
Rapid Parametric CAx Tools for Modelling Morphing Wings of Micro Air Vehicles (MAVs)

 , , , , and
, , , , and
Abstract
1. Introduction
2. Geometric Kernel
3. Software Architecture
3.1. Airfoil Parameterization
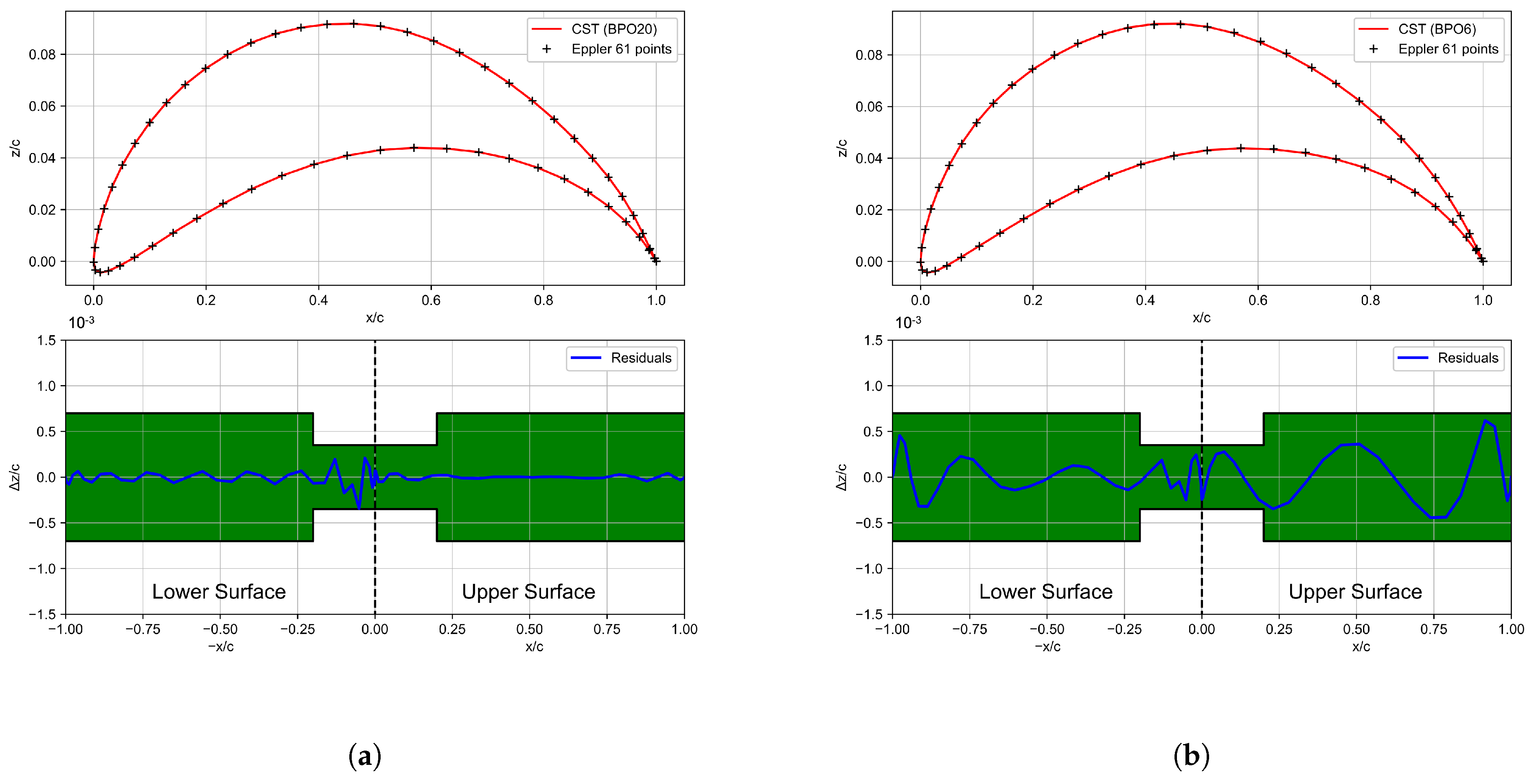
3.1.1. CST Method Theory
3.1.2. CST as a Filter
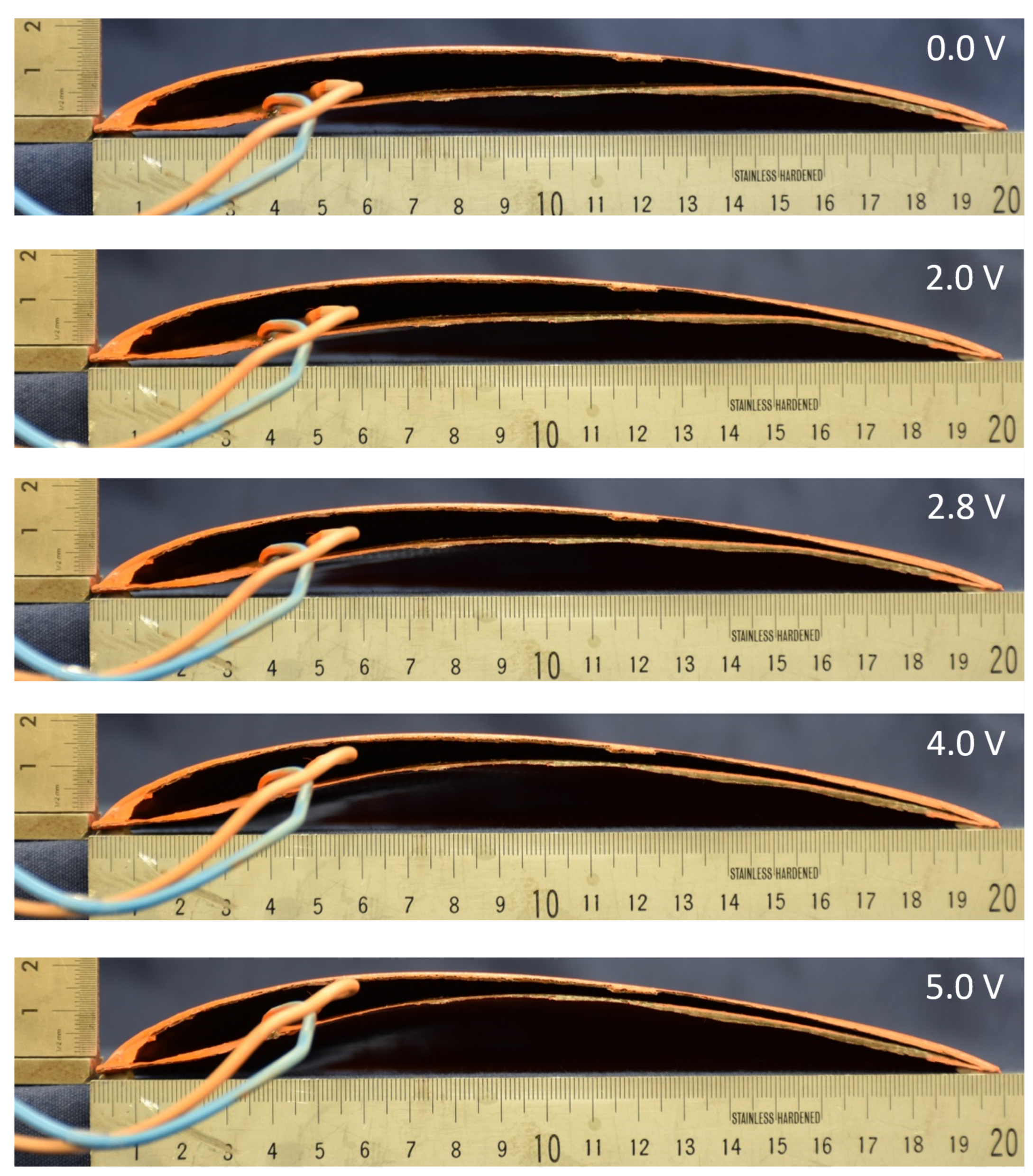
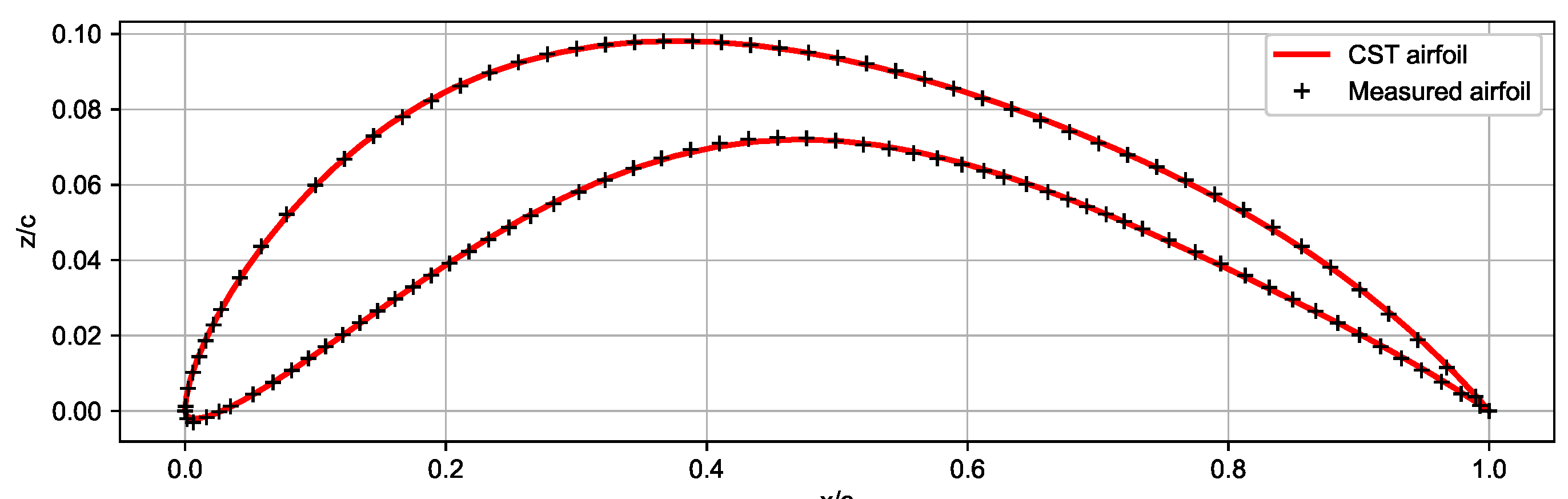
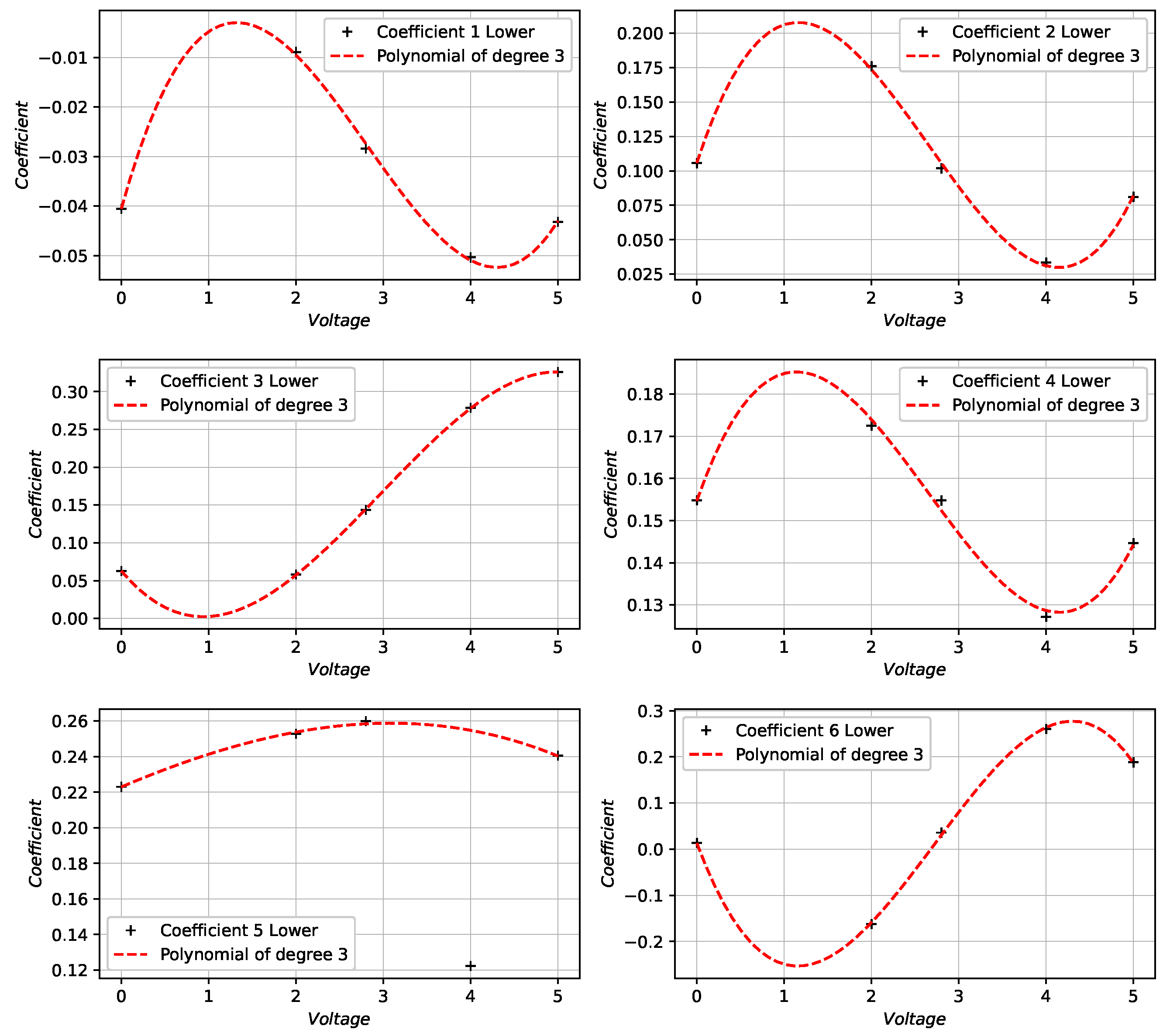
3.1.3. Actuator Effect Parameterization
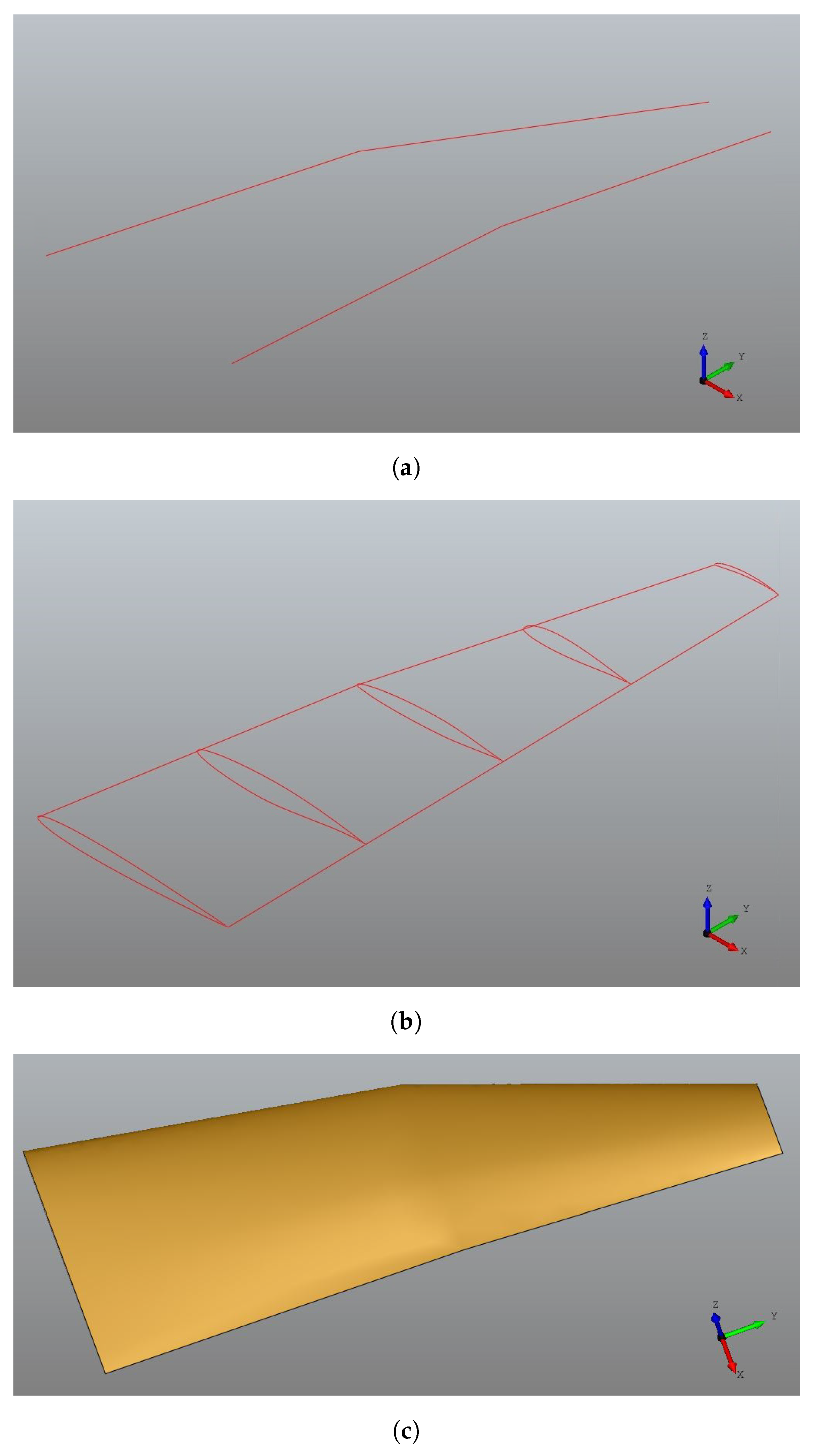
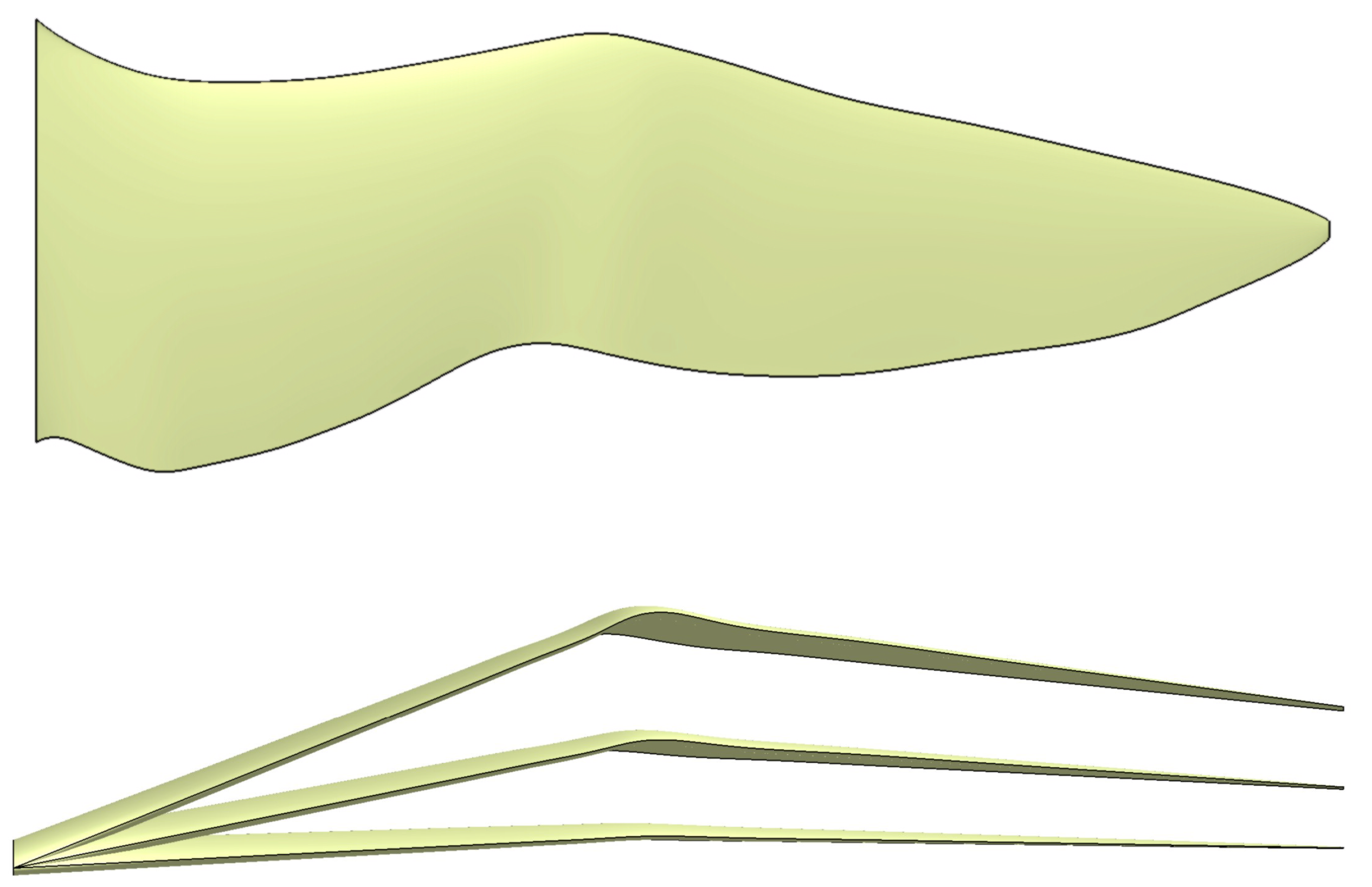
3.2. Wing Parameterization
4. Software Application
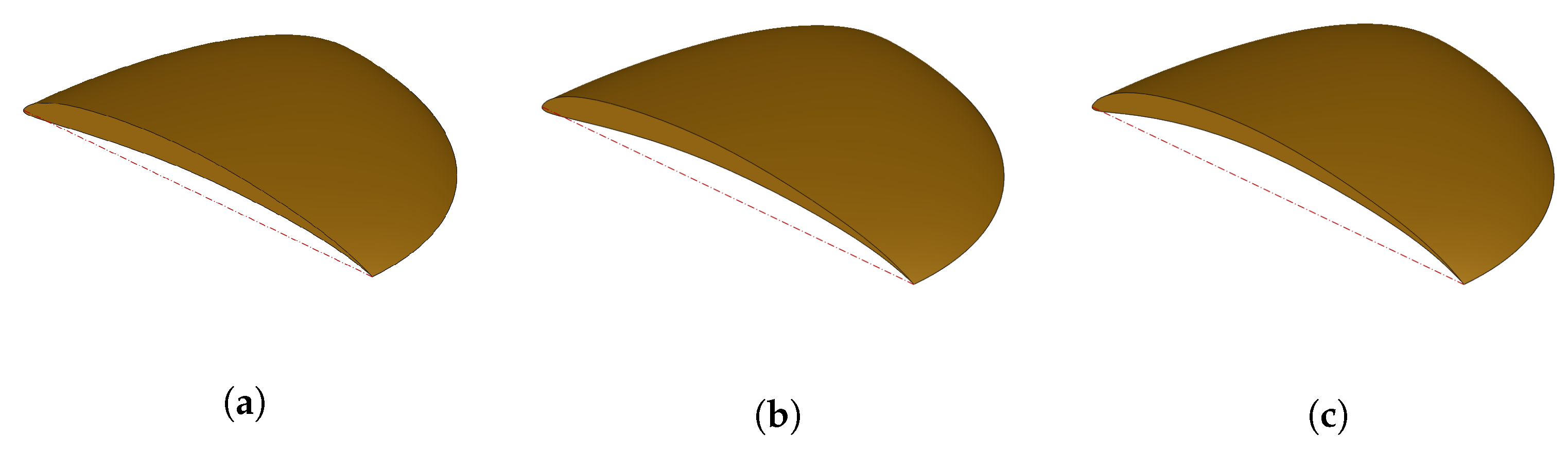
5. Bioinspired Configurations
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ACIS | Geometric modelling kernel developed by Spatial Corporation |
| BPO | Bernstein Polynomials Order |
| CAD | Computer Aided Design |
| CFD | Computational Fluid Dynamics |
| CPACS | Common Parametric Aircraft Configuration Schema |
| CST | Class-Shape Transformation |
| DLR | Deutsches Zentrum für Luft- und Raumfahrt |
