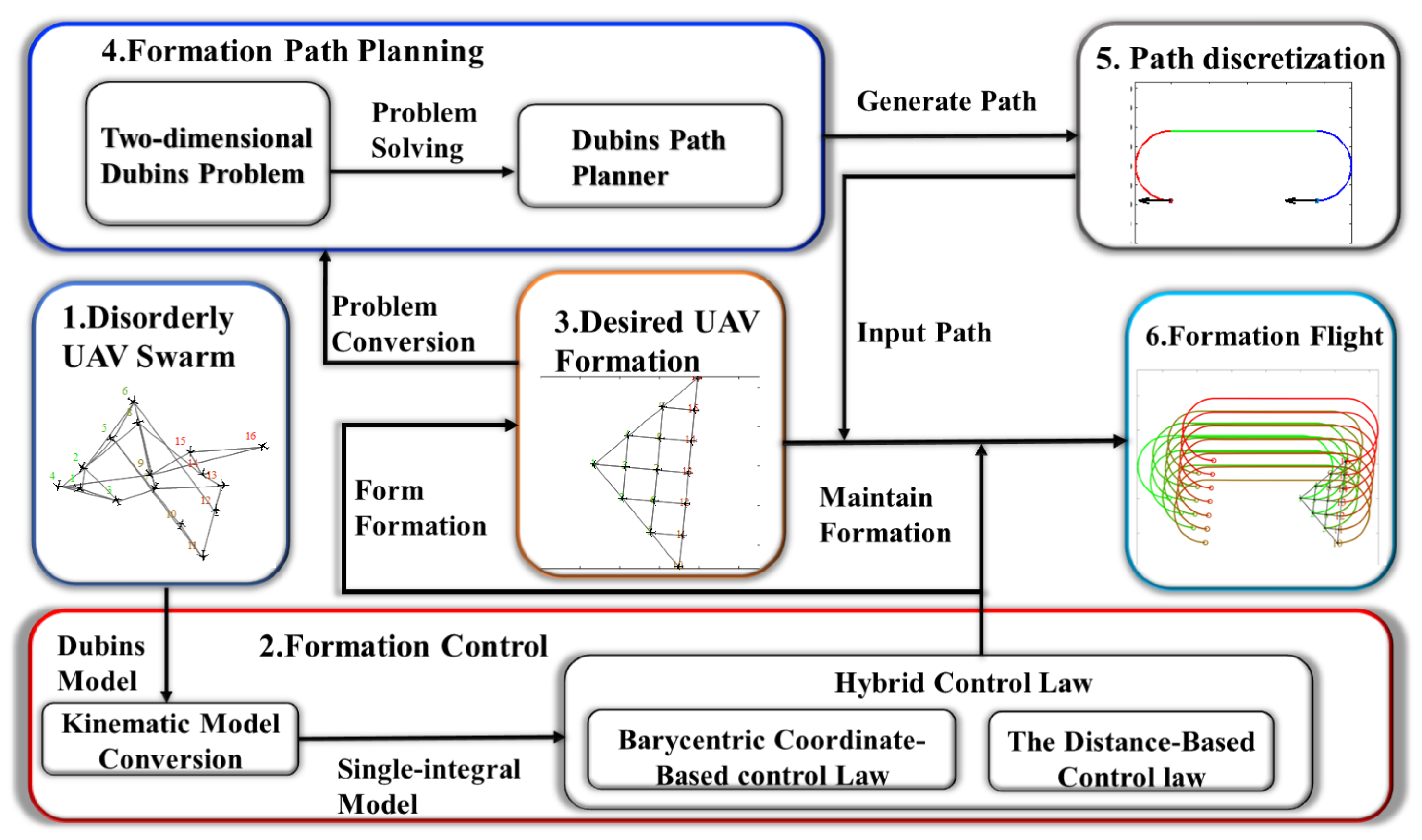
The solution to the formation path planning problem is twofold: formation control and path planning. The former employs hybrid formation control laws to control the chaotic UAV swarm into a desired formation, allowing it to behave as a single rigid body. For the latter, we utilize the Dubins path generation method based on analytical geometry to swiftly devise an optimal feasible path. Furthermore, we discuss the problem of obstacle avoidance under a special condition and propose specific strategies.
4.1. Distributed Control Law
By introducing formation control, the complex problem of formation path planning is transformed into a single UAV path planning problem. Therefore, we shall initially discuss the formation control methods. It is evident that the linear velocity and angular velocity in (
4) serve as control parameters. During the formation control stage, the fixed-wing UAV is required to complete two tasks: forming the desired formation and moving towards the starting point of formation path flight along the specified direction. Hence, the control parameters should also incorporate two components: formation control and expected speed,
where
denotes the unit velocity vector,
denotes the desired velocity, and
is the hybrid control law as follow:
Note that both and are given relative to the local coordinate system of the agent and need to be transformed to be projected onto the UAV heading direction and its vertical vector .
The linear term
is a control law based on barycentric coordinates, which can ensure that UAVs almost globally converge to the desired formation shape. Here,
represents the set of neighbors of agent
i, and
is the constant control gain matrix to be given, in the form of
It should be noted that the main diagonal elements of
remain identical, but the signs of the subdiagonal elements are opposite. By restricting the gain matrix to this form, the expression of the closed-loop dynamics in global or local coordinate system is guaranteed to be invariant [
13]. This not only enables the agent to use the relative positions of neighbors measured in the local coordinate system, but also design and analyze control strategies in the global coordinate system.
