1. Introduction
Hypersonic aircraft have captured substantial interest and fascination in recent years, primarily due to their astounding capabilities, encompassing unparalleled penetration potential and extraordinary destructive effects. Compared to traditional aircraft, hypersonic aircraft possess inherent traits that set them apart, including nonlinearity, rapidly changing dynamics, and strong coupling [
1,
2,
3]. These distinctive characteristics bring about intricate challenges, further exacerbated by significant model uncertainty, when designing control systems for hypersonic aircraft. The complexities associated with hypersonic flight are multifaceted and substantial. They arise from the intricate interplay of various factors, making crafting effective control systems for these aircraft arduous. These factors include the unique qualities intrinsic to hypersonic aviation, such as their nonlinearity, rapid and time-varying dynamics, and strong coupling, necessitating innovative solutions to address and manage these complexities. The substantial model uncertainty further complicates the formidable challenges in developing robust and efficient control systems tailored for hypersonic aircraft.
The attention and interest in hypersonic aircraft stem from their distinctive and exceptional capabilities, particularly their ability to penetrate and cause substantial damage. However, these extraordinary capabilities also come with intricacies and challenges that must be overcome, requiring innovative and advanced solutions in control system design. In the intricate and demanding flight environments hypersonic aircraft navigate, unpredictable airflow disturbances introduce a critical challenge, leading to actuator saturation. This undesirable condition significantly hampers the effectiveness of control inputs, impairing the aircraft’s maneuverability and responsiveness [
4,
5]. The limitations imposed on the actuators result in a constrained control force, which, in turn, has adverse effects on the aircraft’s overall flight performance.
Moreover, this limitation on control inputs can even escalate to inducing instability within the aircraft’s control system, further underscoring the importance of addressing and mitigating input saturation concerns. Conversely, another aspect that exacerbates the complexity of managing hypersonic flight is the issue of operating at excessively high fuel equivalence ratios. Such a condition can provoke engine thermal blockage. When the actuator and fuel equivalence ratio of the aircraft reaches a certain upper or lower limit of the input signal, the saturation phenomenon occurs, leading to negative effects on the system response, which has the potential to pose grave risks and challenges to the aircraft’s operation [
6,
7]. This further emphasizes the critical need to address and alleviate the issues associated with input saturation. The actuator saturation and engine thermal blockage present a complex set of constraints that require innovative solutions to ensure hypersonic aircraft safety, stability, and optimal performance in these demanding flight conditions.
Prior research has made notable strides in addressing actuator constraints and dynamics issues, using auxiliary systems to counteract saturation nonlinearity in control commands, and employing neural adaptive mechanisms to mitigate uncertainties and disturbances [
8]. Additional contributions have explored auxiliary systems generating compensation signals to manage actuator amplitude constraints [
9], introduced anti-saturation fixed-time compensators to ensure system stability and expedite exit from saturation regions [
10,
11], and proposed Nussbaum gain adaptive controllers to address actuator saturation during hypersonic aircraft re-entry [
12]. Fuzzy methods have also been used to construct auxiliary systems with adaptive laws for fuzzy interference attenuators [
13], and adaptive fault-tolerant controllers based on obstacle Lyapunov functions have been designed to resolve input saturation issues [
14]. Furthermore, adaptive neural control with auxiliary error compensation has been employed to effectively follow speed and altitude commands in actuator saturation system uncertainty [
15].
While significant progress has been made in the field, it is essential to recognize that persistent challenges remain, particularly in actuator saturation under high dynamic conditions, signal noise identification, and developing anti-saturation strategies that can adapt with precision in real time. This article takes a pioneering approach to address these gaps in current research by integrating two distinct yet complementary domains: Radial Basis Function Neural Network (RBFNN) theory and adaptive control theory. This integration is thoughtfully tailored to hypersonic vehicles’ mission profiles and operational environments. The outcome of this novel fusion is the development of an RBFNN adaptive controller and an anti-saturation auxiliary system. The RBFNN adaptive controller is meticulously designed to enhance system stability and ensure precise tracking, even in severe input saturation scenarios. Leveraging the capabilities of neural networks, this controller adapts and optimizes control inputs, effectively mitigating the adverse effects of actuator saturation in high dynamic conditions. Its ability to adapt to changing needs and maintain precise control addresses a long-standing challenge in hypersonic flight control. In parallel, the anti-saturation auxiliary system is engineered to work harmoniously with the RBFNN adaptive controller. This auxiliary system can dynamically adjust the precision of anti-saturation measures, offering a responsive and timely approach to counteract actuator saturation. This adaptability is designed to cater to hypersonic flight’s unique and demanding needs, where input saturation levels can fluctuate rapidly due to varying mission profiles and operational environments. By uniting the strengths of RBFNN and adaptive control theory and applying them within the context of hypersonic vehicles, this article strives to bridge existing research gaps and advance the boundaries of control systems. The ultimate objective is to establish more excellent system stability and precision in tracking, even in the face of challenging and dynamically changing conditions, thus making a substantial contribution to the advancement of hypersonic aircraft technology.
