
Numerical Investigation of Unsteady Characteristics of Gas Foil Journal Bearings with Fluid–Structure Interaction

Abstract
1. Introduction
2. Computational Methodology
2.1. Physical Model
2.2. Solution Domain and Computational Grid
2.3. Boundary Conditions
2.4. Fluid–Structure Interaction
2.4.1. CFD Solver
2.4.2. CSD Solver
2.4.3. Fluid–Structure Interaction
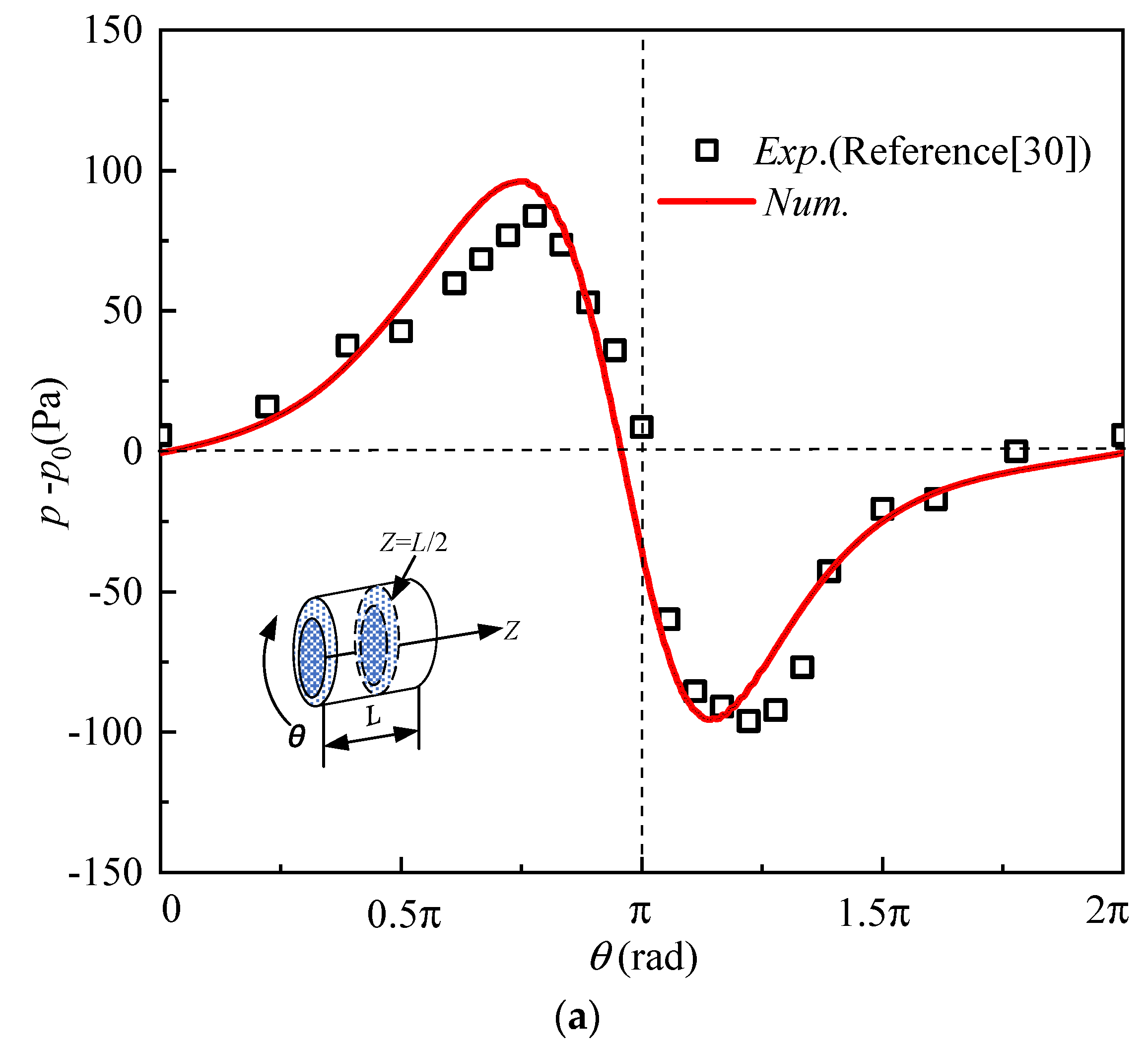
2.5. Validation and Data Reduction
3. Result and Discussion
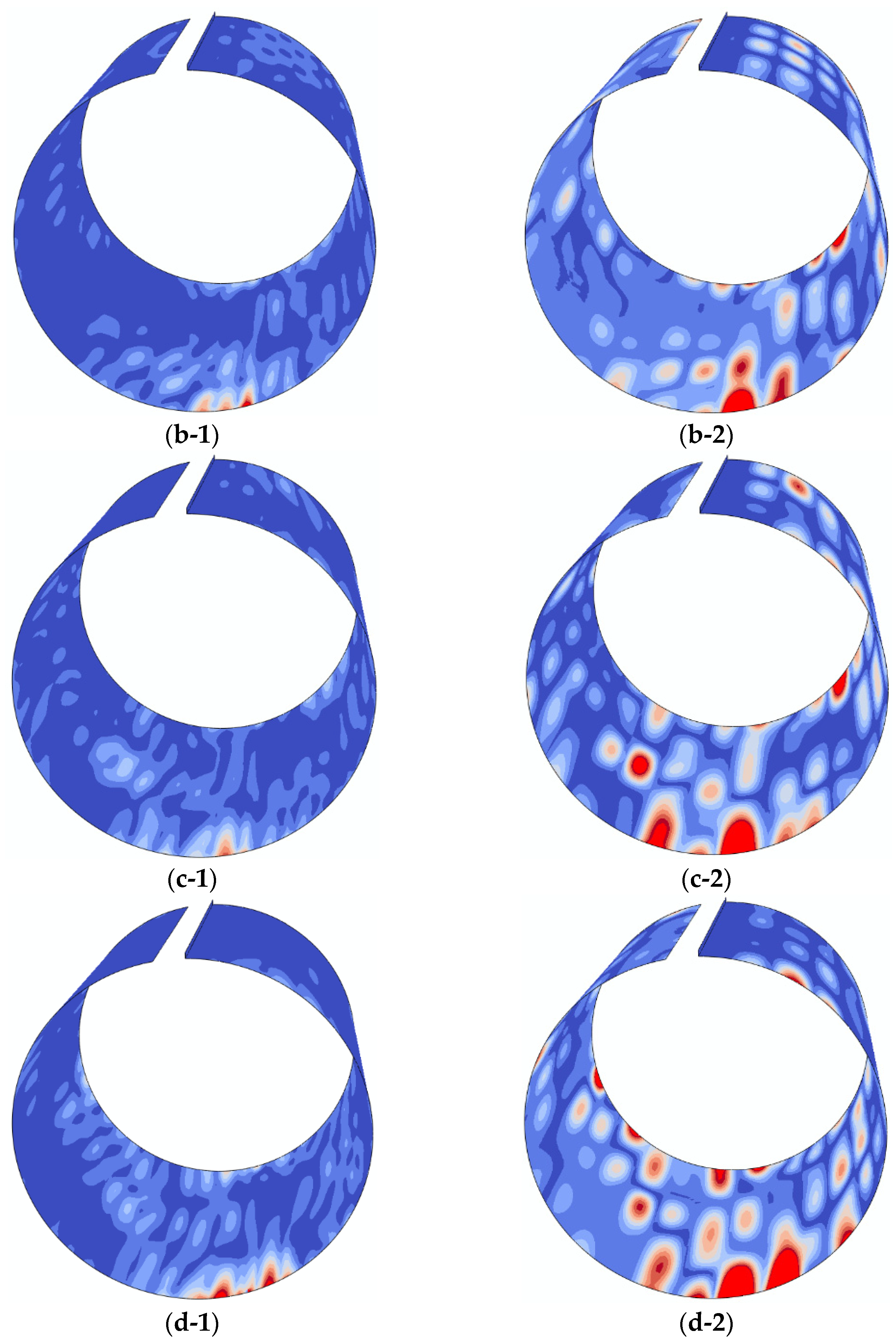
3.1. Flow Field in the Gas Film
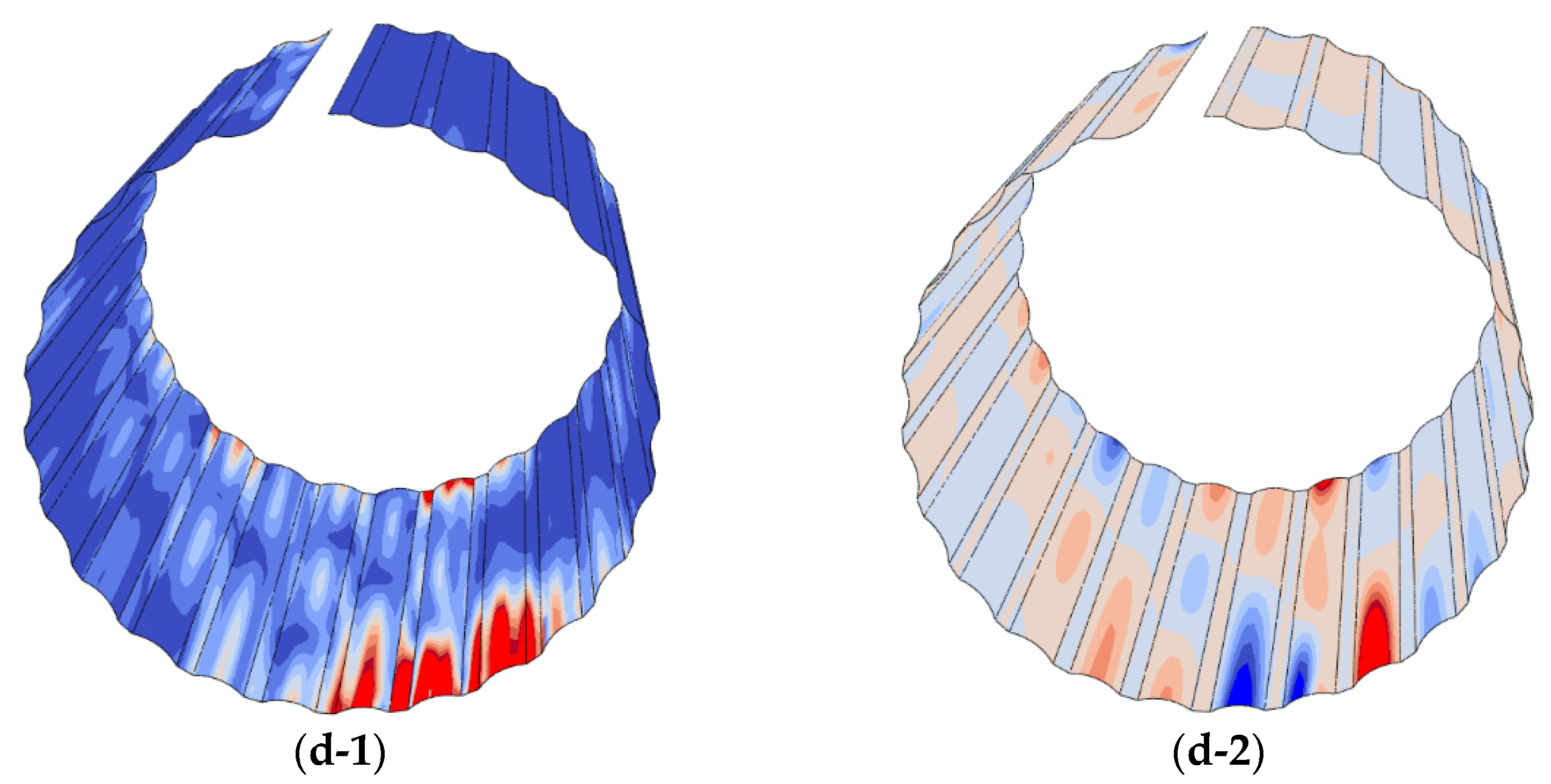
3.2. Solid Field of Foils
3.3. Comparison of with and without FSI
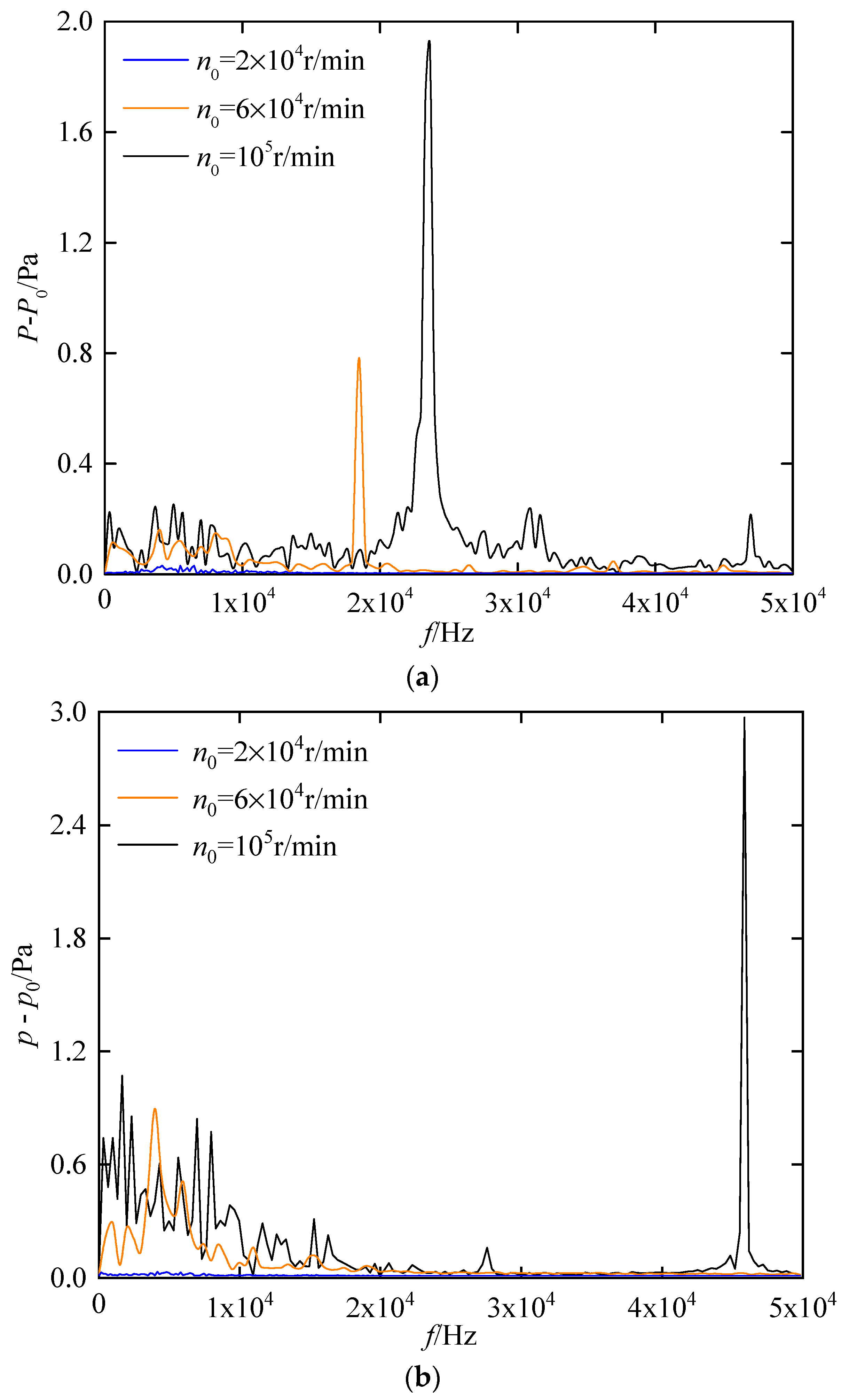
3.4. Influence of the Rotational Speed
3.4.1. Fluid Domain
3.4.2. Solid Domain
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| b | Ramp extent ratio |
| [C] | damping matrix |
| Cp | specific heat capacity (J/(kg·K)) |
| D | cell distance from the wall (mm) |
| E0 | Young’s modulus (GPa) |
| E | total energy |
| e | eccentricity |
| F | bearing load capacity (N) |
| {F} | aerodynamic force matrix |
| h | thickness of the gas film (μm) |
| h1 | maximum thickness of the gas film (μm) |
| h2 | minimum thickness of the gas film (μm) |
| [K] | stiffness matrix |
| k | turbulent kinetic energy (m2/s2) |
| keff | effective thermal conductivity |
| L | Length of bearing (mm) |
| [M] | mass matrix |
| n | unit outward normal vector |
| n0 | rotational speed (r/min) |
| j | waypoint index |
| K | trailing-edge nondimensional angular deflection rate |
| l | half of span of bump element (mm) |
| Prt | turbulent Prandtl number |
| p | pressure (Pa) |
| p0 | pressure of environment (Pa) |
| r | radial coordinate |
| r1 | minimum radial position of thickness (mm) |
