

Crater Triangle Matching Algorithm Based on Fused Geometric and Regional Features

Abstract
1. Introduction
2. Construction of the Geometric Configuration Feature Map
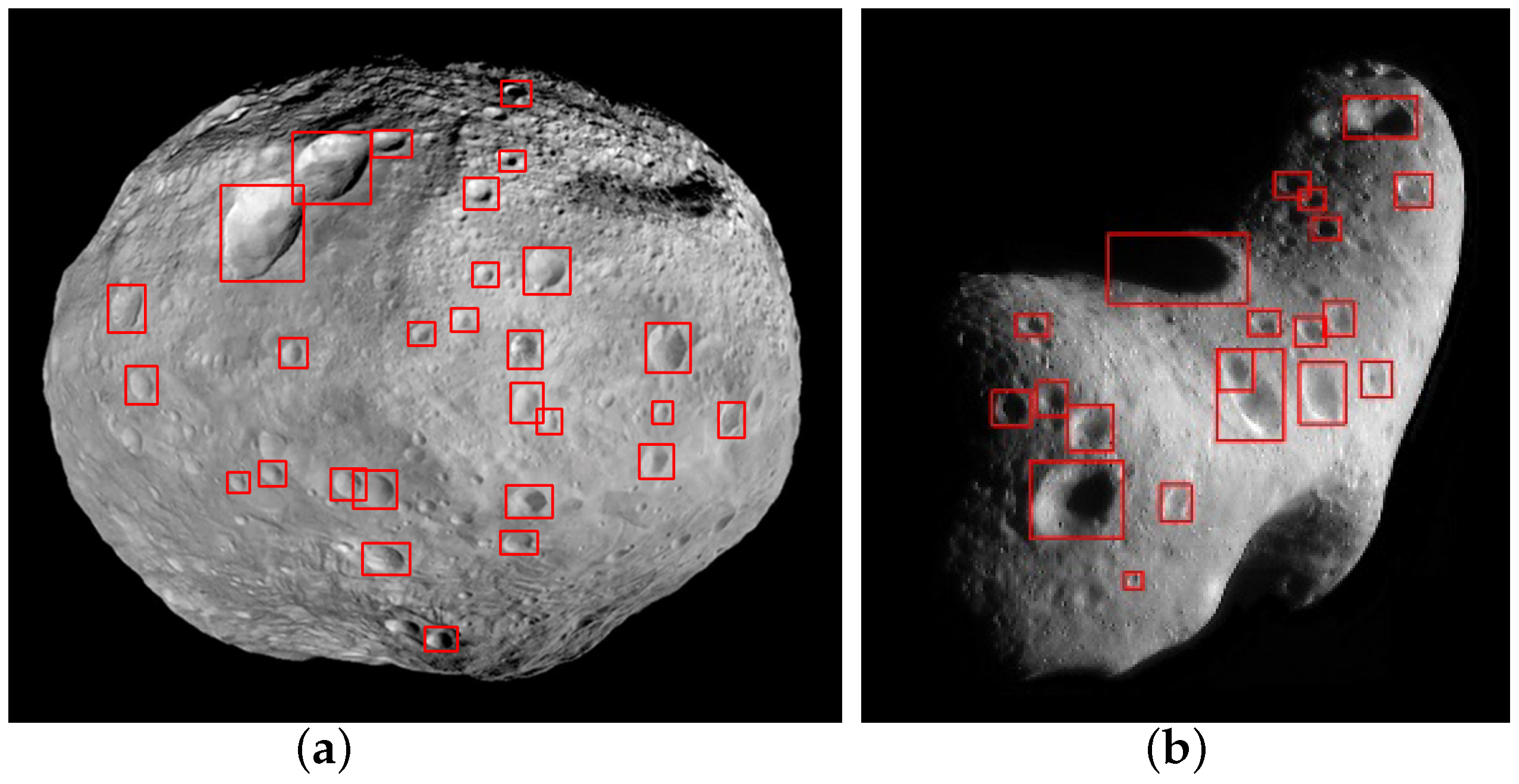
2.1. Crater Detection Based on Deep Learning Method
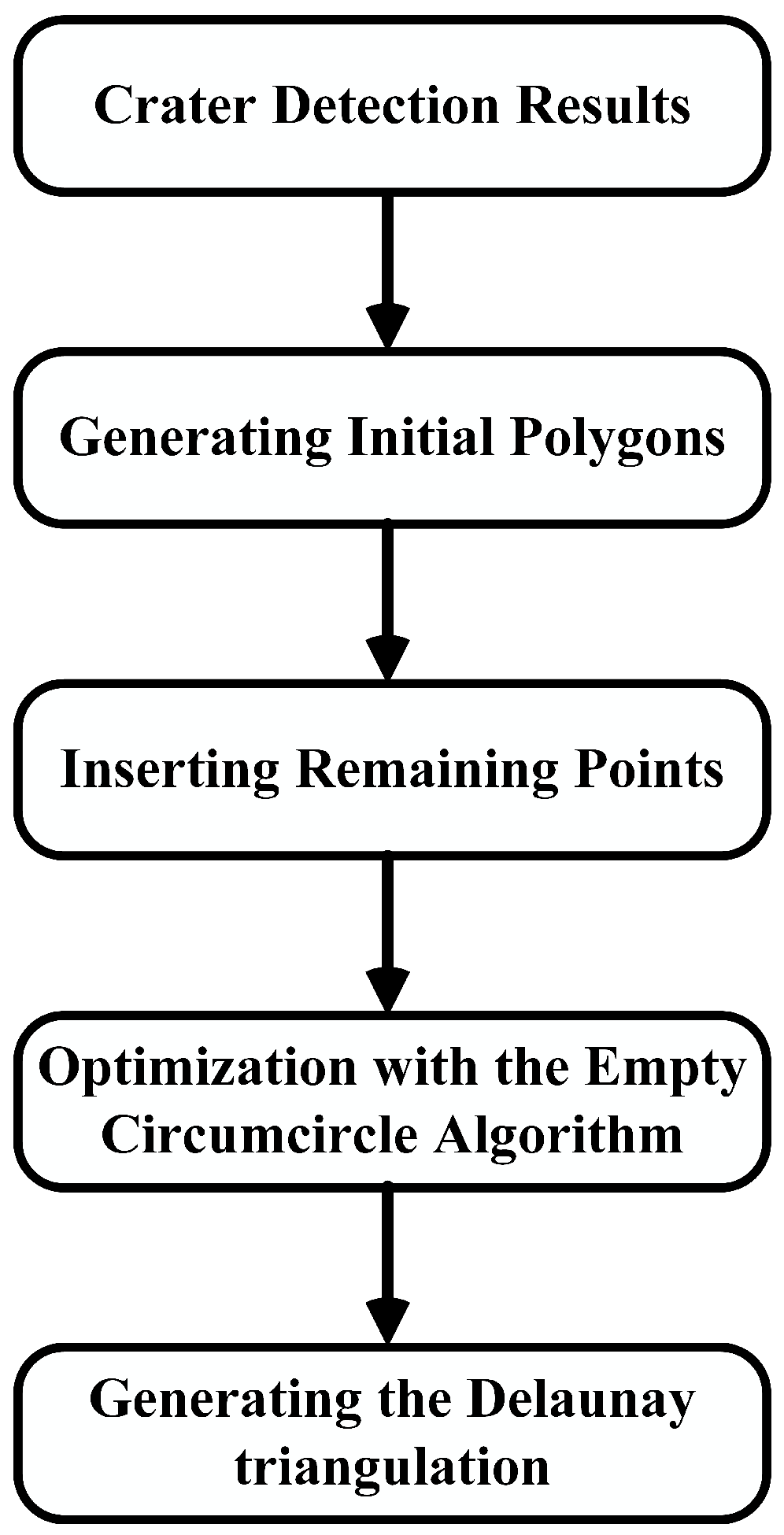
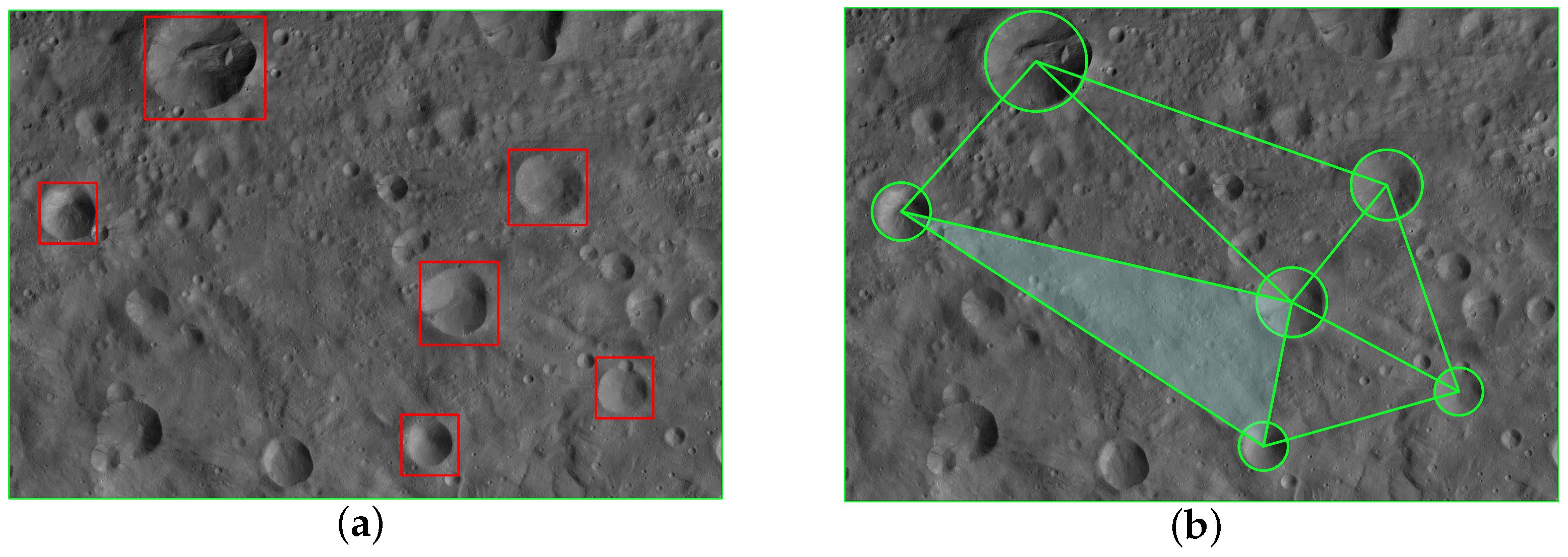
2.2. Delaunay Triangulation
3. Descriptor Construction and Matching
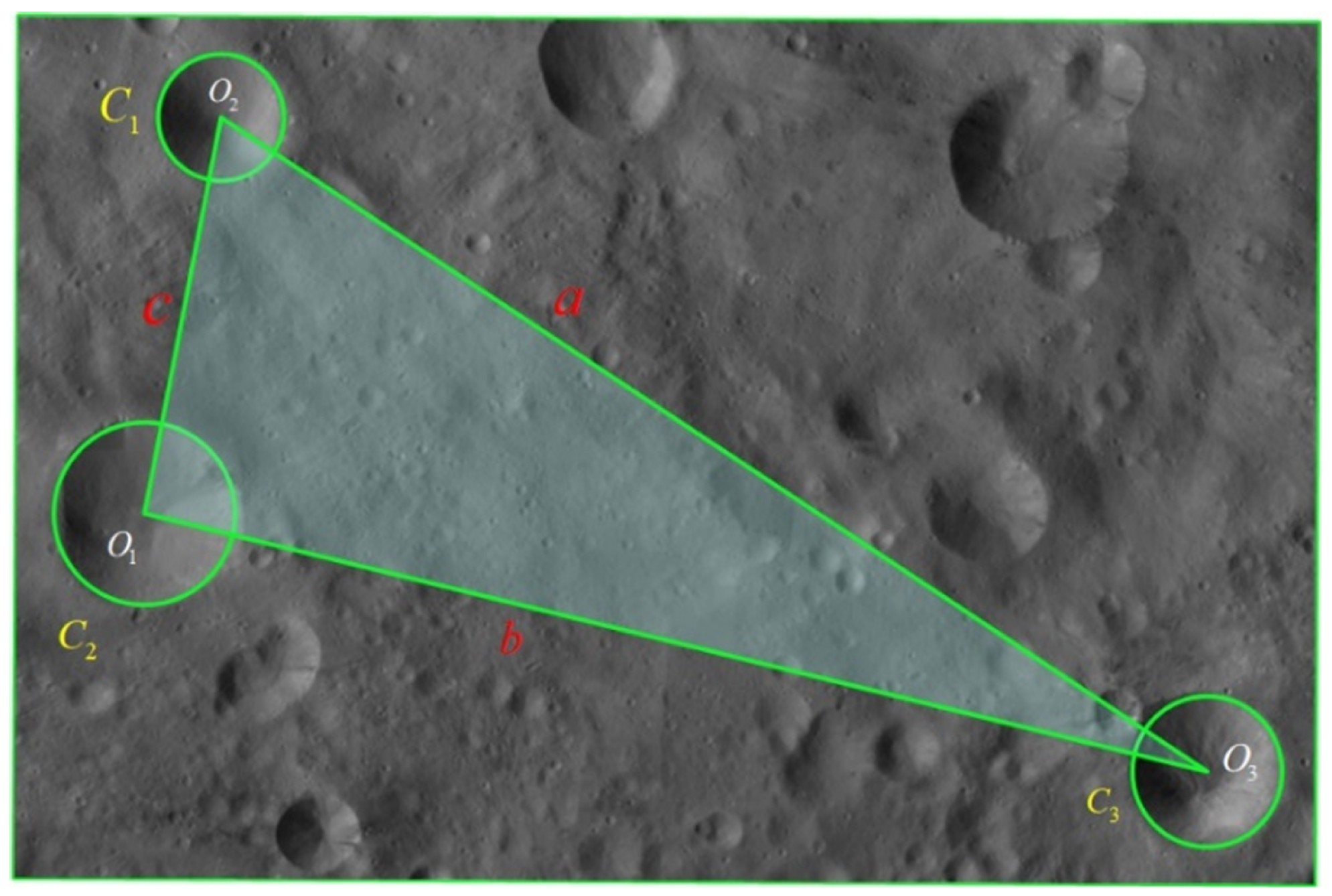
3.1. Geometric Descriptor Construction
3.2. Region Descriptor Construction
3.3. Generating Composite Descriptor
3.4. Descriptor Matching
4. Experiments and Results
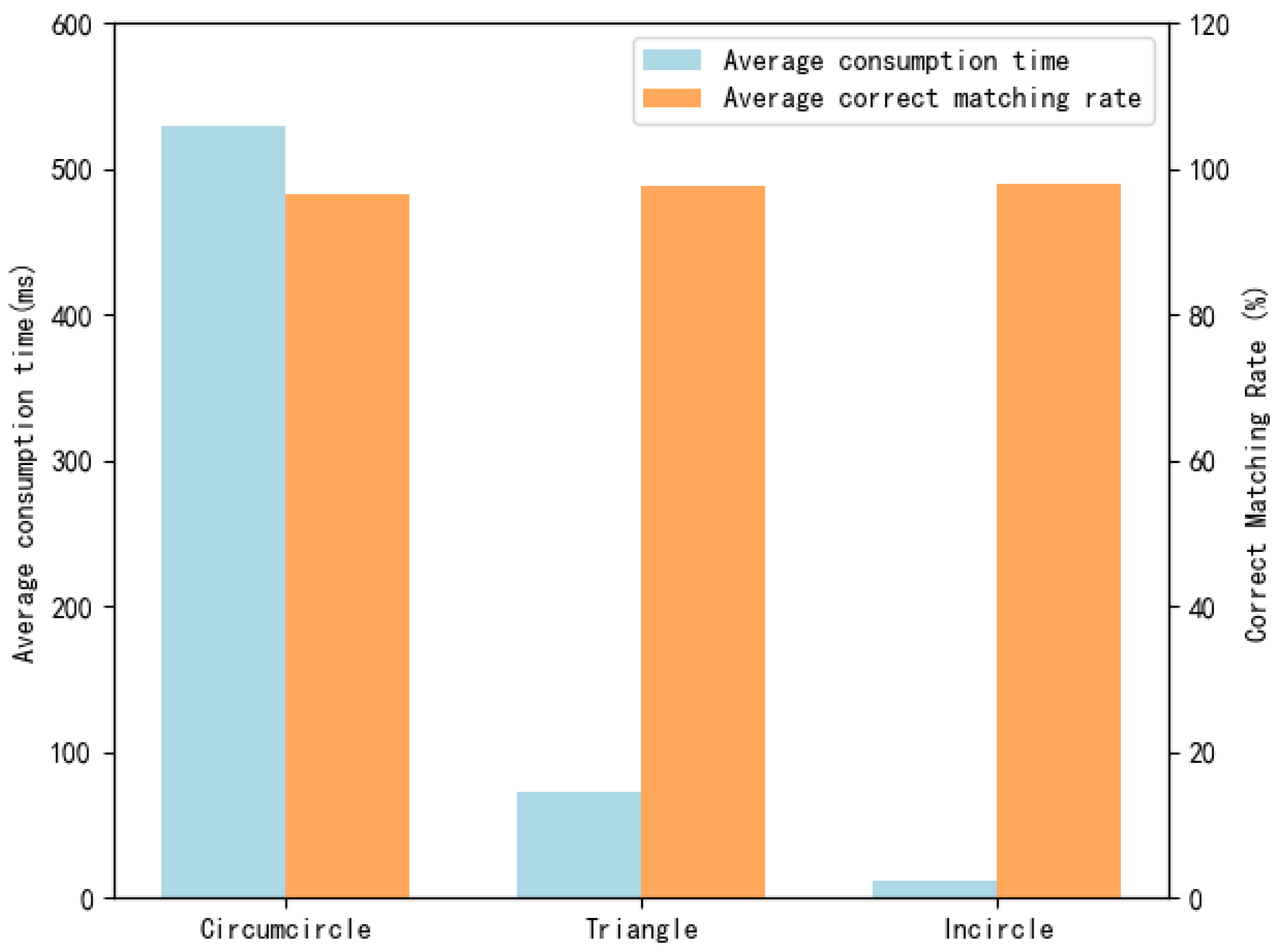
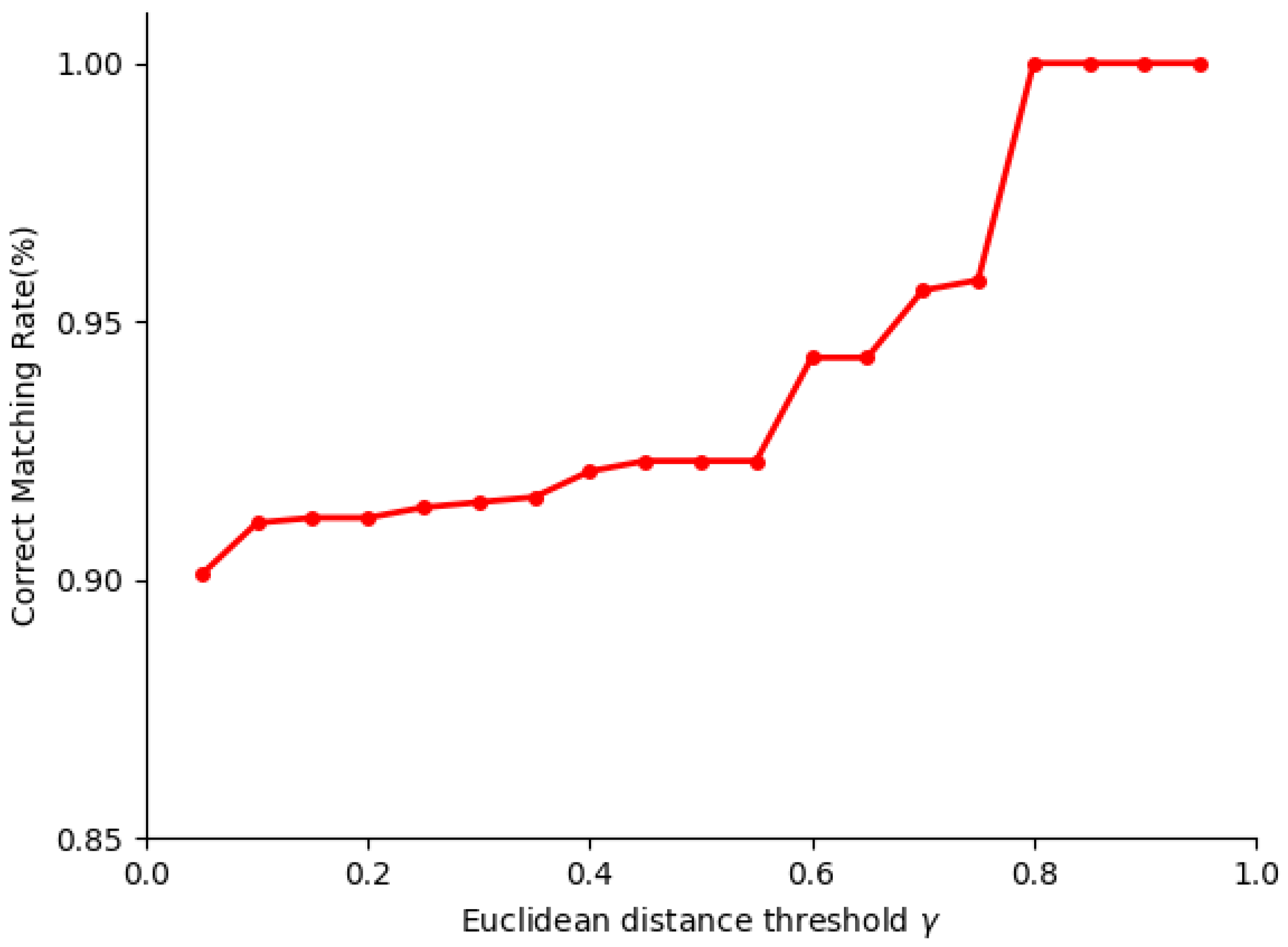
4.1. Parameter Selection
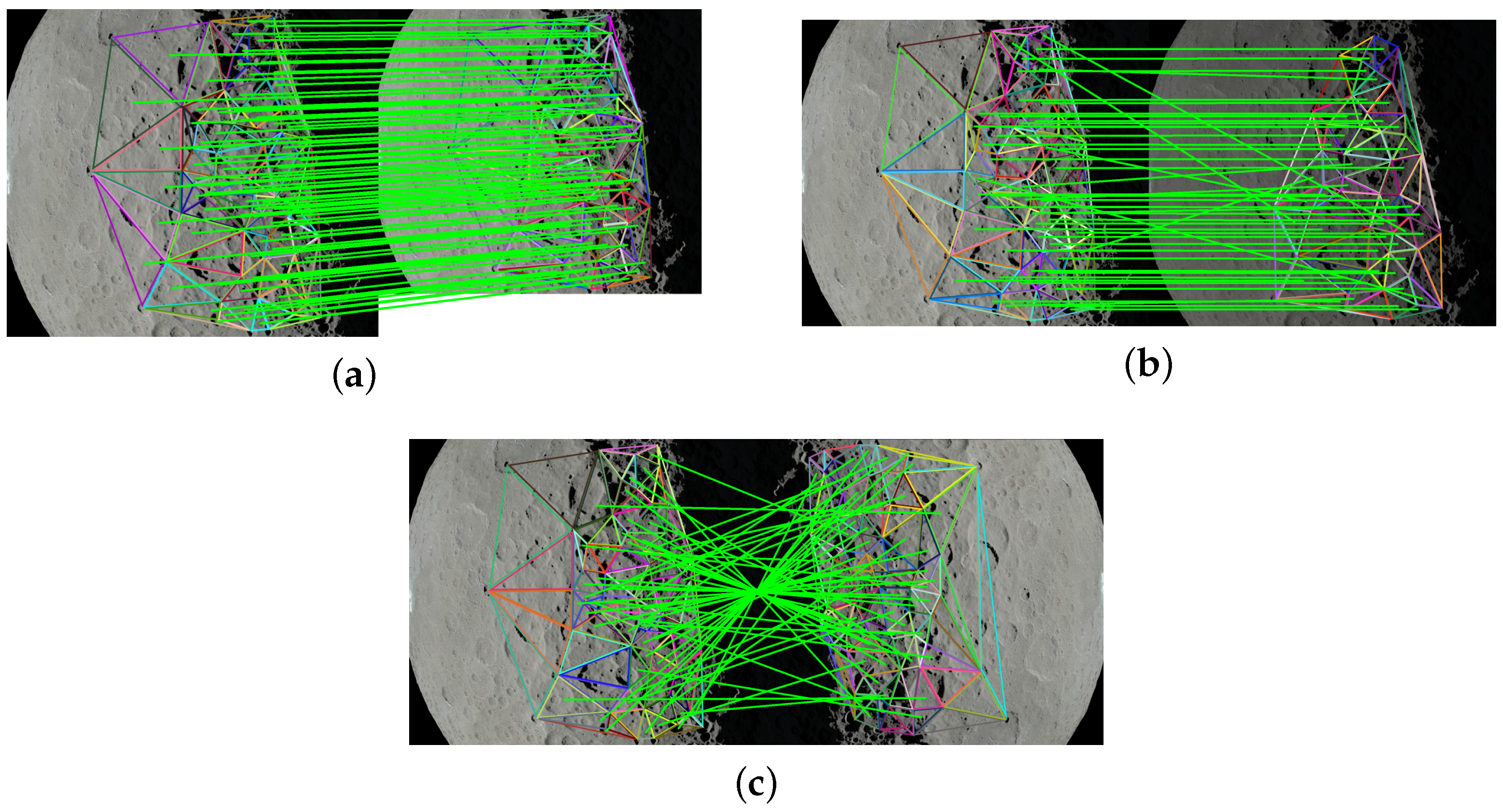
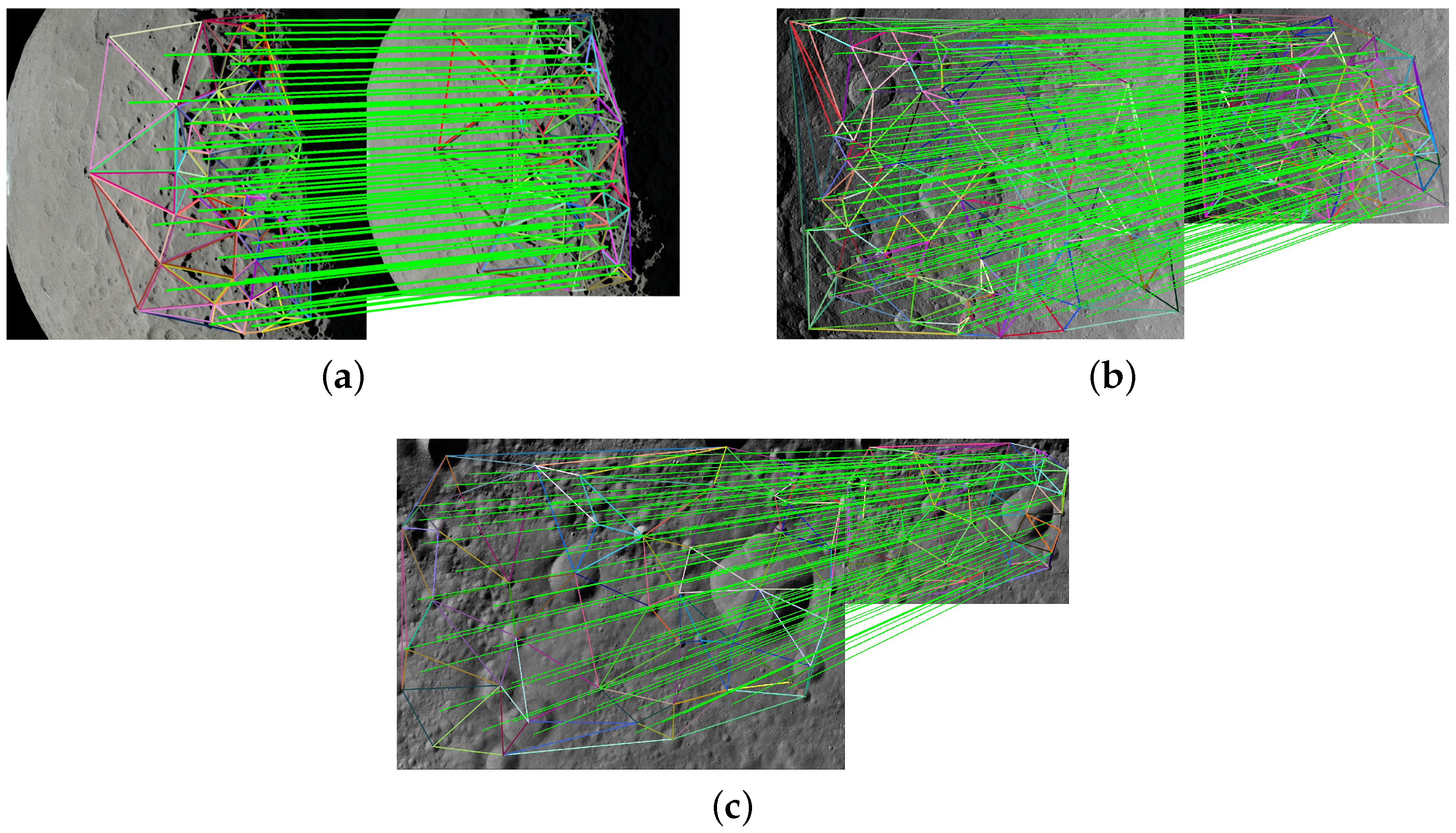
4.2. Ablation Study
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ge, D.T.; Cui, P.Y.; Zhu, S.Y. Recent development of autonomous GNC technologies for small celestial body descent and landing. Prog. Aerosp. Sci. 2019, 110, 100551. [Google Scholar] [CrossRef]
