1. Introduction
Gravitational waves (GWs) are perturbations of the metric tensor that describe the structure of four-dimensional spacetime. They are one of the theoretical predictions of Einstein’s field equations [
1,
2]. General relativity fundamentally transformed our understanding of spacetime by predicting the existence of GWs, a phenomenon later validated through groundbreaking observations [
3]. The gravitational-wave observatory (GWO) mission is to validate the general theory of relativity, unravel the origins of the universe, and investigate the mechanisms of space science [
4]. The first GW event directly detected by a Laser Interferometer Gravitational-Wave Observatory (LIGO), in 2015, was the merger of a binary black hole system, documented as GW150914 [
1]. Since then, LIGO has observed multiple GW events [
1,
5,
6]. LIGO, as a ground-based GWO, can only observe high-frequency GWs exceeding approximately 10 Hz owing to ground-based interference and arm-length limitations. Ground-based GWOs are unable to observe other scientifically significant low-frequency and medium-frequency GWs [
7]. To overcome the shortcoming of ground-based GWOs, space-based GWOs based on spacecraft formation flying have been proposed. The European Space Agency and the National Aeronautics and Space Administration first proposed the Laser Interferometer Space Antenna (LISA) mission in 1993 [
8], with the aim of observing low-frequency GWs, especially in the frequency range between 0.1 mHz and 1 Hz. Subsequently, many countries have proposed other GWO missions, such as “DECIGO” [
9], “BBO” [
10], “ALIA” [
11], “TianQin” [
12], and “Taiji” [
13]. The basic principle of space-based GWOs is to establish a space-based equilateral triangle formation with three spacecraft. The distance variation between spacecraft caused by GWs is measured based on the Michelson laser interferometer principle, which requires the formation configuration to be an equilateral triangle. So far, three effective mechanisms of triangle formation have been proposed—the co-orbital constellation, the relative orbit, and the triangle libration point.
Many researchers have studied how to design formations; however, few studies have specifically addressed GWO formation initialization. Formation design and initialization are tightly coupled. Some researchers have proposed equilateral triangle formation design methods based on orbital geometric relationships [
14,
15]. Marchi et al. [
16] and Zhang et al. [
17] suggested constructing a space circle formation using the Clohessy–Wiltshire (CW) equation, and then established an equilateral triangle through the uniform distribution of phases. Since the CW equation has only first-order accuracy, a formation design method based on the second-order CW equations was proposed by [
18]. Additionally, Liu et al. [
19] developed a polygonal formation design method using the CW equation, effectively increasing the arm-length. To ensure the designed configuration meets the necessary requirements, further optimization of the design is essential. Xia et al. [
20] optimized the natural orbital configuration of LISA using a hybrid reactive tabu search algorithm. Yang et al. [
21] treated a LISA-like GWO formation as an optimization problem, considering the earth trailing angle, breathing angle and relative velocity as performance indices, and the unperturbed solution was obtained; however, this solution was not a global optimal solution. Xie et al. [
22] combined analytical and numerical methods to design and optimize an initial formation, proposing an adaptive solution space adjustment algorithm to enhance the convergence efficiency of the differential evolution (DE) algorithm. Ye et al. [
23] presented combined methods to optimize the TianQin orbits to meet stability requirements. Zhang et al. [
24] established a dynamical model based on dual quaternion theory and optimized the orbit design using a genetic algorithm. For the configuration initialization aspects, Xia et al. [
20] studied the control of impulse maneuvers for each spacecraft to enter their respective positions. Wu et al. [
25] designed a two-impulse control strategy for three spacecraft entering the Sun–Earth Lagrange points
–
by using the Hohmann transfer method, demonstrating the feasibility of a GWO at the Lagrange points [
26]. Amato [
27] investigated the orbital dynamics of LISA’s three spacecraft, revealing the time-varying patterns of their positions and separation distances in elliptical orbits. Pan et al. [
28] proposed an equilateral tetrahedral formation configuration initialization strategy for a space-based GWO near a libration point and calculated the fuel consumption.
To study the initialization of formation configurations, output regulation theory is introduced. The output regulation problem is fundamental in control theory. It covers dynamic trajectory tracking, asymptotic disturbance rejection and output feedback [
29]. It involves designing a feedback controller that ensures a closed-loop system attains stability and regulation [
30]. In this paper, the asymptotic tracking theory is used, referring to the convergence of the system’s state to zero in the absence of external inputs. In the field of spacecraft formation, this theory has been applied to various formation problems, ranging from near-Earth to Lagrange points [
31,
32,
33].
Due to the specific requirements of GWO formation, many researchers have focused solely on near-Earth orbits (“TianQin”), Earth–Sun orbits (“LISA”, “Taiji”, etc.), or Lagrange points
–
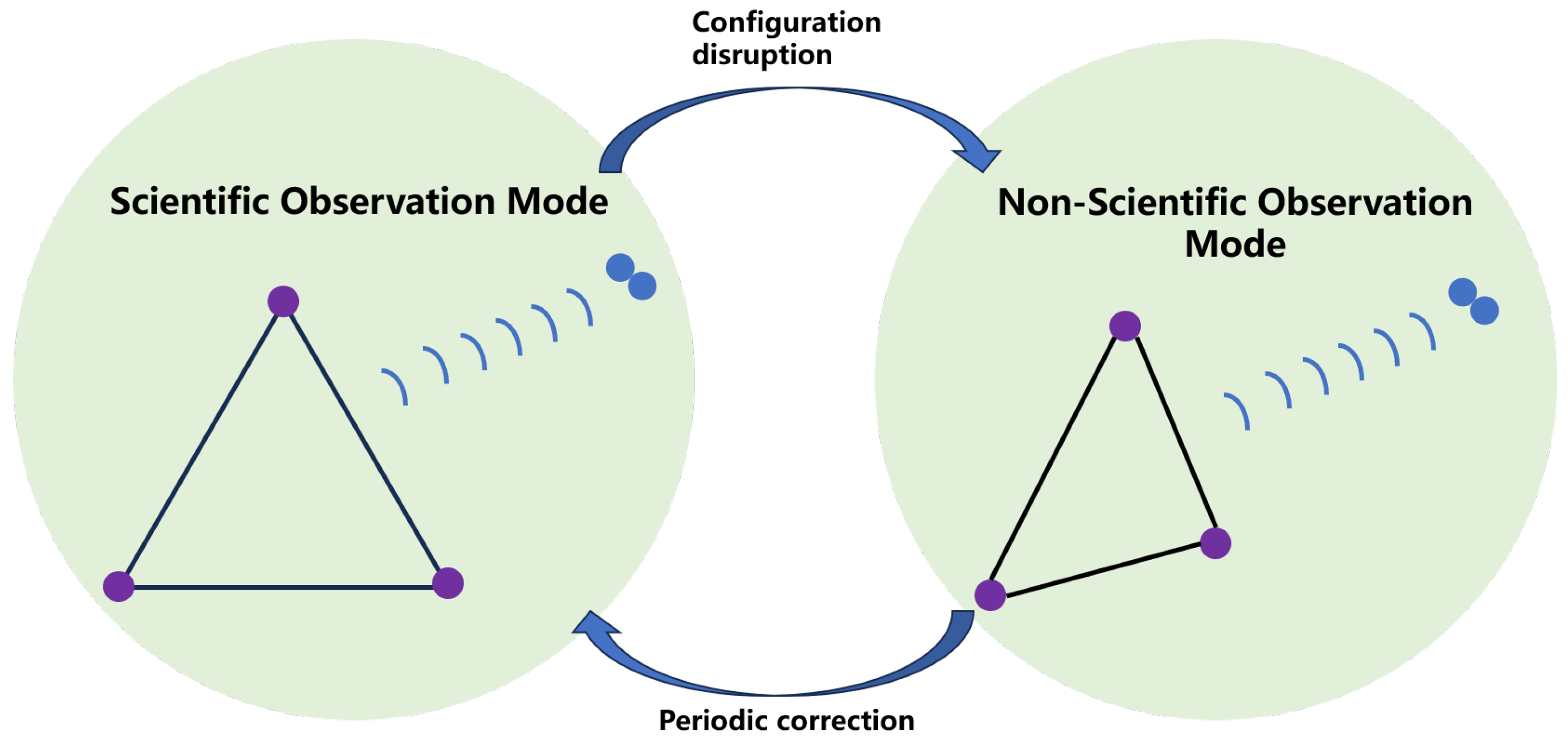
(“ASTROD”), because a natural stable equilateral triangle formation can be established, which significantly limits the flexibility of GWOs. To overcome this limitation, two observation modes are proposed in this paper—the scientific observation mode and the non-scientific observation mode, shown in
Figure 1. In the scientific observation mode, the spacecraft formation maintains a stable triangle configuration, allowing the laser interferometer to precisely measure the relative positions between the spacecraft, enabling the effective observation of GWs. The shape and relative positions of spacecraft formation remain stable, allowing for high-precision measurements of GWs. To maintain this configuration, periodic small-scale orbital adjustments may be needed to counteract disturbances and instability. Regarding the more scientific observation mode, this paper will not go into detail. However, due to the gravitational forces of various celestial bodies, the formation configuration may be disrupted. Therefore, the non-scientific observation mode is introduced, the spacecraft cannot maintain a constant triangle formation. Hence, control forces are applied to adjust the positions of the spacecraft and maintain the effective formation shape. In this mode, the geometric shape of the formation may not always be an equilateral triangle, and precise control ensures that the spacecraft remain in the correct relative orbits, allowing for continuous observation. Although an optimal GWO may not be possible in this mode, the mission can still operate effectively.
