
Sensitivity Analysis for Design Parameters of Electric Tilt-Rotor Aircraft


Abstract
1. Introduction
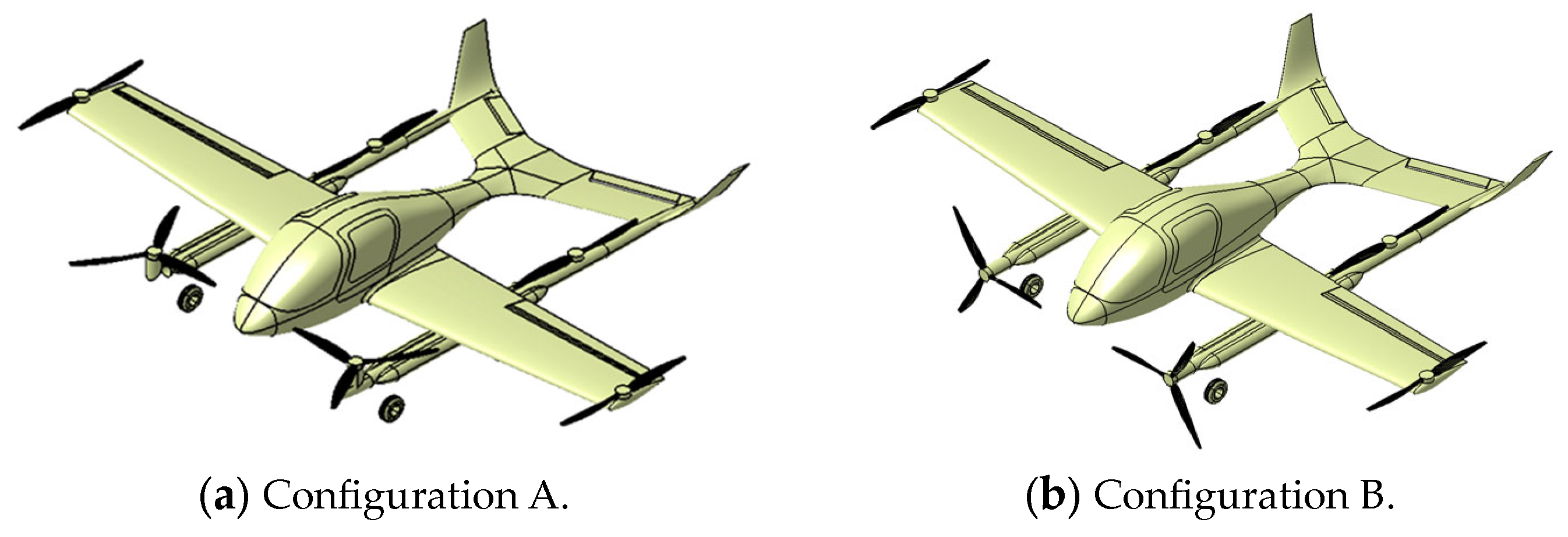
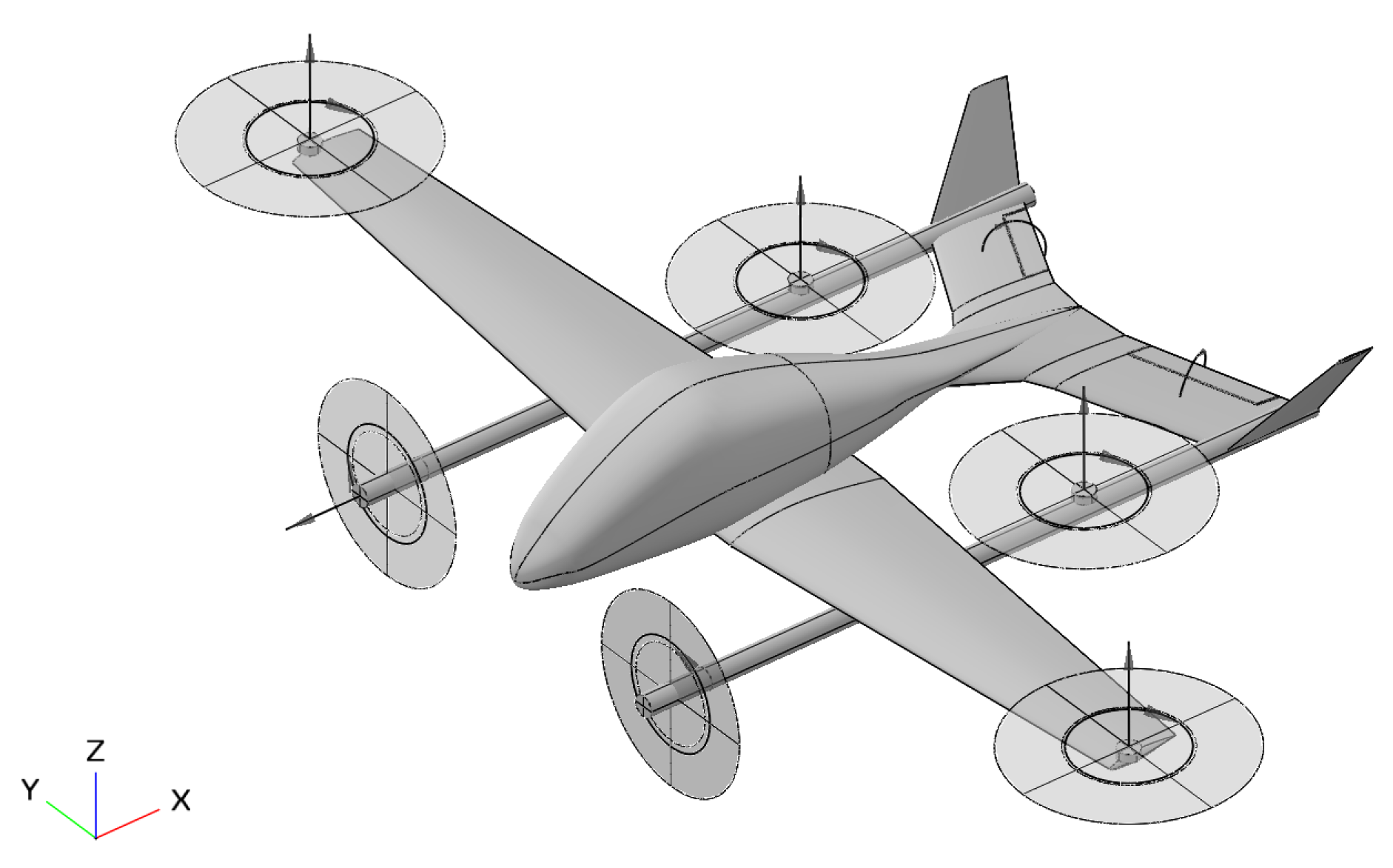
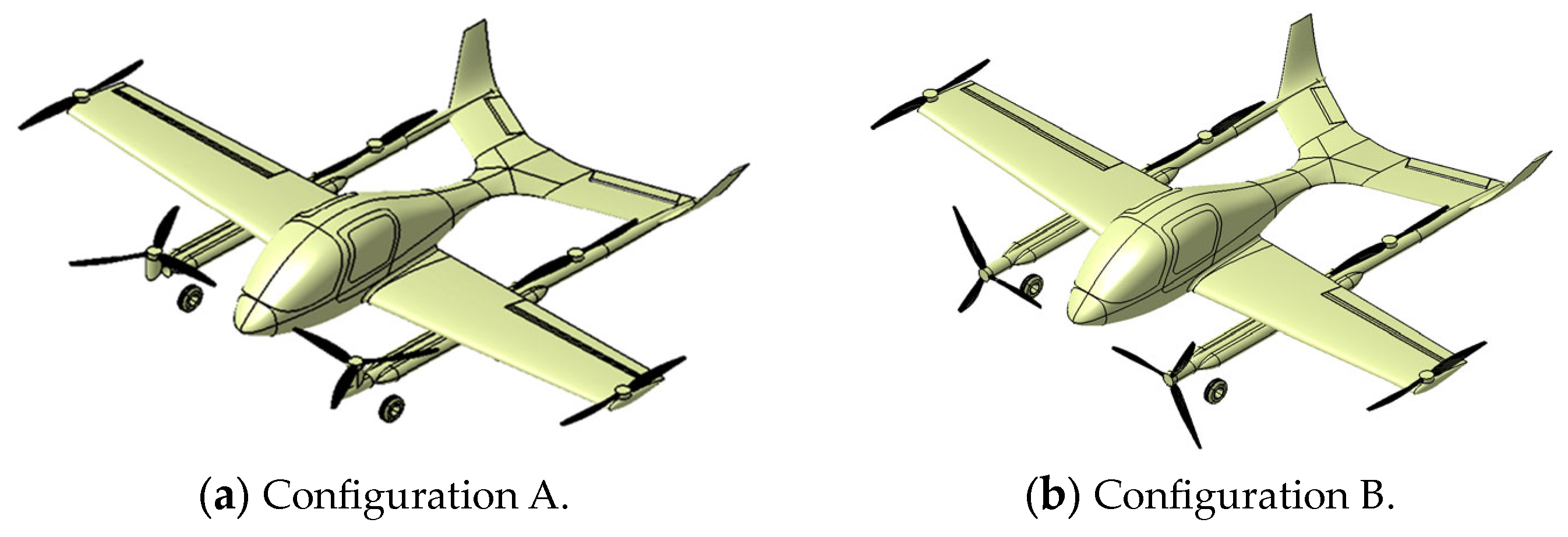
2. The Electric Tilt-Rotor Aircraft
3. Electric Aircraft Conceptual Design Tool
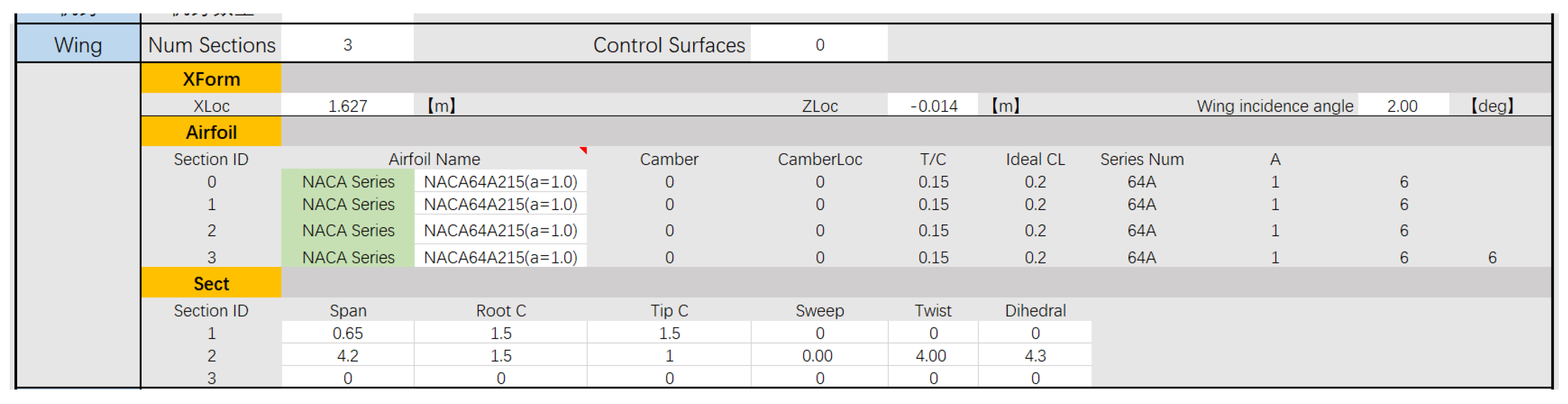
3.1. Parametric Modeling and Aerodynamic Analysis
3.2. Weight Module
3.3. Performance Analysis Module
4. Aircraft Performance Analysis
4.1. Hover and Vertical Climb
4.2. Range
- (a)
- The propeller tilts at a specific angle;
- (b)
- The propeller works at a fixed angle to accelerate the vehicle;
- (c)
- After the flight speed reaches VS0, the propeller will continue to tilt until the tilting is complete.
- (a)
- After reducing the speed and the thrust force of the front propellers to slow down the aircraft to the specified speed of 1.1VS0, the rear four lift-propellers start to work.
- (b)
- The nacelle angle begins to tilt at an angular velocity of 6 degrees per second until the tilting is complete. At this stage the vertical thrust required by the propellers is evenly distributed among the six propellers.
