
Time Optimal Altitude-Hold Flight Mode Transition Strategy for a Class of Ducted Fan Tail Sitter UAV


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- We first present a specific computation and analysis of the transition corridor with respect to the altitude-hold transition of a ducted fan tail sitter UAV. In order to accommodate aggressive maneuvers, the conventional dynamic transition corridor is extended to a higher-order one by considering the limitation of jerk.
- Based on the transition corridor, we propose an efficient strategy to generate a time optimal altitude-hold transition trajectory and adopt the existing full envelope controller [24] to track this trajectory. Simultaneously, a model-free control scheme is proposed to achieve the time optimal altitude-hold transitional flight without solving an optimization problem.
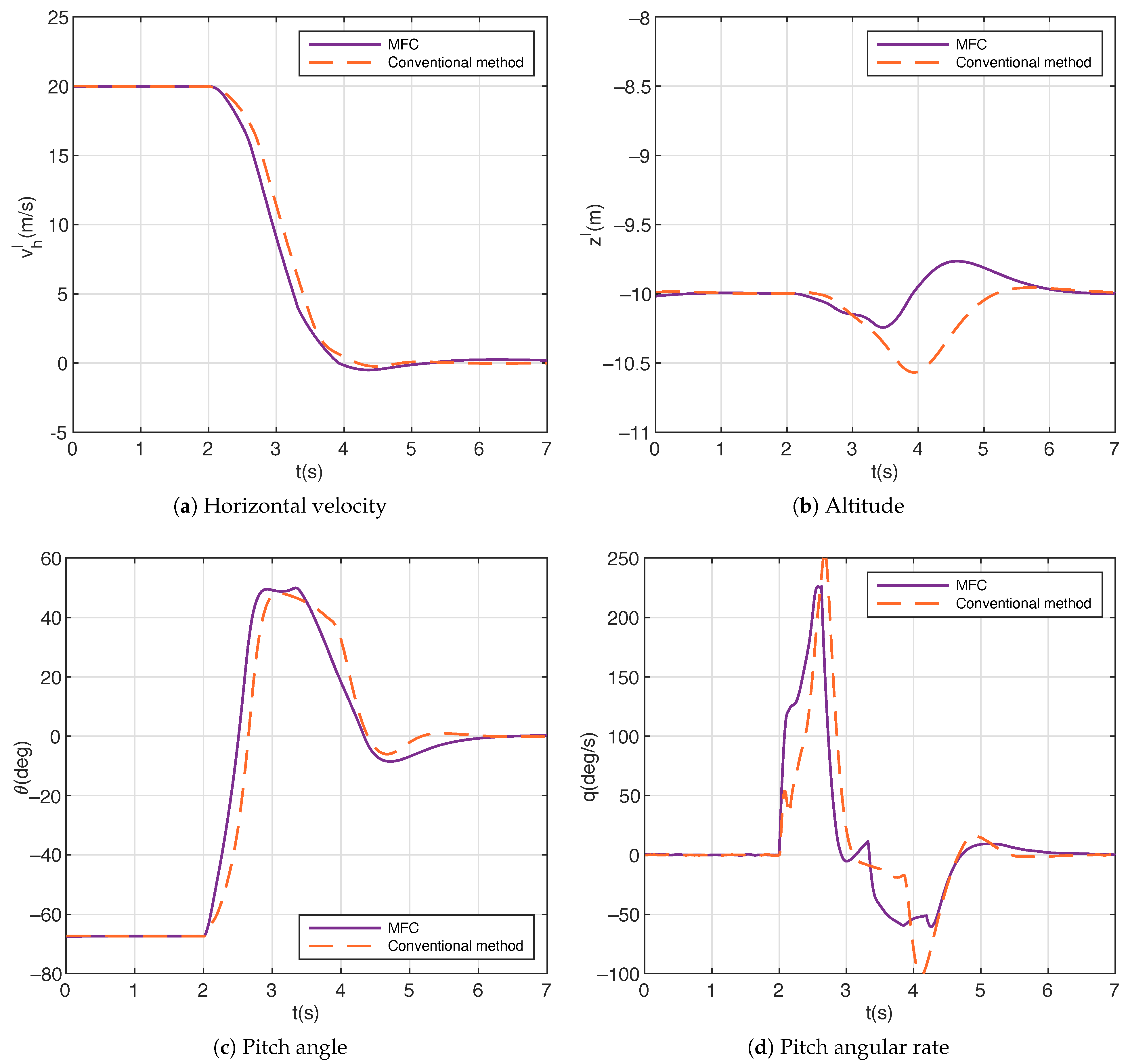
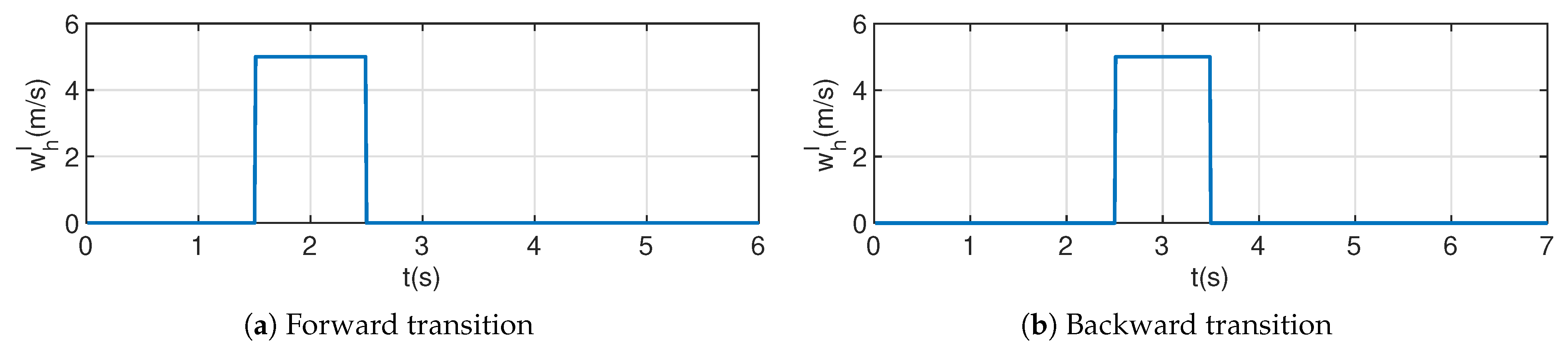
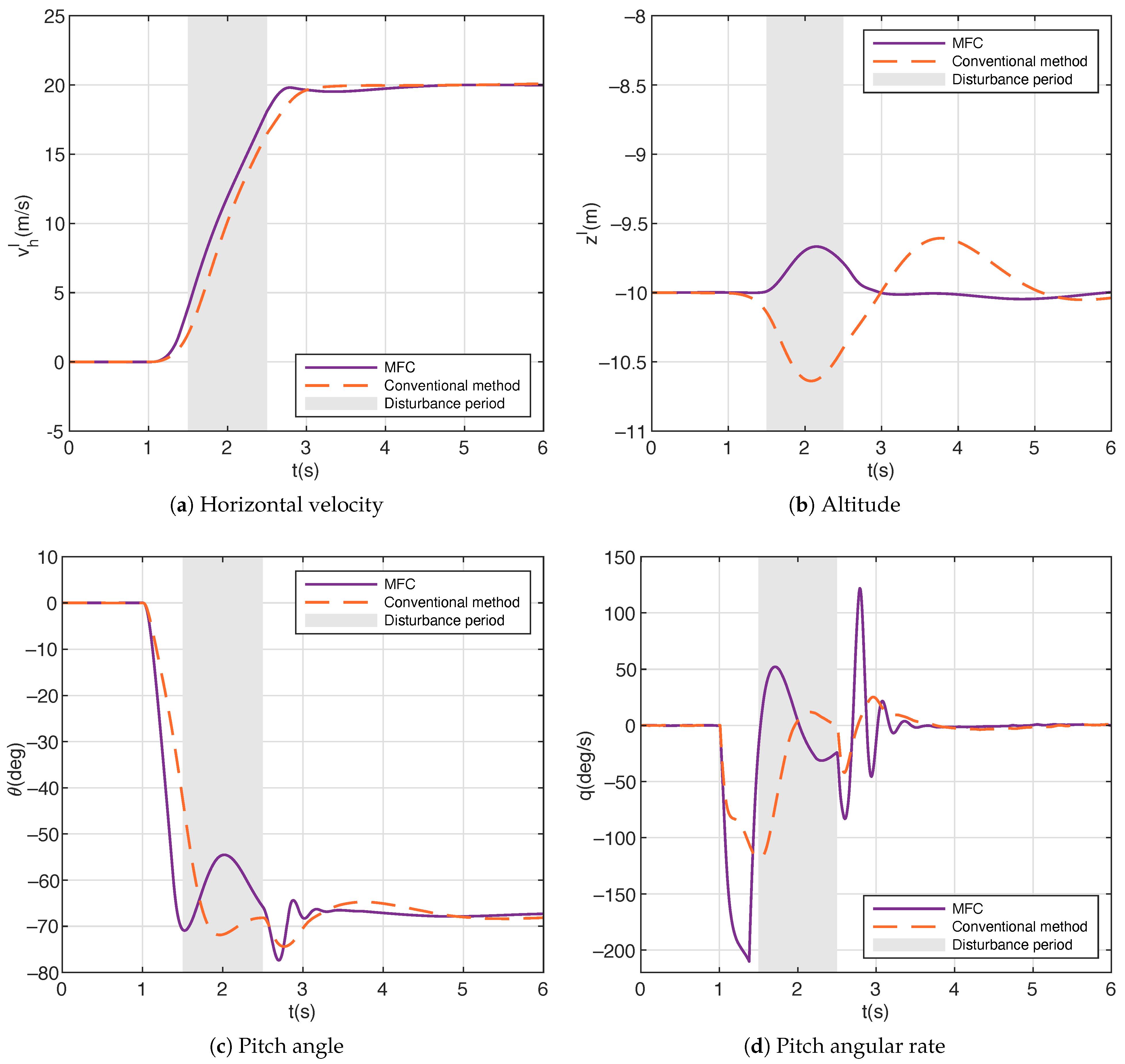
