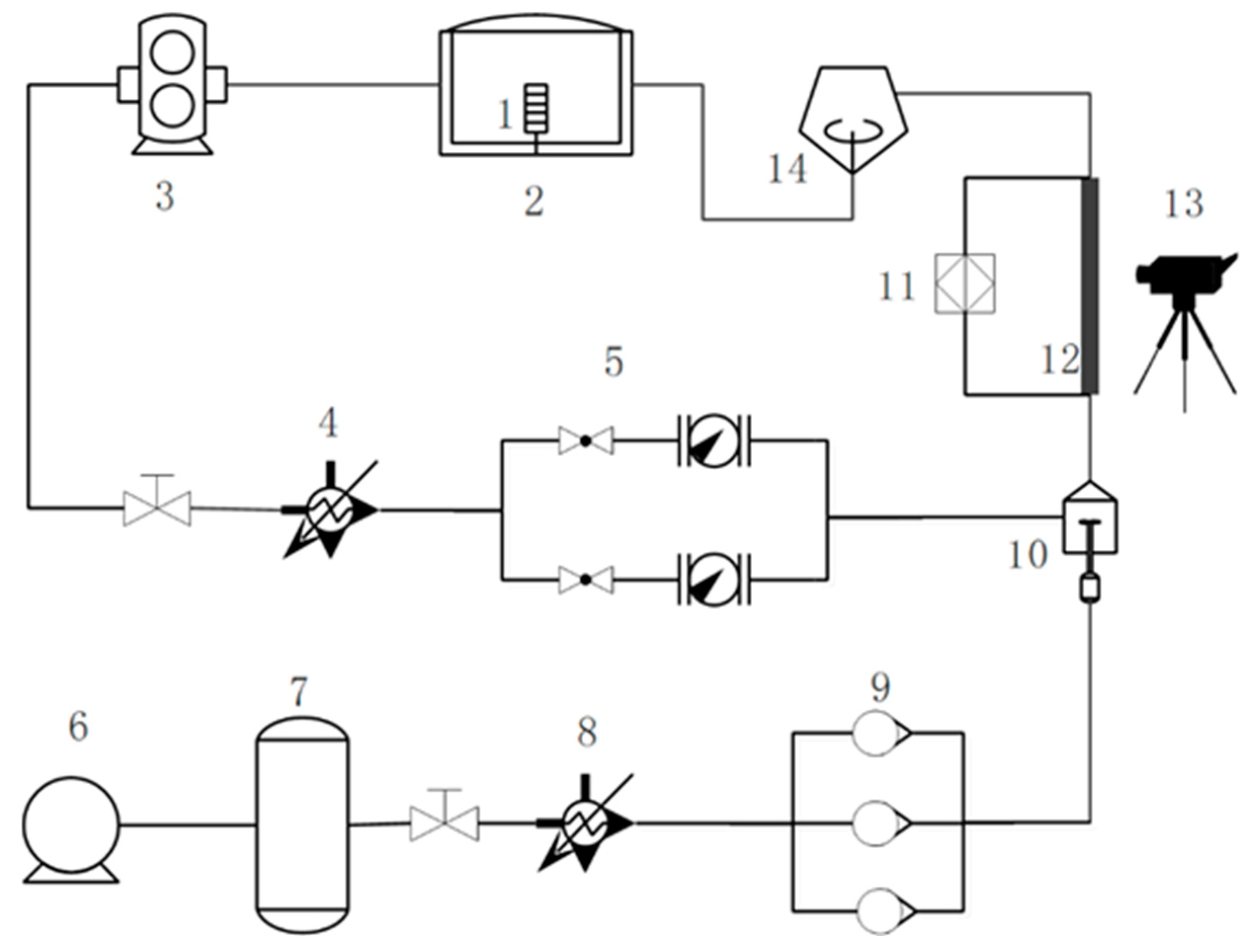
2. Visualization Test System
3. Results
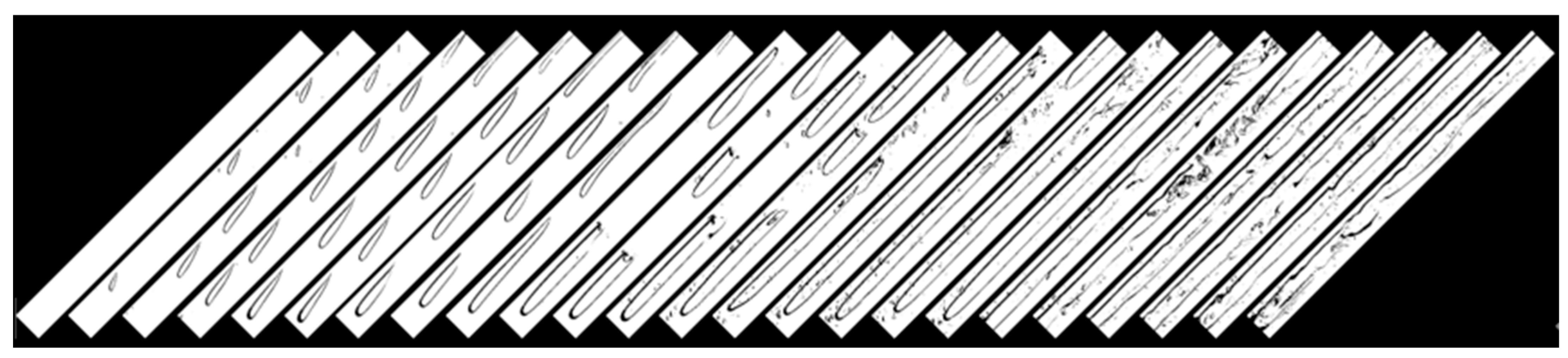
3.1. Experimental Study of Two-Phase Flow of Oil and Gas in Scavenge Pipe
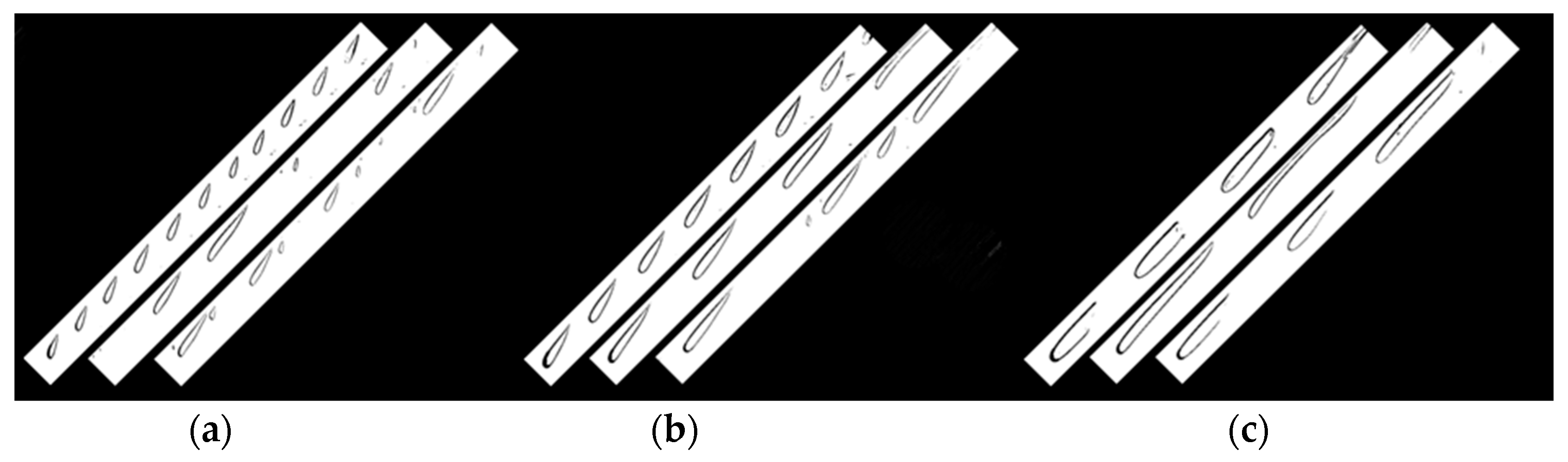
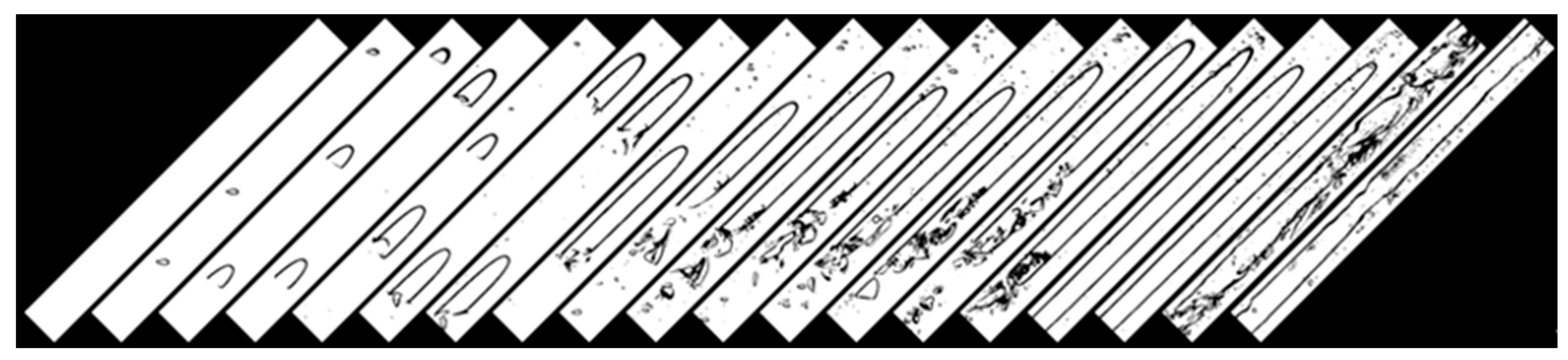
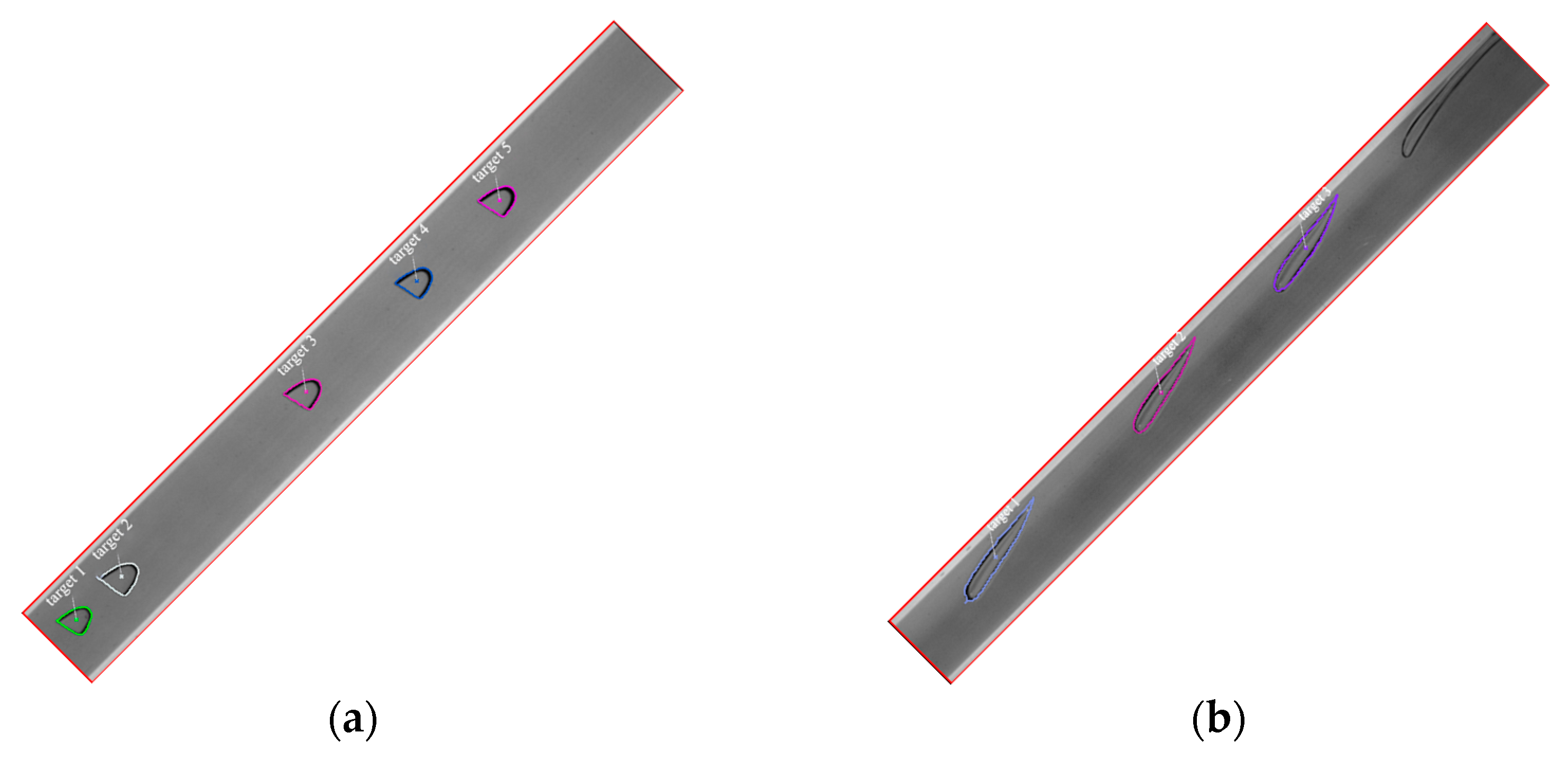
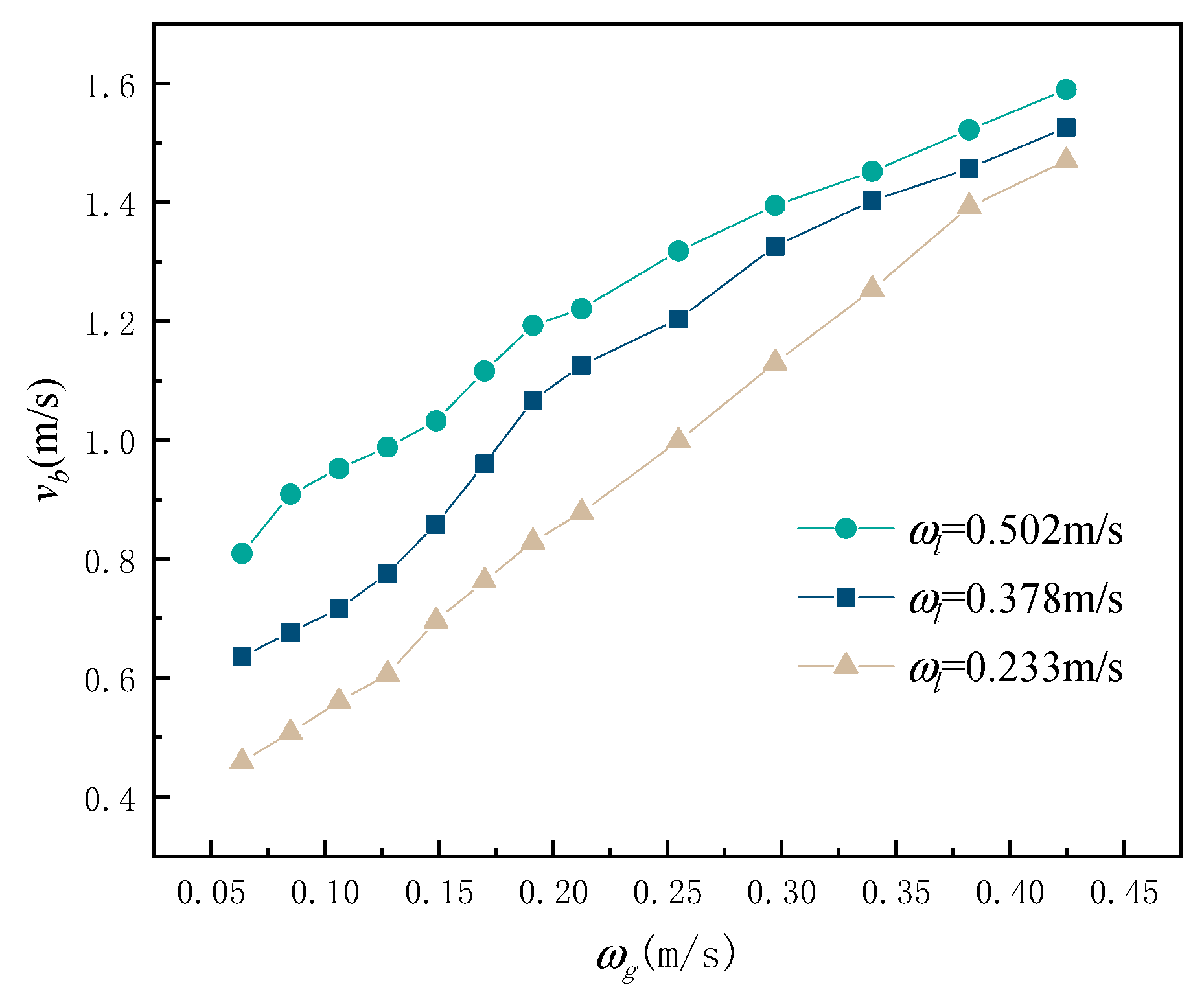
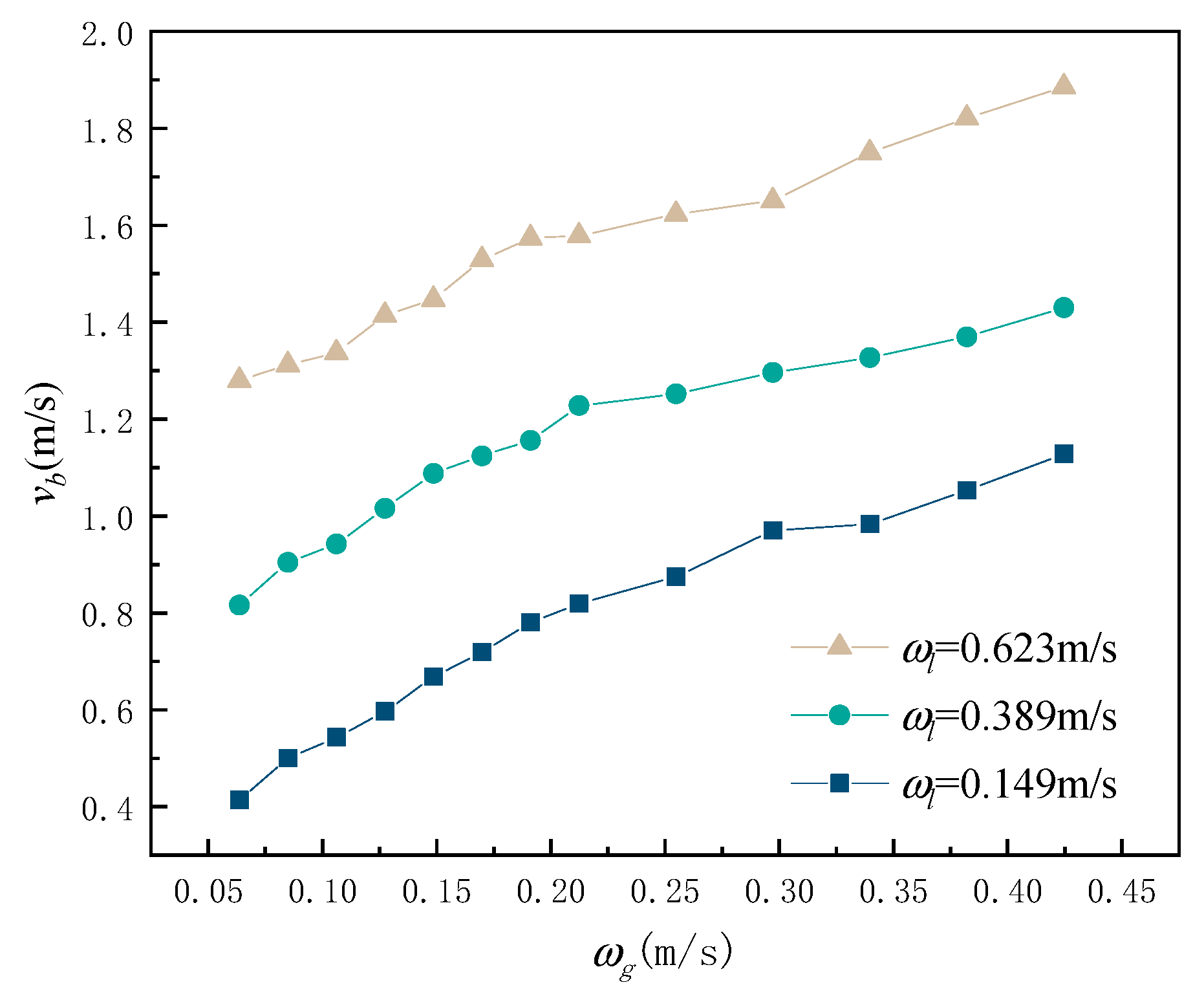
3.2. Analysis of Bubble Movement in Oil-Gas Two-Phase Flow Pipe
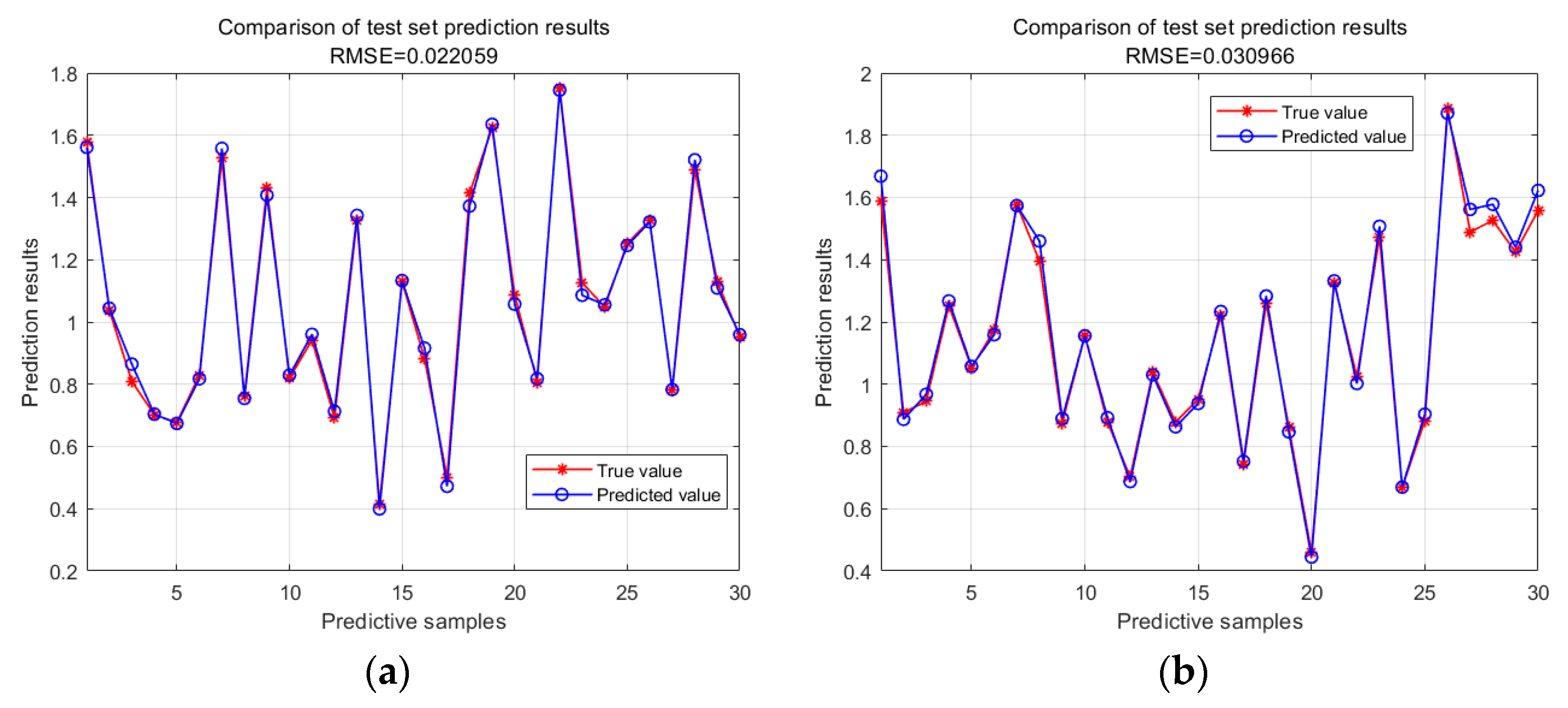
3.3. Establishing a Prediction Model for Bubble Flow inside a Pipe
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, G.Q. Present and future of aeroengine oil system. Aeroengine 2011, 6, 49–52. [Google Scholar]
