Figure 1.
’s variation with respect to α for different values of when .
Figure 1.
’s variation with respect to α for different values of when .
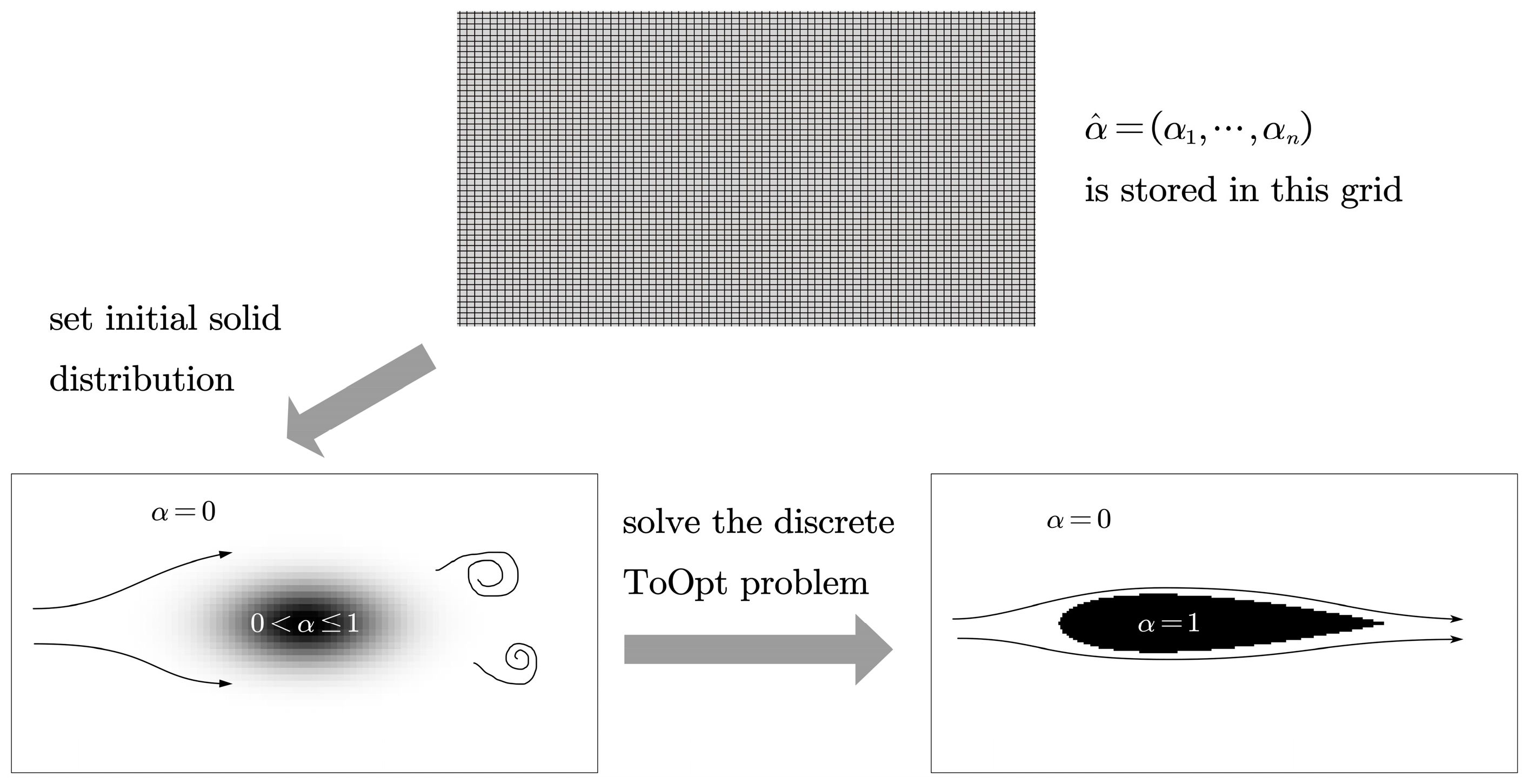
Figure 2.
The solution process of the discrete TopOpt problem.
Figure 2.
The solution process of the discrete TopOpt problem.
