

Nonlinear Rigid-Elastic Coupled Modeling and Oscillation Mechanism Analysis of Rotor-Body-Slung-Load System


Abstract
:1. Introduction
- Rotor dynamics: To provide more lift for the slung load, the main rotor should increase collective pitch. However, high collective pitch destabilizes rotor flap-lag coupled motion such that Category II RBSLCO stability margin reduces [4].
- Fuselage elasticity: According to a representative medium helicopter modal frequency chart [5], helicopter lowest-order fuselage structural modes may be excited by periodic rotor hub load and time-variant hook point force in the frequency range of Category II RBSLCOs.
- All slung load system motions: Except from load swinging motion, sling stretching and load rigid-body rotation should also be modeled because their frequencies are usually in 2.5~8 Hz, which may be related to Category II RBSLCOs.
2. Nonlinear Rigid-Elastic Coupled HSLS Modeling and Validation
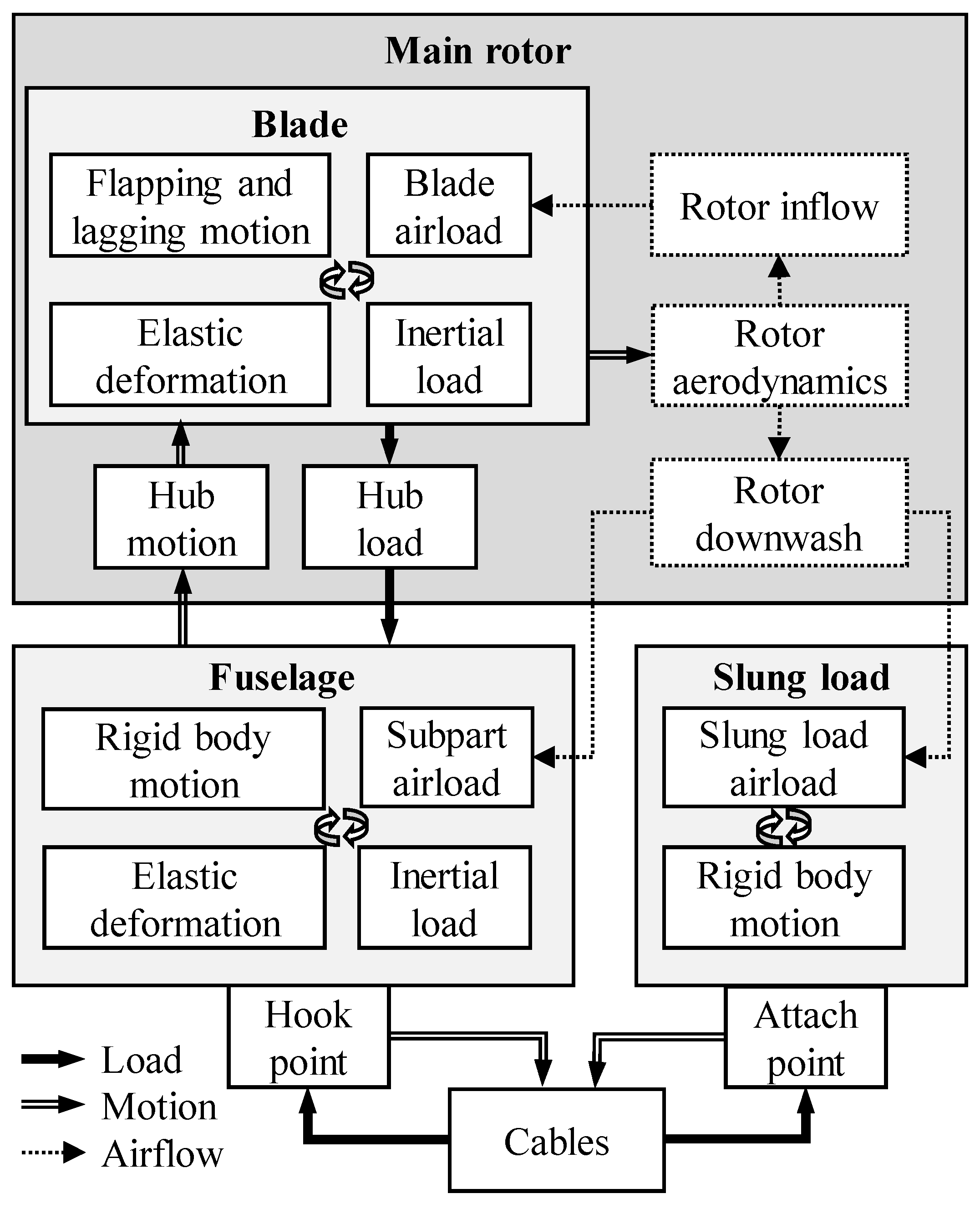