- (c)
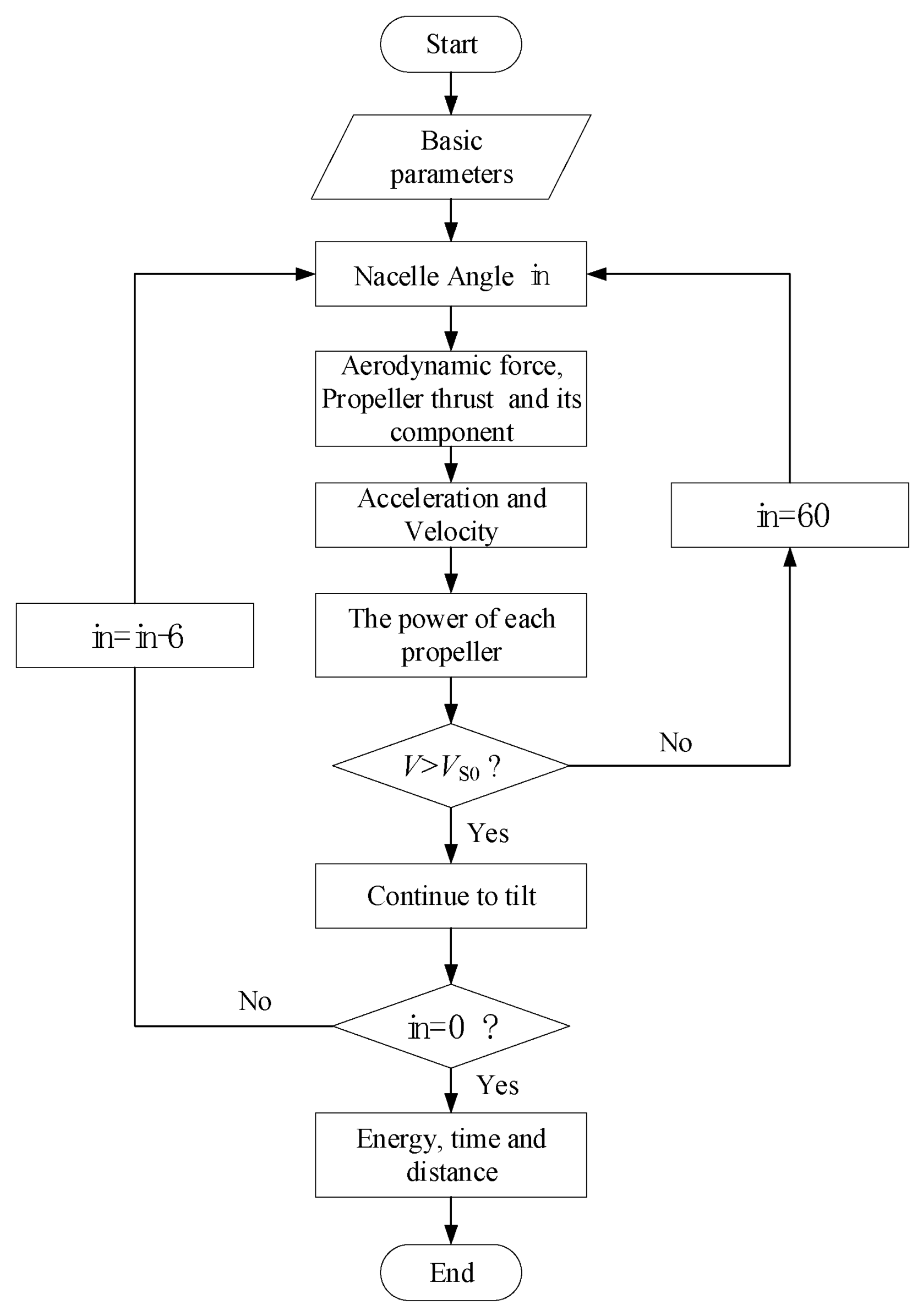
- After the nacelle angle reaches 90 degrees, the aircraft decelerates in the form of multiple propellers by increasing the fuselage angle of attack, which was set at 5 degrees in this paper until the speed reaches zero, and the entire transition process ends. The analysis process is shown in Figure 5.
5. Sensitivity Analysis and Optimization of Key Design Parameters
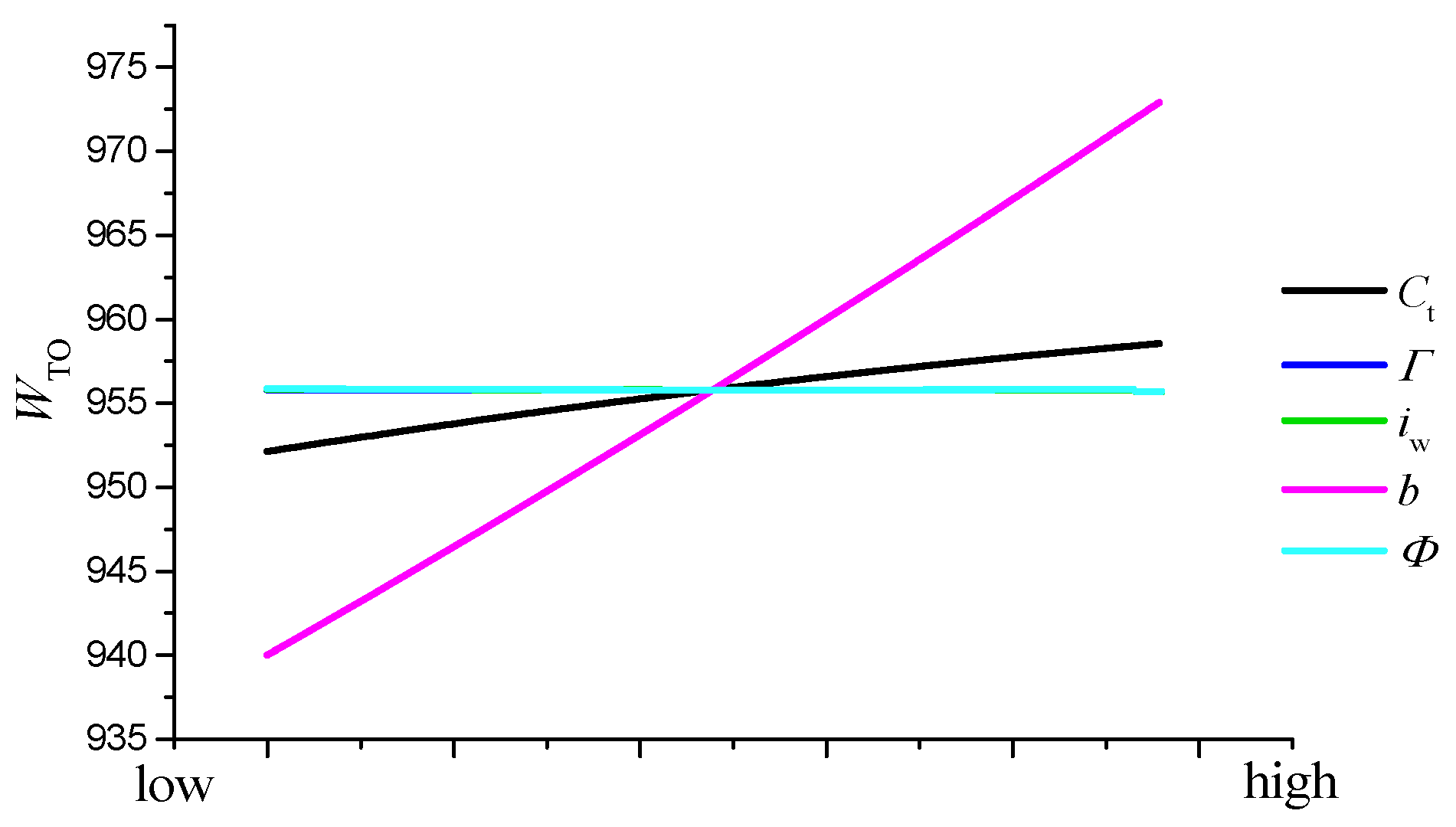
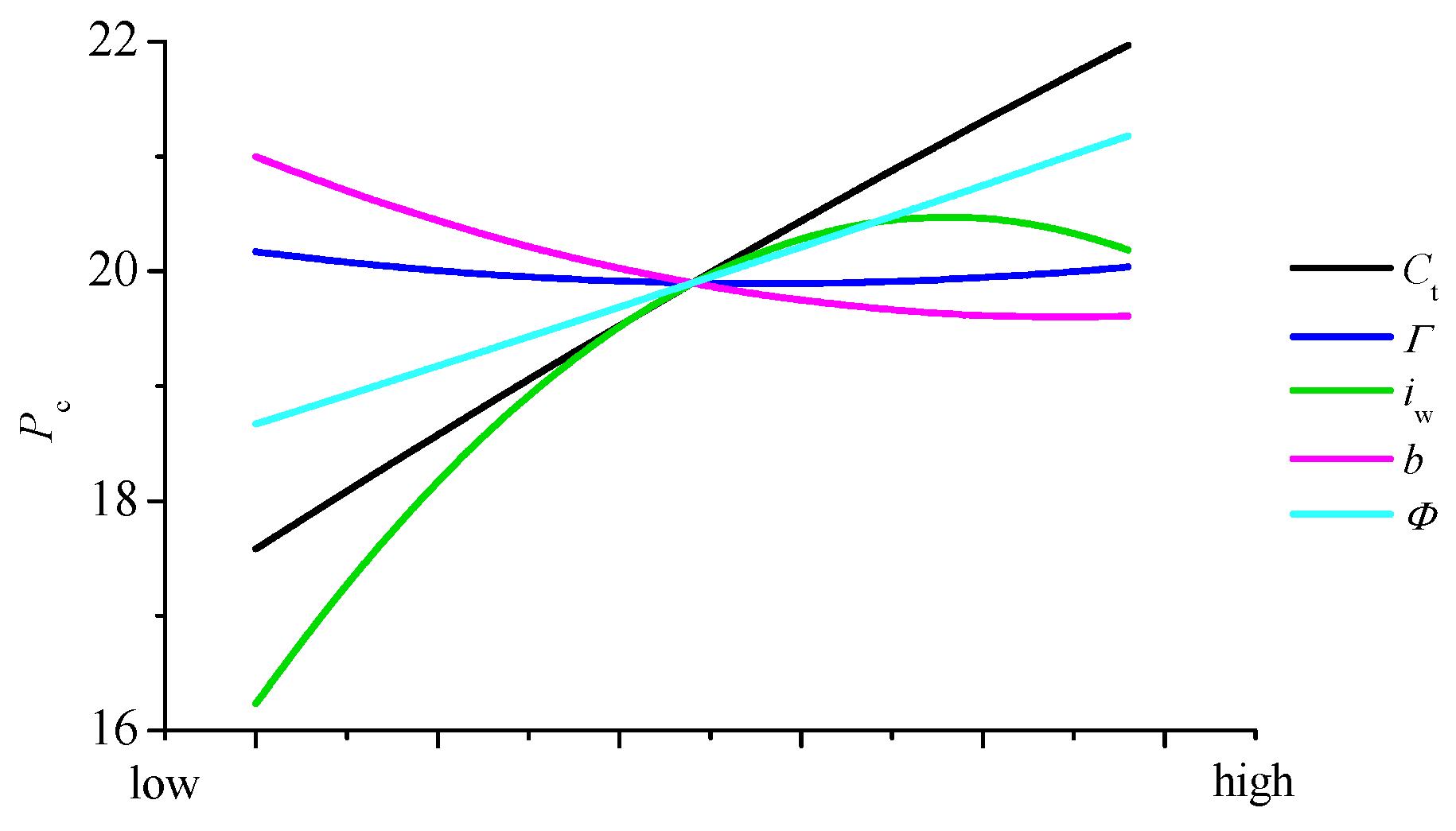
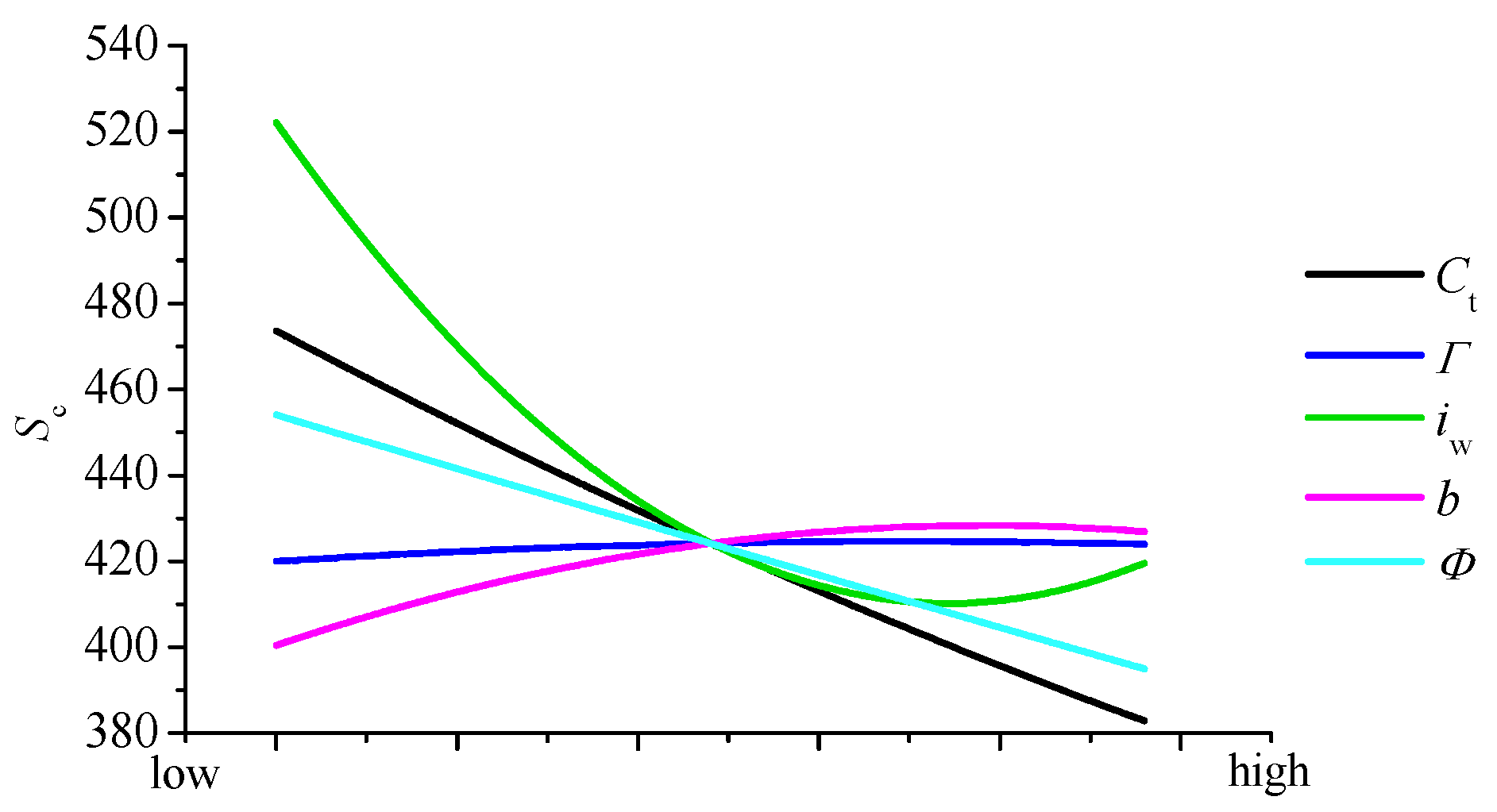
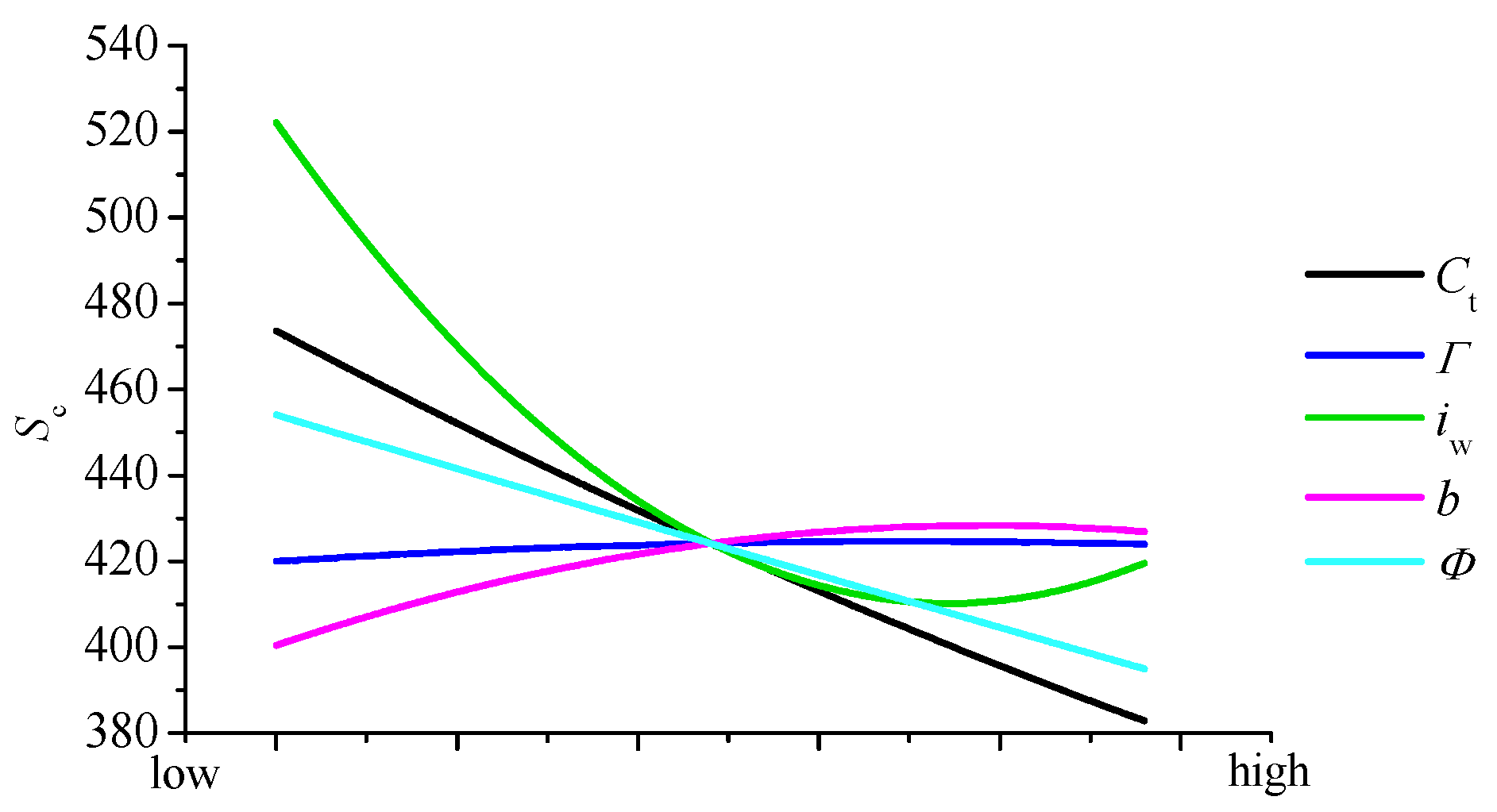
5.1. Influence of the Design Parameters of Wing on Flight Performances
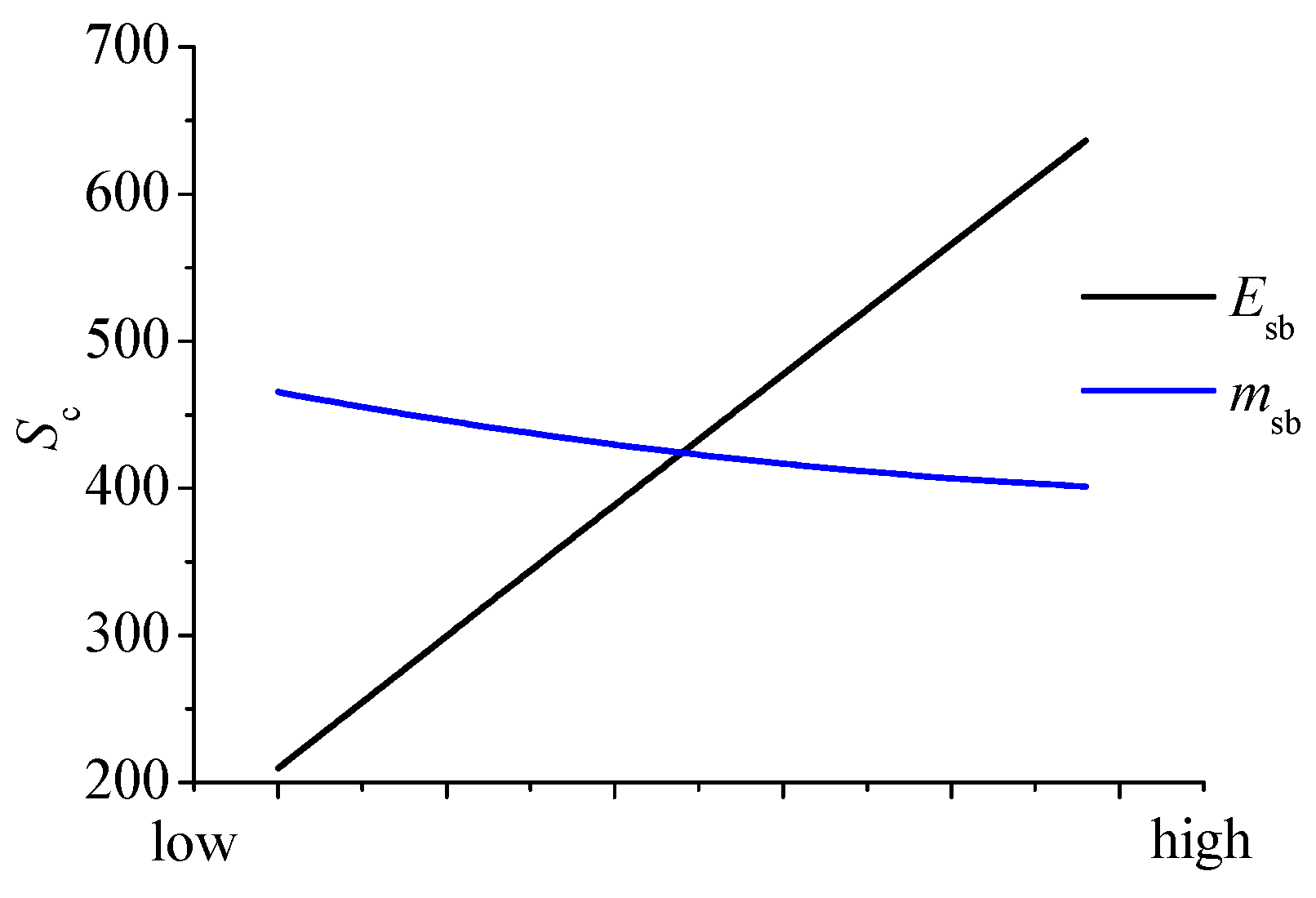
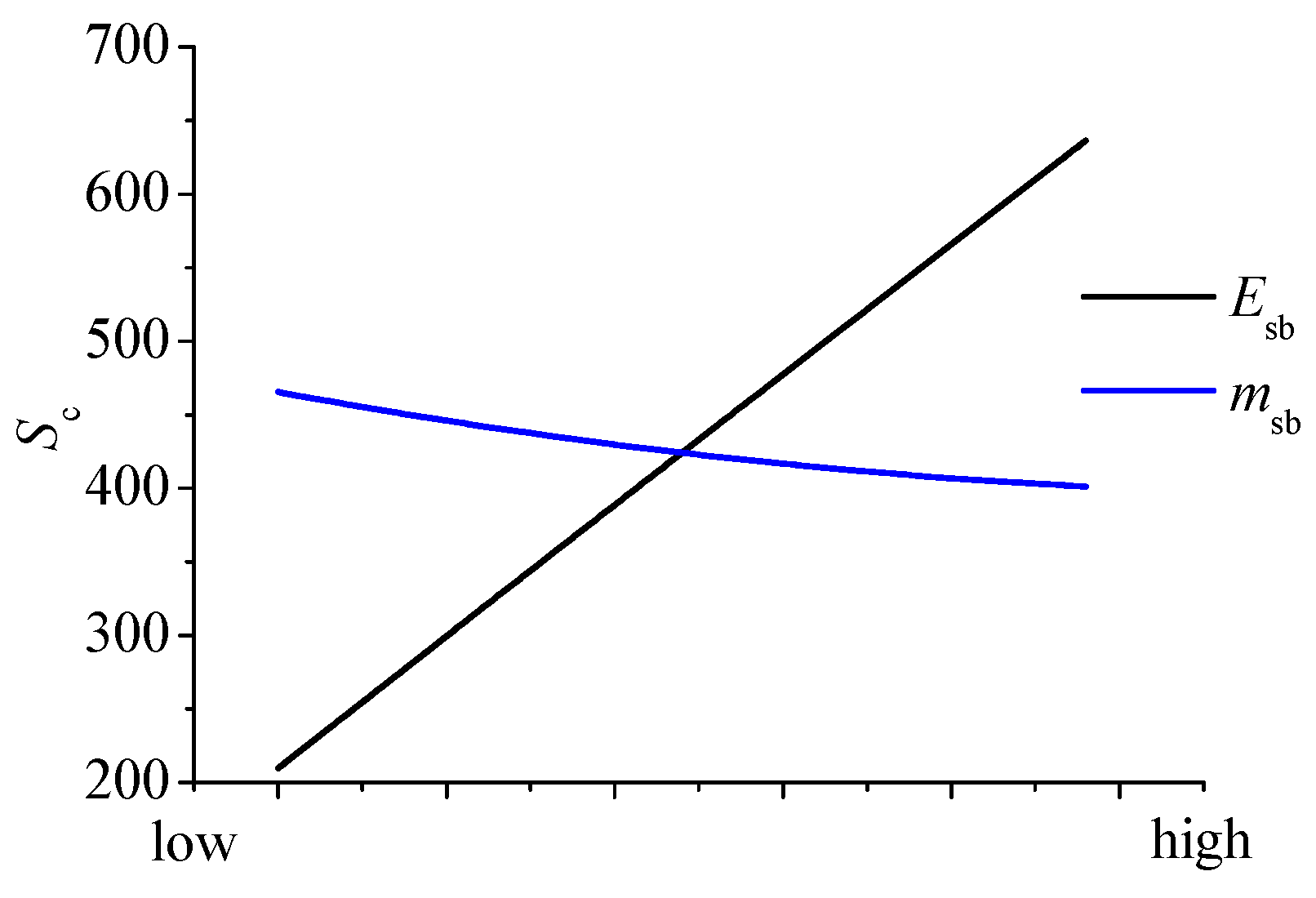
5.2. Effects of Battery Parameters on Range
5.3. Effects of Propeller Solidity on Hover Power
5.4. Multi-Parameter Sensitivity Analysis
5.5. Optimization of Key Design Parameters
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Moore, M. NASA Puffin Electric Tailsitter VTOL Concept. In Proceedings of the 10th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference, Fort Worth, TX, USA, 13–15 September 2010. [Google Scholar]
- Patterson, M.; German, B.; Moore, M. Performance Analysis and Design of On-Demand Electric Aircraft Concepts. In Proceedings of the AIAA ATIO Conference, Indianapolis, IN, USA, 17–19 September 2012. [Google Scholar]