Although the control law based on barycentric coordinates guarantees that the UAVs converge to the desired formation shape under almost all initial conditions, it is unable to control the formation scale. Consequently, to determine the final formation scale, it is expanded with the distance-based control law
, where
denotes the distance between agent
i and
j, while
denotes their expected distance.
f is a bounded smooth map and chosen such that for all
,
for
, and
. This article selects
where
is an arbitrary constant, which can be chosen to have a desired
. The augmentation term
, a distance-based control law, influences agent
i to move towards its neighbor
j when the distance
between agents
i and
j exceeds the desired distance
, and vice versa. This mechanism guarantees collision avoidance among the UAVs within the formation during flight.
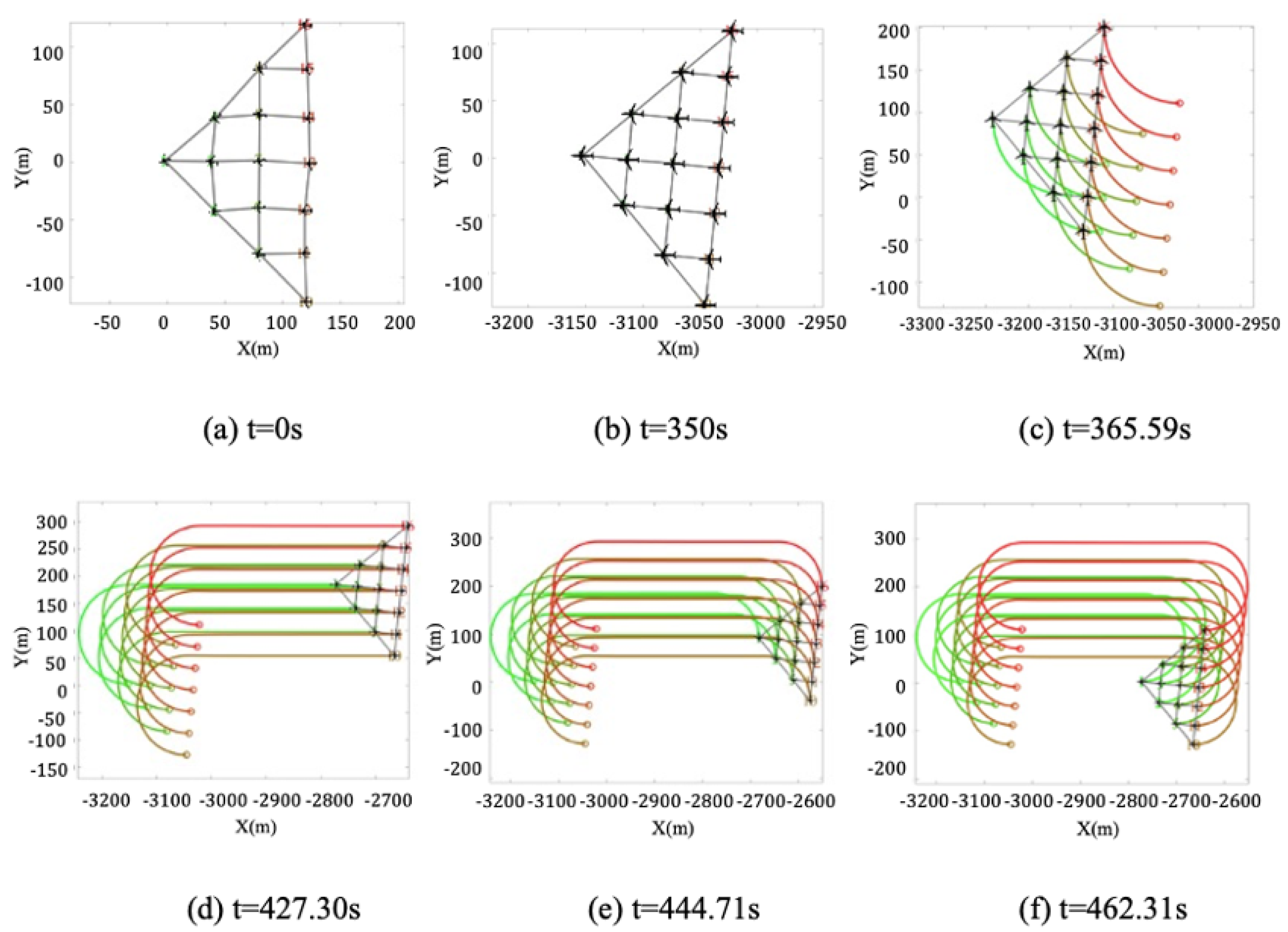
In the initial phase of the formation control, the linear item predominates, and the fixed-wing UAVs first move quickly to the desired formation shape. As the UAVs near the formation shape, the augmentation term becomes dominant, and the formation will slowly expand or contract to achieve the desired scale.
