
A Layered Structure Approach to Assure Urban Air Mobility Safety and Efficiency

 , and
, and
Abstract
:1. Introduction
2. State-of-the-Art of UAM with Regard to Safety
3. AMU-LED Airspace Structure
- Separation between HPVs and manned aircraft:
- ○
- General Aviation (VFR) commonly lacks transponder/conspicuity means, which make non-visual separation very difficult.
- ○
- Having different altitude references for unmanned (GNSS) and manned aviation (barometric) is also an important concern.
- ○
- High cruise speeds, which make timely reactions to non-nominal or contingent operations difficult.
- Separation between HPVs and SPVs:
- ○
- The limited range of existing drone remote eIdentification (eID) solutions (bluetooth/wifi) means that they are not applicable for separation assurance and DAA (Detect and Avoid) within UAM.
- ○
- ADS-B (Automatic Dependent Surveillance—Broadcast) cannot be generalised to every drone to avoid 1090 MHz saturation, and other surveillance systems are not yet widely used.
- ○
- SPVs and HPVs have different features and performances (speed, etc.).
- ○
- SPVs cannot be mandated to carry on board equipment with the same level of performance than those for HPVS, as the high cost and even size/weight could jeopardize the accessibility of these vehicles to the airspace.
- U-space traffic management issues:
- ○
- U-space Service Providers (USSPs) have to provide an appropriate performance level at all times, but different performance requirements may coexist, depending on the aircraft needs and type of airspace.
- ○
- Having several USSPs collaborating, together with other actors like Air Traffic Control, increases complexity and requires important interfacing and procedures standardization efforts to provide their services.
- ○
- Tactical separation/deconfliction complexity, considering the manoeuvrability of rotorcraft and VTOL, the different types and sizes of SPVs/HPVs, and the lack of flight procedures/routes.
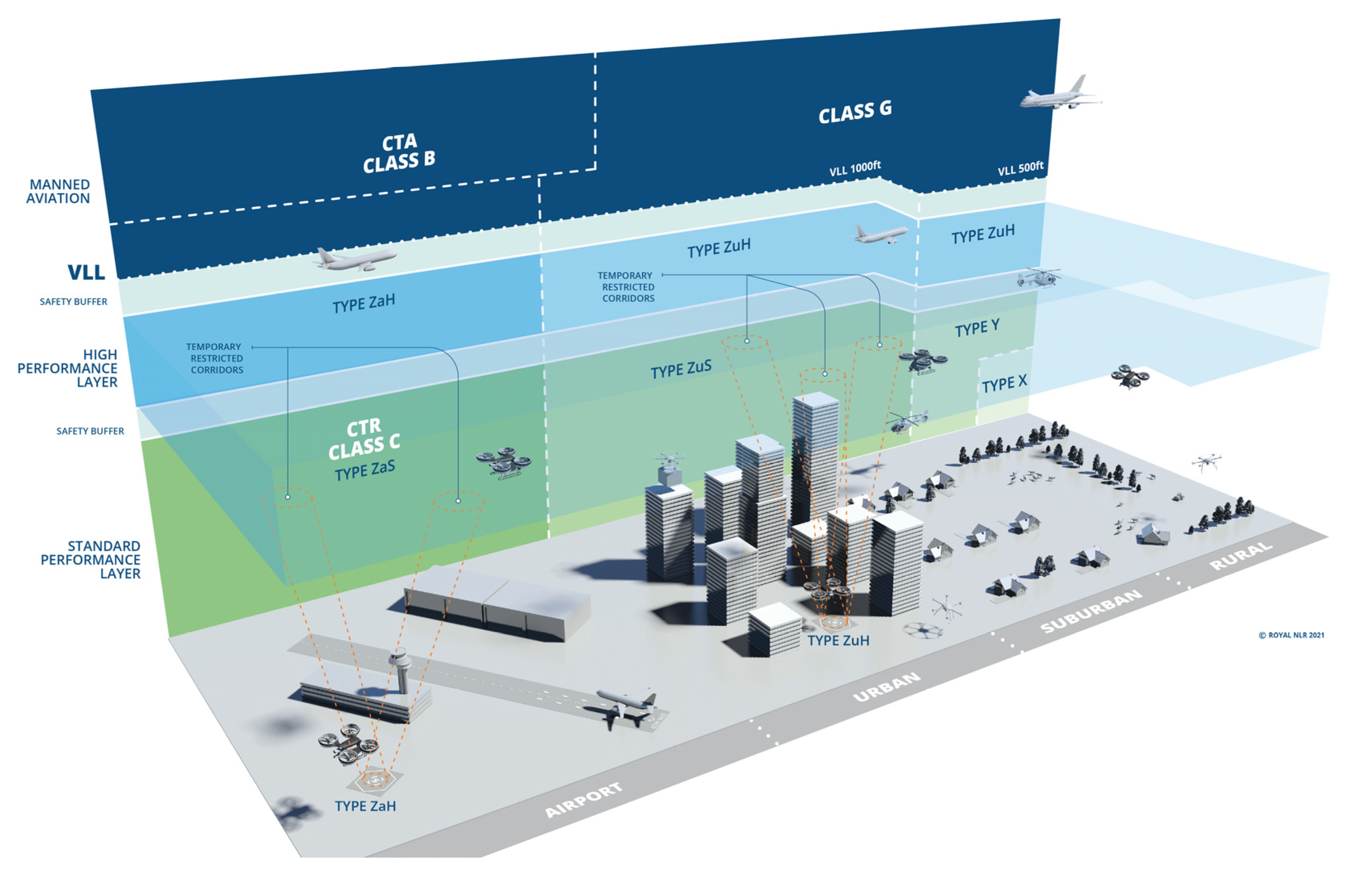
- The high-performance layer—HPV layer—would be a CORUS type Z airspace [20] devoted mainly to HPV cruise operations and forbidden for common drones (SPVs), assuring sufficient separation between them. If the type Z airspace is located in controlled airspace, it is categorised as Za, with Zu being located in uncontrolled urban airspace. As this layer is still within the VLL, this also ensures separation with manned aviation. Moreover, manned aviation could enter this layer, provided that such manned vehicles adhere to the rules and procedures, carry on board the required technologies and make use of the required U-space services, in accordance with EU U-space Regulations [25,26]. Moreover, in controlled airspace, ATC could demand a dynamic airspace reconfiguration of the U-space volume to allow a temporary invasion of a manned aircraft (e.g., a police helicopter), but this reconfiguration would imply that every UAS (even HPV) would have to leave that portion of the airspace during the time required for the operation of the manned aircraft.
- The standard-performance layer—SPV layer—would be assigned for the rest of UAS, including CORUS type Z, Y and X volumes, depending on the area needs (density of operations and complexity).
- These volumes will be published in the Drone Aeronautical Information as Restricted Access Volumes, so airspace users will be aware that entering these volumes will not be possible in certain moments; additionally, the publication will provide situational awareness of potential danger when flying in the vicinity.
- However, as they will be promulgated as restricted access volumes, other SPV flight plans could be allowed to cross them when no HPV operations are expected, i.e., when they are not active. However, when a HPV operation is expected or is close to happening, the restricted volume will be activated (volume booked in the HPV flight authorisation) and any SPV flight plan crossing the volume will be rejected.
- The USSP/Vertiport Operator will be responsible for the activation of the corresponding restricted airspace volume, as well as for its deactivation once the HPV’s operation is completed. Thus, restricted landing and take-off volumes allow for a maximization of the use of the airspace by other users when HPVs are not making use of them.
- In the case of requested landings to unprepared locations (e.g., emergency landing) where no vertiport is available, a temporary segregation could be defined by means of a geo-fenced volume for the landing/take-off of these HPV vehicles, which would be distributed by the Geo-Awareness service [25].
4. Materials and Methods
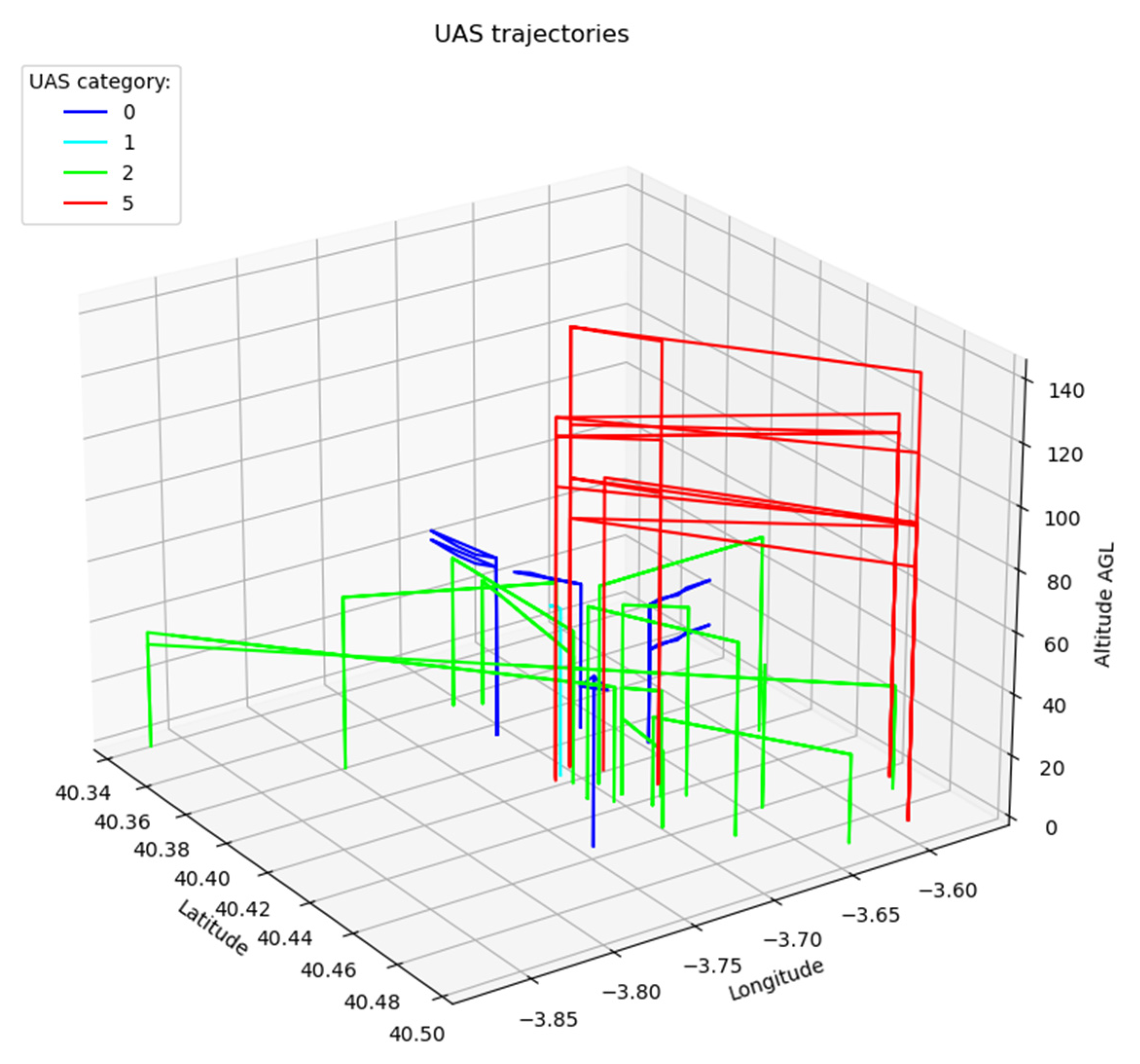
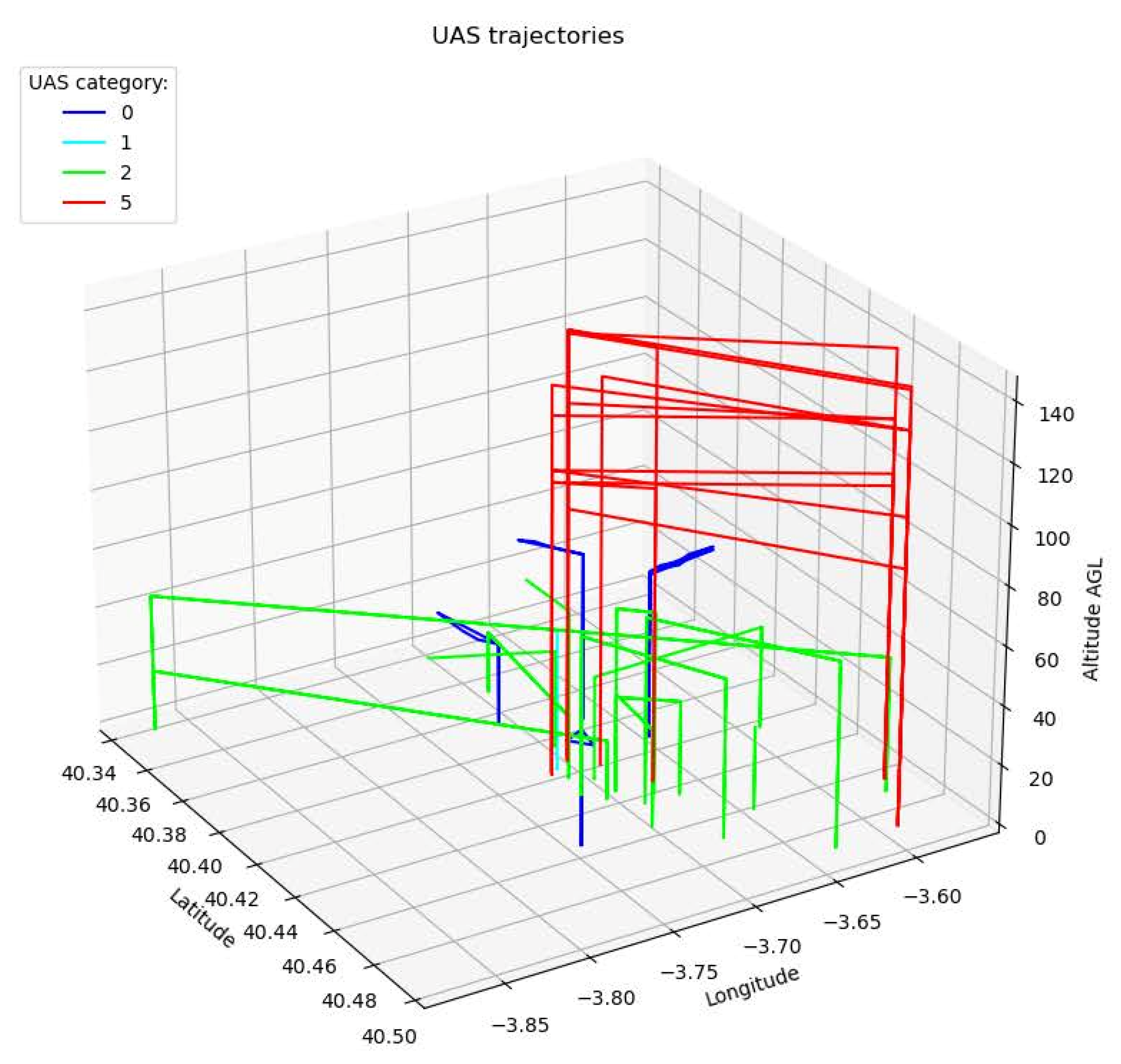
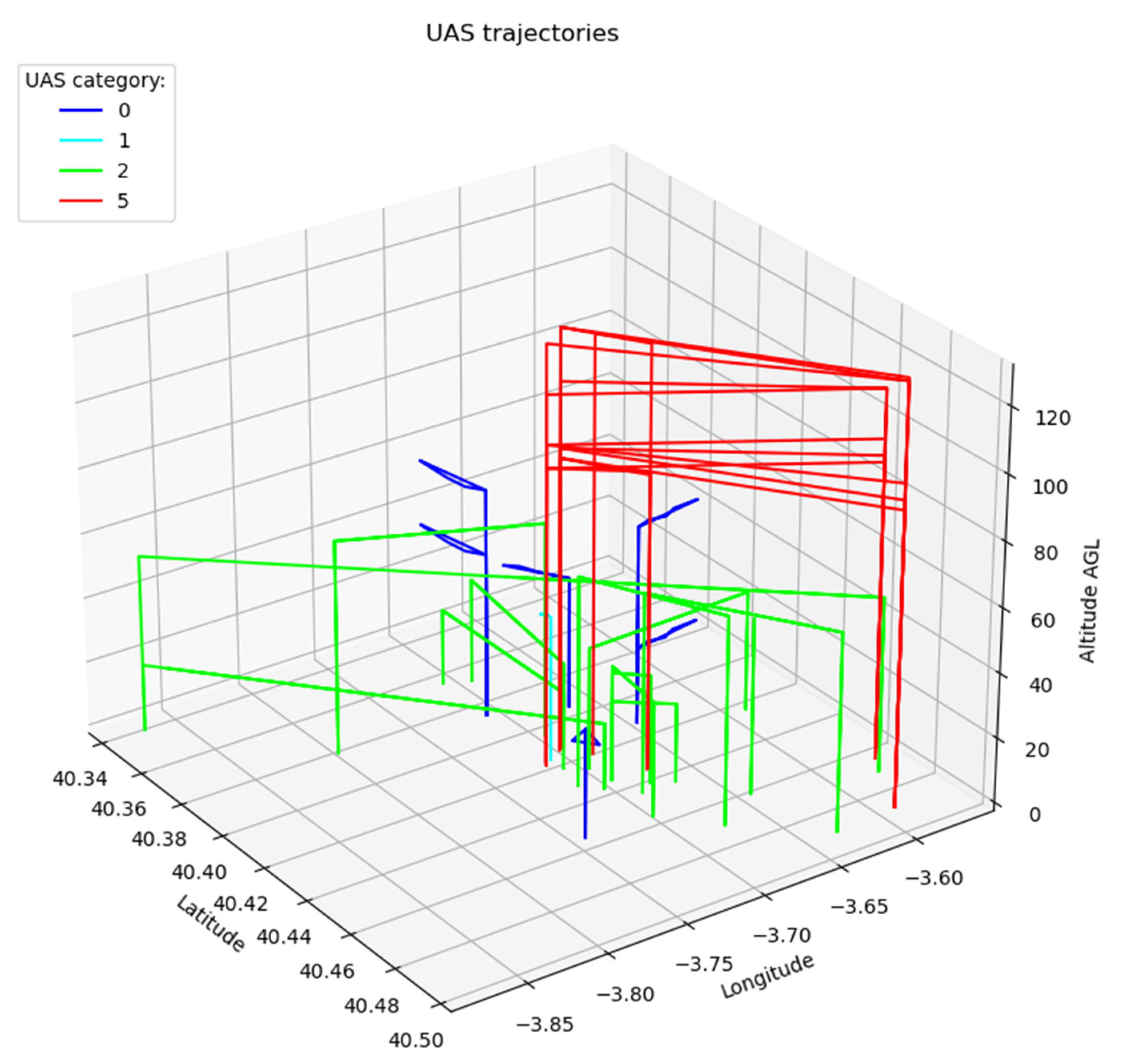
- : Random position of UAS “i” in the east–west direction
- : Random position of UAS “i” in the north–south direction
- : Random altitude of UAS “i”
- : Velocity of UAS “i”
- : Heading in the horizontal plane (x,y) of UAS “i”
- : Pitch in the vertical plane (y,z) of UAS “i”.