- Moore, M.; Fredericks, W.J. Misconceptions of Electric Aircraft and their Emerging Aviation Markets. In Proceedings of the 52nd Aerospace Sciences Meeting (AIAA SciTech Forum), National Harbor, MD, USA, 13–17 January 2014. Report number: AIAA 2014-0535. [Google Scholar]
- Bacchini, A.; Cestino, E. Electric VTOL configurations comparison. Aerospace 2019, 6, 26. [Google Scholar] [CrossRef]
- Bacchini, A.; Cestino, E. Key aspects of electric vertical take-off and landing conceptual design. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2020, 234, 774–787. [Google Scholar] [CrossRef]
- Ma, T.; Wang, X.; Qiao, N.; Zhang, Z.; Fu, J.; Bao, M. A Conceptual Design and Optimization Approach for Distributed Electric Propulsion eVTOL Aircraft Based on Ducted-Fan Wing Unit. Aerospace 2022, 9, 690. [Google Scholar] [CrossRef]
- Kankanawadi, N.; Karinagshetru, G.; Patil, L.; Ultheru, B.; Baruch, J.; Nallusamy, T. Conceptual design of a fixed wing vertical take-off and landing unmanned aerial vehicle. In Proceedings of the AIP Conference Proceedings, Jamshedpur, India, 29–30 August 2020; AIP Publishing: New York, NY, USA, 2021; p. 2341. [Google Scholar]
- Palaia, G.; Abu Salem, K.; Cipolla, V.; Binante, V.; Zanetti, D. A Conceptual Design Methodology for e-VTOL Aircraft for Urban Air Mobility. Appl. Sci. 2021, 11, 10815. [Google Scholar] [CrossRef]
- Thu, Z.W.; Ahn, J.H.; Lee, J.L.; Kwon, D.Y.; Choi, Y.J.; Won, W.J.; Lee, J.W. Enhanced Performance Prediction of Hydrogen Fuel Cell Powered eVTOL UAV. In Proceedings of the AIAA AVIATION 2022 Forum, Chicago, IL, USA, 27 June–1 July 2022; p. 3382. [Google Scholar]