The goal is to address the complex challenges of hypersonic flight control, which are characterized by input saturation, model uncertainty, and external disturbances. Due to the inherent characteristics of hypersonic aircraft, including nonlinearity, rapidly changing dynamics, and strong coupling, these challenges are particularly evident. This research introduces several pivotal innovations that significantly advance the field. To enhance the adaptability and robustness of the control system, we have developed adaptive laws integrating mission profiles, actuator saturation failure modes, and a self-evolving neural network design. In the meantime, the approach introduces a novel anti-input saturation auxiliary system, addressing input saturation constraints and ensuring system stability and precise tracking even in severe conditions. First, the RBFNN adaptive controller stands out with its enhanced capabilities regarding system state convergence and tracking accuracy compared to previous methodologies [
16]. It substantially improves system state convergence, ensuring the aircraft’s operations are more efficient and safer.
Additionally, this advanced controller achieves superior tracking accuracy, which is paramount in guiding hypersonic aircraft with precision. Second, this research brings forth a breakthrough in ensuring robust stability even under conditions of severe input saturation, a common challenge in hypersonic flight. The newly developed auxiliary system plays a central role in this achievement, guaranteeing system stability even when confronted with extreme input saturation scenarios during hypersonic flight. This accomplishment enhances hypersonic aircraft’s safety and reliability by ensuring the control system remains effective and precise, even under the most demanding operational conditions. Collectively, these innovations represent a significant leap forward in hypersonic aircraft control, addressing critical issues and advancing state-of-the-art technology.
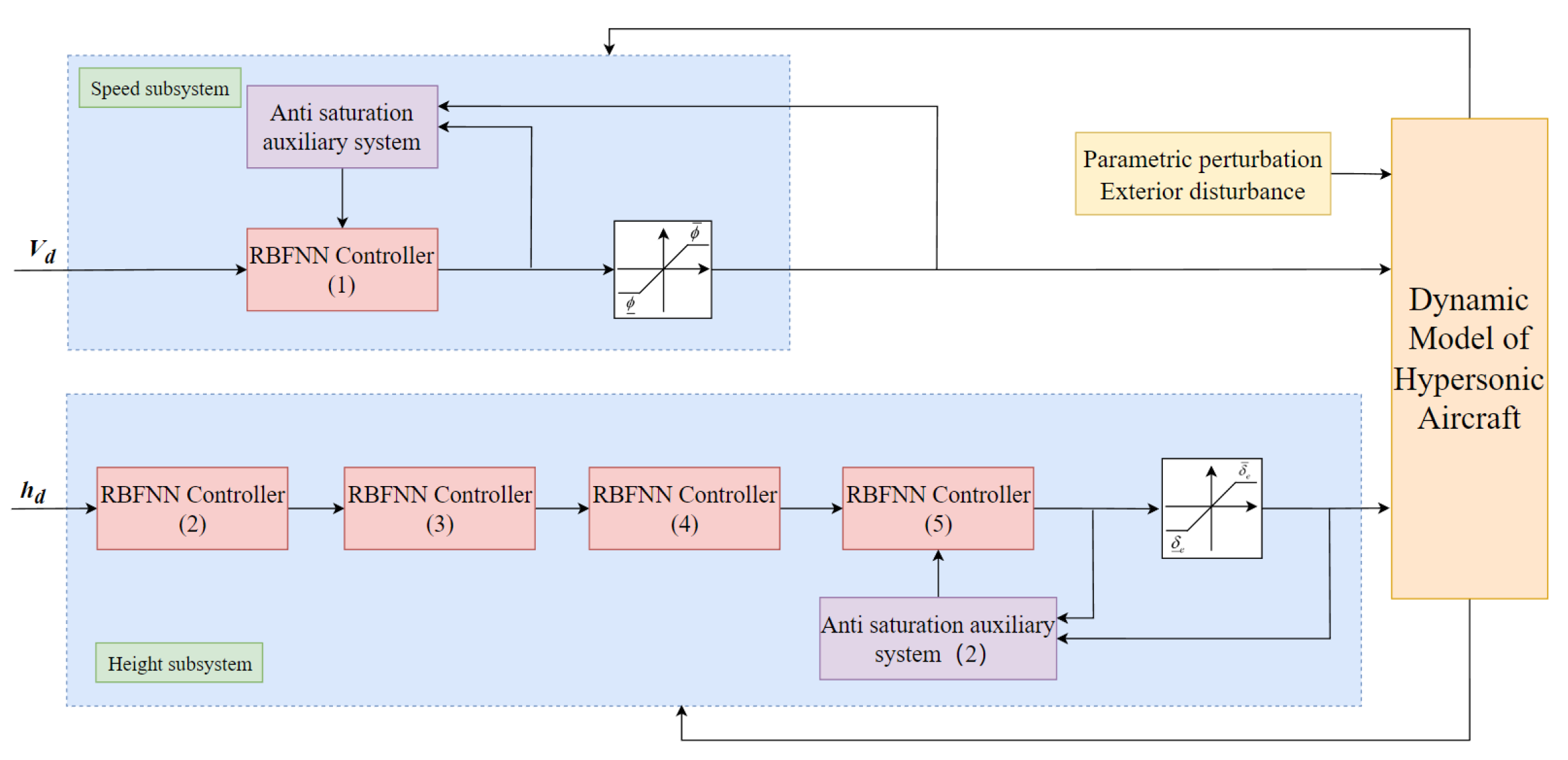
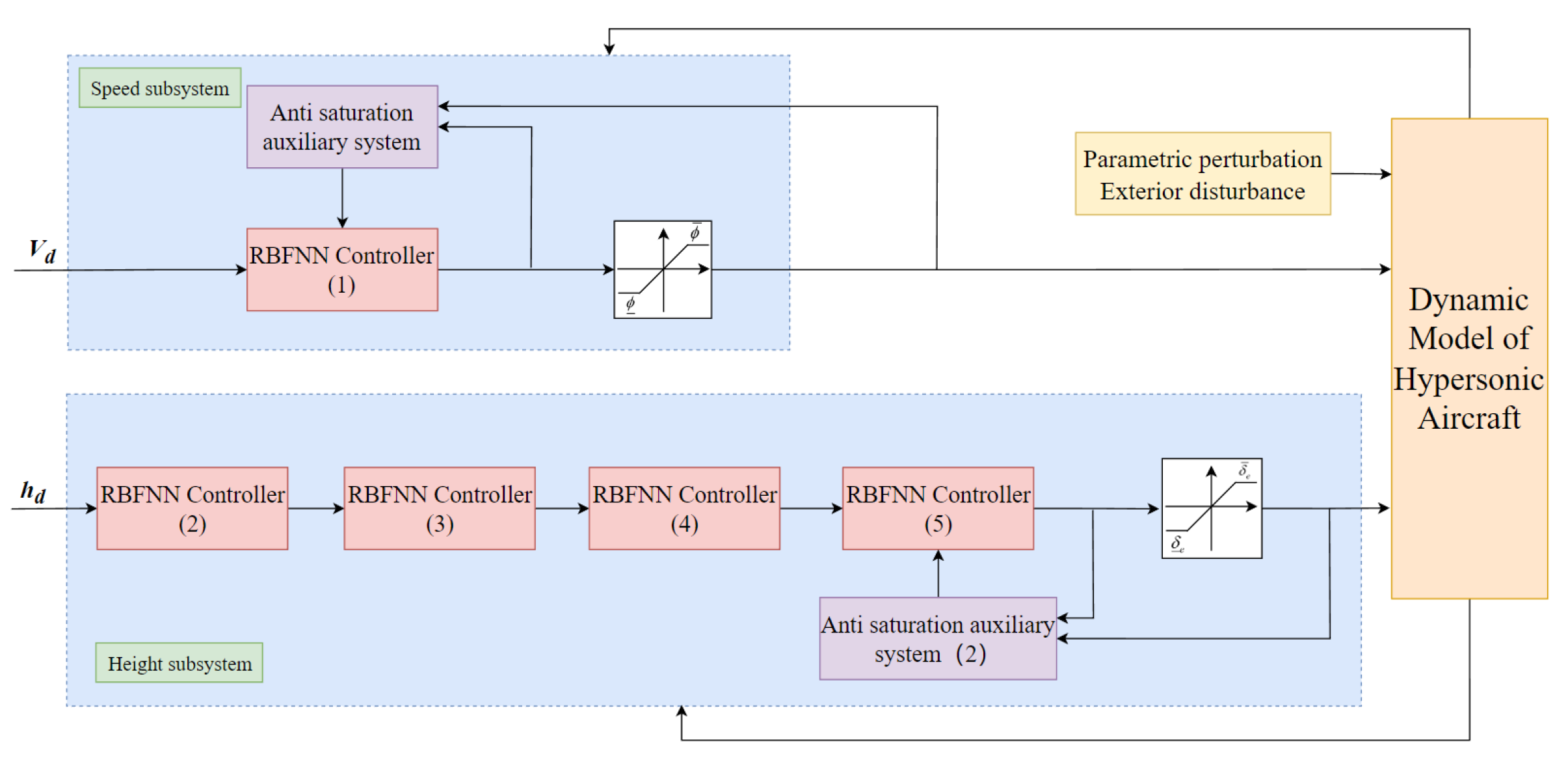
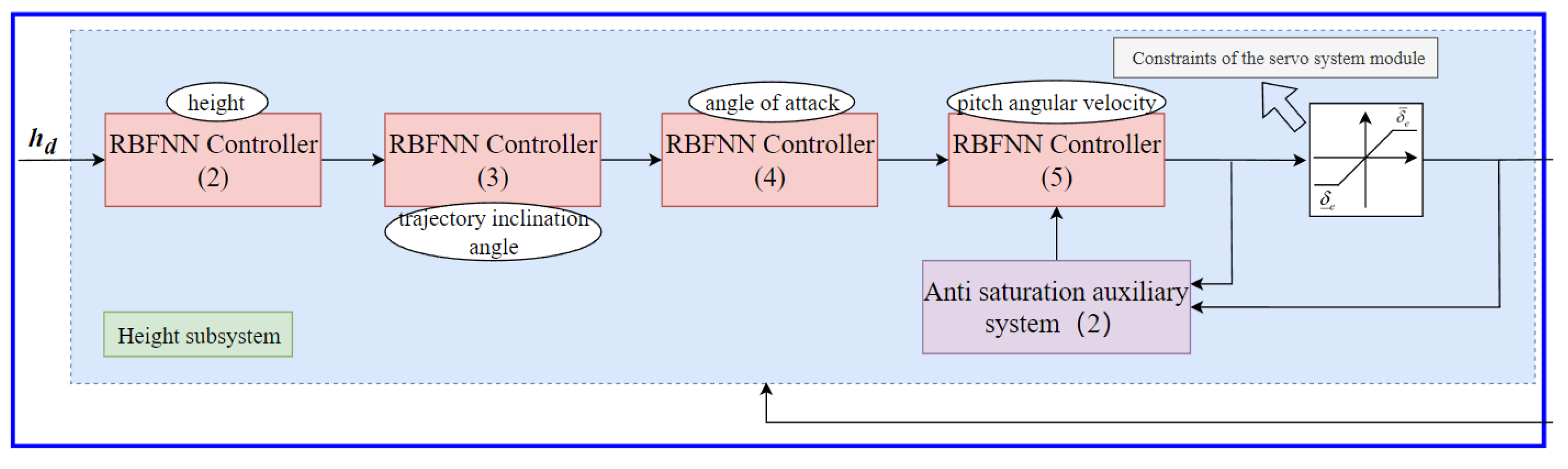
This article commences by transforming the dynamic model of hypersonic aircraft into a strict feedback form, facilitating subsequent controller design. Subsequently, RBFNN adaptive controllers are designed for the speed and height subsystems to address parameter uncertainty effectively. Adaptive laws are introduced upon Lyapunov’s theory, and a novel saturation auxiliary system is devised to manage input constraints. The ensuing stability analysis, grounded in Lyapunov theory, substantiates the efficacy and advancement of the proposed method through comprehensive simulation analysis.