5. Results
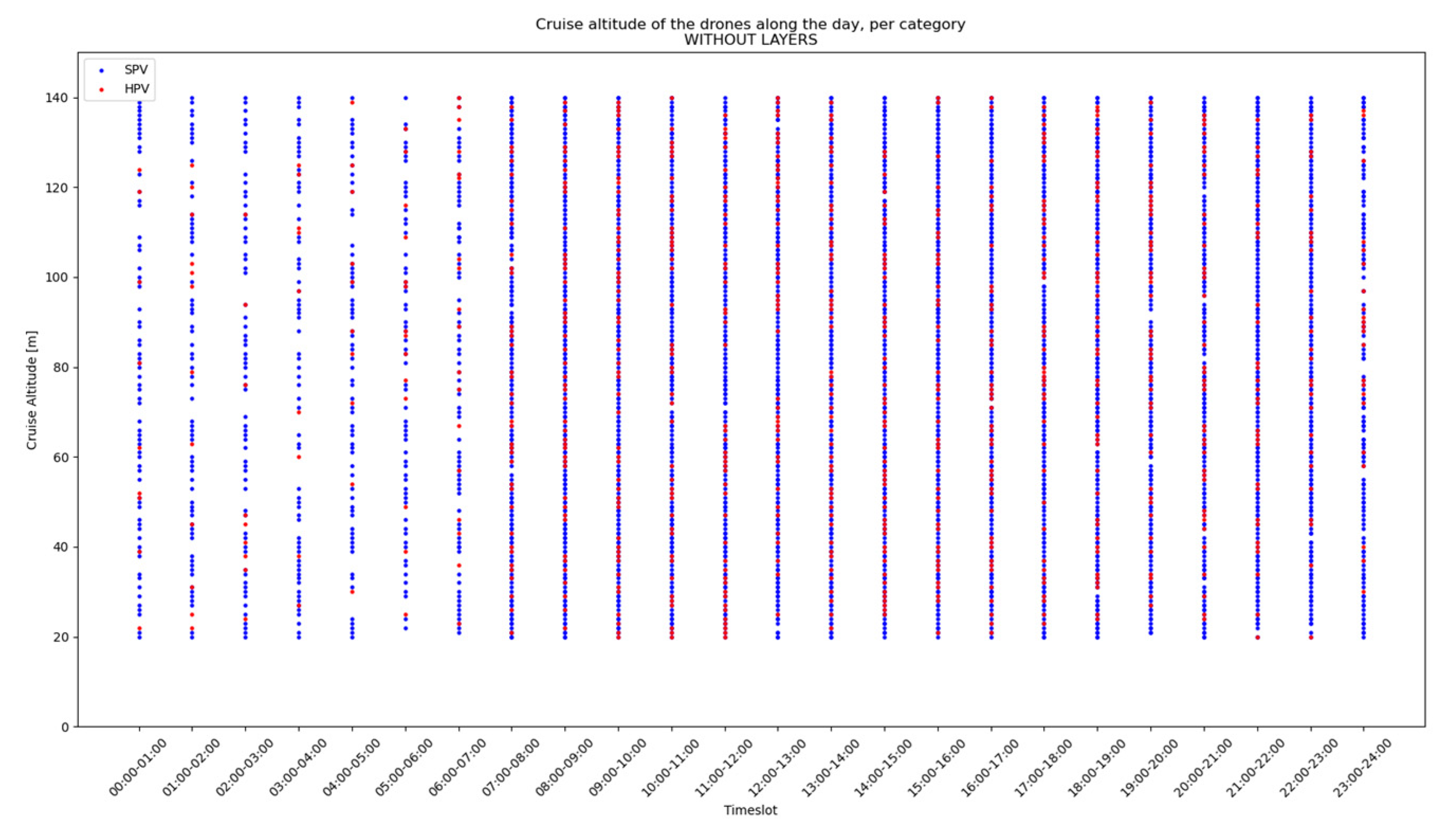
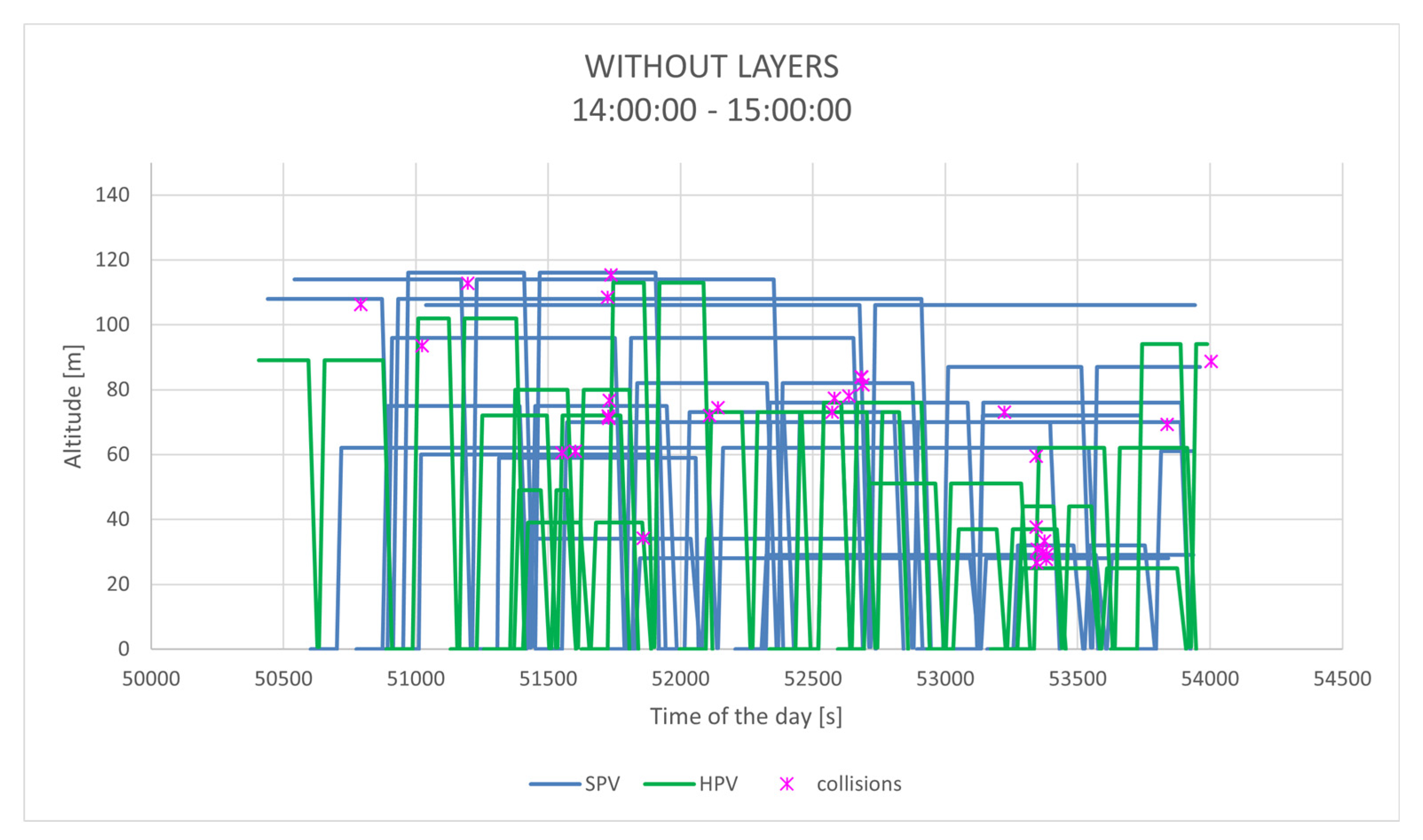
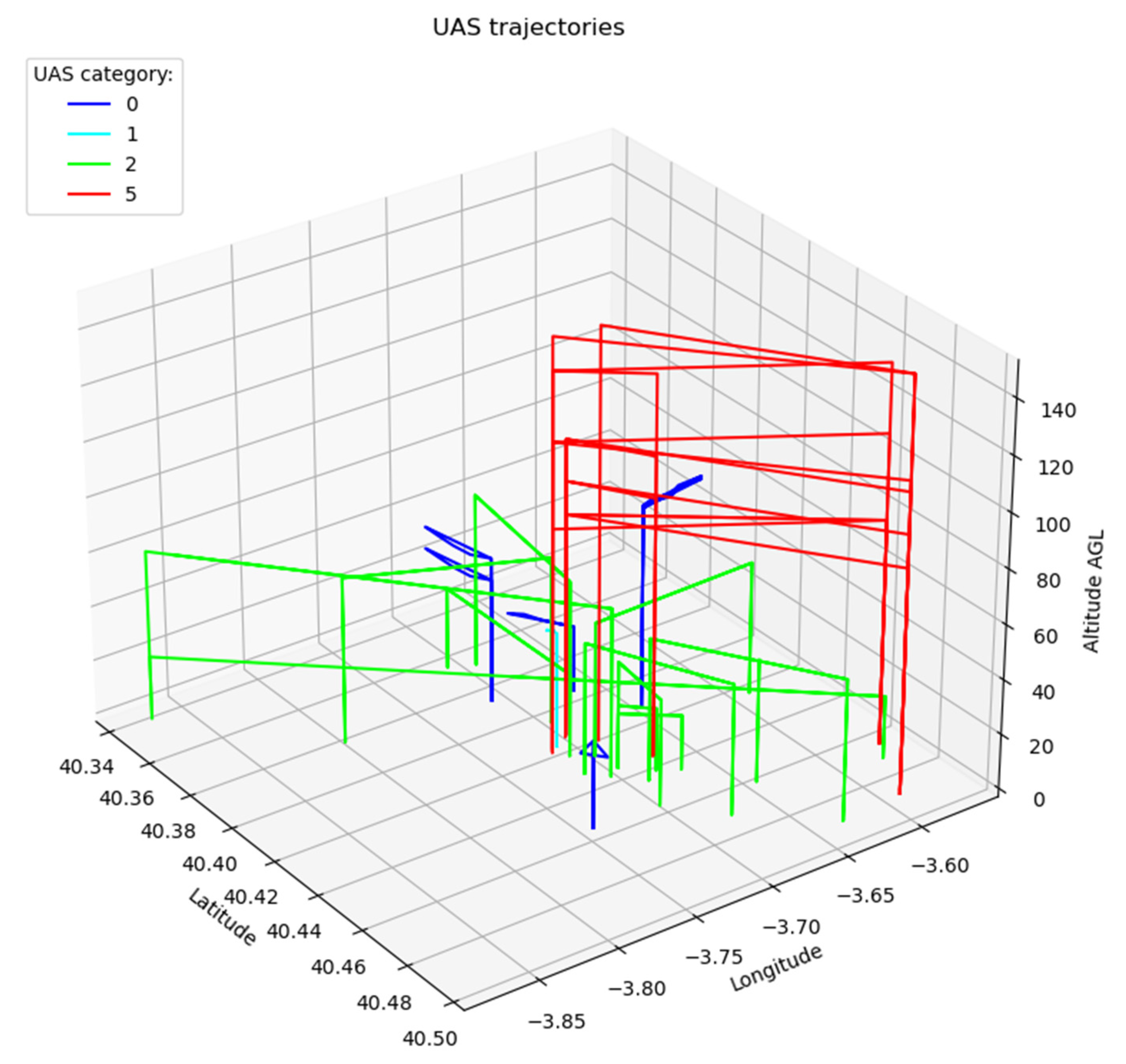
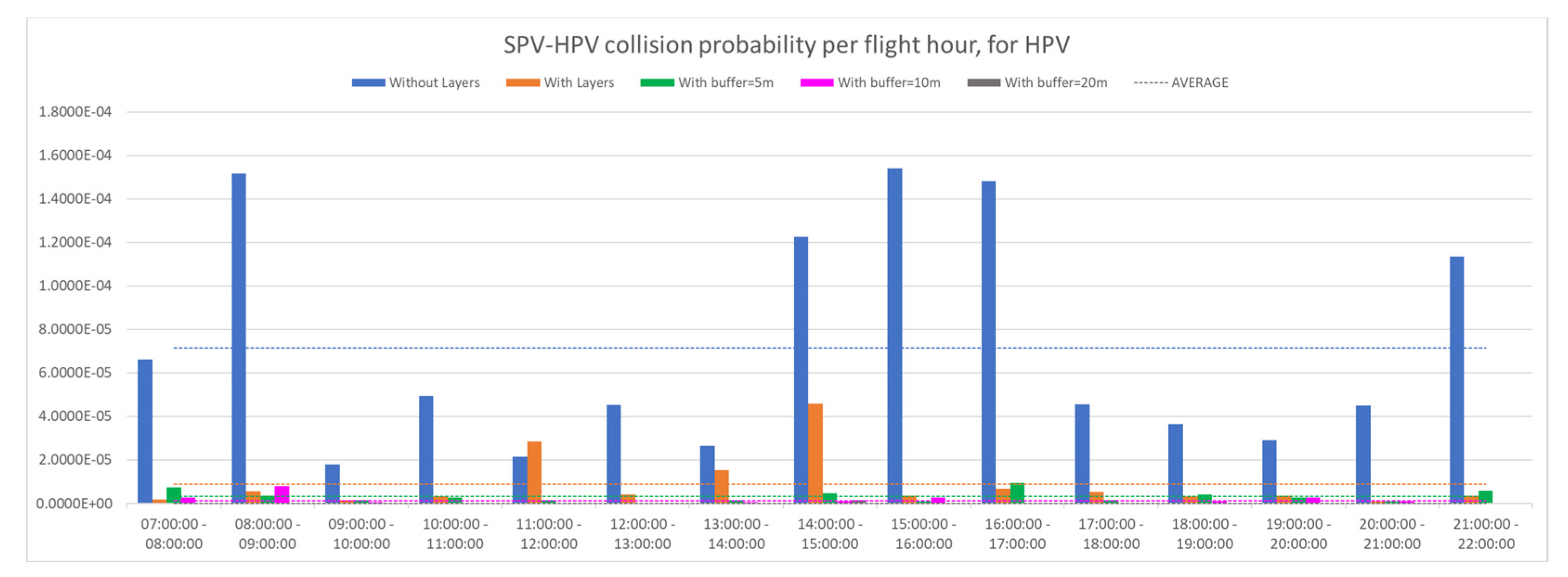
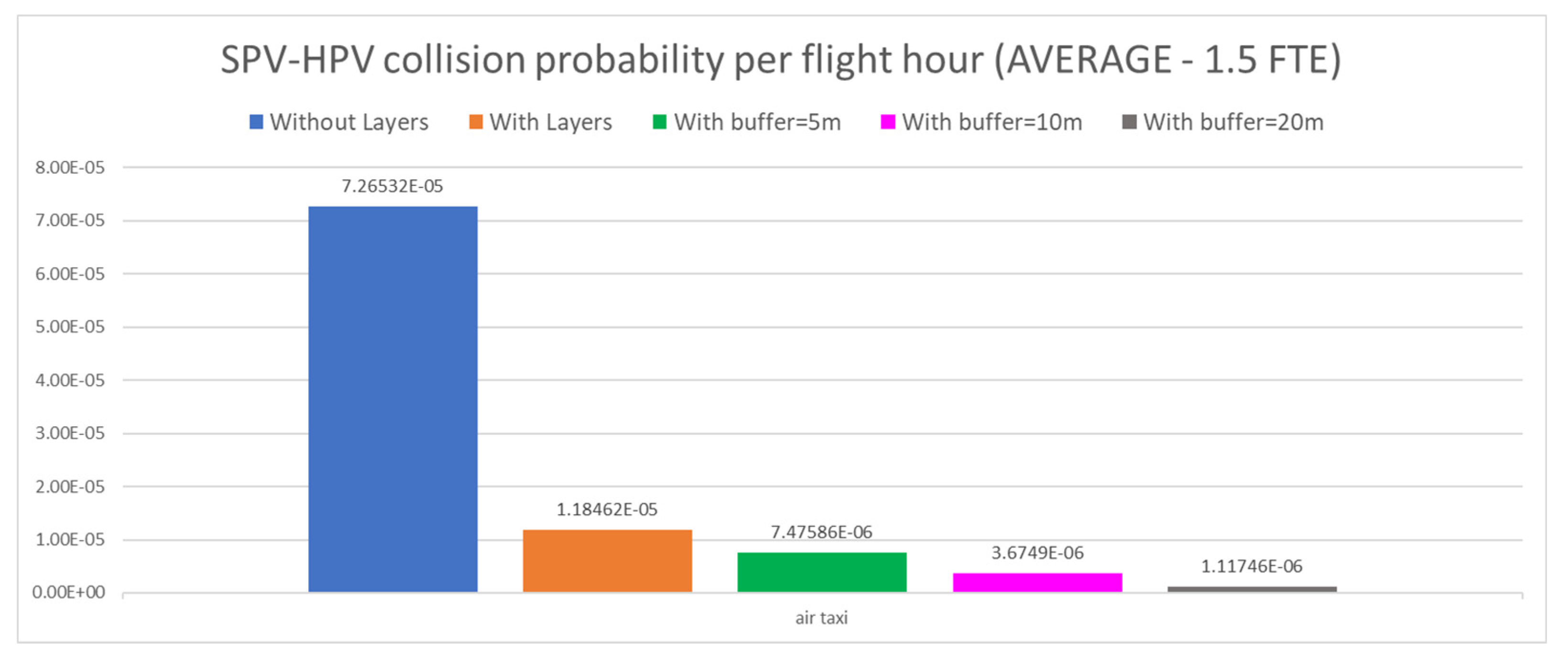
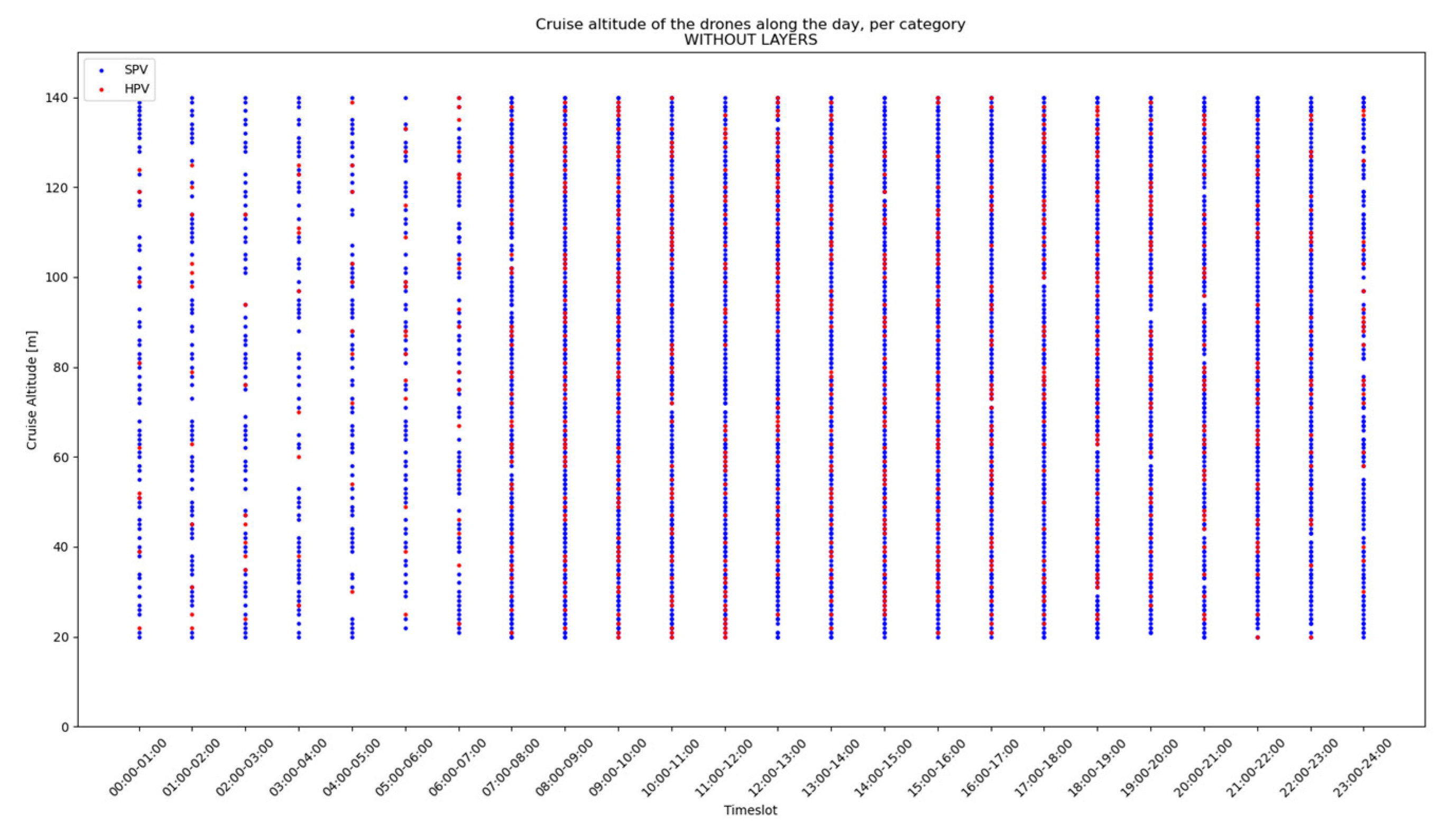
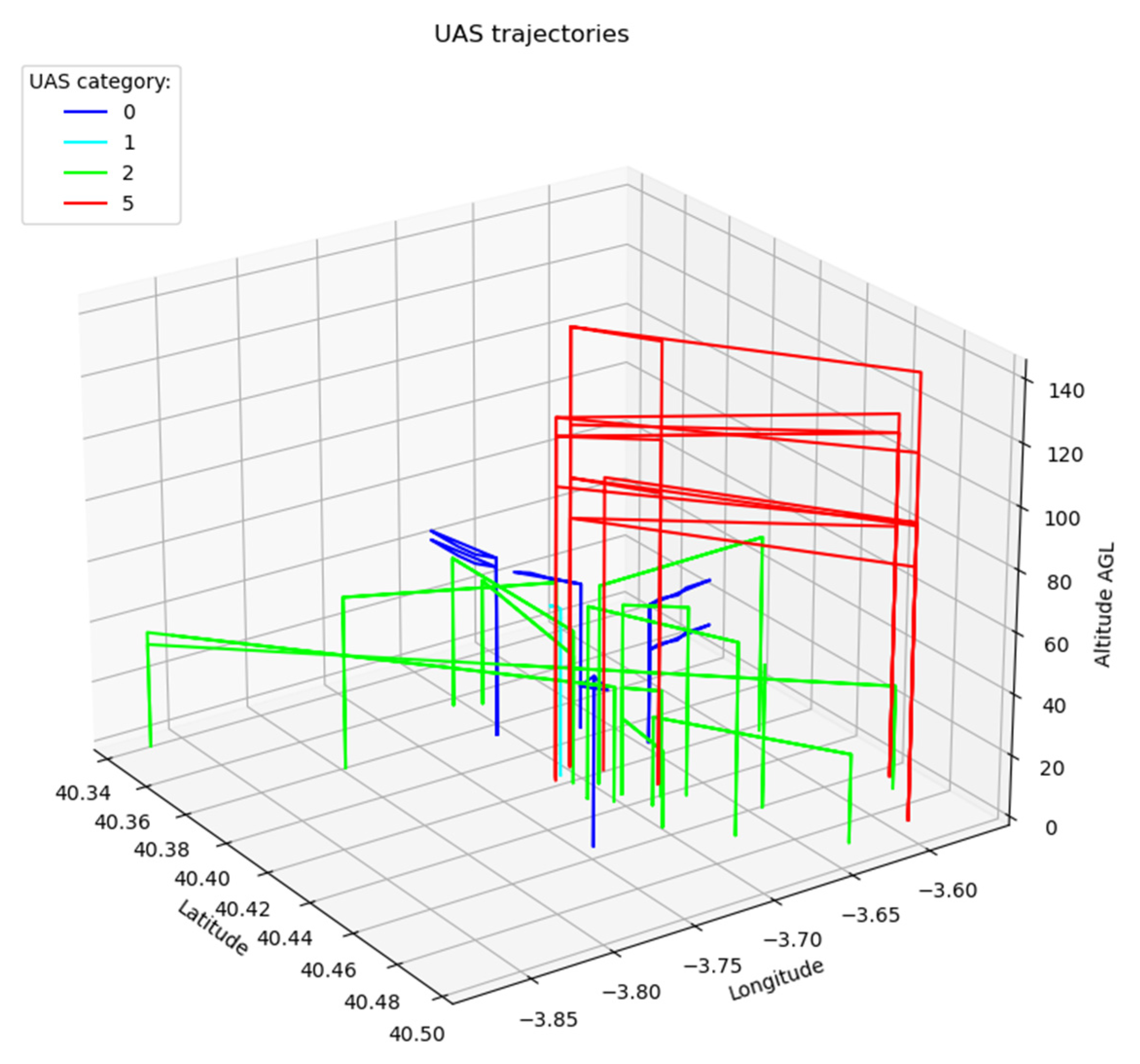
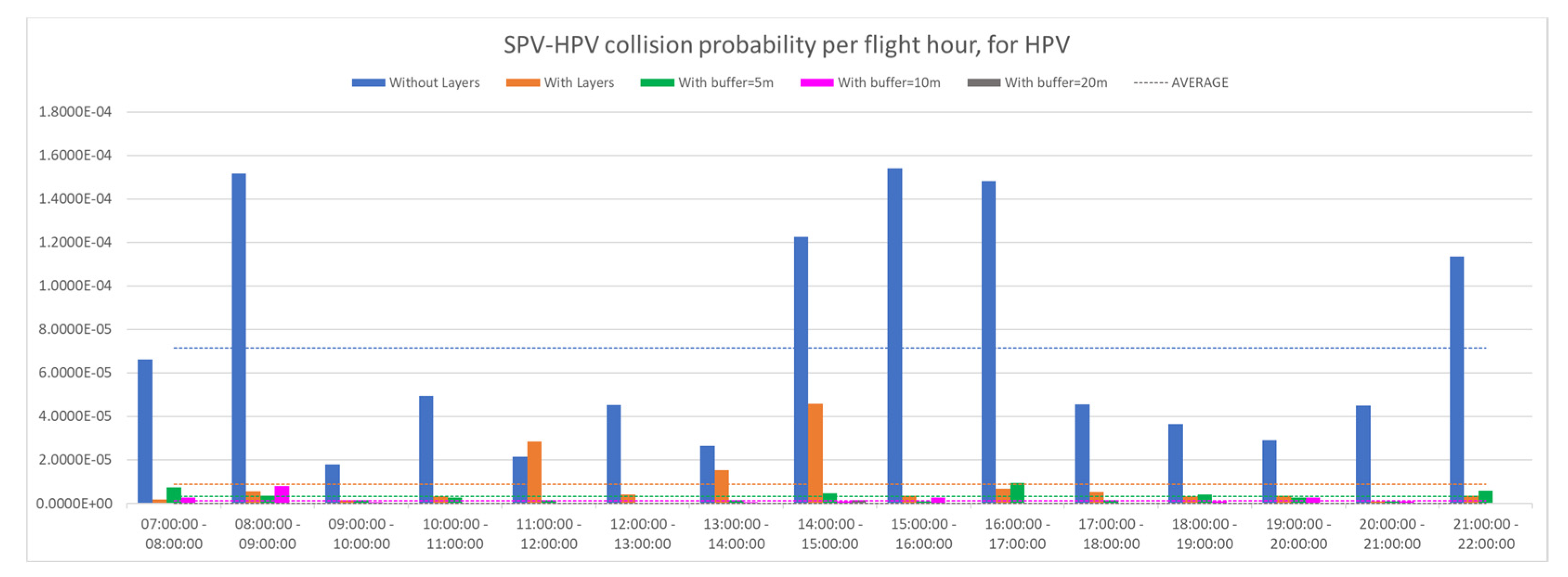
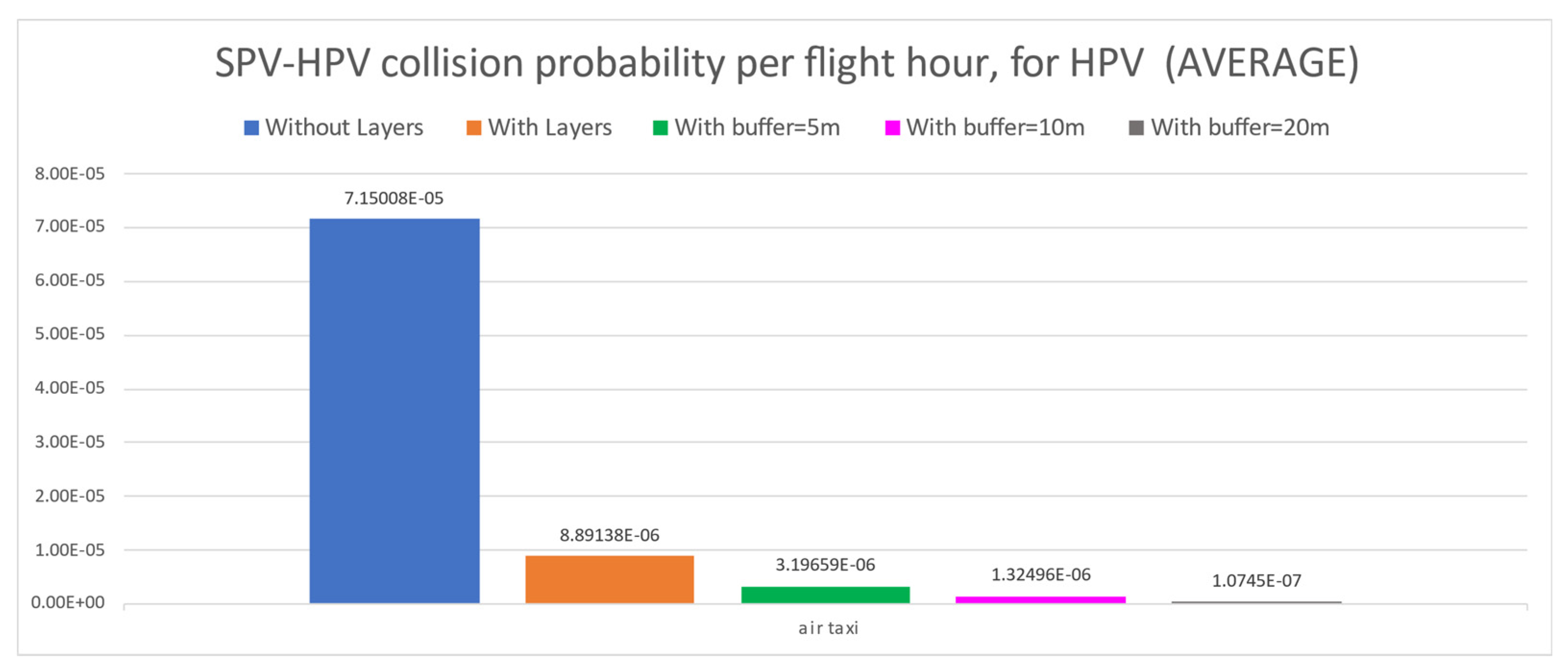
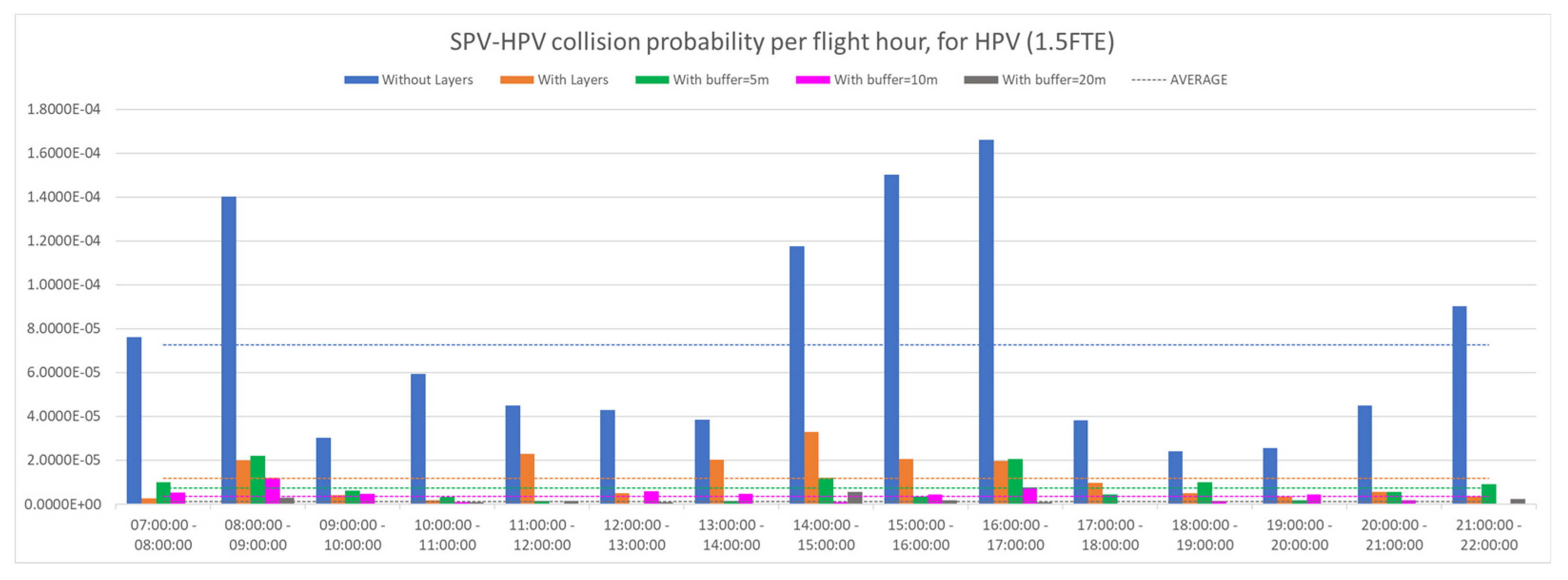
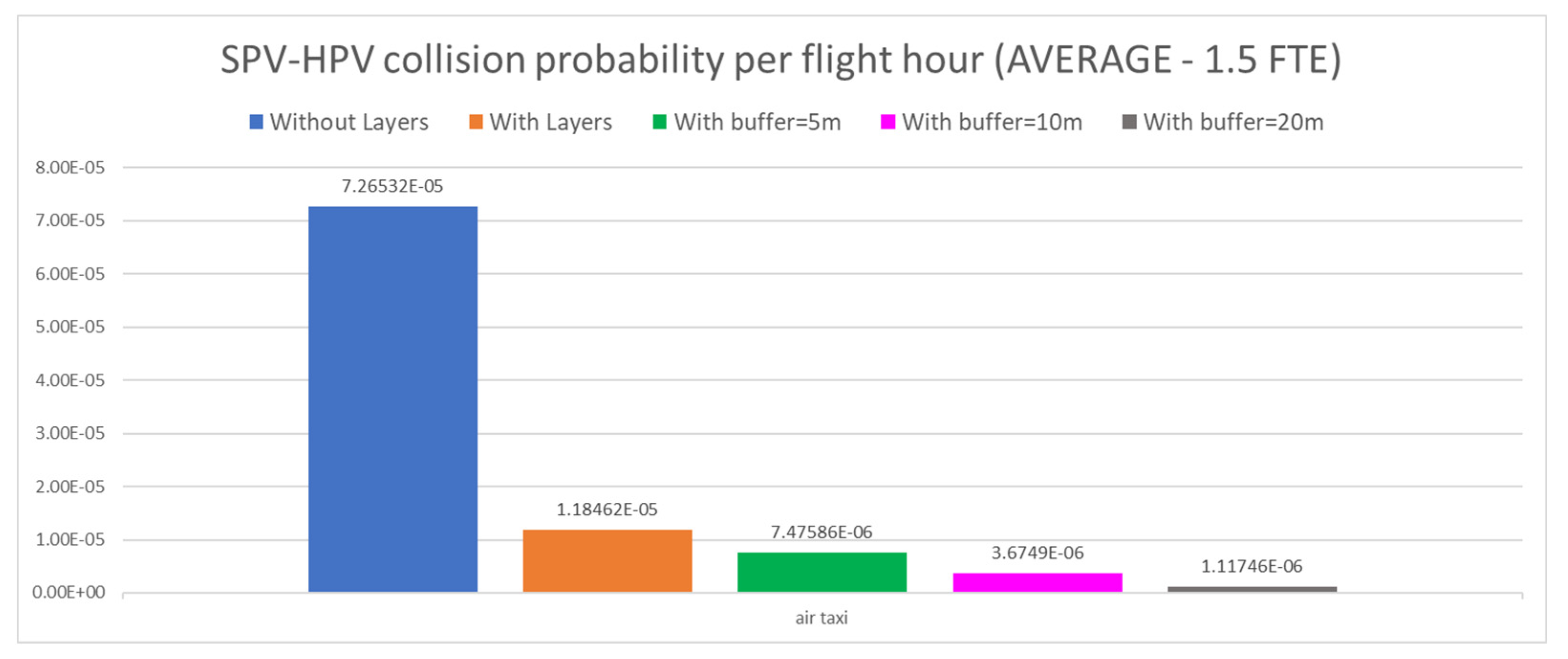
- Without layers: HPVs and SPVs can fly in the entire volume of the VLL;
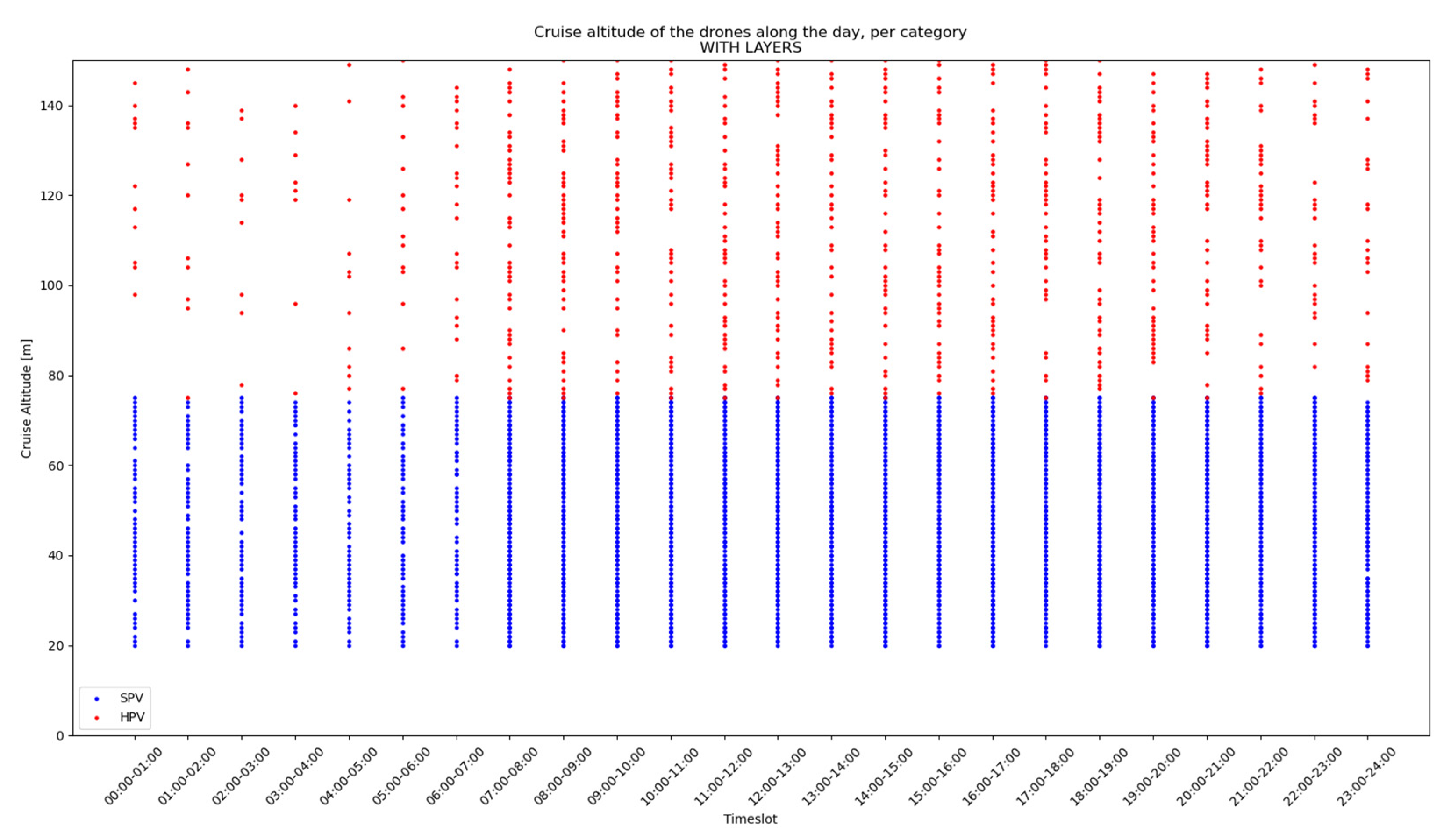
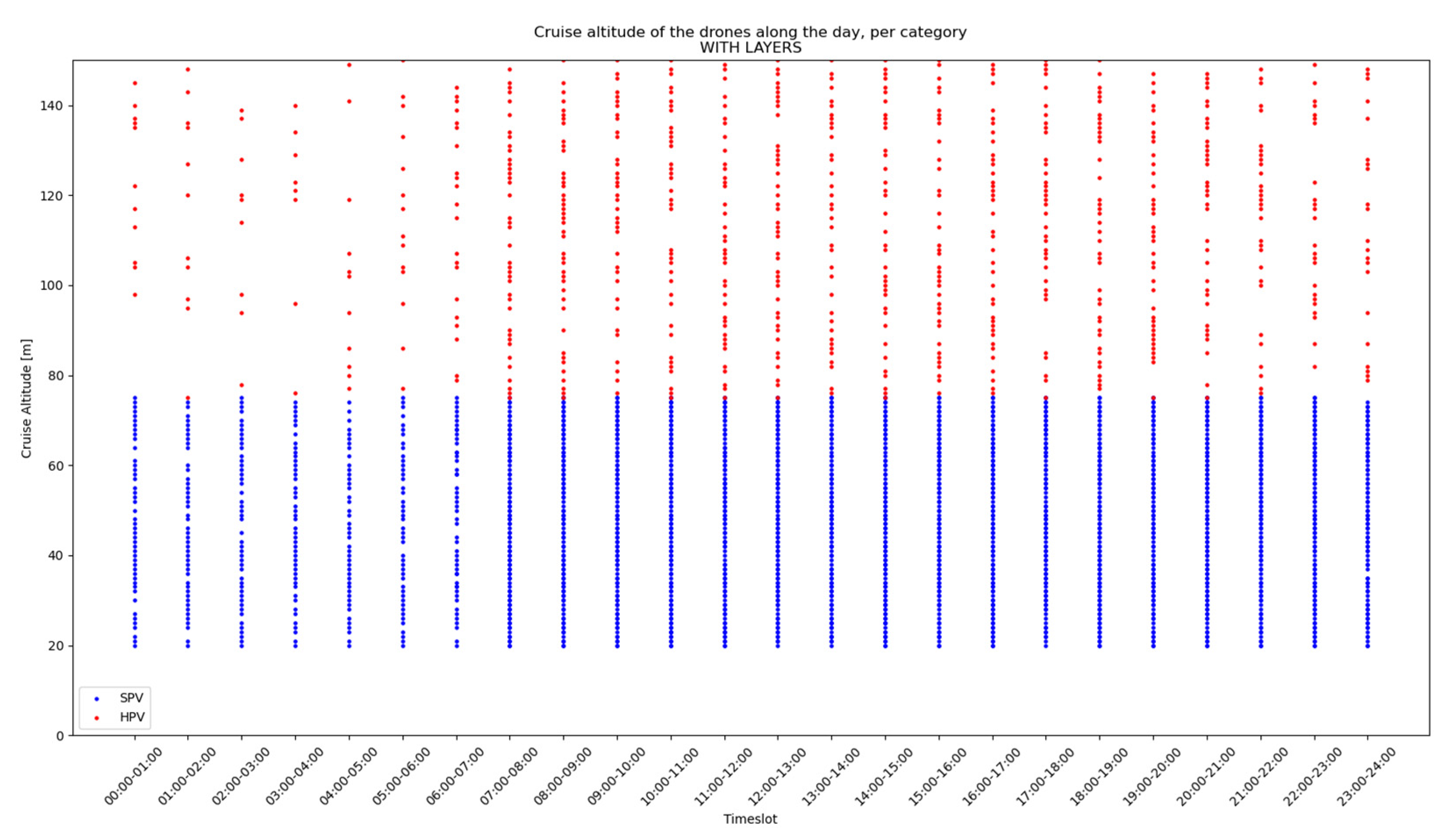
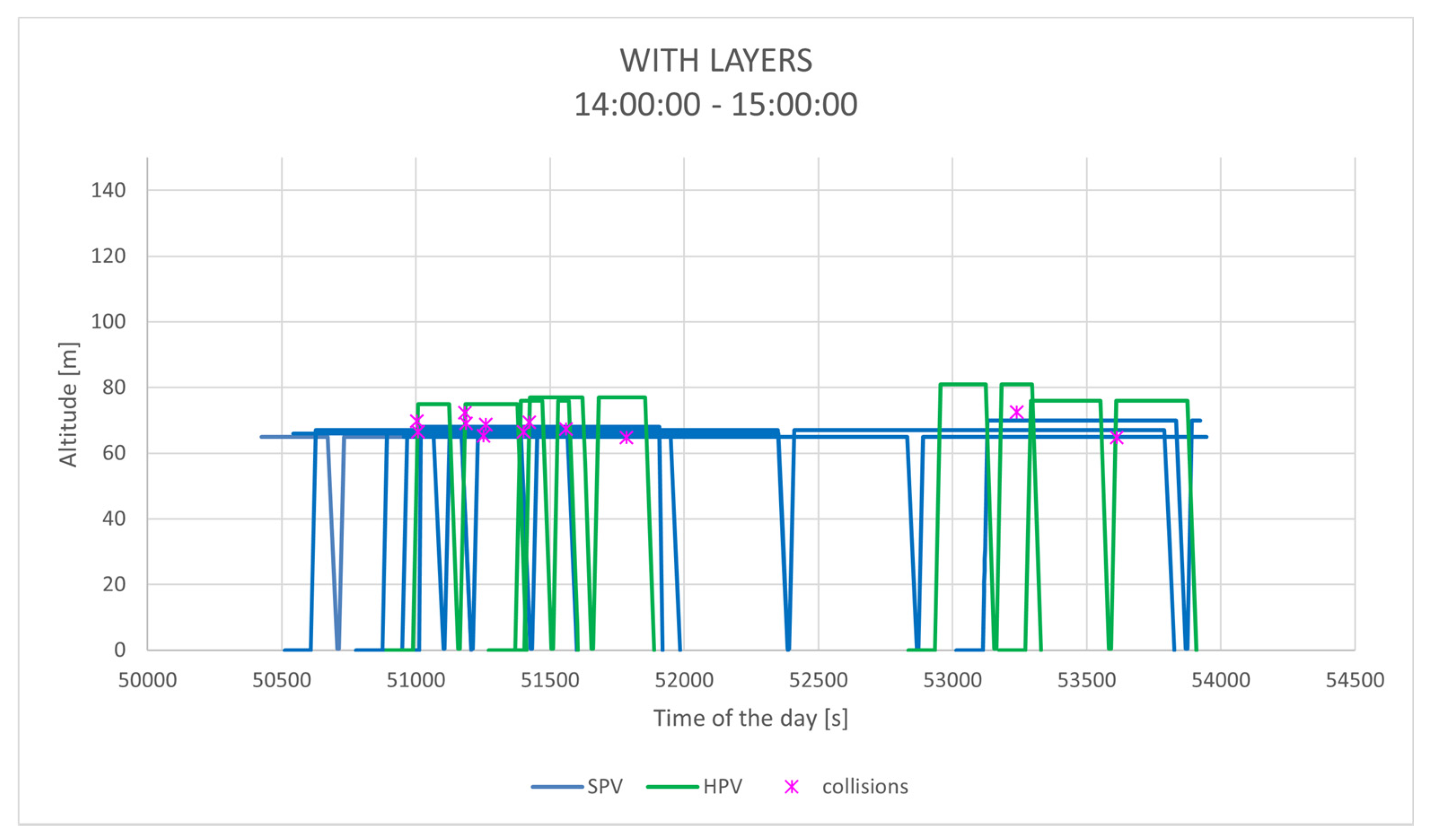
- With layers: HPVs and SPVs are separated into layers (HPVs fly above 75 m and SPVs below 75 m), but there is no buffer between layers;
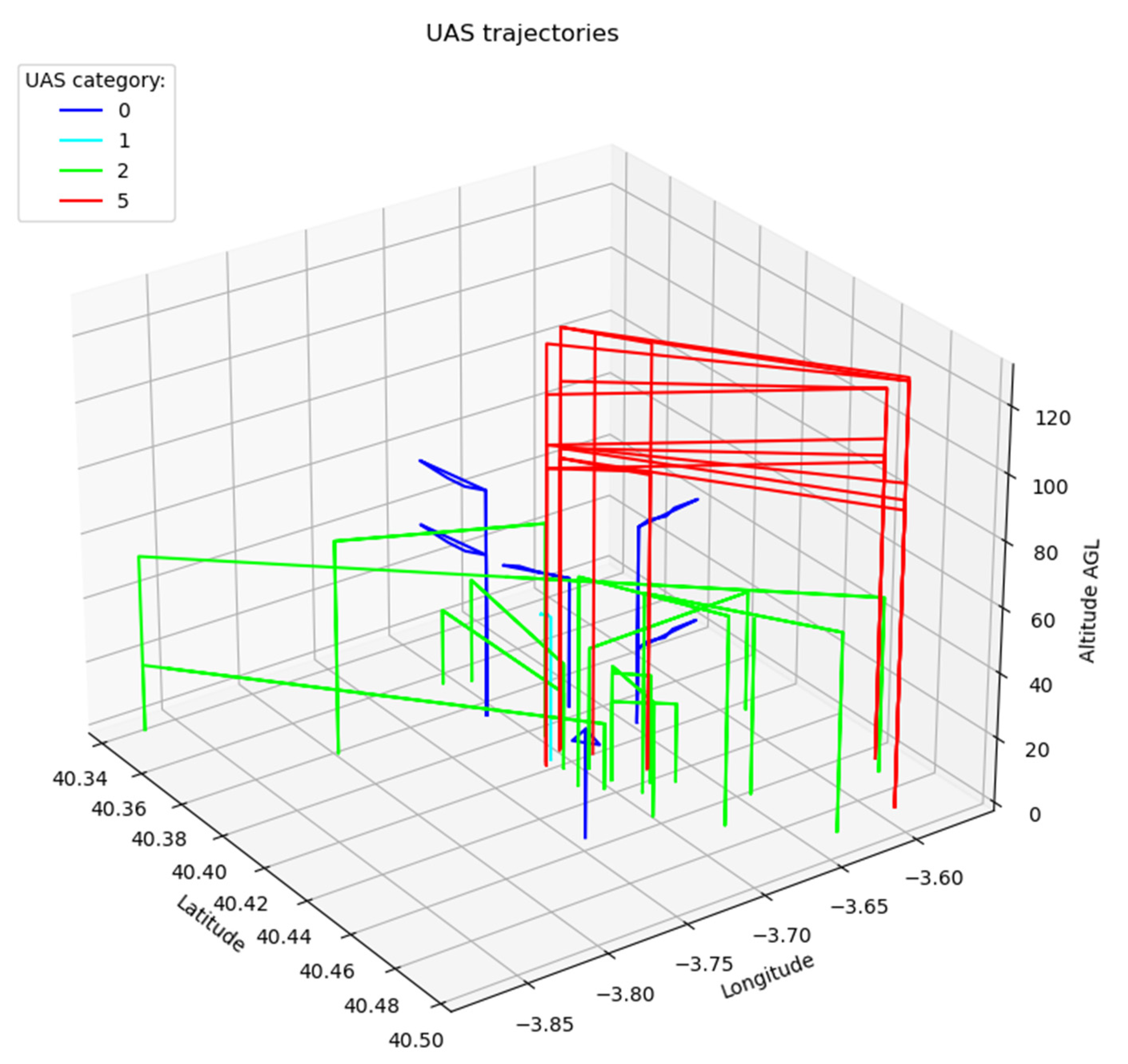
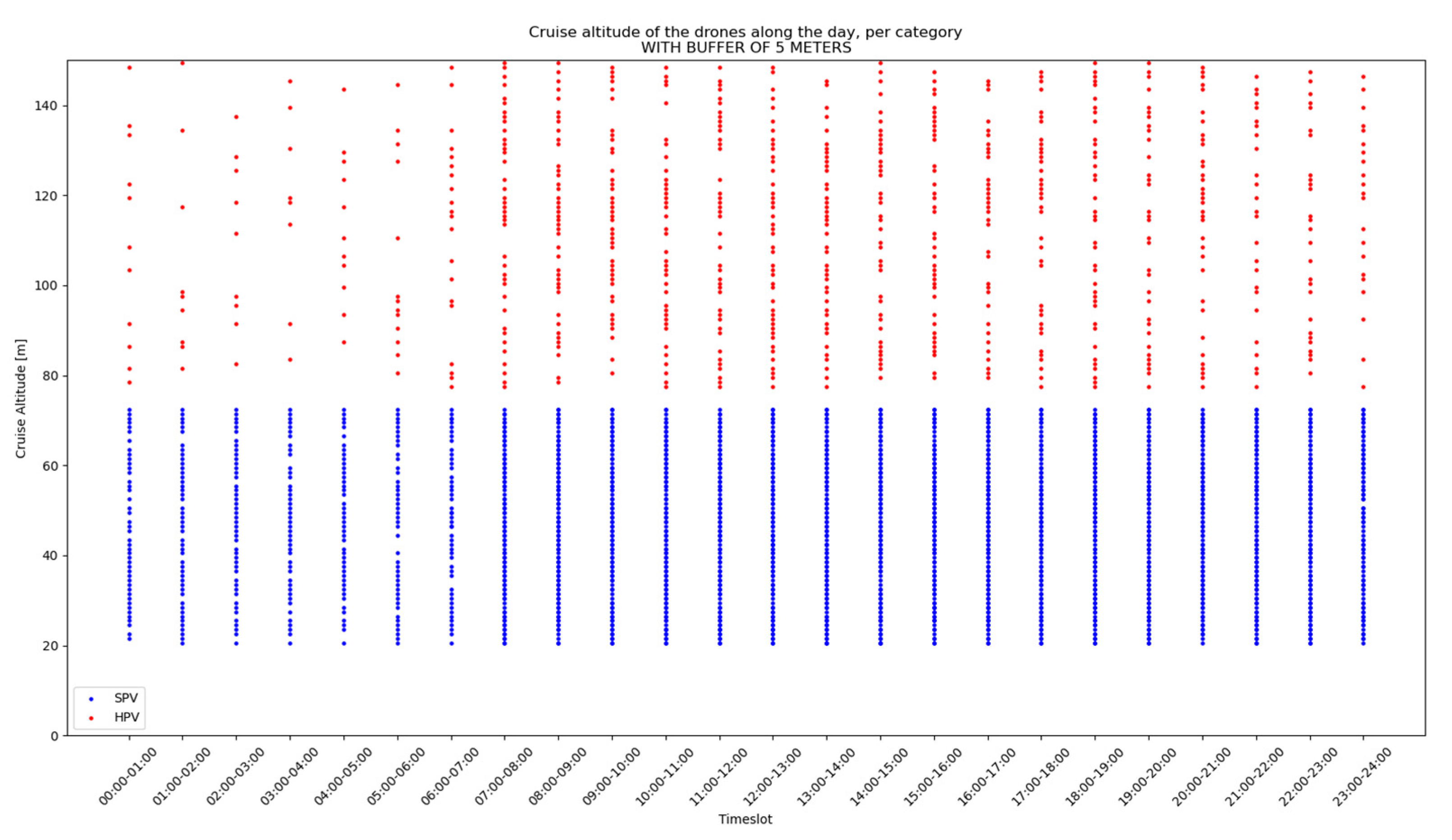
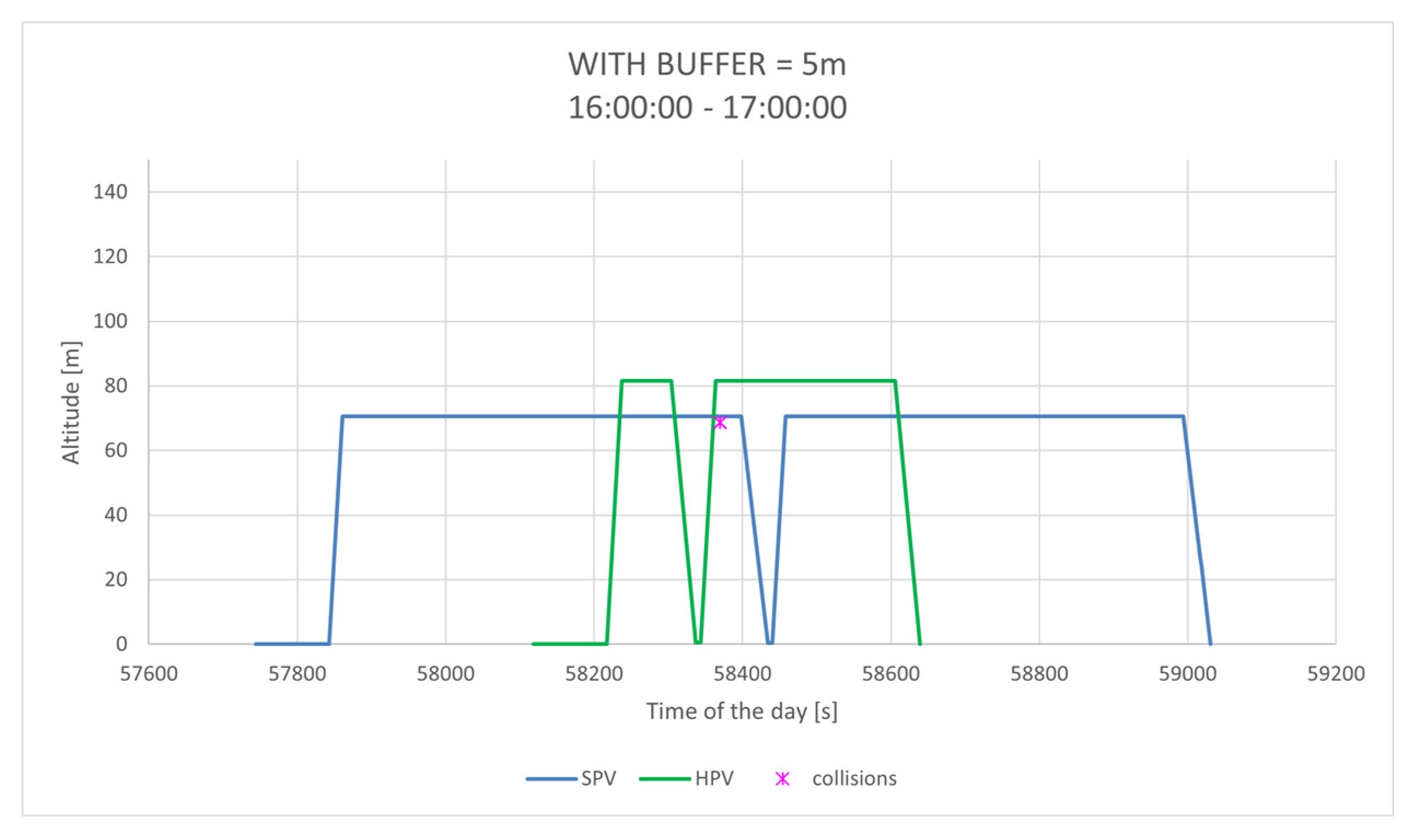
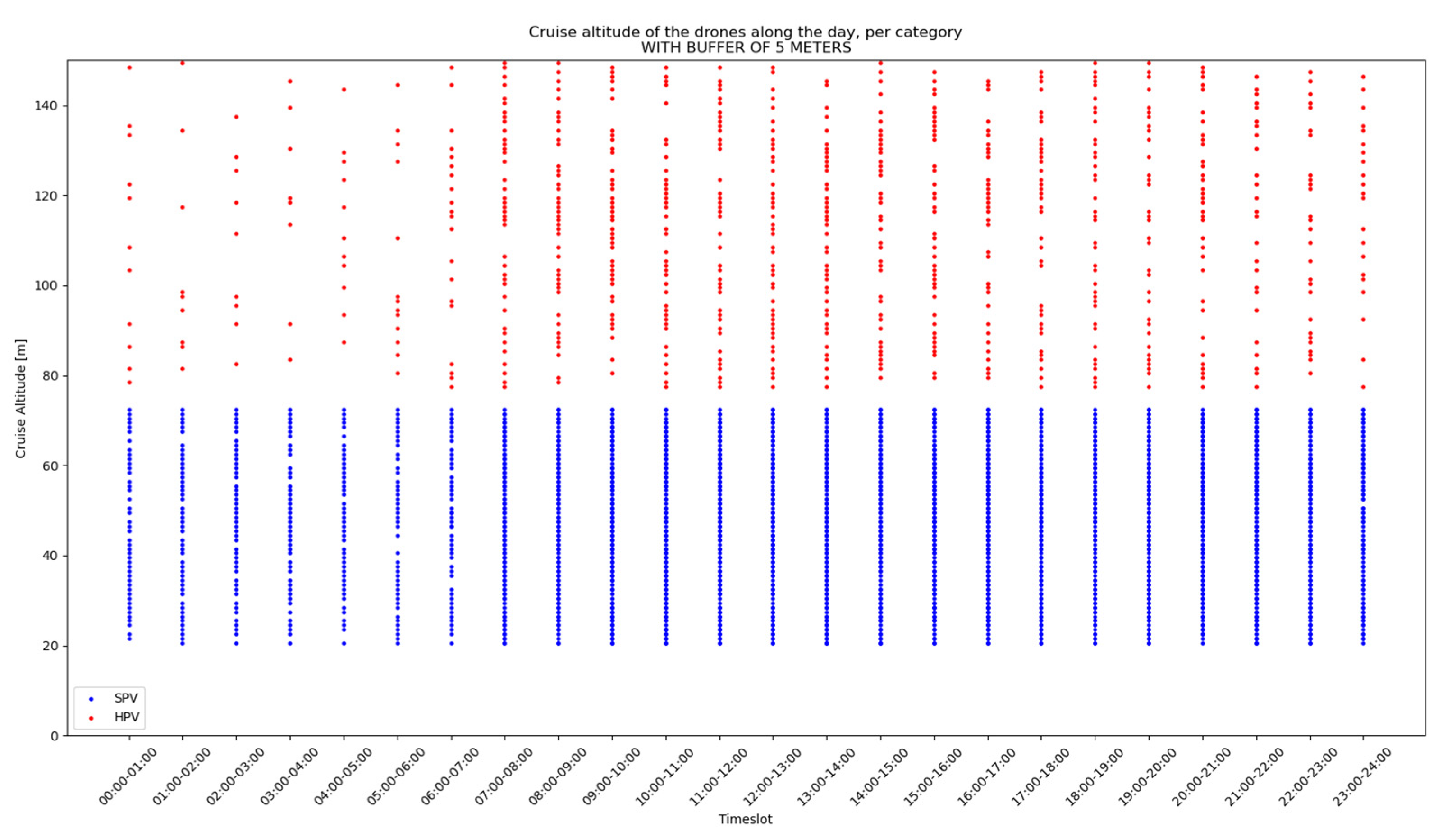
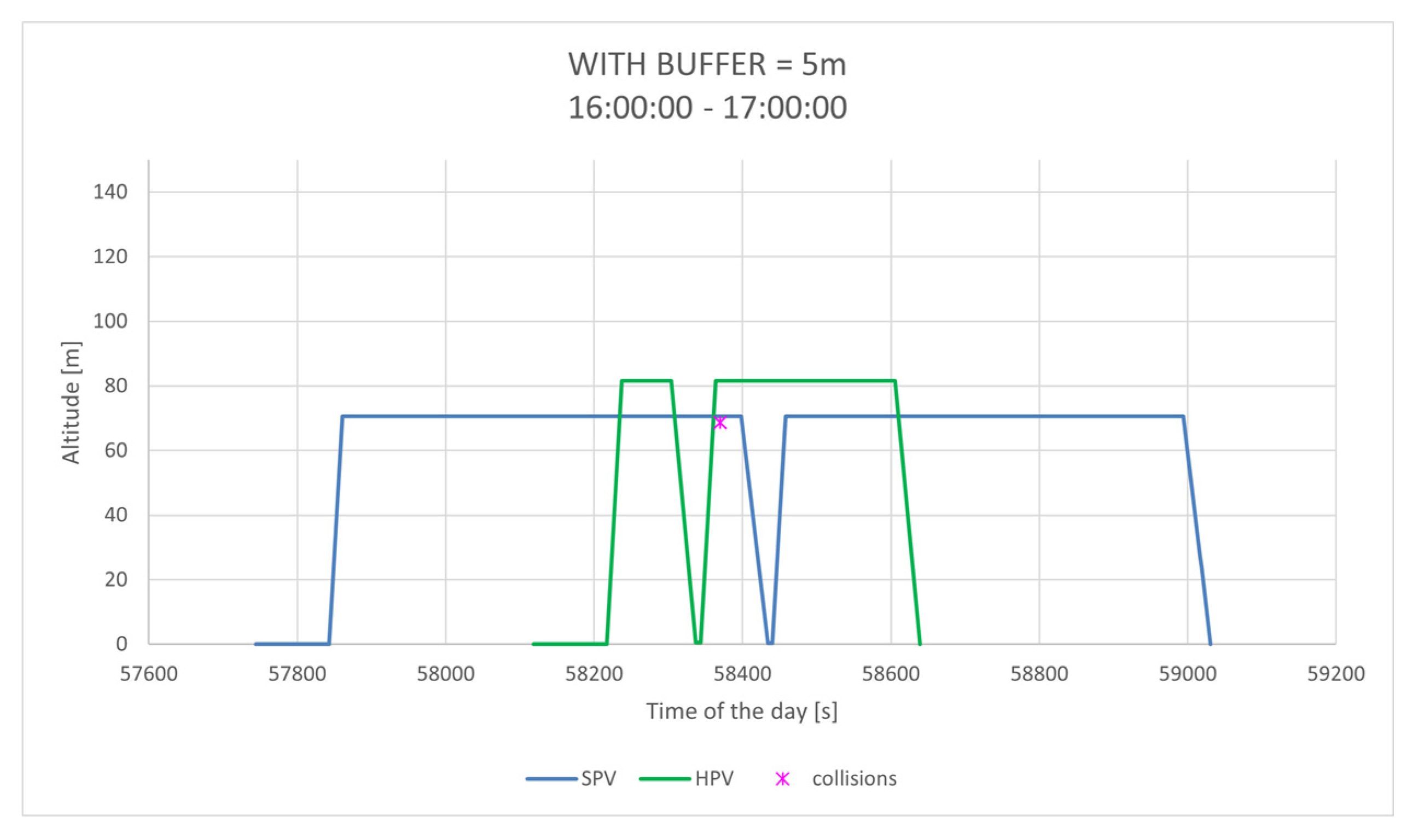
- Buffer 5 m: HPVs and SPVs are separated into layers with a buffer of 5 m between them (HPVs fly above 77.5 m and SPVs below 72.5 m);
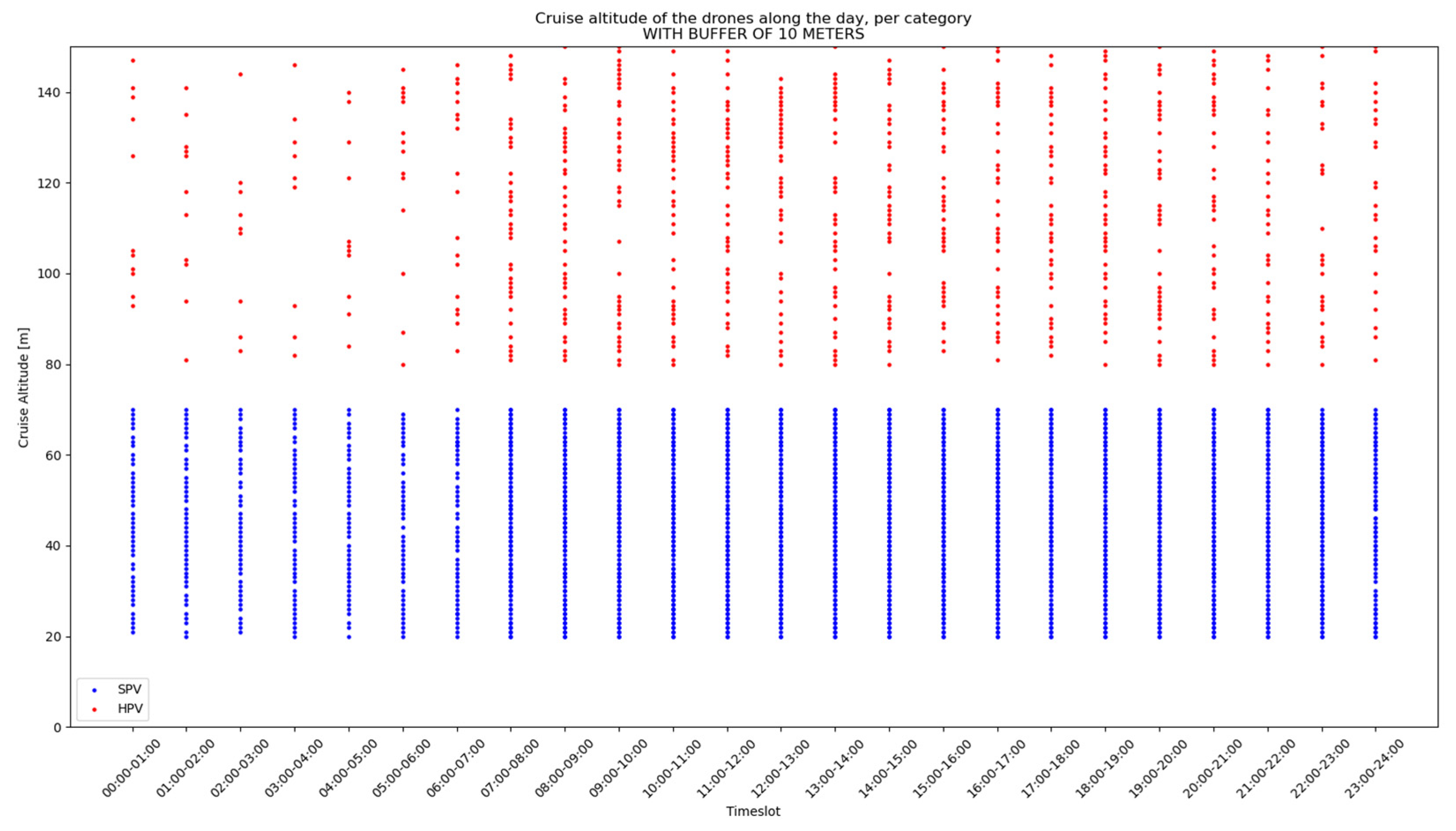
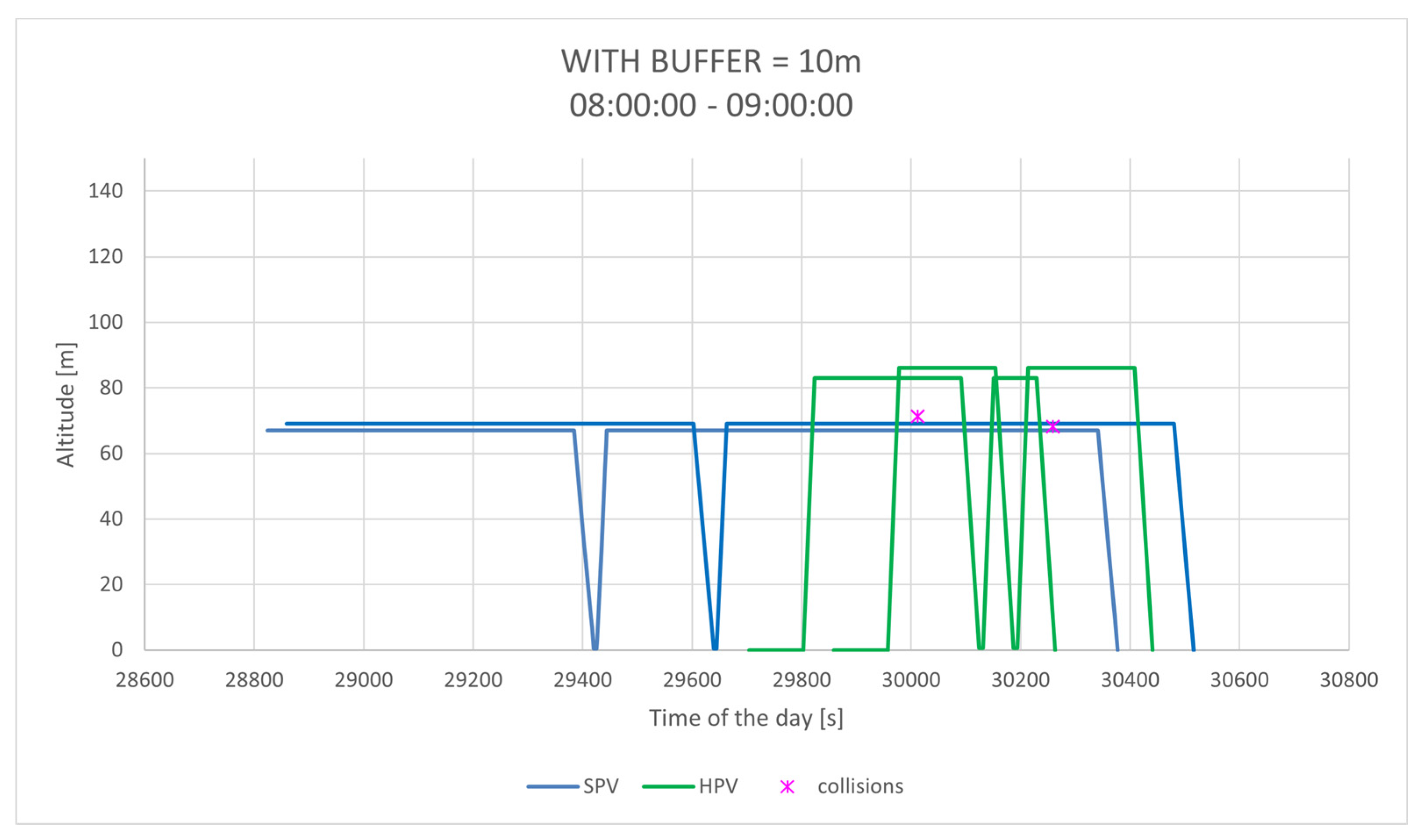
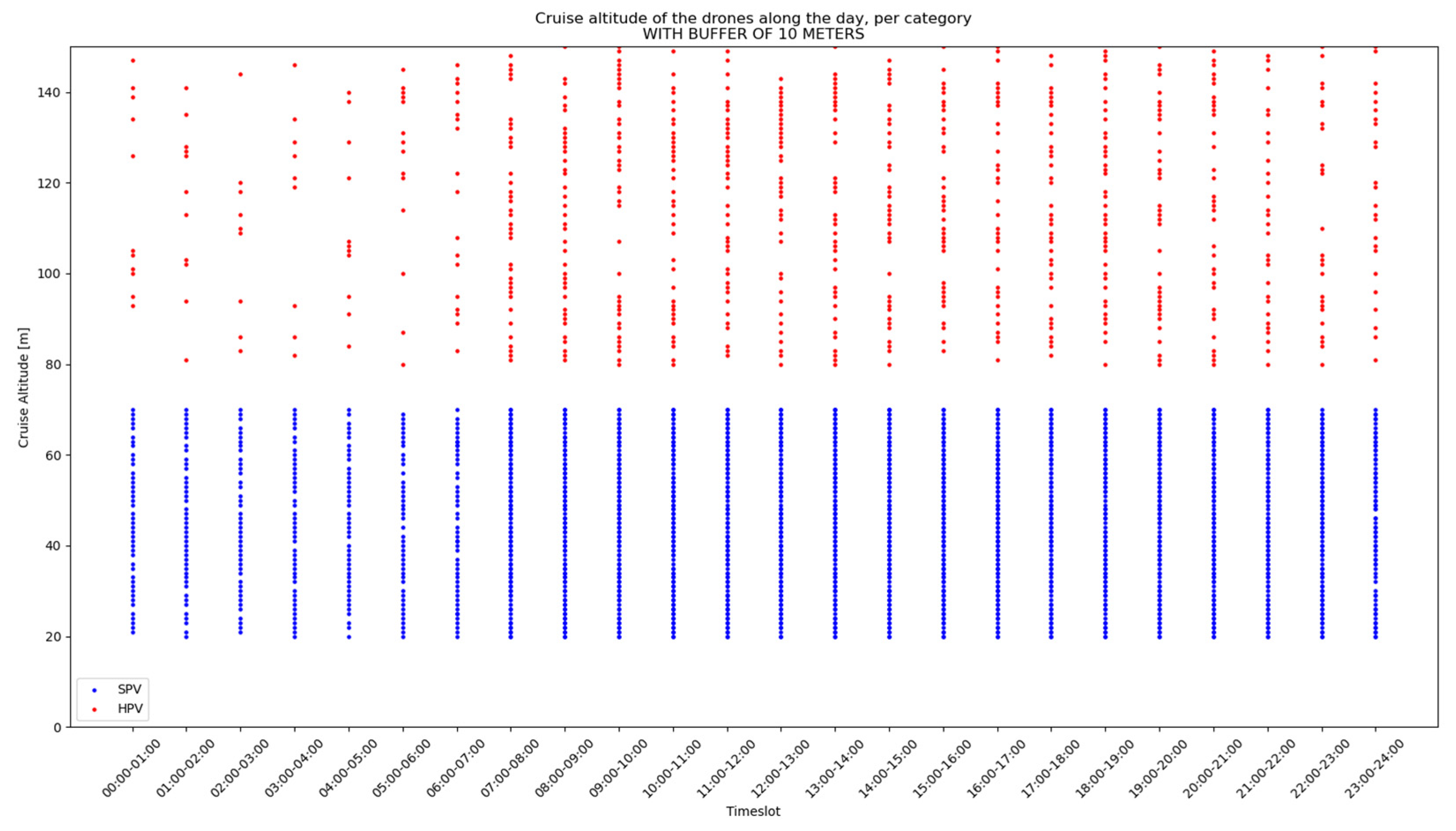
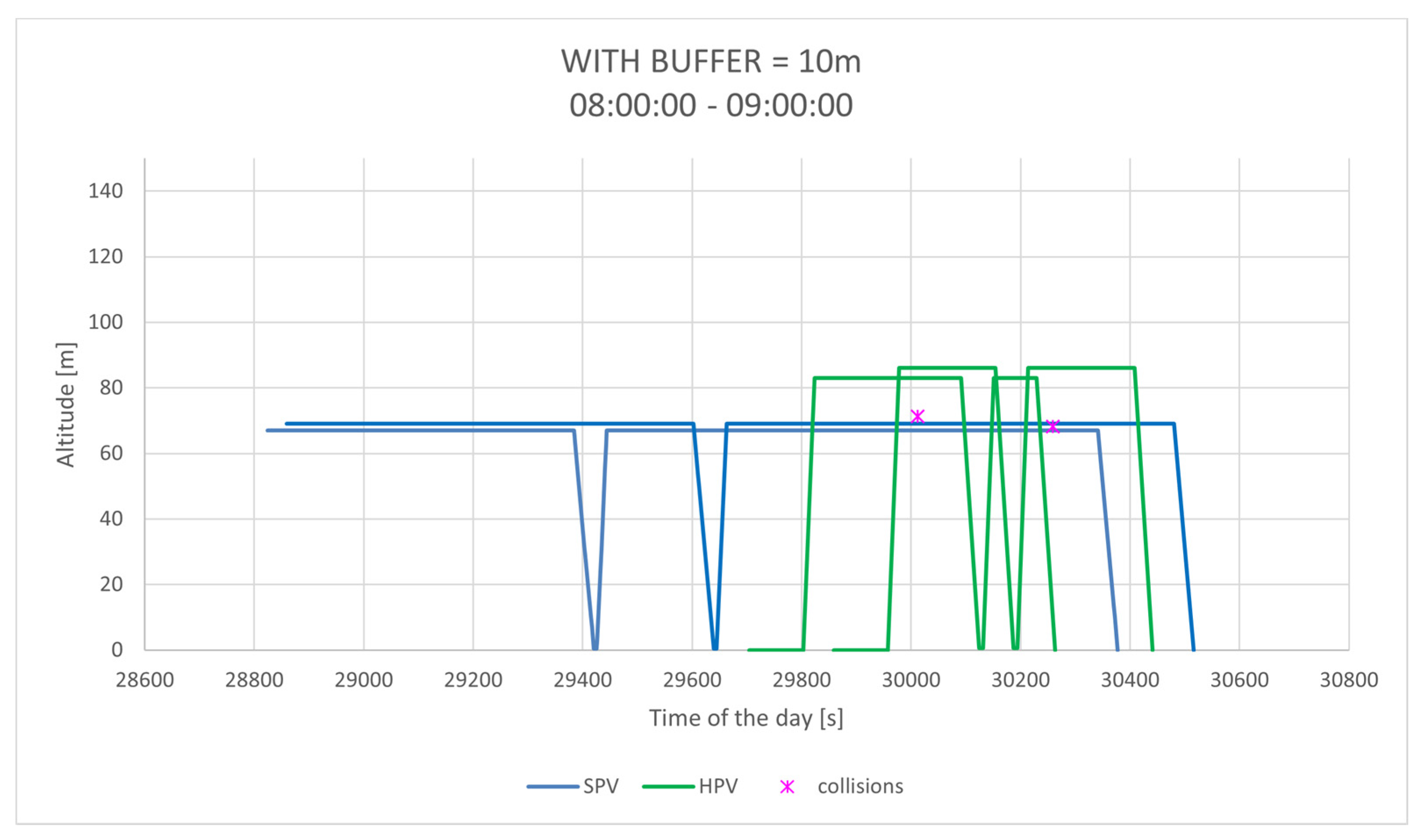
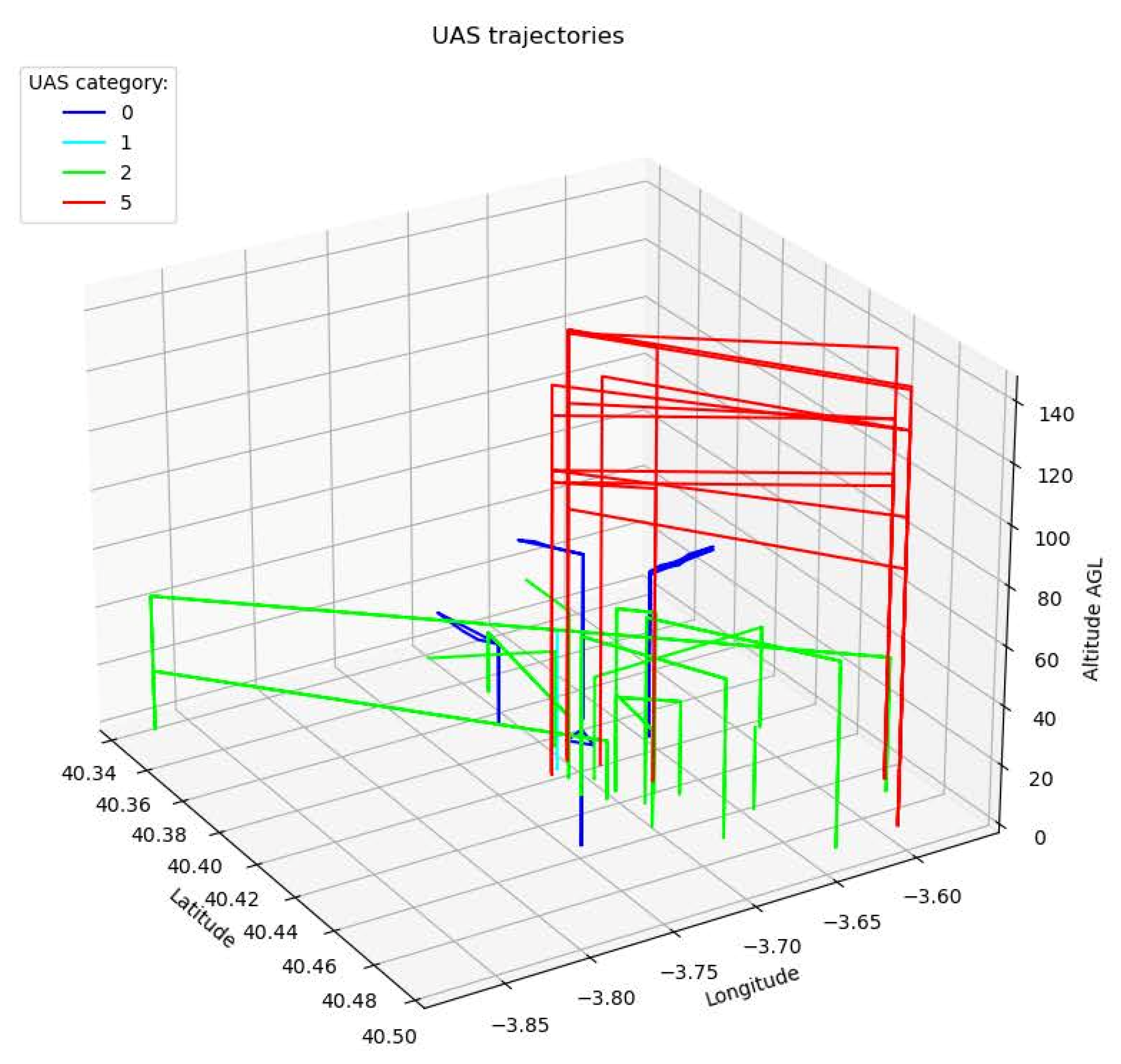
