
Preliminary Design and Optimization of Primary Structures for a Tilt-Duct UAV





Abstract
1. Introduction
2. Materials and Methods
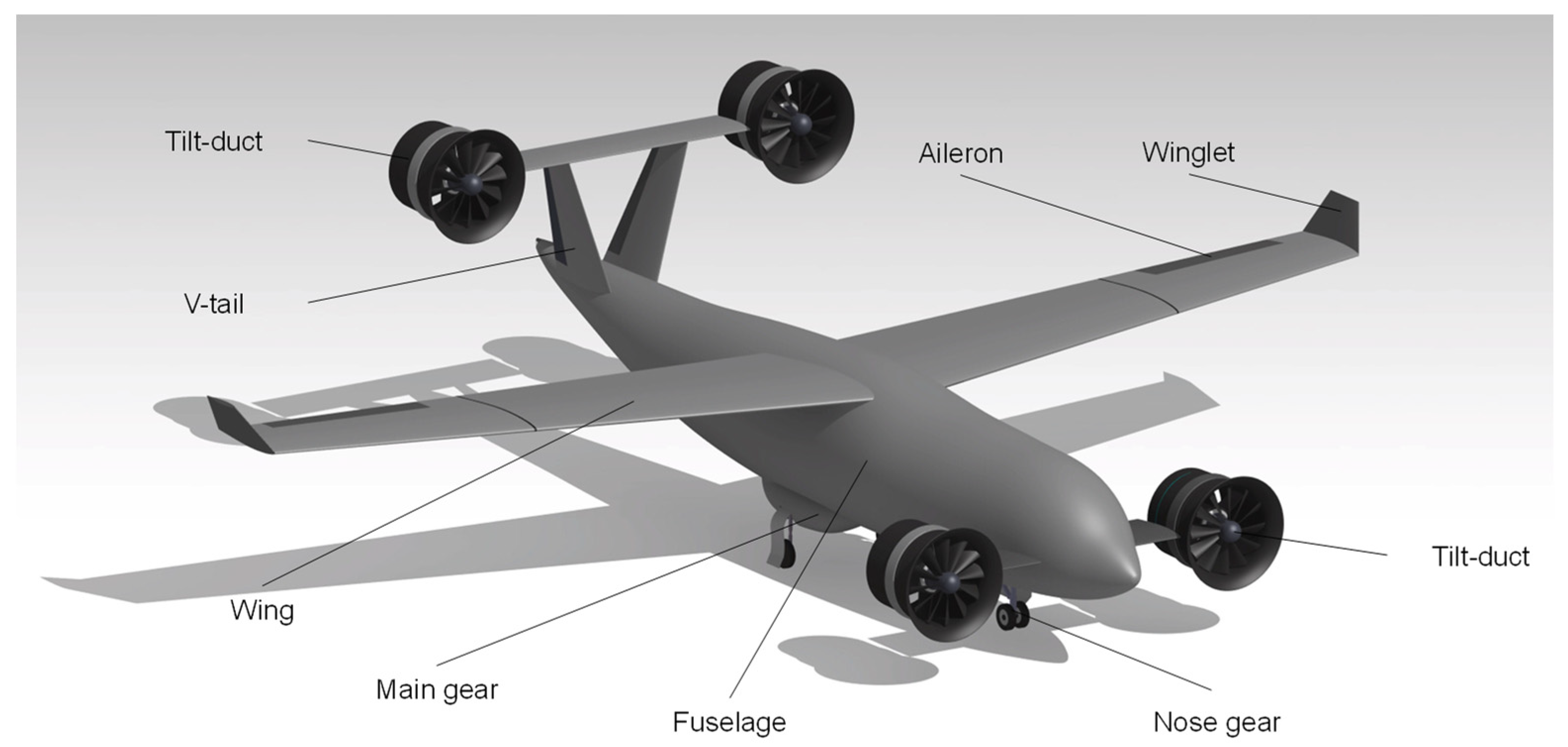
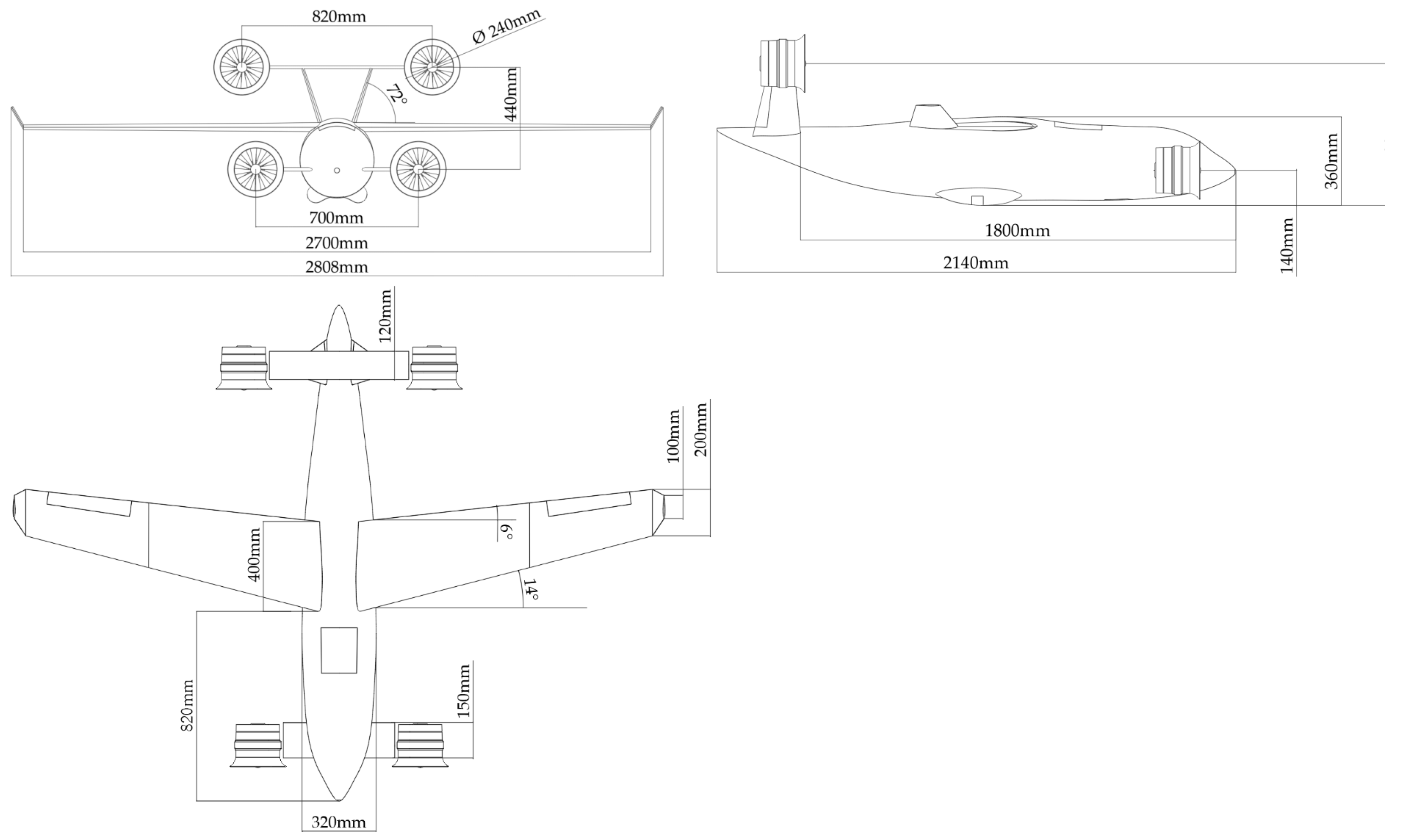
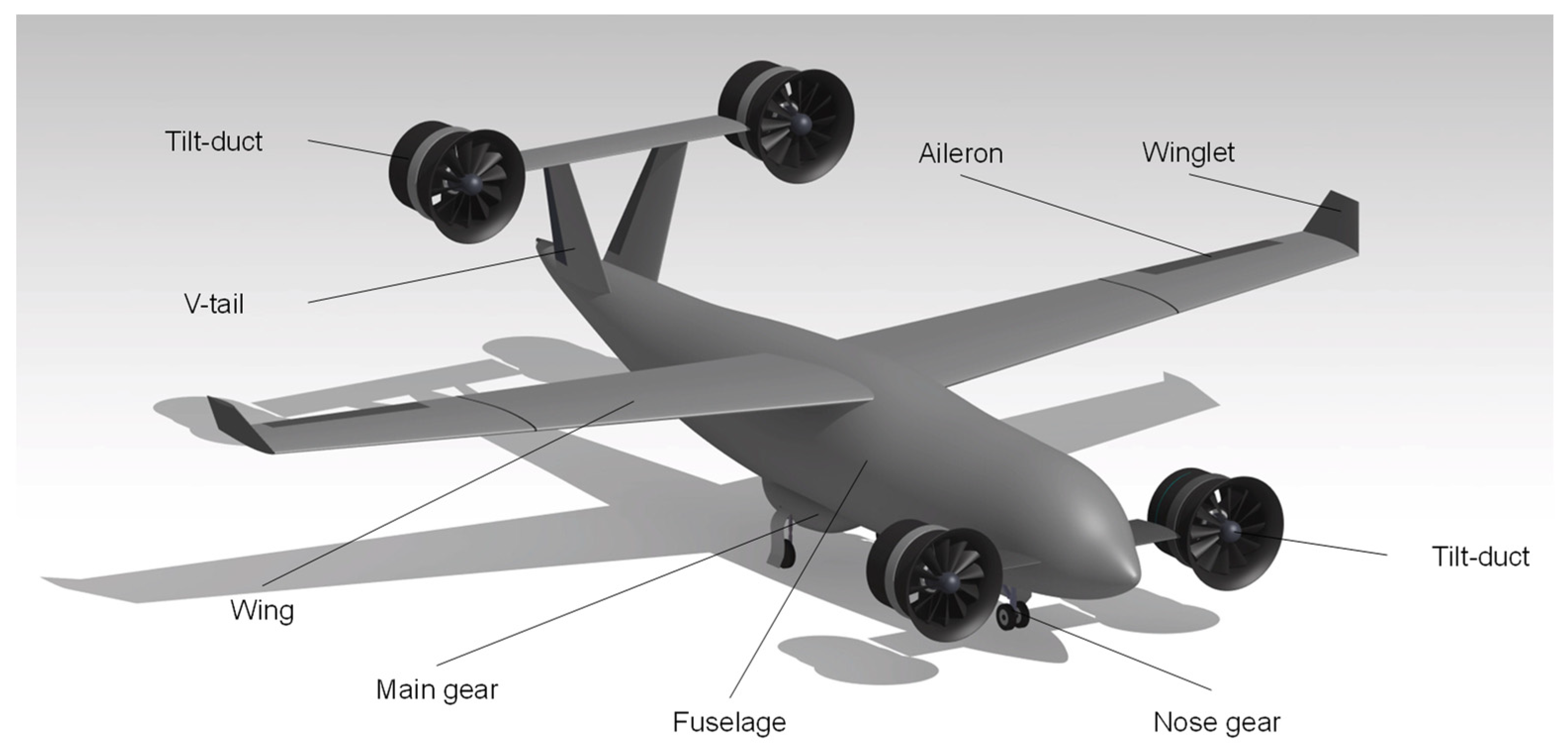
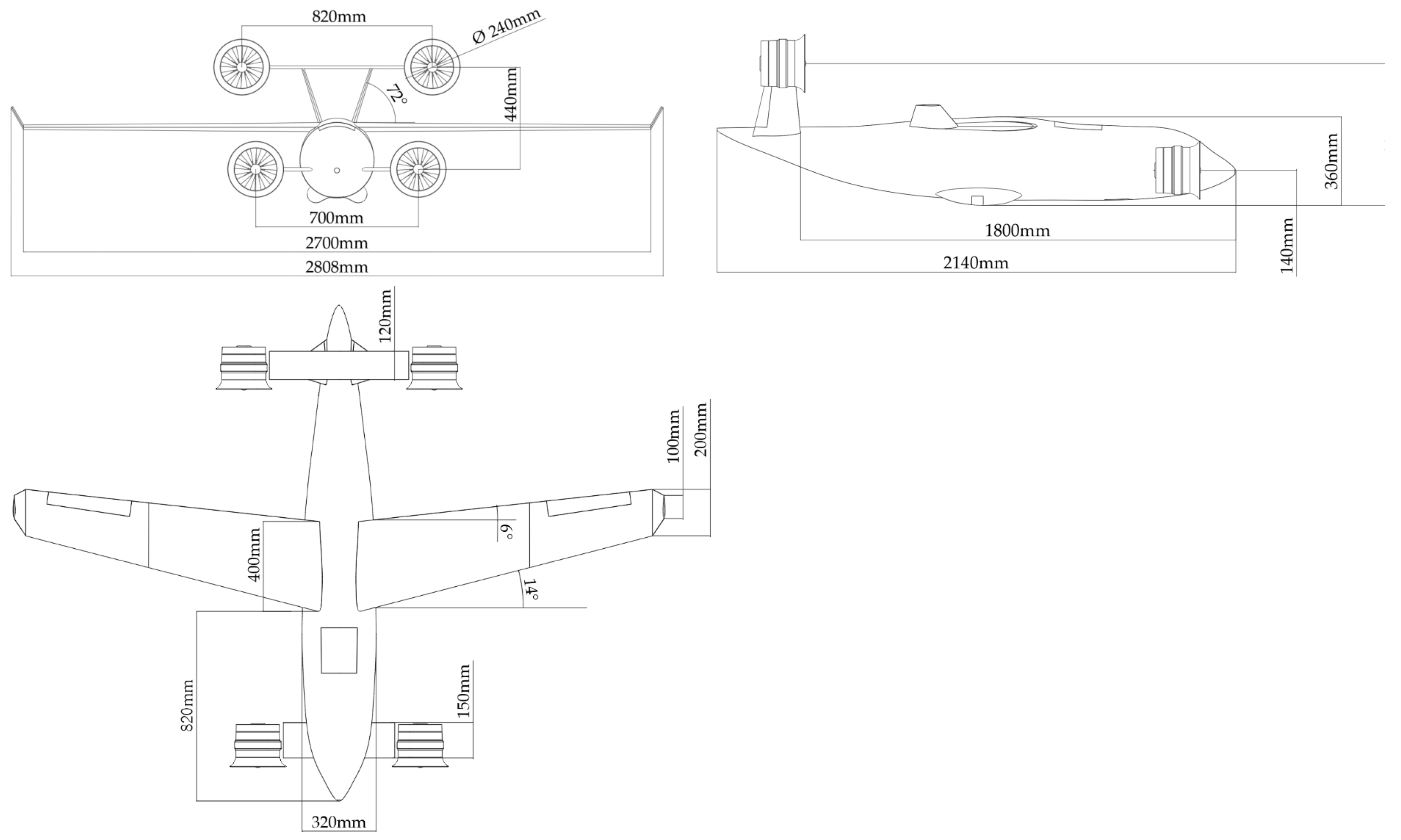
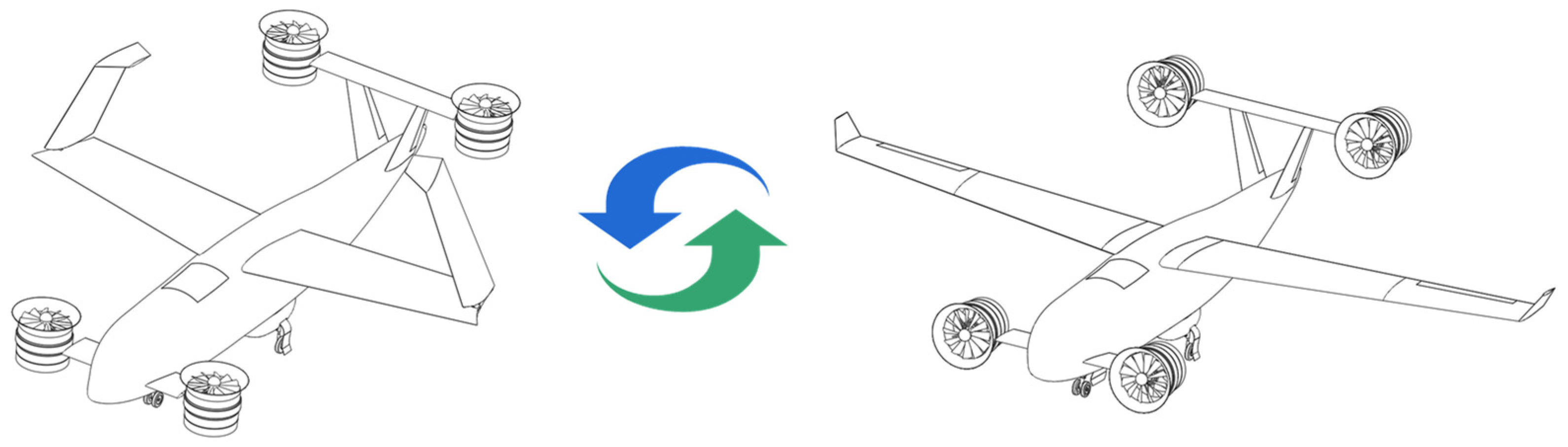
