Abstract
The consequences of new airspace entrants, such as novel aircraft concepts with innovative propulsion systems, on air traffic management operations need to be carefully identified. This paper aims to assess the impact of future aircraft with different performance envelopes on the European air traffic network from a flow-based perspective. The underlying approach assumes that all certification-related questions concerning airworthiness have been resolved and do not take into account any economic factors related to airline operations. For example, for an innovative propulsion system, a short range all-electric aircraft is considered in this study. Aircraft trajectory calculations are based on the dataset of base of aircraft data (BADA), which are developed and maintained by EUROCONTROL. The new design concept is integrated into BADA as well, resulting in a new set of coefficients for the all-electric aircraft. In addition to the adjusted parameters which affect airborne performances, ground-related aspects are also taken into account. This includes assumptions on operational procedures, charging capacities and adaptions in infrastructure. Investigations are carried out at the trajectory level as well as at the airport and the entire network.
1. Introduction
To achieve the highly ambitious goals in reducing emissions and noise formulated by the European Commission in the “Flightpath 2050”, the interdisciplinary research cluster of excellence Sustainable and Energy Efficient Aviation (SE²A) seeks to develop and investigate new technologies for a sustainable and eco-friendly air transport system (ATS). The expectation of new energy sources and aircraft technologies possesses different environmental demands on air traffic management (ATM) and airport layout. Utilising novel electric or hydrogen-based aircraft types will lead to major changes in transportation flows and operating processes within the ATS.
In line with these new propulsion technologies, changes in the flight performance of the aircraft are to be expected. With respect to current aircraft types, climb rates, speeds and ranges of new aircraft will change. Furthermore, low-noise aircraft can lead to different flight corridors or adapted night flight regulations. This paper performs what-if studies to analyse the impact of an all-electric aircraft on ATM operations and ground handling at airports, using the example of an aircraft developed in the context of SE²A.
Figure 1 shows the rendered view of the SE²A short range aircraft version 2 (SRV2) in a low-wing configuration. The cabin layout is similar to that of the reference aircraft ATR-72 (AT72) with a comparable luggage compartment area. It features two aft-mounted electric motor-driven propellers and a battery placed at the aircraft belly with a pack energy density of 700 Wh/kg, assumed to be reached by the year 2050 [1,2].

Figure 1.
SE²A short-range all-electric aircraft version 2 SRV2 [1].
The specifications of this aircraft were derived under consideration of the European Union Aviation Safety Agency (EASA) Certification requirements, “Certification Specifications and Acceptable Means of Compliance for Large Aeroplanes CS-25” and met the top level requirements of the reference aircraft AT72. Though proving its airworthiness, it has to be stressed that direct operating costs, which encompass energy, maintenance, capital, crew costs, and fees, and are based on an electricity price of 0.118 EUR/kWh, increase up to 42%, depending on the assumed energy density. From an economic point of view, this prevents the introduction of this type of aircraft. In this paper, however, the implications are investigated with respect to the throughput and punctuality at different levels of the ATM system, such as single trajectory or network level.
Table 1 gives a summary of the SRV2 and AT72 aircraft technical data and specifications.

Table 1.
Aircraft characteristics of SRV2 and AT72.
To this day, the implications of all-electric aircraft on ground infrastructure and electricity demand were explored in a variety of studies. With regard to environmental impacts, a general assessment of the world-wide electricity demand for airlines, comprising all-electric aircraft with a range of up to 600 nautical miles was made in [3]. More specifically, ref. [4] examined the impacts of electrification on electricity demands at O’Hare International Airport (KORD). This study considers a scenario where domestic US carriers partially adopt hybrid electric aircraft (HEA). By analysing various battery technology evolution scenarios, the resulting increase in electricity demand (both daily average and peak), necessary to operate flights at KORD, was calculated.
Using the example of Athens Airport, ref. [5] applied an optimisation algorithm, presented by [6], to assess the airport infrastructure in support of a hybrid-electric fleet. Various parameters such as battery, charger, aircraft properties, and flight schedule were adopted to ascertain the infrastructural needs, such as the number of recharging stations or peak electric power, while minimising infrastructural and operational costs by using an optimal battery recharging time schedule. The first assumptions of the fast charging performances of 400 kW and 800 kW were made. Substituted aircraft types comprise DH8D, AT72, and AT45. Ref. [7] investigated the necessary adaptions concerning infrastructure and operational procedures for a hybrid-electric and an all-electric aircraft. This is relevant with regard to the adjustments of the turnaround process for the two battery strategies of charging and swapping. To model the airport utilisation in terms of gates, ref. [8] modelled the influence of different numbers of charging stations. This discrete-event approach of an airport stand simulation model focuses on Heathrow Airport (EGLL) and was created, using the commercial tool AnyLogic, by implementing distributions for arrival, taxiing, and service times. Since most studies focus on the optimisation of the utilisation of charging equipment or assess the impact of restricted charging resources on a particular airport, to the best of the authors’ knowledge, network-wide effects, when introducing all-electric aircraft, were not investigated in detail.
In order to investigate network-related effects, the advanced hybrid air traffic simulation platform AdAS developed at the Institute of Flight Guidance of Technische Universität Braunschweig was used [9]. With respect to current flow-based models, AdAS intends to gain better insights into the underlying interdependencies by modelling higher levels of detail for selected parts, whilst covering and maintaining the complexity of the whole European air traffic network. It provides the modular components of different levels of detail, for en-route, terminal airspace, and ground operations, in order to investigate the influences of new airspace entrants and to enable simulation-based optimisation approaches. This coupled fast-time gate-to-gate simulation environment is divided into an air- and landside simulation part, as can be seen in Figure 2.
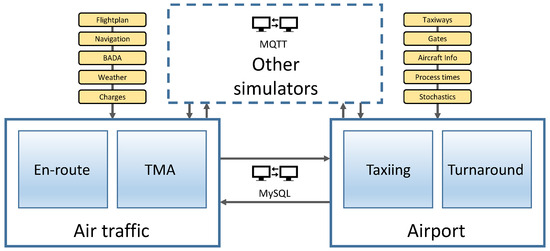
Figure 2.
Diagram of the coupled hybrid gate-to-gate simulation environment AdAS.
The airside component covers en-route traffic and the terminal manoeuvring area (TMA), while ground-related aspects such as turnaround processes and taxiing are modelled in the airport component. Both components synchronise via a database protocol and have various input data. These encompass elements such as flight plans, waypoints, arrival and departure routes, and the simplified BADA flight model. Additional aspects such as weather disturbances or cost-related factors can also be considered, but are not included in this study. On the other hand, ground-related processes are reflected by infrastructure elements such as taxiways or gates, and operational aspects like the duration of sub-processes during turnaround and their corresponding distributions. These aspects are also disregarded in this study. The Table A2 and Table A3 offer more insights into the input data.
The object-oriented air-side simulation makes use of BADA performance envelopes for conventional aircraft. The BADA dataset provides standardised operational characteristics for a large number of commercially operated aircraft, which can be used to calculate fuel consumption, flight performance or trajectories in a simplified manner. It is developed by EUROCONTROL and is widely used by air navigation service providers and research institutions. In 2024 alone, there were 84 BADA-related publications. The dataset is derived from a point mass model of an aircraft and provides aircraft-specific coefficients in a defined format.
Within the airside simulation, the BADA dataset is used for trajectory calculation and prediction algorithms. It provides a collection of performance and operating procedure coefficients for a wide range of conventional aircraft types. These coefficients are used to calculate thrust, drag, and fuel flow as well as to specify nominal cruise, climb, and descent speeds [10,11]. Those BADA coefficients were also generated for the design concept SRV2.
The comprehensive dataset and MATLAB script used in this work is available from the repository BitBucket under https://bitbucket.org/bekir114/all-electric-aircraft/downloads/ (accessed on 10 July 2024). The MATLAB implementation is free, open source, and allows the reproduction of the adapted BADA coefficients for the SRV2 aircraft.
The simulation environment incorporates heuristics to regulate the traffic within both the TMA and sector, alongside handling tasks such as runway assignments and conflict detection and resolution. At selected airports, the traffic flow within the terminal airspace is managed through arrival procedures, such as tromboning or the point merge system, taking wake turbulence separation minima into account.
The discrete event-based airport part, on the other hand, comprises turnaround processes and selected taxiing procedures. Here, stochasticity can be considered for processes. The turnaround process is implemented as a standard model with process durations derived from aircraft manufacturer. This encompasses respective sub-processes such as boarding or re-fuelling and is applied for all European airports within the model.
Each simulation part performs its particular calculations for a given time step. Synchronisation is achieved through data exchange using a MySQL table, that is, an open source relational database management system organising data into tables. In addition to the coupling of air- and landside, an extension to incorporate further simulators at a later stage is provided by means of the MQTT protocol, as depicted by the dashed line in Figure 2. For more details on the implementations and validations of the approaches and heuristics applied in the AdAS simulation environment, the authors kindly refer to the concept paper [9].
The remainder of this paper is structured as follows:
In Section 2, the adapted BADA coefficients and parameters are explained. This applies, for example, to the calculation of thrust, drag or the flight envelop. This chapter uses data generated in aircraft design, as can also be seen in [2], which were provided within SE²A cluster and derives the particular constants by means of regression. The respective equations of the BADA dataset are provided and the results of the fitting are presented.
Section 3 offers an example of a potential future air traffic scenario upon the introduction of the SRV2 into the ATS. Due to already significant observed effects, its operational hours are limited to 24. Given the limited availability of the aircraft type SRV2, a selection of comparable aircraft were replaced as well.
Section 4 illustrates the corresponding implications of this scenario. It focuses on the impact of individual flight trajectories and within the TMA, using selected key performance indicators. The study investigates the effect on throughput at Athens Airports for varying numbers of available charging stations. Additionally, it briefly discusses the electricity demand relative to available renewable energy. Finally, it visualises the effects of decreased throughput and increased delays at a network level, calculating differences in arrivals and departures for numerous affected airports. The Chapter finishes with a discussion of the results and their relation to other players in the air traffic system.