In this paper, a new GWO formation configuration near the Sun–Earth Lagrange point is considered in the non-scientific observation mode, based on output regulation theory. An equilateral triangle array formation and equilateral tetrahedral array formation are proposed. The primary objective of this paper is to propose a control strategy for GWO array formation, which can be applied to the Lagrange point. For the equilateral triangle array formation, two design methods are proposed, and the fuel consumption (the -norm of the control input) is calculated. For the equilateral tetrahedral array formation, the trajectory and structure of the formation in space are shown.
2. Output Regulation Theory
In this section, the linear output regulation problem is mentioned. The main objective of solving an output regulation problem is to develop a feedback controller that guarantees both asymptotic tracking and effective disturbance rejection while also maintaining the stability of the closed-loop system. Consider a general system defined as follows:
where
is the state and the initial value,
is deterministic, and all the matrices are
T-periodic;
represents the control input;
is the output to be regulated; and
is an observation available to the controller.
is the signal representing disturbance, and the reference input is modeled by a periodic anti-stable exosystem as follows:
where the initial condition
is assumed to be deterministic. The output regulation problem involves discovering a stabilizing periodic output feedback controller that drives
towards zero, despite the influence of the initial conditions
and
on the state of the system. To obtain the solvability condition for the output regulation problem, the following assumptions on the system and theorem are established.
Assumption 1. For periodic systems, the monodromy matrix is stable, and all its eigenvalues (Floquet multipliers) lie within the unit circle in the complex plane.
Assumption 2. The exosystem is neutrally stable, that is, all the eigenvalues of are simple and on the imaginary axis and have the same algebraic and geometric multiplicity.
Assumption 3. is observable.
Theorem 1. Suppose that Assumption 1 to Assumption 3 hold. Specifically, the solvability of the control problem and the design of controllers that achieve output tracking can be characterized by the output regulator equations [34]. Moreover, the output regulation problem defined by Equation (1) is solvable, if there exist matrices Π and Γ, which solve Equation (3), often called the regulator equation.where denotes the solution of Equation (3). The computation of the regulator in Equation (3) necessitates the use of the matrix . Proof. Given the periodic system (1), where all matrices are
T-periodic, an augmented system will be introduced that incorporates periodicity into the state space. Define the augmented state vector as
where
is the state of the exosystem. The system dynamics can then be rewritten as
The periodic system is reformulated within an extended linear framework characterized by T-periodic matrices, derived from the dynamics of the exosystem. This transformation facilitates the application of regulator equations to effectively solve the output regulation problem.
The goal of output regulation is to design a control input
such that
as
, regardless of the initial disturbances. This requires solving the output regulator equation (Equation (
3)).
Here, maps the disturbance state to the plant state , and determines the control law required to reject disturbances or track references. If the augmented system satisfies Assumptions 1–3, it is controllable and observable, and the output regulator equations have a solution. Therefore, Assumptions 1–3 guarantee the existence of solutions to the regulator equations.
Then, Floquet theory is utilized to analyze the monodromy matrix of the periodic system. When the control input is implemented as a periodic feedback law,
where
is a periodic matrix. In the closed-loop system, the dynamics of the augmented states are expressed:
Floquet theory states that the stability of this periodic system is determined by the monodromy matrix, the state transition matrix over one period T. If all Floquet multipliers (eigenvalues of the monodromy matrix) lie within the unit circle in the complex plane, the system is stable. By appropriately designing , closed-loop system stability is ensured.
Based on Assumption 2, is neutrally stable, with its eigenvalues residing on the imaginary axis and possessing equal algebraic and geometric multiplicities. Under these conditions, the solution can be utilized to design a control law that ensures , enabling the system to achieve both disturbance rejection and reference tracking. □
3. The GWO Array Formation Configuration Design
In this section, the design of the GWO array formation configuration will be introduced in detail, including a comprehensive overview of both the equilateral triangle array formation and equilateral tetrahedral array formation.
3.1. Dynamic Equation
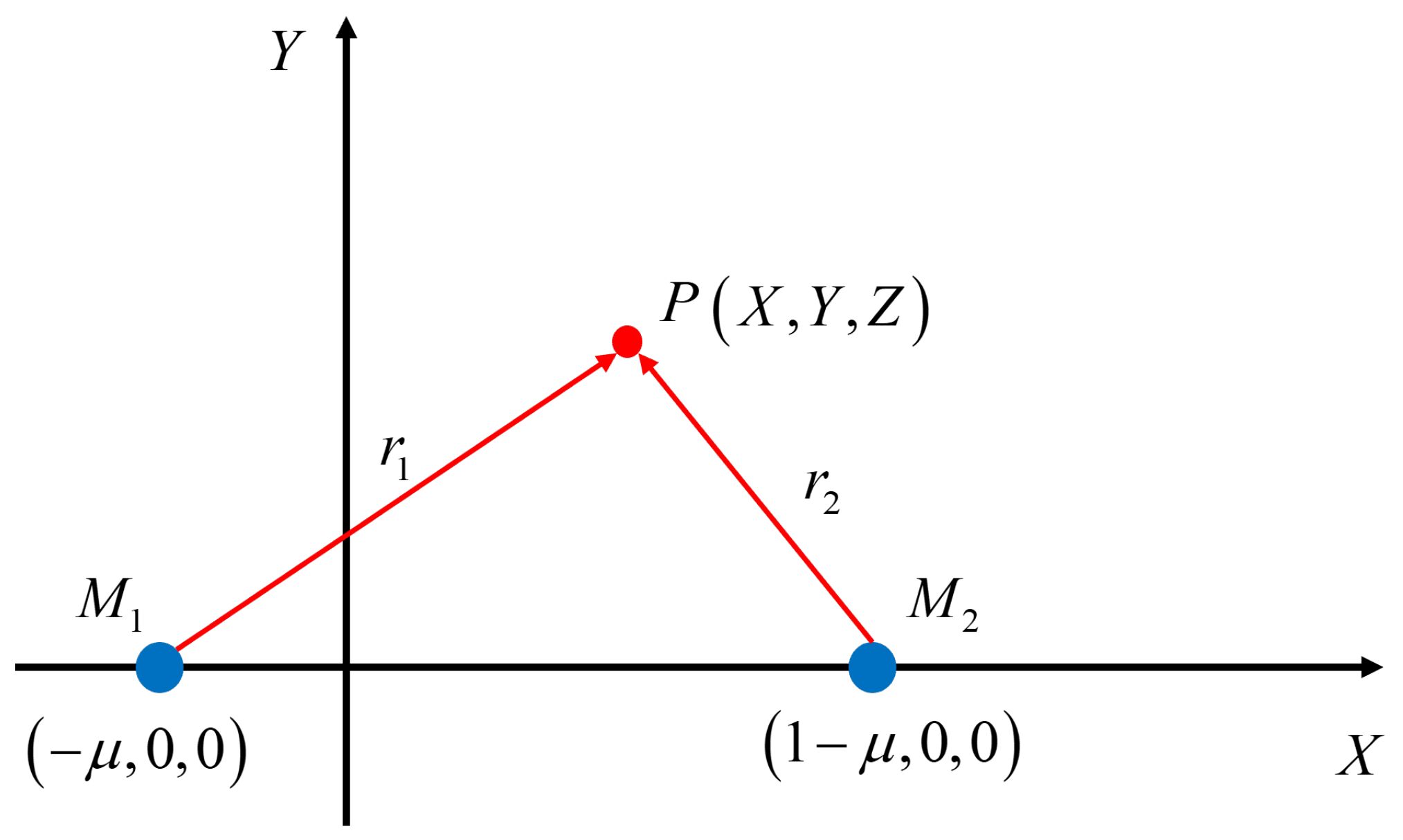
A. Circular restricted three-body problem
The circular restricted three-body problem (CRTBP) elucidates the orbital dynamics of a spacecraft, denoted as
P, influenced by the gravitational forces exerted by two massive celestial bodies,
and
, where
and
are the masses of the Sun and Earth, respectively, as shown in
Figure 2. Suppose that
,
, and
describe the non-dimensional coordinates of the spacecraft, Sun and Earth, respectively. The equations of motion in non-dimensional form are expressed as follows:
where
represents the rotating frame with its origin at the barycenter of the system,
is the control acceleration,
,
, and the distances between spacecraft
and
are, respectively, given by
and
as follows:
Equation (
4) has libration points known as Lagrange points because the equations of motion are normalized.