- Buffer 10 m: HPVs and SPVs are separated into layers with a buffer of 10 m between them (HPVs fly above 80 m and SPVs below 70 m);
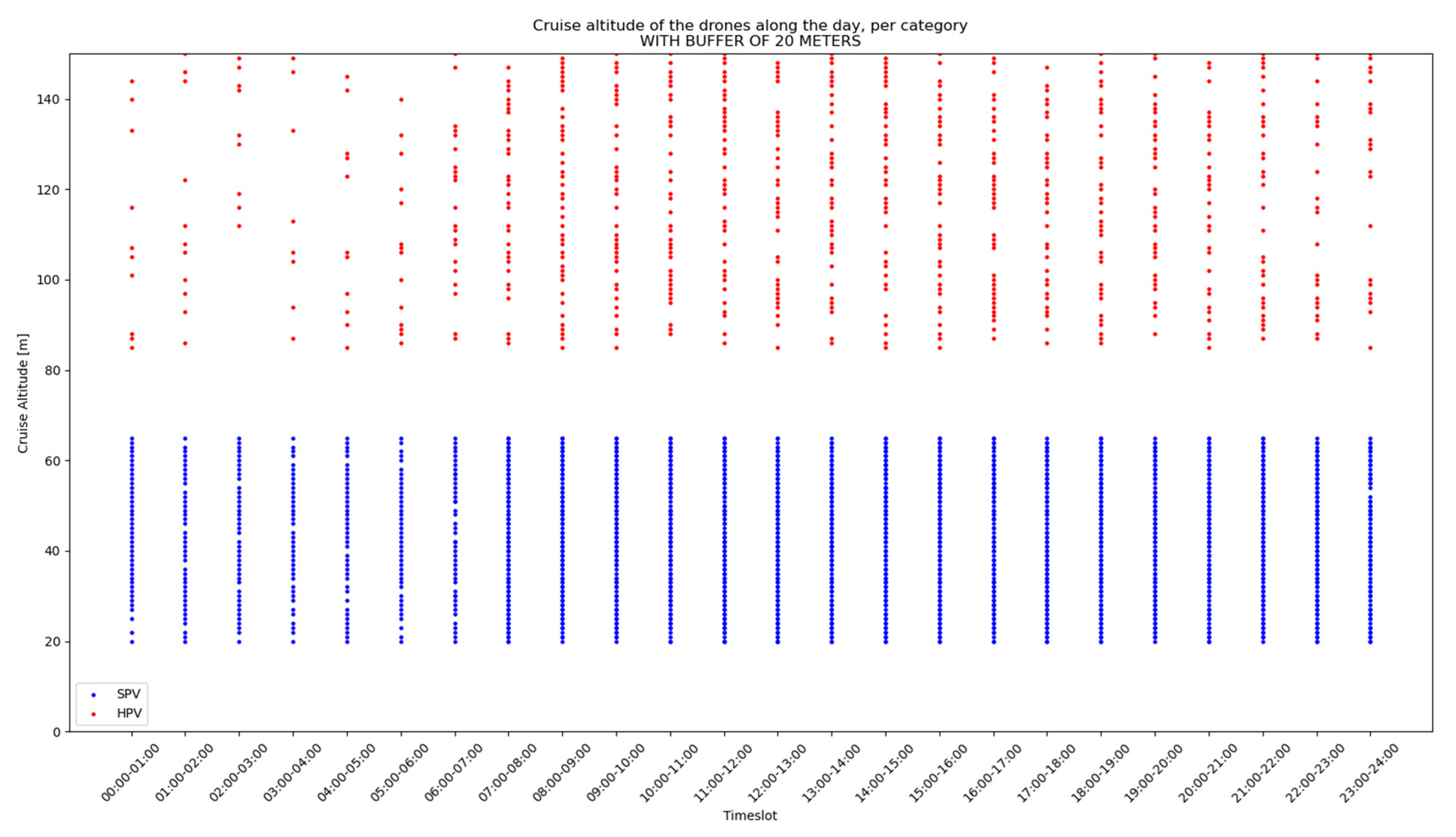
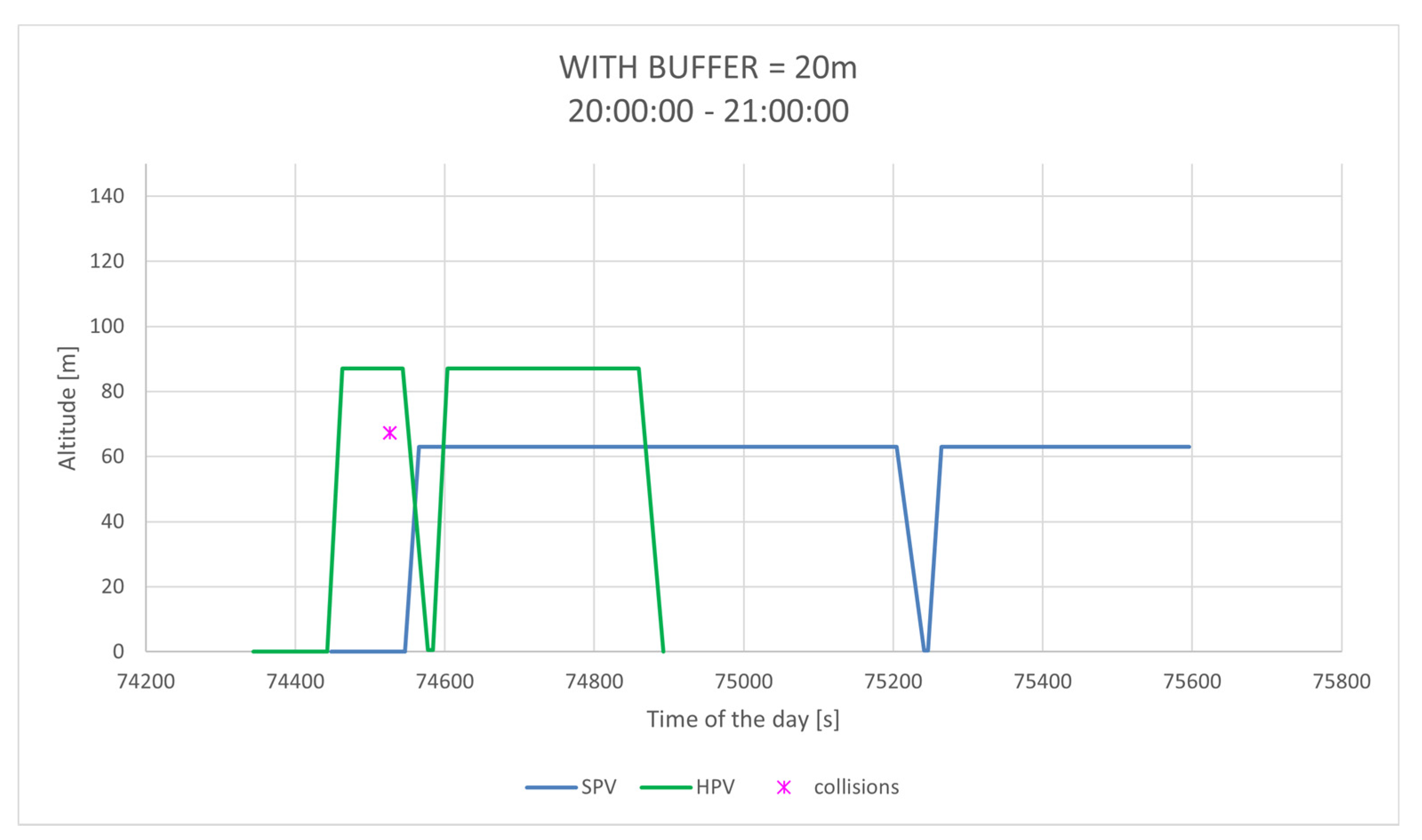
- Buffer 20 m: HPVs and SPVs are separated into layers with a buffer of 20 m between them (HPVs fly above 85 m and SPVs below 65 m);
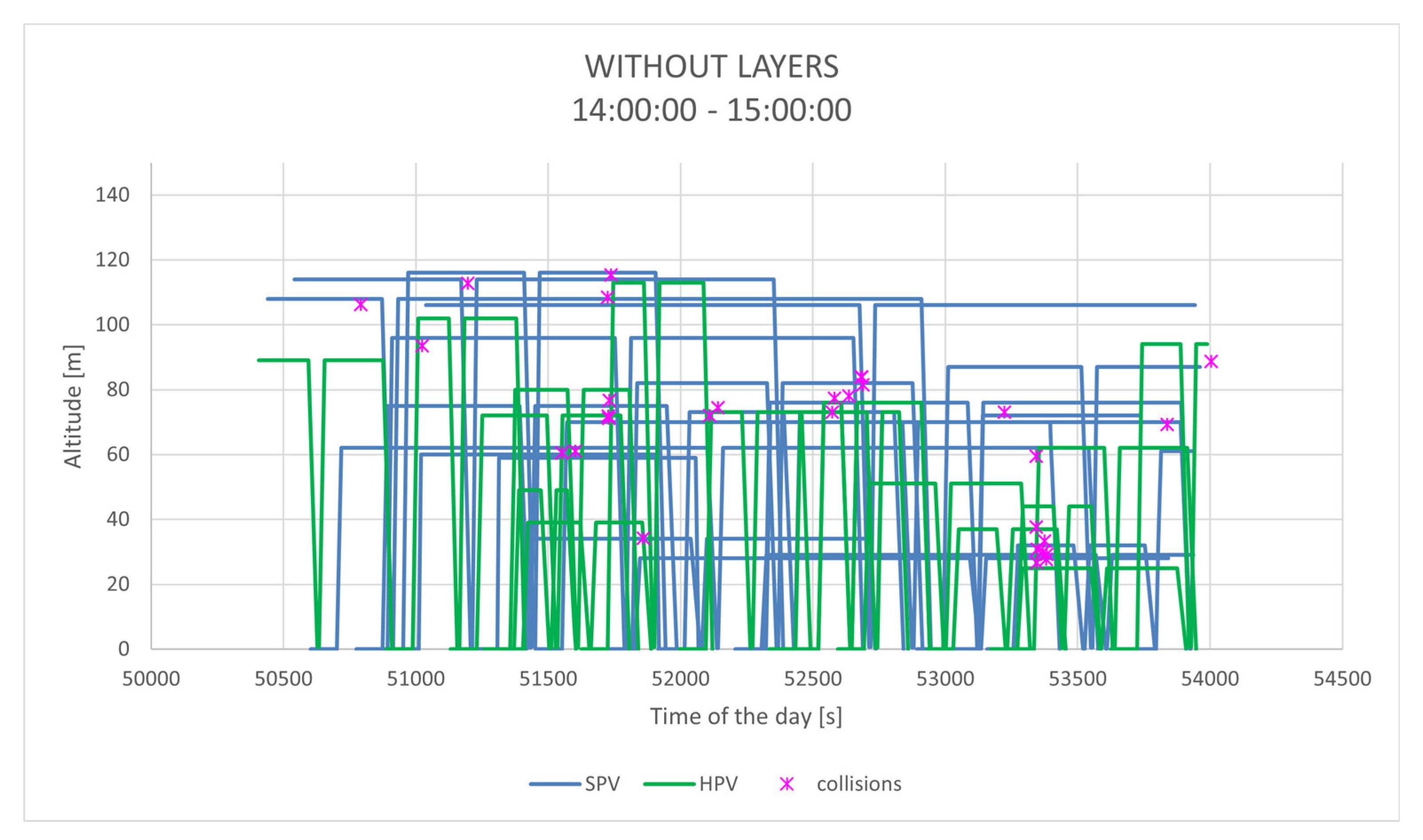
5.1. Without Layers
5.2. With Layers
5.3. Buffer 5 m
5.4. Buffer 10 m
5.5. Buffer 20 m
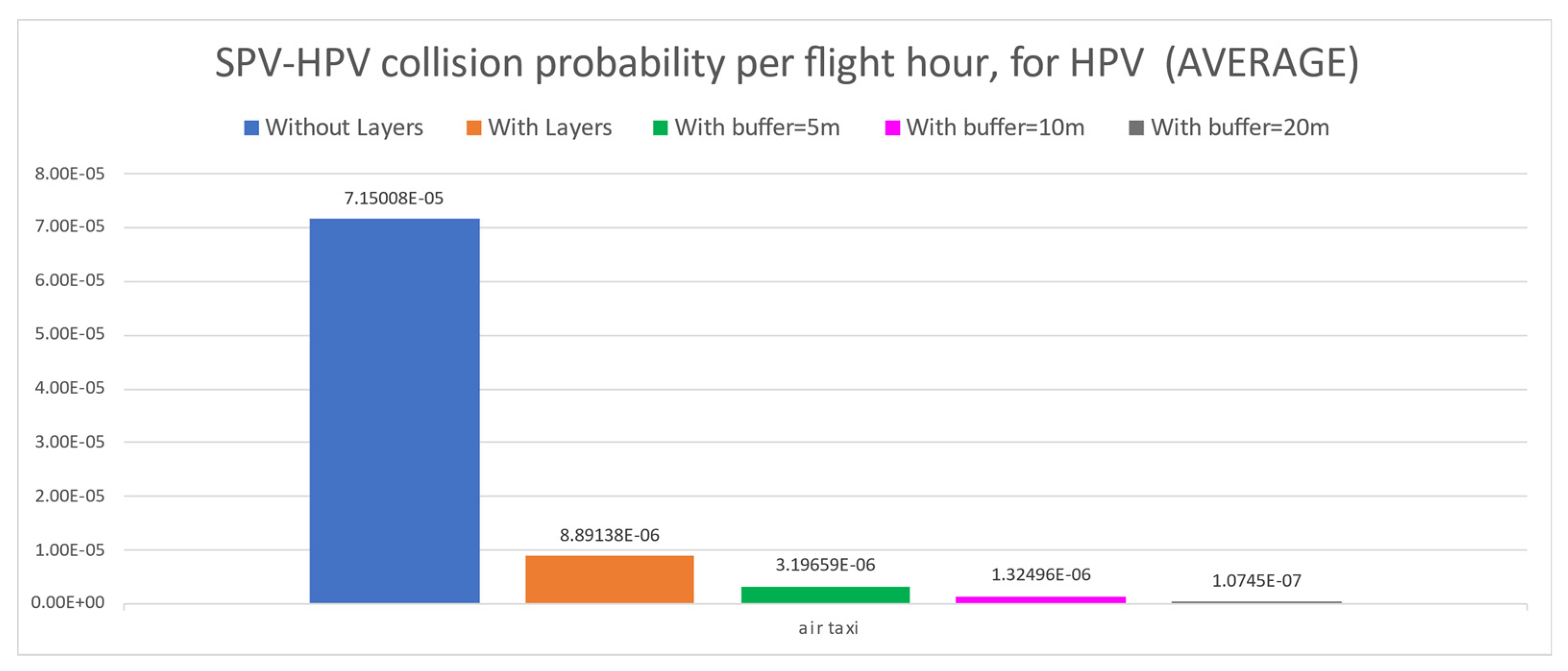
5.6. Summary of Results
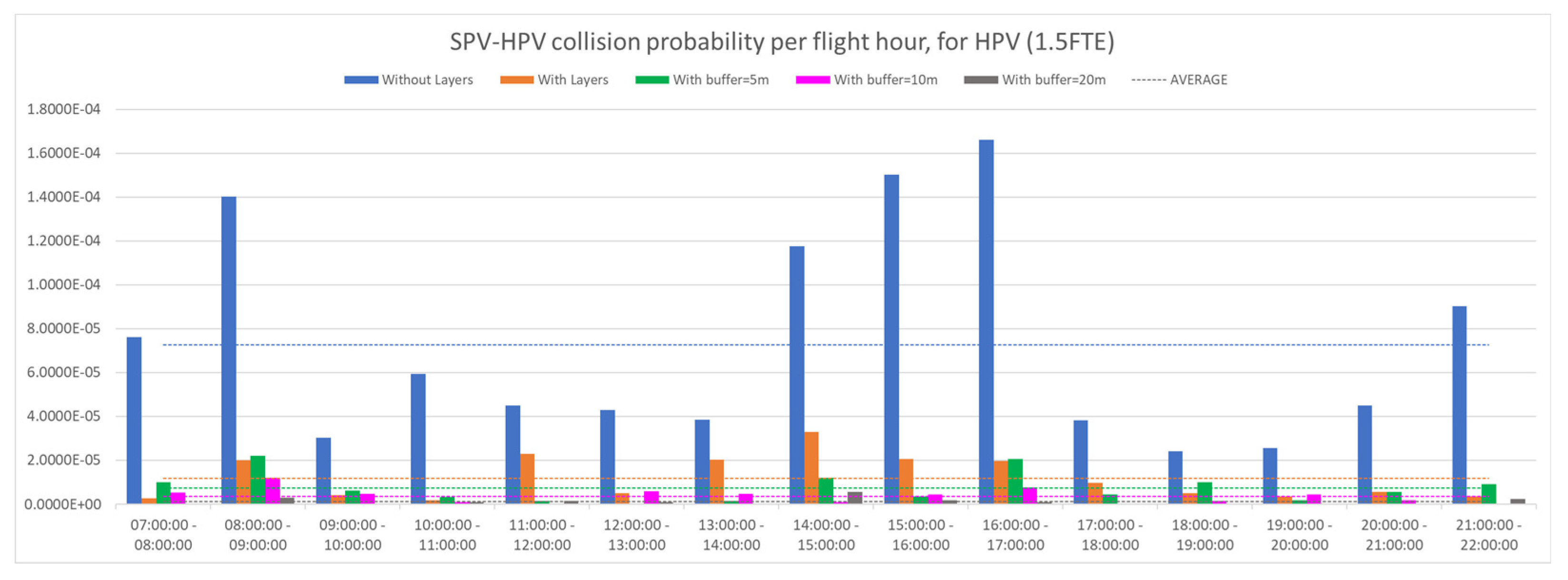
5.7. Sensitivity of Results with Regard to FTE
6. Discussion
Other Considerations
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rothfeld, R.; Straubinger, A.; Fu, M.; Al Haddad, C.; Antoniou, C. Chapter 13—Urban air mobility. In Demand for Emerging Transportation Systems, 1st ed.; Antoniou, C., Efthymiou, D., Chaniotakis, E., Eds.; Elsevier: Amsterdam, The Netherlands, 2020; pp. 267–284. [Google Scholar] [CrossRef]
- Marzouk, O.A. Urban air mobility and flying cars: Overview, examples, prospects, drawbacks, and solutions. Open Eng. 2022, 12, 662–679. [Google Scholar] [CrossRef]
- Reich, C.; Goyal, R.; Cohen, A.; Serrao, J.; Kimmel, S.; Fernando, C.; Shaheen, S. Urban Air Mobility Market Study; National Aeronautics and Space Administration: Washington, DC, USA, 2018; pp. 1–163. Available online: https://ntrs.nasa.gov/citations/20190001472 (accessed on 22 January 2023).
