
Design and Analysis of the Integrated Drag-Free and Attitude Control System for TianQin Mission: A Preliminary Result


Abstract
1. Introduction
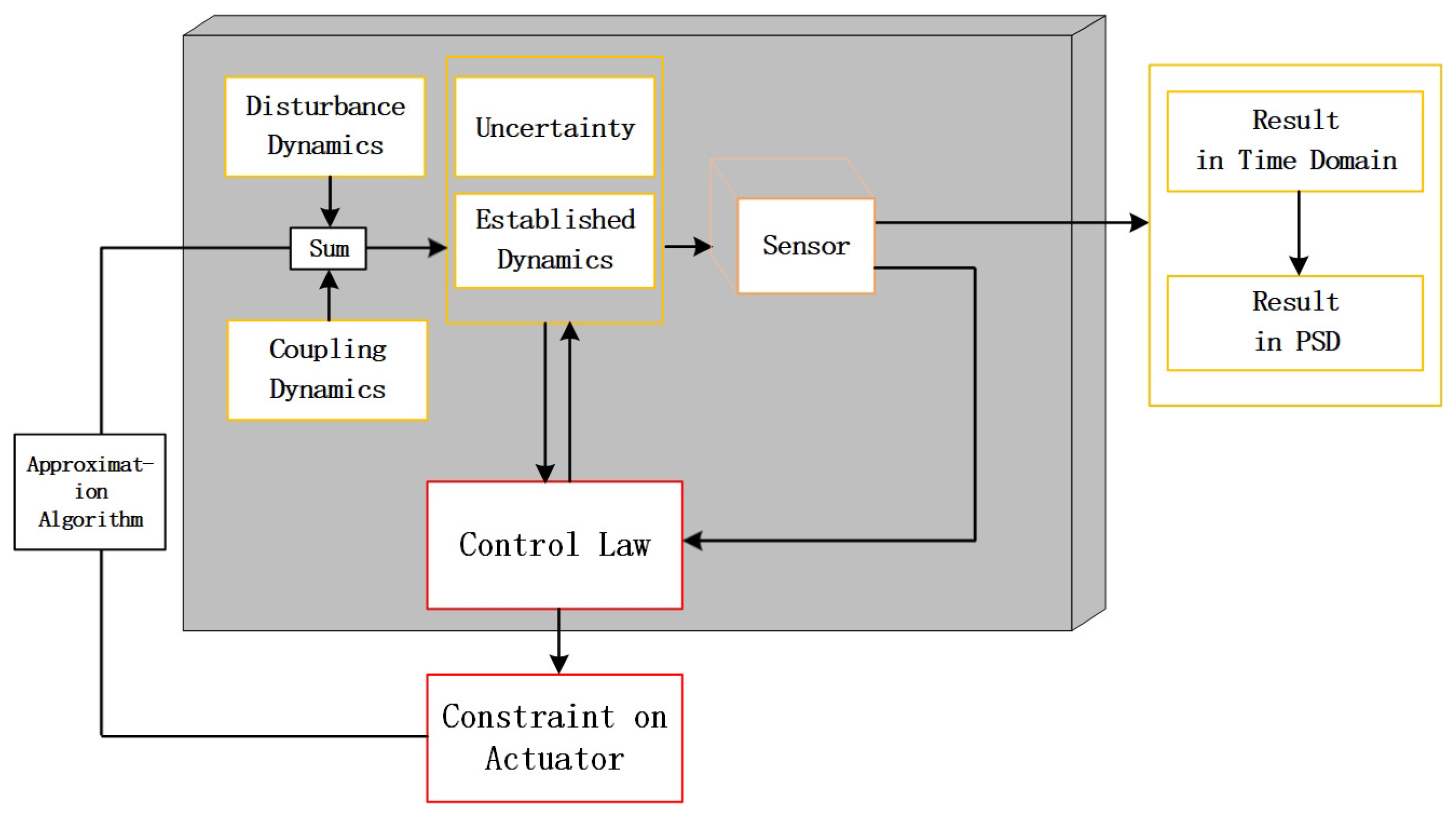
- The complete two-test-mass DFAC system, encompassing both the attitude and orbit, was designed and simulated. In comparison with the single-test-mass system, the control scenario became more intricate.