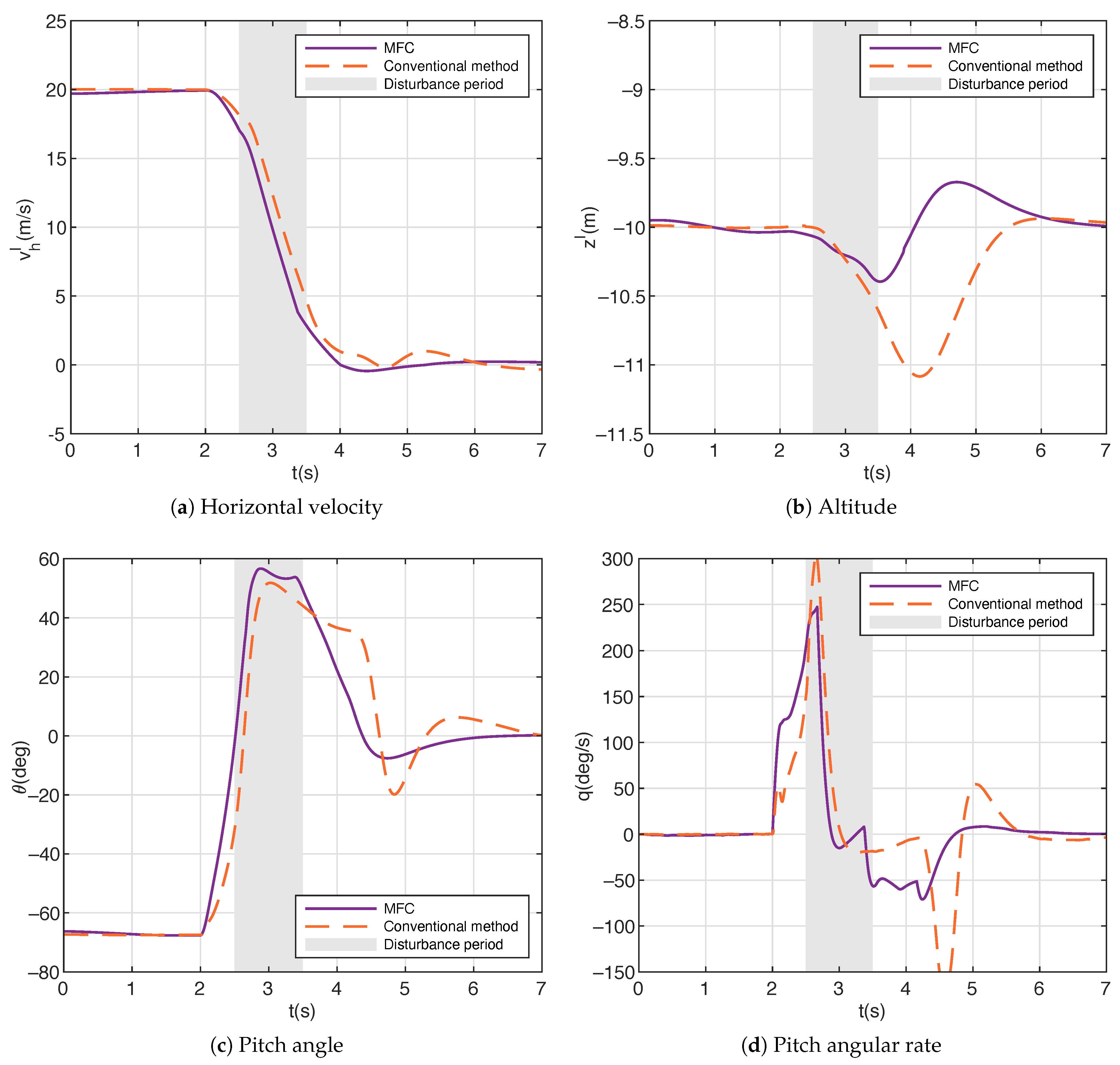
- Comparative simulations are conducted, showing that the proposed corridor-based model-free control scheme exhibits superior performance in the presence of disturbance.
2. System Modeling
2.1. 6-DOF System Dynamics
2.2. Aerodynamics
2.3. Planar Dynamics
3. The Transition Corridor of Altitude-Hold Transition
3.1. Transition Corridor Formulation
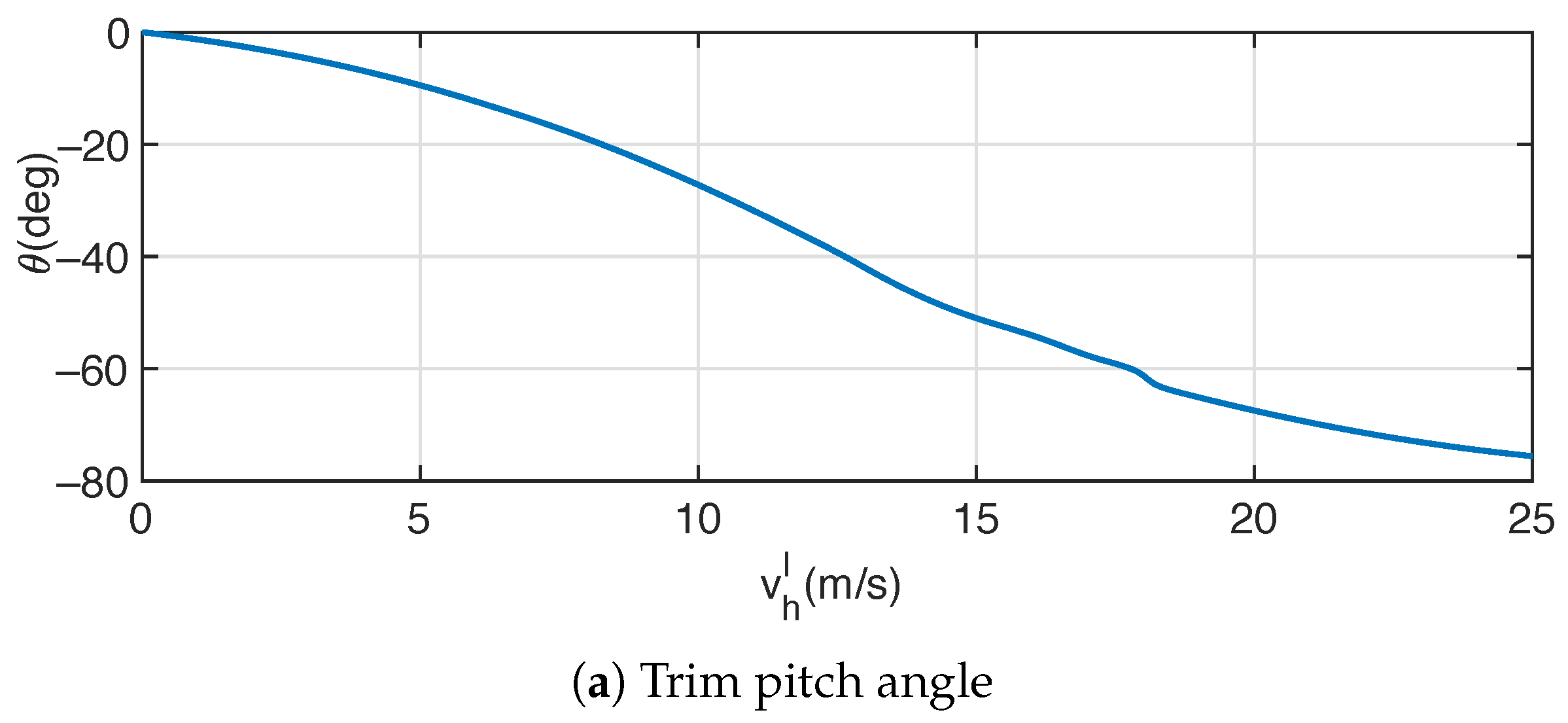
3.2. Transition Equilibrium
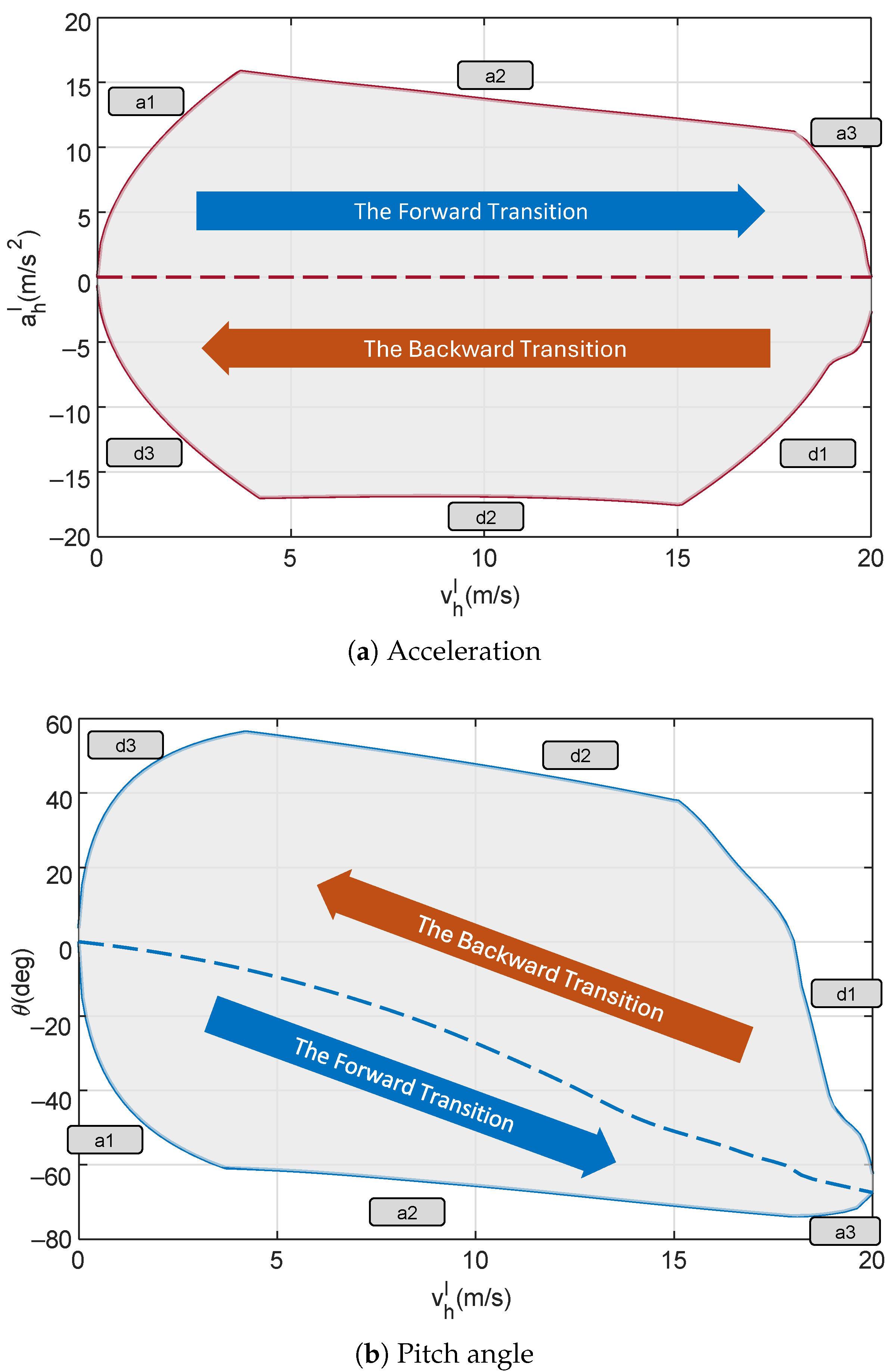
3.3. Dynamic Transition Corridor
4. Time Optimal Altitude-Hold Transition Strategy
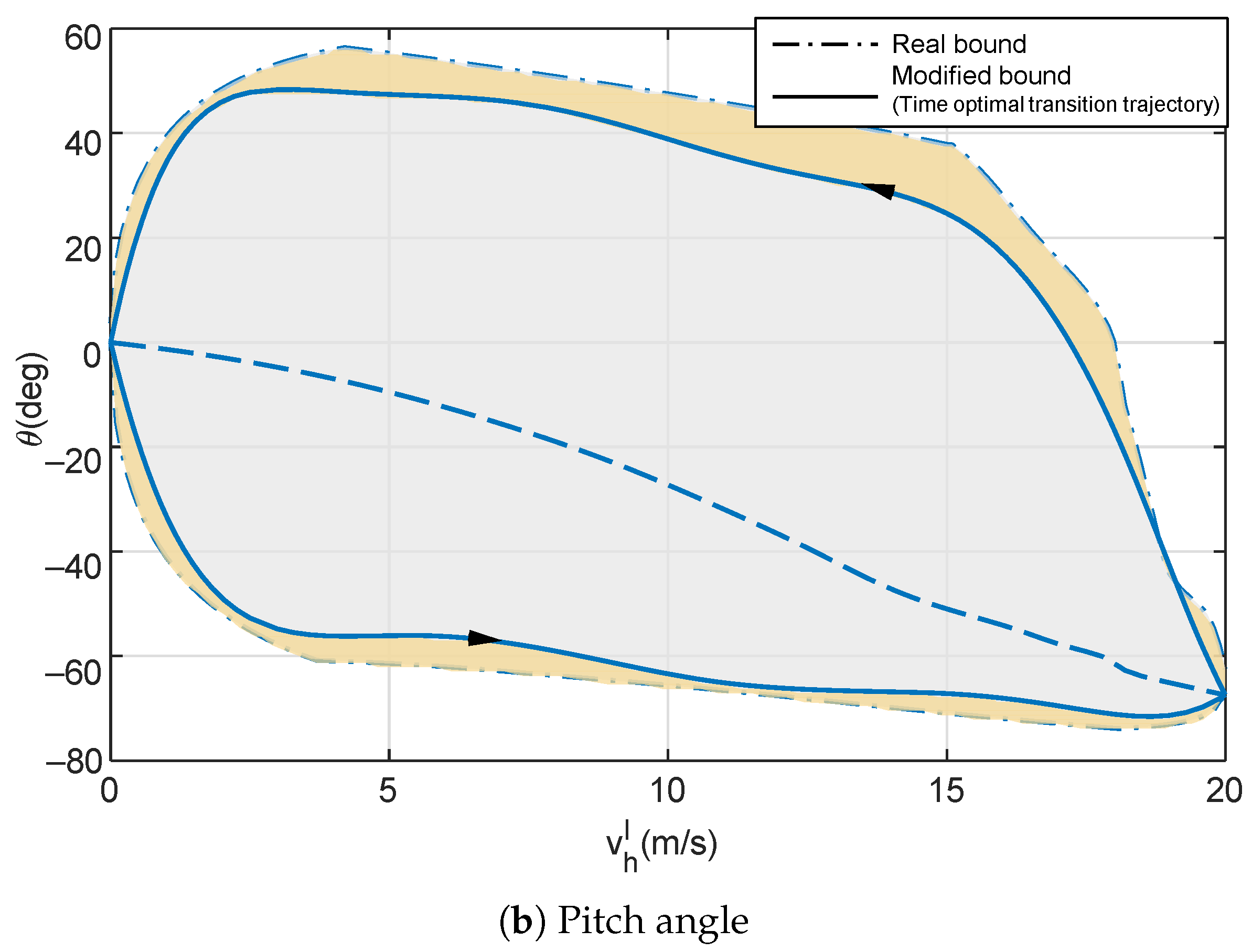
4.1. Time Optimal Trajectory Generation
4.2. Model-Free Time Optimal Altitude-Hold Transition Design
- (1)
- The forward transition
- (2)
- The backward transition
- (3)
- Thrust compensation control
4.3. Discussion
5. Simulations
5.1. Simulation 1
5.2. Simulation 2
5.3. Simulation Conclusions