- Grandl, G.; Ostgathe, M.; Cachay, J.; Doppler, S.; Salib, J.; Ross, H. The Future of Vertical Mobility: Sizing the Market for Passenger, Inspection, and Goods Services Until 2035; Porsche Consulting: Stuttgart, Germany, 2018; pp. 1–36. Available online: https://www.porsche-consulting.com/fileadmin/docs/04_Medien/Publikationen/TT1371_The_Future_of_Vertical_Mobility/The_Future_of_Vertical_Mobility_A_Porsche_Consulting_study__C_2018.pdf (accessed on 22 January 2023).
- Roland Berger. Urban Air Mobility: The Rise of a New Mode of Transportation. 2018. Available online: https://www.rolandberger.com/en/Insights/Publications/Passenger-drones-ready-for-take-off.html (accessed on 22 January 2023).
- Brown, C.; Henig, E.; Anderson, J.; Wilkowski, M.; Taylor, J.; Labib, N.; Taspinar, O.; Reut-Gelbart, M. Passenger Use Cases in the Advanced Air Mobility Revolution; KPMG International: Dublin, Ireland, 2022; pp. 1–23. Available online: https://kpmg.com/ie/en/home/insights/2022/04/advanced-air-mobility-revolution-aviation.html (accessed on 22 January 2023).
- Goyal, R.; Reiche, C.; Fernando, C.; Cohen, A. Advanced Air Mobility: Demand Analysis and Market Potential of the Airport Shuttle and Air Taxi Markets. Sustainability 2021, 13, 7421. [Google Scholar] [CrossRef]