- A more pragmatic approach was taken toward optimizing the allocation problem of controlling six degrees of freedom with one actuator system. One micro-propulsion system was assigned for the spacecraft’s attitude and orbit control, while two suspension systems were designated for the individual mass block’s attitude and orbit control.
- Adhering to scientific task requirements, appropriate control methods were employed to design the compensation for a significant external disturbance in the drag-free loop using disturbance observers. Additionally, frequency domain algorithms were utilized to design the suspension circuits so they met requirements in the frequency domain.
2. Dynamics and Problem Formulation
- Propose a viable allocation scheme for actuators, including thrusters for the satellite and suspension control actuators for the test masses.
- Devise a disturbance estimator for the satellite and establish an output feedback control law for the satellite based on this estimator.
- Design suspension controllers for the test masses, including attitude loop control laws and orbit error modification between the test masses and relevant cages.
- Numerical simulation using a geocentric orbit in the TianQin mission is provided.
3. Main Results
3.1. Actuator System
3.1.1. Micro-Thrust System
3.1.2. Suspension System
3.2. Predictive Controllers Design for the Spacecraft
3.3. Output Feedback Control for Suspension Loop
3.4. Control Law for Attitude Loops of Test Masses
3.5. DC Compensation
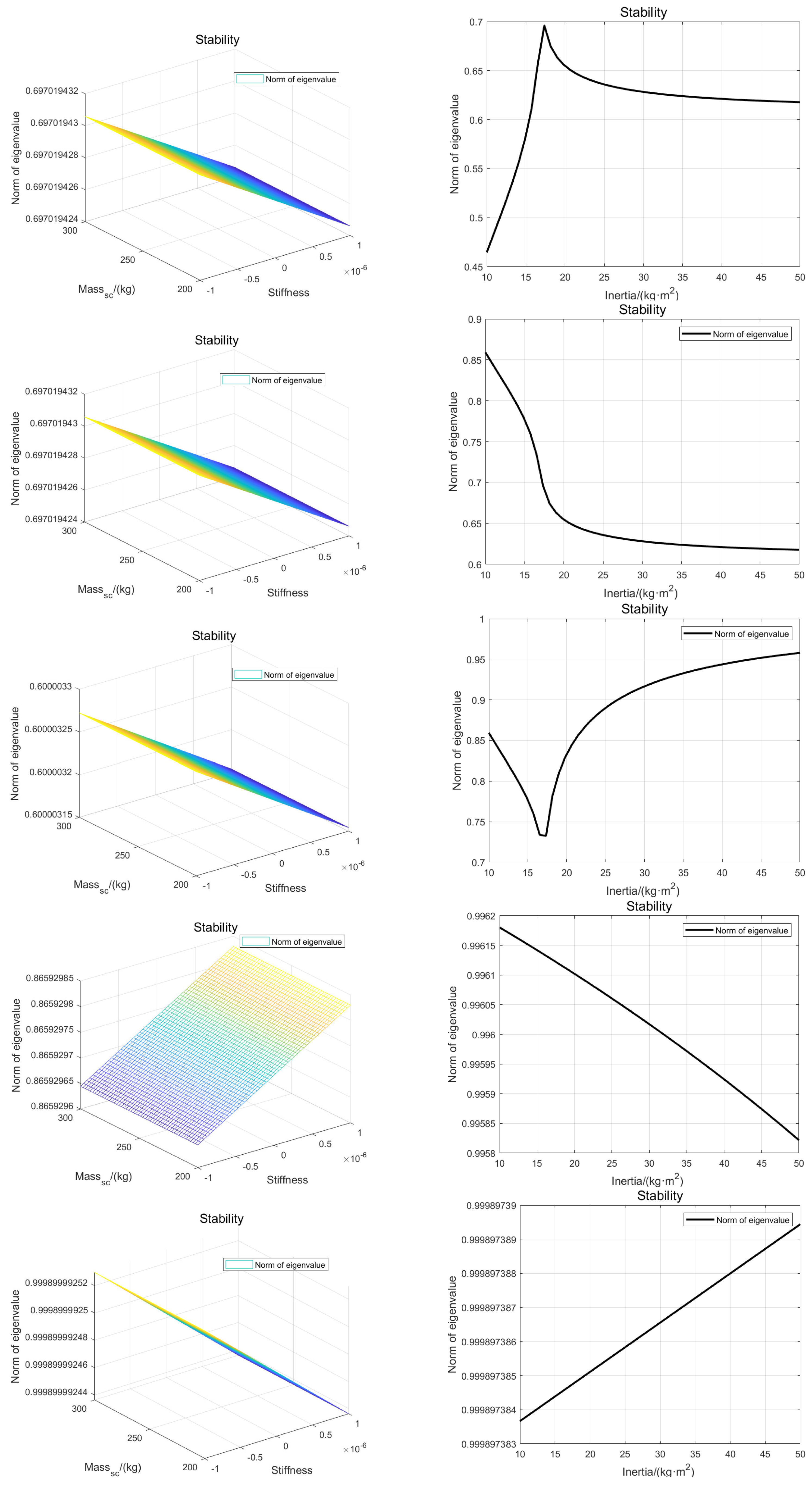
3.6. Stability Analysis
4. Numerical Simulations
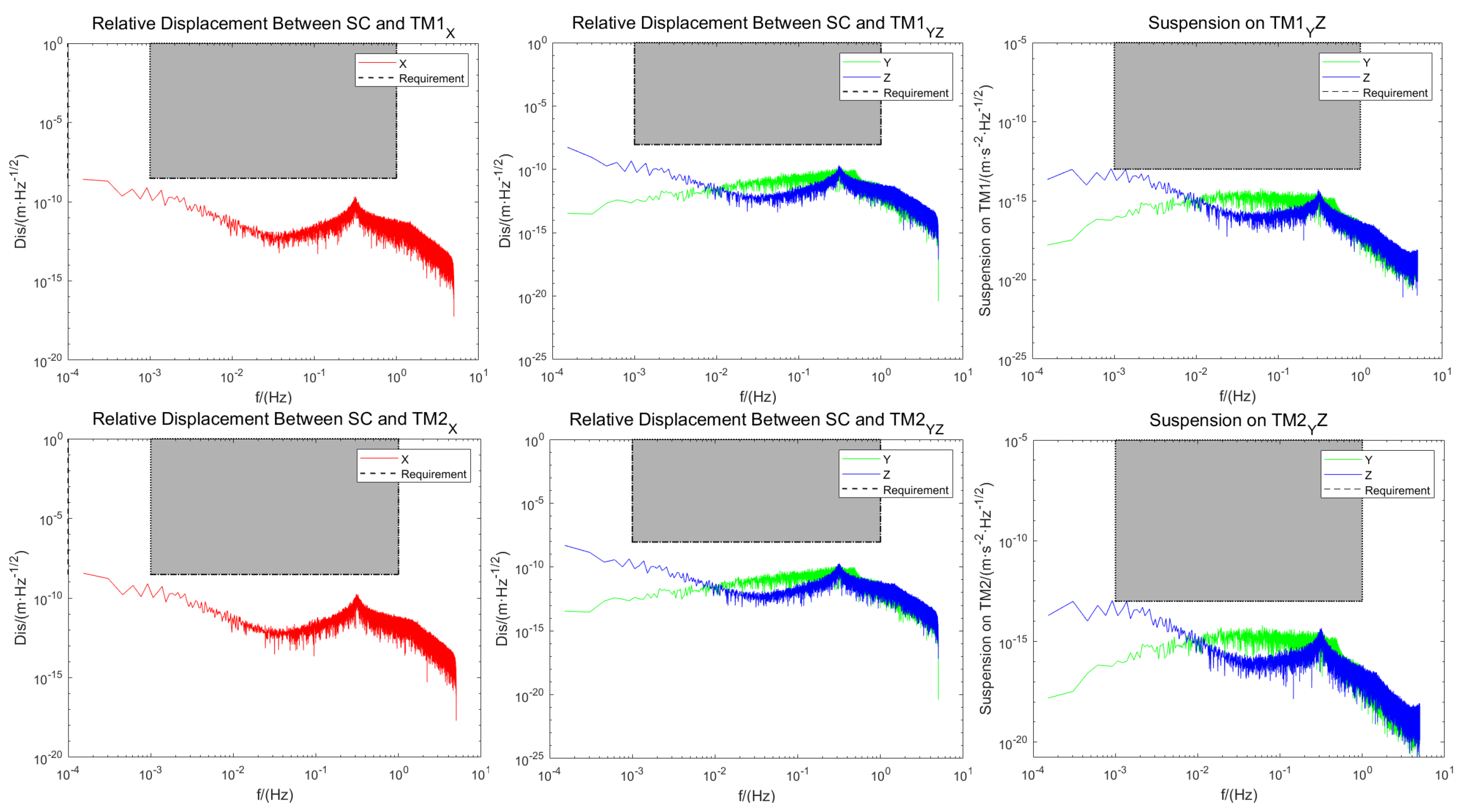
4.1. Requirements
4.2. Boundary Conditions
- where represent TM1 and TM2, respectively.
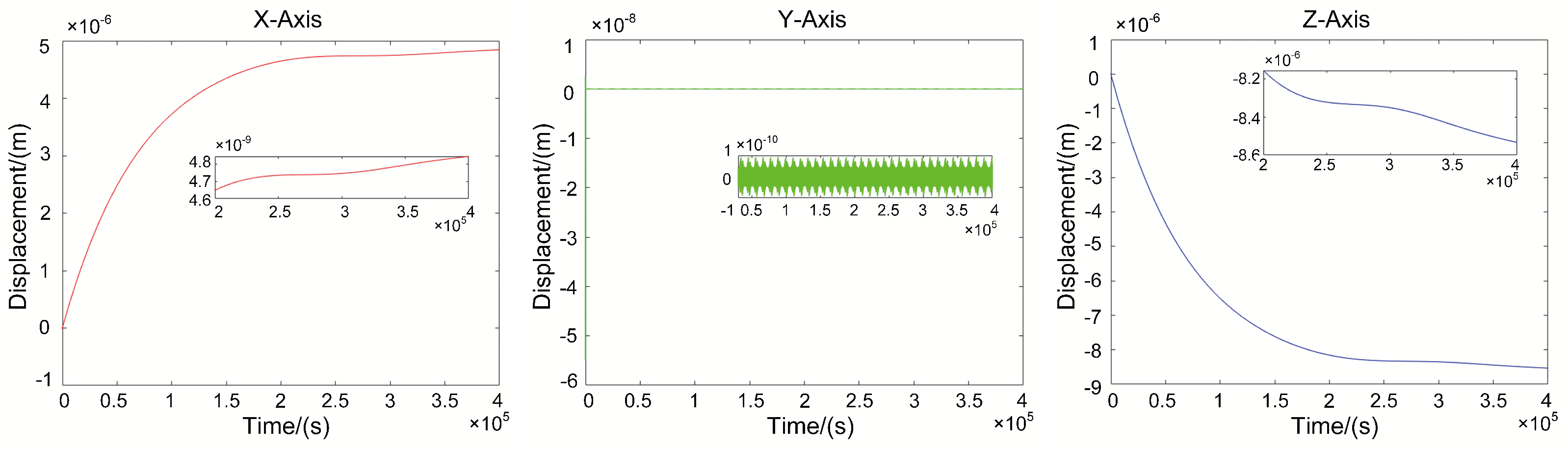
4.3. Simulations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bolton, S.J.; Levin, S.M.; Guillot, T.; Li, C.; Kaspi, Y.; Orton, G.; Wong, M.H.; Oyafuso, F.; Allison, M.; Arballo, J.; et al. Microwave observations reveal the deep extent and structure of Jupiter’s atmospheric vortices. Science 2021, 374, 968–972. [Google Scholar] [CrossRef] [PubMed]