- Beyne, E.E.; Castro, S.G. Preliminary performance assessment of a long-range eVTOL aircraft. In Proceedings of the AIAA SCITECH 2022 Forum, San Diego, CA, USA, 3–7 January 2022; p. 1030. [Google Scholar]
- Schoser, J.; Cuadrat-Grzybowski, M.; Castro, S.G. Preliminary control and stability analysis of a long-range eVTOL aircraft. In Proceedings of the AIAA SCITECH 2022 Forum, San Diego, CA, USA, 3–7 January 2022; p. 1029. [Google Scholar]
- Dündar, Ö.; Bilici, M.; Ünler, T. Design and performance analyses of a fixed wing battery VTOL UAV. Eng. Sci. Technol. Int. J. 2020, 23, 1182–1193. [Google Scholar] [CrossRef]
- Xu, G.; Liu, L.; Zhang, X. Modeling and performance analysis for low altitude electric UAVs. In Proceedings of the 2016 International Conference on Civil, Transportation and Environment, Guangzhou, China, 30–31 January 2016; Atlantis Press: Amsterdam, The Netherlands, 2016; pp. 1058–1065. [Google Scholar]
- Traub, L.W. Range and Endurance Estimates for Battery-Powered Aircraft. J. Aircr. 2012, 48, 703–707. [Google Scholar] [CrossRef]
- Ugwueze, O.; Statheros, T.; Horri, N.; Innocente, M.; Bromfield, M. Investigation of a Mission-based Sizing Method for Electric VTOL Aircraft Preliminary Design. In Proceedings of the AIAA SCITECH 2022 Forum, San Diego, CA, USA, 3–7 January 2022. [Google Scholar]