2.1. Reference Tilt-Duct UAV
2.2. Aircraft Structure Design
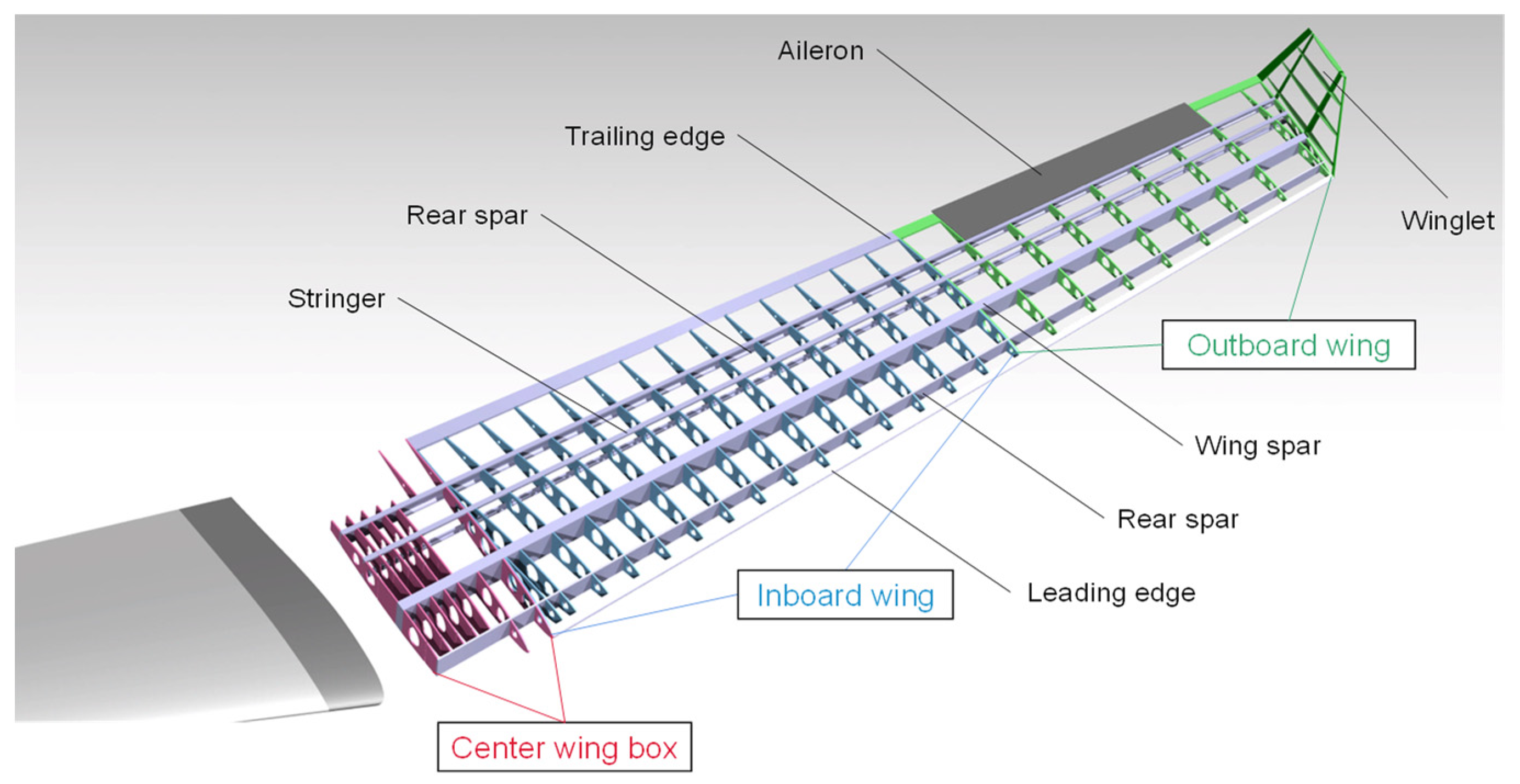
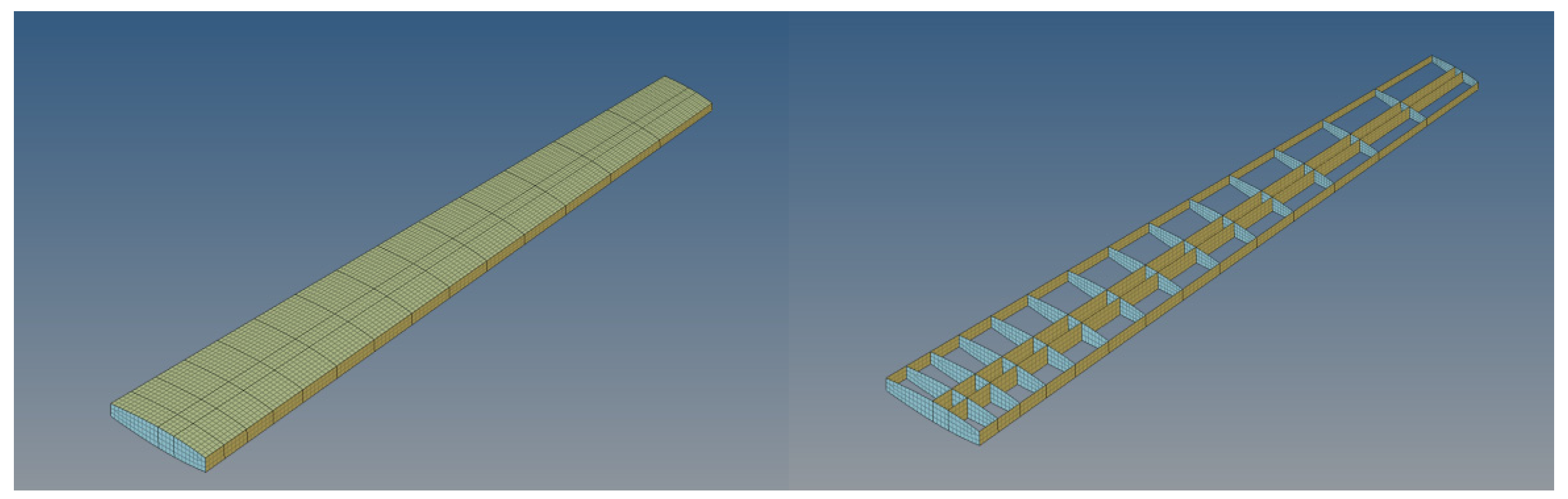
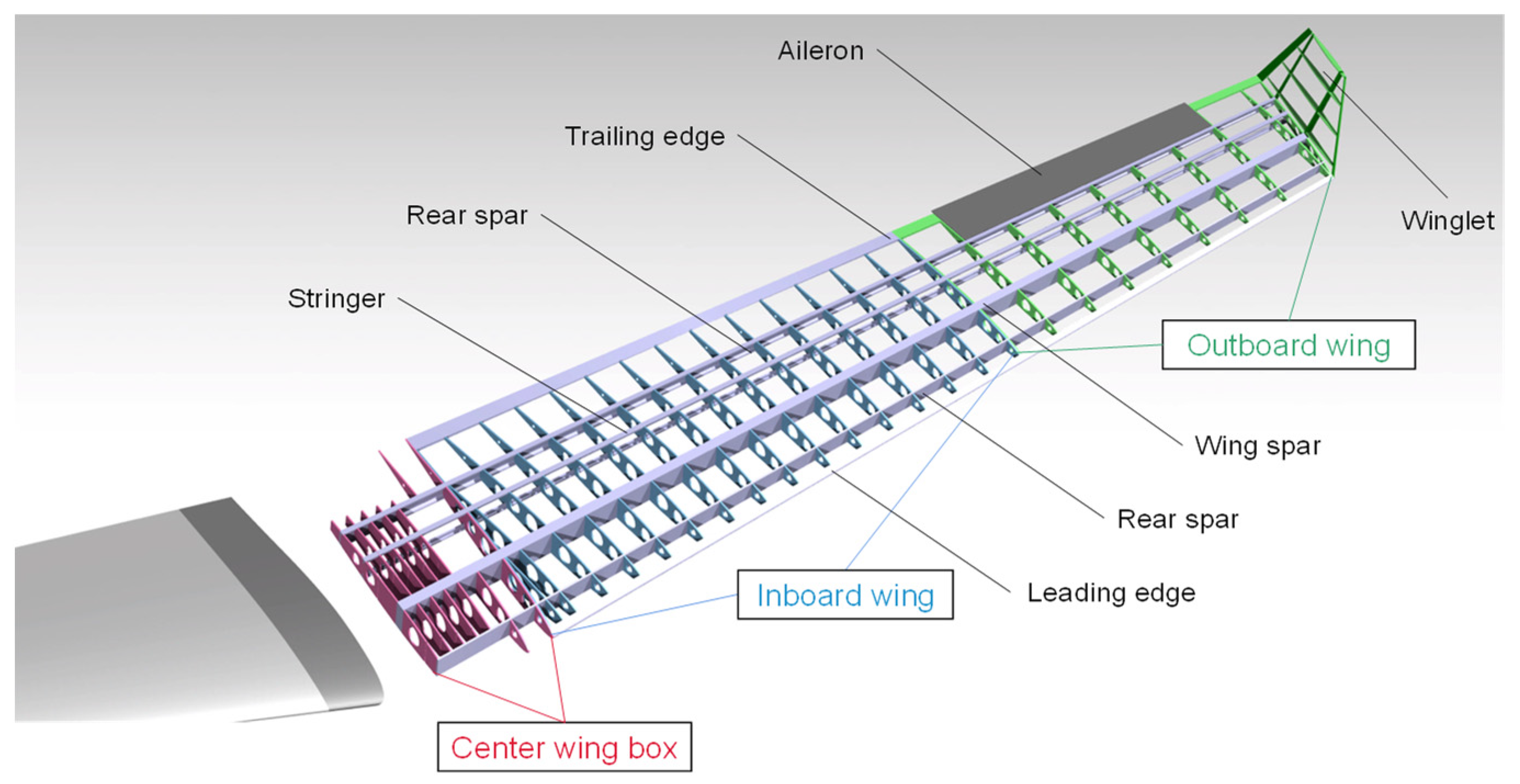
2.2.1. Wing Structure
- Wing area 0.756 m2;
- Wing leading edge sweep angle 14°;
- Wing taper ratio 0.5;
- Wing aspect ratio 10.5.