- Choi, S.-J.; Kang, H.; Lee, K.; Kwon, S. A Pattern Search Method to Optimize Mars Exploration Trajectories. Aerospace 2023, 10, 827. [Google Scholar] [CrossRef]
- Palos, M.F.; Janhunen, P.; Toivanen, P.; Tajmar, M.; Iakubivskyi, I.; Micciani, A.; Orsini, N.; Kütt, J.; Rohtsalu, A.; Dalbins, J.; et al. Electric Sail Mission Expeditor, ESME: Software Architecture and Initial ESTCube Lunar Cubesat E-Sail Experiment Design. Aerospace 2023, 10, 694. [Google Scholar] [CrossRef]
- Malgarini, A.; Franzese, V.; Topputo, F. Application of Pulsar-Based Navigation for Deep-Space CubeSats. Aerospace 2023, 10, 695. [Google Scholar] [CrossRef]
- Orosei, R.; Lauro, S.E.; Pettinelli, E.; Cicchetti, A.N.D.R.E.A.; Coradini, M.; Cosciotti, B.; Di Paolo, F.; Flamini, E.; Mattei, E.; Pajola, M.; et al. Radar evidence of subglacial liquid water on Mars. Science 2018, 361, 490–493. [Google Scholar] [CrossRef] [PubMed]
- Ho, G.C.; Krimigis, S.M.; Gold, R.E.; Baker, D.N.; Slavin, J.A.; Anderson, B.J.; Korth, H.; Starr, R.D.; Lawrence, D.J.; McNutt, R.L., Jr.; et al. MESSENGER Observations of Transient Bursts of Energetic Electrons in Mercury’s Magnetosphere. Science 2011, 333, 1865–1868. [Google Scholar] [CrossRef] [PubMed]
- Lange, B. The drag-free satellite. AIAA J. 1964, 2, 1590–1606. [Google Scholar] [CrossRef]
- Sereno, M.; Sesana, A.; Bleuler, A.; Volonteri, M.; Jetzer, P.; Begelman, M.C. Strong Lensing of Gravitational Waves as Seen by LISA. Phys. Rev. Lett. 2010, 105, 251101. [Google Scholar] [CrossRef] [PubMed]
- Toubiana, A.; Sberna, L.; Caputo, A.; Cusin, G.; Marsat, S.; Jani, K.; Babak, S.; Barausse, E.; Caprini, C.; Pani, P.; et al. Detectable Environmental Effects in GW190521-like Black-Hole Binaries with LISA. Phys. Rev. Lett. 2021, 126, 101105. [Google Scholar] [CrossRef]
- Badger, C.; Martinovic, K.; Torres-Forné, A.; Sakellariadou, M.; Font, J.A. Dictionary Learning: A Novel Approach to Detecting Binary Black Holes in the Presence of Galactic Noise with LISA. Phys. Rev. Lett. 2023, 130, 091401. [Google Scholar] [CrossRef]