| r2 | maximum radial position of thickness (mm) |
| R | rotator radius (mm) |
| R′ | stator radius (mm) |
| R1 | inner radius (mm) |
| R2 | outer radius (mm) |
| s | thickness of orifice plate (m) |
| S | strain tensors |
| T | temperature (K) |
| t | time (s) |
| tt | Thickness of top foil (μm) |
| tb | Thickness of bump foil (μm) |
| u | fluid velocity (m/s) |
| U | total displacement (mm) |
| U1 | radial displacement (mm) |
| radial displacement | |
| V | cell volume |
| {x} | the displacement vector |
| y+ | dimensionless height of the first layer |
| z | coordinate across film thickness |
| Greek Letters | |
| ρ | density (kg/m3) |
| θ | angular coordinate |
| β | top foil opening angle |
| μ | dynamic viscosity (Pa·s) |
| μt | turbulent dynamic viscosity (Pa·s) |
| σ | stress tensor |
| δ | Kronecker delta |
| Δ | length scale |
| κ | von Karman constant |
| Subscripts | |
| b | bump |
| f | fluid |
| s | structure |
| t | top |
References
- Samanta, P.; Murmu, N.; Khonsari, M. The evolution of foil bearing technology. Tribol. Int. 2019, 135, 305–323. [Google Scholar] [CrossRef]
- Dellacorte, C. Oil-Free shaft support system rotor dynamics: Past, present and future challenges and opportunities. Mech. Syst. Signal Process. 2012, 29, 67–76. [Google Scholar] [CrossRef]
- Khonsari, P. On the limiting load-carrying capacity of foil bearings. J. Tribol. 2004, 126, 817–818. [Google Scholar]
- Bensouilah, H.; Lahmar, M.; Bou-Said, B. Elasto-aerodynamic lubrication analysis of a self-acting air foil journal bearing. Lubr. Sci. 2012, 24, 95–128. [Google Scholar] [CrossRef]
- Xu, H.; Liu, Z.; Zhang, G. Design and experiment of oil lubricated five-leaf foil bearing test-bed. J. Eng. Gas Turbines Power 2009, 131, 054505. [Google Scholar] [CrossRef]
