

Path Planning with Multiple UAVs Considering the Sensing Range and Improved K-Means Clustering in WSNs


Abstract
:1. Introduction
2. Related Work
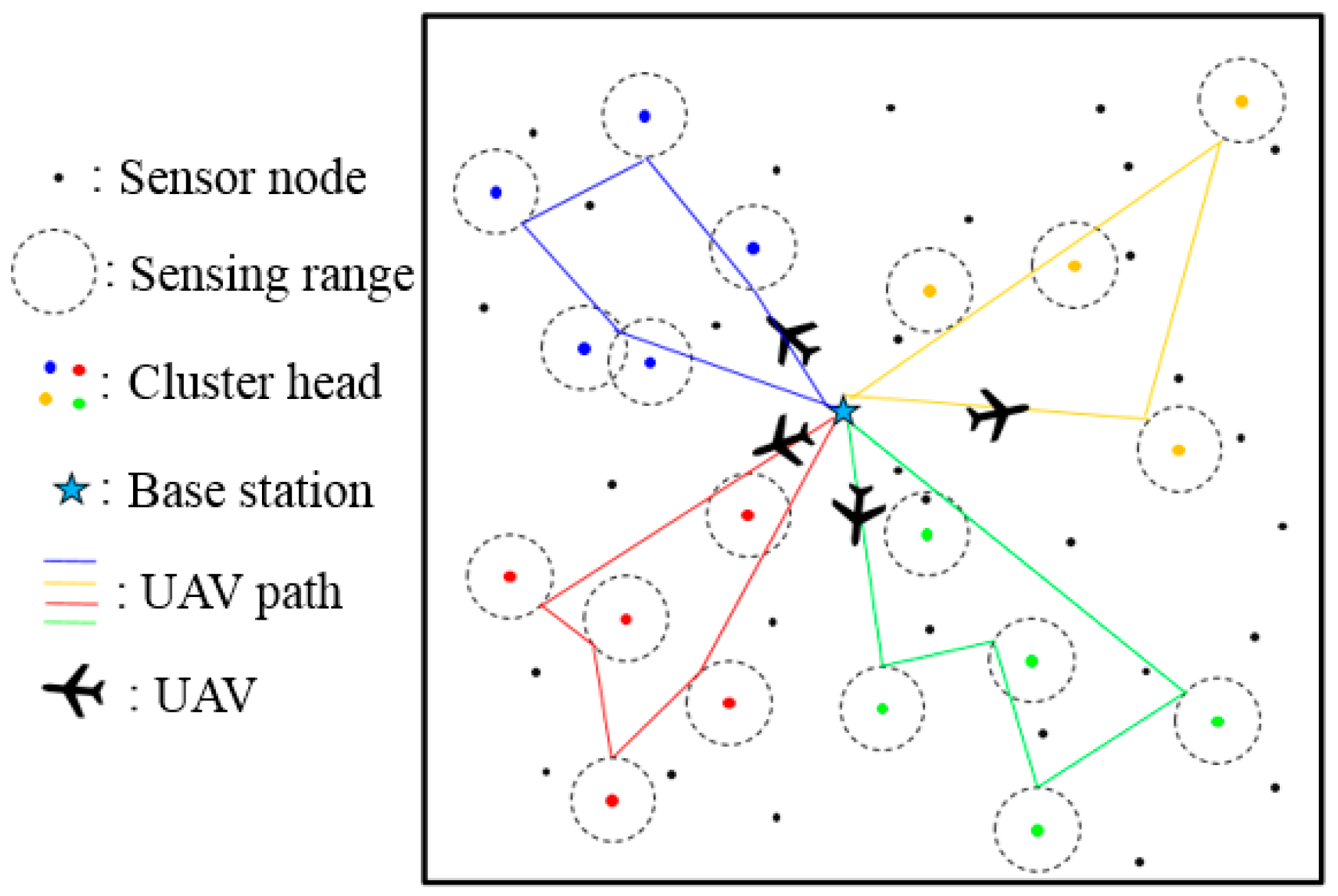
3. System Model
4. Improved K-Means Clustering Algorithm
4.1. First Clustering
| Algorithm 1. First clustering. |
| Input: (the number of clusters) Output: Location of nodes Method: nodes initial centroids for iteration Determine the location of each node for for end end Recompute the centroids end when there is no change in the centroids |
4.2. Second Clustering: CH Node Selection
| Algorithm 2. Second clustering. |
| Input: (the number of clusters) Location of each sensor node Output: Data of the CH nodes Method: CH nodes initial centroids each location Run Algorithm 1 } Select the nodes closest to final centroids as the CH nodes Update the data of the CH nodes if the lifetime of the selected CH node is exceeded Replace the CH node with the second closest node |
4.3. Third Clustering