4.2. The Closed-Loop Dynamics
By substituting (
5) and (
6) into (
4), the closed-loop dynamics of UAVs can be collectively expressed as:
where
denotes the aggregate state vector,
denotes the velocity direction vector of the UAV, which is a constant vector, and
denotes the aggregate heading vector. Matrices
and
are defined as
Distance control matrix
is defined as
with
Diagonal block elements,
where
is a unit matrix.
denotes the aggregate gain matrix to be solved and is similar to the Laplacian matrix in graph theory. The specific form of matrix
is as follows
Note that, if
,
in (
13) is zero. The
diagonal blocks on the main diagonal are the negative sum of the rest of blocks on the same row. From the block Laplace structure of
A, where
and
are in the kernel of
, there holds
Meanwhile, as the desired formation vector
and its
rotation vector
should be the equilibrium of (
9), there holds
When the gain matrix
is designed such that except for the four zero eigenvalues related to the above eigenvectors, the remaining eigenvalues possess negative real roots, then Theorem 2 of [
13] is satisfied. Under these conditions, starting from any initial conditions, the UAVs will converge to the desired formation with global stability. Gain matrices satisfying these conditions are attainable through the semidefinite program (SDP) outlined in [
14].
Upon determining the closed-loop dynamics of the UAV swarm, it is possible to demonstrate that, under the control of the control law (
5), the UAV swarm converges to the desired formation and move with desired speed along direction
. Let
be the coordinates of UAVs in an arbitrary embedding of the desired formation; then,
applies. Consider a desired relative balance, that is, the UAV swarm moves in a desired formation along the desired direction, and its mathematical expression is
This can be verified by replacing (
16) into (
9). Because
has a block Laplace structure, and
is a constant vector with all components equal, then
. Constructing vector
and substituting into (
9), noting that
and
, then there is
Consider the Lyapunov function candidate:
Since
is a constant vector and
, the derivative of
along the trajectories of (
17) is
Substituting the two equations in (
17) into the above equation, after simplification, we can obtain
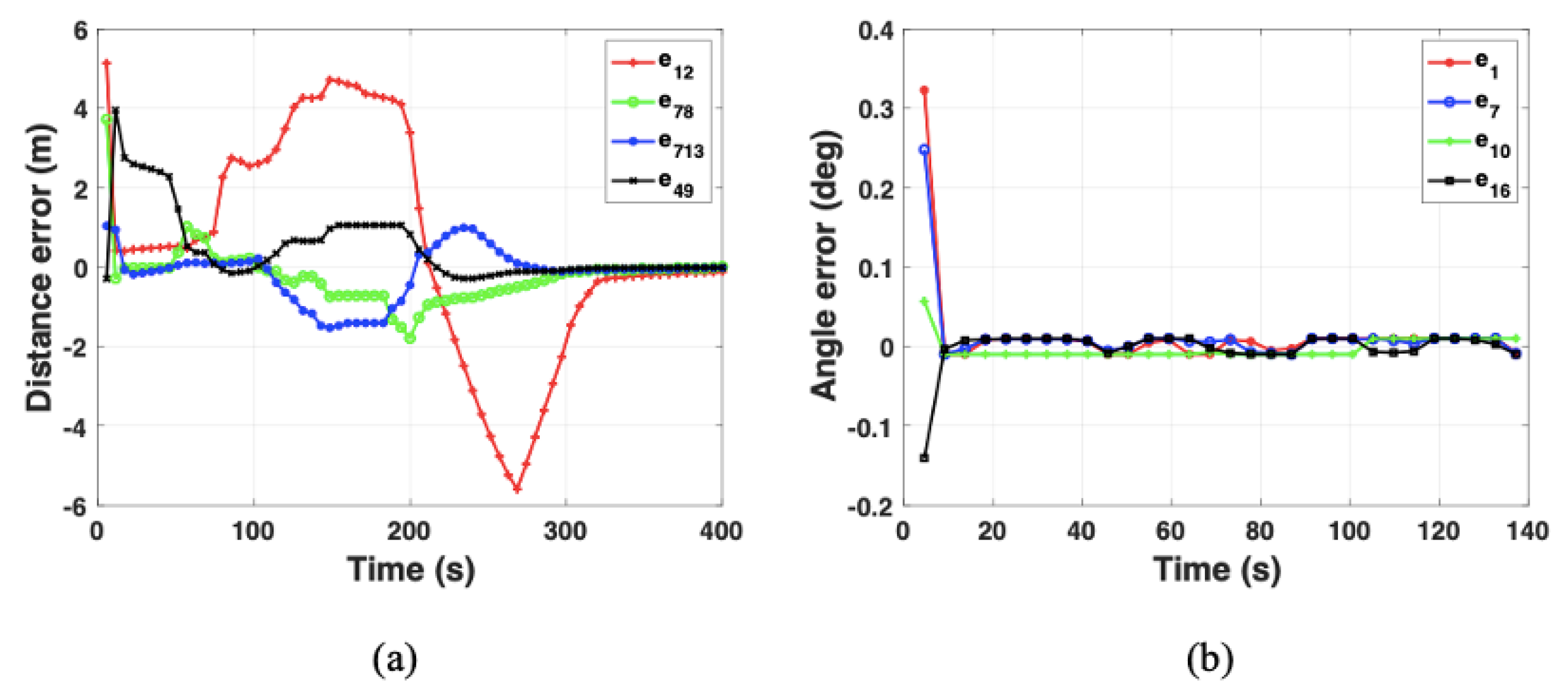
This means the system is stable. When
, there are
and
, where
means
for any UAV. Because the formula (
16) excludes the possibility of
, then there is
, that is, all UAVs are flying along the desired direction. This indicates that the direction of the UAV swarm is converging.
means that
is the desired formation mode, that is,
is satisfied, and the distance between UAVs also meets the requirements when the UAV swarm forms the required formation shape.