- Hosain, M.; Fdhila, R.; Ronnberg, K. Taylor-Couette flow and transient heat transfer inside the annulus air-gap of rotating electrical machines. Appl. Energ. 2017, 207, 624–633. [Google Scholar] [CrossRef]
- Petrolo, D.; Longo, S. Buoyancy transfer in a two-layer system in steady state. Exp. A Taylor-Couette Cell. J. Fluid Mech. 2020, 8, 31–52. [Google Scholar]
- Peng, Z.; Khonsari, M. Thermohydrodynamic Analysis of Foil Journal Bearings. J. Tribol. 2006, 128, 534–541. [Google Scholar] [CrossRef]
- Liu, X.; Li, C.; Du, J.; Nan, G. Thermal characteristics study of the bump foil thrust gas bearing. Appl. Sci. 2021, 11, 4311. [Google Scholar] [CrossRef]
- Luo, Y.; Zhang, J. Analysis of gas film thermal characteristics of gas thrust bearing. Mach. Build. Autom. 2019, 48, 5–25. [Google Scholar]
- Hu, L.; Zhang, G.; Liu, Z. Performance analysis of multi-leaf oil lubricated foil bearing. J. Eng. Tribol. 2013, 227, 962–979. [Google Scholar] [CrossRef]
- Paghdar, D.; Jogee, S.; Anupindi, K. Large-eddy simulation of counter-rotating Taylor-Couette flow: The effects of angular velocity and eccentricity. Int. J. Heat Fluid Flow 2019, 81, 108514. [Google Scholar] [CrossRef]
- Wei, T. Properties of the mean momentum balance in turbulent Taylor-Couette flow. J. Fluid Mech. 2020, 891, A10. [Google Scholar] [CrossRef]
- Sytin, A.; Rodichev, A.; Babin, A. Experimental study of foil gas-dynamic bearing elastic elements deformation. Procedia Eng. 2017, 206, 334–339. [Google Scholar] [CrossRef]
- Arakere, N.; Nelson, H. An analysis of gas-lubricated foil-journal bearings. Tribol. Trans. 1992, 35, 1–10. [Google Scholar] [CrossRef]
- Lee, D.; Kim, Y.; Kim, K. The effect of coulomb friction on the static performance of foil journal bearings. Tribol. Int. 2010, 43, 1065–1072. [Google Scholar] [CrossRef]