- Huang, S.; Hu, Y.; Korol, V.; Li, P.C.; Liang, Z.C.; Lu, Y.; Wang, H.T.; Yu, S.; Mei, J. Science with the TianQin Observatory: Preliminary results on Galactic double white dwarf binaries. Phys. Rev. D 2020, 101, 103027. [Google Scholar] [CrossRef]
- Fan, H.; Hu, Y.; Barausse, E.; Sesana, A.; Zhang, J.D.; Zhang, X.; Zi, T.G.; Mei, J. Science with the TianQin Observatory: Preliminary result on extreme-mass-ratio inspirals. Phys. Rev. D 2020, 104, 064008. [Google Scholar]
- Wang, H.; Jiang, Z.; Sesana, A.; Barausse, E.; Huang, S.J.; Wang, Y.F.; Feng, W.F.; Wang, Y.; Hu, Y.M.; Mei, J.; et al. Science with the TianQin Observatory: Preliminary result on massive black hole binaries. Phys. Rev. D 2019, 101, 103027. [Google Scholar] [CrossRef]
- Liang, Z.; Hu, Y.; Jiang, Y.; Cheng, J.; Zhang, J.D.; Mei, J. Science with the TianQin Observatory: Preliminary results on stochastic gravitational-wave background. Phys. Rev. D 2022, 105, 022001. [Google Scholar] [CrossRef]
- Liu, S.; Zhu, L.; Hu, Y.; Zhang, J.D.; Ji, M.J. Capability for detection of GW190521-like binary black holes with TianQin. Phys. Rev. D 2022, 105, 023019. [Google Scholar] [CrossRef]
- Nobili, A.M.; Anselmi, A. Testing the equivalence principle in space after the MICROSCOPE mission. Phys. Rev. D 2018, 98, 042002. [Google Scholar] [CrossRef]
- Wang, G.; Han, W. Observing gravitational wave polarizations with the LISA-TAIJI network. Phys. Rev. D 2021, 103, 024012. [Google Scholar] [CrossRef]
- Wang, G.; Han, W. Alternative LISA-TAIJI networks: Detectability of the isotropic stochastic gravitational wave background. Phys. Rev. D 2021, 104, 104015. [Google Scholar] [CrossRef]
- Omiya, H.; Seto, N. Searching for anomalous polarization modes of the stochastic gravitational wave background with LISA and Taiji. Phys. Rev. D 2020, 102, 084053. [Google Scholar] [CrossRef]
- Van Patten, R.A.; Everitt, C.W.F. Possible Experiment with Two Counter-Orbiting Drag-Free Satellites to Obtain a New Test of Einstein’s General Theory of Relativity and Improved Measurements in Geodesy. Phys. Rev. Lett. 1976, 36, 629–632. [Google Scholar] [CrossRef]