- Ugwueze, O.; Statheros, T.; Horri, N.; Bromfield, M.A.; Simo, J. An Efficient and Robust Sizing Method for eVTOL Aircraft Configurations in Conceptual Design. Aerospace 2023, 10, 311. [Google Scholar] [CrossRef]
- Alba-Maestre, J.; Beyne, E.; Buszek, M.; Cuadrat-Grzybowski, M.; Montoya Santamaria, A.; Poliakov, N.; Prud’homme van Reine, K.; Salvador Lopez, N.; Schoser, J.; Wadia, K. Midterm Report—Multi-Disciplinary Design and Optimisation of a Long-Range eVTOL Aircraft; Technical Report; Delft University of Technology: Delft, The Netherlands, 2021. [Google Scholar] [CrossRef]
- Wang, Z.; Wei, P.; Sun, L. Optimal cruise, descent, and landing of eVTOL vehicles for urban air mobility using convex optimization. In Proceedings of the AIAA Scitech 2021 Forum, Virtual, 1–15 & 19–21 January 2021; p. 0577. [Google Scholar]
- Palaia, G.; Zanetti, D.; Salem, K.A.; Cipolla, V.; Binante, V. THEA-CODE: A design tool for the conceptual design of hybrid-electric aircraft with conventional or unconventional airframe configurations. Mech. Ind. 2021, 22, 19. [Google Scholar] [CrossRef]
- Kadhiresan, A.R.; Duffy, M.J. Conceptual design and mission analysis for eVTOL urban air mobility flight vehicle configurations. In Proceedings of the AIAA Aviation 2019 forum, Dallas, TX, USA, 17–21 June 2019; p. 2873. [Google Scholar]
- Hascaryo, R.W.; Merret, J.M. Configuration-independent initial sizing method for UAM/eVTOL vehicles. In Proceedings of the AIAA Aviation 2020 Forum, Virtual, 15–19 June 2020; p. 2630. [Google Scholar]