- Liu, J.; Du, F. Simulation of compliant bump foil journal bearing using coupled Reynolds equation and finite element model method. Adv. Mater. Res. 2012, 479, 2499–2503. [Google Scholar] [CrossRef]
- Barzem, L.; Bou-Said, B.; Rocchi, J. Aeroelastic bearing effects on rotor dynamics: A numerical analysis. Lubr. Sci. 2013, 25, 463–478. [Google Scholar] [CrossRef]
- Feng, K.; Liu, L.; Guo, Z.; Zhao, X. Parametric study on static and dynamic characteristics of bump-type gas foil Thrust bearing for oil-free turbomachinery. J. Eng. Tribol. 2016, 230, 944–961. [Google Scholar]
- Żywica, G.; Bagiński, P.; Andrearczyk, A. Experimental research on gas foil bearings with polymer coating at an elevated temperature. Tribologia 2016, 267, 217–227. [Google Scholar] [CrossRef]
- Zywica, G.; Baginski, P.; Bogulicz, M. Experimental and numerical evaluation of the damping properties of a foil bearing structure taking into account the static and kinetic dry friction. J. Braz. Soc. Mech. Sci. Eng. 2021, 43, 7. [Google Scholar] [CrossRef]
- Balducchi, F.; Arghir, M.; Gauthier, R. Experimental analysis of the dynamic characteristics of a foil thrust bearing. J. Tribol. 2015, 137, 021703. [Google Scholar]
- Pronobis, T.; Ramin, A.; Liebich, R. Numerical study on the influence of gas foil Thrust bearings on the vibrational behavior. In IFToMM 2018: Proceedings of the 10th International Conference on Rotor Dynamics, Rio de Janeiro, Brazil, 23–27 September 2018; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Zhou, Y.; Shao, L.; Zhang, C. Numerical and experimental investigation on dynamic performance of bump foil journal bearing based on journal orbit. Chin. J. Aeronaut. 2021, 34, 586–600. [Google Scholar] [CrossRef]