- Anthony, N.; Emami, M.R. Asteroid engineering: The state-of-the-art of Near-Earth Asteroids science and technology. Prog. Aerosp. Sci. 2018, 100, 1–17. [Google Scholar] [CrossRef]
- Robbins, S.J.; Bierhaus, E.B.; Barnouin, O.; Lauer, T.R.; Spencer, J.; Marchi, S.; Weaver, H.A.; Mottola, S.; Levison, H.; Russo, N.D.; et al. Imaging Lunar Craters with the Lucy Long Range Reconnaissance Imager (L’LORRI): A Resolution Test for NASA’s Lucy Mission. Planet. Sci. J. 2023, 4, 234. [Google Scholar] [CrossRef]
- Bowles, N.E.; Snodgrass, C.; Gibbings, A.; Sanchez, J.P.; Arnold, J.A.; Eccleston, P.; Andert, T.; Probst, A.; Naletto, G.; Vandaele, A.C.; et al. CASTAway: An Asteroid Main Belt Tour and Survey. Adv. Space Res. 2018, 62, 1998–2025. [Google Scholar] [CrossRef]
- Accomazzo, A.; Lodiot, S.; Companys, V. Rosetta mission operations for landing. Acta Astronaut. 2016, 125, 30–40. [Google Scholar] [CrossRef]