| IGES | Initial Graphics Exchange Specification |
| MAV | Micro Air Vehicle |
| MFC | Macro Fibre Composite |
| NASA | National Aeronautics and Space Administration |
| NURBS | Non-Uniform Rational Basis Spline |
| PHIGS | Programmer’s Hierarchical Interactive Graphics System |
| RPAS | Remotely Piloted Aircraft System |
| STEP | Standard for the Exchange of Product Model Data |
| STL | Standard Tessellation Language |
| b | Wingspan |
| c | Local chord |
| Sweep Angle | |
| Dihedral | |
| Wing twist | |
| C | B-Spline curve |
| B-Spline basis functions | |
| B-Spline control points | |
| s | B-Spline surface |
| Profiles interpolation surface | |
| Guide curves interpolation surface | |
| T | Surface that interpolates intersection points between and |
| S | Shape function |
| Shape function coefficients | |
| Binomial coefficients | |
| Class function | |
| Class function coefficients | |
| Relative to upper surface | |
| Relative to lower surface | |
| Non-dimensional airfoil station | |
| Non-dimensional airfoil ordinate | |
| Non-dimensional trailing edge thickness | |
| Leading edge coefficient |
References
- Lampton, A.; Niksch, A.; Valasek, J. Morphing airfoils with four morphing parameters. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008; p. 7282. [Google Scholar]
- Barbarino, S.; Bilgen, O.; Ajaj, R.M.; Friswell, M.I.; Inman, D.J. A review of morphing aircraft. J. Intell. Mater. Syst. Struct. 2011, 22, 823–877. [Google Scholar] [CrossRef]
- Łukaszewicz, A.; Szafran, K.; Józwik, J. CAx techniques used in UAV design process. In Proceedings of the 2020 IEEE 7th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Pisa, Italy, 22–24 June 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 95–98. [Google Scholar]
- Shokirov, R.; Abdujabarov, N.; Takhirov, J.; Bobomurodov, S. Automated design of the appearance of an unmanned aerial vehicle. In Proceedings of the AIP Conference Proceedings, Adelaide, Australia, 11–16 December 2022; AIP Publishing LLC: Melville, NY, USA, 2022; Volume 2432, p. 030088. [Google Scholar]