The last Section 5 concludes with a summary and an outlook for future research.
2. Adapted BADA Coefficients
This section outlines the various equations and derived coefficients for the SRV2 design concept, as used in the BADA operations performance and airline procedure model. The goal of this section is to transform the particular performance data of different flight phases from a given mission profile, which are the results of the aircraft design (see also Section 2.2) and to transform them into the coefficients of the BADA standard file format. Since the coefficients are produced in the standard format, the SRV2 represents a new aircraft type within the family of commercial aircraft in BADA 3. Figure A1 illustrates the specific BADA standard for operation performance, based on the example of the SRV2. Due to license restrictions, the data of the reference aircraft AT72 cannot be shown.
In the following, the accuracy of the BADA model and applications of BADA to electric aircraft will be briefly discussed. In general, point mass models are widely used and established for simulating flight trajectories within the domain of ATM. For example, the FACET tool developed by NASA [12], SAAM from EUROCONTROL [13] or the open source platform Bluesky from TU Delft [14] employ point mass models to simulate the behaviours of aircraft in the ATM system.
Ref. [15] describes the evaluation of the BADA dataset by the developer EUROCONTROL. It should be emphasised that the BADA internal generic Airline Procedure Model (ARPM) can be used to map different flight phases such as climb, cruise or descent. The consideration of each specific aircraft operation is necessary in order to be able to carry out an ATM-based analysis. The accuracy of the BADA application was analysed in a study [16] using recorded flight data from the quick access recorder. Eighteen flights in Japan were examined with regard to the total fuel consumption. Deviations of ±5% between the real flight data and the BADA calculation were observed. Another study [17] discusses the aircraft performance model (APM) developed on the basis of the BADA H family for electric vertical take-off and landing (eVTOL) aircraft, which realistically depict the manufacturers’ performance values and enables the calculation of flight trajectories. This APM was developed in cooperation between EUROCONTROL and Airbus and uses the technical demonstrator Vahana. Vahana is a single-passenger or cargo, all-electric, fully autonomous eVTOL demonstrator developed by the Airbus Innovation Centre. Here too, the total energy point mass model from BADA is used to visualise the motion. As in the approach discussed in this paper, the fuel flow and the change in mass are zero.
2.1. Verification
This subsection presents the verification of the implementation of the BADA model used in this study. Figure 3 shows an example of the implementation of the BADA model.
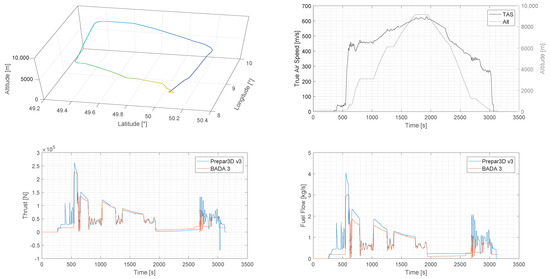
Figure 3.
Verification of the BADA implementation [18].
The upper left part depicts a reference flight profile (from yellow to blue) of an Airbus A320 which was generated by a human in the loop (HITL) simulation. This flight or mission profile of a short-range flight was conducted by means of the cockpit simulator of the Institute of Flight Guidance of TU Braunschweig (see Figure 4 upper right part). This simulator incorporates the Prepar3D V3 Engine. The reference scenario represents all relevant flight phases. The upper right part of Figure 3 shows the according course of true airspeed, TAS, and altitude.
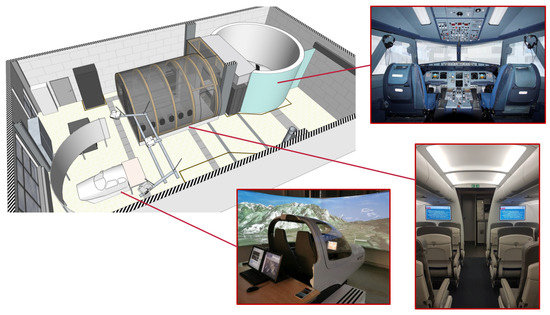
Figure 4.
Flight simulators of the Institute of Flight Guidance of TU Braunschweig [18].
In the lower left part of Figure 3, the input of thrust from the human operator is represented as the blue line.
The lower left and lower right part of Figure 3 show good matching between HITL-generated values and the BADA implementation. In the presented example of an Airbus A320, the difference between the HITL and BADA data during the cruise phase follows to 4.347%. More details can be found in [18].
2.2. SRV2 Energy Network
The mission profile mentioned at the beginning of the Section 2 has been generated by Stanislav et al. [1,2] within the framework of the cluster of excellence SE²A using the conceptual level aircraft design environment SUAVE [19]. In the SUAVE analysis framework, a propeller electric energy network with high-temperature superconducting motors was implemented. Figure 5 depicts the all-electric energy network layout.
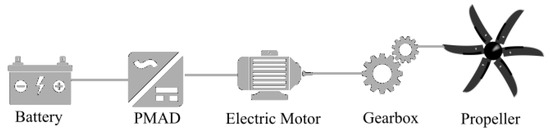
Figure 5.
Battery-electric energy network layout. Taken from [2].
Propeller modelling was carried out by Stanislav et al. [2] using the cubic spline method described in [20]. Based on design operating conditions, the propeller thrust can be described with a cubic spline and is defined as follows:
where A, B, C, and D are the coefficients required to precisely fit the curve and V the velocity. To obtain these coefficients, a system of four equations at different conditions was set up and solved, resulting in a general thrust expression, which then was used to find the propulsive efficiency of the propeller . With the given efficiencies of the components of the energy network shown in Figure 5, the total power at the battery was obtained to be used during the SUAVE mission analysis [2].
The approach used in this paper to determine the thrust coefficients in Equations (3)–(8) considers the last link in the energy network chain in Figure 5. Here, the propeller thrust from the SUAVE mission profile is used to determine the coefficients of the BADA model for thrust by means of regression (see Section 2.4). Based on the momentum principle, the air masses accelerated by the propeller produces the thrust and is equal to the mass flow rate times the difference in velocity (). This principle also applies to electric propulsion. Therefore, regardless of the energy supply, an electric propulsion can be classified in the same category as a turboprop engine in a point mass model approach.
2.3. Total Energy Model
When adapting the coefficients, the underlying equations of BADA [10,11] remain untouched. The equations are derived from a point mass model. This includes the total energy model (TEM) equation of the aircraft model defined in terms of engine thrust, aerodynamic drag and flight envelope and airline procedure default speeds. The TEM is a mathematical representation that describes the energy state of an aircraft at any given time during flight and is defined as follows:
with as the thrust acting parallel to the aircraft velocity vector, the aerodynamic drag D, aircraft mass m, geodetic altitude h, gravitational acceleration , the true airspeed and the time derivative .
Here, atmosphere conditions that occur in the International Standard Atmosphere (ISA) are assumed.
Furthermore, only the throttle and the elevator are used for affecting the aircraft trajectory in the vertical plane, whereas the use of devices like spoilers, leading-edge slats, or trailing-edge flaps are neglected. These two independent control inputs allow any two of the three variables of thrust, speed, or rate of climb or descent (ROCD) to be controlled. Equation (1) then needs to be rearranged in order to facilitate the calculation of the desired value.
2.4. Engine Thrust
In the BADA model, the total engine thrust is calculated for three different thrust levels. This includes the maximum climb and take-off, the maximum cruise, and the descent thrust. The maximum climb thrust at ISA conditions is calculated as a function of engine type, geopotential pressure altitude and true airspeed . This equation for an aircraft type with turboprop engines now applies to the introduced all-electric aircraft SRV2 and is given below.
The corresponding three coefficients were determined by means of a nonlinear least squares analysis, that has the best fit to the propeller thrust derived from the given SUAVE mission profile. A fit type for the model specified by Equation (3) was constructed in MATLAB, designating airspeed and altitude as the independent variable and maximum climb thrust as the dependent variable. Figure 6 illustrates the relationship between true airspeed, altitude, and maximum climb thrust and the applied surface fitting with a coefficient of determination R² of 0.96989.
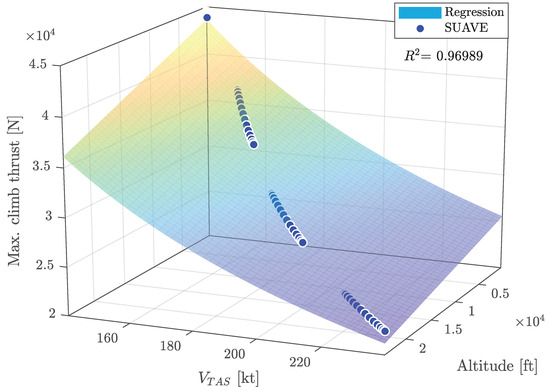
Figure 6.
Maximum climb thrust over altitude and true airspeed.
In the BADA model, this maximum climb thrust is used for both take-off and climb phases. If necessary, the maximum climb thrust can be corrected for temperature deviations from the norm atmosphere.
In stationary cruise flight, the normal thrust is set equal to drag, whereas the maximum cruise thrust can be calculated as a ratio of the maximum climb thrust given by Equation (3):
The maximum cruise thrust coefficient of 0.95 is uniformly set for all aircraft.
Similarly, the descent thrust is calculated as a ratio of the maximum climb thrust with different correction factors used for altitudes above and below the transition altitude and different configurations.
if :
if :
Figure 7 shows the correlation between altitude and thrust for the phases climb and descent. It illustrates how well the descent thrust derived from the mission profile fits the calculated descent thrust given by expressions (5)–(8) with the determined correction factors for the SRV2 aircraft.
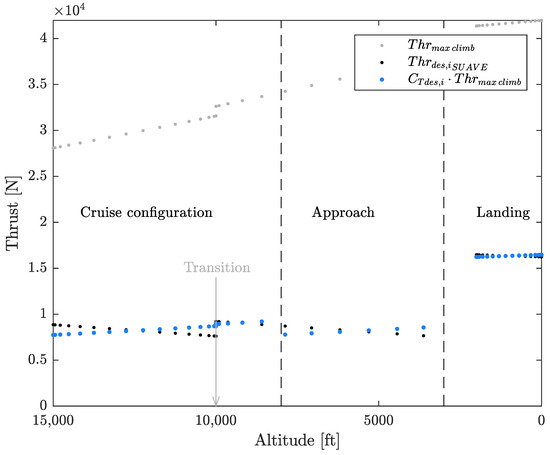
Figure 7.