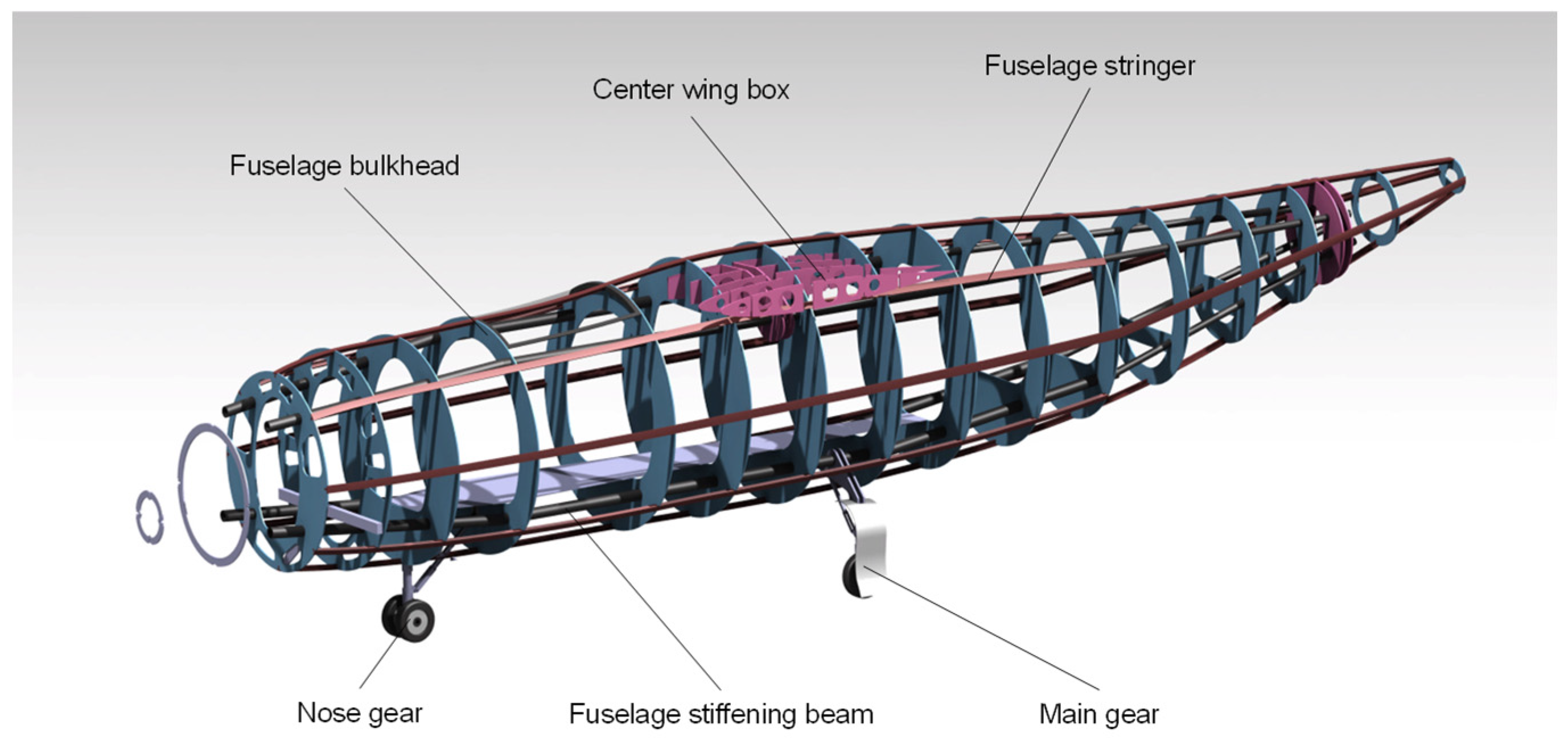
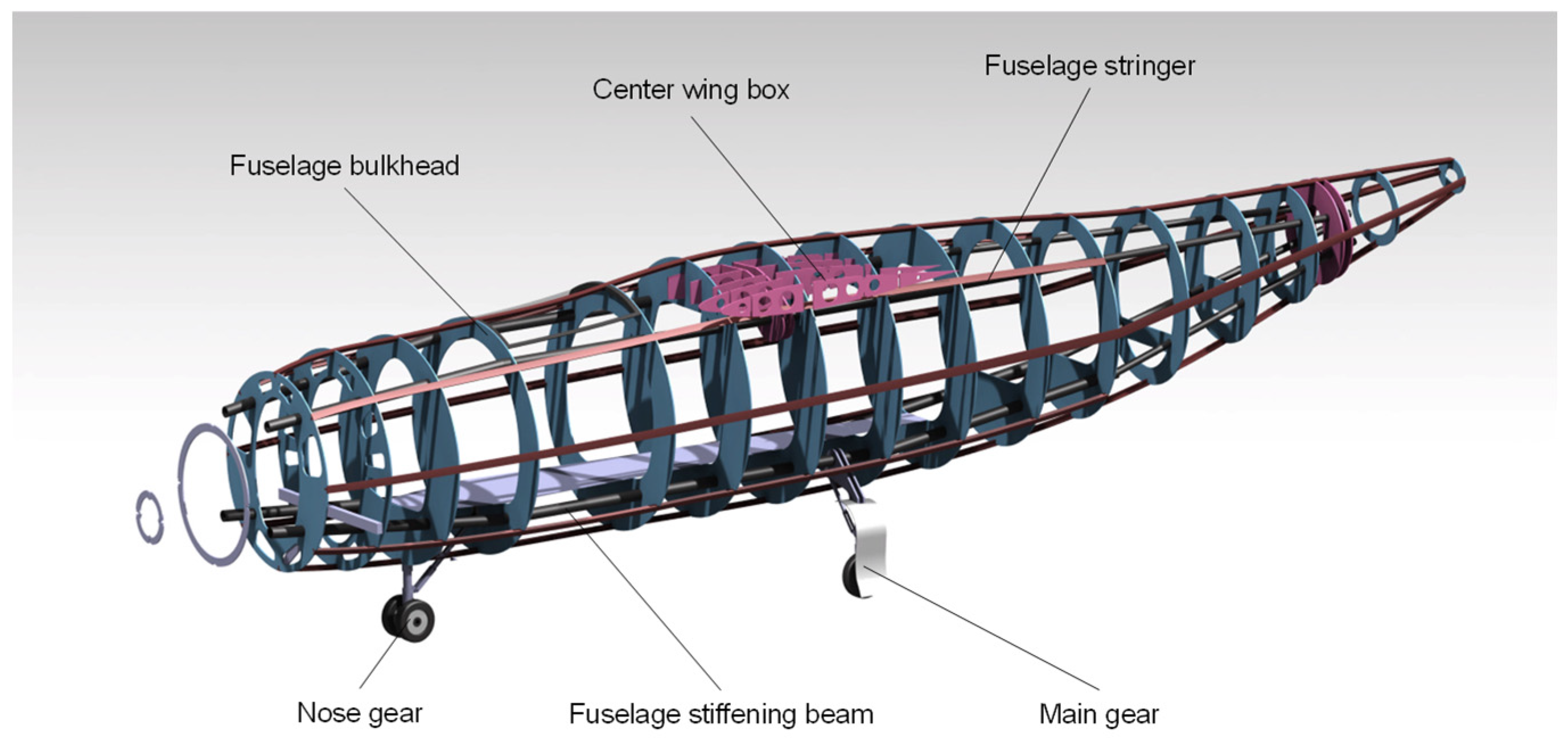
2.2.2. Fuselage Structure
- Fuselage length 2.14 m;
- Fuselage width 0.318 m;
- Fuselage height 0.365 m.
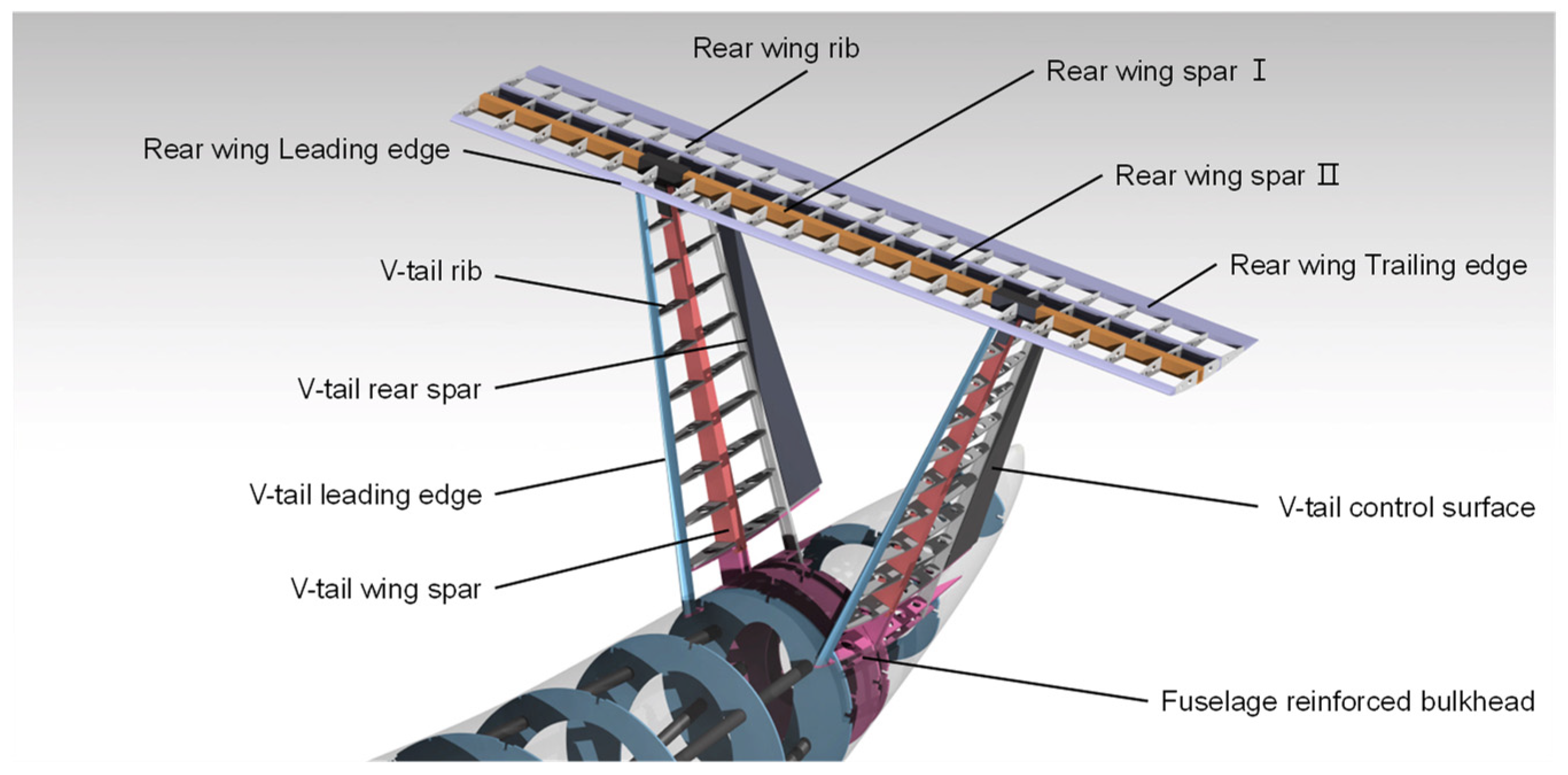
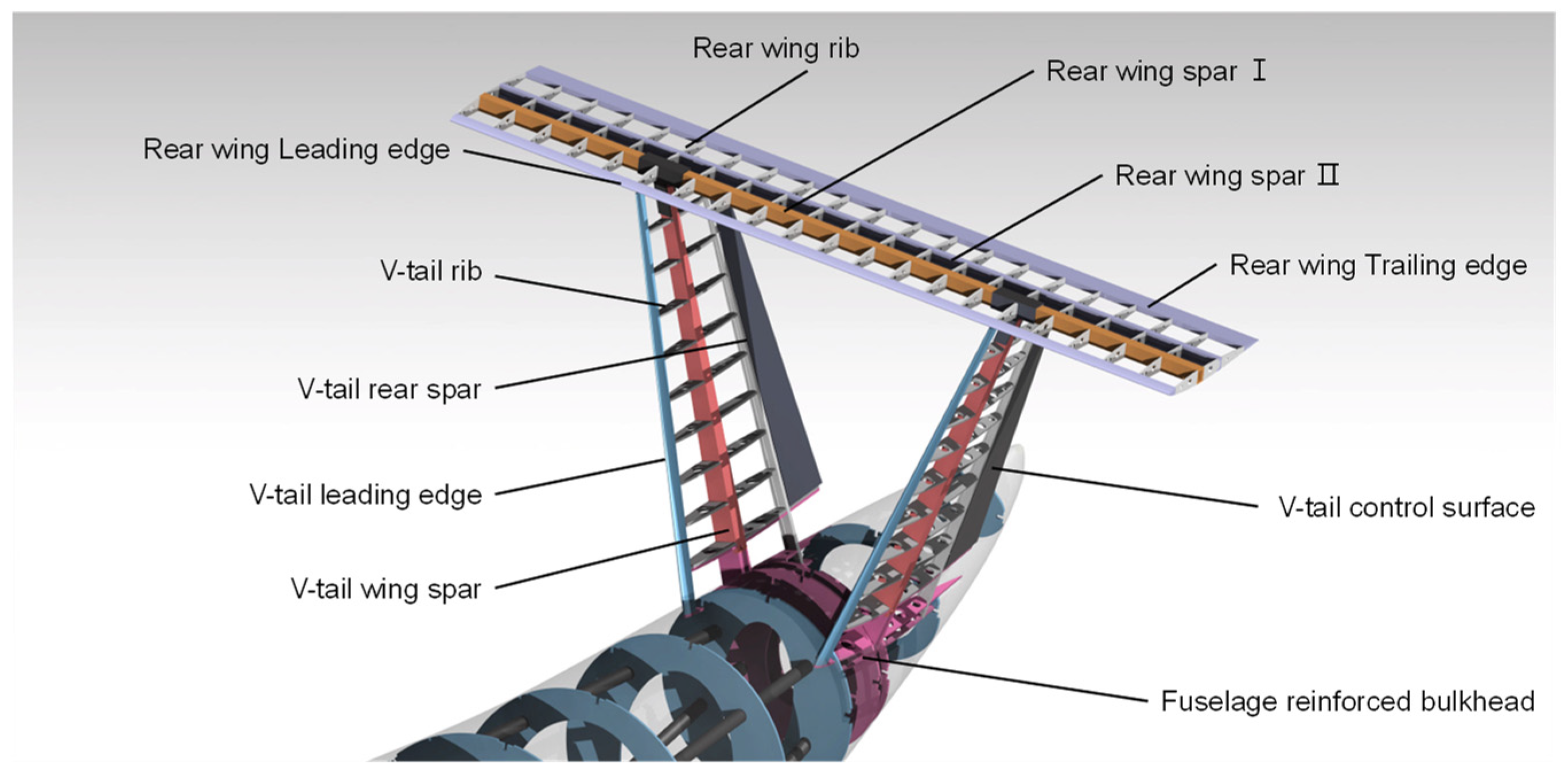
2.2.3. Empennage Structure
- Tail area 0.046 m2;
- Tail leading edge sweep angle 5.7°;
- Tail taper ratio 0.5;
- Tail aspect ratio 2.2.