| Algorithm 3. Third clustering. |
| Input: Output: The mission area for each UAV Method: UAVs Set k initial centroids as the final centroids of the first } for iteration Determine the location of each node for for end end Recompute the centroids end when there is no change in the centroids |
5. Path Planning and Waypoint Refinement Iteration Algorithm
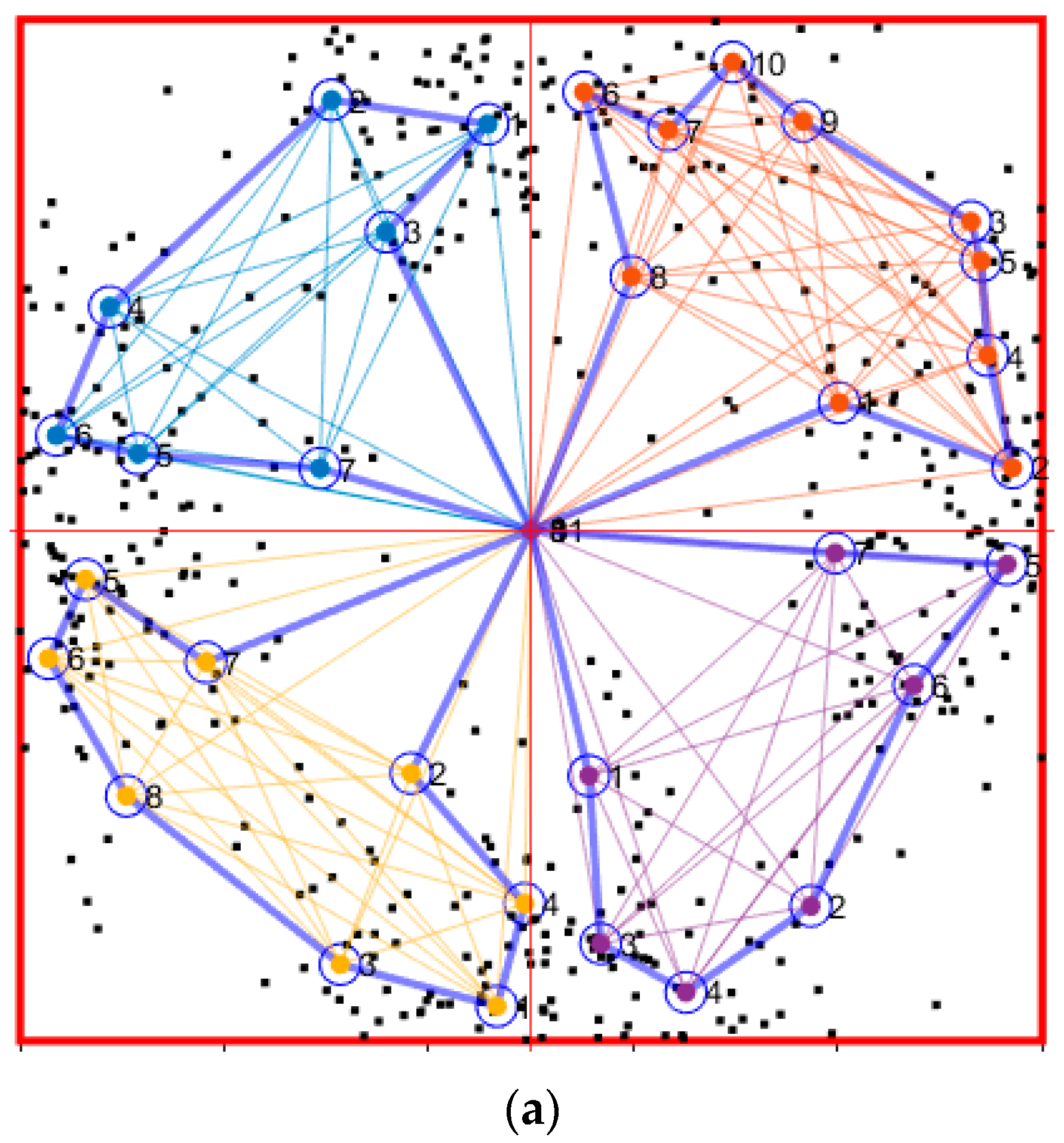
5.1. UAV Path Planning
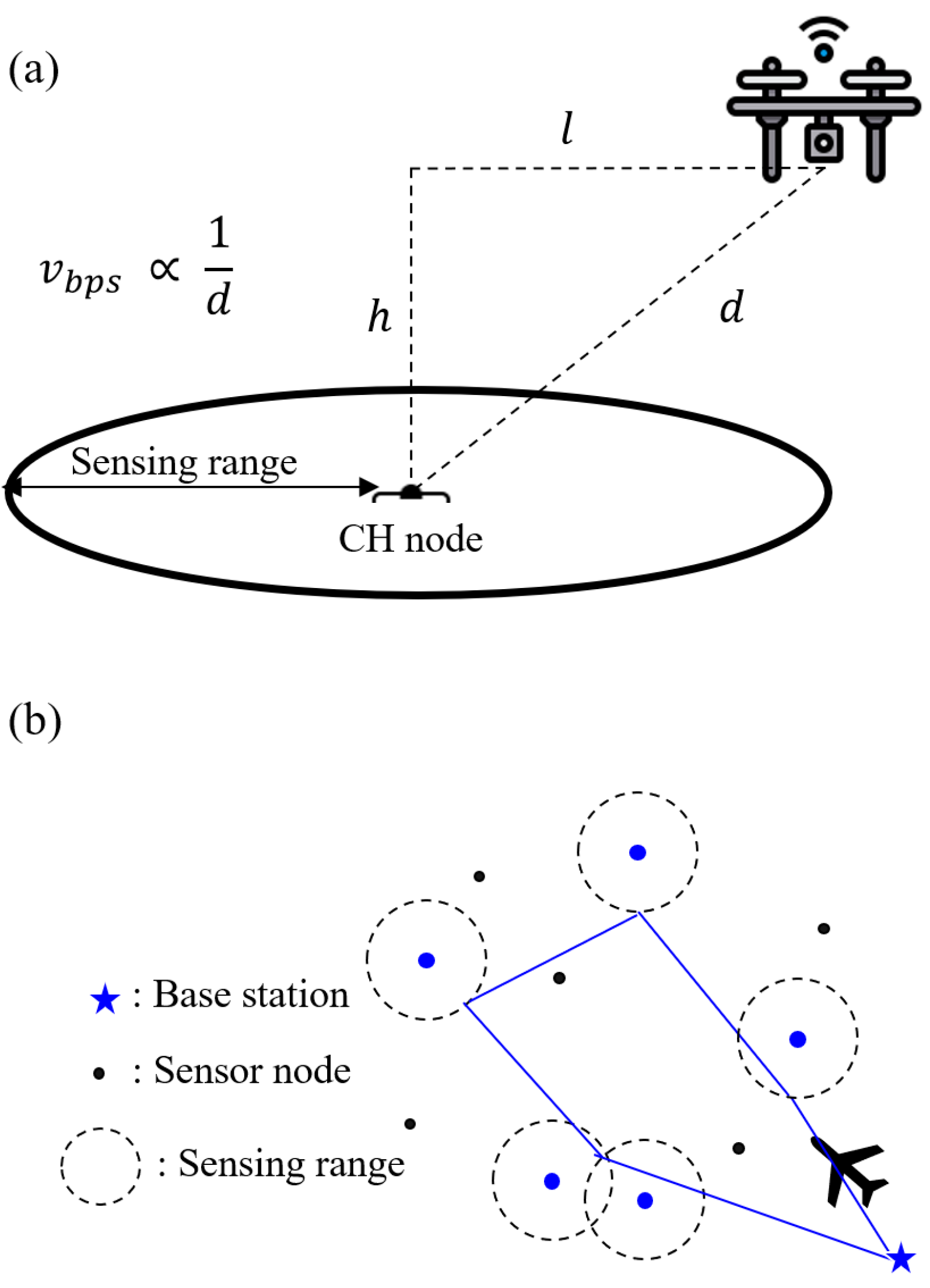
5.2. Sensing Range
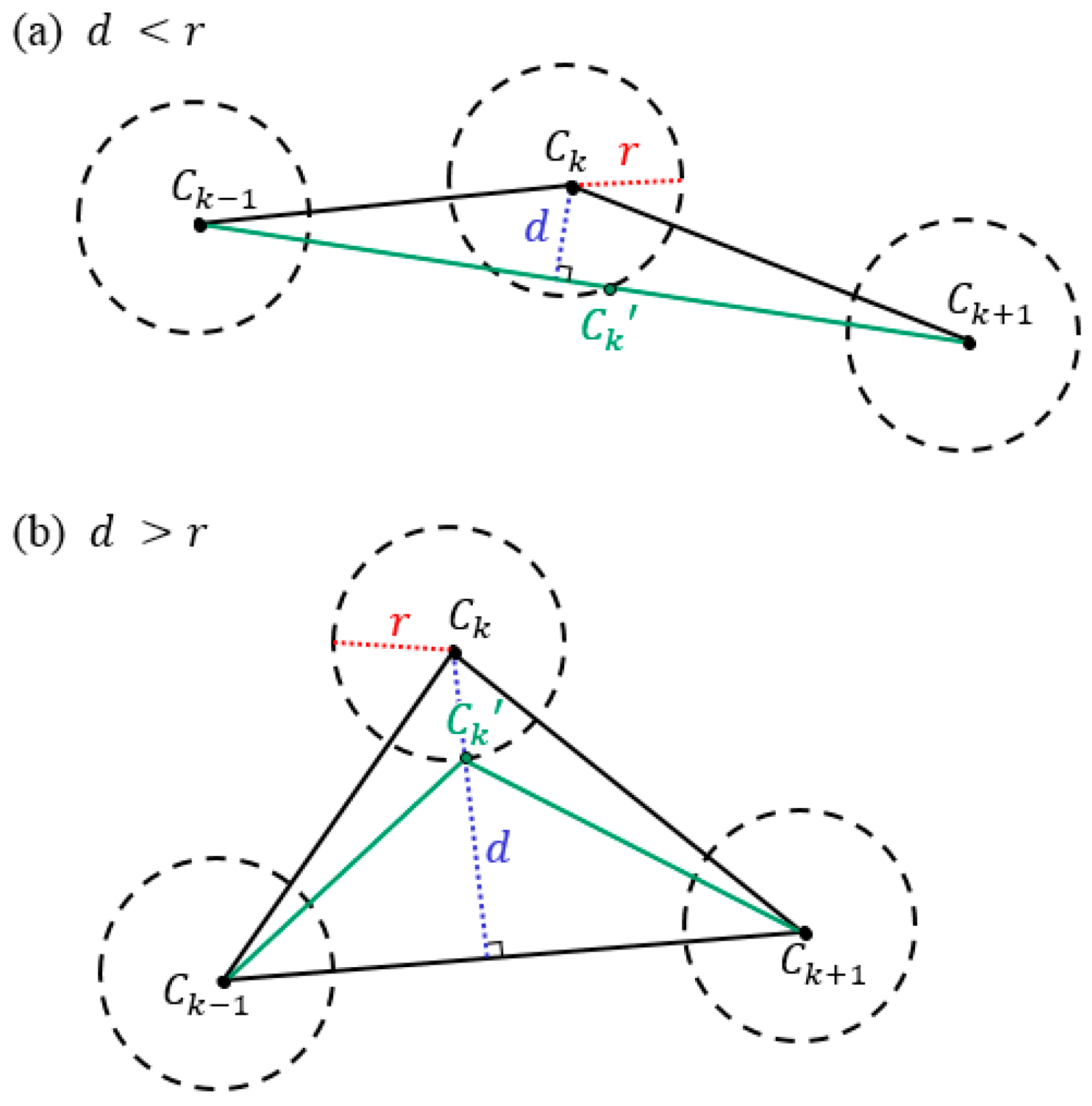
5.3. Waypoint Refinement Iteration (WRI) Algorithm
| Algorithm 4. Waypoint refinement iteration. |
| Input: Order of visiting each CH node The flight path of each UAV passing the CH nodes Output: Updated waypoint The final flight path of each UAV Method: Draw the sensing range (circle) of each CH node Decide the order of the n CH nodes that the UAV must visit = BS for for k = 2 to n − 1 = sensing range if d < r Among the points where the sensing ranges of intersect, the point closest to