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ducard, G.J.J.; Allenspach, M. Review of designs and flight control techniques of hybrid and convertible VTOL UAVs. Aerosp. Sci. Technol. 2021, 118, 25. [Google Scholar] [CrossRef]
- Stone, R.H.; Anderson, P.; Hutchison, C.; Tsai, A.; Gibbens, P.; Wong, K.C. Flight testing of the T-wing tail-sitter unmanned air vehicle. J. Aircr. 2008, 45, 673–685. [Google Scholar] [CrossRef]
- Jung, Y.; Cho, S.; Shim, D.H. A Comprehensive Flight Control Design and Experiment of a Tail-Sitter UAV. In Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Boston, MA, USA, 19–22 August 2013. [Google Scholar]
- Banazadeh, A.; Taymourtash, N. Optimal Control of an Aerial Tail Sitter in Transition Flight Phases. J. Aircr. 2016, 53, 914–921. [Google Scholar] [CrossRef]
- Oosedo, A.; Abiko, S.; Konno, A.; Uchiyama, M. Optimal transition from hovering to level-flight of a quadrotor tail-sitter UAV. Auton. Robot. 2017, 41, 1143–1159. [Google Scholar] [CrossRef]
- Yunjie, Y.; Jihong, Z.; Jiali, Y. INDI-Based Transitional Flight Control and Stability Analysis of a Tail-Sitter UAV. In Proceedings of the 2020 IEEE International Conference on Systems, Man, and Cybernetics, Toronto, ON, Canada, 11–14 October 2020; pp. 1420–1426. [Google Scholar]
- Li, B.Y.; Sun, J.X.; Zhou, W.F.; Wen, C.Y.; Low, K.H.; Chen, C.K. Transition Optimization for a VTOL Tail-Sitter UAV. IEEE-ASME Trans. Mechatronics 2020, 25, 2534–2545. [Google Scholar] [CrossRef]
- Xin, H.B.; Wang, Y.J.; Gao, X.Z.; Chen, Q.Y.; Zhu, B.J.; Wang, J.F.; Hou, Z.X. Modeling and control of a quadrotor tail-sitter unmanned aerial vehicles. Proc. Inst. Mech. Eng. Part I-J. Syst. Control Eng. 2022, 236, 443–457. [Google Scholar] [CrossRef]
- Smeur, E.J.J.; Bronz, M.; de Croon, G.C.H.E. Incremental Control and Guidance of Hybrid Aircraft Applied to a Tailsitter Unmanned Air Vehicle. J. Guid. Control Dyn. 2019, 43, 274–287. [Google Scholar] [CrossRef]