- Tsuda, Y.; Yoshikawa, M.; Saiki, T.; Nakazawa, S.; Watanabe, S.I. Hayabusa2–Sample return and kinetic impact mission to near-earth asteroid Ryugu. Acta Astronaut. 2019, 156, 387–393. [Google Scholar] [CrossRef]
- Boazman, S.; Kereszturi, A.; Heather, D.; Sefton-Nash, E.; Orgel, C.; Tomka, R.; Houdou, B.; Lefort, X. Analysis of the Lunar South Polar Region for PROSPECT, NASA/CLPS. In Proceedings of the Europlanet Science Congress, EPSC2022-530, Palacio de Congresos de Granada, Granada, Spain, 18–23 September 2022. [Google Scholar]
- Changela, H.G.; Chatzitheodoridis, E.; Antunes, A.; Beaty, D.; Bouw, K.; Bridges, J.C.; Capova, K.A.; Cockell, C.S.; Conley, C.A.; Dadachova, E.; et al. Mars: New insights and unresolved questions. Int. J. Astrobiol. 2021, 20, 394–426. [Google Scholar] [CrossRef]
- Longo, A.Z. The Mars Astrobiology, Resource, and Science Explorers (MARSE) Mission Concept. LPI Contrib. 2024, 3040, 1917. [Google Scholar]
- Tian, Y.; Yu, M.; Yao, M. Crater edge-based flexible autonomous navigation for planetary landing. J. Navig. 2019, 72, 649–668. [Google Scholar] [CrossRef]