The combination of RBFNN adaptive control and anti-saturation strategies in this research marks a groundbreaking step towards improving hypersonic aircraft’s controllability, stability, and overall robustness. This work represents a significant advancement in state-of-the-art hypersonic vehicle control, offering concrete solutions to the intricate challenges that have historically hindered the realization of their full potential. By integrating cutting-edge neural network techniques with innovative anti-saturation strategies, this research not only pushes the boundaries of what is achievable but also provides practical solutions for enhancing the capabilities of hypersonic aircraft. As a result, it holds the promise of safer and more effective hypersonic missions and opens new horizons for fully utilizing the extraordinary potential of these aircraft.
3. Results
In this chapter, we delve into the conduction of simulation experiments within two distinct scenarios to comprehensively assess and validate the efficacy of the proposed scheme. The basis for these experiments lies in utilizing a nominal trajectory, which serves as the reference for generating speed and altitude commands. To enhance the fidelity of the system’s response, a second-order filter has been thoughtfully designed, taking into account both the signal spectrum characteristics and the performance indicators of the rudder system. (Refer to
Figure 7 for a visual representation of this design.)
It is essential to note that a comparison method will be used to benchmark the forthcoming simulation experiments. This comparison method utilizes an adaptive finite-time backstepping controller, which notably does not consider the actuator saturation characteristics. This method is selected for comparison to provide a clear contrast with the proposed scheme and serves as a benchmark for evaluating the improvements and effectiveness of the newly introduced control methodology.
,
is 95,
,
is 0.03. The aerodynamic data and geometric con-figuration parameters are obtained from [
20], and the initial value is set to
= 0,
. Controller parameters are set to
,
,
,
,
, RBFNN input range is set to
,
is evenly distributed across various value ranges.
Scenario 1: due to systematic and random errors in speed sensors and height sensors, the initial error , is considered, and 20% aerodynamic parameter perturbation and unknown external disturbances are added on this basis, i.e., , is the nominal aerodynamic parameter.
The simulation results of Scenario 1 are visually depicted in
Figure 8,
Figure 9,
Figure 10 and
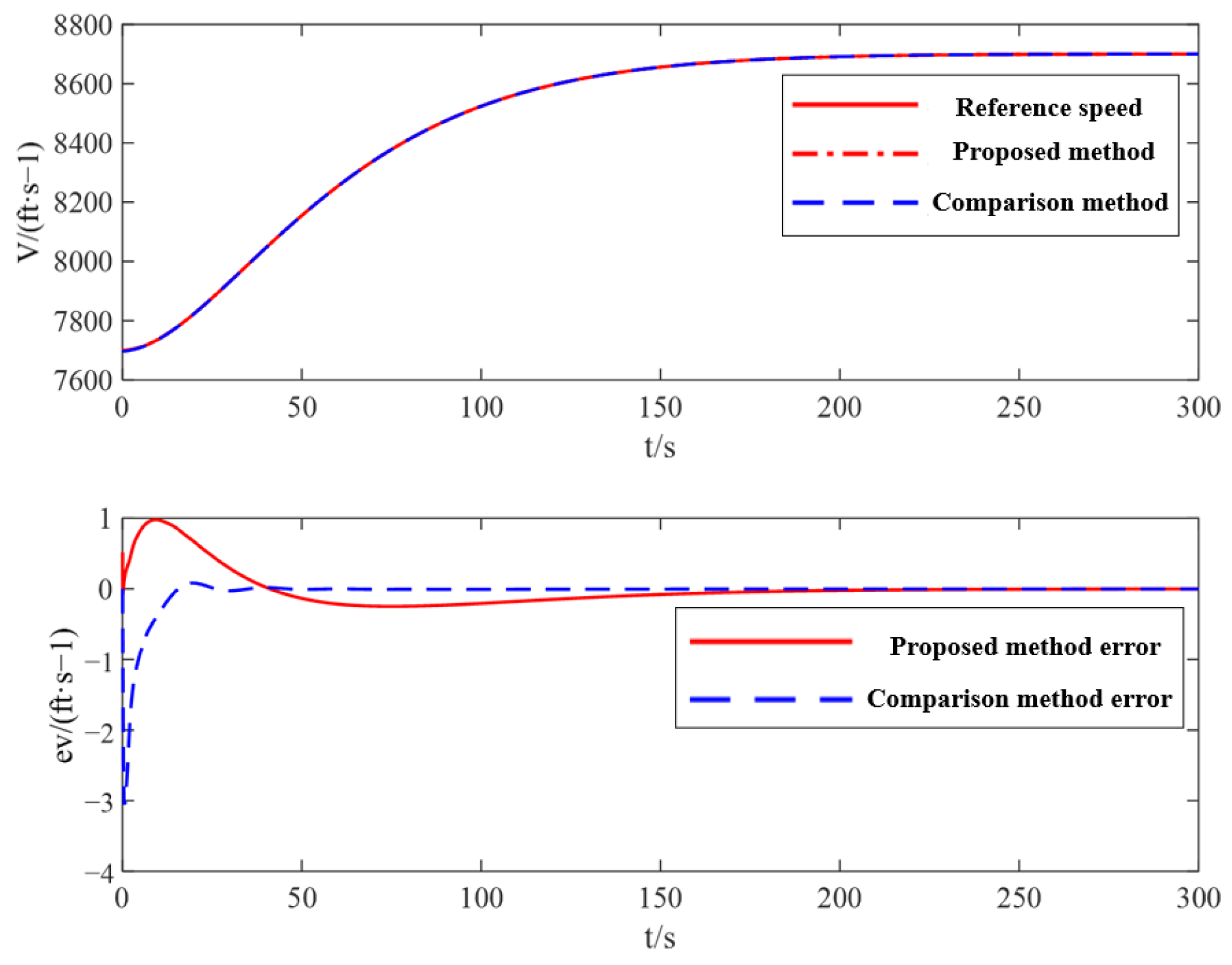
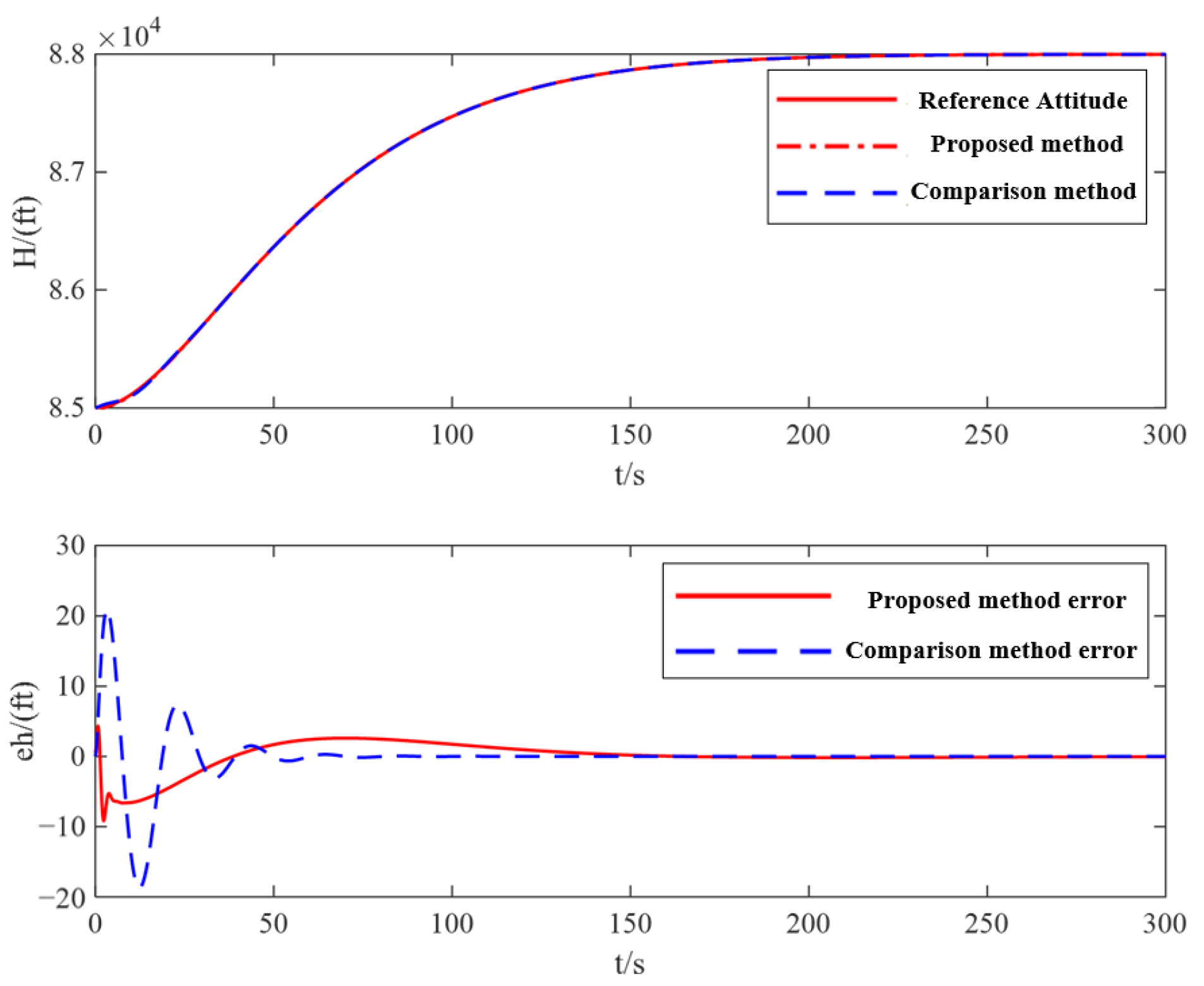
Figure 11. These figures comprehensively compare the methodology proposed in this paper and the method employed for comparison. Both approaches demonstrate the ability to achieve stable instructions tracking, ensuring that the desired trajectories are followed. However, upon closer examination of
Figure 8 and
Figure 9, it becomes evident that the technique introduced in this article excels in tracking performance, particularly concerning height and speed. The tracking error and error fluctuation are notably within a smaller range when employing the method outlined in this research. The maximum error fluctuation for both speed and height is substantially reduced by more than 50%, signifying a considerable improvement in precision and consistency.