Considering the physical constraints (
2) of UAV, the speed and angular velocity of the fixed-wing UAV need to be limited, and the following related saturation control needs to be defined:
where
,
,
are:
where
.
4.3. The 2D Dubins Problem and Dubins Path Generation
The control law (
5) of the fixed-wing UAV indicates that the UAV moves according to the planned path by controlling the UAV’s motion direction and path length. Therefore, path planning entails specifying the direction and length of the path.
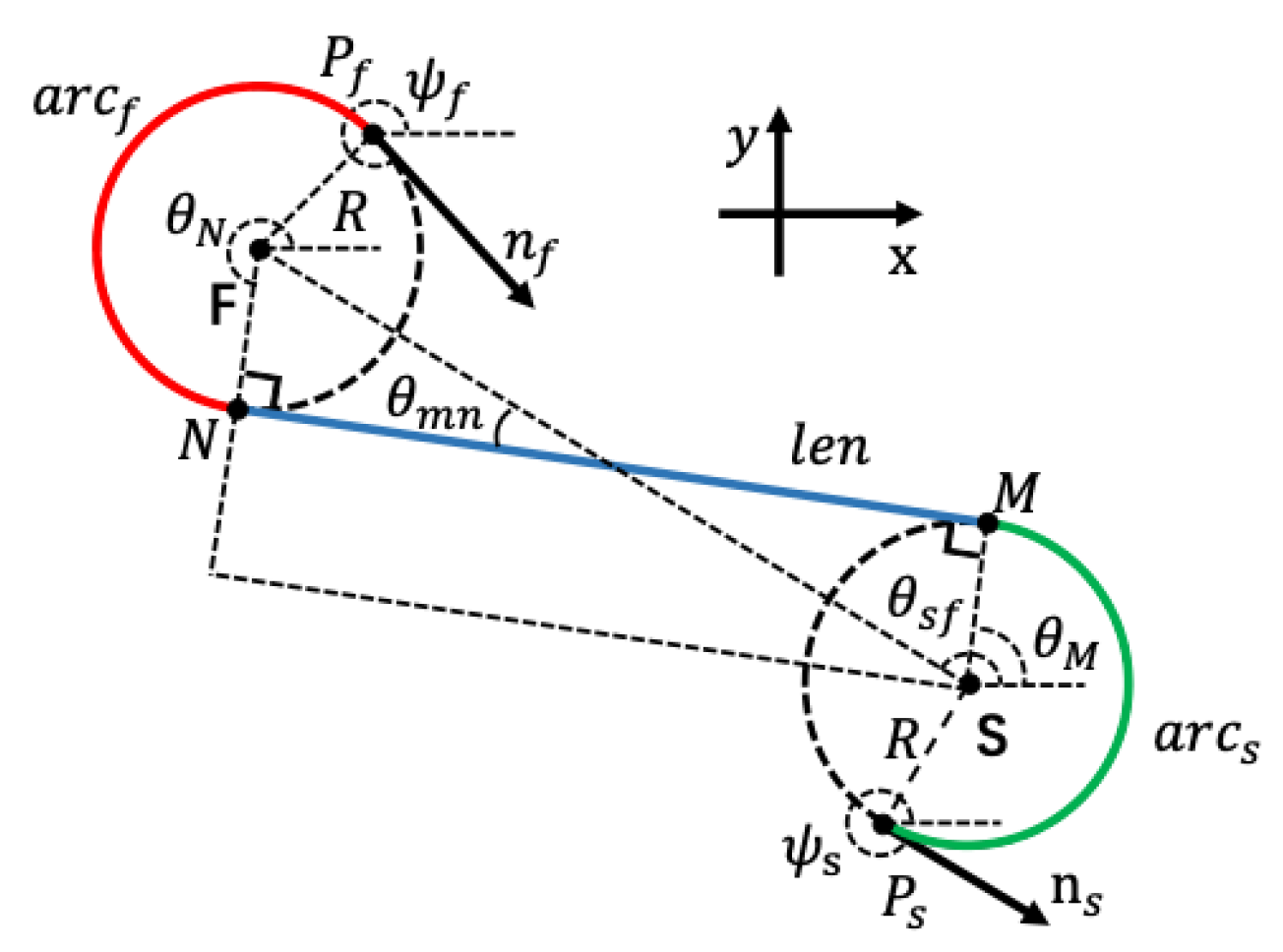
The path planning between two orientation points in the same altitude plane of single fixed-wing UAV can be simplified as a two-dimensional Dubins problem. Consider the 2D geometry of the Dubins path planning problem, as depicted in
Figure 4. In this paper, we denote by
the state of the aircraft at a certain moment. For example,
denotes the initial state of the aircraft, and
denotes the final state of the aircraft. During flight, the UAV speed is commonly assumed to be a constant value, leading to the normalization of the aircraft model (
1) for simplified calculations. The objective function for obtaining the shortest path is defined as the flight time
of the UAV. The time optimal control problem is obtained by combining the normalized model of UAV,
where
u is the control parameter. For fixed-wing UAV, it realizes constant-altitude turns through coordinated turns, then there holds
where
g is the gravitational acceleration,
V is the constant speed and
is the roll angle of the UAV. Since there are physical constraints on the roll angle of the aircraft, there are corresponding restrictions on the control parameter
. Note that
k represents the maximum curvature when the UAV moves in a circular path. Due to velocity normalization of the model in (
24), the total movement time equates to the total path length.