Matching of descent thrust from SUAVE and calculated descent thrust for SRV2.
2.5. Aerodynamic Drag
Assuming that the flight path angle is zero, the lift coefficient can be specified as a function of aircraft mass m, gravitational acceleration , air density , true airspeed , wing reference area S, and bank angle .
The drag coefficient is calculated using the lift coefficient and the parasitic and induced drag coefficients , for the different phases of flight i take-off (TO), initial climb (IC), cruise (CR), approach (AP), and landing (LD) with different flap settings.
In the landing configuration, the drag increase due to the landing gear is also considered via an additional parasite drag coefficient . Finally, the aerodynamic drag force is calculated in the following standard manner:
Figure 8 shows the relationship between the lift and drag coefficient for the different flight conditions. The depicted drag polar were obtained from aircraft design data in CPACS format. In order to determine the parasitic and induced drag coefficients for the all-electric aircraft SRV2, the previously described fitting method was applied.
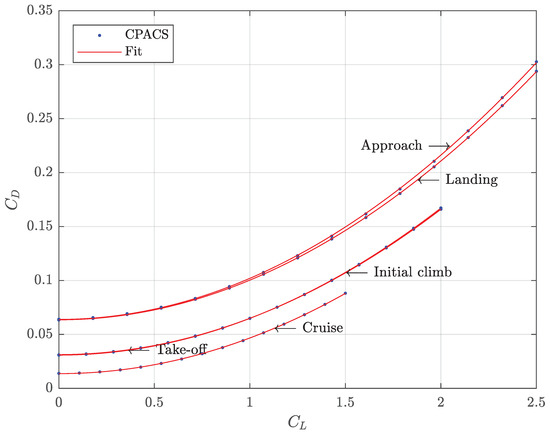
Figure 8.
Relationship between drag and lift coefficient.
2.6. Flight Envelope
The maximum speed and altitude for an aircraft are expressed in terms of maximum operating speed , maximum operational Mach number , maximum operating altitude above standard mean sea level (MSL), and maximum altitude above standard MSL at maximum take-off weight (MTOW) under ISA conditions (allowing about 300 ft/min of residual rate of climb). This given speed and altitude limits are taken directly from available aircraft design data for the SRV2.
The minimum speed for the aircraft is a function of aircraft stall speed and a minimum speed coefficient:
The minimum speed coefficient is set to 1.2 for take-off and 1.3 for all other phases. The speeds are specified in terms of calibrated airspeed (CAS). The stall speed depends upon the abovementioned five different flight conditions specified with configuration threshold altitudes. Based on the following assumption made in the BADA model, the stall speeds of the SRV2 were calculated using Equation (8) and the maximum lift coefficient derived from aircraft design data (see MATLAB script):
2.7. Airline Procedure Default Speeds
In order to determine aircraft speed schedule for the three flight phases of j climb (cl), cruise (cr), and descent (des) for each aircraft model, the BADA airline procedure model requires the following information:
- Standard CAS below 10,000 ft ();
- Standard CAS between 10,000 ft and Mach transition altitude ();
- Standard Mach number above Mach transition altitude.
For the SRV2, this information is taken from the output file generated with SUAVE, providing a breakdown of the mission profile. In addition, altitude levels expressed in terms of geopotential pressure altitude used for the determination of CAS speed schedules are provided in the BADA model. For further details, the authors of the paper kindly refer to the user manual of BADA [10,11].
A huge benefit of creating performance parameters compatible with the BADA model is that corresponding aircraft flight trajectories can be calculated without the need for further surrogate model implementations. In this way, the existing list of aircraft with the associated dataset can be easily expanded. In the following, equations for fuel consumption are explained for the sake of completeness.
In the BADA model, nominal fuel flow for turboprop engines in all flight phases except during idle descent and cruise is specified as a function of the true airspeed , the thrust specific fuel consumption coefficients , , and the engine thrust : .
The minimum fuel flow corresponding to idle thrust during descent is specified as a function of the geopotential pressure altitude and the descent fuel flow coefficients , : .
In general, as the aircraft transitions from idle thrust during descent to the approach and landing configuration, the thrust is increased again and the fuel flow calculation is based on the nominal fuel flow and limited to the minimum fuel flow if necessary: .
The cruise fuel flow is calculated using the nominal fuel flow and a cruise fuel flow factor : .
The fuel flow coefficients for the SRV2 aircraft with zero fuel burn are set to 0 and 1, respectively (see fuel consumption block in Operations Performance File (OPF) in Figure A1). The generated OPF file can now be imported into BADA standalone tools without errors, despite restricted access to its source code, allowing the user to calculate the corresponding flight trajectories. Since the energy consumption is not part of the standard BADA data format, the equations for the regression can be arranged freely in any desired manner. For reasons of consistency, the energy consumption equations can be formulated in a same fashion as the fuel consumption equations given above, with the thrust specific energy consumption coefficients , , the descent energy flow coefficients , , and the cruise energy flow factor .
The comprehensive dataset and MATLAB script used in this work is available from the repository BitBucket under https://bitbucket.org/bekir114/all-electric-aircraft/downloads/ (accessed on 10 July 2024). A summary of the BADA operations performance parameters can be found in Table A1.
3. Simulation Scenario
After adapting the BADA coefficients to the characteristics of the all-electric aircraft, the effects of the air traffic will be explored. This study will focus on three levels, such as the single trajectory, airport, and network level, and will consider one day of operation. This chapter will describe the data foundation of an adapted European flight plan as well as the assumptions made, concerning the charging process on the ground.
In order to investigate the implications of the flight envelope of the all-electric aircraft SRV2, the current flightplan has to be adapted. Since, at the present time, no electric aircraft is introduced into the European air traffic, a similar aircraft type in terms of characteristics has to be chosen, which will then be replaced by the SRV2. Given the properties of the SRV2, such as range and passenger capacity, the AT72 serves as reference aircraft, as mentioned in Section 1. Figure 9a illustrates the numbers of arrivals and departures of the AT72 in descending order for European airports. With respect to the total number of flights of the selected scenario from 1 September 2018, which contains 30,792 flights, the share of AT72 of 0.39% is very small in order to produce network-wide effects. Therefore, further aircraft types were selected, which resemble the AT72 configuration in terms of passenger capacity, which is illustrated in Figure 9b.
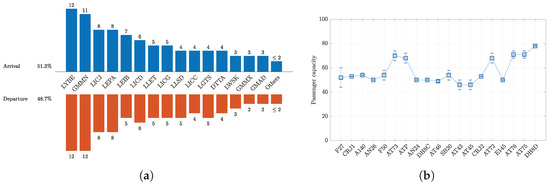
Figure 9.
(a) Sorted number of arrivals and departures of AT72 at different airports. (b) List of selected aircraft with similar passenger capacity as AT72.
Differences between the selected aircraft concerning ground processes are neglected in this scenario. The expanded set of substituted aircraft types, now covering 7.16 % of traffic, leads to a new distribution of the electric aircraft within European airports, which is depicted in Figure 10.
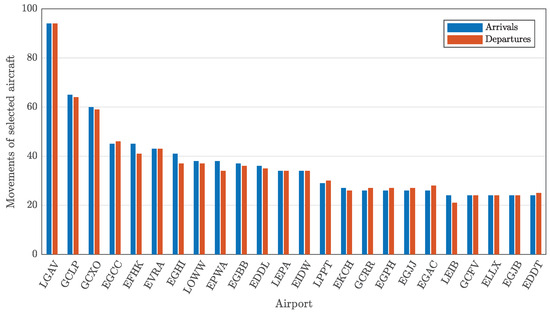
Figure 10.
Sorted number of arrivals and departures of substituted aircraft at different airports.
With respect to the airport level, Figure A2 illustrates the distribution of aircraft types for Athens Airport (LGAV). Since LGAV represents the airport with the highest number of substituted electric aircraft of 24.77 %, the most relevant aircraft are still of conventional type. Destinations of LGAV are illustrated in Figure 11a, considering only airports with more than nine flights. Airports affected by all-electric aircraft arriving from LGAV are mainly in short range distance, as depicted in more detail in Figure A3.
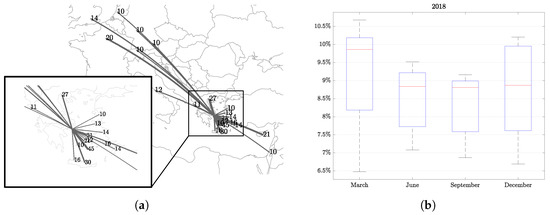
Figure 11.
(a) Subset of destinations served by LGAV. (b) Boxplot of the share of SRV2 for different seasons.
A single day of operations was selected for presentation in this study, as significant implications on throughput and punctuality have already been observed at various airports. These disturbances impact flight schedules and lead to a corresponding decrease in passenger transport performance, necessitating the creation of a new flight plan. The revised schedule would need to incorporate additional aircraft to ensure transport capacity; however, this is beyond the scope of this paper. Other factors, such as varying weather conditions, long-term trends, or seasonal differences, are disregarded, as this study aims to exemplify the delay propagation and reduction in transport capacity when introducing this type of aircraft into the European air traffic system over the course of one day.
Since only one day of operations is considered in the scenario, it has to be stressed that, due to the variations within the flight plan over longer periods of time, significant differences in outcome are possible. For example, with regard to the individual days, variances between seasons are depicted in Figure 11b.
Figure A4 visualises the traffic of the base scenario and the substituted aircraft, which are replaced by the SRV2. The latter are marked in green. A section of Figure A4, displaying the UK, aims to exemplarily picture the complexity of TMA areas.
Besides the flight envelope, the new all-electric aircraft affect ground procedures as well. This is especially relevant for the charging or swapping of batteries which affect the turnaround time. In current operations, the sequence of processes and the related infrastructural dependencies have to be considered. This especially applies to ground service equipment (GSE), which probably has to be modified concerning its position, for example, when swapping battery packs.