2.1. Nonlinear Helicopter Rigid-Elastic Coupled Modeling
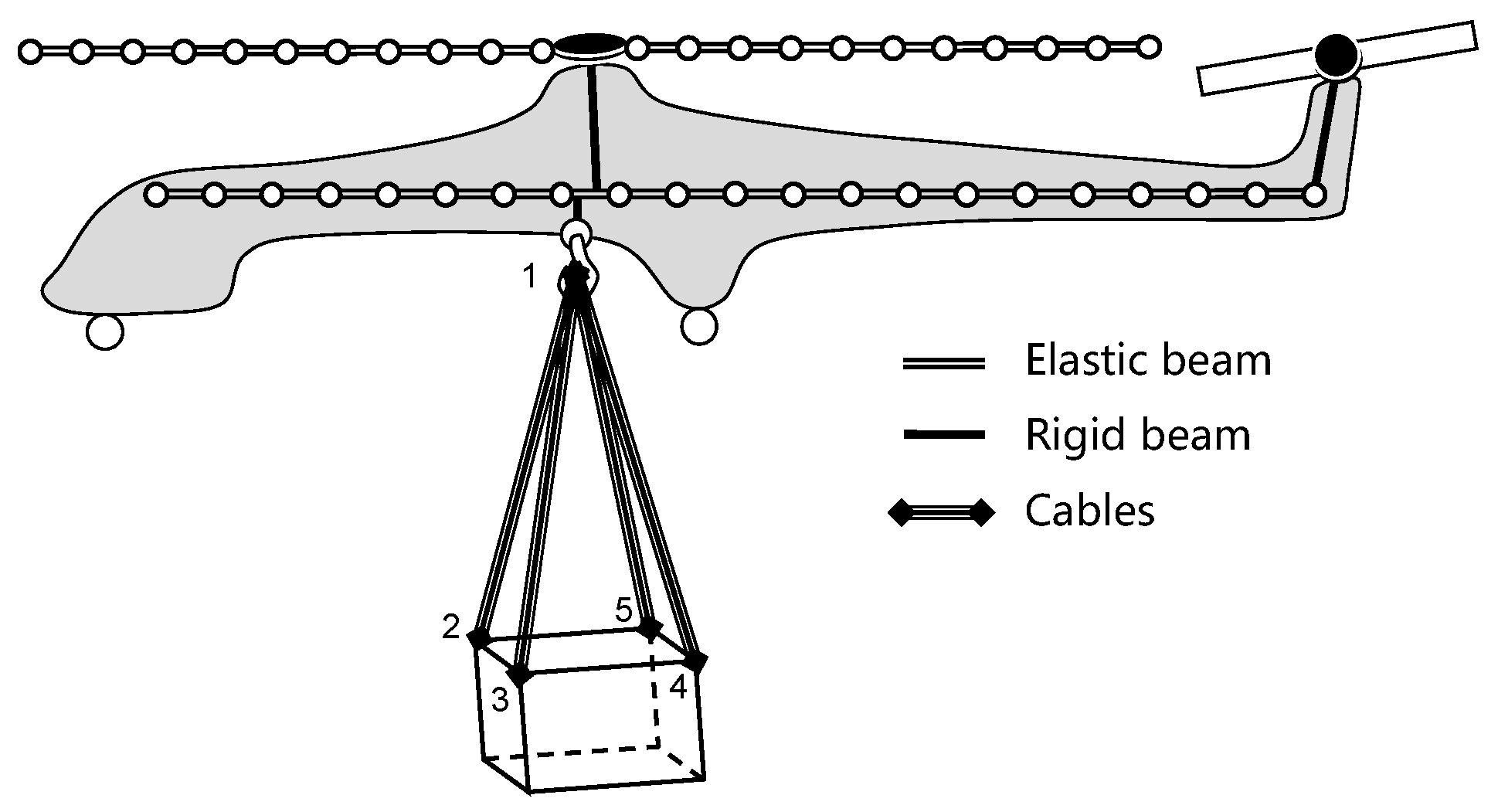
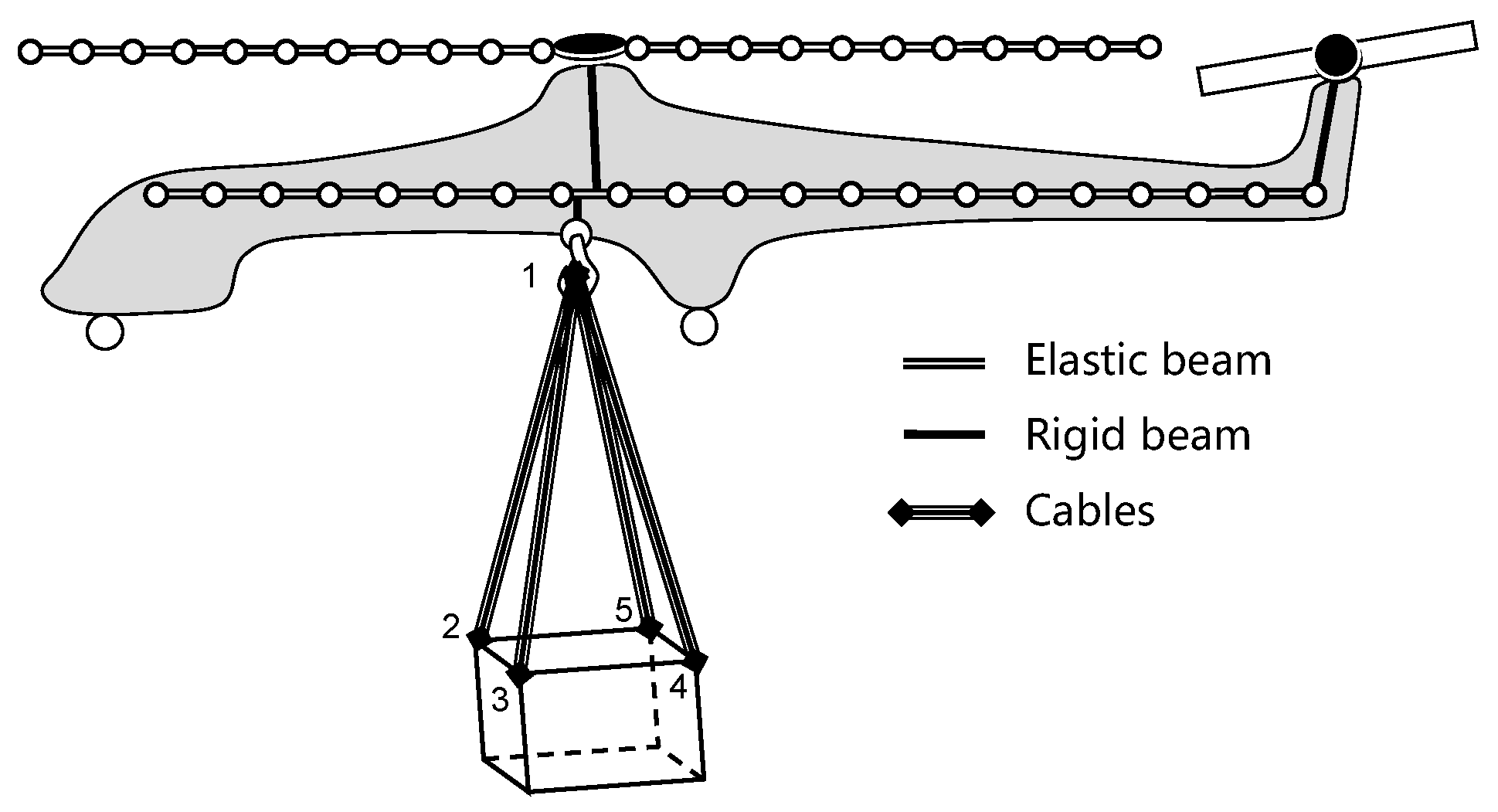
2.2. Slung Load System Modeling
- (1)
- Load Modeling
- (2)
- Cable Modeling
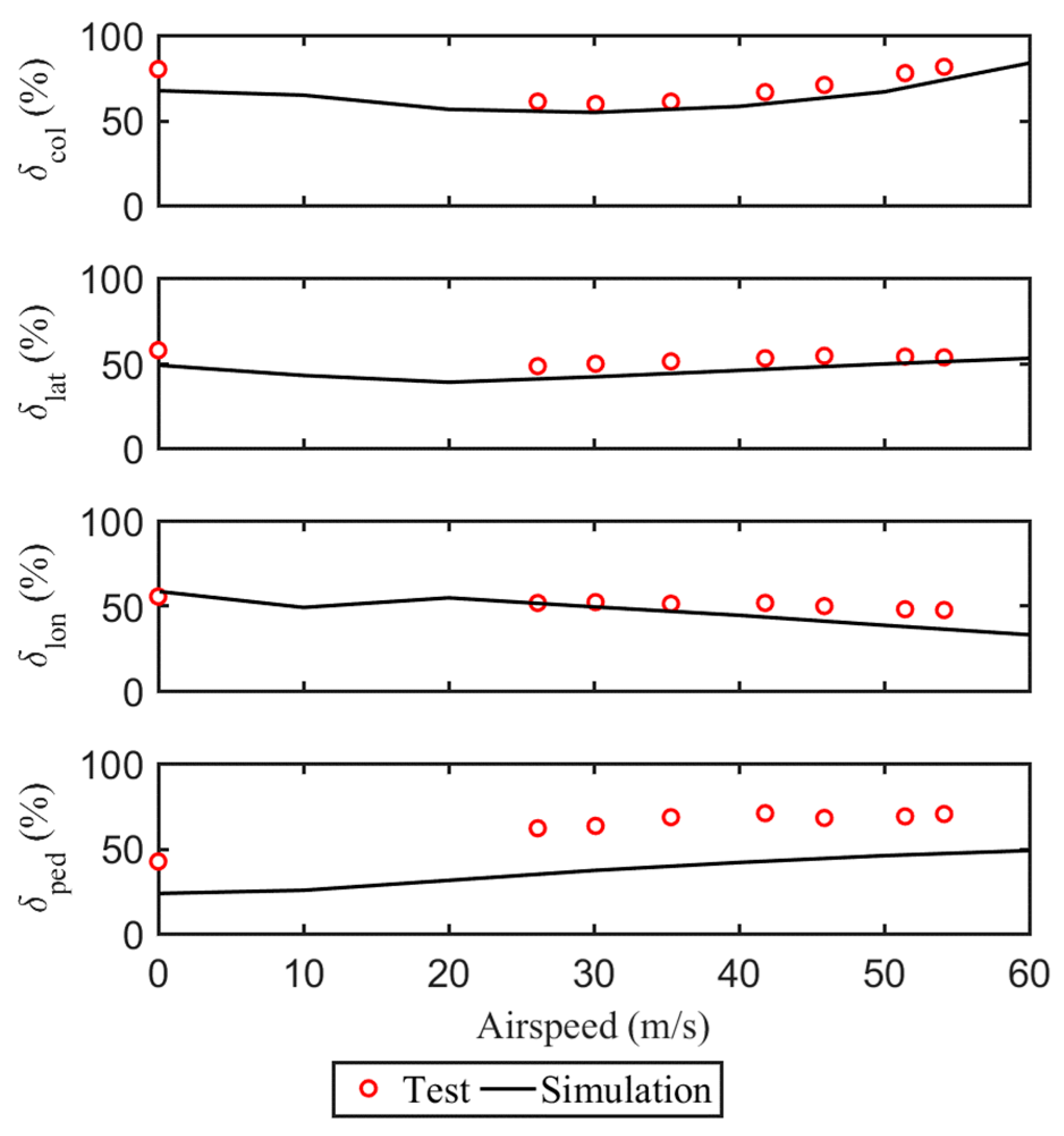
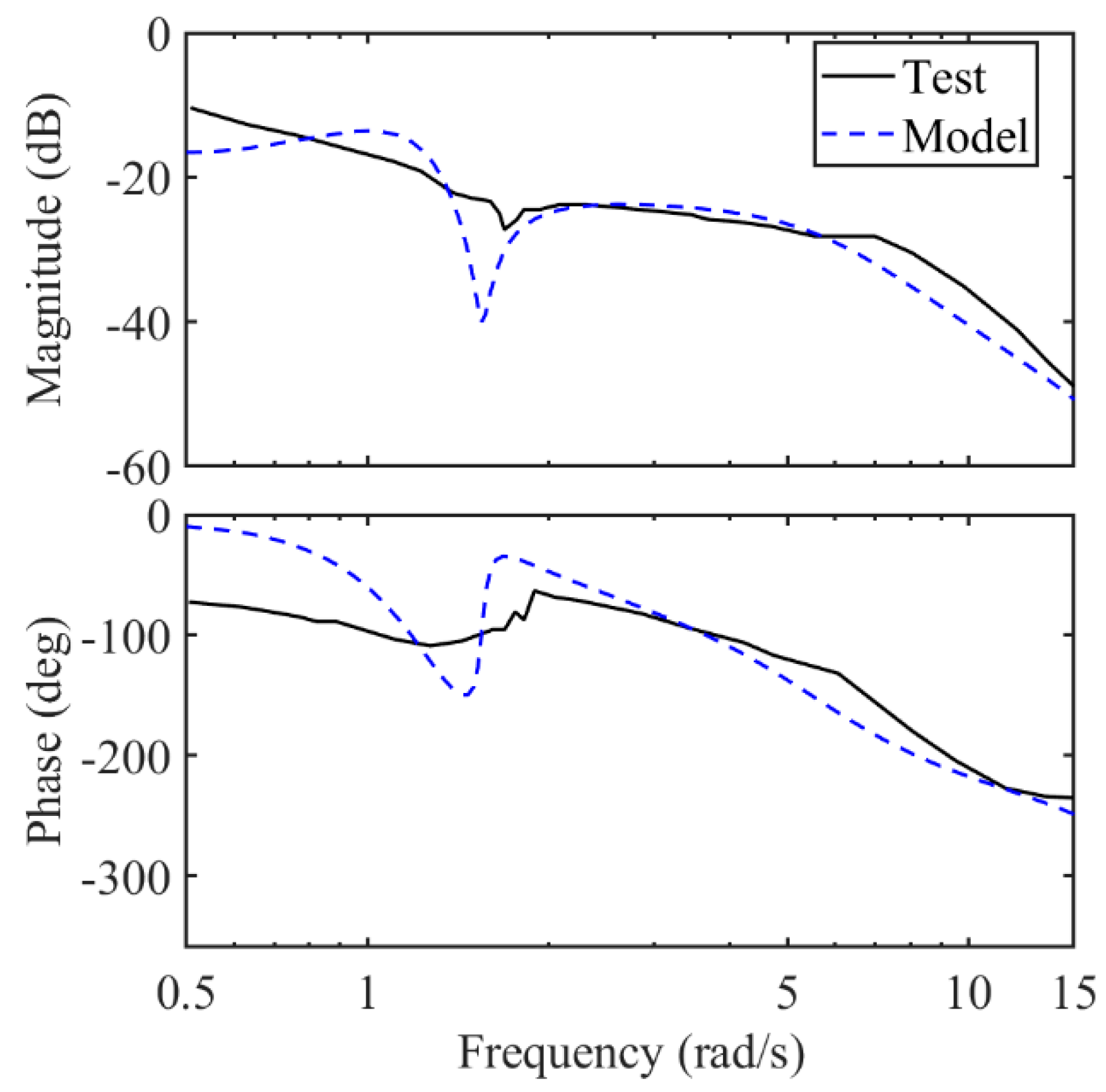
2.3. Coupled HSLS Modeling and Validation