- Dankwort, C.W.; Weidlich, R.; Guenther, B.; Blaurock, J.E. Engineers’ CAx education—It’s not only CAD. Comput.-Aided Des. 2004, 36, 1439–1450. [Google Scholar] [CrossRef]
- Łukaszewicz, A.; Skorulski, G.; Szczebiot, R. The main aspects of training in the field of computer-aided techniques (CAx) in mechanical engineering. In Proceedings of the 17th International Scientific Conference on Engineering for Rural Development, Jelgava, Latvia, 23–25 May 2018; pp. 865–870. [Google Scholar]
- De Marco, A.; Di Stasio, M.; Della Vecchia, P.; Trifari, V.; Nicolosi, F. Automatic modeling of aircraft external geometries for preliminary design workflows. Aerosp. Sci. Technol. 2020, 98, 105667. [Google Scholar] [CrossRef]
- Chambers, P.; Sóbester, A. Aircraft Topology Generation via Recursive Component Fitting Operators. In Proceedings of the 18th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Denver, CO, USA, 5–9 June 2017; p. 4327. [Google Scholar]
- Soulat, M.E. Parametric geometry representation to support aircraft design. In Proceedings of the 2012 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 1–17. [Google Scholar]
- Hahn, A. Vehicle sketch pad: A parametric geometry modeler for conceptual aircraft design. In Proceedings of the 48th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2010; p. 657. [Google Scholar]
- McDonald, R.A.; Gloudemans, J.R. Open vehicle sketch pad: An open source parametric geometry and analysis tool for conceptual aircraft design. In Proceedings of the AIAA SciTech 2022 Forum, San Diego, CA, USA, 3–7 January 2022; p. 4. [Google Scholar]
- Smith, H.; Sziroczák, D.; Abbe, G.; Okonkwo, P. The GENUS aircraft conceptual design environment. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 2932–2947. [Google Scholar] [CrossRef]
- Siggel, M.; Kleinert, J.; Stollenwerk, T.; Maierl, R. TiGL: An open source computational geometry library for parametric aircraft design. Math. Comput. Sci. 2019, 13, 367–389. [Google Scholar] [CrossRef]