3. Results
3.1. Aircraft Structure Analysis Results
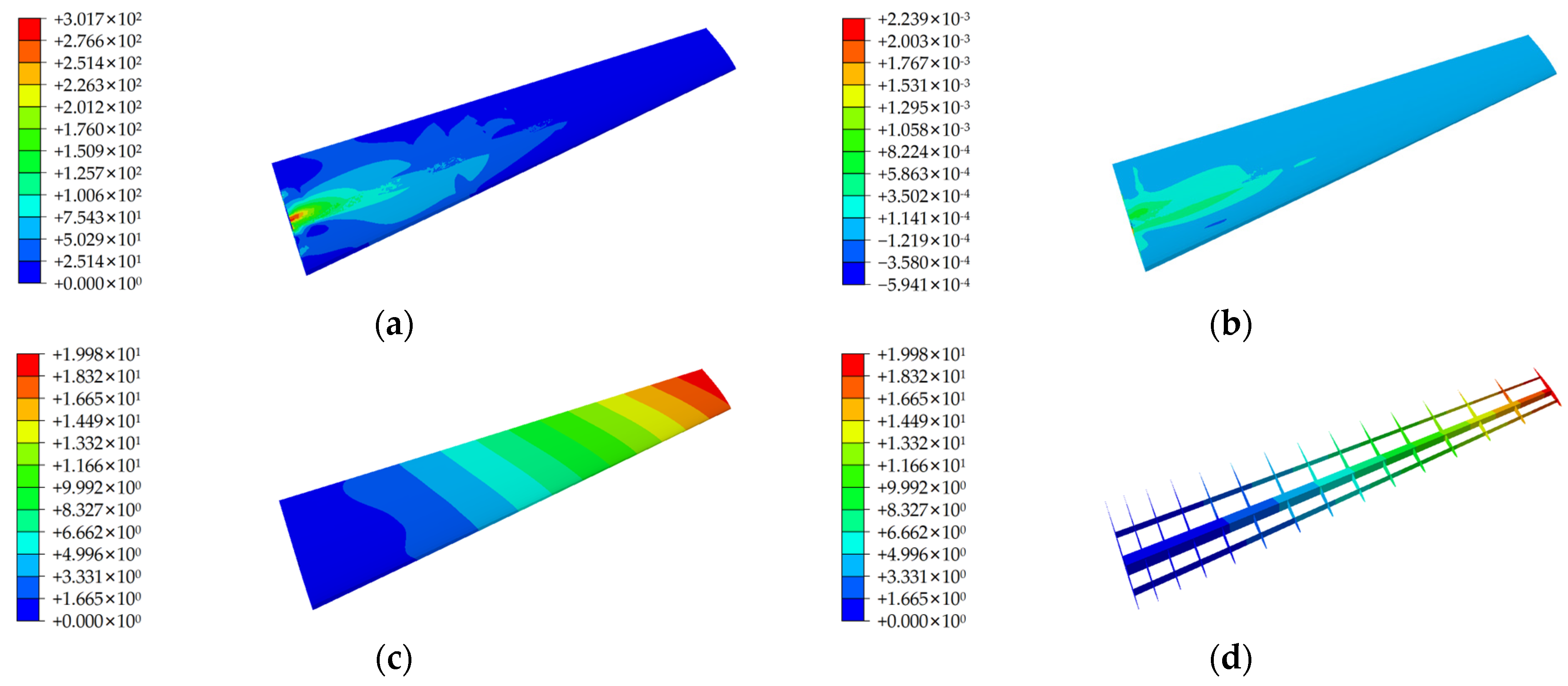
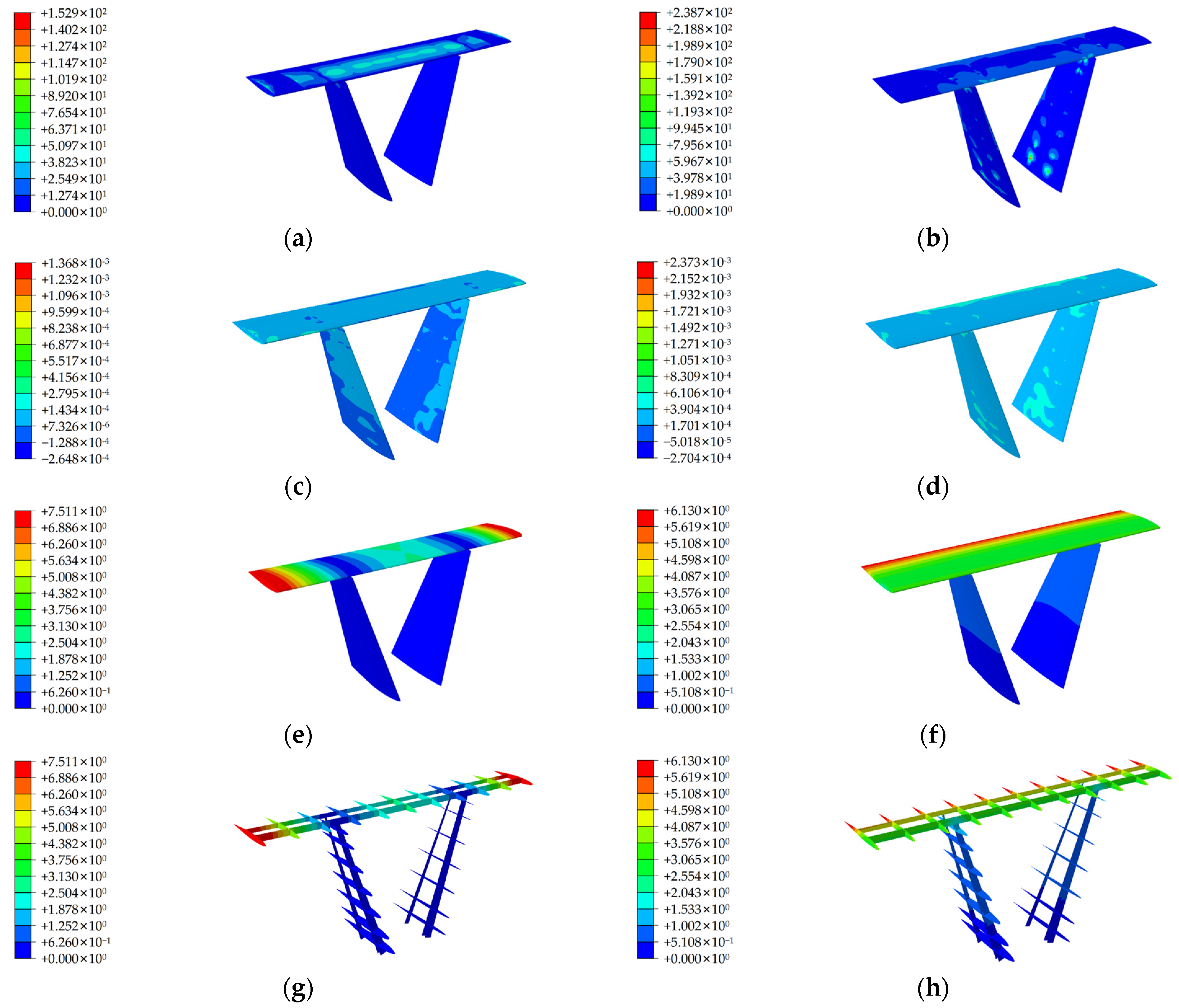
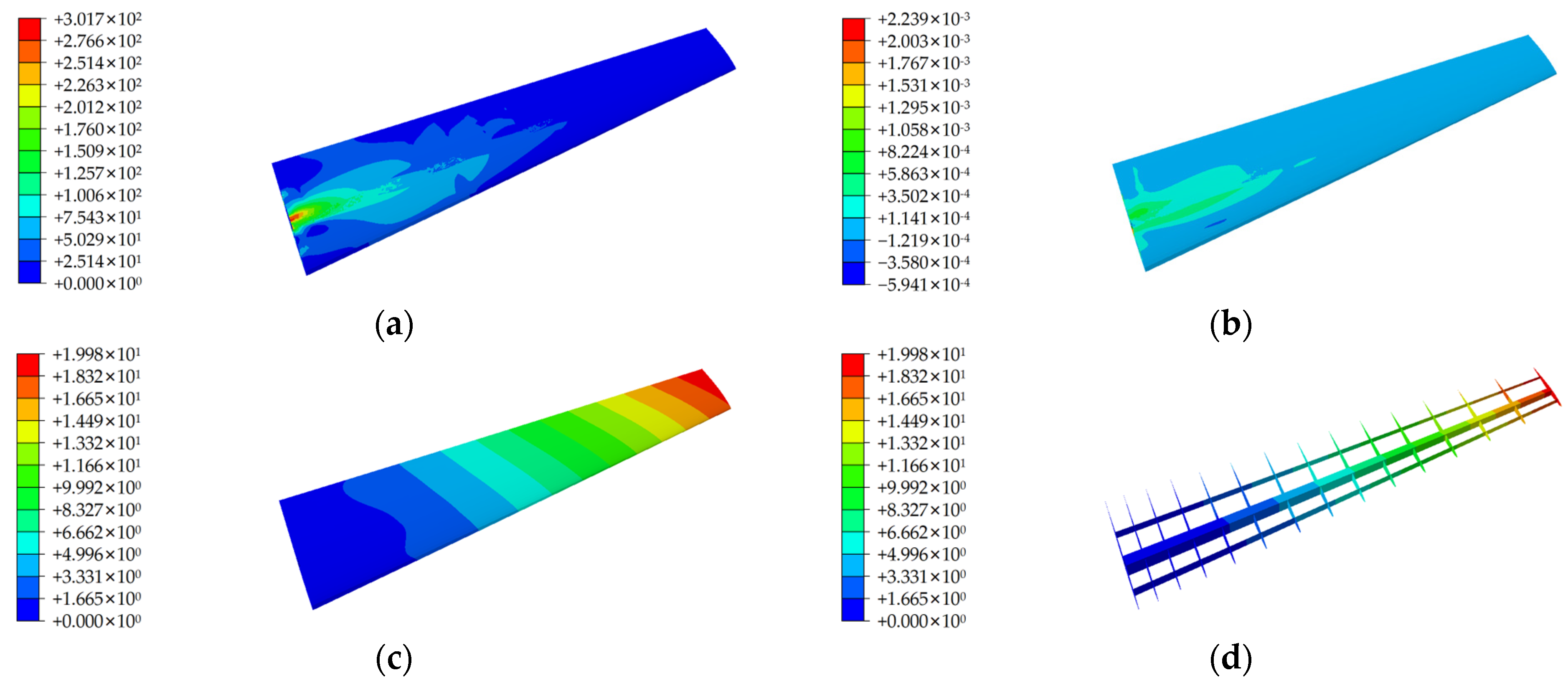
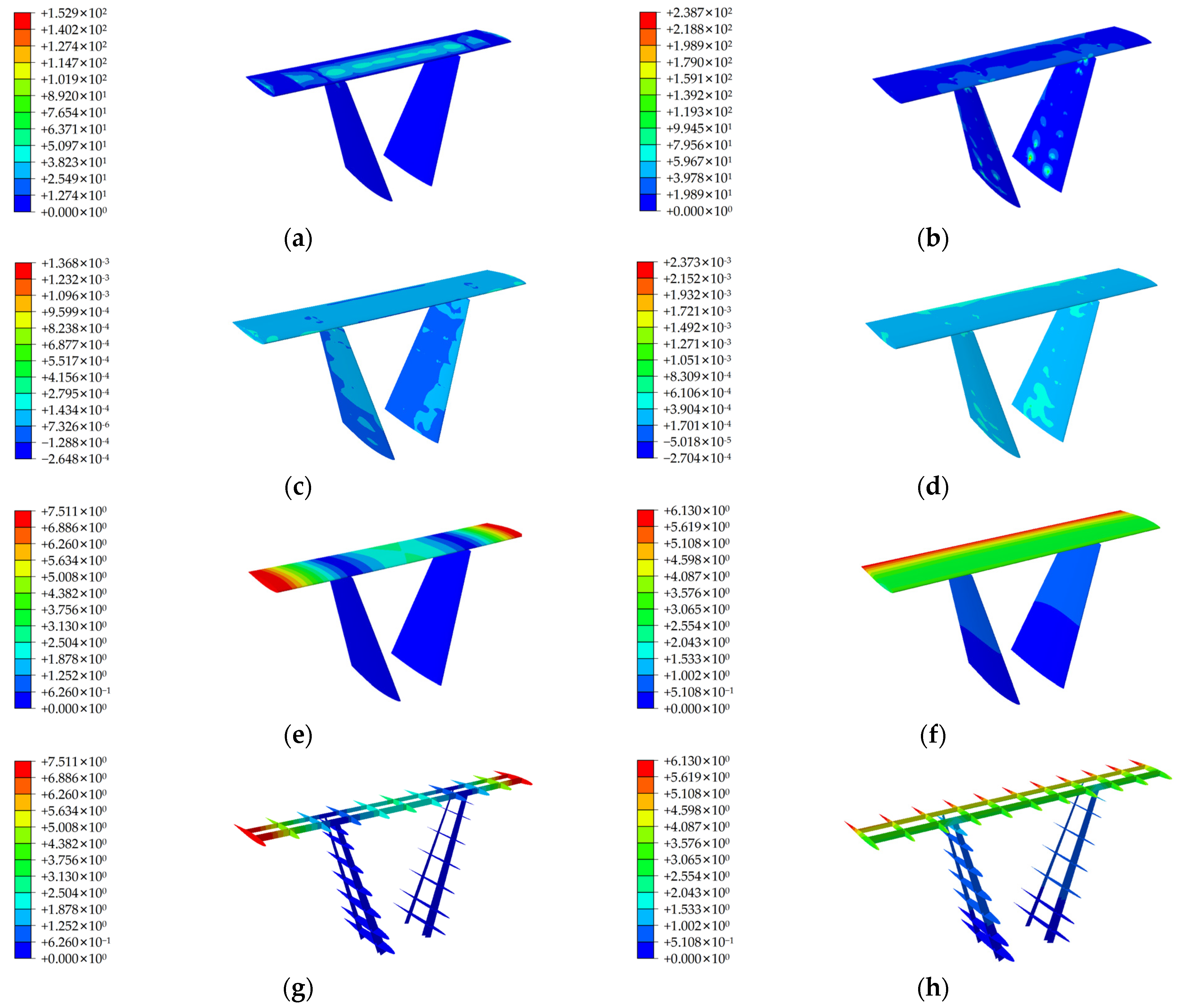
3.1.1. Wing Structure Analysis
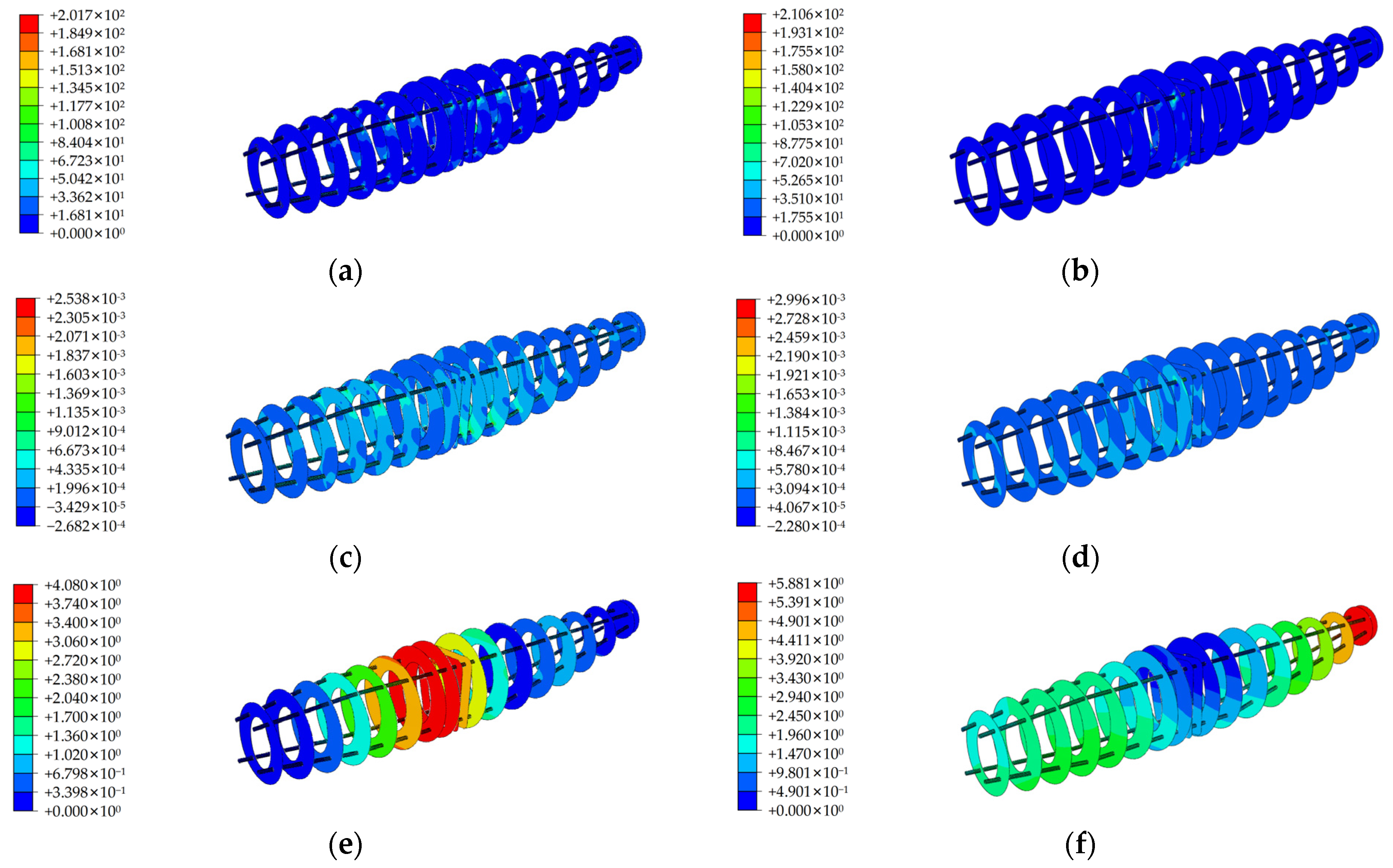