Figure 10 and
Figure 11 reveal that the absolute value of state quantities, denoted as
, closely aligns with the comparison method, but the rate of convergence is significantly accelerated when utilizing the approach proposed in this paper. This acceleration signifies a more rapid adjustment and adaptation of the system to changing conditions, ultimately contributing to enhanced tracking and control. Furthermore, the system input operates within the linear region of the actuator, ensuring its high feasibility and practicality in real-world applications. These simulation results underscore the superiority of the proposed methodology in achieving more precise and reliable control in the context of hypersonic aircraft.
Scenario 2: considering the same initial error in Scenario 1, consider the more severe input saturation constraint of the actuator, , .
The simulation results for Scenario 2 are visually presented in
Figure 12,
Figure 13,
Figure 14,
Figure 15 and
Figure 16, offering a comprehensive analysis of the performance under specific conditions.
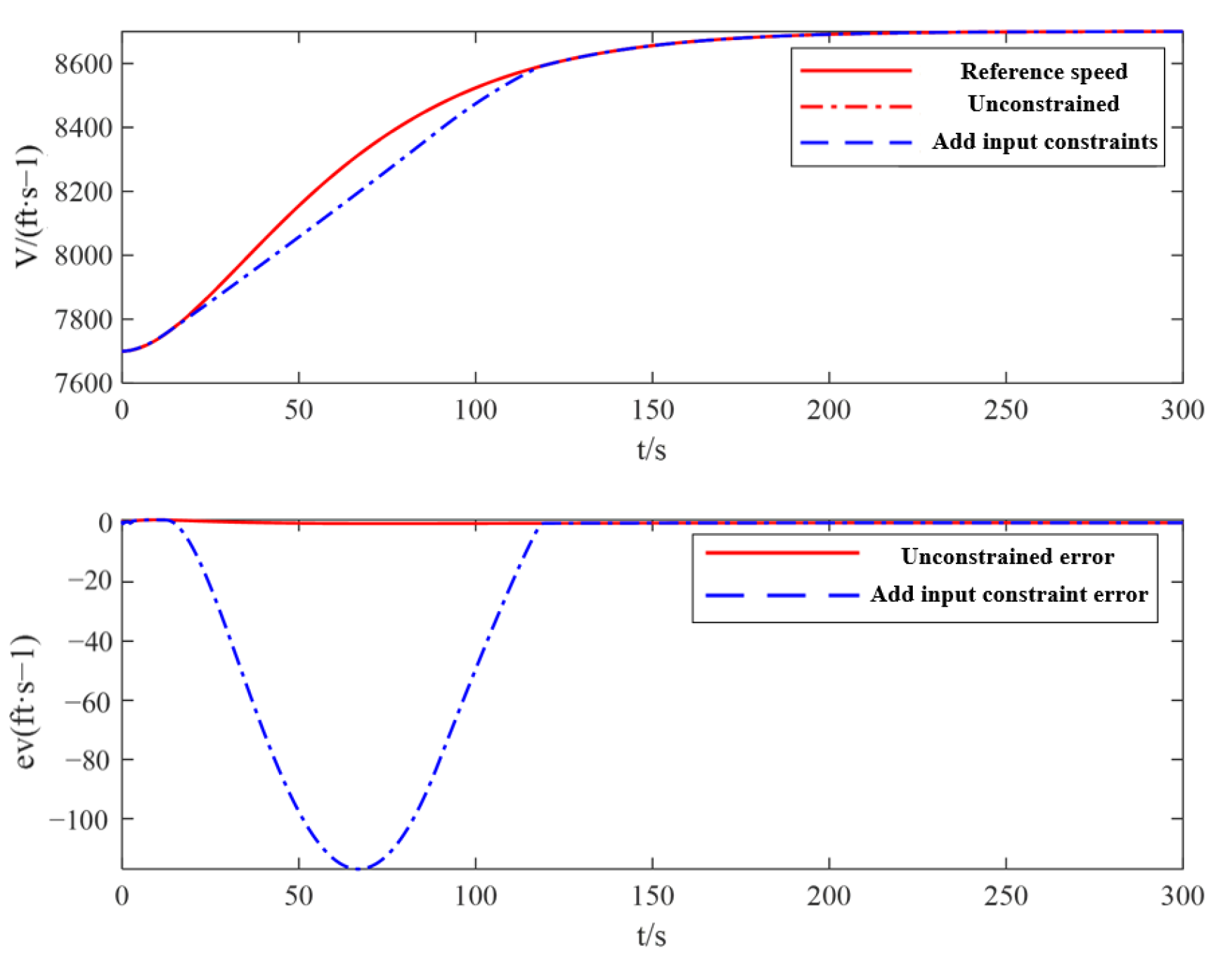
Figure 12 and
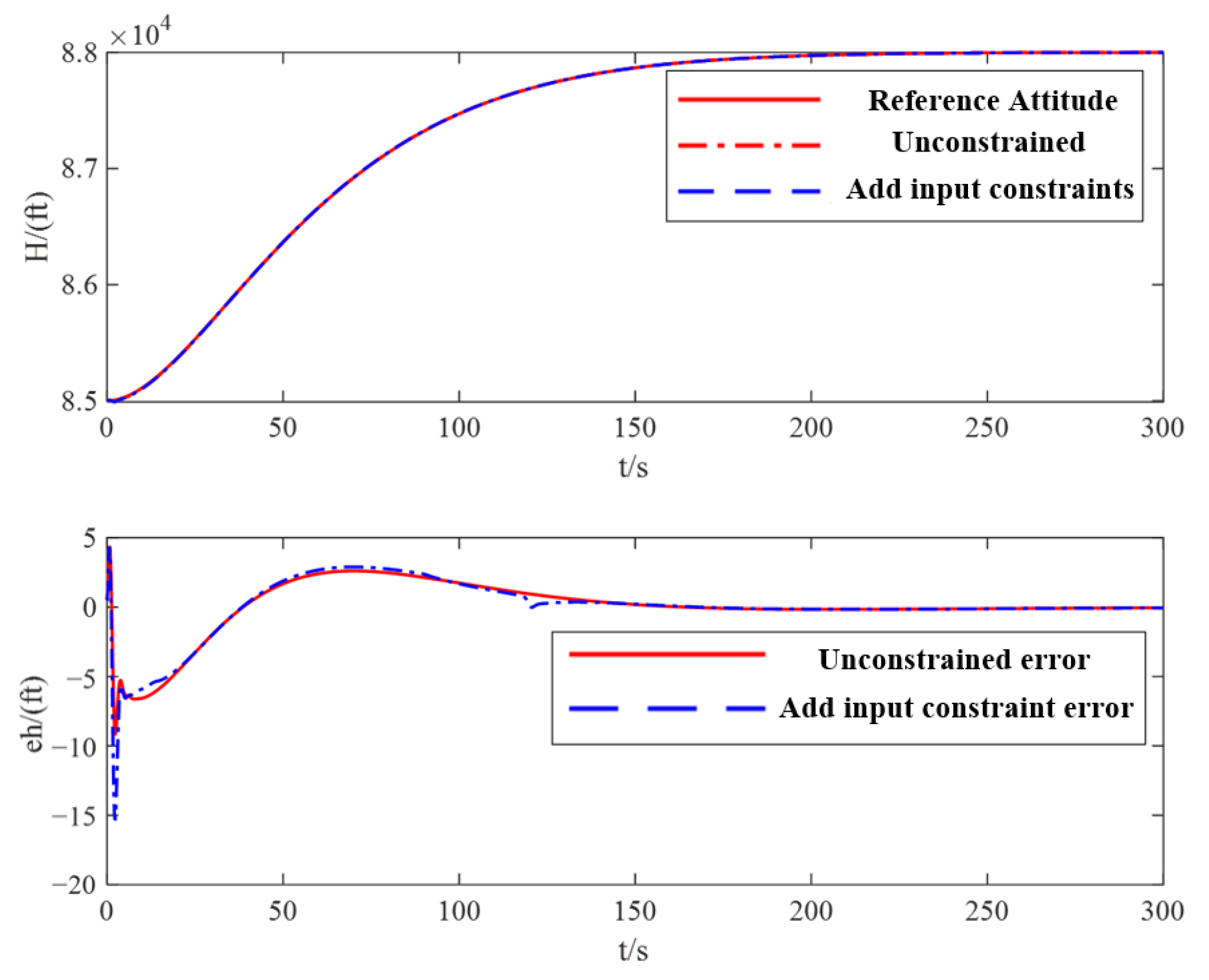
Figure 13 shed light on the behavior in the presence of severe input saturation constraints. Despite the possibility of resulting in a speed error of 1.5%, it is noteworthy that the convergence speed exhibits a remarkable 20% improvement, indicating the ability of the proposed approach to adapt and adjust rapidly in the face of challenging conditions. Moreover, the error remains small for height, demonstrating the capability to achieve fast and stable tracking, even under such constraints.