- Tal, E.; Karaman, S. Global Incremental Flight Control for Agile Maneuvering of a Tailsitter Flying Wing. J. Guid. Control Dyn. 2022, 45, 2332–2349. [Google Scholar] [CrossRef]
- Tal, E.; Karaman, S. Accurate Tracking of Aggressive Quadrotor Trajectories Using Incremental Nonlinear Dynamic Inversion and Differential Flatness. IEEE Trans. Control Syst. Technol. 2021, 29, 1203–1218. [Google Scholar] [CrossRef]
- Tal, E.; Ryou, G.; Karaman, S. Aerobatic Trajectory Generation for a VTOL Fixed-Wing Aircraft Using Differential Flatness. IEEE Trans. Robot. 2023, 39, 15. [Google Scholar] [CrossRef]
- Lu, G.Z.; Cai, Y.X.; Chen, N.; Kong, F.Z.; Ren, Y.F.; Zhang, F. Trajectory generation and tracking control for aggressive tail-sitter flights. Int. J. Robot. Res. 2023, 43, 40. [Google Scholar] [CrossRef]
- Fu, Y.B.; Zhao, W.J.; Liu, L. Safe Reinforcement Learning for Transition Control of Ducted-Fan UAVs. Drones 2023, 7, 332. [Google Scholar] [CrossRef]