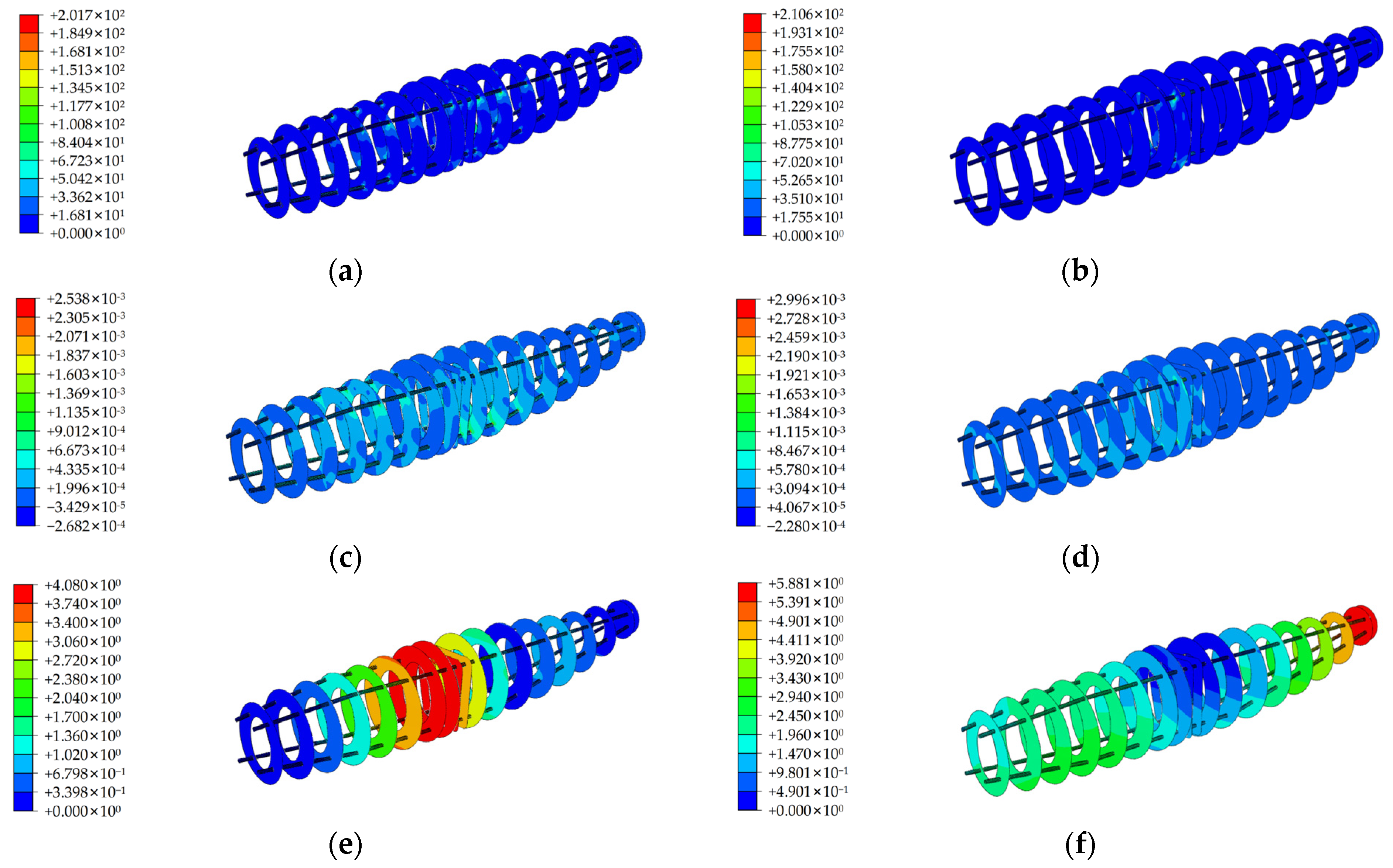
3.1.2. Fuselage structure analysis
3.1.3. Empennage Structure Analysis
3.2. Wing Structure Optimization Results
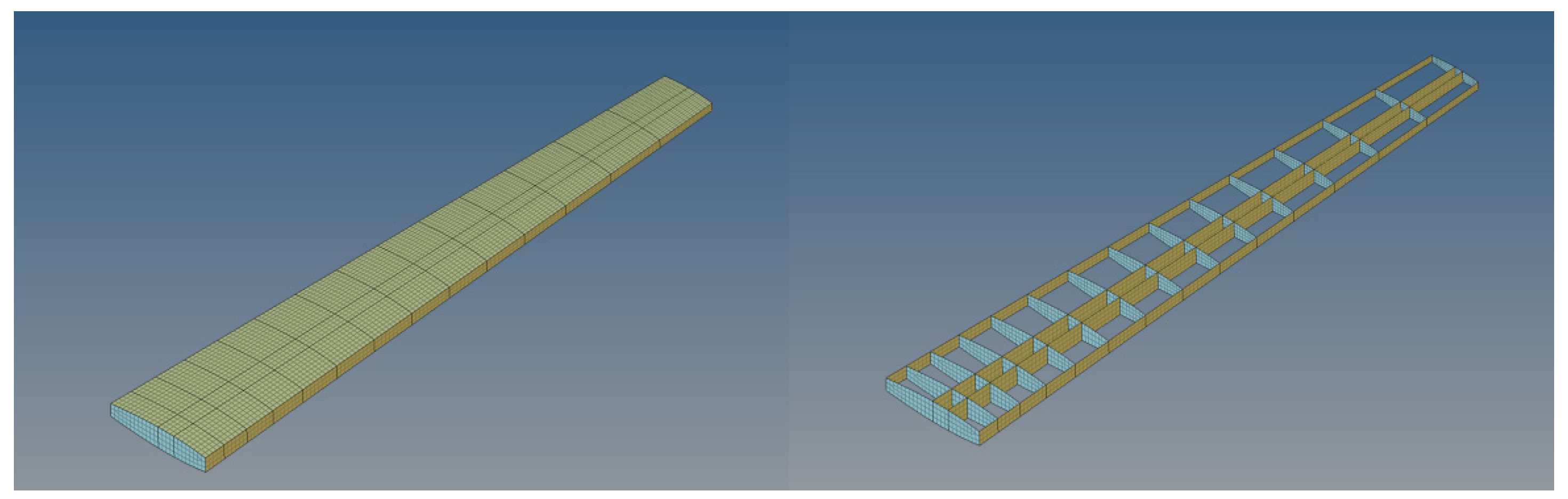
3.2.1. Finite Element Modelling
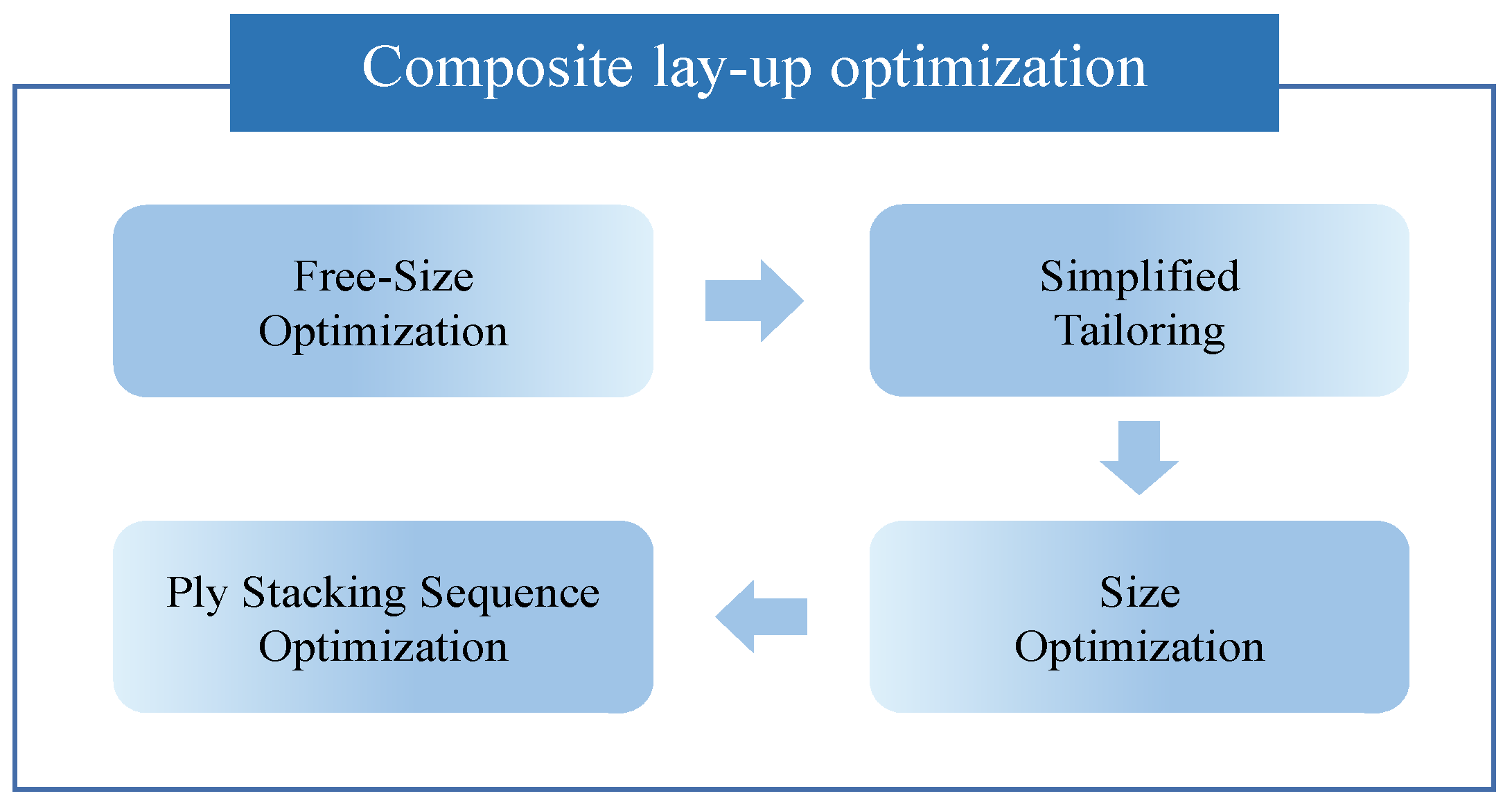