3. Mechanism Analysis of Category II RBSLCO
3.1. Details of Sample HSLS
3.2. Mechanism Analysis
- (1)
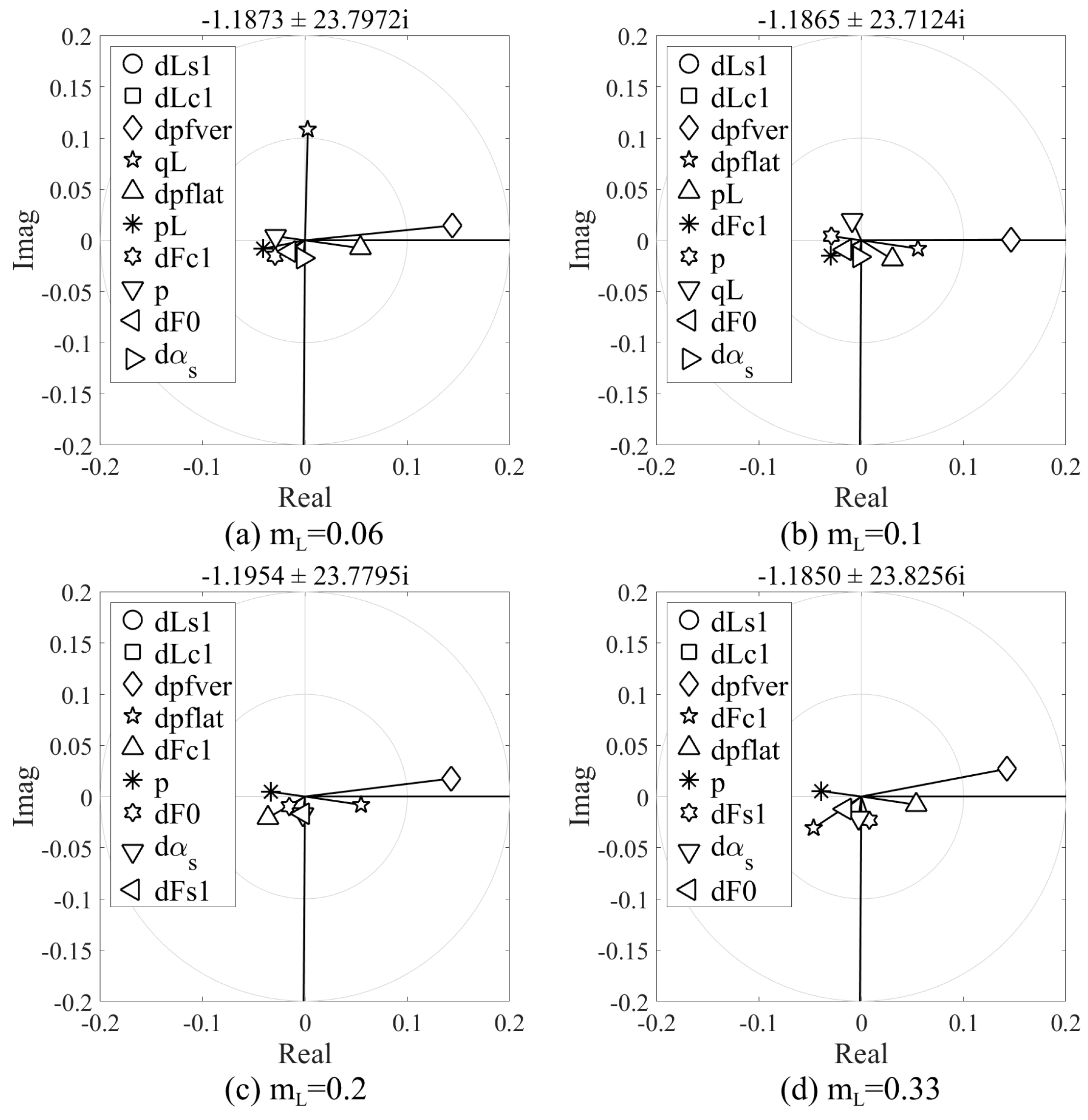
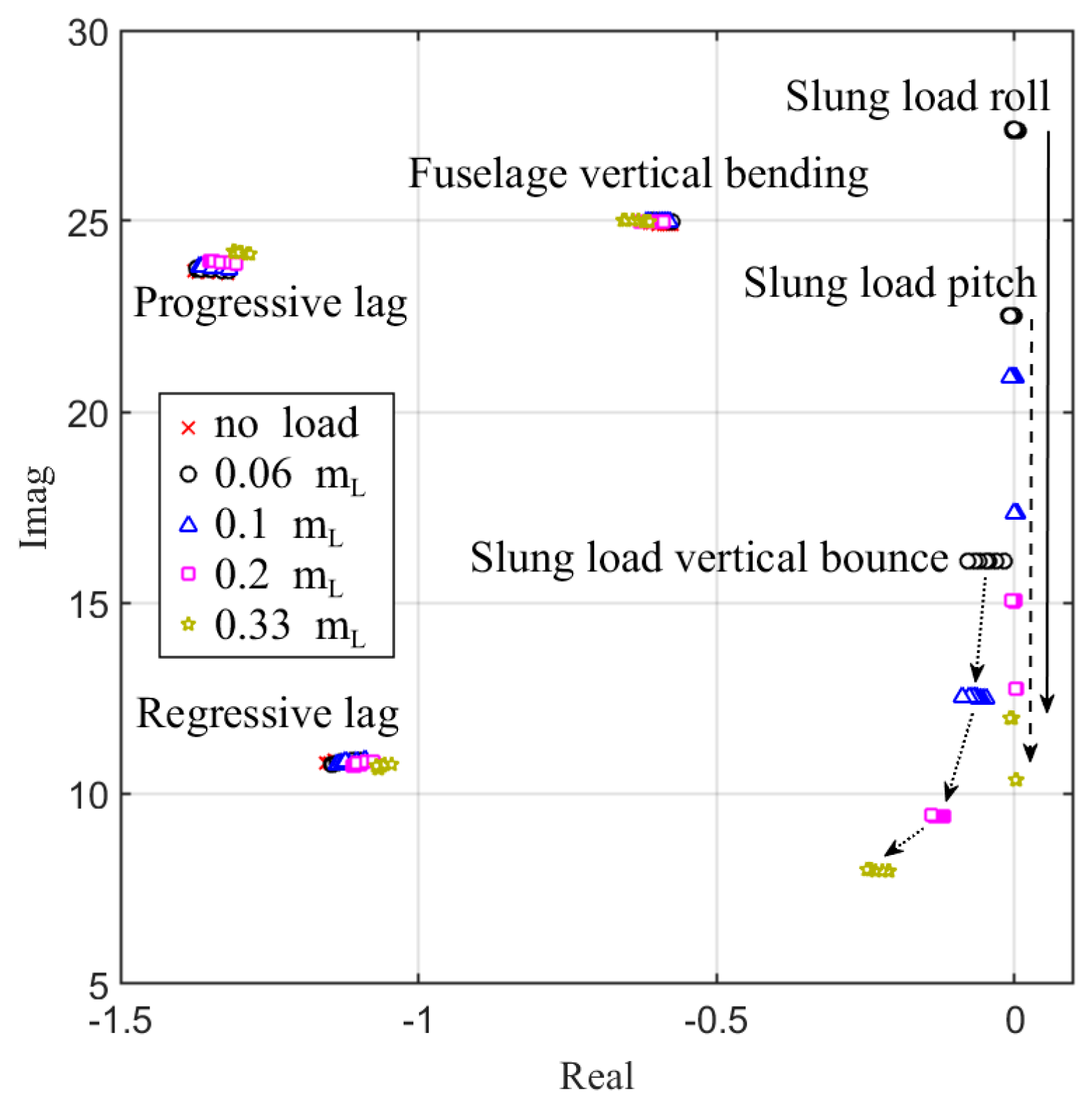
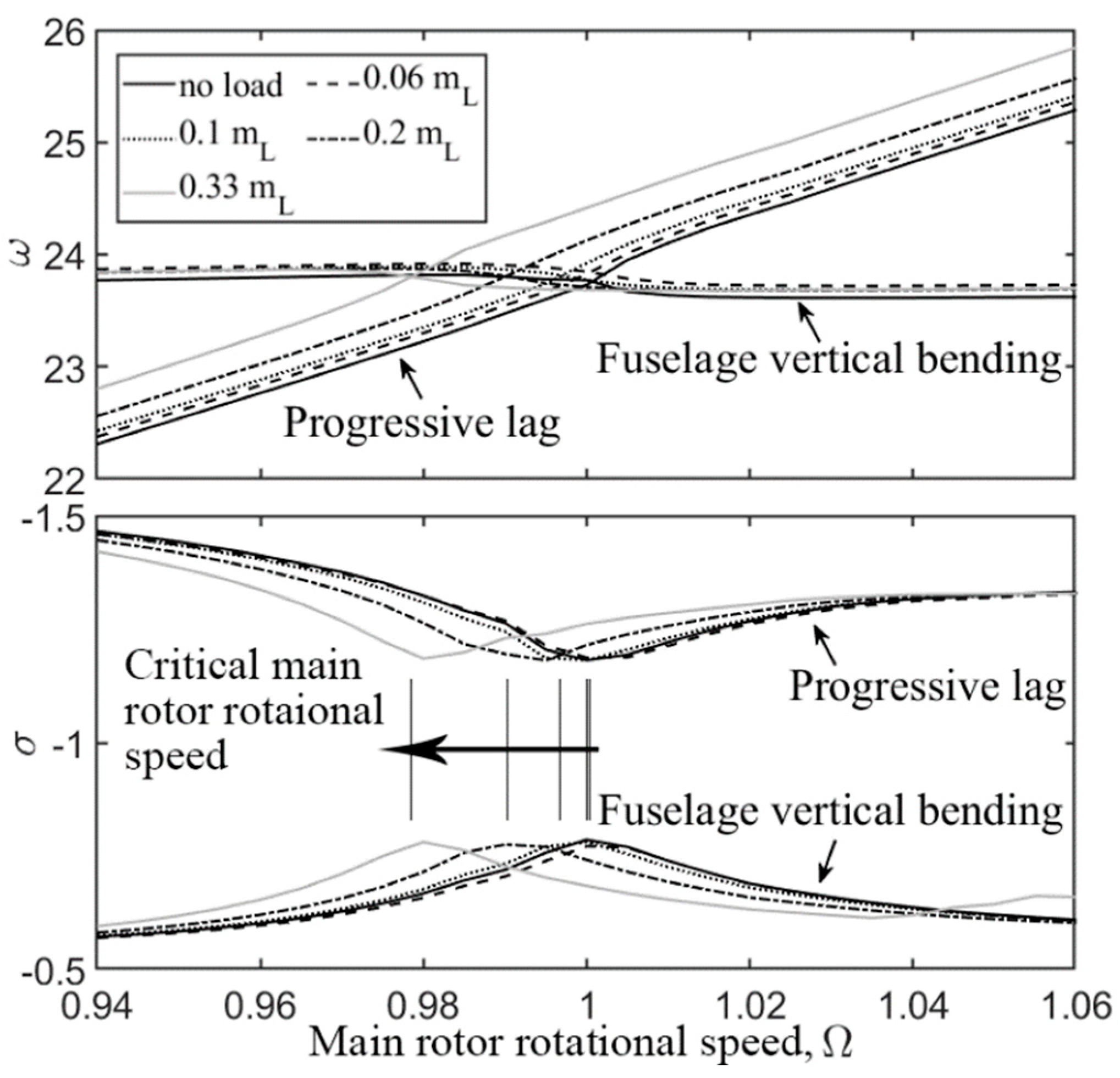
- Influence mechanism of slung load mass on Category II RBSLCO
- (2)
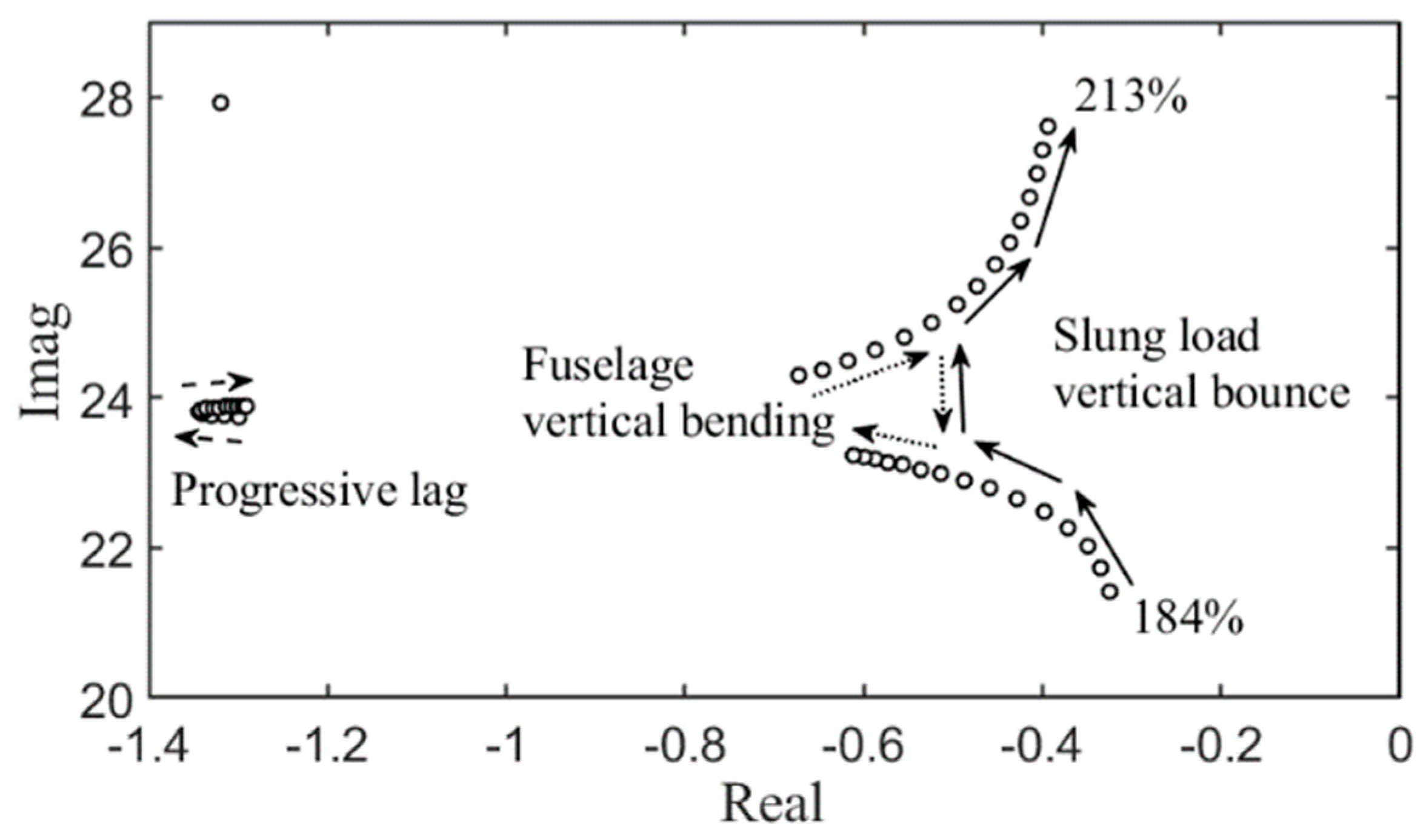
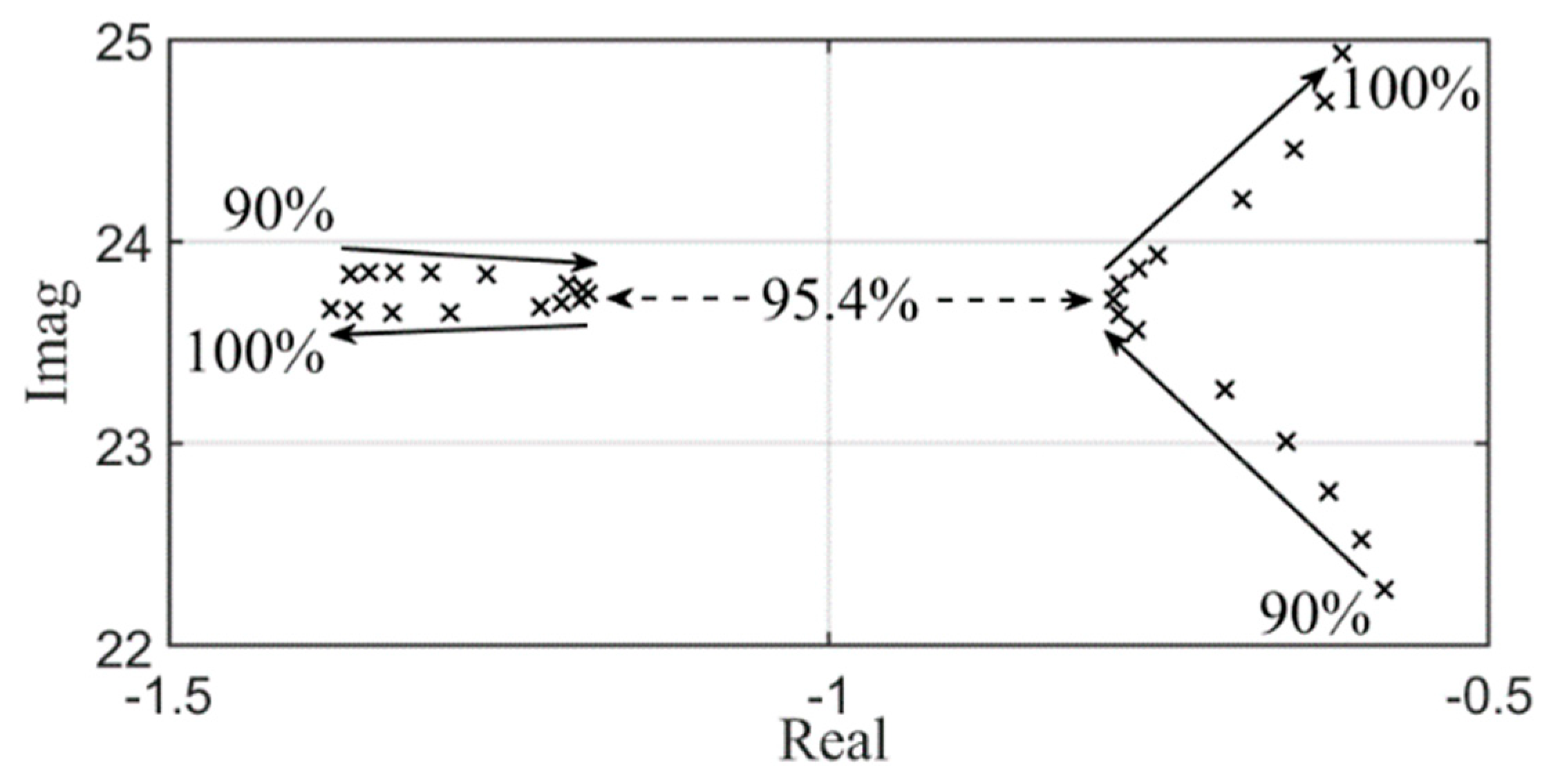