- Saghafi, F.; Banazadeh, A. Investigation on the flight characteristics of a conceptual fluidic thrust-vectored aerial tail-sitter. Proc. Inst. Mech. Eng. Part G-J. Aerosp. Eng. 2007, 221, 741–755. [Google Scholar] [CrossRef]
- Zhao, W.; Underwood, C. Robust transition control of a Martian coaxial tiltrotor aerobot. Acta Astronaut. 2014, 99, 111–129. [Google Scholar] [CrossRef]
- Cakici, F.; Leblebicioglu, M.K. Design and analysis of a mode-switching micro unmanned aerial vehicle. Int. J. Micro Air Veh. 2016, 8, 221–229. [Google Scholar] [CrossRef]
- Dawkins, J.; DeVries, L. Modeling, Trim Analysis, and Trajectory Control of a Micro-Quadrotor with Wings. Drones 2018, 2, 21. [Google Scholar] [CrossRef]
- Tang, W.; Song, B.F. Transitional flight equilibrium and performance study for the X-NMRL tail-sitter VTOL MAV. Proc. Inst. Mech. Eng. Part G-J. Aerosp. Eng. 2019, 233, 3056–3077. [Google Scholar] [CrossRef]
- Zhong, J.Y.; Wang, C. Transition characteristics for a small tail-sitter unmanned aerial vehicle. Chin. J. Aeronaut. 2021, 34, 220–236. [Google Scholar] [CrossRef]