As an example of the current operations, Figure A5 depicts different turnaround configurations for a typical aircraft type, as can also be seen in [21]. Here, different configurations, such as the position on the gate or at a stand, are reflected in connection with the respective ground support equipment. Since some configurations bear great similarities, for example, in Figure A5a,b, other configurations, such as the gate position in Figure A5c, have influences on the position of ground equipment. The first two differ with respect to the loading process (unit load device, ULD, vs. bulk loading) and affect the available space around the aircraft, which again might relate to the position of charging equipment. The configuration in Figure A5c frees up space around the aircraft on the left hand side, though might it invoke safety issues when charging or swapping batteries close to the terminal. For a better understanding of the depiction in Figure A5, the abbreviations do apply. Besides the aspect of the position of ground equipment, the sequence of sub-processes is crucial when adapting the turnaround process. Figure A6 illustrates the sequence of sub-processes in the form of a Gantt chart, highlighting the critical path in orange. Pink areas represent durations of removal and positioning of equipment. The chart also indicates serial and parallel activities. For example, cleaning will start after deboarding, whereas unloading can be performed simultaneously.
Since the swapping process of batteries is not deemed as a hazardous risk, it can be executed in parallel to other turnaround sub-processes. To the best of the authors’ knowledge, the concept of performing a battery exchange simultaneously with passenger boarding remains an assumption. Regulatory security procedures are expected to be introduced in the future. With respect to the plug in the charging process, it might be necessary to sequentially perform this task, excluding passenger deboarding or boarding, such as in conventional aircraft, where re-fuelling is tied to the end of deboarding.
The duration of the swapping process of batteries is related to [7]. Here, battery compartments were treated as a unit load device (ULD), which takes up to 1000 kg of battery load. Given a battery weight of 13,861 kg [1], 14 ULD would be necessary to be exchanged. With a typical flow rate of 0.54 per minute per ULD [7], this would result in 15 min 7 s for transport, assuming one transport vehicle. Any potential effects on the aircraft’s centre of gravity due to container loading, in relation to a lower passenger load factor, will be disregarded. Given an additional time for loosening and fastening ULD battery modules, the adapted duration for swapping is set to 20 min. Since it is shorter than the overall turnaround process, when applied in parallel, it will be neglected in this study.
Concerning the battery charging and given an assumed battery density of 0.700 kWh/kg [1,2] as well as current charging performances of 400 kW [5], the charging of 80% capacity would result in 19 h 24 min. This duration massively exceeds the current operational boundaries concerning ground times. Therefore, a battery compartment of 2 tons is assumed, leading to seven parallel charging facilities of 400 kW each. The overall charging time yields to 166 min. This still represents a substantial extension of the turnaround time, though the authors of the study deemed it reasonable to limit the charging performance of one charging point to 2800 kW. Furthermore, due to the long duration, the study assumes a parallel charging procedure during turnaround sub-processes, bearing in mind the possible violations of safety procedures yet to be defined.
It is important to emphasise that the assumptions made in this study are based on projections regarding future technological advancements, see also [1,2]. The current limitations of widely used lithium-ion batteries, such as an energy density of 300 Wh/kg, have been disregarded. The same applies to charging capabilities, which can reach up to 350–400 kW nowadays. Since it is crucial to maintain a balance between charging performance and battery lifespan, it is not obvious whether a charging performance of 400 kW can be applied consistently.
Since charging points will occupy gate facilities during the charging process, Table 2 gives a list of gates and stands of relevant airports. Those relevant airports which heavily influence the European air traffic are also modelled concerning aircraft sequencing in the TMA.
Table 2.
Airport runway configurations [22], arrival procedures [23,24], and the number of aircraft parking positions including gates [25].
4. Results
In this chapter, the perturbations on three levels of the air traffic system will be presented with respect to the introduction of the all-electric aircraft type SRV2. Firstly, the implications on a single trajectory will be discussed. Secondly, the influence on a selected airport with a high percentage of all-electric aircraft is analysed, and lastly, on a greater scope, the network-wide effects are examined. For each of the three investigated parts, the different scenarios of all-electric aircraft are assumed in terms of charging facilities at the selected airport. The particular scenario is presented in each section. An unlimited number of charging stations is assumed, as the focus lies on airborne-related effects. Therefore, the number of ground-based charging stations is considered irrelevant. Additionally, having an unlimited number of charging stations allows for the calculation of the total electricity needed throughout the day and to determine peak requirements. In contrast to that, when investigating airport-related effects, different numbers of available charging stations are simulated. Concerning the charging performance, the figures presented in Section 3 are assumed. The reference scenario, which excludes the all-electric aircraft is hereinafter referred to as base scenario. At the end of this chapter, a brief discussion of the results with regard to other aspects of the ATM system will be made.
4.1. Single Trajectory Level
A single trajectory, which, due to an altered flight envelope, aims to reveal differences with regard to the reference aircraft when airborne, is discussed in the following paragraph. The reference aircraft serves the AT72, which was presented in Section 3.
Figure 12 illustrates the implications when introducing the SRV2. Most of the flights of the reference aircraft AT72 cover relatively short distances. When picking a larger distance, one can already observe a substantial extension in flight time, as shown in Figure 12a. This directly relates to the achievable airspeeds, as depicted in Figure 12b. Variances in altitude are not observable, though the rate of climb is smaller compared to the reference aircraft, which is shown in Figure 12c. To obtain a better understanding of the distribution of the flight time, over 400 flights are presented in Figure 12d.
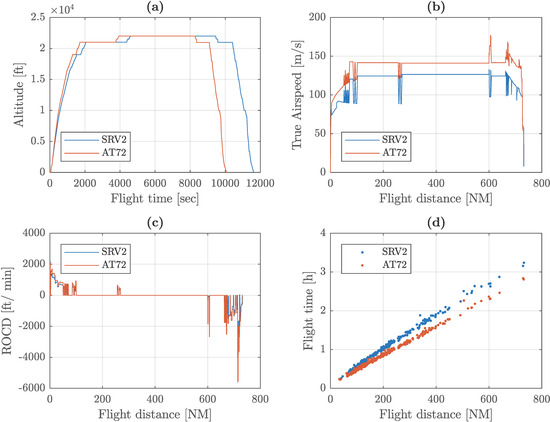
Figure 12.
Comparison of the trajectory and flight performance data for the reference aircraft AT72 and the all-electric aircraft SRV2.
4.2. Airport Level
In this subsection, implications on the airport level are investigated at the surrounding TMA and the airport itself. Due to its high number of all-electric aircraft, Athens Airport (LGAV) was chosen. Firstly, two key performance indicators (KPIs), as defined by ICAO [26], are calculated in order to reveal effects within the TMA of LGAV. Secondly, the effects on arrival and departure throughput are presented. For both aspects, an unlimited number of charging facilities at LGAV are assumed. In the last part, the effects on the airport itself are investigated. Here, different numbers of available charging stations are implemented.
In Figure 13a, the KPI of additional time in terminal airspace is depicted. Compared to the planned flight routes, actual flight trajectories are generally longer in both distance and time due to path deviations, speed reductions, and holding patterns. The KPI08 metric is designed to indicate the average terminal airspace transit time during arrival flights compared to an unimpeded baseline. This metric can also estimate excess fuel consumption and associated emissions near airports. In this context, the unimpeded time is calculated at the airport level and represents the 20th percentile of actual terminal airspace transit times at the analysed airport, ranked from shortest to longest. A generic cylinder with a 40 NM diameter is used to define the shape of the TMA, abstracting the local specifics of TMA design to ensure comparability across different airports. For each arriving flight, the terminal airspace entry time and the actual landing time (ALDT) are recorded. The actual terminal airspace transit time is calculated by subtracting the terminal airspace entry time from the ALDT. Finally, the difference between the actual terminal airspace transit time and the unimpeded terminal airspace transit time represents the additional time spent in the terminal airspace. In Figure 13a, one would expect a larger impact on the KPI, and though it has to be considered, the all-electric aircraft, due to their decreased performance, reduces the overall throughput, thus leading to fewer delays in the TMA.
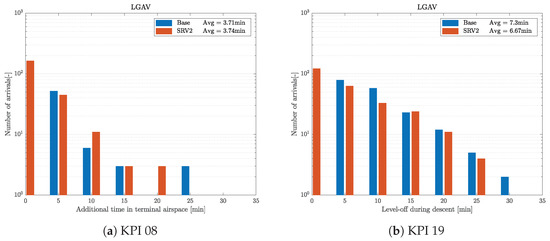
Figure 13.
Additional time in TMA and level-off during descent at Athens Airport (LGAV).
A second KPI is presented in Figure 13b. This KPI is designed to indicate the amount of level flight after the top of descent (TOD). In an optimal descent, no level flight is expected due to the higher fuel burn, increased gaseous emissions, and possibly more noise. Ideally, the aircraft would be able to directly descend from TOD to the threshold. To calculate this KPI, level segments in the descent trajectory within a 200 NM analysis radius are identified, and their respective time durations are determined. Figure 13b presents the average time flown in the level flight after TOD in LGAV. Again, one would expect more deviations from the optimal descent, though a decreased traffic density has to be considered.
In a second step, the implications on arrivals and departures at LGAV shall be discussed. Similarly to Figure 13a,b, an unlimited amount of charging points was available in the computation. Nevertheless, substantial effects can already be observed. During the early hours in Figure 14a, one can detect a decrease in arriving aircraft, probably due to the incoming all-electric aircraft, which slow down the traffic stream. On the departure side on the other hand, see Figure 14b, the early hours still do not show a significant reduction; however, during the day, an increasing delay is observable due to the charging processes on the ground. In contrast to that, when applying the swapping procedure, during the early hours, the arrivals do not deviate considerably, probably due to the all-electric aircraft leaving the airports on time. As expected, the departure throughput is close to the base scenario, since the ground times are not affected.