- Armano, M.; Audley, H.; Baird, J.; Binetruy, P.; Born, M.; Bortoluzzi, D.; Castelli, E.; Cavalleri, A.; Cesarini, A.; Cruise, A.M.; et al. LISA Pathfinder Performance Confirmed in an Open-Loop Configuration: Results from the Free-Fall Actuation Mode. Phys. Rev. Lett. 2019, 123, 111101. [Google Scholar] [CrossRef] [PubMed]
- Touboul, P.; Métris, G.; Rodrigues, M.; Bergé, J.; Robert, A.; Baghi, Q.; André, Y.; Bedouet, J.; Boulanger, D.; Bremer, S.; et al. MICROSCOPE Mission: Final Results of the Test of the Equivalence Principle. Phys. Rev. Lett. 2022, 129, 121102. [Google Scholar] [CrossRef] [PubMed]
- Abich, K.; Abramovici, A.; Amparan, B.; Baatzsch, A.; Okihiro, B.B.; Barr, D.C.; Bize, M.P.; Bogan, C.; Braxmaier, C.; Burke, M.J.; et al. In-Orbit Performance of the GRACE Follow-on Laser Ranging Interferometer. Phys. Rev. Lett. 2019, 123, 031101. [Google Scholar] [CrossRef] [PubMed]
- Drinkwater, M.R.; Floberghagen, R.; Haagmans, R.; Muzi, D.; Popescu, A. GOCE: ESA’s First Earth Explorer Core Mission. Space Sci. Rev. 2003, 108, 419–432. [Google Scholar] [CrossRef]
- Kremer, K.; Chatterjee, S.; Breivik, K.; Rodriguez, C.L.; Larson, S.L.; Rasio, F.A. LISA Sources in Milky Way Globular Clusters. Phys. Rev. Lett. 2018, 120, 191103. [Google Scholar] [CrossRef] [PubMed]
- Schumaker, B. Disturbance reduction requirements for LISA. Class. Quantum Gravity 2003, 20, S239–S253. [Google Scholar] [CrossRef]
- Luo, J.; Chen, L.S.; Duan, H.Z.; Gong, Y.G.; Hu, S.; Ji, J.; Liu, Q.; Mei, J.; Milyukov, V.; Sazhin, M.; et al. TianQin: A space-borne gravitational wave detector. Class. Quantum Gravity 2016, 33, 035010. [Google Scholar] [CrossRef]
- Hu, X.C.; Li, X.H.; Wang, Y.; Feng, W.F.; Zhou, M.Y.; Hu, Y.M.; Hu, S.C.; Mei, J.W.; Shao, C.G. Fundamentals of the orbit and response for TianQin. Class. Quantum Gravity 2018, 35, 095008. [Google Scholar] [CrossRef]
- Gerardi, D.; Allen, G.; Conklin, J.W.; Sun, K.X.; DeBra, D.; Buchman, S.; Gath, P.; Fichter, W.; Byer, R.L.; Johann, U.; et al. Advanced drag-free concepts for future space-based interferometers: Acceleration noise performance. Rev. Sci. Instrum. 2014, 85, 1590–1606. [Google Scholar] [CrossRef]