- Ahmed, S.S.; Fountas, G.; Eker, U.; Still, S.E.; Anastasopoulos, P.C. An exploratory empirical analysis of willingness to hire and pay for flying taxis and shared flying car services. J. Air Transp. Manag. 2021, 90, 3–13. [Google Scholar] [CrossRef]
- Al Haddad, C.; Chaniotakis, E.; Straubinger, A.; Plötner, K.; Antoniou, C. Factors affecting the adoption and use of urban air mobility. Transp. Res. Part A Policy Pract. 2020, 132, 696–712. [Google Scholar] [CrossRef]
- Kim, N.; Yoon, Y. Regionalization for urban air mobility application with analyses of 3D urban space and geodemography in San Francisco and New York. Procedia Comput. Sci. 2021, 184, 388–395. [Google Scholar] [CrossRef]
- EU. Commission Implementing Regulation (EU) 2019/947 of 24 May 2019 on the Rules and Procedures for the Operation of Unmanned Aircraft. OJ L 152; 11 June 2019. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX%3A32019R0947&qid=1653918578552 (accessed on 22 January 2023).
- EASA. Terms of Reference for Rule Making Task 0230: Introduction of a Regulatory Framework for the Operation of Unmanned Aircraft Systems and for Urban Air Mobility in the European Union Aviation System. 2021. Available online: https://www.easa.europa.eu/en/document-library/terms-of-reference-and-rulemaking-group-compositions/tor-rmt0230 (accessed on 5 February 2023).