- Peng, Q.; Guo, Y.-Q.; Sun, H. Modeling and Fault Diagnosis of Aero-engine Lubricating Oil System. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 5907–5912. [Google Scholar] [CrossRef]
- Chandra, B.; Simmons, K.; Pickering, S.; Collicott, S.H.; Wiedemann, N. Study of gas/liquid behavior within an aero enginebearing chamber. J. Eng. Gas Turbines Power 2013, 135, 051201. [Google Scholar] [CrossRef]
- Flouros, M.; Iatrou, G.; Yakinthos, K.; Cottier, F.; Hirschmann, M. Two-Phase Flow Heat Transfer and Pressure Drop in Horizontal Scavenge Pipes in an Aero-engine. J. Eng. Gas Turbines Power 2015, 137, 081901. [Google Scholar] [CrossRef]
- Mandhane, J.; Gregory, G.; Aziz, K. A flow pattern map for gas—Liquid flow in horizontal pipes. Int. J. Multiph. Flow 1974, 1, 537–553. [Google Scholar] [CrossRef]
- Hibiki, T.; Mishima, K. Flow regime transition criteria for upward two-phase flow in vertical narrow rectangular channels. Nucl. Eng. Des. 2001, 203, 117–131. [Google Scholar] [CrossRef]
- Mesa, D.; Quintanilla, P.; Reyes, F. Bubble Analyser-An open-source software for bubble size measurement using image analysis. Miner. Eng. 2022, 180, 107497. [Google Scholar] [CrossRef]
- Thaker, J.; Banerjee, J. Characterization of two-phase slug flow sub-regimes using flow visualization. J. Pet. Sci. Eng. 2015, 135, 561–576. [Google Scholar] [CrossRef]
- Rafałko, G.; Mosdorf, R.; Górski, G. Two-phase flow pattern identification in minichannels using image correlation analysis. Int. Commun. Heat Mass Transf. 2020, 113, 104508. [Google Scholar] [CrossRef]