- Liu, H.; Luo, Z.; Jin, G. The development of phasemeter for Taiji space gravitational wave detection. Microgravity Sci. Technol. 2018, 30, 775–781. [Google Scholar] [CrossRef]
- Ye, B.B.; Zhang, X.; Zhou, M.Y.; Wang, Y.; Yuan, H.M.; Gu, D.; Ding, Y.; Zhang, J.; Mei, J.; Luo, J. Optimizing orbits for TianQin. Int. J. Mod. Phys. D 2019, 9, 1950121. [Google Scholar] [CrossRef]
- Canuto, E.S. Drag-free and attitude control for the GOCE satellite. Automatica 2008, 44, 1766–1780. [Google Scholar] [CrossRef]
- Zhang, C.; He, J.; Duan, L.; Kang, Q. Design of an Active Disturbance Rejection Control for Drag-Free Satellite. Microgravity Sci. Technol. 2019, 31, 31–48. [Google Scholar] [CrossRef]
- Delavault, S.; Prieur, P.; Liénart, T.; Robert, A.; Guidotti, P.Y. MICROSCOPE mission: Drag-free and attitude control system expertise activities toward the scientific team. CEAS Space J. 2018, 10, 487–500. [Google Scholar] [CrossRef]
- Liao, H.; Xu, Y.; Zhu, Z.; Deng, Y.; Zhao, Y. A new design of drag-free and attitude control based on non-contact satellite. ISA Trans. 2019, 88, 62–72. [Google Scholar] [CrossRef] [PubMed]
- Canuto, E.; Massotti, L.; Molano-Jimenez, A.; Perez, C.N. Drag-free and attitude control for long-distance, low-Earth-orbit, gravimetric satellite formation. In Proceedings of the 29th Chinese Control Conference, Beijing, China, 29–31 July 2011. [Google Scholar]
- Dang, Z.; Zhang, Y. Relative position and attitude estimation for inner-formation gravity measurement satellite system. Acta Astronaut 2011, 69, 514–525. [Google Scholar] [CrossRef]
- Ji, L.; Liu, K.; Xiang, J. On all-propulsion design of integrated orbit and attitude control for inner-formation gravity field measurement satellite. Sci. China Technol. Sci. 2011, 54, 3233–3242. [Google Scholar] [CrossRef]
- Grynagier, A.; Ziegler, T.; Fichter, W. Identification of dynamic parameters for a one-axis drag-free gradiometer. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 341–355. [Google Scholar] [CrossRef]
- Xiao, C.; Bai, Y.; Li, H.; Liu, L.; Liu, Y.; Luo, J.; Ma, Y.; Qu, S.; Tan, D.; Wang, C.; et al. Drag-free control design and in-orbit validation of TianQin-1 satellite. Class. Quantum Gravity 2022, 39, 155001. [Google Scholar] [CrossRef]