Figure 3.
Distribution of the left-hand side of the component of Darcy’s equation in an airfoil case at .
Figure 3.
Distribution of the left-hand side of the component of Darcy’s equation in an airfoil case at .
Figure 4.
Pressure distribution of the domain.
Figure 4.
Pressure distribution of the domain.
Figure 5.
The erroneous wall-distance field calculated by the mesh-wave method that does not take Darcy’s source term into account. (a) The solid modeled by Darcy’s source term. (b) The wall-distance field, , takes a nonzero value at the edge of the modeled solid.
Figure 5.
The erroneous wall-distance field calculated by the mesh-wave method that does not take Darcy’s source term into account. (a) The solid modeled by Darcy’s source term. (b) The wall-distance field, , takes a nonzero value at the edge of the modeled solid.
Figure 6.
Diagram of the computational domain and the result. A gird is used. For clarity, a coarsened grid is shown in (a).
Figure 6.
Diagram of the computational domain and the result. A gird is used. For clarity, a coarsened grid is shown in (a).
Figure 7.
Comparison of the results computed by the proposed method and the analytical solution.
Figure 7.
Comparison of the results computed by the proposed method and the analytical solution.
Figure 8.
Comparison of the results given by the finer grid () and the coarser grid (). The two results are almost identical.
Figure 8.
Comparison of the results given by the finer grid () and the coarser grid (). The two results are almost identical.
Figure 9.
The computational domain and the boundary conditions.
Figure 9.
The computational domain and the boundary conditions.
Figure 10.
distribution at .
Figure 10.
distribution at .
Figure 11.
The computational grid (only part of it is shown) with 20,540 cells.
Figure 11.
The computational grid (only part of it is shown) with 20,540 cells.
Figure 12.
Velocity profile comparison at and .
Figure 12.
Velocity profile comparison at and .
Figure 13.
Evolution of the solid distribution. Optimization is conducted on a grid composed of rectangles.
Figure 13.
Evolution of the solid distribution. Optimization is conducted on a grid composed of rectangles.
Figure 14.
Optimized low-drag profile in turbulent flow.
Figure 14.
Optimized low-drag profile in turbulent flow.
Figure 15.
Convergence history of the nondimensional, approximate drag. The value in Equation (8) is set to 0.005 here.
Figure 15.
Convergence history of the nondimensional, approximate drag. The value in Equation (8) is set to 0.005 here.
Figure 16.
Smoothed optimized profile.
Figure 16.
Smoothed optimized profile.
Figure 17.
Body-fitted mesh generated around the smoothed profile obtained at . The corresponding mesh for is quite similar.
Figure 17.
Body-fitted mesh generated around the smoothed profile obtained at . The corresponding mesh for is quite similar.
Figure 18.
Profile comparisons at ; the symbols are the results given by the original LSKE model with solid-wall boundary conditions. For every 0.1 increase in x, the result is shifted to the right by 1.5 units.
Figure 18.
Profile comparisons at ; the symbols are the results given by the original LSKE model with solid-wall boundary conditions. For every 0.1 increase in x, the result is shifted to the right by 1.5 units.
Figure 19.
Profile comparison at . The symbols are the results given by the original LSKE model with solid-wall boundary conditions. For every 0.1 increase in x, the result is shifted to the right by 1.5 units.
Figure 19.
Profile comparison at . The symbols are the results given by the original LSKE model with solid-wall boundary conditions. For every 0.1 increase in x, the result is shifted to the right by 1.5 units.
Figure 20.
The shear stress () comparison at along the wall’s normal direction.
Figure 20.
The shear stress () comparison at along the wall’s normal direction.
Figure 21.
Comparisons of the three computations at (right column: velocity contour; left column: turbulent kinetic energy; region where or is cut off).
Figure 21.
Comparisons of the three computations at (right column: velocity contour; left column: turbulent kinetic energy; region where or is cut off).
Figure 22.
The discrepancy between the results for the body-fitted mesh and the optimization mesh, obtained using the optimized profile at , .
Figure 22.
The discrepancy between the results for the body-fitted mesh and the optimization mesh, obtained using the optimized profile at , .