And the Lagrange points
are expressed as follows,
where the values of
are determined by Equation (
5). To describe the equations of motion near a collinear equilibrium point
, it is convenient to use the coordinate system with its center located at
. Replacing
with
, the equations of motion in the non-dimensional form are given by [
32]
where
,
The linearized equations of motion about the collinear equilibrium points can be given as
where
Next, Equation (
7) can be rewritten in the state space form as
where
Likewise, the state space form of Equation (
6) is semi-linear, and it is expressed as
where
represents the nonlinear components, and is written as
B. Ephemeris model
The CRTBP serves as an essential and effective framework for analyzing trajectories within multi-body dynamical systems, capturing and modeling a wide range of behaviors. However, when dealing with complex scenarios, particularly those involving intricate gravitational interactions or the influence of additional celestial bodies, the CRTBP may fall short. In such cases, a more sophisticated model is necessary that can incorporate higher-fidelity considerations, including perturbations from celestial bodies not accounted for in the standard CRTBP. This enhanced modeling approach allows for more accurate predictions in complex environments.
The ephemeris model distinguishes itself as a higher-fidelity approach to celestial dynamics. In this model, the gravitational influence of multiple celestial bodies (typically denoted as N bodies) affects the motion of each individual celestial body within the system. It provides a more detailed and accurate representation of the complex interactions between celestial bodies. These celestial bodies typically include planets, moons, and other significant objects, along with the spacecraft of interest. By incorporating the gravitational influences of these additional celestial bodies, the ephemeris model allows for more accurate trajectory predictions.
For the design of GWO formation orbits, the Jet Propulsion Laboratory Planetary Ephemerides (JLP) is employed. This model is simplified based on the following considerations:
1. Only three celestial bodies are taken into account—the Sun, Moon, and Earth.
2. To establish the equations of motion for the ephemeris model, the differential equations are expressed within the inertial frame [