- Kyuho, S.; Yong-Bok, A. Identification of the dynamic performance of a gas foil journal bearing operating at high temperatures. J. Mech. Sci. Technol. 2014, 28, 43–51. [Google Scholar]
- Khonsari, P. Hydrodynamic analysis of compliant foil bearings with compressible air flow. J. Tribol. 2004, 126, 542–546. [Google Scholar]
- Guo, Z.; Feng, K.; Liu, T. Nonlinear dynamic analysis of rigid rotor supported by gas foil bearings: Effects of gas film and foil structure on subsynchronous vibrations. Mech. Syst. Signal Process. 2018, 107, 549–566. [Google Scholar] [CrossRef]
- Hoffmann, R.; Liebich, R. Characterization and calculation of nonlinear vibrations in gas foil bearing systems-An experimental and numerical investigation. J. Sound Vib. 2018, 412, 389–409. [Google Scholar]
- Kan, Q.; Jacobs, P.; Keep, J.A. A fluid-structure-thermal model for bump-type foil thrust bearings. Tribol. Int. 2018, 121, 481–491. [Google Scholar]
- Fatu, A.; Arghir, M. Numerical analysis of the impact of manufacturing errors on the structural stiffness of foil bearings. J. Eng. Gas Turbines Power 2018, 140, 041506. [Google Scholar] [CrossRef]
- Hou, Y.; Ma, B.; Yang, S. Experimental study on bump-foil gas bearing with different diametric clearance configurations. J. Mech. Sci. Technol. 2015, 29, 2089–2095. [Google Scholar] [CrossRef]
- Hou, Y.; Zheng, Y.; Chen, S. The numerical study of static and dynamic characteristics of multi-layer protuberant foil bearing. J. Adv. Mech. Des. Syst. Manuf. 2015, 9, 58–64. [Google Scholar] [CrossRef]
- Christopher, M.; Valco, V. Load capacity estimation of foil air journal bearings for oil-free turbomachinery applications. Tribol. Trans. 2000, 43, 774–780. [Google Scholar]
- Bou-Saïd, B.; Lahmar, M.; Mouassa, A.; Bouchehit, B. Dynamic performances of foil bearing supporting a jeffcot flexible rotor system using FEM. Lubricants 2020, 8, 14. [Google Scholar] [CrossRef]