The 2D Dubins optimal control problem has been extensively studied. L.E. Dubins was the first to demonstrate using geometric methods: Any solution to the problem (PD), i.e., any
and piecewise
shortest path of bounded curvature in the plane between two specified endpoints, where the slope of the path is also specified, is of type CSC or CCC, or its subset. Moreover, if the shortest path is of type CCC, the length of the second arc is greater than
[
23]. Here, C denotes curved segment and S denotes straight segment. The theorem illustrates that the optimal path must belong to the CSC or CCC type, or a degenerate form of these paths. However, fixed-wing UAV possesses a large range of maneuverability in flight, and the distance between the starting point and the ending point is often more than 4 times the minimum radius of curvature. Reference [
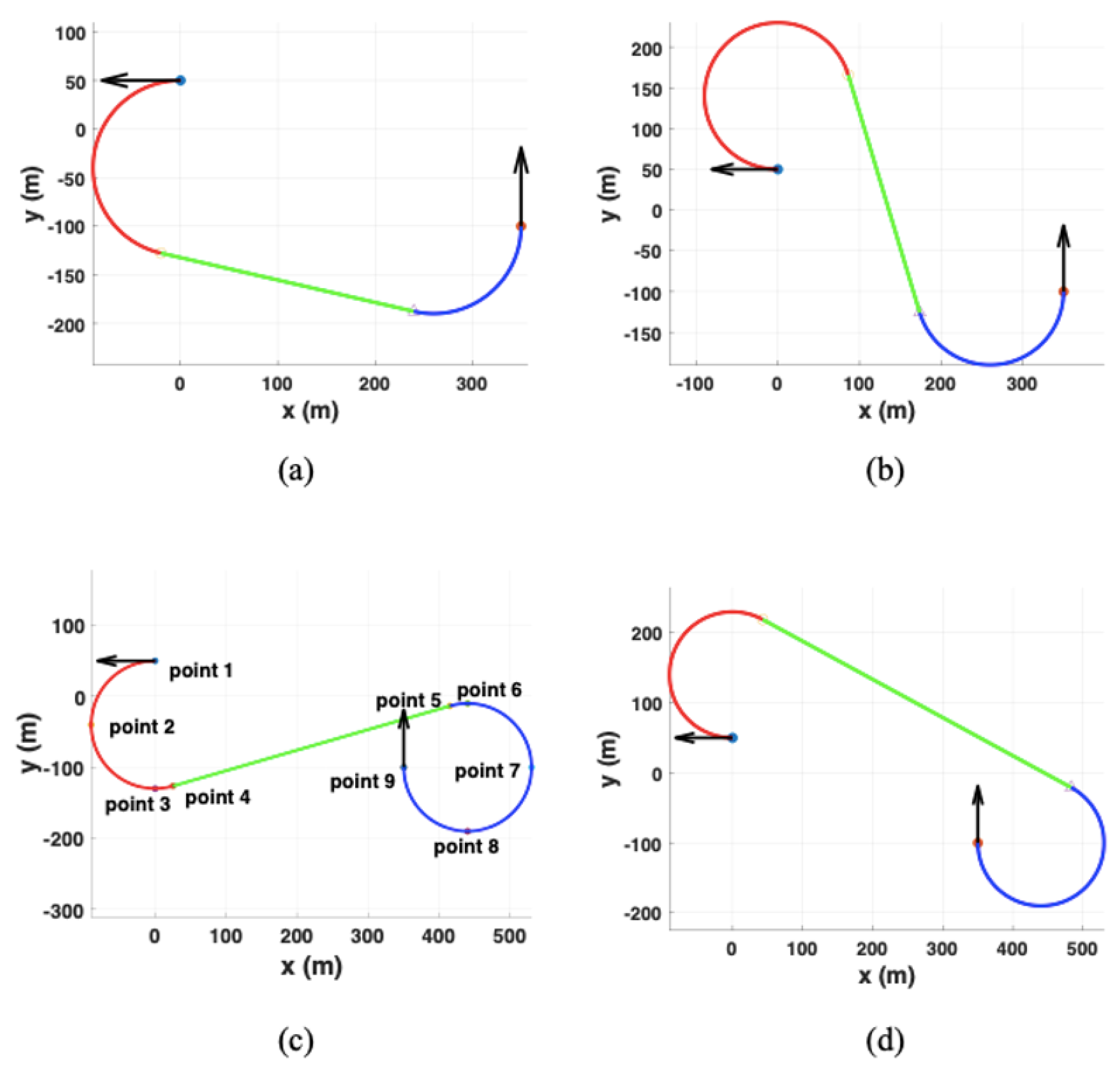
22] has proved that the solution type of Dubins problem in this scenario is CSC. Thus, it is possible to solve the optimal control problem without resorting to inefficient optimal control methods. Instead, the optimal path is obtained by considering only four CSC type paths (LSR, LSL, RSR, RSL). The shortest path is the optimal path. To facilitate real-time path generation, this paper proposes a millisecond-level Dubins path planning method based on analytic geometry. The path generation method is delineated in detail below.
The CSC path consists of three segments: the starting arc , the middle tangent segment , and the ending arc . Four key points exist on the path: the starting point , the tangent point M on the starting arc, the tangent point N on the ending arc, and the ending point . By identifying these key points, a CSC-type path can be established. Before constructing the path, the 2D Dubins path planning problem is analyzed to gather the necessary known information. These information include the starting point , the ending point , the turning direction of the starting circle and the ending circle, that is, the left or right turn, and the minimum turning radius R.