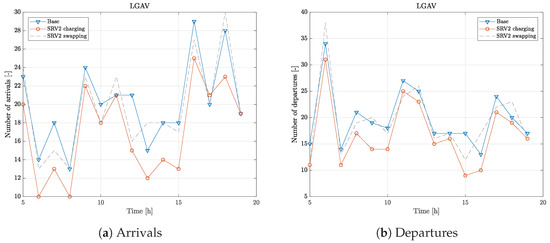
Figure 14.
Throughput at Athens Airport for different battery procedures.
The last aspect on the airport level will illuminate the ground-related effects. Here, only the charging process was considered, due to its enormous implications on the operations in contrast to the swapping procedure of battery modules. Figure 15 visualises the decrease in throughput of LGAV by displaying the actual number of aircraft on the ground over time. Fewer aircraft on the ground equal more throughput at the airport. In this scenario, three configurations of available charging facilities (unlimited, 3 and 5 stations) were adopted.
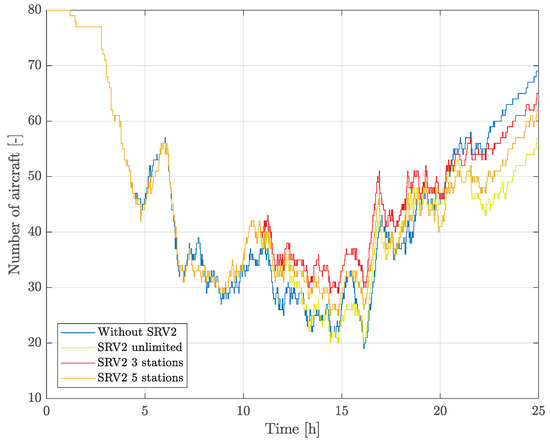
Figure 15.
Number of aircraft on the ground at Athens Airport for different scenarios, charging strategy.
One should consider that, despite the solution with three stations being the closest to the base scenario at the end of the day, this does not relate to a better throughput.
The main influence on the charging duration can also be considered from an infrastructural perspective. Figure 16a reveals the combined power consumption at LGAV over the day. This depiction is derived from an unlimited number of charging stations. As mentioned before, each aircraft consumes 2.8 MW charging performance, which is fairly high compared to current charging facilities, as can be seen in [27], which assumes performances between 300 kW and 450 kW. Since Athens Airport recently installed a new solar power plant, as can also be seen in [28], leading to a combined performance of 23.85 MW, the airport could partially cover the needed electric energy by means of renewables, as indicated in Figure 16a. Here, the elevation angle of the sun for the day of the scenario is displayed in green. In the interest of clarity, the elevation angle was normalised to a maximum value of 23.85 MW. Though one has to bear in mind that the full performance of the solar plant will cover more time during the day, it is a first assumption and highlights the need for battery storage during the night time, designated by the second peek of requested energy. A second aspect, from the infrastructure perspective, is the investment in charging facilities.
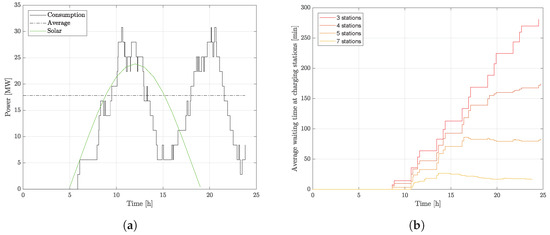
Figure 16.
Power consumption for the SRV2 with an unlimited number of charging stations (a) and average charging times for different scenarios at Athens Airport (b).
Figure 16b illustrates that, even with four available charging points, the average waiting time of the aircraft at the charging point or gate/stand does not converge.
The effect of the extended ground times, whether it is the pure charging time or the waiting time for access to a charging station, has a direct impact on airport throughput, which is illustrated in Figure 17a.
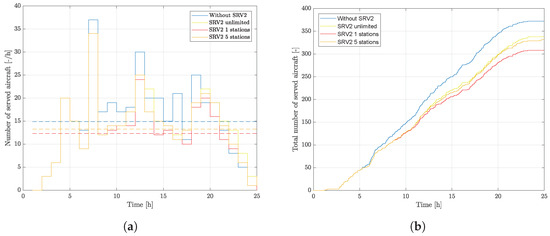
Figure 17.
(a) Number of served aircraft per hour at Athens Airport. (b) Total number of served aircraft at Athens Airport.
As expected, the average throughput (dashed line) of the worst scenario with one available charging facility, leads to a drop of around 17 per cent compared to the base scenario. The aggregated delay depends on the total amount of served aircraft, depicted in Figure 17b, which directly relates to the network, which will be discussed in the following paragraph.
4.3. Network Level
To expose the differences at the network level, an unlimited number of charging facilities at airports are assumed. Figure 18 and Figure 19 illustrate the effects on the European air traffic network when introducing all-electric aircraft in terms of punctuality. With respect to arrivals, illustrated in Figure 18, circles represent the number of arrivals before and after introducing electric aircraft. The pie section within the circles represents the share of electric aircraft at the particular airport. As expected, Athens Airport shows a significant arrival delay of over 47 min.
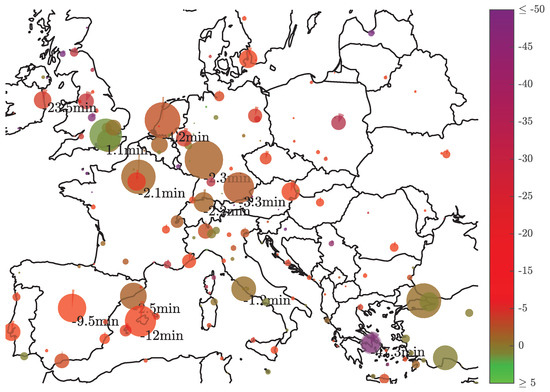
Figure 18.
Comparison of the scenario with and without SRV2 in terms of arrival punctuality. The generic pie chart displays the percentage share of SRV2. The diameter of the circles indicates the number of arrivals.
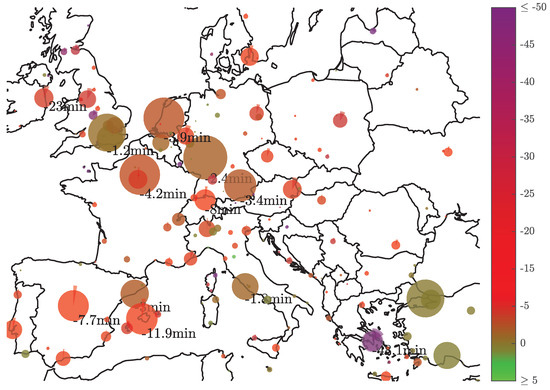
Figure 19.
Comparison of the scenarios with and without SRV2 in terms of departure punctuality. The diameters of the circles indicate the number of departures.
Spoke airports such as Berlin, Warsaw or Dublin are also affected, whereas the high-density traffic area of London Heathrow is not affected by arrival delay, due to less throughput in the TMA. Only small reductions in the numbers of arrivals can be observed in main Hubs such as Schiphol and Frankfurt. On the departure side, see Figure 19, modest reductions are visible in Paris, London, Schiphol, and Frankfurt. This is due to a small share of electric aircraft. Munich is also moderately affected in terms of reduction in both arrival and departure, though a slight delay can be observed.
For the set of smaller airports with high numbers of electric aircraft, see also Figure 10, and the deviations with regard to the base scenario are illustrated in Figure 20. Though some small airports show a relatively high number of electric aircraft, arrivals and departures are affected only on a small scale, due to very limited traffic of those unregulated airports. In contrast, Figure 18, Figure 19 and Figure 20 denote the share of electric aircraft based on the given flight plan.
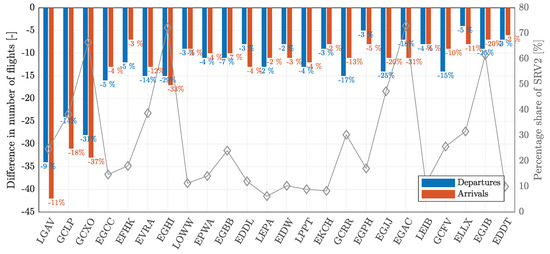
Figure 20.
Comparison of throughput at different airports based on Figure 10 and the according share of SRV2 of the flight plan.
Further insights with regard to possible capacity shortages on the ground can be gained in Figure A7, which lists the first 12 airports of the set, excluding LGAV. Here, the percentage of electric aircraft is given based on the flight plan as well. For example, Lisbon Airport (LPPT) operates close to its gate capacity over the day. Substantial delays could be expected, infused by charging aircraft occupying gates when increasing the share of electric aircraft. Other airports such as LGAV, which is shown in Figure A8, including HUB airports as well, reveal sufficient free gates over the course of the day, thus probably capacity shortages on the ground are not to be expected. Again, another situation similar to LPPT, could occur in Mallorca Airport (LEPA), which operates closer to its gate capacity. With concern to HUB airports, such as Frankfurt (EDDF), Schiphol (EHAM), or London (EGLL), the distribution of traffic over more days, due to long range flights, is visible.
4.4. Discussion
This flow-based study aims to analyse the impact on throughput and punctuality using the example of a newly introduced fully electric aircraft type. Conventional aircraft with a similar range and passenger capacity were replaced in the current flight schedule. The changed flight characteristics of the electric example aircraft SRV2 can clearly be seen in Figure 12 in the area of achievable cruising speed compared to the conventional reference aircraft. This reduced cruising speed already contributes to an influence on the throughput, as can be seen in grey in Figure 14. The grey dashed line in Figure 14 describes the scenario with an assumed swapping process that does not extend the turnaround time on the ground. However, if charging is assumed, the turnaround time is considerably longer and the throughput decreases, as can be seen in Figure 14 in orange. For example, for different numbers of charging stations with the assumed charging capacities, the changes in ground handling can be observed at Athens Airport.