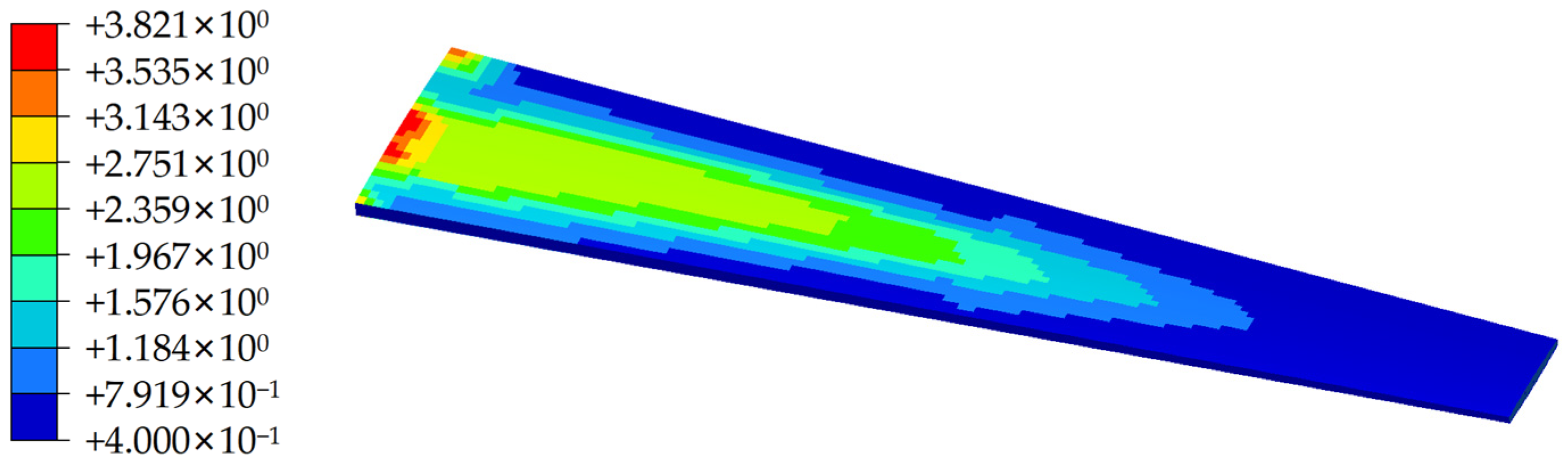
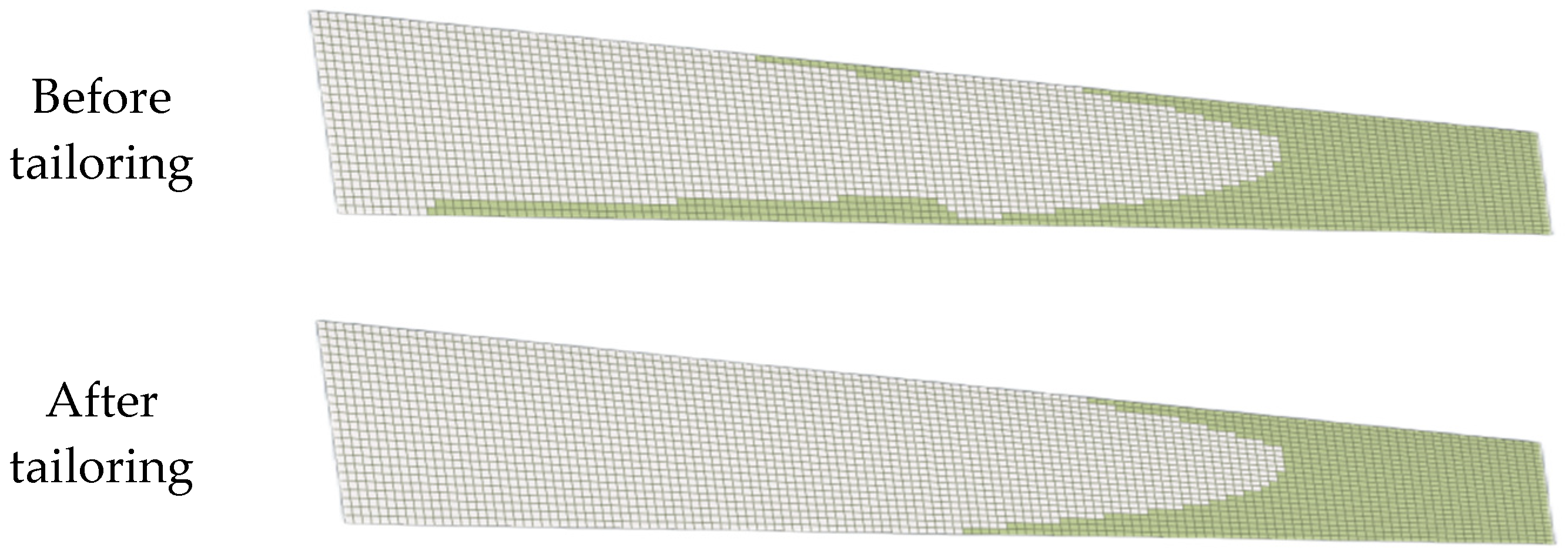
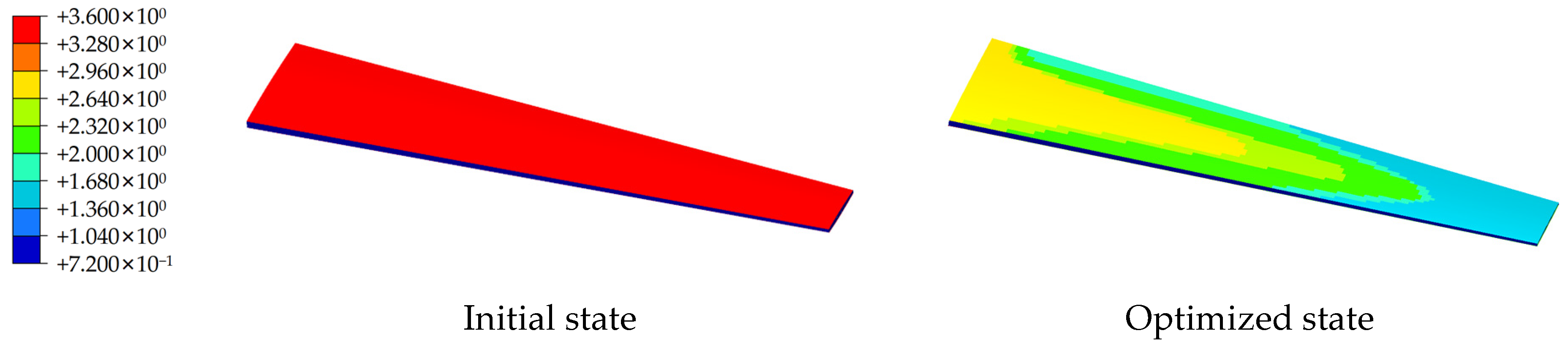
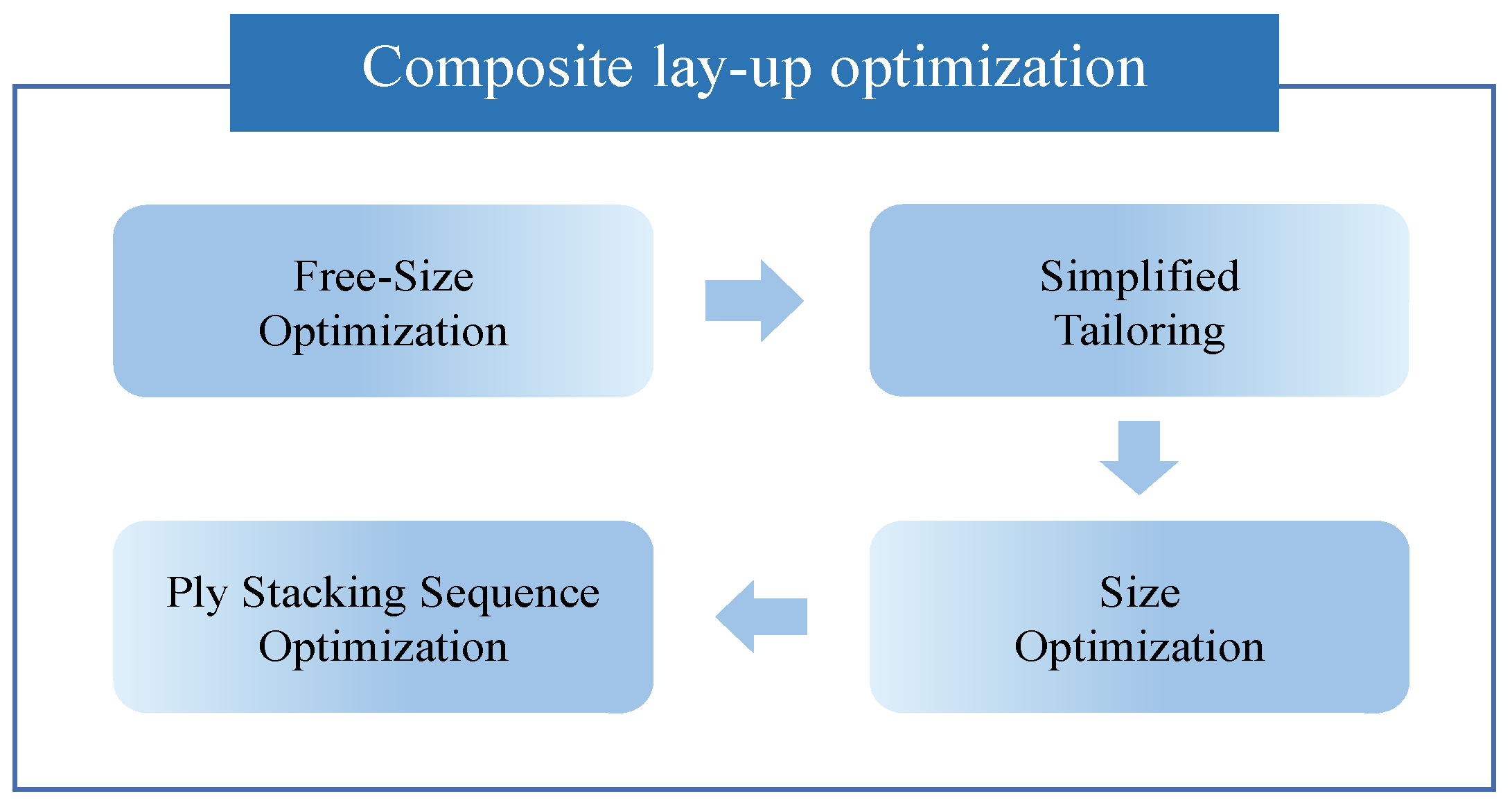
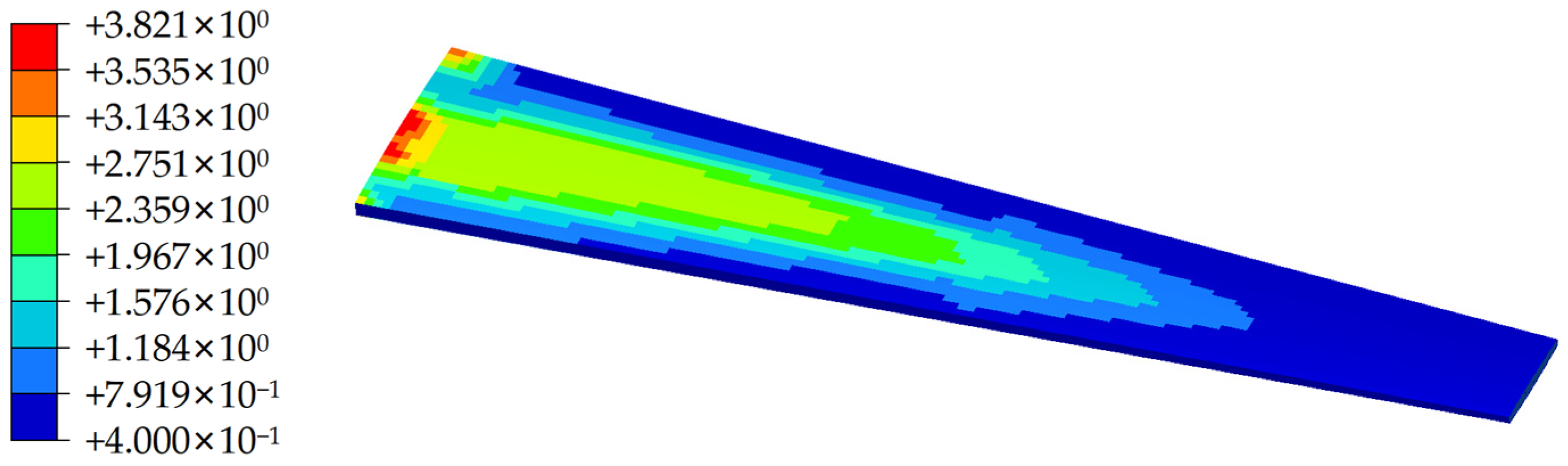
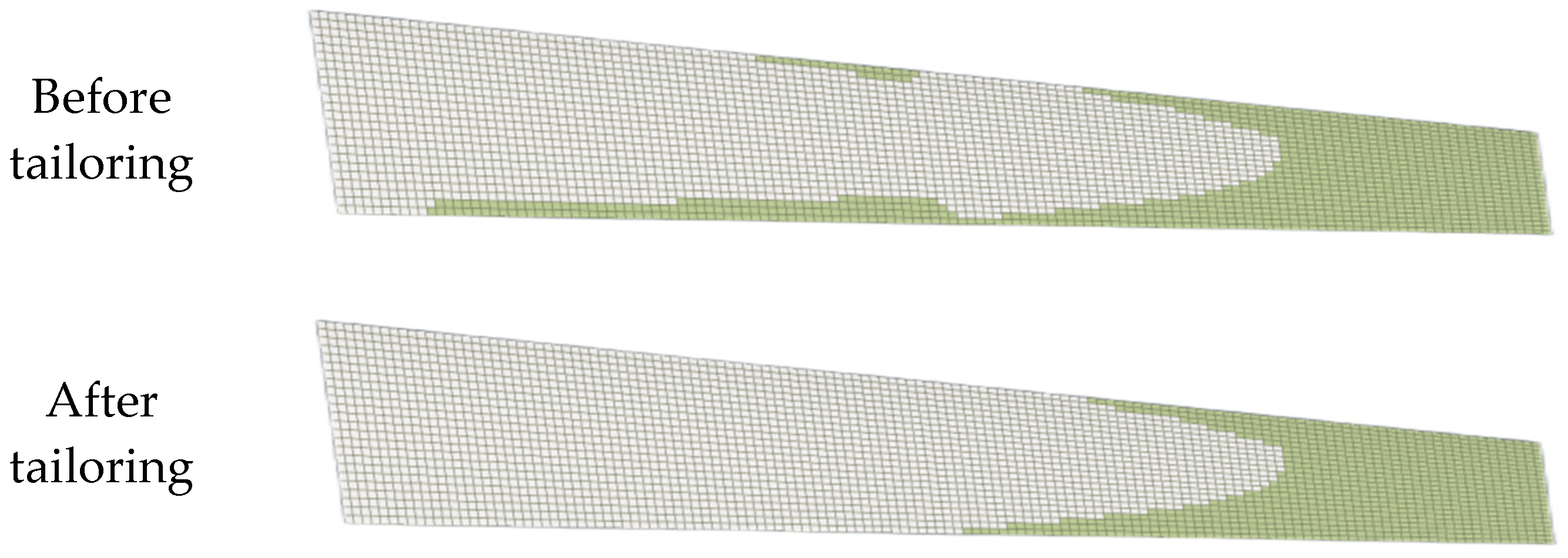
3.2.2. Composite Lay-Up Optimization
- a.