- EASA. NPA 2022-06: Introduction of a Regulatory Framework for the Operation of Drones—Enabling Innovative Air Mobility with Manned VTOL-Capable Aircraft, the IAW of UAS Subject to Certification, and the CAW of Those UAS Operated in the ‘Specific’ Category. Available online: https://www.easa.europa.eu/en/document-library/notices-of-proposed-amendment/npa-2022-06 (accessed on 5 February 2023).
- FAA Advanced Air Mobility | Air Taxis. Available online: https://www.faa.gov/air-taxis (accessed on 5 February 2023).
- EASA. SC-VTOL-01: Special Condition for Small-Category VTOL Aircraft. 2019. Available online: https://www.easa.europa.eu/sites/default/files/dfu/SC-VTOL-01.pdf (accessed on 5 February 2023).
- ICAO. Annex 2—Rules of the Air, 10th ed.; ICAO: Montreal, QC, Canada, 2005. [Google Scholar]
- GAMA-IAOPA. European General Aviation Survey. 2021. Available online: https://www.generalaviation.eu/pdf/survey_20_print-v1-4.pdf (accessed on 5 February 2023).
- Tojal, M.; Hesselink, H.; Fransoy, A.; Ventas, E.; Gordo, V.; Xu, Y. Analysis of the definition of Urban Air Mobility—How its attributes impact on the development of the concept. Transp. Res. Procedia 2021, 59, 3–13. [Google Scholar] [CrossRef]
- Bauranov, A.; Rakas, J. Designing airspace for urban air mobility: A review of concepts and approaches. Prog. Aerosp. Sci. 2021, 125, 100726. [Google Scholar] [CrossRef]