Significantly more aircraft remain on the ground and throughput decreases the fewer charging stations are available. Figure 17 illustrates this correlation. The average handling on the ground drops from approx. 15 aircraft per hour to 12.5 aircraft per hour with one available charging station, as can be seen in Figure 17a. The cumulative implications of the delay can be seen in Figure 17b. Another aspect concerns the CO2 savings intended to be made by electric aircraft. Figure 16a shows the course of the elevation angle of the sun for the example day in green. This serves to illustrate the possible output from the solar panels that can generate just under 24 MW at the peak in Athens Airport. However, the power demand for an assumed swapping scenario is shown in black which exceeds the available power.
The effects at the network level in terms of arrival and departure punctuality, see Figure 18 and Figure 19, confirm the assumption that smaller airports with a higher percentage of electric aircraft are more affected and larger airports are better able to compensate for this, which can be observed at HUB airports, which in percentage terms, contain many long-haul flights, but also airports with certain approach configurations such as Munich or London Airport.
From a flow-based perspective, conclusions can now be drawn about other aspects of the complex air transport system, such as airlines, airports, or the European flow control. The points described above make it clear that, from an economic perspective, the introduction of the fully electric aircraft type poses challenges for both airlines and airports. The long charging times prevent the maintenance of handling capacities and thus the guarantee of transport performance, which is the economic basis. With today’s storage technologies, the purely -free operation of the SRV2 in Athens Airport for the second peak of traffic is also not possible. From an infrastructural point of view, airports will have to make considerable investments and current ground handling processes, as can also be seen in the examples in Figure A5, which may have to be adapted, and could lead to further throughput losses.
The investigation of the operational aspects and their optimisation is currently primarily carried out using agent-based simulations. These include, for example, the complex interactions within an Airline Operation Centre [29]. Thus, questions about the cost-effectiveness of new aircraft types could be analysed with the help of simulations. In order to maintain the transport performance, several aircraft would have to be deployed, which would require a new flight plan and could affect the centralised flow control (enhanced tactical flow management system [30]). This would require further complex simulations. Another way of compensating for transport performance could be at a higher level by integrating multi-modal modes of transport.
For example, a comprehensive hinterland simulation in the SE²A cluster [31,32] can be used to connect the railway network. In contrast to the gate-to-gate view presented here, a door-to-door view is possible. The availability of passenger demands [33] could be used to determine whether rail-based modes of transport can compensate for the restrictions that occur, especially regionally. This particularly applies to shorter routes, but can be difficult due to topological conditions (such as islands around Athens Airport). A further consideration of the impact of electrically powered aircraft with regard to an overall system evaluation, considering the market behaviour or various policies, for example, is the system dynamics approach, as can also be seen in [34].
5. Outlook
This study examined the effects on European air traffic when introducing fully electrically powered aircraft. Taking into account the specifications from the aircraft design of the all-electric aircraft SRV2, a set of BADA coefficients was abstracted, using regression in order to be able to map all flight phases. Furthermore, the ground processes were adjusted, considering tangible assumptions concerning charging performances. The investigation related to the individual trajectory and placed a greater focus on the operational impact at airports and effects on the network itself. Significant disruptions were detected, both on the ground and in the network, which in some cases lead to considerable delays and throughput losses. The single trajectory level itself showed substantial impacts, especially with respect to the flight duration.
With regard to the network, the study resulted in a 3.03% fuel savings for 7.16% of the flights replaced by the all-electric SRV2. Additionally, a 2.23% reduction in the total number of flights across Europe has been observed. In order to achieve the goal of sustainable emissions reduction, additional fully electric aircraft would have to be introduced into the flight plan. Due to greater distances that can no longer be covered with the range of the electric model, rescheduling with additional flights to cover the transport demand of passengers is required. This, in turn, can lead to capacity bottlenecks for available gates and parking spaces at some airports, as already indicated for the Palma de Mallorca Airport (LEPA). Consequently, delays in processing conventional aircraft will have an increased negative effect on the airport’s throughput.
As only one day was examined in this first investigation, longer periods must be considered for a more complete evaluation. This is relevant, for example, for large hub airports whose total throughput has to be considered over several days due to long-haul flights. Furthermore, in order to identify seasonal differences, calculations would have to be carried out at different months to ultimately obtain a year-round assessment. Another aspect is the investigation into the available electrical energy from renewable energy sources and their implementation at the respective airports. While Athens Airport uses solar energy to cover large parts of its needs, demand peaks are also evident later in the day. This raises the question of suitable power management or, in the case of applying the swapping technology, a charging schedule for battery units. In addition, the implementation of high fidelity propulsion models is envisioned in order to enhance the reliability and to be able to carry out further investigations, e.g., with regard to contrails.
Author Contributions
Conceptualisation, B.Y. and P.F.; methodology, B.Y. and P.F.; software, B.Y. and P.F.; formal analysis, B.Y. and P.F.; investigation, B.Y. and P.F.; data curation, B.Y. and P.F.; writing—original draft preparation, B.Y. and P.F.; writing—review and editing, B.Y., P.F., T.F., and P.H.; visualisation, B.Y. and P.F.; supervision, T.F. and P.H.; project administration, P.H.; funding acquisition, P.H. All authors have read and agreed to the published version of the manuscript.
Funding
We would like to acknowledge the funding by the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) under Germany’s Excellence Strategy—EXC 2163/1—Sustainable and Energy Efficient Aviation—Project ID 390881007.
Data Availability Statement
The comprehensive dataset and MATLAB script used in this work is available from the repository BitBucket under https://bitbucket.org/bekir114/all-electric-aircraft/downloads/ (accessed on 10 July 2024).
Acknowledgments
We acknowledge the support by the Open Access Publication Funds of the Technische Universität Braunschweig. The authors also acknowledge the contributory work of Vincent Steinhauer on the generation of the adapted BADA parameters.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| ALDT | Actual Landing Time |
| AP | Approach |
| APM | Aircraft Performance Model |
| ARPM | Airline Procedure Model |
| ATM | Air Traffic Management |
| ATS | Air Traffic System |
| AdAS | Advanced ATS Simulation Environment |
| BADA | Base of Aircraft Data |
| CAS | Calibrated Airspeed |
| CPACS | Common Parametric Aircraft Configuration Schema |
| CR | Cruise |
| DDR | Demand Data Repository |
| EASA | European Union Aviation Safety Agency |
| eVTOL | Electric Vertical Take-Off and Landing |
| GSE | Ground Service Equipment |
| HEA | Hybrid Electric Aircraft |
| IC | Initial Climb |
| ICAO | International Civil Aviation Organization |
| IFPS | Flight Plan Processing System |
| ISA | International Standard Atmosphere |
| KPIs | Key Performance Indicators |
| LD | Landing |
| MSL | Mean Sea Level |
| MTOW | Maximum Take-Off Weight |
| OPF | Operations Performance File |
| PMAD | Power Management and Distribution |
| ROCD | Rate of Climb or Descent |
| RPM | Revolutions Per Minute |
| SE²A | Sustainable and Energy-Efficient Aviation |
| SRV2 | SE²A Short-Range Aircraft Version 2 |
| TEM | Total-Energy Model |
| TO | Take Off |
| TOD | Top of Descent |
| ULD | Unit Load Device |
| AC | Air Conditioning Unit |
| AS | Air Start Unit |
| BULK | Bulk Train |
| CAT | Catering Truck |
| CB | Conveyor Belt |
| CLEAN | Cleaning Truck |
| FUEL | Fuel Hydrant Dispenser or Tanker |
| GPU | Ground Power Unit |
| LDCL | Lower Deck Cargo Loader |
| LV | Lavatory Vehicle |
| PBB | Passenger Boarding Bridge |
| PS | Passenger Stairs |
| TOW | Tow Tractor |
| ULD | ULD Train |
| WV | Portable Water Vehicle |
| EDDF | Frankfurt Airport |
| EDDL | Düsseldorf Airport |
| EDDM | Munich Airport |
| EDDT | Berlin Tegel Airport |
| EFHK | Helsinki Airport |
| EGAC | George Best Belfast City Airport |
| EGBB | Birmingham Airport |
| EGCC | Manchester Airport |
| EGHI | Southampton Airport |
| EGJB | Guernsey Airport |
| EGJJ | Jersey Airport |
| EGLL | Heathrow Airport |
| EGPH | Edinburgh Airport |
| EHAM | Amsterdam Airport Schiphol |
| EIDW | Dublin Airport |
| EKCH | Copenhagen Airport |
| ELLX | Luxembourg Airport |
| EPWA | Warsaw Chopin Airport |
| EVRA | Riga International Airport |
| GCFV | Fuerteventura Airport |
| GCLP | Gran Canaria Airport |
| GCRR | Lanzarote Airport |
| GCXO | Tenerife North Airport |
| KORD | O’Hare International Airport |
| LEBL | Barcelona El Prat Airport |
| LEIB | Ibiza Airport |
| LEMD | Madrid–Barajas Airport |
| LEPA | Palma de Mallorca Airport |
| LEPA | Palma de Mallorca Airport |
| LFPG | Paris Charles de Gaulle Airport |
| LGAV | Athens International Airport |
| LIRF | Rome Fiumicino Airport |
| LOWW | Vienna International Airport |
| LPPT | Lisbon Airport |
| LSZH | Zurich Airport |
Appendix A

Figure A1.
OPF file for the SRV2 aircraft, available from the repository BitBucket under https://bitbucket.org/bekir114/all-electric-aircraft/downloads/ (accessed on 10 July 2024).
Table A1.
Summary of the BADA operations performance parameters.
Table A1.