is set as the new waypoint otherwise Draw a line that is perpendicular to The point where the line and the sensing range intersect is set as the new waypoint end end if there is no further change |
6. Performance Analysis
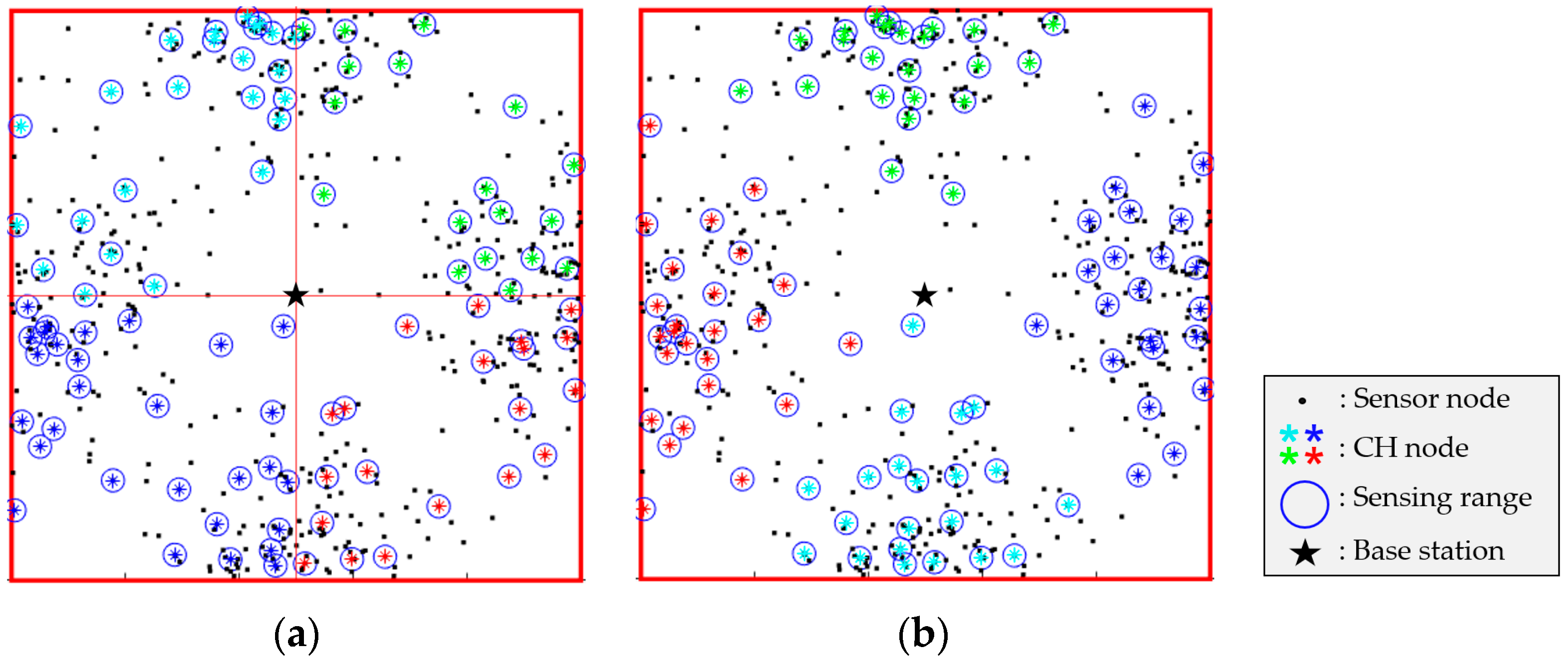
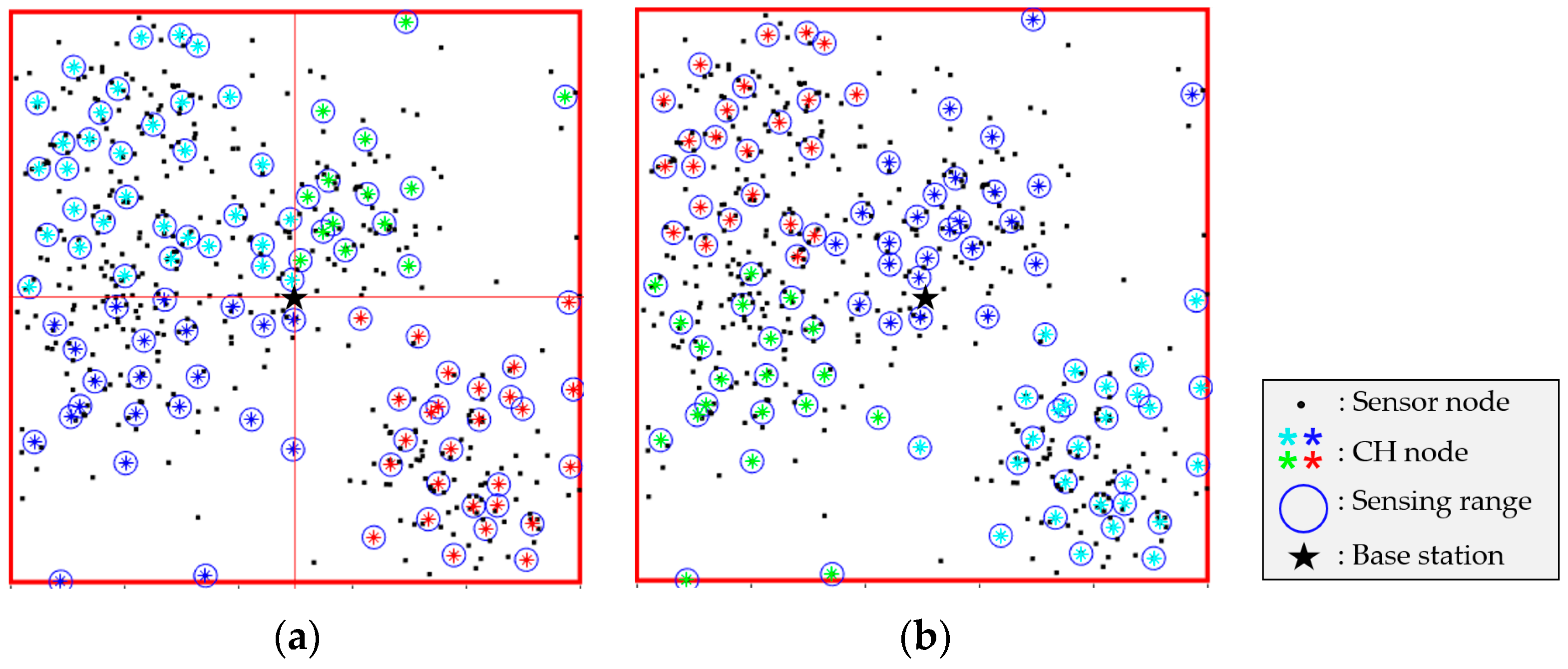
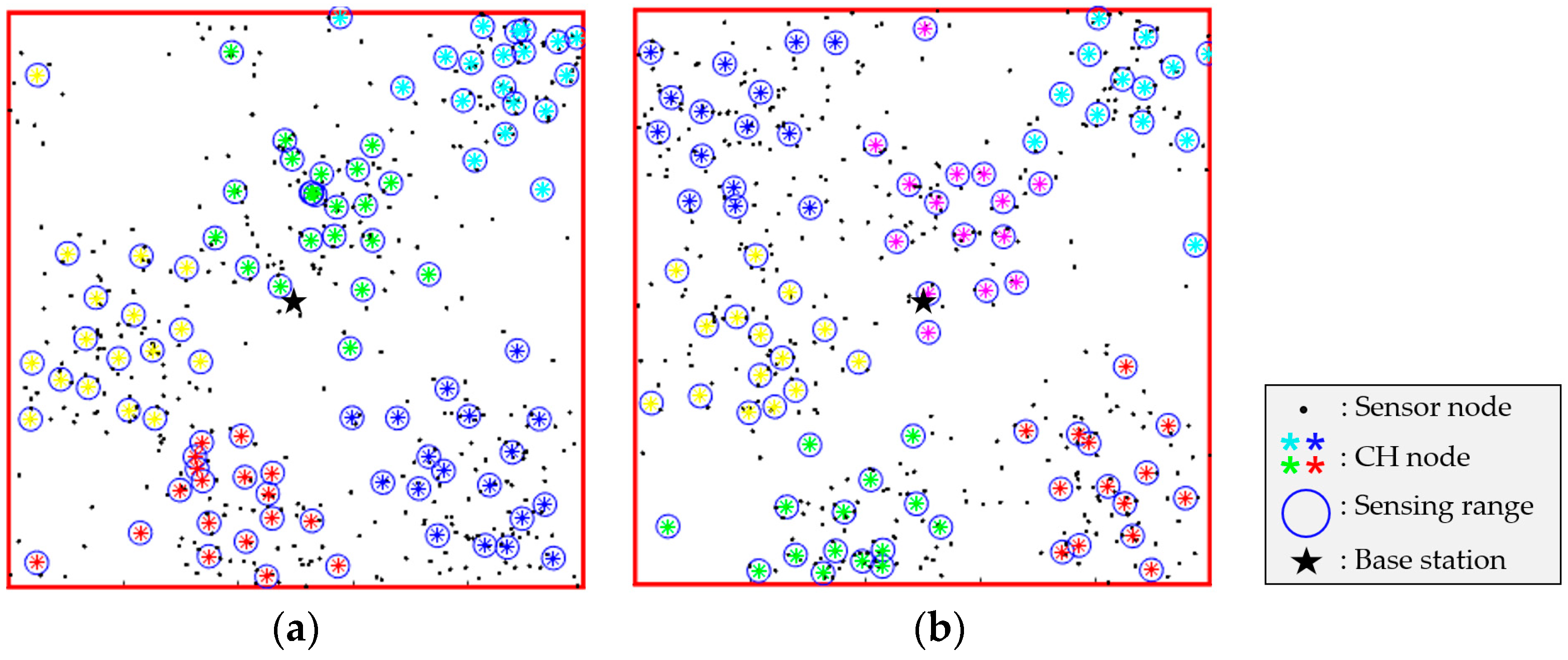
6.1. Improved K-Means Clustering Results
6.1.1. Scenario 1
6.1.2. Scenario 2
6.1.3. Number of UAVs
6.1.4. Contribution of the Improved K-Means Clustering Algorithm
6.2. Results of the Waypoint Refinement Iteration Algorithm
6.2.1. Efficiency of the UAV Flight Path
6.2.2. Consideration of the UAV Data Collection Task
6.3. Performance Analysis in Terms of the Flight Distance of All UAVs
6.4. Performance Analysis in Terms of the Sensing Range
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| Parameter | Description |
| -th node | |
| C | Set of the sensor nodes |
| Final centroids of C | |
| Distance between the UAV and the CH node | |