35], as shown in
Figure 3a.
where
is the location of the celestial body of interest.
3. The relative formulation of the celestial body equations of motion, describing the movement of the target celestial body with respect to the central celestial body and accounting for the influence of both the central and other perturbing celestial bodies (as shown in
Figure 3b), is given as follows:
where
represents evolution under the influence of other perturbing celestial bodies.
The relative position vector, representing the location of the perturbing celestial bodies relative to the central celestial body, was obtained from NAIF’s SPICE library [
36].
3.2. Formation Configuration Design
In this section, the GWO formation configuration design will be introduced. Traditionally, a GWO formation consists of three spacecraft, and its arm-length constrains the frequency range of the GWO. The noise level of the laser interferometer is very high owing to the extremely weak intensity of GWs; therefore, sensitivity is defined as a critical parameter. Here, additional assumptions are given:
Assumption 4. The change in arm-length caused by GWs is proportional to both the original arm-length and the amplitude and frequency of the GWs.
Assumption 5. The detector’s sensitivity is directly related to the change in arm-length, which is proportional to the nominal arm-length. There exists an optimal nominal arm-length that maximizes the detector’s sensitivity within a specific target frequency band.
Assumption 6. The change in the spacetime metric tensor due to GWs is linear; both smaller and larger GW perturbations cause proportionally smaller or larger changes in arm-length, respectively, with these changes being dependent on the GWs’ strength and frequency.
Based on the above assumptions, the arm-length of the interferometer is denoted as
L. When GWs arrive, depending on the characteristics of the GWs, one arm elongates while the other arm simultaneously contracts in a perpendicular manner. Representing the change in arm-length as
, the two arm-lengths become
and
, respectively. The sensitivity, denoted as
, is defined as
In Equation (
12), since
is much smaller than
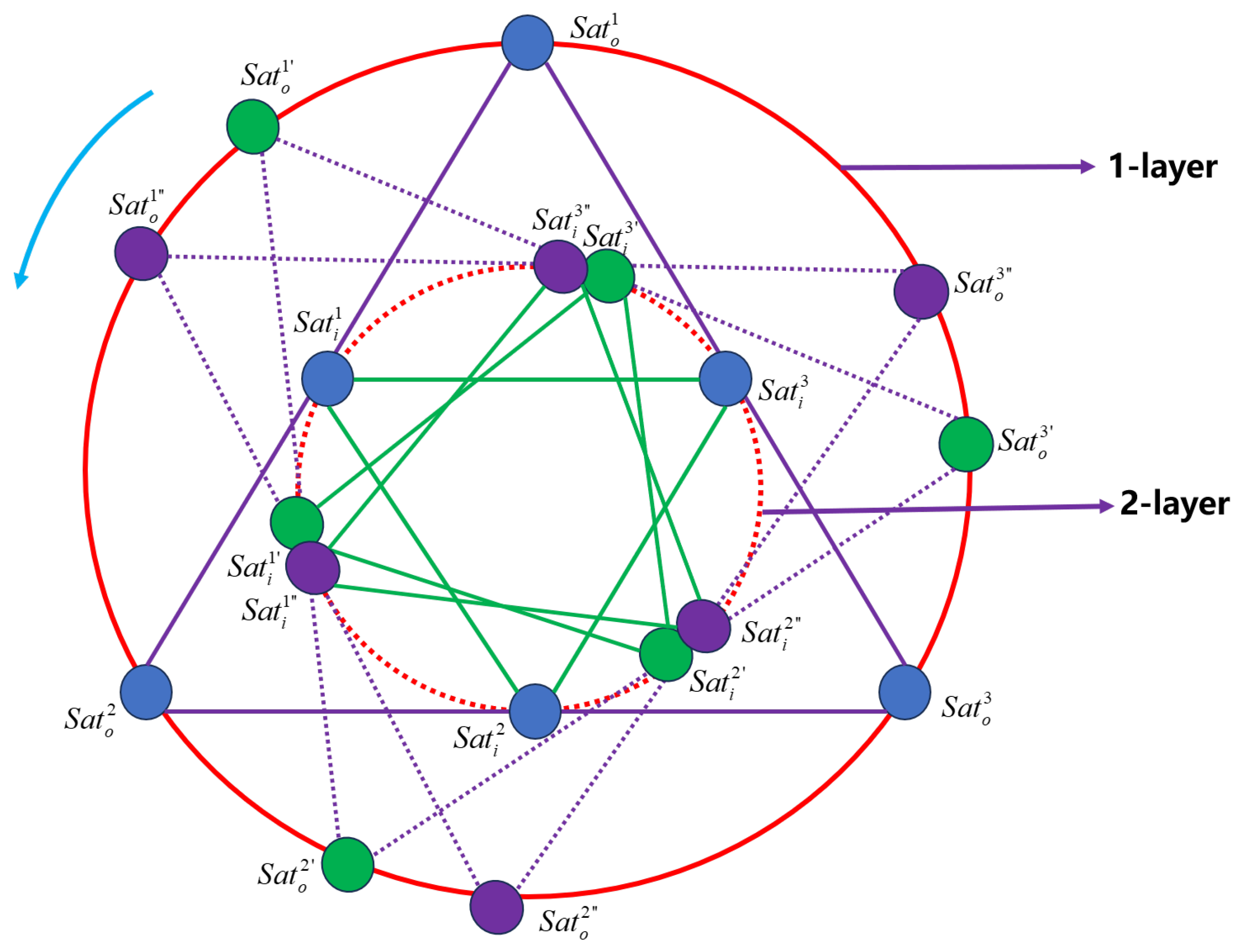
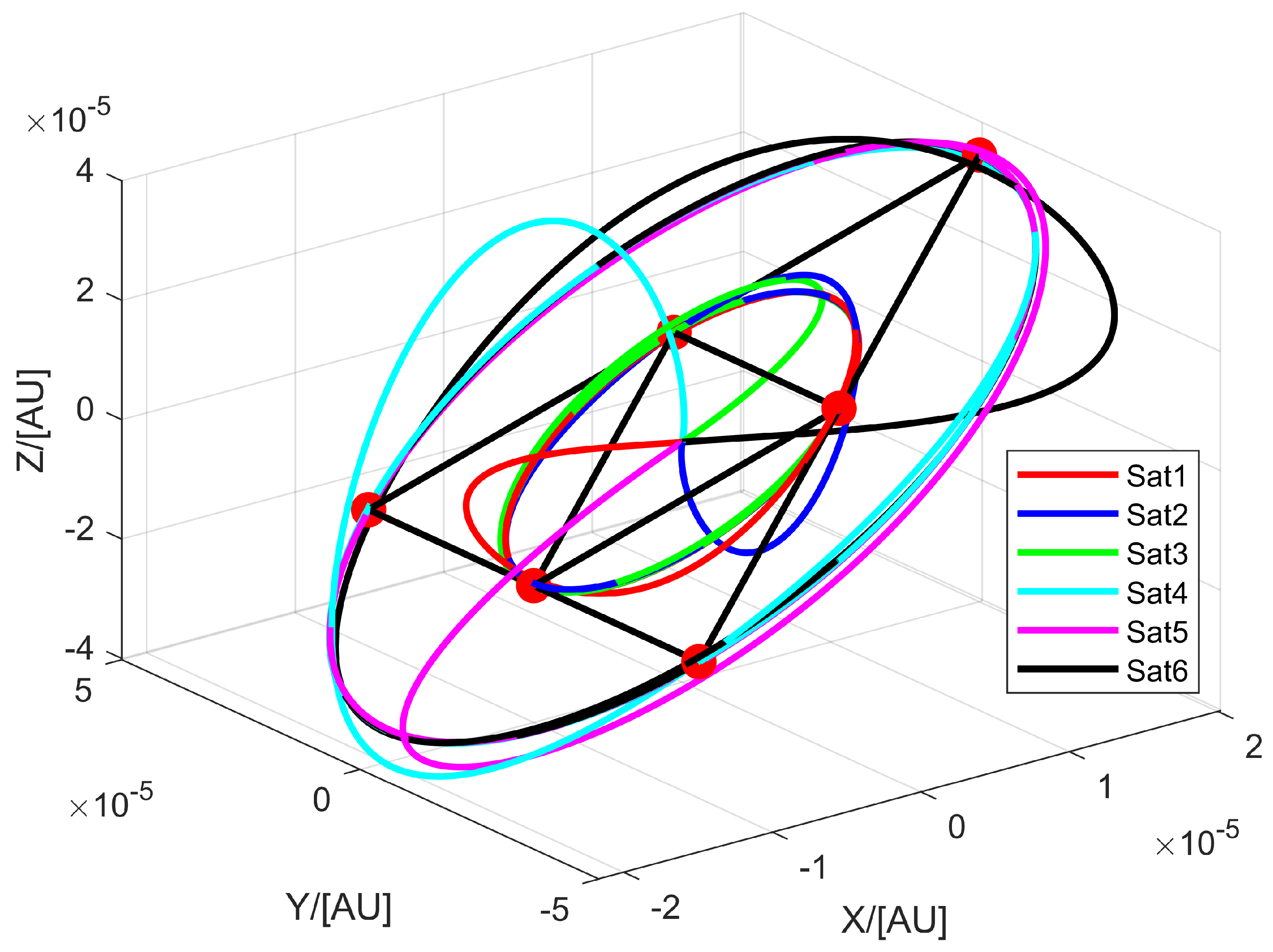