First, to obtain the LSR path shown in
Figure 5, it is essential to use the turning directions of the starting arc and the ending arc to determine the center
S of the starting circle and the center
F of the ending circle. This guarantees start arc and end arc position determination. Their coordinates are calculated by
where, when the UAV turns left, the angle is
; otherwise, the angle is
.
Then, the coordinates of the tangent points
M and
N are calculated. According to the coordinates of the centers of the two turning circles, the length of the line
connecting the centers of the two circles is obtained by
Meanwhile, the angle
between the line
and the X axis is derived by
From the length of the line segment
and the radius of the two circles, the angle
between the line
and the tangent line
is also gained. When the path type is RSL and LSR,
is calculated by
When the path type is RSR and LSL,
is obtained from
The position of the tangent point
M on the starting circle is determined by the angle
between the line segment
and the X axis. And
is attained through the geometric relationship with the angle
and the angle
, as shown in the
Table 1. Similarly, the position of the tangent point
N on the termination circle can also be determined. The coordinates of the two tangent points are calculated by
Furthermore, the lengths of the starting arc
and the ending arc
are calculated by
which require the angles
and
. The angle
is derived through its geometric relationship with the angle
and the attitude of starting point
, as shown in
Table 2. Similarly, the angle
of the ending arc
is gained through the angle
and the attitude of the ending point
. Additionally, the length of the middle tangent segment
is calculated from the coordinates of the tangent points
M and
NFinally, the path can be discretized using an appropriate number of points to visualize the path. The coordinates of each discrete point are determined by the interpolation method. Equations (
36) and (
37), respectively, represent the points on the starting arc and the ending arc whose angular increments are
and
. Equation (
38) depicts the points on the tangent segment MN, where the length increment is
, and