- Barrado, C.; Boyero, M.; Brucculeri, L.; Ferrara, G.; Hately, A.; Hullah, P.; Martin-Marrero, D.; Pastor, E.; Rushton, A.P.; Volkert, A. U-Space Concept of Operations: A Key Enabler for Opening Airspace to Emerging Low-Altitude Operations. Aerospace 2020, 7, 24. [Google Scholar] [CrossRef]
- Pons-Prats, J.; Živojinović, T.; Kuljanin, J. On the understanding of the current status of urban air mobility development and its future prospects: Commuting in a flying vehicle as a new paradigm. Transp. Res. Part E Logist. Transp. Rev. 2022, 166, 102868. [Google Scholar] [CrossRef]
- FAA. Urban Air Mobility (UAM) Concept of Operations. V1.0; US Department of Transportation, Office of NextGen: Atlanta, GA, USA, 2020.
- Hoekstra, J.M.; Maas, J.; Tra, M.; Sunil, E. How do layered airspace design parameters affect airspace capacity and Safety? In Proceedings of the 7th International Conference on Research in Air Transportation, Philadelphia, PA, USA, 20–24 June 2016. [Google Scholar]
- AMU-LED Consortium. D2.2—High Level Concept of Operations for UAM; SESAR Joint Undertaking: Brussels, Belgium, 2022. [Google Scholar]
- EU. Commission Implementing Regulation (EU) 2021/664 of 22 April 2021 on a Regulatory Framework for the U-Space. OJ L 139. 23 April 2021. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT—/?uri=CELEX%3A32021R0664 (accessed on 20 February 2023).