- Wang, C.; Chen, C. Bifurcation analysis of self-acting gas journal bearings. J. Tribol. 2001, 123, 755–767. [Google Scholar] [CrossRef]
- Kim, D.; Nicholson, B.; Rosado, L. Rotordynamics performance of hybrid foil bearing under forced vibration input. J. Eng. Gas Turbines Power 2018, 140, 012507. [Google Scholar] [CrossRef]
- Lehn, A.; Mahner, M.; Schweizer, B. Characterization of static air foil thrust bearing performance: An elasto-gasdynamic analysis for aligned, distorted and misaligned operating conditions. Arch. Appl. Mech. 2018, 88, 705–728. [Google Scholar] [CrossRef]
- Nicoud, F.; Toda, H.; Cabrit, O. Using singular values to build a subgrid-scale model for large eddy simulations. Phys. Fluids 2011, 23, 085106. [Google Scholar] [CrossRef]
- Foss, J.; Zaman, K. Large-and small-scale vortical motions in a shear layer perturbed by tabs. J. Fluid Mech. 1999, 382, 307–329. [Google Scholar] [CrossRef]
- Stickan, B.; Dillinger, J.; Schewe, G. Computational aeroelastic investigation of a transonic limit-cycle-oscillation experiment at a transport aircraft wing model. J. Fluids Struct. 2014, 49, 223–241. [Google Scholar] [CrossRef]
- Jaiman, R.; Geubelle, P.; Loth, E. Transient fluid–structure interaction with non-matching spatial and temporal discretizations. Comput. Fluids 2011, 50, 120–135. [Google Scholar] [CrossRef]
- Ruscitto, D.; Mc Cormick, J.; Gray, S. Hydrodynamic Air Lubricated Compliant Surface Bearing for an Automotive Gas Turbine Engine Journal Bearing Performance: NASA-CR-135368; NASA Technical Report; Mechanical Technology Incorporated: Latham, NY, USA, 1978. [Google Scholar]
- Kim, A. Analysis of Gas Foil Bearings Integrating FE Top Foil Models. Tribol. Int. 2008, 42, 111–120. [Google Scholar]