| Data transmission speed | |
| Task processing time of the UAV | |
| Total amount of data | |
| Distance-transmission rate inverse constant | |
| Total flight distance of the UAV | |
| Speed of the UAV |
References
- Popescu, D.; Stoican, F.; Stamatescu, G.; Ichim, L.; Dragana, C. Advanced UAV–WSN System for Intelligent Monitoring in Precision Agriculture. Sensors 2020, 20, 817. [Google Scholar] [CrossRef] [PubMed]
- Karray, F.; Jmal, M.W.; Garcia-Ortiz, A.; Abid, M.; Obeid, A.M. A Comprehensive Survey on Wireless Sensor Node Hardware Platforms. Comput. Netw. 2018, 144, 89–110. [Google Scholar] [CrossRef]
- Ebrahimi, D.; Sharafeddine, S.; Ho, P.; Assi, C. UAV-Aided Projection-Based Compressive Data Gathering in Wireless Sensor Networks. IEEE Internet Things J. 2019, 6, 1893–1905. [Google Scholar] [CrossRef]
- Monwar, M.; Semiari, O.; Saad, W. Optimized Path Planning for Inspection by Unmanned Aerial Vehicles Swarm with Energy Constraints. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–6. [Google Scholar]
- Suman, S.; Kumar, S.; De, S. UAV-Assisted RFET: A Novel Framework for Sustainable WSN. IEEE Trans. Green Commun. Netw. 2019, 3, 1117–1131. [Google Scholar] [CrossRef]
- Popescu, D.; Dragana, C.; Stoican, F.; Ichim, L.; Stamatescu, G. A Collaborative UAV-WSN Network for Monitoring Large Areas. Sensors 2018, 18, 4202. [Google Scholar] [CrossRef] [PubMed]
- Modares, J.; Ghanei, F.; Mastronarde, N.; Dantu, K. UB-ANC Planner: Energy Efficient Coverage Path Planning with Multiple Drones. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 6182–6189. [Google Scholar]
- Cabreira, T.; Brisolara, L.; Ferreira, P.R., Jr. Survey on Coverage Path Planning with Unmanned Aerial Vehicles. Drones 2019, 3, 4. [Google Scholar] [CrossRef]
- Chang, W.L.; Zeng, D.; Chen, R.C.; Guo, S. An Artificial Bee Colony Algorithm for Data Collection Path Planning in Sparse Wireless Sensor Networks. Int. J. Mach. Learn. Cybern. 2015, 6, 375–383. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. Wireless Sensor Networks: A Survey. Comput. Netw. 2002, 38, 393–422. [Google Scholar] [CrossRef]