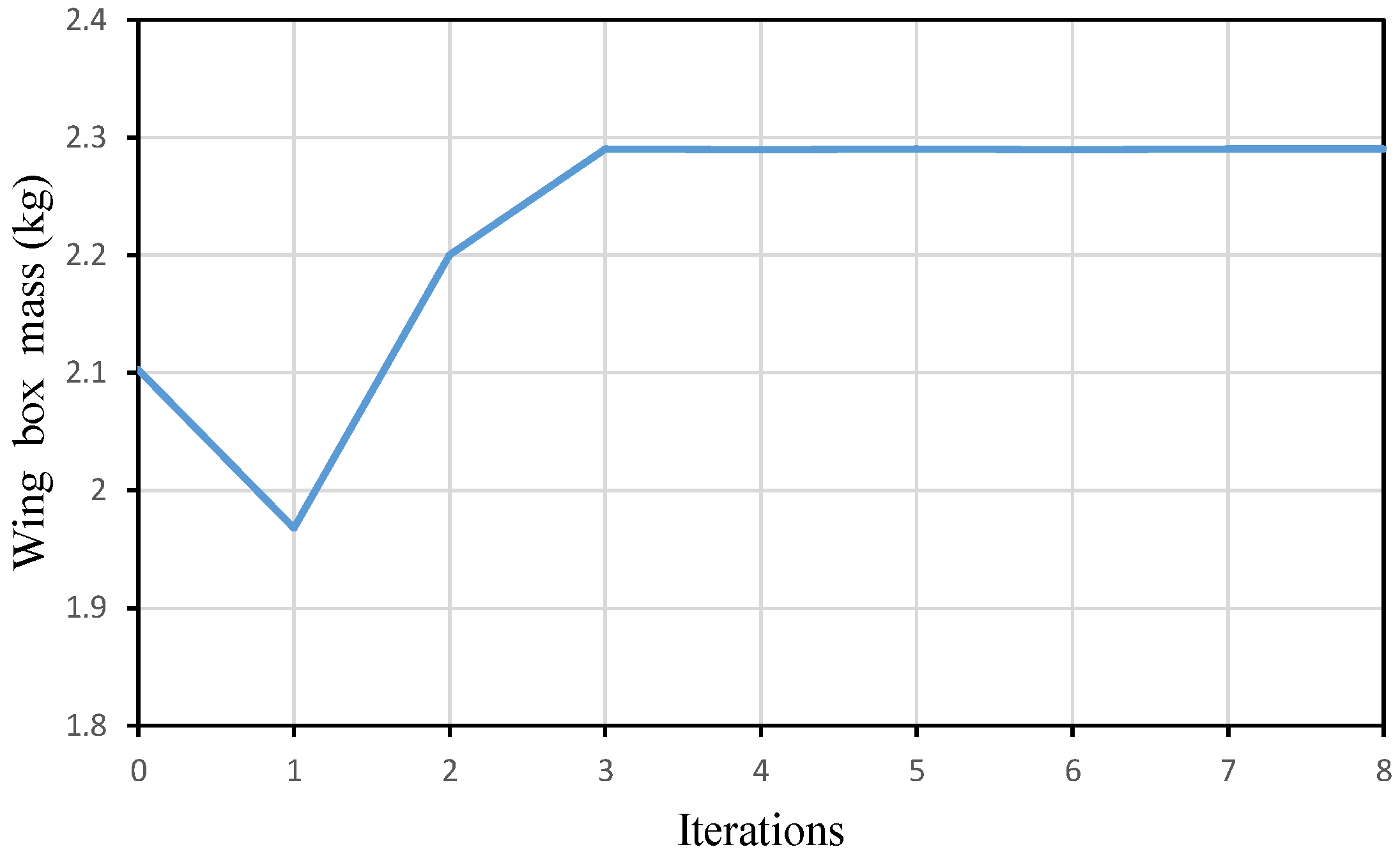
- Free-size optimization and tailoring
- b.
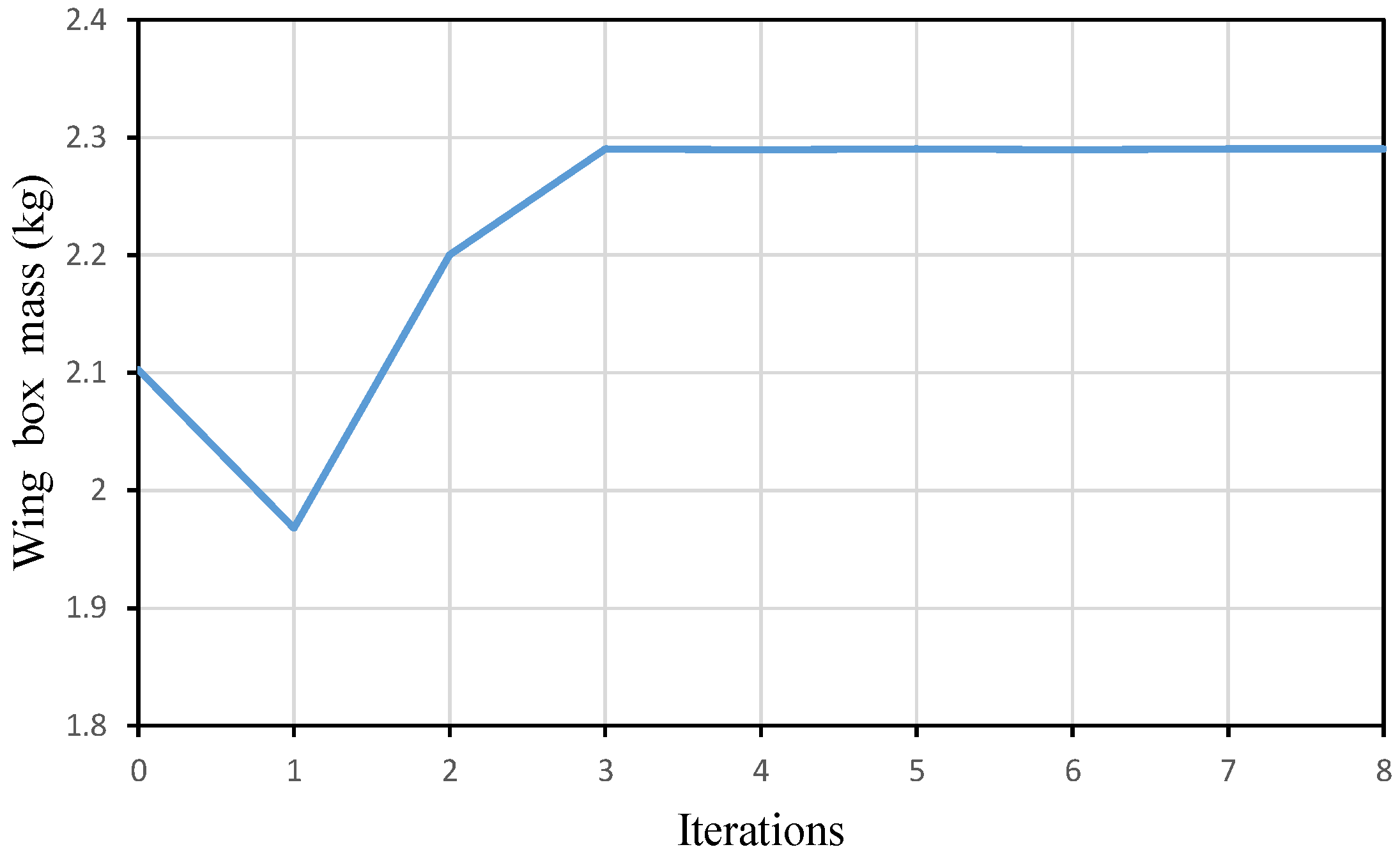
- Size optimization
- c.
- Ply stacking sequence optimization
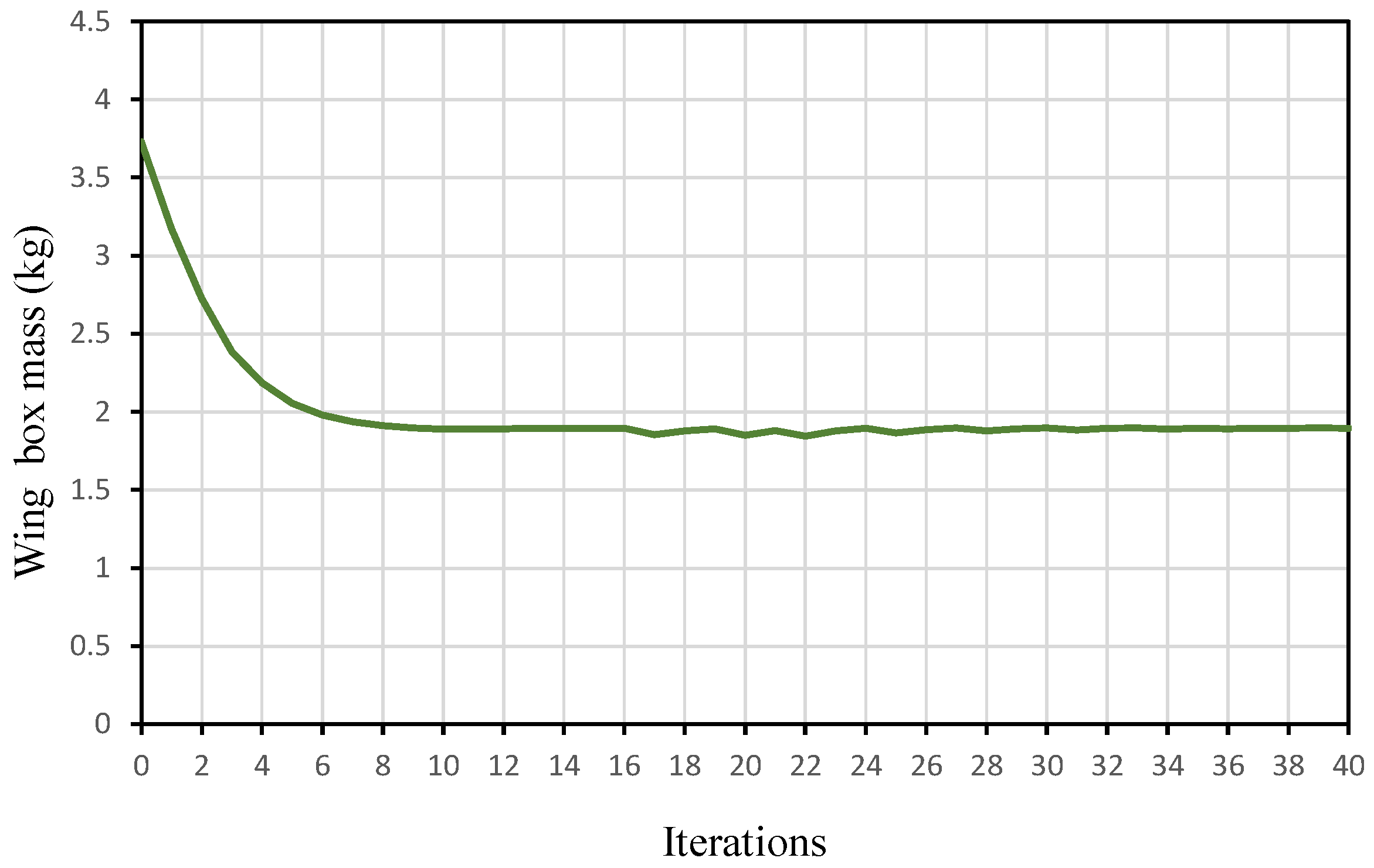
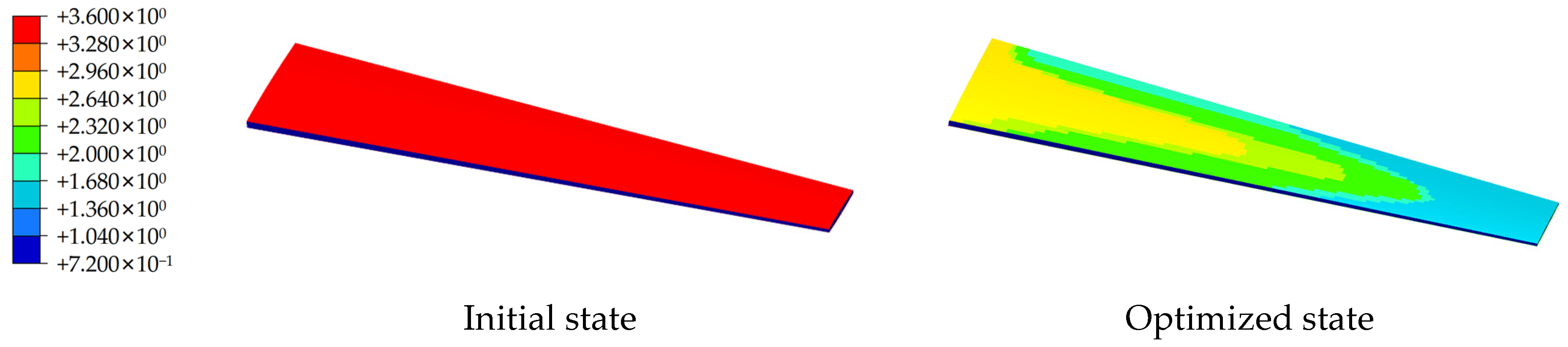
3.2.3. Discussion of Optimization Results
4. Conclusions
- The primary structure for the wing, fuselage, and empennage has been designed for a laboratory-developed reference tilt-duct UAV with general data for the aircraft included.