L, the sensitivity decreases as the arm-length increases. To improve sensitivity and mitigate laser attenuation, array formation is proposed. In this paper, the equilateral triangle array formation and equilateral tetrahedral array formation are introduced, as illustrated in
Figure 4 and
Figure 5.
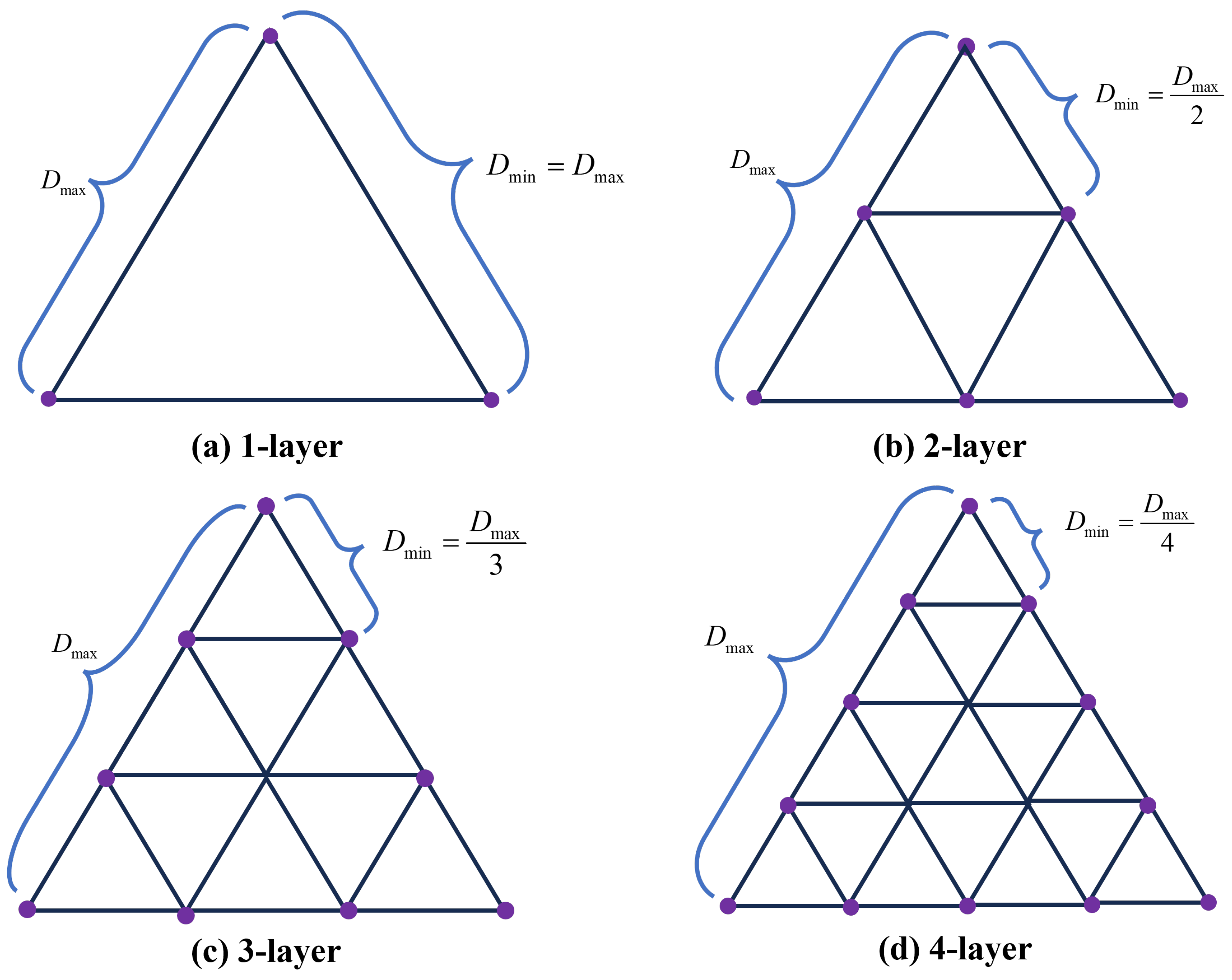
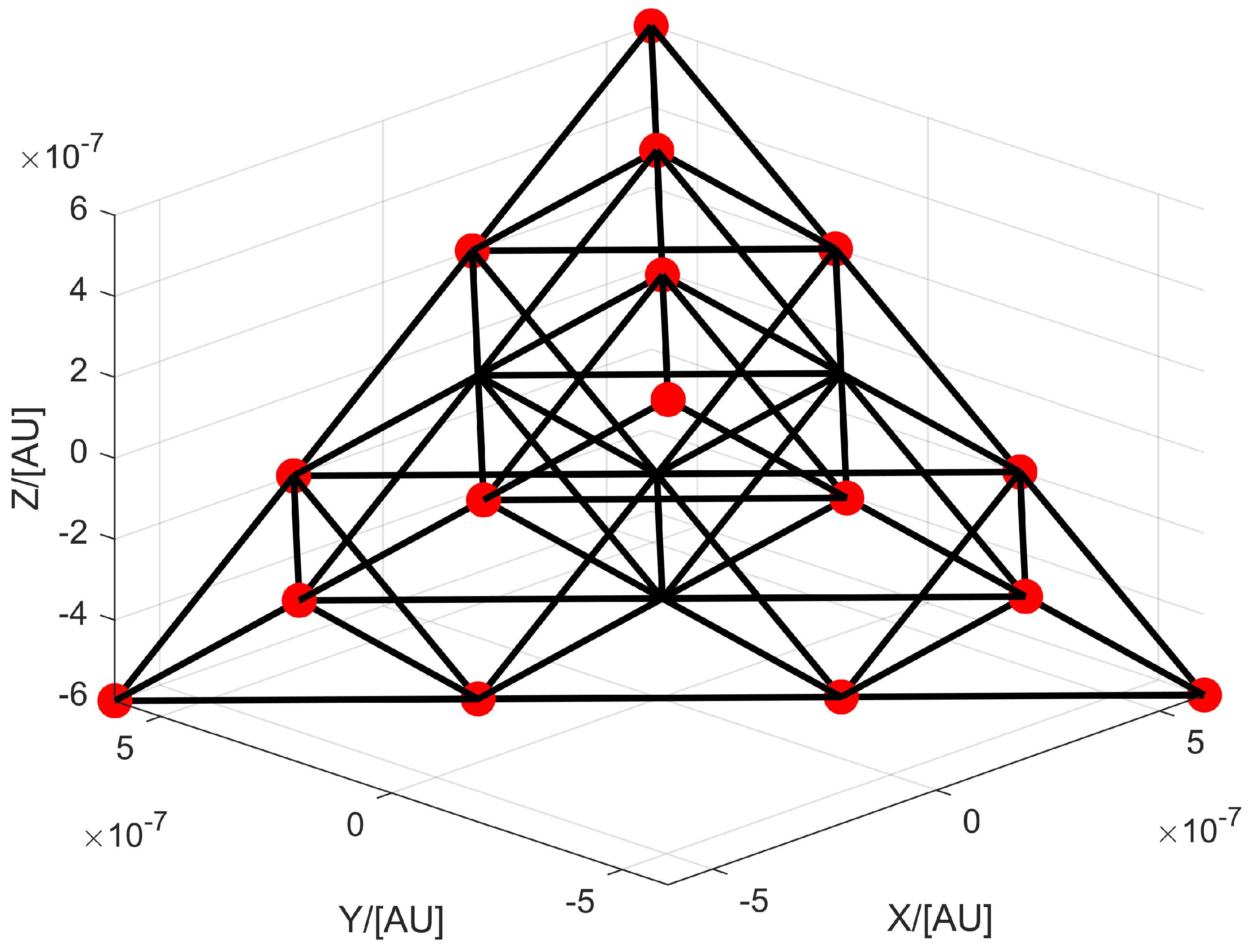
In
Figure 4, a multi-layer equilateral triangle array formation is designed (only two-layer is shown in this figure). Multiple spacecraft are deployed on each side, forming a “nested” configuration. This method effectively mitigates laser attenuation and allows for longer baselines. The spacecraft at the vertices are the chief spacecraft, while the other spacecraft serve as deputy spacecraft. Acting as a “bridge” between the chief spacecraft, the deputy spacecraft can effectively amplify the laser optical path. In
Figure 5, an equilateral tetrahedral array formation is designed, which can effectively observe GWs and avoid configuration/reconfiguration issues when observing GWs in different directions. In addition, this method can enable fixed-point observation of GWs. Redesigning of the optical path is required, in order to change the optical path by adjusting the attitude of the test masses (TMs). Regarding the design of the optical path, this paper will not go into detail.
Next, the two methods will be expressed based on the output regulation theory.
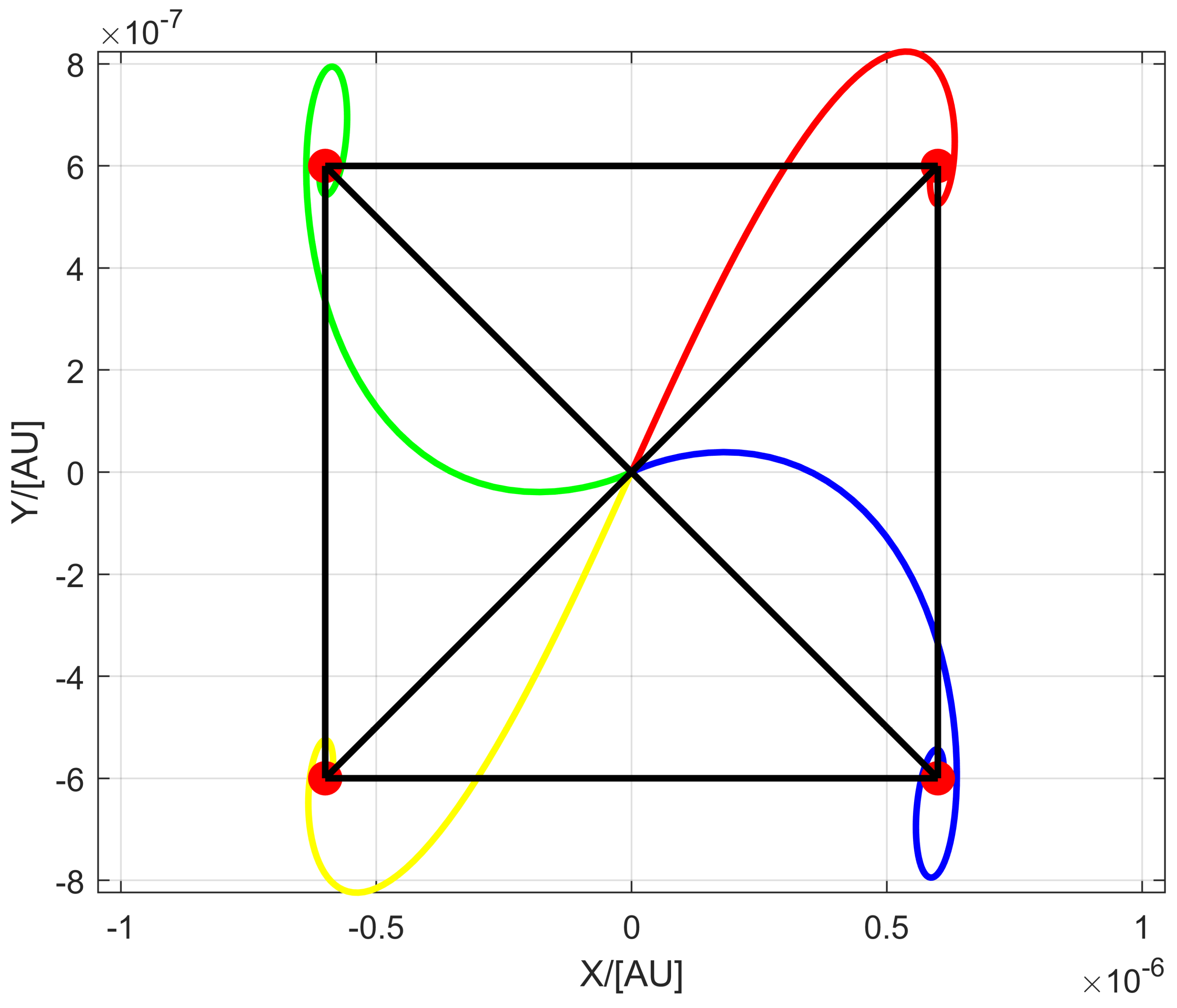
3.2.1. The Equilateral Triangle Array Formation
This part derives the control law to establish and maintain the triangle formation using the output regulation theory. The reference orbit of the deputy spacecraft follows a periodic trajectory modeled through a sinusoidal function, enabling it to complete the equilateral triangle array formation within a given period. Specifically, the triangle array formation in which the chief spacecraft is situated near Lagrange point
, as defined by Equation (
13), is considered. The reference orbit of the deputy spacecraft is represented by
. Here,
represents a periodic relative orbit of the deputy spacecraft.
where
represents a periodic orbit of the chief spacecraft near Lagrange point
. As for the
, it is given by
where
a is the parameter that determines the orbital radius.