- Dong, F.; Zhang, S.; Shi, X.; Wu, H.; Tan, C. Flow Regimes Identification-based Multidomain Features for Gas–Liquid Two-Phase Flow in Horizontal Pipe. IEEE Trans. Instrum. Meas. 2021, 70, 1–11. [Google Scholar] [CrossRef]
- De Giorgi, M.G.; Ficarella, A.; Lay-Ekuakille, A. Monitoring Cavitation Regime From Pressure and Optical Sensors: Comparing Methods Using Wavelet Decomposition for Signal Processing. IEEE Sensors J. 2015, 15, 4684–4691. [Google Scholar] [CrossRef]
- Ji, H.; Long, J.; Fu, Y.; Huang, Z.; Wang, B.; Li, H. Flow Pattern Identification Based on EMD and LS-SVM for Gas–Liquid Two-Phase Flow in a Minichannel. IEEE Trans. Instrum. Meas. 2011, 60, 1917–1924. [Google Scholar]
- Liang, X.; Wang, S.; Shen, W. Random Forest Model of Flow Pattern Identification in Scavenge Pipe Based on EEMD and Hilbert Transform. Energies 2023, 16, 6084. [Google Scholar] [CrossRef]
- Chen, R.-C.; Dewi, C.; Huang, S.-W.; Caraka, R.E. Selecting critical features for data classification based on machine learning methods. J. Big Data 2020, 7, 52. [Google Scholar] [CrossRef]
- Bacu, V.; Nandra, C.; Sabou, A.; Stefanut, T.; Gorgan, D. Assessment of Asteroid Classification Using Deep Convolutional Neural Networks. Aerospace 2023, 10, 752. [Google Scholar] [CrossRef]
- Yang, L.; Jia, G.; Zheng, K.; Wei, F.; Pan, X.; Chang, W.; Zhou, S. An Unmanned Aerial Vehicle Troubleshooting Mode Selection Method Based on SIF-SVM with Fault Phenomena Text Record. Aerospace 2021, 8, 347. [Google Scholar] [CrossRef]