represents the unit direction vector of the tangent segment. By analyzing the two endpoints, M and N, of the tangent segment, we can determine the unit direction vector (
39) for the tangent. The desired path is obtained by connecting the discrete points. The pseudocode for generating the optimal Dubins path is presented in Algorithm 1.
| Algorithm 1: CSC-type Dubins path generation |
| Input: ,, |
| Output: ,, |
- 1:
for i = 1:4 do - 2:
choose , - 3:
calculate and - 4:
determine the tangent points and - 5:
obtain the length of , , - 6:
the optimal path ← minimum length
|
4.4. Obstacle Avoidance Strategy in Special Situations
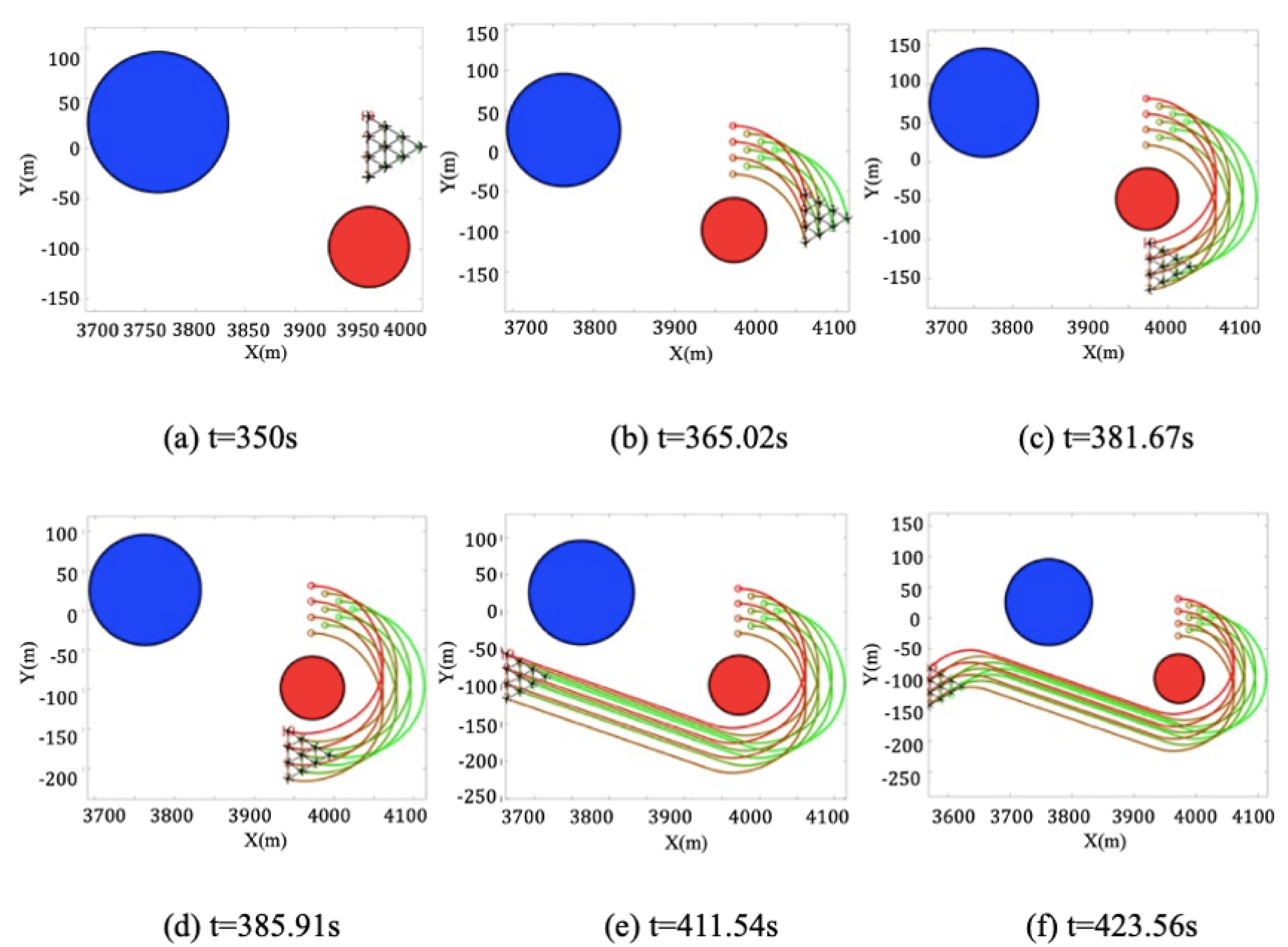
During flight, a UAV swarm frequently encounters no-fly zones, including mountain peaks or areas covered by air defense radar. Consequently, obstacle avoidance becomes an important part of formation flight. The proposed computationally lightweight path generation method offers significant potential in formation obstacle avoidance, as it utilizes the simplified Dubins model suitable for fixed-wing UAVs. A simple example of two-dimensional circular obstacle avoidance is provided for illustration. In this instance, a specific scenario is considered where the planned path not only avoids obstacles for a single UAV, but also for the entire UAV swarm.
The obstacle avoidance problem is also two-dimensional, and the problem scenario is illustrated in
Figure 6. It is assumed that the two known static obstacles
and
are of a circular shape. The location of the centers
and
are
and
, respectively, and their radii are
and
respectively
. A UAV with a specific heading starts from the starting point
A, avoids two obstacles, and safely reaches the desired target
B with another specific heading. The dotted line
in
Figure 6 indicates the path taken by the UAV towards the desired destination point.
The obstacle avoidance path planning method initially assumes an obstacle-free environment and utilizes the previously proposed fast path planning method to generate possible paths from the starting point to the end point. Afterwards, the planned paths need to be assessed for potential intersections with known obstacles. The Dubins path consists of three segments: the initial arc, the middle tangent segment, and