- Tyan, M.; Van Nguyen, N.; Kim, S.; Lee, J.W. Comprehensive preliminary sizing/resizing method for a fixed wing–VTOL electric UAV. Aerosp. Sci. Technol. 2017, 71, 30–41. [Google Scholar] [CrossRef]
- Lee, B.S.; Tullu, A.; Hwang, H.Y. Optimal design and design parameter sensitivity analyses of an eVTOL PAV in the conceptual design phase. Appl. Sci. 2020, 10, 5112. [Google Scholar] [CrossRef]
- McDonald, R.A.; Gloudemans, J.R. Open vehicle sketch pad: An open source parametric geometry and analysis tool for conceptual aircraft design. In Proceedings of the AIAA SciTech 2022 Forum, San Diego, CA, USA, 3–7 January 2022; p. 0004. [Google Scholar]
- Gudmundsson, S. General Aviation Aircraft Design: Applied Methods and Procedures; Butterworth Heinemann: Oxford, UK, 2013. [Google Scholar]
- Bacchini, A. Electric VTOL Preliminary Design and Wind Tunnel Tests. Ph.D. Thesis, Politecnico di Torino, Turin, Italy, 2020. [Google Scholar]
- Seddon, J.M.; Newman, S. Basic Helicopter Aerodynamics; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2011. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Lower | Initial | Upper |
|---|---|---|---|
| Wing incidence angle iw/(°) | 0 | 2 | 5 |
| Wing twist Φ/(°) | −4 | 0 | 4 |
| Wing dihedral Γ/(°) | 0 | 4 | 5 |
| Wing half-span b/m | 4 | 4.85 | 6.2 |
| Wingtip chord length Ct/m | 0.45 | 1.0 | 1.5 |
| Battery weight mb/kg | 200 | 223 | 300 |
| Battery-specific energy Esb/(Wh/kg) | 200 | 276 | 500 |
| Single blade area Sb/m2 | 0.05 | 0.0804 | 0.1 |