- Chandra, M.A.; Bedi, S.S. Survey on SVM and their application in imageclassification. Int. J. Inf. Technol. 2021, 13, 1–11. [Google Scholar]
- Moura, M.d.C.; Zio, E.; Lins, I.D.; Droguett, E. Failure and reliability prediction by support vector machines regression of time series data. Reliab. Eng. Syst. Saf. 2011, 96, 1527–1534. [Google Scholar] [CrossRef]
- Steyerberg, E.W.; van der Ploeg, T.; Van Calster, B. Risk prediction with machine learning and regression methods. Biom. J. 2014, 56, 601–606. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.-C.; Feng, J.-W. Development and application of artificial neural network. Wirel. Pers. Commun. 2018, 102, 1645–1656. [Google Scholar] [CrossRef]
- Kawahara, A.; Sadatomi, M.; Nei, K.; Matsuo, H. Experimental study on bubble velocity, void fraction and pressure drop for gas–liquid two-phase flow in a circular microchannel. Int. J. Heat Fluid Flow 2009, 30, 831–841. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Physical Properties | Air | Oil |
|---|---|---|
| ρ (kg/s) | 0.954 | 1003.5 |
| µ (kg/m·s) | 2.18 × 10−5 | 0.0051 |
| Cp (J/kg·K) | 1.009 × 103 | 1880 |
| λ (W/m·K) | 0.0315 | 0.12 |
| Data Regression Prediction Model | RMSE | R2 |
|---|---|---|
| BP Neural Network | 0.022059 | 0.97367 |
| Radial Basis Function Neural Network | 0.042145 | 0.98577 |
| Random Forest | 0.13949 | 0.81611 |
| Support Vector Machine | 0.030966 | 0.99572 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, X.; Wang, S.; Shen, W. Analysis of Bubble Flow in an Inclined Tube and Modeling of Flow Prediction. Aerospace 2024, 11, 655. https://doi.org/10.3390/aerospace11080655
Liang X, Wang S, Shen W. Analysis of Bubble Flow in an Inclined Tube and Modeling of Flow Prediction. Aerospace. 2024; 11(8):655. https://doi.org/10.3390/aerospace11080655
Chicago/Turabian StyleLiang, Xiaodi, Suofang Wang, and Wenjie Shen. 2024. "Analysis of Bubble Flow in an Inclined Tube and Modeling of Flow Prediction" Aerospace 11, no. 8: 655. https://doi.org/10.3390/aerospace11080655
APA StyleLiang, X., Wang, S., & Shen, W. (2024). Analysis of Bubble Flow in an Inclined Tube and Modeling of Flow Prediction. Aerospace, 11(8), 655. https://doi.org/10.3390/aerospace11080655