the final arc. Therefore, each of the three segments needs to be independently checked against every obstacle to determine if there are any intersections. Whether the starting arc intersects with the obstacle can be determined based on the positional relationship between the starting circle and obstacle circle. Similarly, it can be determined whether the final arc intersects with the obstacle. Whether the middle tangent segment intersects with the obstacle can be determined by the positional relationship between the circle and the straight line. The dotted line
in
Figure 6 indicates that the planned path intersects with an obstacle.
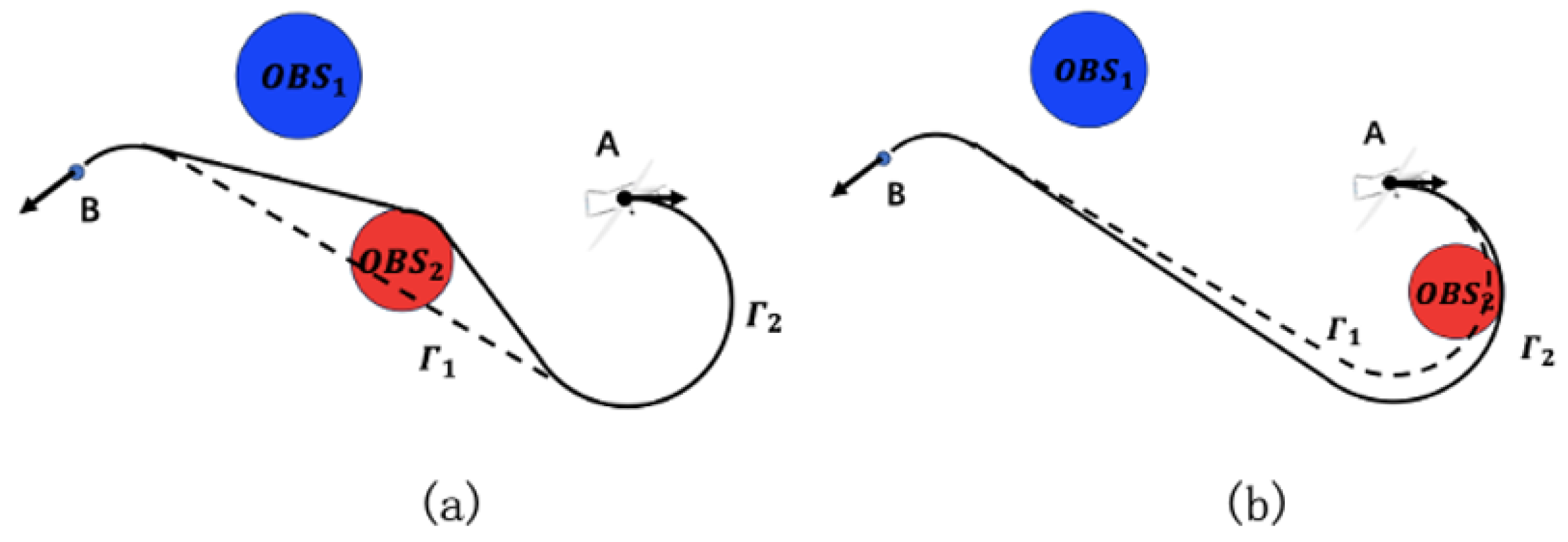
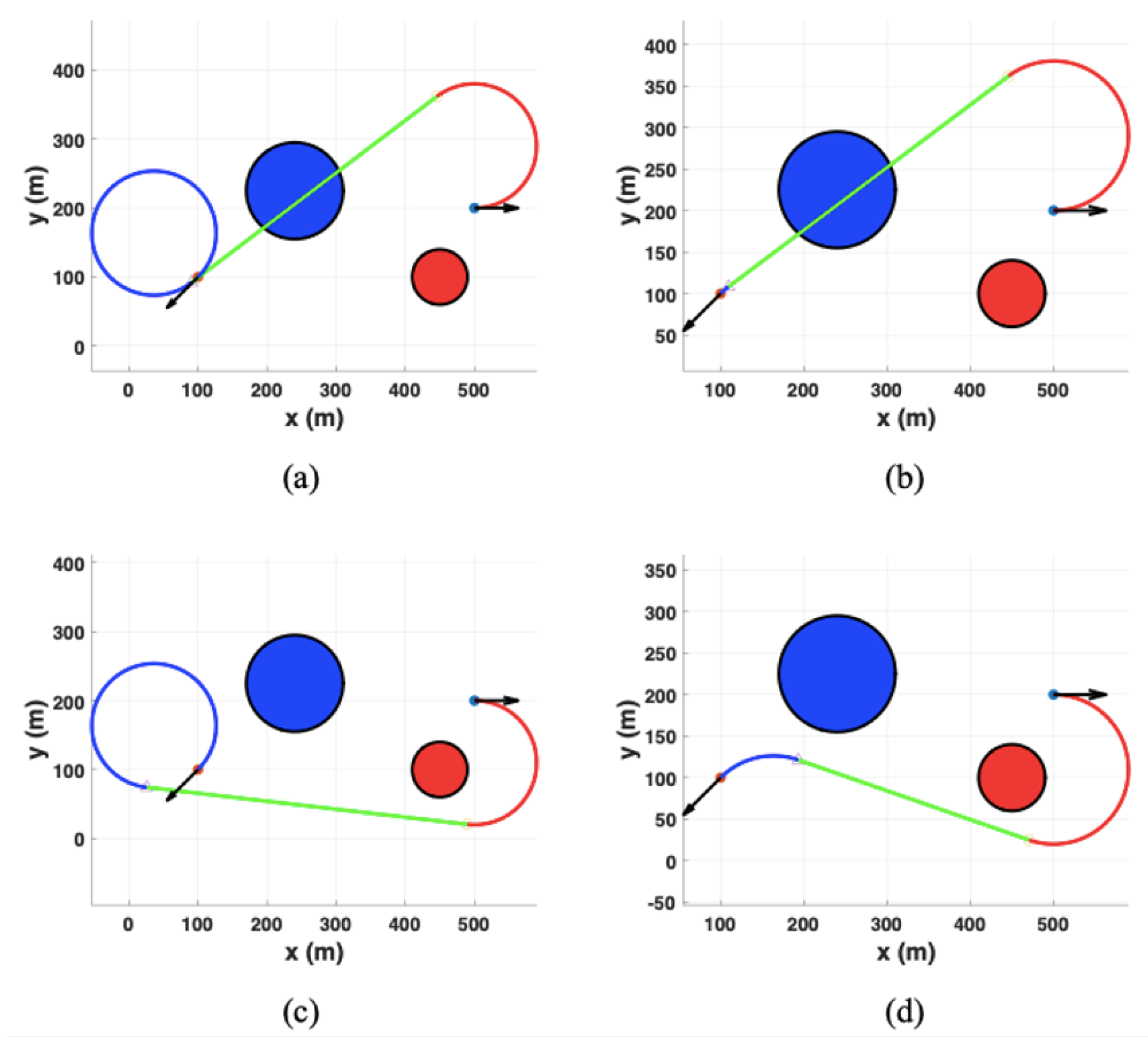
The planned path is deemed feasible if it successfully avoids obstacles. If none of the candidate paths succeed in avoiding obstacles, it becomes necessary to re-plan the path. When the middle tangent segment intersects with the obstacle, the obstacle can be circumvented by adjusting the initial arc and the final arc to make the tangent segment tangential to the obstacle. The final path can thus be viewed as a combination of the two CSC-type Dubins paths. That is, a Dubins path exists between the starting point and the obstacle, and another Dubins path exists between the obstacle and the ending point. In
Figure 7a, the middle tangent segment of the path
, represented by the dotted line, intersects with the obstacle. In contrast, the path
indicated by the solid line represents the feasible path obtained through the obstacle avoidance method. If the starting arc intersects with an obstacle, then the turning radius of the starting arc is increased in order to inscribe the obstacle and avoid it. The final arc that avoids obstacles can be obtained in the same manner. As shown in
Figure 7b, the starting arc of the path
, represented by the dotted line, intersects with obstacles, whereas the path
indicated by the solid line is a feasible path obtained by increasing the turning radius. Note that, in practical planning, it is common to maintain a certain distance between the path and the obstacle to ensure safety, rather than achieve exact tangency.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}