- Christian, J.A.; Yao, M. Optical navigation using planet’s centroid and apparent diameter in image. J. Guid. Control. Dyn. 2015, 38, 192–204. [Google Scholar] [CrossRef]
- DeLatte, D.M.; Crites, S.T.; Guttenberg, N.; Yairi, T. Automated crater detection algorithms from a machine learning perspective in the convolutional neural network era. Adv. Space Res. 2019, 64, 1615–1628. [Google Scholar] [CrossRef]
- Wu, Y.; Wan, G.; Liu, L.; Wang, S. Intelligent crater detection on planetary surface using convolutional neural network. In Proceedings of the 5th Advanced Information Technology, Chongqing, China, 13–14 March 2021. [Google Scholar]
- Wang, H.; Jiang, J.; Zhang, G. CraterIDNet: An end-to-end fully convolutional neural network for crater detection and identification in remotely sensed planetary images. Remote Sens. 2018, 10, 1067. [Google Scholar] [CrossRef]
- Chen, Z.; Jiang, J. Crater detection and recognition method for pose estimation. Remote Sens. 2021, 13, 3467. [Google Scholar] [CrossRef]
- Tewari, A.; Verma, V.; Srivastava, P.; Jain, V.; Khanna, N. Automated crater detection from co-registered optical images, elevation maps and slope maps using deep learning. Planet. Space Sci. 2022, 218, 105500. [Google Scholar] [CrossRef]
- DeLatte, D.M.; Crites, S.T.; Guttenberg, N.; Tasker, E.J.; Yairi, T. Segmentation convolutional neural networks for automatic crater detection on mars. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 2944–2957. [Google Scholar] [CrossRef]
- Silburt, A.; Ali-Dib, M.; Zhu, C.; Jackson, A.; Valencia, D.; Kissin, Y.; Daniel, T.; Menou, K. Lunar crater identification via deep learning. Icarus 2019, 317, 27–38. [Google Scholar] [CrossRef]
- Wang, S.; Fan, Z.; Li, Z.; Zhang, H.; Wei, C. An effective lunar crater recognition algorithm based on convolutional neural network. Remote Sens. 2020, 12, 2694. [Google Scholar] [CrossRef]