Figure 23.
Initial condition and flow field.
Figure 23.
Initial condition and flow field.
Figure 24.
Viscous dissipation rate distribution.
Figure 24.
Viscous dissipation rate distribution.
Figure 25.
Convergence history of , major iteration.
Figure 25.
Convergence history of , major iteration.
Figure 26.
Optimized configuration.
Figure 26.
Optimized configuration.
Figure 27.
The viscous dissipation rate is largely reduced in the optimized configuration.
Figure 27.
The viscous dissipation rate is largely reduced in the optimized configuration.
Figure 28.
Body-fitted mesh around the optimized configuration.
Figure 28.
Body-fitted mesh around the optimized configuration.
Figure 29.
Variation in , computed in TopOpt with respect to the log of .
Figure 29.
Variation in , computed in TopOpt with respect to the log of .
Figure 30.
Velocity profiles obtained by the optimization mesh + Darcy’s source term and the body-fitted mesh + solid-wall boundary.
Figure 30.
Velocity profiles obtained by the optimization mesh + Darcy’s source term and the body-fitted mesh + solid-wall boundary.
Figure 31.
Computational domain and the boundary conditions.
Figure 31.
Computational domain and the boundary conditions.
Figure 32.
Illustrative diagram of a centrifugal compressor.
Figure 32.
Illustrative diagram of a centrifugal compressor.
Figure 33.
Convergence history of the energy dissipation.
Figure 33.
Convergence history of the energy dissipation.
Figure 34.
Result of TopOpt. A curved pipe (the white area) formed after TopOpt.
Figure 34.
Result of TopOpt. A curved pipe (the white area) formed after TopOpt.
Figure 35.
Comparison of the optimized configuration and the velocity distribution in laminar and turbulent flows. The laminar velocity distribution was extracted from [
10].
Figure 35.
Comparison of the optimized configuration and the velocity distribution in laminar and turbulent flows. The laminar velocity distribution was extracted from [
10].
Figure 36.
The optimized configurations are all deflected pipes.
Figure 36.
The optimized configurations are all deflected pipes.
Figure 37.
Velocity magnitude distribution of the optimized configuration at and .
Figure 37.
Velocity magnitude distribution of the optimized configuration at and .
Table 1.
Drag coefficient () comparison.
Table 1.
Drag coefficient () comparison.
| | Experiment [41] | Current Solver |
|---|
| | |
Table 2.
The meaning of each line style in
Figure 12.
Table 2.
The meaning of each line style in
Figure 12.
| Line Style | Symbols | Solid Line | Dashed Line |
|---|
| Turbulence model | (Experimental data) | SST | SST |
| Wall distance | (Experimental data) | Mesh wave | 2-Poisson equation |
Table 3.
The comparison of the reattachment point.
Table 3.
The comparison of the reattachment point.
| | Experiment [42] | Current Solver |
|---|
| | |
Table 4.
Relative thickness comparison. The results of the first two columns are drawn from [
9].
Table 4.
Relative thickness comparison. The results of the first two columns are drawn from [
9].
| | [9] | [9] | |
|---|
| Relative thickness | 0.189 | 0.157 | 0.171 |
Table 5.
Parameters at different Reynolds numbers.
Table 5.
Parameters at different Reynolds numbers.
| | | | |
|---|
| 1600 | | |
| 1600 | | |
Table 6.
The turbulence model and the solid representation method correspond to each line style in
Figure 18 and
Figure 19.
Table 6.
The turbulence model and the solid representation method correspond to each line style in
Figure 18 and
Figure 19.
| Line Style | Square Symbols | Solid Line | Dashed Line |
|---|
| Turbulence model | Original LSKE model | Modified LSKE model | Original LSKE model |
| Solid representation | Solid-wall boundary | Darcy’s source term | Darcy’s source term |
Table 7.
comparison.
Table 7.
comparison.
| | Original Configuration | Optimized Configuration |
|---|
| 0.2667 | 0.0532 |
| Reduction in | --- | 80.1% |







































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}