- Gath, P.; Fichter, W.; Kersten, M.; Schleicher, A. Drag free and attitude control system design for the LISA Pathfinder mission. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Providence, RI, USA, 16–19 August 2004. [Google Scholar]
- Wu, S.F.; Fertin, D. Spacecraft drag-free attitude control system design with quantitative feedback theory. Acta Astronaut. 2008, 62, 668–682. [Google Scholar] [CrossRef]
- Gath, P.F.; Schulte, H.R. Drag free and attitude control system design for the LISA science mode. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Hilton Head, SC, USA, 20–23 August 2007. [Google Scholar]
- Sun, X.; Shen, Q.; Wu, S. Partial State Feedback MRAC-Based Reconfigurable Fault-Tolerant Control of Drag-Free Satellite With Bounded Estimation Error. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 6570–6586. [Google Scholar] [CrossRef]
- Sun, X.; Shen, Q.; Wu, S. Event-triggered robust model reference adaptive control for drag-free satellite. Adv. Space Res. 2023, 72, 4984–4996. [Google Scholar] [CrossRef]
- Lian, X.; Zhang, X.; Lu, L.; Wang, J.; Liu, L.; Sun, J.; Sun, Y. Frequency Separation Control for Drag-Free Satellite With Frequency-Domain Constraints. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 4085–4096. [Google Scholar] [CrossRef]
- Hao, L.; Zhang, Y. Extended observer and output feedback control for the preliminary design of tianqin two-test-mass drag-free and attitude control system. In Proceedings of the International Astronautical Congress, Virtual, Online, 12–14 October 2020. [Google Scholar]
- Buffington, J.M.; Kapila, V.; Sparks, A.G. Spacecraft formation flying: Dynamics and control. J. Guid. Control Dyn. 1999, 6, 4137–4141. [Google Scholar]
- Ziegler, T.; Fichter, W. Test mass stiffness estimation for the LISA Pathfinder drag-free system. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Hilton Head, SC, USA, 20–23 August 2007. [Google Scholar]
- Fichter, W.; Schleicher, A.; Bennani, S.; Wu, S. Closed loop performance and limitations of the LISA pathfinder drag-free control system. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Hilton Head, SC, USA, 20–23 August 2007. [Google Scholar]