- EU. Commission Implementing Regulation (EU) 2021/666 of 22 April 2021 Amending Regulation (EU) No 923/2012 as Regards Requirements for Manned Aviation Operating in U-Space Airspace. OJ L 139. 23 April 2021. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX%3A32021R0666 (accessed on 20 February 2023).
- EUROCONTROL. UAS ATM Common Altitude Reference System; EUROCONTROL: Brussels, Belgium, 2018. [Google Scholar]
- FAA. Code of Federal Regulations, Title 14, Chapter I, Subchapter F—Part 107: Small Unmanned Aerial Systems. Available online: https://www.ecfr.gov/current/title-14/chapter-I/subchapter-F/part-107 (accessed on 10 May 2023).
- Janisch, D.; Gordo, V.M.; Jiménez, M.; Sánchez-Escalonilla, P. UAS Collision Risk as Part of U-space Demand and Capacity Balancing. In Proceedings of the SESAR Innovation Days, Online, 7–9 December 2021. [Google Scholar]
- ICAO. Doc 9689-AN/953—Manual on Airspace Planning Methodology for the Determination of Separation Minima, 1st ed.; International Civil Aviation Organization: Montreal, QC, Canada, 1998; Available online: https://www.icao.int/Meetings/anconf12/Document%20Archive/9689_cons_en.pdf (accessed on 20 February 2023).
- DACUS Consortium. D4.2—DACUS: Validation Test Results, KPI, and Suitability Metrics & Report; SESAR Joint Undertaking: Brussels, Belgium, 2022. [Google Scholar]
- ICAO. Doc 9613—Performance Based Navigation (PBN) Manual, 4th ed.; International Civil Aviation Organization: Montreal, QC, Canada, 2013. [Google Scholar]
- GPS. An Analysis of Global Positioning System Standard Positioning Service Performance for 2020. Available online: https://www.gps.gov/systems/gps/performance/2020-GPS-SPS-performance-analysis.pdf (accessed on 10 February 2023).
- Galileo. Performance Reports. Available online: https://www.gsc-europa.eu/news/galileo-performance-reports-of-q1-2022-available-for-download (accessed on 10 February 2023).
- NTSB. WAAS Quarterly Performance Analysis Report. Available online: https://www.nstb.tc.faa.gov/reports/2022_Q2_FAA_WAAS_PAN_Report_81_v1.0.pdf (accessed on 10 February 2023).
- ESSP. EGNOS Service Provision Yearly Report. Available online: https://egnos-user-support.essp-sas.eu/documents/egnos-service-provision-yearly-report-2021-2022 (accessed on 10 February 2023).
- Septentrio. AsteRx-iS UAS Datasheet. Available online: https://pdf.directindustry.com/pdf/septentrio/asterx-i-s-uas/183002-918468.html (accessed on 10 February 2023).
- U-Blox. M8P Datasheet. Available online: https://www.u-blox.com/sites/default/files/NEO-M8-FW3_DataSheet_UBX-15031086.pdf (accessed on 10 February 2023).
- Trimble. UAS1 Datasheet. Available online: https://assets-trimble.s3.us-west-2.amazonaws.com/wp-content/uploads/2020/09/06231141/Trimble-UAS1_DS_1219_LR.pdf (accessed on 10 February 2023).
- Novatel. OEM7600 Datasheet. Available online: https://hexagondownloads.blob.core.windows.net/public/Novatel/assets/Documents/Papers/OEM7600-Product-Sheet/OEM7600-Product-Sheet.pdf (accessed on 10 February 2023).
- Novatel. OEMStar Datasheet. Available online: https://hexagondownloads.blob.core.windows.net/public/Novatel/assets/Documents/Papers/OEMStar/OEMStar.pdf (accessed on 10 February 2023).
- Furuno. GN-87 Datasheet. Available online: https://furuno.ent.box.com/s/6iatb3vrpms27qqu5un9eznkqjxbc3ze (accessed on 10 February 2023).
- Teseo. LIV-3R Datasheet. Available online: https://www.st.com/en/positioning/teseo-liv3r.html (accessed on 10 February 2023).
- Geister, R.; Limmer, L.; Rippl, M.; Dautermann, T. Total system error performance of drones for an unmanned PBN concept. In Proceedings of the IEEE Integrated Communications, Navigation, Surveillance Conference (ICNS 2018), Herndon, VA, USA, 10–12 April 2018; pp. 2D4-1–2D4-9. [Google Scholar] [CrossRef]
- E-GNSS for Drone Operations WhitePaper, Section 4.1.1 Flight Demonstrations with EGNOS-Enabled Receivers. Available online: https://www.euspa.europa.eu/simplecount_pdf/tracker?file=uploads/drones_operations_whitepaper.pdf (accessed on 10 February 2023).
- Kallinen, V.; Martin, T.; McFadyen, A. Required Navigation Performance Specifications for Unmanned Aircraft Based on UTM Flight Trials. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 196–203. [Google Scholar] [CrossRef]
- REALITY Consortium. REALITY: Empowering Drones with EGNOS—Final Workshop. EUSPA, October 2021. [REALITY—Empowering Drones with EGNOS]—FINAL WORKSHOP (BCN Drone Center, 2021-10-21)—YouTube. Available online: https://www.youtube.com/watch?v=rgRPLjl_108 (accessed on 20 February 2023).
- Lin, X.; Fulton, N.; Westcott, M. Target level of safety measures in air transportation—Review, validation and recommendations. In Proceedings of the IASTED International Conference on Modelling, Simulation, and Identification (MSI 2009), Beijing, China, 12–14 October 2009. [Google Scholar]
- Howard, R.W. Breaking through the 106 barrier. Aeronaut. J. 1992, 96, 260–270. [Google Scholar] [CrossRef]
- Hedayati, R.; Sadighi, M. Statistics. In Bird Strike: An Experimental, Theoretical and Numerical Investigation; Woodhead Publishing: Delhi, India, 2016; pp. 9–33. ISBN 9780081000939. [Google Scholar] [CrossRef]
- Uber Elevate. Fast-Forwarding to a Future of on-Demand Urban Air Transportation. Available online: https://evtol.news/__media/PDFs/UberElevateWhitePaperOct2016.pdf (accessed on 1 April 2023).
- Joby: Results of Noise Tests Show Aircraft Would Be Quiet Enough for Cities. Available online: https://aerospaceamerica.aiaa.org/joby-noise-test-results-show-aircraft-would-be-quiet-enough-for-cities/ (accessed on 1 April 2023).
- How Do You Measure Noise Levels? Available online: https://www.commodious.co.uk/knowledge-bank/hazards/noise/measuring-levels (accessed on 1 April 2023).
- Delta. Typically Noise Levels. Available online: https://eng.mst.dk/media/mst/69037/typically_noise_levels_1175.1.11.pdf (accessed on 1 April 2023).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle–Receiver | NSE_H RMS1 | NSE_V RMS1 | NSE_H 1 95% | NSE_V 95% |
|---|---|---|---|---|
| SPV (GPS L1) | 1.63 | 2.55 | 3.994 | 4.998 |
| HPV (GPS/Galileo + SBAS) | 1.02 | 1.1 | 2.499 | 2.156 |
| Vehicle | FTE_H 1 95% | FTE_V 95% |
|---|---|---|
| SPV | 1.5 | 3.0 |
| HPV | 6.5 | 7.0 |
| Time Frame | Air Taxi Flight Time (h) | All UAS Flight Time (h) | Iterations | HPV-SPV Collisions | Collision Risk |
|---|---|---|---|---|---|
| 07:00:00–08:00:00 | 3.67 | 79.77 | 5000 | 73 | 6.6256 × 10−5 |
| 08:00:00–09:00:00 | 4.66 | 166.56 | 5000 | 212 | 1.5172 × 10−4 |
| 09:00:00–10:00:00 | 4.84 | 115.01 | 5000 | 26 | 1.7900 × 10−5 |
| 10:00:00–11:00:00 | 3.92 | 92.22 | 5000 | 58 | 4.9311 × 10−5 |
| 11:00:00–12:00:00 | 4.21 | 99.02 | 5000 | 27 | 2.1388 × 10−5 |
| 12:00:00–13:00:00 | 3.89 | 96.78 | 5000 | 53 | 4.5417 × 10−5 |
| 13:00:00–14:00:00 | 4.77 | 110.17 | 5000 | 38 | 2.6553 × 10−5 |
| 14:00:00–15:00:00 | 4.14 | 144.77 | 5000 | 152 | 1.2249 × 10−4 |
| 15:00:00–16:00:00 | 3.73 | 124.73 | 5000 | 172 | 1.5391 × 10−4 |
| 16:00:00–17:00:00 | 3.87 | 155.06 | 5000 | 172 | 1.4809 × 10−4 |
| 17:00:00–18:00:00 | 4.45 | 99.96 | 5000 | 61 | 4.5644 × 10−5 |
| 18:00:00–19:00:00 | 4.03 | 104.02 | 5000 | 44 | 3.6426 × 10−5 |
| 19:00:00–20:00:00 | 3.79 | 100.95 | 5000 | 33 | 2.9021 × 10−5 |
| 20:00:00–21:00:00 | 3.56 | 94.84 | 5000 | 48 | 4.4897 × 10−5 |
| 21:00:00–22:00:00 | 2.88 | 94.28 | 5000 | 98 | 1.1349 × 10−4 |
| Average | 6.9914 × 10−5 |
| Time Frame | Air Taxi Flight Time (h) | All UAS Flight Time (h) | Iterations | HPV-SPV Collisions | Collision Risk |
|---|---|---|---|---|---|
| 07:00:00–08:00:00 | 3.67 | 79.77 | 5000 | 2 | 1.8152 × 10−6 |
| 08:00:00–09:00:00 | 4.66 | 166.56 | 5000 | 8 | 5.7254 × 10−6 |
| 09:00:00–10:00:00 | 4.84 | 115.01 | 5000 | 2 | 1.3769 × 10−6 |
| 10:00:00–11:00:00 | 3.92 | 92.22 | 5000 | 4 | 3.4008 × 10−6 |
| 11:00:00–12:00:00 | 4.21 | 99.02 | 5000 | 36 | 2.8517 × 10−5 |
| 12:00:00–13:00:00 | 3.89 | 96.78 | 5000 | 5 | 4.2846 × 10−6 |
| 13:00:00–14:00:00 | 4.77 | 110.17 | 5000 | 22 | 1.5373 × 10−5 |
| 14:00:00–15:00:00 | 4.14 | 144.77 | 5000 | 57 | 4.5935 × 10−5 |
| 15:00:00–16:00:00 | 3.73 | 124.73 | 5000 | 4 | 3.5793 × 10−6 |
| 16:00:00–17:00:00 | 3.87 | 155.06 | 5000 | 8 | 6.8877 × 10−6 |
| 17:00:00–18:00:00 | 4.45 | 99.96 | 5000 | 7 | 5.2379 × 10−6 |
| 18:00:00–19:00:00 | 4.03 | 104.02 | 5000 | 4 | 3.3114 × 10−6 |
| 19:00:00–20:00:00 | 3.79 | 100.95 | 5000 | 4 | 3.5178 × 10−6 |
| 20:00:00–21:00:00 | 3.56 | 94.84 | 5000 | 1 | 9.3535 × 10−7 |
| 21:00:00–22:00:00 | 2.88 | 94.28 | 5000 | 3 | 3.4741 × 10−6 |
| Average | 9.2151 × 10−6 |
| Time Frame | Air Taxi Flight Time (h) | All UAS Flight Time (h) | Iterations | HPV-SPV Collisions | Collision Risk |
|---|---|---|---|---|---|
| 07:00:00–08:00:00 | 3.67 | 79.77 | 5000 | 8 | 7.2609 × 10−6 |
| 08:00:00–09:00:00 | 4.66 | 166.56 | 5000 | 5 | 3.5784 × 10−6 |
| 09:00:00–10:00:00 | 4.84 | 115.01 | 5000 | 2 | 1.3769 × 10−6 |
| 10:00:00–11:00:00 | 3.92 | 92.22 | 5000 | 3 | 2.5506 × 10−6 |
| 11:00:00–12:00:00 | 4.21 | 99.02 | 5000 | 2 | 1.5843 × 10−6 |
| 12:00:00–13:00:00 | 3.89 | 96.78 | 5000 | 0 | 0.0000 |
| 13:00:00–14:00:00 | 4.77 | 110.17 | 5000 | 2 | 1.3975 × 10−6 |
| 14:00:00–15:00:00 | 4.14 | 144.77 | 5000 | 6 | 4.8353 × 10−6 |
| 15:00:00–16:00:00 | 3.73 | 124.73 | 5000 | 1 | 8.9483 × 10−7 |
| 16:00:00–17:00:00 | 3.87 | 155.06 | 5000 | 11 | 9.4706 × 10−6 |
| 17:00:00–18:00:00 | 4.45 | 99.96 | 5000 | 2 | 1.4965 × 10−6 |
| 18:00:00–19:00:00 | 4.03 | 104.02 | 5000 | 5 | 4.1393 × 10−6 |
| 19:00:00–20:00:00 | 3.79 | 100.95 | 5000 | 3 | 2.6383 × 10−6 |
| 20:00:00–21:00:00 | 3.56 | 94.84 | 5000 | 1 | 9.3535 × 10−7 |
| 21:00:00–22:00:00 | 2.88 | 94.28 | 5000 | 5 | 5.7902 × 10−6 |
| Average | 3.0901 × 10−6 |
| Time Frame | Air Taxi Flight Time (h) | All UAS Flight Time (h) | Iterations | HPV-SPV Collisions | Collision Risk |
|---|---|---|---|---|---|
| 07:00:00–08:00:00 | 3.67 | 79.77 | 5000 | 3 | 2.7228 × 10−6 |
| 08:00:00–09:00:00 | 4.66 | 166.56 | 5000 | 11 | 7.8724 × 10−6 |
| 09:00:00–10:00:00 | 4.84 | 115.01 | 5000 | 1 | 6.8844 × 10−7 |
| 10:00:00–11:00:00 | 3.92 | 92.22 | 5000 | 0 | 0.0000 |
| 11:00:00–12:00:00 | 4.21 | 99.02 | 5000 | 0 | 0.0000 |
| 12:00:00–13:00:00 | 3.89 | 96.78 | 5000 | 0 | 0.0000 |
| 13:00:00–14:00:00 | 4.77 | 110.17 | 5000 | 1 | 6.9875 × 10−7 |
| 14:00:00–15:00:00 | 4.14 | 144.77 | 5000 | 1 | 8.0588 × 10−7 |
| 15:00:00–16:00:00 | 3.73 | 124.73 | 5000 | 3 | 2.6845 × 10−6 |
| 16:00:00–17:00:00 | 3.87 | 155.06 | 5000 | 0 | 0.0000 |
| 17:00:00–18:00:00 | 4.45 | 99.96 | 5000 | 0 | 0.0000 |
| 18:00:00–19:00:00 | 4.03 | 104.02 | 5000 | 1 | 8.2786 × 10−7 |
| 19:00:00–20:00:00 | 3.79 | 100.95 | 5000 | 3 | 2.6383 × 10−6 |
| 20:00:00–21:00:00 | 3.56 | 94.84 | 5000 | 1 | 9.3535 × 10−7 |
| 21:00:00–22:00:00 | 2.88 | 94.28 | 5000 | 0 | 0.0000 |
| Average | 1.3795 × 10−6 |
| Time Frame | Air Taxi Flight Time (h) | All UAS Flight Time (h) | Iterations | HPV-SPV Collisions | Collision Risk |
|---|---|---|---|---|---|
| 07:00:00–08:00:00 | 3.67 | 79.77 | 5000 | 0 | 0 |
| 08:00:00–09:00:00 | 4.66 | 166.56 | 5000 | 0 | 0 |
| 09:00:00–10:00:00 | 4.84 | 115.01 | 5000 | 0 | 0 |
| 10:00:00–11:00:00 | 3.92 | 92.22 | 5000 | 0 | 0 |
| 11:00:00–12:00:00 | 4.21 | 99.02 | 5000 | 0 | 0 |
| 12:00:00–13:00:00 | 3.89 | 96.78 | 5000 | 0 | 0 |
| 13:00:00–14:00:00 | 4.77 | 110.17 | 5000 | 0 | 0 |
| 14:00:00–15:00:00 | 4.14 | 144.77 | 5000 | 2 | 1.61175 × 10−6 |
| 15:00:00–16:00:00 | 3.73 | 124.73 | 5000 | 0 | 0 |
| 16:00:00–17:00:00 | 3.87 | 155.06 | 5000 | 0 | 0 |
| 17:00:00–18:00:00 | 4.45 | 99.96 | 5000 | 0 | 0 |
| 18:00:00–19:00:00 | 4.03 | 104.02 | 5000 | 0 | 0 |
| 19:00:00–20:00:00 | 3.79 | 100.95 | 5000 | 0 | 0 |
| 20:00:00–21:00:00 | 3.56 | 94.84 | 5000 | 0 | 0 |
| 21:00:00–22:00:00 | 2.88 | 94.28 | 5000 | 0 | 0 |
| Average | 1.10361 × 10−7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gordo, V.; Becerra, I.; Fransoy, A.; Ventas, E.; Menendez-Ponte, P.; Xu, Y.; Tojal, M.; Perez-Castan, J.; Perez Sanz, L. A Layered Structure Approach to Assure Urban Air Mobility Safety and Efficiency. Aerospace 2023, 10, 609. https://doi.org/10.3390/aerospace10070609
Gordo V, Becerra I, Fransoy A, Ventas E, Menendez-Ponte P, Xu Y, Tojal M, Perez-Castan J, Perez Sanz L. A Layered Structure Approach to Assure Urban Air Mobility Safety and Efficiency. Aerospace. 2023; 10(7):609. https://doi.org/10.3390/aerospace10070609
Chicago/Turabian StyleGordo, Victor, Ines Becerra, Alejandro Fransoy, Enrique Ventas, Pablo Menendez-Ponte, Yan Xu, Marta Tojal, Javier Perez-Castan, and Luis Perez Sanz. 2023. "A Layered Structure Approach to Assure Urban Air Mobility Safety and Efficiency" Aerospace 10, no. 7: 609. https://doi.org/10.3390/aerospace10070609
APA StyleGordo, V., Becerra, I., Fransoy, A., Ventas, E., Menendez-Ponte, P., Xu, Y., Tojal, M., Perez-Castan, J., & Perez Sanz, L. (2023). A Layered Structure Approach to Assure Urban Air Mobility Safety and Efficiency. Aerospace, 10(7), 609. https://doi.org/10.3390/aerospace10070609