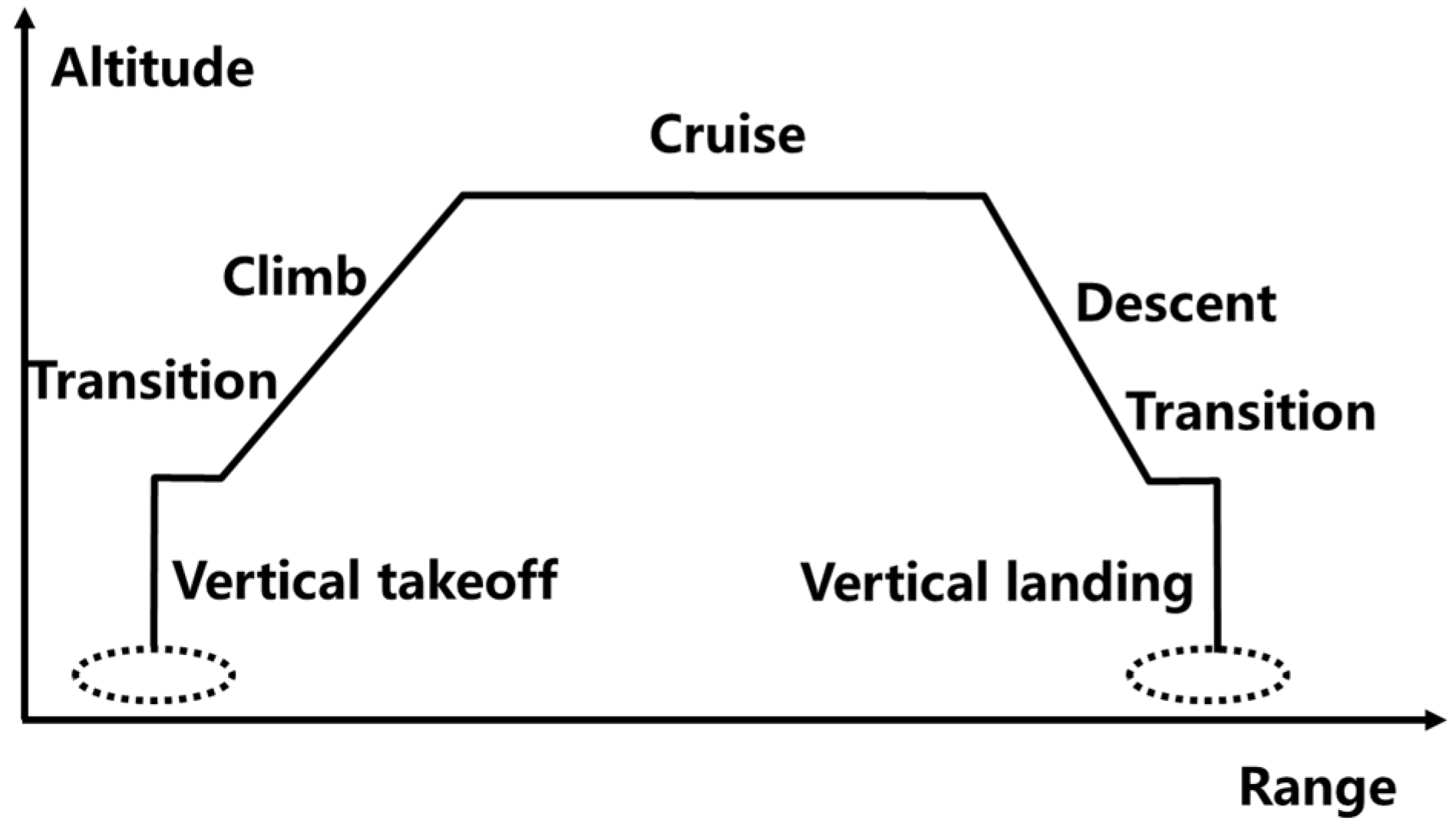
- Derived from the structural layout design for the wing, fuselage, and empennage, static analyses based on FEM have been carried out. The structural analysis results indicate that the design can fulfill structural requirements in cruise and hover/VTOL flight conditions, but more detailed studies on tilting process are still needed in the future.
- The optimization study, accounting for manufacturing constraints of the composite wing box, resulted in a substantial 38.6% reduction in the total mass of the wing box, exemplifying the promising potential for weight efficiency improvements within the tilt-duct configuration.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Armutcuoglu, O.; Kavsaoglu, M.S.; Tekinalp, O. Tilt duct vertical takeoff and landing uninhabited aerial vehicle concept design study. J. Aircr. 2004, 41, 215–223. [Google Scholar] [CrossRef]
- Paxhia, V.B.; Sing, E.Y. X-22a design development. J. Aircr. 1965, 2, 2–8. [Google Scholar] [CrossRef]
- Zhang, T.; Barakos, G.N. Review on ducted fans for compound rotorcraft. Aeronaut. J. 2020, 124, 941–974. [Google Scholar] [CrossRef]
- Kiesewetter, L.; Shakib, K.H.; Singh, P.; Rahman, M.; Khandelwal, B.; Kumar, S.; Shah, K.A. Holistic review of the current state of research on aircraft design concepts and consideration for advanced air mobility applications. Prog. Aerosp. Sci. 2023, 142, 100949. [Google Scholar] [CrossRef]
- Whiteside, S.K.; Pollard, B.P. Conceptual design of a tiltduct reference vehicle for urban air mobility. In Proceedings of the Aeromechanics for Advanced Vertical Flight Technical Meeting, Transformative Vertical Flight 2022, San Jose, CA, USA, 25–27 January 2022. [Google Scholar]
- Zhang, J.; Liu, Y.; Jiang, T.; Zheng, Y. Conceptual Design and System Level Analysis of Tilt-Duct eVTOL Aircraft. In Proceedings of the Asia-Pacific International Symposium on Aerospace Technology, Jeju, Republic of Korea, 15–17 November 2021. [Google Scholar]
- Chang, S.; Cho, A.; Choi, S.; Kang, Y.; Kim, Y.; Kim, M. Flight testing full conversion of a 40-kg-class tilt-duct unmanned aerial vehicle. Aerosp. Sci. Technol. 2021, 112, 106611. [Google Scholar] [CrossRef]
- German, B.; Jha, A.; Welstead, J.; Whiteside, S.; Blaesser, N.J. Design and Programmatic Overview of the Research Aircraft for eVTOL Enabling techNologies (RAVEN) Activity. In AIAA AVIATION 2023 Forum; AAIA: Fairfax, VA, USA, 2023. [Google Scholar]
- Vegh, J.M.; Botero, E.; Clark, M.; Smart, J.; Alonso, J.J. Current capabilities and challenges of NDARC and SUAVE for eVTOL aircraft design and analysis. In Proceedings of the 2019 AIAA/IEEE Electric Aircraft Technologies Symposium (EATS), Indianapolis, IN, USA, 22–24 August 2019. [Google Scholar]
- López, N.S.; Santamaría, A.M.; Castro, S.G. Preliminary aerodynamic design and load calculation of a long-range eVTOL aircraft. In AIAA SCITECH 2022 Forum; AAIA: Fairfax, VA, USA, 2022. [Google Scholar]
- Wadia, K.; Buszek, M.; Poliakov, N.; Castro, S.G. Preliminary design and analysis of crashworthy structures for a long-range eVTOL aircraft. In AIAA Scitech 2022 Forum; AAIA: Fairfax, VA, USA, 2022. [Google Scholar]
- Shim, S.; Ahn, C.; Chang, Y.; Cha, W.; Hwang, M.; Park, S.; Shin, S.J. Weight Fraction Estimation for EVTOL Vehicle Sizing. In AIAA AVIATION 2023 Forum; AAIA: Fairfax, VA, USA, 2023. [Google Scholar]
- Smart, J.T.; Alonso, J.J. Primary Weight Estimation for eVTOLs via Explicit Analysis and Surrogate Regression. In AIAA Aviation 2019 Forum; AAIA: Fairfax, VA, USA, 2019. [Google Scholar]
- Critchfield, T.; Ning, A. Low-fidelity design optimization and parameter sensitivity analysis of tilt-rotor eVTOL electric propulsion systems. In AIAA SCITECH 2023 Forum; AAIA: Fairfax, VA, USA, 2023. [Google Scholar]
- Thu, Z.W.; Ahn, J.H.; Lee, J.L.; Kwon, D.Y.; Choi, Y.J.; Won, W.J.; Tyan, M.; Lee, J.W. Enhanced Performance Prediction of Hydrogen Fuel Cell Powered eVTOL UAV. In AIAA AVIATION 2022 Forum; AAIA: Fairfax, VA, USA, 2022. [Google Scholar]
- Wu, Y.; Deniz, S.; Shi, Y.; Wang, Z.; Huang, D. Precision Landing Trajectory Optimization for eVTOL Vehicles with High-Fidelity Aerodynamic Models. In AIAA AVIATION 2023 Forum; AAIA: Fairfax, VA, USA, 2023. [Google Scholar]
- Chauhan, S.S.; Martins, J.R. Tilt-wing eVTOL takeoff trajectory optimization. J. Aircr. 2020, 57, 93–112. [Google Scholar] [CrossRef]
- Belardo, M.; Beretta, J.; Marano, A.D.; Diodati, G.; Paletta, N.; Di Palma, L. On the preliminary structural design strategy of the wing of the Next-Generation Civil Tiltrotor technology demonstrator. Int. J. Aeronaut. Space Sci. 2021, 22, 613–624. [Google Scholar] [CrossRef]
- Belardo, M.; Marano, A.D.; Beretta, J.; Diodati, G.; Graziano, M.; Capasso, M.; Ariola, P.; Orlando, S.; Di Caprio, F.; Paletta, N.; et al. Wing structure of the Next-Generation Civil Tiltrotor: From concept to preliminary design. Aerospace 2021, 8, 102. [Google Scholar] [CrossRef]
- Kambampati, S.; Smith, E.C. Aeroelastic optimization of high-speed tiltrotor wings with wing extensions and winglets. J. Aircr. 2017, 54, 1718–1727. [Google Scholar] [CrossRef]
- Kim, T.; Lim, J.; Shin, S.; Kim, D.H. Structural design optimization of a tiltrotor aircraft composite wing to enhance whirl flutter stability. Compos. Struct. 2013, 95, 283–294. [Google Scholar] [CrossRef]
- Marano, A.D.; Belardo, M.; Beretta, J.; Starace, F.; Orlando, S.; Punzi, C.; Frajese, R.; Paletta, N.; Di Palma, L. Aeroelastic Tailoring of the Next Generation Civil Tiltrotor Technological Demonstrator Composite Wing. Aerospace 2022, 9, 335. [Google Scholar] [CrossRef]
- Marano, A.D.; Diodati, G.; Paletta, N.; Di Palma, L.; Belardo, M.; Nour, P.A. Structural Scalability Preliminary Studies for the Next Generation Civil Tiltrotor Composite Wing. Aerospace 2023, 10, 478. [Google Scholar] [CrossRef]
- Park, J.S.; Jung, S.N.; Lee, M.K.; Kim, J.M. Design optimization framework for tiltrotor composite wings considering whirl flutter stability. Compos. Part B Eng. 2010, 41, 257–267. [Google Scholar] [CrossRef]
- Sun, F.; Jiang, C.; Shen, Y.; Wang, H. Surrogate Model-Based Parametric Structural Design of a Composite Tiltrotor Blade. In Proceedings of the Asia-Pacific International Symposium on Aerospace Technology, Jeju, Republic of Korea, 15–17 November 2021. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Initial Design | Free Size Opt. | Simplified Tailoring | Size Opt. | Ply Stacking Sequence Opt. | |
|---|---|---|---|---|---|
| Mass (kg) | 3.73 | 1.89 | 2.10 | 2.29 | 2.29 |
| Displacement (mm) | 20.78 | 31.16 | 30.29 | 29.35 | 30.86 |
| Strain (με) | 1962 | 2064 | 2079 | 2741 | 2834 |
| Stress (MPa) | 320.0 | 353.8 | 340.3 | 415.1 | 396.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, S.; Liu, Y.; Zhang, J.; Zheng, Y. Preliminary Design and Optimization of Primary Structures for a Tilt-Duct UAV. Aerospace 2024, 11, 286. https://doi.org/10.3390/aerospace11040286
Xu S, Liu Y, Zhang J, Zheng Y. Preliminary Design and Optimization of Primary Structures for a Tilt-Duct UAV. Aerospace. 2024; 11(4):286. https://doi.org/10.3390/aerospace11040286
Chicago/Turabian StyleXu, Shangru, Yaolong Liu, Jifa Zhang, and Yao Zheng. 2024. "Preliminary Design and Optimization of Primary Structures for a Tilt-Duct UAV" Aerospace 11, no. 4: 286. https://doi.org/10.3390/aerospace11040286
APA StyleXu, S., Liu, Y., Zhang, J., & Zheng, Y. (2024). Preliminary Design and Optimization of Primary Structures for a Tilt-Duct UAV. Aerospace, 11(4), 286. https://doi.org/10.3390/aerospace11040286