- Influence mechanism of cable stiffness on Category II RBSLCO
4. Conclusions
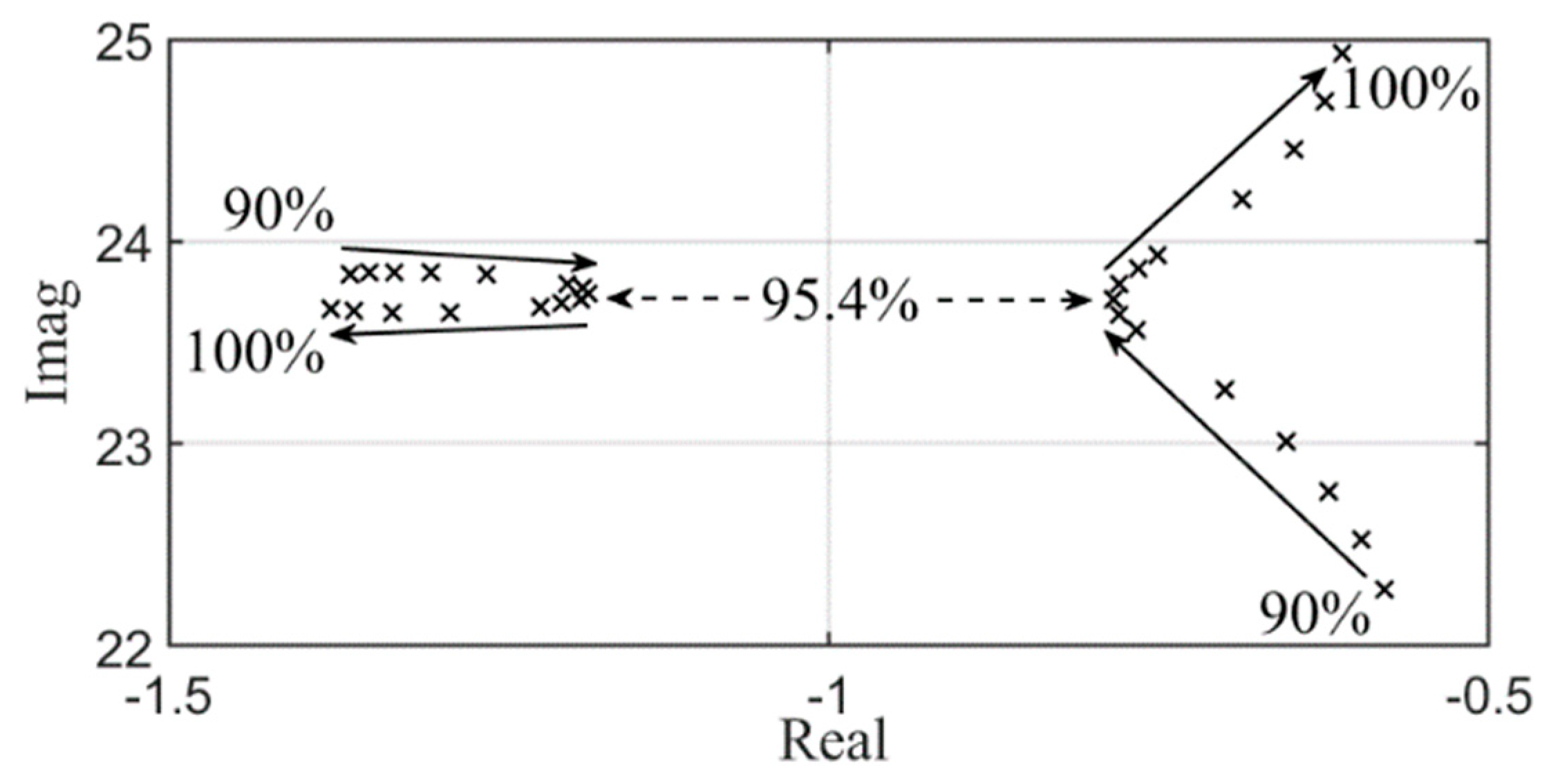
- The coupling between the progressive lag mode and fuselage vertical bending mode became stronger for a larger slung load mass ratio. However, the airspeed had few influences on coupled characteristics. Thus, carrying the heaviest slung load was a vital state for Category II RBSLCO.
- The coupling between the progressive lag mode and fuselage vertical bending mode caused a slight reduction of the stability margin of the progressive lag mode. Carrying a slung load also had a slight influence on the coupled oscillation frequency.