Summary of the BADA operations performance parameters.
| Model Category | Symbols | Units | Description |
|---|---|---|---|
| Aircraft type | - | number of engines | |
| engine type | string | Jet, Turboprop or Piston | |
| wake category | string | J, H, M or L | |
| Mass | tonnes | reference mass | |
| tonnes | minimum mass | ||
| tonnes | maximum mass | ||
| tonnes | maximum payload mass | ||
| Flight envelope | kts | maximum operating speed | |
| - | maximum operating Mach number | ||
| feet | maximum operating altitude | ||
| feet | maximum altitude at MTOW and ISA | ||
| Aerodynamics | S | m² | reference wing surface area |
| - | parasitic drag coefficient | ||
| - | induced drag coefficient | ||
| - | parasite drag coeff. (landing gear) | ||
| kts | stall speed [TO, IC, CR, AP, LD] | ||
| Engine thrust | kt-N | 1st max. climb thrust coefficient | |
| feet | 2nd max. climb thrust coefficient | ||
| N | 3rd max. climb thrust coefficient | ||
| - | low altitude descent thrust coefficient | ||
| - | high altitude descent thrust coefficient | ||
| feet | transition altitude for descent thrust | ||
| - | approach thrust coefficient | ||
| - | landing thrust coefficient | ||
| Fuel flow | 1st thrust specific fuel consumption coeff. | ||
| kts | 2nd thrust specific fuel consumption coeff. | ||
| 1st descent fuel flow coefficient | |||
| feet | 2nd descent fuel flow coefficient | ||
| - | cruise fuel flow correction coefficient | ||
| Ground movement | TOL | m | take-off length |
| LDL | m | landing length | |
| span | m | aircraft wingspan | |
| length | m | aircraft length |
Appendix B
Appendix B.1

Figure A2.
Number of different aircraft types at Athens Airport.

Figure A3.
Number of different destinations served by Athens Airport.

Figure A4.
Cutout of the air traffic situation across Europe without (upper) and with SRV2 aircraft (lower). Substituted aircraft SRV2 highlighted in green.
Appendix B.2

Figure A5.
Ramp layout for an A320-200 with (a) ULD loading; (b) bulk loading; and (c) at gate [21].

Figure A6.
Gantt chart for full servicing of an A320-200 [21].
Appendix B.3
Table A2.
List of input data used in the air traffic simulation environment.
Table A2.
List of input data used in the air traffic simulation environment.
| Input Data | Description | Reference |
|---|---|---|
| Flight plan | The so6 Model 1 is used to obtain the set of 4D flight segments consisting of waypoints, information on aircraft type, origin–destination, callsigns, and flight identifiers. It is the last saved flight plan after all the modifications with Integrated Initial Flight Plan Processing System (IFPS) messages. | All this information is managed by EUROCONTROL and was accessed via the Demand Data Repository (DDR) [35]. |
| Navigation | Standard Instrument Departure Routes and Standard Terminal Arrival Routes, holding pattern parameters. | Jeppesen [36]. |
| BADA | The Base of Aircraft Data REVISION 3.9 is a collection of aircraft operation performance parameters and airline procedure parameters, which is used for the simulation of flight trajectories. | All files are maintained within a configuration management system at EUROCONTROL [10,11]. |
Table A3.
List of input data used in the airport simulation environment.
Table A3.
List of input data used in the airport simulation environment.
| Input Data | Description | Reference |
|---|---|---|
| Infrastructure | Information on airport and infrastructure, such as runways, taxiways, and gates. | OurAirports [37], OpenStreetMap [25]. |
| Process times | Aircraft turnaround times including cleaning, catering, re-fuelling, and cargo and baggage handling, plus getting passengers onto and off of the airplane. | Deterministic turnaround sub-process durations were derived from Gantt charts provided by the aircraft manufacturer; see, for example [21]. |
Appendix B.4

Figure A7.
Number of aircraft at different European airports with the highest amount of SRV2 aircraft over time [h]. Blue: Base scenario without SRV2, Orange: With SRV2.

Figure A8.
Number of aircraft at different large-to-medium European airports over time [h]. Blue: Base scenario without SRV2, Orange: With SRV2.
Table A4.
Arrival punctuality differences. Selected airports are highlighted in bold.
Table A4.
Arrival punctuality differences. Selected airports are highlighted in bold.
| Airport ICAO | Avg. Punctuality Difference [min] | Share of SRV2 [%] | Number of Arrivals (SRV2) | Number of Arrivals (Ref) |
|---|---|---|---|---|
| EGJB | −198.6 | 65.22 | 23 | 32 |
| EGHI | −193.76 | 67.74 | 31 | 51 |
| ESSB | −182.96 | 80.95 | 21 | 21 |
| EGAC | −175.81 | 58.33 | 24 | 36 |
| GCXO | −147.5 | 45.45 | 55 | 90 |
| EGJJ | −121.78 | 30.23 | 43 | 56 |
| LOWI | −96.97 | 24.00 | 25 | 30 |
| EVRA | −87.18 | 29.17 | 96 | 110 |
| ELLX | −81.79 | 21.54 | 65 | 75 |
| GCLP | −81.21 | 25.19 | 135 | 166 |
| LOWG | −79.17 | 20.00 | 20 | 22 |
| LFRN | −74.99 | 20.00 | 20 | 26 |
| EICK | −68.62 | 15.63 | 32 | 36 |
| LPPD | −62.19 | 20.83 | 24 | 34 |
| GCRR | −58.91 | 19.74 | 76 | 87 |
| LDZA | −56.38 | 21.74 | 46 | 55 |
| EGPF | −52.64 | 16.49 | 97 | 102 |
| GCFV | −49.12 | 17.86 | 84 | 93 |
| ENTC | −47.72 | 18.52 | 27 | 27 |
| LGAV | −47.33 | 13.33 | 315 | 361 |
| EGPD | −47.24 | 25.00 | 28 | 33 |
| EGBB | −47.1 | 17.89 | 123 | 137 |
| EGMC | −45.64 | 16.00 | 25 | 27 |
| LGSR | −43.36 | 13.21 | 53 | 57 |
| LYBE | −43.35 | 15.91 | 88 | 93 |
| LOWS | −41.13 | 25.00 | 32 | 36 |
| LFKB | −38.38 | 12.86 | 70 | 73 |
| EETN | −38.28 | 17.78 | 45 | 50 |
| EFHK | −38.22 | 16.07 | 224 | 233 |
| LFKC | −37.61 | 13.64 | 22 | 27 |
| ENBO | −37.18 | 10.00 | 20 | 20 |
| ENBR | −36.47 | 16.36 | 55 | 56 |
| EPWA | −34.2 | 11.11 | 243 | 254 |
| EGLC | −33.5 | 25.81 | 31 | 31 |
| LFTH | −33.45 | 8.70 | 23 | 25 |
| LFKJ | −33.43 | 12.50 | 56 | 60 |
| EGNT | −33 | 12.50 | 64 | 65 |
| UKOO | −32.35 | 9.52 | 21 | 21 |
| EDDS | −31.75 | 8.97 | 145 | 152 |
| LFMT | −31.18 | 10.71 | 28 | 28 |
| EGPH | −30.49 | 11.85 | 135 | 145 |
| ENVA | −30.48 | 13.04 | 46 | 46 |
| LPMA | −29.94 | 12.82 | 39 | 39 |
| LFML | −29.79 | 7.26 | 124 | 127 |
| LRCL | −29.31 | 9.09 | 33 | 34 |
| LFKF | −29.07 | 6.98 | 43 | 46 |
| EGCC | −28.21 | 11.20 | 259 | 275 |
| EKBI | −27.56 | 8.00 | 50 | 51 |
| EGFF | −26.97 | 4.17 | 24 | 26 |
| LGZA | −25.55 | 8.11 | 37 | 38 |
Table A5.
Departure punctuality differences. Selected airports are highlighted in bold.
Table A5.
Departure punctuality differences. Selected airports are highlighted in bold.