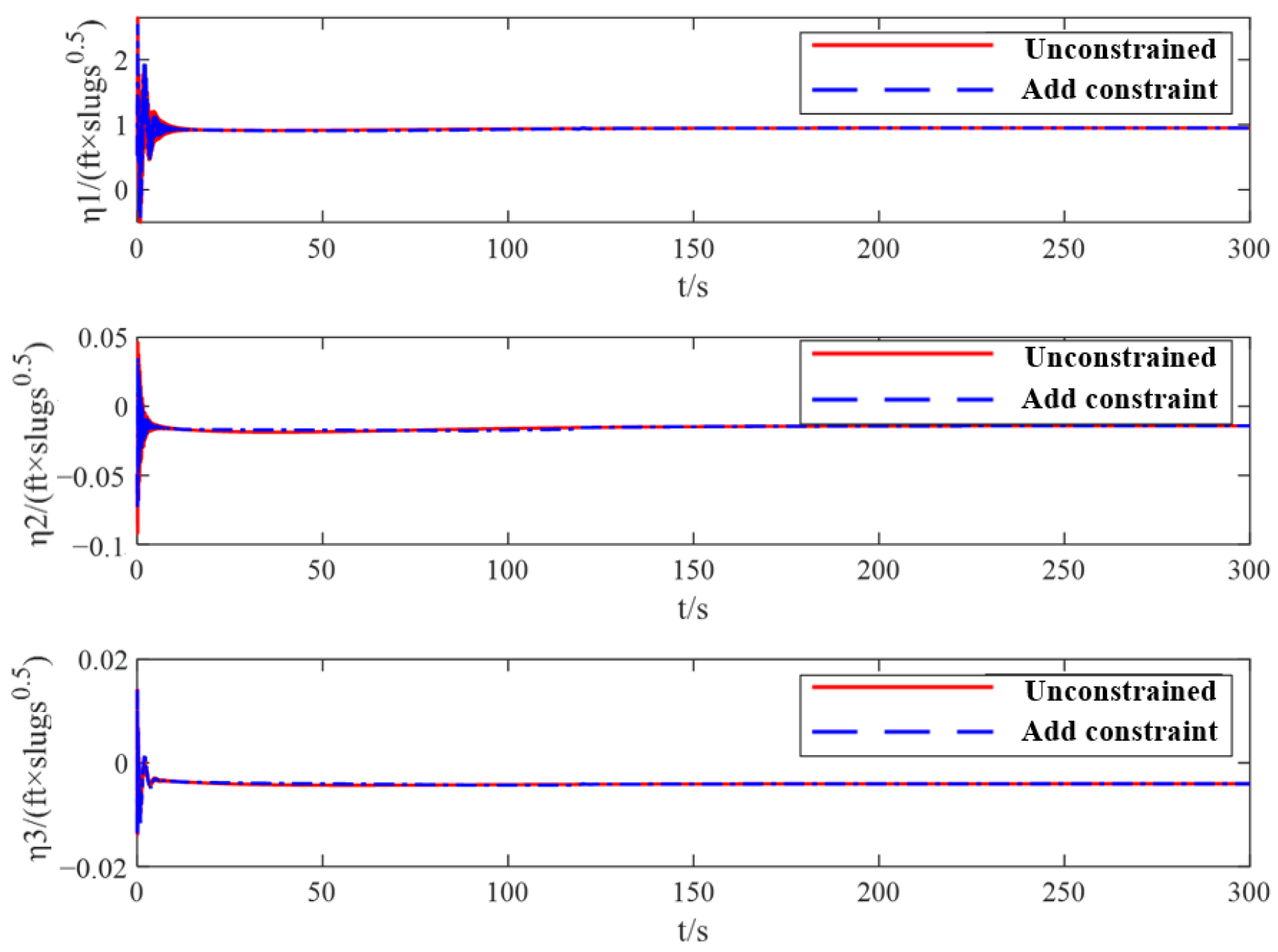
Figure 14 and
Figure 15 provide insights into the impact of severe saturation constraints on the system’s behavior and elastic states. Such constraints can induce inevitable fluctuations in both the system state quantity and the elastic state quantity. However, the compensation effect of the anti-saturation auxiliary system comes to the forefront, ensuring that these fluctuations do not exceed 15%. This places them well within an acceptable range, signifying the effectiveness of the anti-saturation auxiliary system in stabilizing the system and maintaining control over potentially erratic behaviors.
Furthermore, the effectiveness of the anti-saturation auxiliary system is further underscored by the input curve of the control system, as depicted in
Figure 16. This figure illustrates how the system input operates in response to the challenging conditions posed by severe saturation constraints. The system effectively compensates for these constraints, maintaining control and stability, thus providing empirical evidence of the anti-saturation system’s effectiveness in overcoming limitations and maintaining reliable control.
4. Conclusions
In this study, the integration of RBFNN theory and adaptive control theory, specifically within input saturation constraints, has led to the development of an RBFNN adaptive controller and an anti-saturation auxiliary system for hypersonic vehicle control, ultimately unveiling a groundbreaking approach to hypersonic vehicle control. The simulation results we have obtained indicate the remarkable efficacy of this novel scheme, elevating the significance and potential applications of this research. Key conclusions drawn from this study are as follows:
- (1)
Implementing the RBFNN adaptive controller has yielded significant quantifiable results. Notably, it has led to a remarkable reduction in the maximum error fluctuation of speed and height, with a decrease of over 50%. This outcome underscores the controller’s effectiveness in improving tracking accuracy and stability within the control system, contributing to its robustness in dealing with parameter uncertainties and disturbances.
- (2)
The anti-saturation auxiliary system has shown noteworthy quantitative results when operating under severe input saturation constraints. Although such limitations may lead to a speed error of 1.5%, this auxiliary system has demonstrated an impressive 20% improvement in convergence speed. These results indicate the system’s resilience in ensuring precise tracking, even in scenarios characterized by severe input saturation, highlighting its potential to mitigate the effects of saturation constraints and enhance control system performance.
The achievements of this research not only advance the field of hypersonic vehicle control but also hold the potential to foster practical applications. By reducing error fluctuations and enhancing convergence speed, this work significantly improves the adaptability and robustness of control systems in hypersonic vehicles, ultimately enhancing their real-world performance. However, due to the significant cost and safety constraints associated with conducting experiments on actual hypersonic vehicles, we plan to employ a semi-physical simulation approach to validate our results in future research endeavors. The controlled environment facilitates a systematic exploration of performance under various conditions, contributing to a comprehensive understanding. Additionally, semi-physical simulations allow tailored and realistic validation for hypersonic flight challenges. In conclusion, future semi-physical simulations are essential for a robust assessment of the proposed controller, aligning with the unique challenges of hypersonic flight.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}