- Thammawichai, M.; Baliyarasimhuni, S.P.; Kerrigan, E.C.; Sousa, J.B. Optimizing Communication and Computation for Multi-UAV Information Gathering Applications. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 601–615. [Google Scholar] [CrossRef]
- Chawra, V.K.; Gupta, G.P. Multiple UAV Path-Planning for Data Collection in Cluster-based Wireless Sensor Network. In Proceedings of the 2020 First International Conference on Power, Control and Computing Technologies (ICPC2T), Raipur, India, 3–5 January 2020; pp. 194–198. [Google Scholar]
- Sun, Y.; Chen, J.; Du, C.; Gu, Q. Path Planning of UAVs Based on Improved Clustering Algorithm and Ant Colony System Algorithm. In Proceedings of the 2020 IEEE 5th Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 12–14 June 2020; pp. 1097–1101. [Google Scholar]
- Baek, J.; Han, S.I.; Han, Y. Energy-Efficient UAV Routing for Wireless Sensor Networks. IEEE Trans. Veh. Technol. 2020, 69, 1741–1750. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| x length | 1000 m |
| y length | 1000 m |
| Sensing range | 20 m |
| Number of sensor nodes | 500 |
| Number of CH nodes | 100 |
| Number of UAVs | 4 |
| Cyan CH Nodes | Green CH Nodes | Blue CH Nodes | Red CH Nodes | Average | |
|---|---|---|---|---|---|
| with the proposed algorithm | 145.98 m | 147.45 m | 149.08 m | 158.21 m | 150.18 m |
| with the previous algorithm [12] | 211.80 m | 218.53 m | 201.87 m | 186. 10 m | 204.57 m |
| Cyan CH Nodes | Green CH Nodes | Blue CH Nodes | Red CH Nodes | Average | |
|---|---|---|---|---|---|
| with the proposed algorithm | 148.59 m | 135.02 m | 138.48 m | 123.74 m | 136.46 m |
| with the previous algorithm [12] | 169.96 m | 134.79 m | 142.51 m | 144.30 m | 147.89 m |
| Parameter | Value |
|---|---|
| x length | 75 m |
| y length | 75 m |
| Sensing range | 10 m |
| Number of CH nodes | 7 |
| Number of UAVs | 1 |
| Parameter | Value |
|---|---|
| Number of CH nodes | 32 |
| UAV speed | 10 m/s |
| Sensor node capacity | 1 MB |
| Transmission speed | 2~40 Mbps |
| 10 m | |
| k | 20 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.; Park, J. Path Planning with Multiple UAVs Considering the Sensing Range and Improved K-Means Clustering in WSNs. Aerospace 2023, 10, 939. https://doi.org/10.3390/aerospace10110939
Kim S, Park J. Path Planning with Multiple UAVs Considering the Sensing Range and Improved K-Means Clustering in WSNs. Aerospace. 2023; 10(11):939. https://doi.org/10.3390/aerospace10110939
Chicago/Turabian StyleKim, Sejeong, and Jongho Park. 2023. "Path Planning with Multiple UAVs Considering the Sensing Range and Improved K-Means Clustering in WSNs" Aerospace 10, no. 11: 939. https://doi.org/10.3390/aerospace10110939
APA StyleKim, S., & Park, J. (2023). Path Planning with Multiple UAVs Considering the Sensing Range and Improved K-Means Clustering in WSNs. Aerospace, 10(11), 939. https://doi.org/10.3390/aerospace10110939