Equation (
14) provides a periodic reference orbit. The trajectory (defined by Equation (
14)) is generated as follows:
where
To establish the prescribed formation and maintain it, the output regulation theory needs to be modified. Given the general system (described by Equation (
1)) and exogenous system (described by Equation (
2)), the output regulation problem involves finding a control law such that
converges to zero as time goes to infinity for any initial conditions of the exosystem. In accordance with Assumption and Equation (
3), admissible controllers are expressed as
where
is an arbitrary feedback gain such that
is asymptotically stable. Likewise, the equilateral triangle array formation problem for the semi-linear system can be solved by the nonlinear feedback control given by
where
.
Proof. Substituting the control law (Equation (
17)) into System (9),
Defining the error and differentiating it yields .
Substituting the expressions for
and
,
The error dynamics can now be written as
From the regulator equation,
The term ensures that the regulation error converges to zero, satisfying the output regulation condition. Furthermore, the matrix is designed to be Hurwitz, guaranteeing the asymptotic stability of the error dynamics.
Thus, the control law in Equation (
17) ensures that the error
converges to zero as
, achieving the desired trajectory tracking.
If the full state is available (
), then the regulator equation given by Equation (
3) is reduced to
where
By solving Equation (
18),
and
can be sought as
where
. □
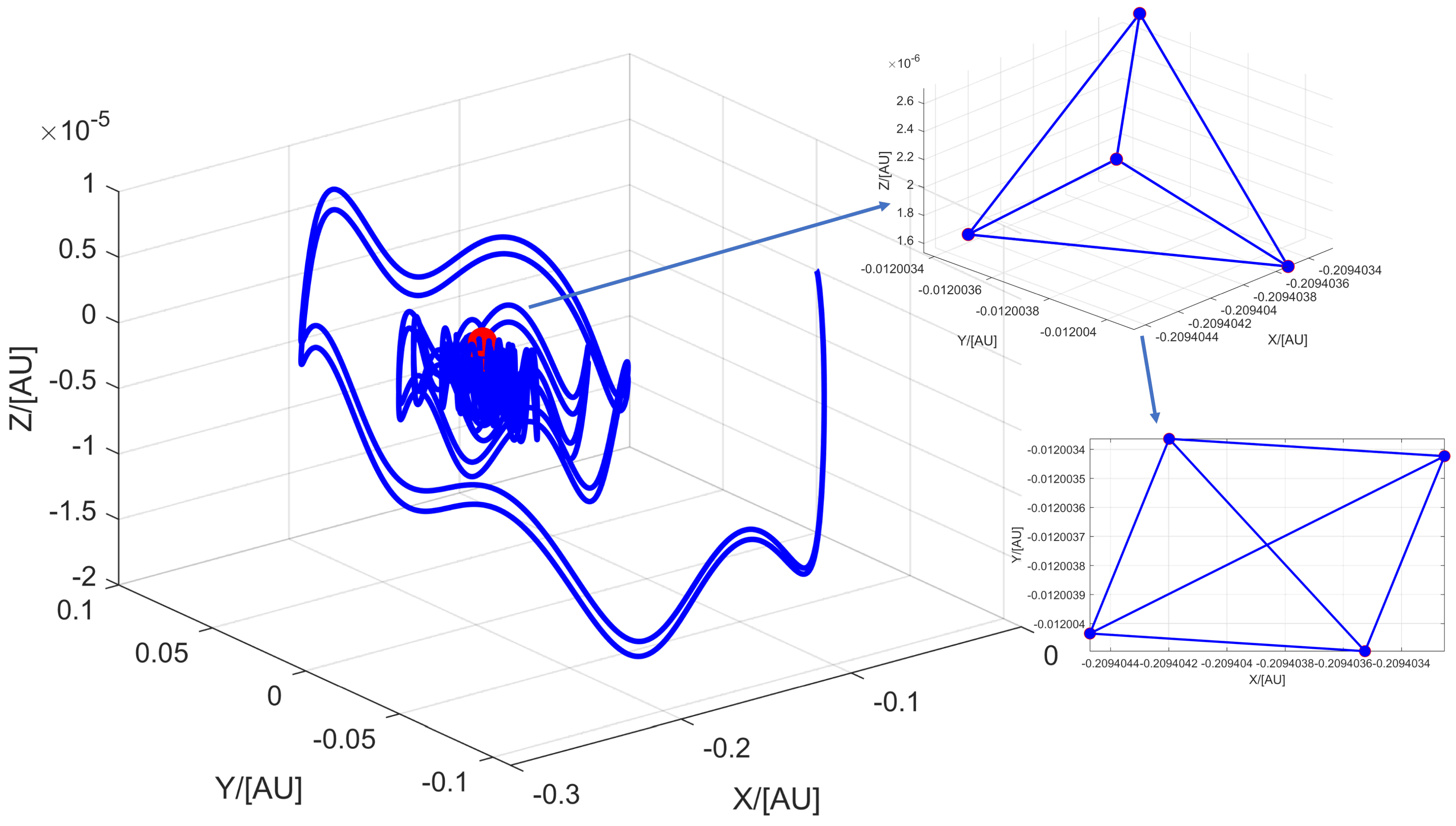
3.2.2. The Equilateral Tetrahedral Array Formation
For the equilateral tetrahedral array formation, the design method is similar to the equilateral triangle array formation, and
is given to implement fixed-point formation.
The solution to the regulator equation is explicitly given by
5. Conclusions
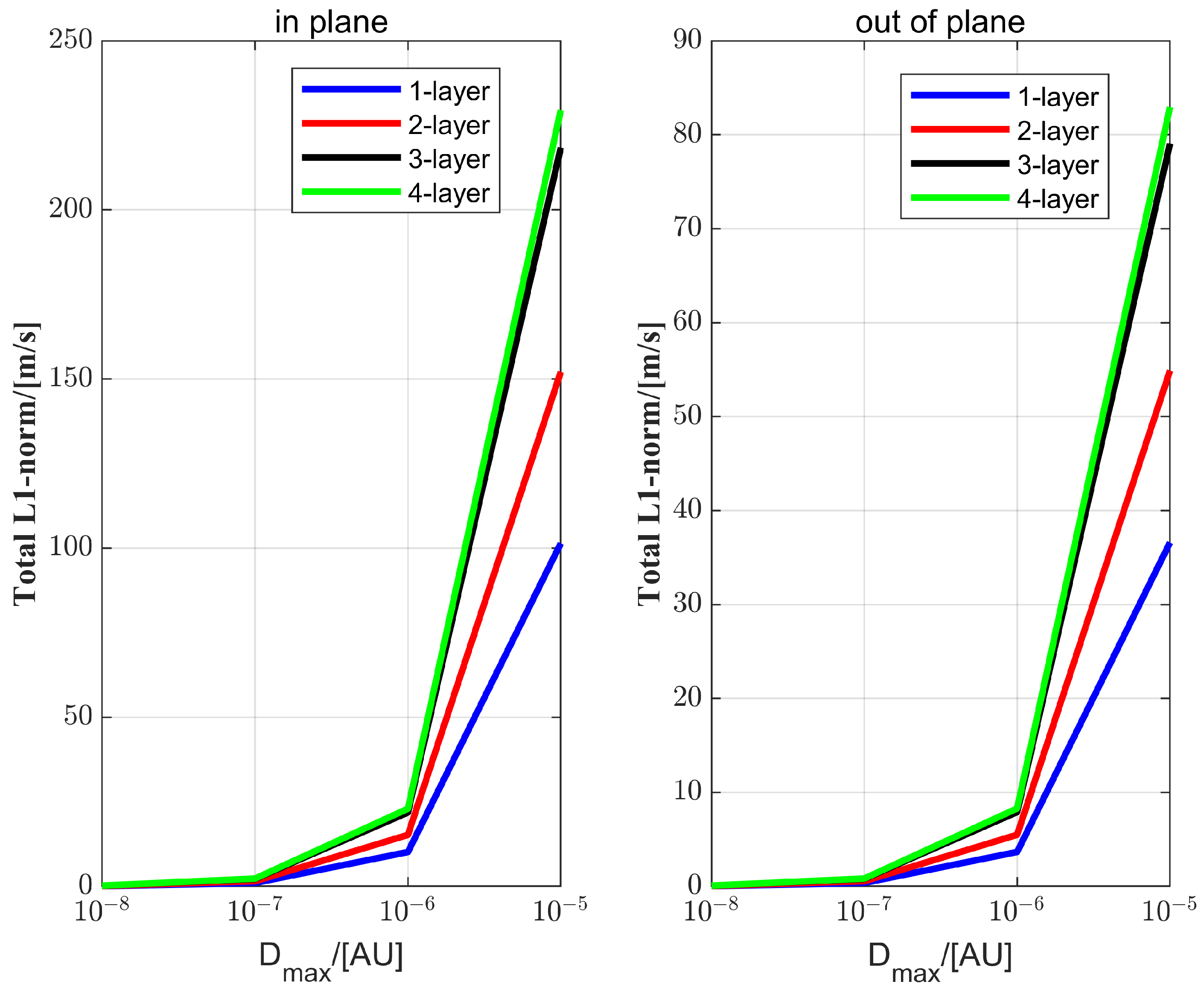
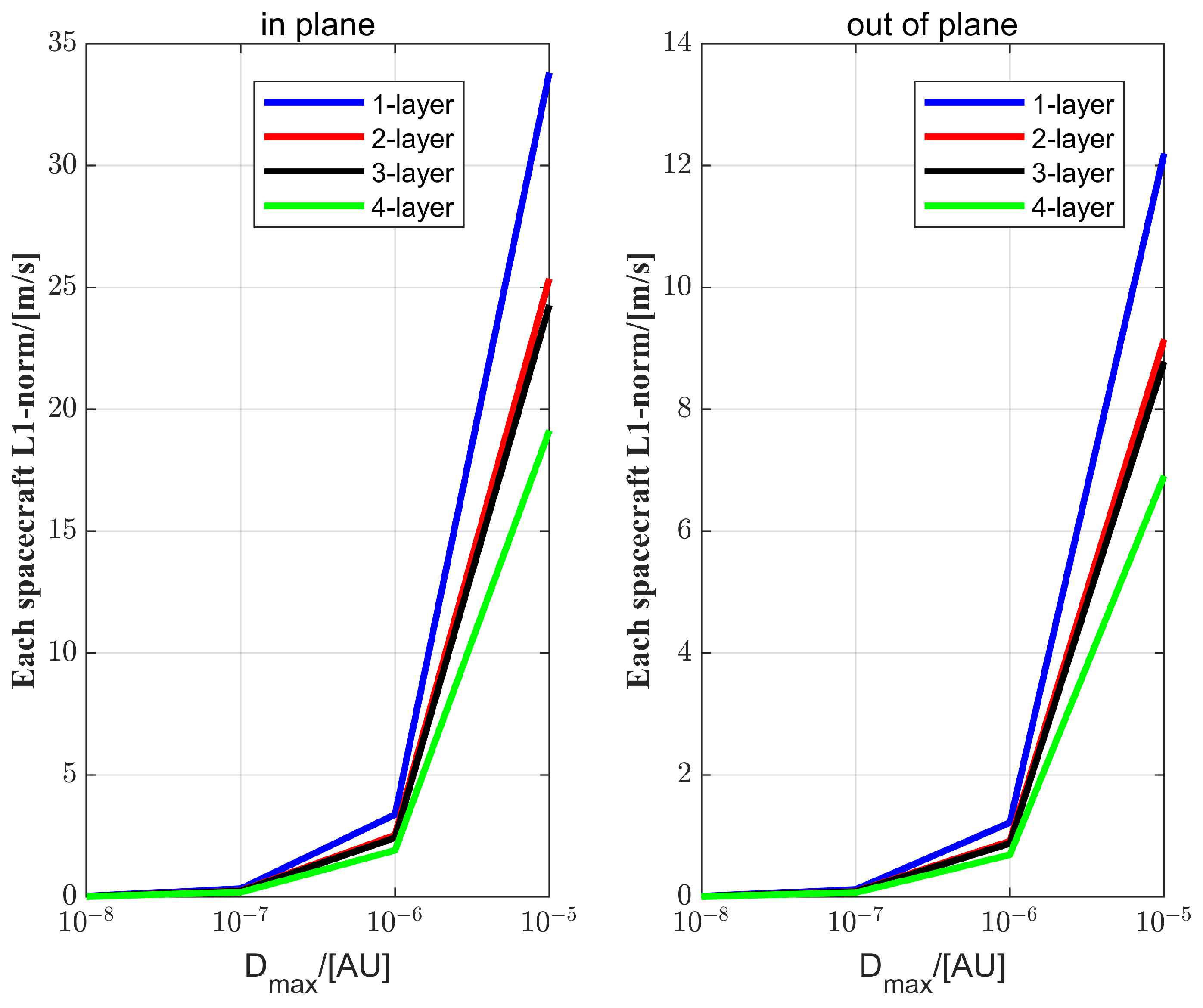
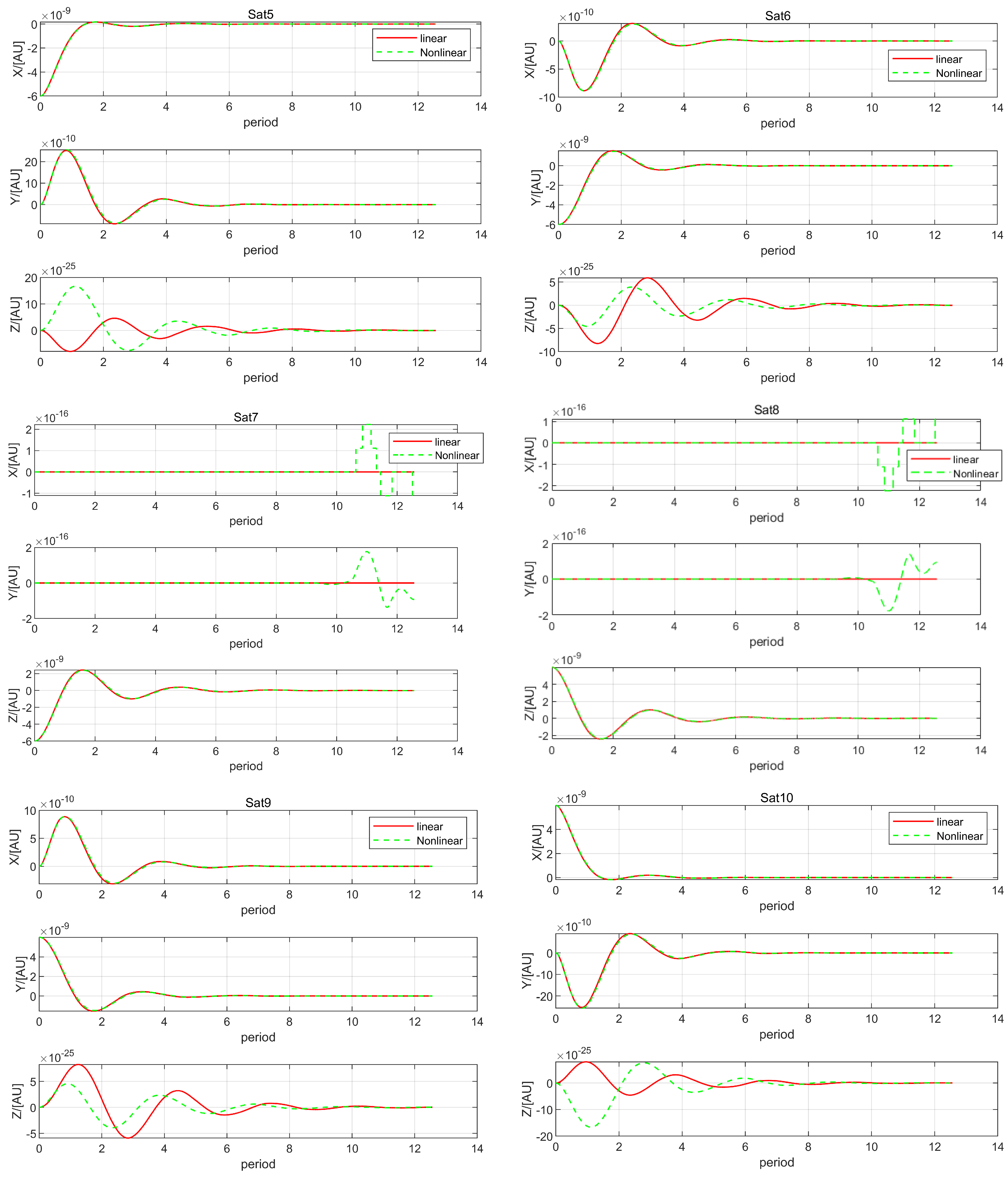
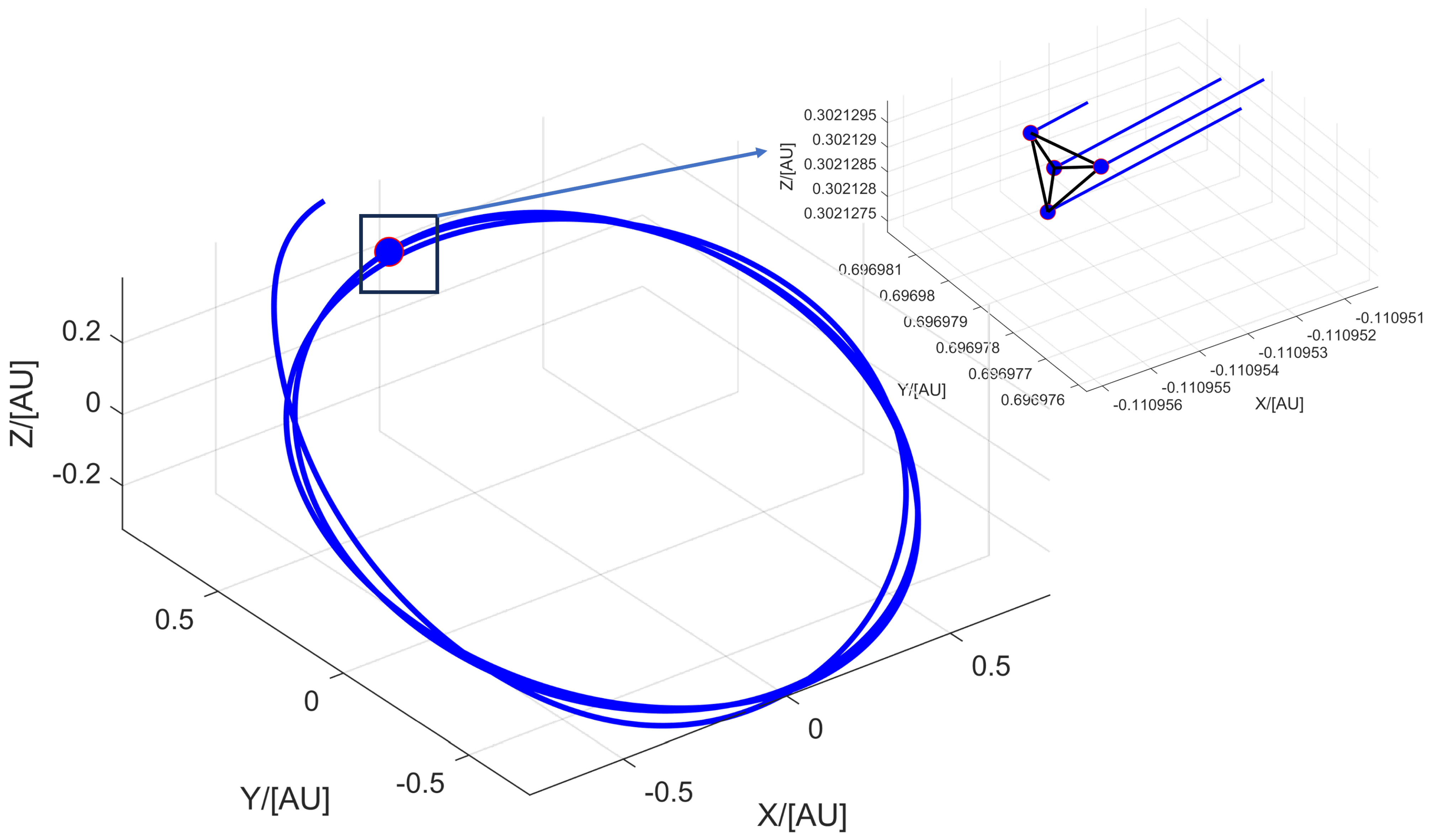
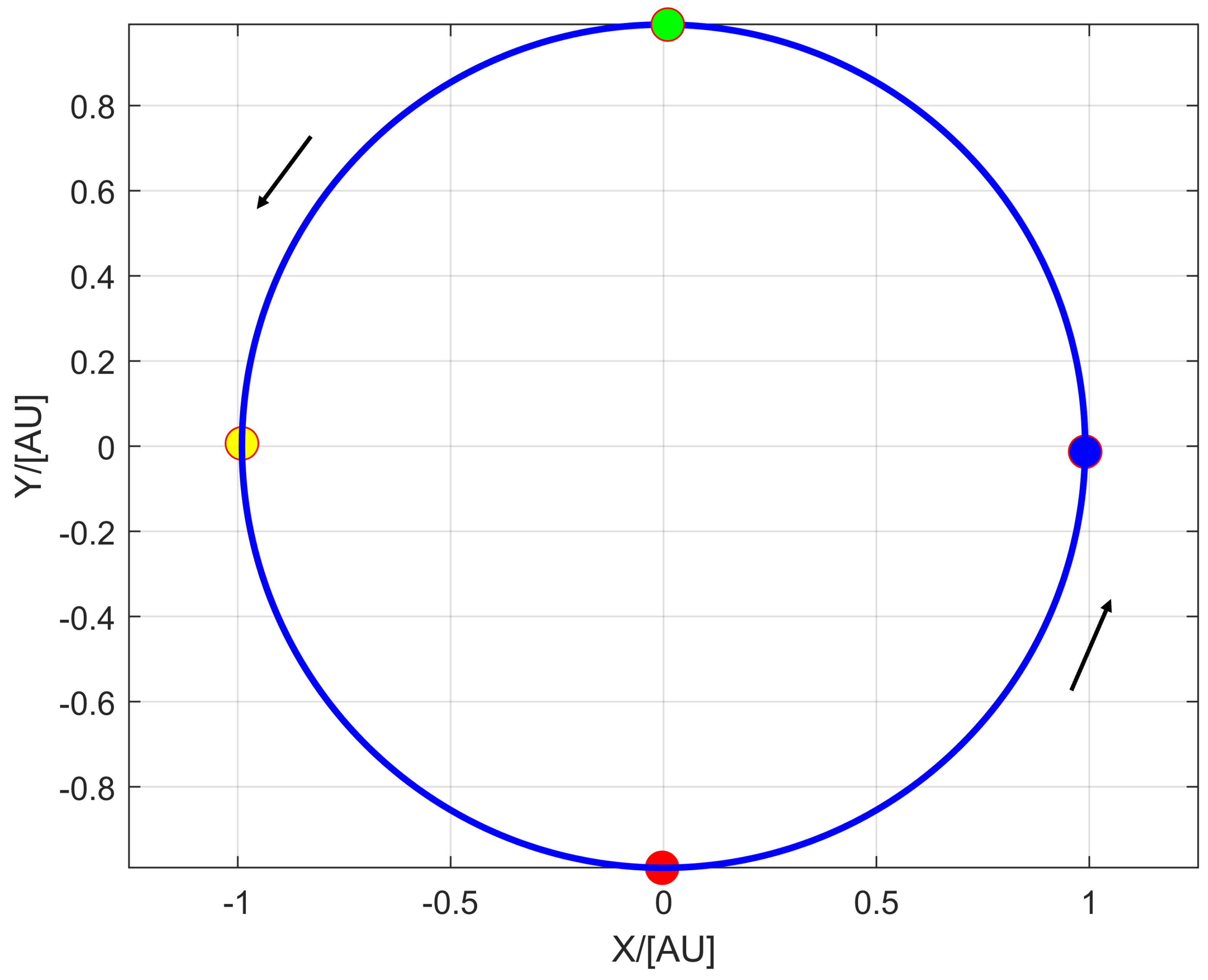
In this paper, to overcome the limitations of GWOs in specific orbits, a scientific observation mode and a non-scientific observation mode were proposed. For the non-scientific observation mode, the equilateral triangle array formation and equilateral tetrahedral array formation near Lagrange point were examined. To establish the array formations and maintain them, the tracking aspect of output regulation theory was employed. For the equilateral triangle array formation, the reference orbit was given by an exosystem. One-layer, two-layer, and three-layer triangle array formations were established and maintained. Simultaneously, the errors were reduced to zero through the control law, demonstrating the effectiveness of the control method. Next, the inner-edge length and the outer-edge length were fixed, and the formation fuel consumption was calculated. To observe GWs in different directions and avoid configuration/reconfiguration, the equilateral tetrahedral array formation was designed. The equilateral tetrahedral array formation was a fixed-point formation centered on Lagrange point . To demonstrate the operation of the equilateral tetrahedral array formation, the trajectory of the array formation was given in the inertial frame in the ephemeris model. To show the configuration of the equilateral tetrahedral array formation, the configuration was given in a rotating frame in the ephemeris model, and it was well maintained by the control method.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}