| Airport ICAO | Avg. Punctuality Difference [min] | Share of SRV2 [%] | Number of Departures (SRV2) | Number of Departures (Ref) |
|---|---|---|---|---|
| ESSB | −222.76 | 76.19 | 21 | 22 |
| EGHI | −161.82 | 59.46 | 37 | 52 |
| EGAC | −157.33 | 67.74 | 31 | 38 |
| GCXO | −149.16 | 50.82 | 61 | 89 |
| EGJB | −133 | 55.56 | 27 | 36 |
| EGJJ | −109.51 | 30.95 | 42 | 56 |
| EVRA | −80.79 | 29.17 | 96 | 111 |
| LOWS | −76.4 | 25.00 | 32 | 35 |
| GCLP | −72.8 | 27.78 | 144 | 168 |
| LDZA | −68.48 | 26.00 | 50 | 57 |
| LOWI | −67.33 | 24.00 | 25 | 29 |
| EGLC | −61.97 | 22.22 | 36 | 36 |
| EGMC | −59.42 | 19.23 | 26 | 26 |
| ELLX | −56.04 | 27.78 | 72 | 76 |
| GCRR | −55.96 | 16.44 | 73 | 88 |
| EGPD | −55.18 | 32.26 | 31 | 34 |
| LPPD | −52.43 | 25.00 | 28 | 36 |
| LFKB | −50 | 16.44 | 73 | 75 |
| LGAV | −48.13 | 16.57 | 338 | 372 |
| LFKC | −46.24 | 13.64 | 22 | 26 |
| EGBB | −46 | 17.61 | 142 | 153 |
| ENTC | −45.81 | 14.81 | 27 | 27 |
| EGPF | −43.31 | 16.51 | 109 | 112 |
| LFTH | −42.59 | 8.33 | 24 | 26 |
| EKBI | −41.75 | 11.76 | 51 | 51 |
| GCFV | −40.71 | 12.50 | 80 | 94 |
| ENVA | −39.08 | 10.42 | 48 | 48 |
| ENBR | −37.35 | 14.29 | 63 | 64 |
| LGSR | −36.99 | 10.42 | 48 | 54 |
| LFKF | −34.69 | 8.51 | 47 | 49 |
| LOWG | −34.36 | 20.00 | 20 | 22 |
| LPMA | −31 | 13.16 | 38 | 38 |
| EETN | −30.52 | 20.00 | 50 | 52 |
| EGPH | −30.31 | 14.77 | 149 | 154 |
| LDZD | −30.14 | 8.57 | 35 | 36 |
| EFHK | −30.06 | 13.24 | 219 | 231 |
| EPKK | −30.05 | 10.61 | 66 | 67 |
| LICJ | −29.43 | 8.05 | 87 | 89 |
| LWSK | −28.84 | 12.00 | 25 | 25 |
| EDDS | −28.39 | 9.55 | 157 | 163 |
| LFKJ | −27.34 | 12.28 | 57 | 61 |
| EPWA | −26.62 | 9.62 | 239 | 250 |
| LYBE | −26.61 | 12.50 | 88 | 96 |
| LDSP | −25.71 | 6.93 | 101 | 106 |
| EICK | −25.54 | 16.13 | 31 | 35 |
| LFBZ | −25.54 | 6.90 | 29 | 31 |
| EGCC | −25.42 | 10.34 | 290 | 306 |
| LEMH | −25.05 | 9.35 | 107 | 111 |
| EYVI | −23.55 | 9.84 | 61 | 62 |
| LEIB | −23.54 | 6.70 | 194 | 202 |
References
- Karpuk, S.; Elham, A. Initial Conceptual Design of a Short-Range Regional Aircraft; SE²A B5.1 Report SR02; TU Braunschweig: Braunschweig, Germany, 2021. [Google Scholar]
- Karpuk, S.; Elham, A. Influence of Novel Airframe Technologies on the Feasibility of Fully-Electric Regional Aviation. Aerospace 2021, 8, 163. [Google Scholar] [CrossRef]
- Schäfer, A.; Barrett, S.; Doyme, K.; Dray, L.; Gnadt, A.; Self, R.; O’Sullivan, A.; Synodinos, A.; Torija, A. Technological, economic and environmental prospects of all-electric aircraft. Nat. Energy 2019, 4, 160–166. [Google Scholar] [CrossRef]
- Hou, B.; Bose, S.; Haran, K. Powering electric aircraft at o’hare airport: A case study. In Proceedings of the 2020 IEEE Power and Energy Society General Meeting (PESGM), Montreal, QC, Canada, 2–6 August 2020; IEEE Computer Society: Washington, DC, USA, 2020; p. 9281871. [Google Scholar] [CrossRef]
- Salucci, F.; Trainelli, L.; Faranda, R.; Longo, M. An optimization Model for Airport Infrastructures in Support to Electric Aircraft. In Proceedings of the 2019 IEEE Milan PowerTech, Milan, Italy, 23–27 June 2019; IEEE: Piscataway, NJ, USA, 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Ortega-Vazquez, M.; Sarker, M.; Pandzic, H. Optimal Operation and Services Scheduling for an Electric Vehicle Battery Swapping Station. IEEE Trans. Power Syst. 2014, 30, 901–910. [Google Scholar] [CrossRef]
- Schmidt, M.; Paul, A.; Cole, M.; Ploetner, K.O. Challenges for ground operations arising from aircraft concepts using alternative energy. J. Air Transp. Manag. 2016, 56 Pt B, 107–117. [Google Scholar] [CrossRef]
- Doctor, F.; Budd, T.; Williams, P.; Prescott, M.; Iqbal, R. Modelling the effect of electric aircraft on airport operations and infrastructure. Technol. Forecast. Soc. Chang. 2022, 177. [Google Scholar] [CrossRef]
- Yildiz, B.; Förster, P.; Langner, J.; Feuerle, T.; Hecker, P. A Hybrid Gate-to-Gate Simulation Environment for the Air Traffic System. Aerospace 2023, 10, 882. [Google Scholar] [CrossRef]
- EUROCONTROL. User Manual for the Base of Aircraft Data (BADA) Revision 3.10; Technical Report 12/04/10-45; EUROCONTROL: Brussels, Belgium, 2012.
- EUROCONTROL. Base of Aircraft Data (Bada) Aircraft Performance Modelling Report; EEC Technical/Scientific Report No. 2009-009; EUROCONTROL: Brussels, Belgium, 2009.
- Bilimoria, K.D.; Sridhar, B.; Grabbe, S.R.; Chatterji, G.B.; Sheth, K. FACET: Future ATM Concepts Evaluation Tool. Air Traffic Control Q. 2001, 9, 1. [Google Scholar] [CrossRef]
- SAAM Reference Manual; Technical Report, Release 3.7.5; EUROCONTROL: Brussels, Belgium, 2010. Available online: https://www.eurocontrol.int/database/system-traffic-assignment-and-analysis-macroscopic-level (accessed on 18 May 2023).
- Hoekstra, J.M.; Ellerbroek, J. BlueSky ATC simulator project: An open-data and open-source approach. In Proceedings of the 7th International Conference on Research in Air Transportation, Philadelphia, PA, USA, 20–24 June 2022. [Google Scholar]
- Poles, D.; Nuic, A.; Mouillet, V. Advanced aircraft performance modeling for ATM: Analysis of BADA model capabilities. In Proceedings of the 29th Digital Avionics Systems Conference, Salt Lake City, UT, USA, 3–7 October 2010; pp. 1.D.1-1–1.D.1-14. [Google Scholar] [CrossRef]
- Harada, A.; Miyamoto, Y.; Miyazawa, Y.; Funabiki, K. Accuracy Evaluation of an Aircraft Performance Model with Airliner Flight Data. Trans. Jpn. Soc. Aeronaut. Space Sci. Aerosp. Technol. Jpn. 2013, 11, 79–85. [Google Scholar] [CrossRef][Green Version]
- Sánchez, C.; Mouillet, V.; Sánchez, J.; Ruiz, M.; Nuic, A. BADA eVTOL Performance Model for UTM Traffic Simulation and Analysis. 2021. Available online: https://www.sesarju.eu/sites/default/files/documents/sid/2021/papers/SIDs_2021_paper_91.pdf (accessed on 9 July 2024).
- Förster, P.; Yildiz, B.; Feuerle, T.; Hecker, P. Approach for Cost Functions for the Use in Trade-Off Investigations Assessing the Environmental Impact of a Future Energy Efficient European Aviation. Aerospace 2022, 9, 167. [Google Scholar] [CrossRef]
- Botero, E.M.; Wendorff, A.; MacDonald, T.; Variyar, A.; Vegh, J.M.; Lukaczyk, T.W.; Alonso, J.J.; Orra, T.H.; Ilario da Silva, C. SUAVE: An Open-Source Environment for Conceptual Vehicle Design and Optimization. In Proceedings of the 54th AIAA Aerospace Sciences Meeting, San Diego, CA, USA, 4–8 January 2016; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2016. [Google Scholar]
- Gudmundsson, S. General Aviation Aircraft Design: Applied Methods and Procedures, 1st ed.; Butterworth-Heinemann: Oxford, UK, 2013. [Google Scholar]
- Airbus. Aircraft Characteristics Airport and Maintenance Planning; A320, Revision No. 39—1 December 2022; Airbus: Leiden, The Netherlands, 2022. [Google Scholar]
- EUROCONTROL. Airport Capacity Imbalance-Study Performance Review Commission. Technical Note. 2020. Available online: https://www.eurocontrol.int/sites/default/files/2020-12/eurocontrol-prc-technical-note-airport-capacity-imbalance-11122020.pdf (accessed on 10 July 2024).
- Schäfer, M.; Strohmeier, M.; Lenders, V.; Martinovic, I.; Wilhelm, M. Bringing up OpenSky: A Large-scale ADS-B Sensor Network for Research. In Proceedings of the 13th IEEE/ACM International Symposium on Information Processing in Sensor Networks (IPSN), Berlin, Germany, 15–17 April 2014; pp. 83–94. Available online: https://opensky-network.org (accessed on 10 July 2024).
- EUROCONTROL. Point Merge-Improving and Harmonising Arrival Operations. Available online: https://www.eurocontrol.int/concept/point-merge (accessed on 10 January 2024).
- Minghini, M.; Frassinelli, F. OpenStreetMap history for intrinsic quality assessment: Is OSM up-to-date? Open Geospat. Data Softw. Stand. 2019, 4, 9. [Google Scholar] [CrossRef]
- KPI Overview. ICAO Ganp Portal. Available online: https://www.icao.int/SAM/Documents/2021-RLA06901-TallerVOLIII-1/KPI%20GANP%206.pdf (accessed on 18 January 2023).
- Alice Commuter Aircraft. Available online: https://www.aerospace-technology.com/projects/alice-commuter-aircraft/ (accessed on 17 April 2024).
- Athens Airport Commissions 15.8 MW Solar Power Plant. Available online: https://balkangreenenergynews.com/athens-airport-commissions-15-8-mw-solar-power-plant/ (accessed on 6 May 2024).
- Bouarfa, S.; Blom, H.A.P.; Curran, R. Agent-Based Modeling and Simulation of Coordination by Airline Operations Control. IEEE Trans. Emerg. Top. Comput. 2016, 4, 9–20. [Google Scholar] [CrossRef]
- EUROCONTROL. Enhanced Tactical Flow Management System. Available online: https://www.eurocontrol.int/system/enhanced-tactical-flow-management-system (accessed on 17 July 2024).
- Clemente, M. Building a real-world traffic micro-simulation scenario from scratch with SUMO. In Proceedings of the Sumo User Conference, Virtual, 9–11 May 2022; Volume 3, pp. 215–230. [Google Scholar] [CrossRef]
- Lopez, P.A.; Behrisch, M.; Bieker-Walz, L.; Erdmann, J.; Flötteröd, Y.; Hilbrich, R.; Lücken, L.; Rummel, J.; Wagner, P.; Wiessner, E. Microscopic Traffic Simulation using SUMO. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2575–2582. [Google Scholar] [CrossRef]
- Tillmann, A.M.; Joormann, I.; Ammann, S.C.L. Reproducible air passenger demand estimation. J. Air Transp. Manag. 2023, 112, 102462. [Google Scholar] [CrossRef]
- Talwar, C.; Joormann, I.; Ginster, R.; Spengler, T.S. How much can electric aircraft contribute to reaching the Flightpath 2050 CO2 emissions goal? A system dynamics approach for european short haul flights. J. Air Transp. Manag. 2023, 112, 102455. [Google Scholar] [CrossRef]
- EUROCONTROL. 2018 Demand Data Repository. Historical Page. Available online: https://www.eurocontrol.int/ddr (accessed on 25 June 2019).
- Jeppesen. NavData. Available online: https://ww2.jeppesen.com/navigation-solutions/navdata/ (accessed on 13 December 2020).
- OurAirports. Available online: https://ourairports.com/data/ (accessed on 15 June 2020).
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).