- Yang, S.; Cai, Z. High-resolution feature pyramid network for automatic Crater detection on Mars. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–12. [Google Scholar] [CrossRef]
- Silvestrini, S.; Lavagna, M. Deep learning and artificial neural networks for spacecraft dynamics, navigation and control. Drones 2022, 6, 270. [Google Scholar] [CrossRef]
- Pauly, L.; Rharbaoui, W.; Shneider, C.; Rathinam, A.; Gaudillière, V.; Aouada, D. A survey on deep learning-based monocular spacecraft pose estimation: Current state, limitations and prospects. Acta Astronaut. 2023, 212, 339–360. [Google Scholar] [CrossRef]
- Lu, T.; Hu, W.; Liu, C.; Yang, D. Relative pose estimation of a lander using crater detection and matching. Opt. Eng. 2016, 55, 023102. [Google Scholar] [CrossRef]
- Park, W.; Jung, Y.; Bang, H.; Ahn, J. Robust crater triangle matching algorithm for planetary landing navigation. J. Guid. Control. Dyn. 2019, 42, 402–410. [Google Scholar] [CrossRef]
- Alfredo, R. A robust crater matching algorithm for autonomous vision-based spacecraft navigation. In Proceedings of the IEEE 8th International Workshop on Metrology for AeroSpace, Naples, Italy, 23–25 June 2021. [Google Scholar]
- Doppenberg, W. Autonomous Lunar Orbit Navigation with Ellipse R-CNN. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 7 July 2021. [Google Scholar]
- Wang, C.Y.; Bochkovskiy, A.; Liao, H.Y.M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, Canada, 18–22 June 2023. [Google Scholar]
- Mark, B.; Cheong, O.; Krevel, M.; Overmars, M. Computational Geometry: Algorithms and Applications; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- NASA Scientific Visualization Studio. Available online: https://svs.gsfc.nasa.gov/4475 (accessed on 20 March 2024).
- NASA Jet Propulsion Laboratory. Available online: https://www.jpl.nasa.gov/images/pia19518-lepida-av-l-14 (accessed on 20 March 2024).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Transformation | Scale | Rotation | Illumination |
|---|---|---|---|
| Correct matching rate/% | 95.8 | 41.2 | 67.1 |
| Transformation | Scale | Rotation | Illumination |
|---|---|---|---|
| Correct matching rate/% | 96.5 | 86.3 | 91.2 |
| Transformation | Scale | Rotation | Illumination |
|---|---|---|---|
| Correct matching rate/% | 100 | 98.9 | 94.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, M.; Shao, W. Crater Triangle Matching Algorithm Based on Fused Geometric and Regional Features. Aerospace 2024, 11, 417. https://doi.org/10.3390/aerospace11060417
Jin M, Shao W. Crater Triangle Matching Algorithm Based on Fused Geometric and Regional Features. Aerospace. 2024; 11(6):417. https://doi.org/10.3390/aerospace11060417
Chicago/Turabian StyleJin, Mingda, and Wei Shao. 2024. "Crater Triangle Matching Algorithm Based on Fused Geometric and Regional Features" Aerospace 11, no. 6: 417. https://doi.org/10.3390/aerospace11060417
APA StyleJin, M., & Shao, W. (2024). Crater Triangle Matching Algorithm Based on Fused Geometric and Regional Features. Aerospace, 11(6), 417. https://doi.org/10.3390/aerospace11060417