- Breńkacz, L.; Bagiński, P.; Żywica, G. Experimental research on foil vibrations in a gas foil bearing carried out using an ultra-high-speed camera. Appl. Sci. 2021, 11, 878. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Unit | Scale |
|---|---|---|
| Radius of rotator | R/mm | 19.05 |
| Radius of stator | R′/mm | 19.25 |
| Length of bearing | L/mm | 38.1 |
| Thickness of top foil | tt/μm | 100 |
| Thickness of bump foil | tb/μm | 100 |
| Length of bump element | S/mm | 4.064 |
| Span of bump element | 2l/mm | 3.434 |
| Poisson’s ratio | υ | 0.29 |
| Young’s modulus | E0/GPa | 207 |
| Pressure of environment | P0/Pa | 1.013 × 105 |
| Dynamic viscosity | μ/Pa·s | 1.84 × 10−5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, C.; Wang, Z.; Chen, Z.; Lyu, Y.; Zhang, J. Numerical Investigation of Unsteady Characteristics of Gas Foil Journal Bearings with Fluid–Structure Interaction. Aerospace 2023, 10, 616. https://doi.org/10.3390/aerospace10070616
Yang C, Wang Z, Chen Z, Lyu Y, Zhang J. Numerical Investigation of Unsteady Characteristics of Gas Foil Journal Bearings with Fluid–Structure Interaction. Aerospace. 2023; 10(7):616. https://doi.org/10.3390/aerospace10070616
Chicago/Turabian StyleYang, Changbao, Zhisheng Wang, Zhe Chen, Yuanwei Lyu, and Jingyang Zhang. 2023. "Numerical Investigation of Unsteady Characteristics of Gas Foil Journal Bearings with Fluid–Structure Interaction" Aerospace 10, no. 7: 616. https://doi.org/10.3390/aerospace10070616
APA StyleYang, C., Wang, Z., Chen, Z., Lyu, Y., & Zhang, J. (2023). Numerical Investigation of Unsteady Characteristics of Gas Foil Journal Bearings with Fluid–Structure Interaction. Aerospace, 10(7), 616. https://doi.org/10.3390/aerospace10070616