- Yang, Y.; Zhu, J.; Wang, X.; Yuan, X.; Zhang, X. Dynamic Transition Corridors and Control Strategy of a Rotor-Blown-Wing Tail-Sitter. J. Guid. Control Dyn. 2021, 44, 1836–1852. [Google Scholar] [CrossRef]
- Phillips, B.; Hrishikeshavan, V.; Chopra, I. Design, Development, and Testing of Package Delivery Quadrotor Biplane Tail-Sitter. J. Aircr. 2021, 58, 834–846. [Google Scholar] [CrossRef]
- Cheng, Z.H.; Pei, H.L. Transition Analysis and Practical Flight Control for Ducted Fan Fixed-Wing Aerial Robot: Level Path Flight Mode Transition. IEEE Robot. Autom. Lett. 2022, 7, 3106–3113. [Google Scholar] [CrossRef]
- Cheng, Z.H.; Pei, H.L. A corridor-based flight mode transition strategy for agile ducted-fan tail-sitter UAV: Altitude-hold transition. Chin. J. Aeronaut. 2023, 36, 330–345. [Google Scholar] [CrossRef]
- Zhang, T.; Barakos, G.N. Review on ducted fans for compound rotorcraft. Aeronaut. J. 2020, 124, 1–34. [Google Scholar] [CrossRef]