| Flight Phase | Energy Ratio | Flight Phase | Energy Ratio |
|---|---|---|---|
| Vertical takeoff | 1.5% | Decelerated descent | 1.3% |
| Transition | 2% | Transition | 2.6% |
| Accelerated climb | 2.7% | Vertical landing | 1.5% |
| Cruise | 88% |
| Parameters | Lower | Initial | Optimized | Upper |
|---|---|---|---|---|
| Wing incidence angle iw/(°) | 0 | 2.0 | 0.0 | 5.0 |
| Wing twist Φ/(°) | −2.0 | 0.0 | −2.0 | 2.0 |
| Wing half-span b/m | 4.0 | 4.85 | 4.6 | 6.2 |
| Wingtip chord length Ct/m | 0.45 | 1.0 | 0.45 | 1.5 |
| Battery weight mb/kg | 200.0 | 250.0 | 224.2 | 250.0 |
| maximum takeoff weight Wto/kg | -- | 934.3 | 899.7 | 900.0 |
| Range Sc/km | -- | 303.3 | 350.7 | -- |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Ma, W.; Chen, Z. Sensitivity Analysis for Design Parameters of Electric Tilt-Rotor Aircraft. Aerospace 2024, 11, 322. https://doi.org/10.3390/aerospace11040322
Wang Y, Ma W, Chen Z. Sensitivity Analysis for Design Parameters of Electric Tilt-Rotor Aircraft. Aerospace. 2024; 11(4):322. https://doi.org/10.3390/aerospace11040322
Chicago/Turabian StyleWang, Yu, Wenyuan Ma, and Zhaolin Chen. 2024. "Sensitivity Analysis for Design Parameters of Electric Tilt-Rotor Aircraft" Aerospace 11, no. 4: 322. https://doi.org/10.3390/aerospace11040322
APA StyleWang, Y., Ma, W., & Chen, Z. (2024). Sensitivity Analysis for Design Parameters of Electric Tilt-Rotor Aircraft. Aerospace, 11(4), 322. https://doi.org/10.3390/aerospace11040322