- Gagnon, H.; Zingg, D.W. Geometry generation of complex unconventional aircraft with application to high-fidelity aerodynamic shape optimization. In Proceedings of the 21st AIAA Computational Fluid Dynamics Conference, San Diego, CA, USA, 24–27 June 2013; p. 2850. [Google Scholar]
- Bardera, R.; Rodríguez-Sevillano, Á.; Barderas, E.B.; Casati, M.J. Rapid prototyping by additive manufacturing of a bioinspired micro-RPA morphing model for a wind tunnel test campaign. In Proceedings of the AIAA AVIATION 2022 Forum, Chicago, IL, USA, 27 June–1 July 2022; p. 4130. [Google Scholar]
- Larsson, R.; Ringertz, U.; Lundström, D.; Sobron, A. Rapid prototyping in aircraft design using cfd, wind tunnel and flight testing. In Proceedings of the 33rd Congress of the International Council of the Aeronautical Sciences, Stockholm, Sweden, 4–9 September 2022. [Google Scholar]
- OpenCASCADE Technology. 2021. Available online: https://www.opencascade.com/ (accessed on 19 December 2022).
- PythonOCC. 2021. Available online: https://github.com/tpaviot/pythonocc (accessed on 19 December 2022).
- Gordon, W.J. Spline-blended surface interpolation through curve networks. J. Math. Mech. 1969, 18, 931–952. [Google Scholar]
- Kulfan, B.; Bussoletti, J. Fundamental Parameteric Geometry Representations for Aircraft Component Shapes. In Proceedings of the 11th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Portsmouth, VA, USA, 6–8 September 2006; p. 6948. [Google Scholar]
- Padulo, M.; Maginot, J.; Guenov, M.; Holden, C. Airfoil design under uncertainty with robust geometric parameterization. In Proceedings of the 50th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference 17th AIAA/ASME/AHS Adaptive Structures Conference 11th AIAA No, Palm Springs, CA, USA, 4–7 May 2009; p. 2270. [Google Scholar]
- Kulfan, B.M. Universal parametric geometry representation method. J. Aircr. 2008, 45, 142–158. [Google Scholar] [CrossRef]
- Kulfan, B. Modification of CST Airfoil Representation Methodology. 2009. Available online: http://www.brendakulfan.com/docs/CST8.pdf (accessed on 19 December 2022).
- Site, U.A.D. 2021. Available online: https://m-selig.ae.illinois.edu/ads.html (accessed on 19 December 2022).