- Romero, A.; Sun, S.H.; Foehn, P.; Scaramuzza, D. Model Predictive Contouring Control for Time-Optimal Quadrotor Flight. IEEE Trans. Robot. 2022, 38, 3340–3356. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, Z.; Pei, H. Time Optimal Altitude-Hold Flight Mode Transition Strategy for a Class of Ducted Fan Tail Sitter UAV. Aerospace 2024, 11, 654. https://doi.org/10.3390/aerospace11080654
Cheng Z, Pei H. Time Optimal Altitude-Hold Flight Mode Transition Strategy for a Class of Ducted Fan Tail Sitter UAV. Aerospace. 2024; 11(8):654. https://doi.org/10.3390/aerospace11080654
Chicago/Turabian StyleCheng, Zihuan, and Hailong Pei. 2024. "Time Optimal Altitude-Hold Flight Mode Transition Strategy for a Class of Ducted Fan Tail Sitter UAV" Aerospace 11, no. 8: 654. https://doi.org/10.3390/aerospace11080654
APA StyleCheng, Z., & Pei, H. (2024). Time Optimal Altitude-Hold Flight Mode Transition Strategy for a Class of Ducted Fan Tail Sitter UAV. Aerospace, 11(8), 654. https://doi.org/10.3390/aerospace11080654