- Antonucci, F.; Armano, M.; Audley, H.; Auger, G.; Benedetti, M.; Binetruy, P.; Boatella, C.; Bogenstahl, J.; Bortoluzzi, D.; Bosetti, P.; et al. LISA Pathfinder: Mission and status. Class. Quantum Gravity 2011, 28, 094001. [Google Scholar] [CrossRef]
- Weber, W.J.; Bortoluzzi, D.; Cavalleri, A.; Carbone, L.; Da Lio, M.; Dolesi, R.; Fontana, G.; Hoyle, C.D.; Hueller, M.; Vitale, S. Position sensors for flight testing of LISA drag-free control. In Proceedings of the Astronomical Telescopes and Instrumentation, Waikoloa, HI, USA, 26 February 2003. [Google Scholar]
- Han, J.Q. From PID to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Gao, Z.Q. Scaling and bandwidth-parameterization based controller tuning. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Axis | Electrostatic Actuation Signal | Relative Jitter |
|---|---|---|
| X | – | m/Hz1/2 |
| Y | m/(s2·Hz1/2) | 10−9 m/Hz1/2 |
| Z | 10−13 m/(s2·Hz1/2) | m/Hz1/2 |
| Axis | Initial Position Offset | Initial Derivative |
|---|---|---|
| m | m/s | |
| m | m/s | |
| m | m/s | |
| rad/s | ||
| rad/s | ||
| rad/s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hao, L.; Zhang, Y. Design and Analysis of the Integrated Drag-Free and Attitude Control System for TianQin Mission: A Preliminary Result. Aerospace 2024, 11, 416. https://doi.org/10.3390/aerospace11060416
Hao L, Zhang Y. Design and Analysis of the Integrated Drag-Free and Attitude Control System for TianQin Mission: A Preliminary Result. Aerospace. 2024; 11(6):416. https://doi.org/10.3390/aerospace11060416
Chicago/Turabian StyleHao, Liwei, and Yingchun Zhang. 2024. "Design and Analysis of the Integrated Drag-Free and Attitude Control System for TianQin Mission: A Preliminary Result" Aerospace 11, no. 6: 416. https://doi.org/10.3390/aerospace11060416
APA StyleHao, L., & Zhang, Y. (2024). Design and Analysis of the Integrated Drag-Free and Attitude Control System for TianQin Mission: A Preliminary Result. Aerospace, 11(6), 416. https://doi.org/10.3390/aerospace11060416