- Sóbester, A.; Forrester, A.I. Aircraft Aerodynamic Design: Geometry and Optimization; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Li, H.; Ang, H. Preliminary airfoil design of an innovative adaptive variable camber compliant wing. J. Vibroeng. 2016, 18, 1861–1873. [Google Scholar] [CrossRef]
- De Gaspari, A.; Ricci, S. Knowledge-based shape optimization of morphing wing for more efficient aircraft. Int. J. Aerosp. Eng. 2015, 2015, 325724. [Google Scholar] [CrossRef]
- Barcala-Montejano, M.; Rodríguez-Sevillano, A.; Crespo-Moreno, J.; Bardera-Mora, R.; Silva-González, A. Optimized performance of a morphing micro air vehicle. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 794–800. [Google Scholar]
- Bardera, R.; Rodríguez-Sevillano, Á.A.; Barroso, E. Numerical and Experimental Study of Aerodynamic Performances of a Morphing Micro Air Vehicle. Appl. Mech. 2021, 2, 442–459. [Google Scholar] [CrossRef]
- Burns, T.; Mueller, T. Experimental studies of the Eppler 61 airfoil at low Reynolds numbers. In Proceedings of the 20th Aerospace Sciences Meeting, Orlando, FL, USA, 11–14 January 1982; p. 345. [Google Scholar]
- Thipyopas, C.; Moschetta, J.M. A fixed-wing biplane MAV for low speed missions. Int. J. Micro Air Veh. 2009, 1, 13–33. [Google Scholar] [CrossRef]
- Bardera-Mora, R.; Garcia-Magariño, A.; Barroso, E.; Rodriguez-Sevillano, A. Study of Aerodynamic Performances of a Biologically Inspired Micro-UAV by Wind Tunnel Testing. In Proceedings of the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019; p. 3581. [Google Scholar]
- Bardera, R.; Rodríguez-Sevillano, Á.; García-Magariño, A. Aerodynamic Investigation of a Morphing Wing for Micro Air Vehicle by Means of PIV. Fluids 2020, 5, 191. [Google Scholar] [CrossRef]
- Jiakun, H.; Zhe, H.; Fangbao, T.; Gang, C. Review on bio-inspired flight systems and bionic aerodynamics. Chin. J. Aeronaut. 2021, 34, 170–186. [Google Scholar]
- Hassanalian, M.; Throneberry, G.; Abdelkefi, A. Investigation on the planform and kinematic optimization of bio-inspired nano air vehicles for hovering applications. Meccanica 2018, 53, 2273–2286. [Google Scholar] [CrossRef]
- Ananda, G.K.; Selig, M.S. Design of bird-like airfoils. In Proceedings of the 2018 AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 8–12 January 2018; p. 0310. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0 V | 2 V | 2.8 V | 4 V | 5 V | |
|---|---|---|---|---|---|
| Mean relative error | 0.076% | 1.167% | 1.419% | 0.576% | 0.164% |
| Mean absolute error | 1.625 × 10 | 1.897 × 10 | 3.069 × 10 | 1.862 × 10 | 5.386 × 10 |
| Visualization | Generate .stp File | Generate .stl File | |
|---|---|---|---|
| Execution Time | 0.5 s | 0.6 s | 20 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodríguez-Sevillano, Á.A.; Casati-Calzada, M.J.; Bardera-Mora, R.; Nieto-Centenero, J.; Matías-García, J.C.; Barroso-Barderas, E. Rapid Parametric CAx Tools for Modelling Morphing Wings of Micro Air Vehicles (MAVs). Aerospace 2023, 10, 467. https://doi.org/10.3390/aerospace10050467
Rodríguez-Sevillano ÁA, Casati-Calzada MJ, Bardera-Mora R, Nieto-Centenero J, Matías-García JC, Barroso-Barderas E. Rapid Parametric CAx Tools for Modelling Morphing Wings of Micro Air Vehicles (MAVs). Aerospace. 2023; 10(5):467. https://doi.org/10.3390/aerospace10050467
Chicago/Turabian StyleRodríguez-Sevillano, Ángel Antonio, María Jesús Casati-Calzada, Rafael Bardera-Mora, Javier Nieto-Centenero, Juan Carlos Matías-García, and Estela Barroso-Barderas. 2023. "Rapid Parametric CAx Tools for Modelling Morphing Wings of Micro Air Vehicles (MAVs)" Aerospace 10, no. 5: 467. https://doi.org/10.3390/aerospace10050467
APA StyleRodríguez-Sevillano, Á. A., Casati-Calzada, M. J., Bardera-Mora, R., Nieto-Centenero, J., Matías-García, J. C., & Barroso-Barderas, E. (2023). Rapid Parametric CAx Tools for Modelling Morphing Wings of Micro Air Vehicles (MAVs). Aerospace, 10(5), 467. https://doi.org/10.3390/aerospace10050467