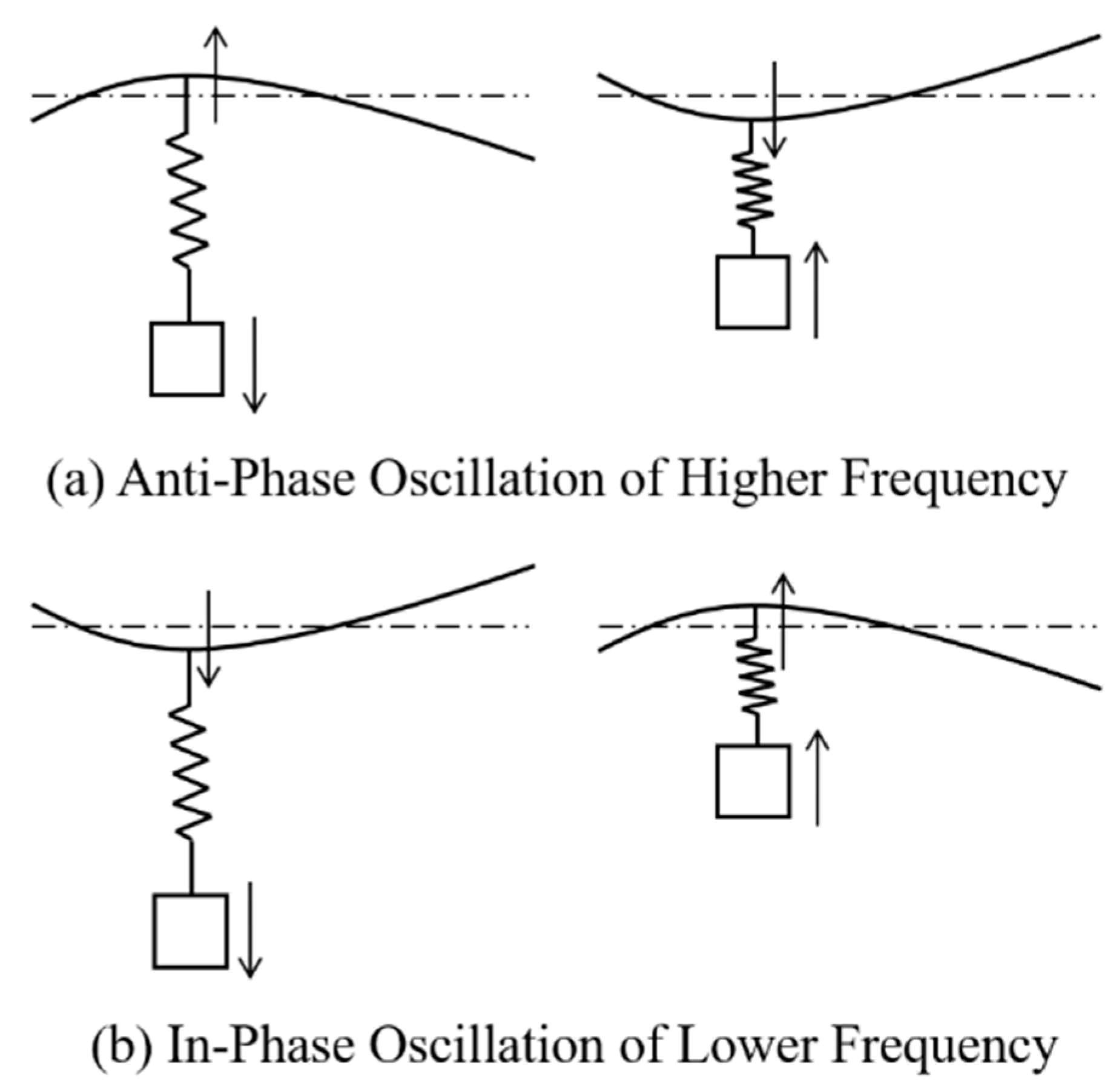
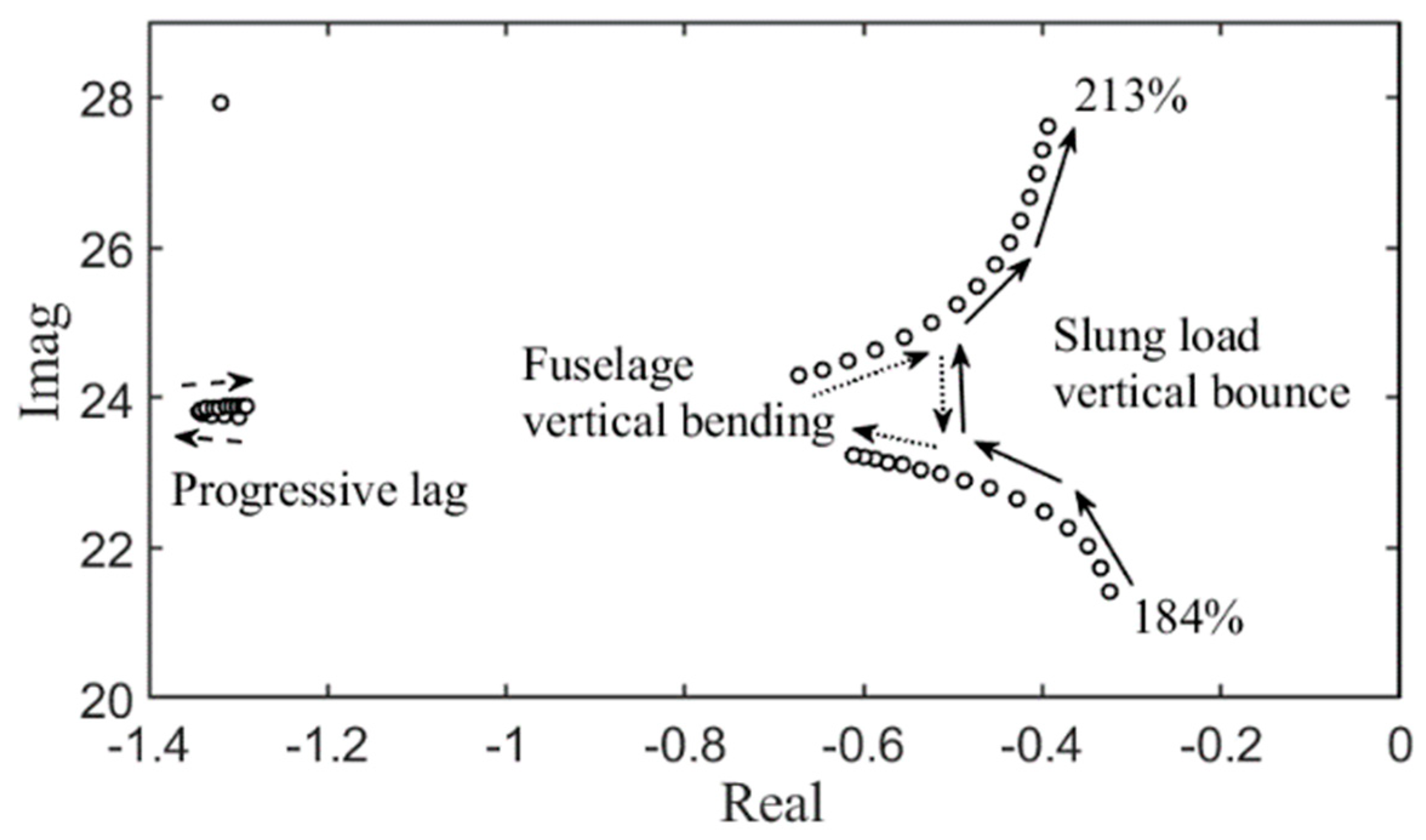
- When cable stiffness was selected improperly, the slung load vertical bouncing mode frequency could approach the fuselage vertical bending mode frequency. This could cause the Category II RBSLCO to behave like the “vertical bouncing” phenomenon. The phenomenon included a high-frequency anti-phase oscillation and a relatively low-frequency in-phase oscillation.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Manwaring, J.C.; Conway, G.A.; Garrett, L.C. Epidemiology and Prevention of Helicopter External Load Accidents. J. Saf. Res. 1998, 29, 107–121. [Google Scholar] [CrossRef]
- Walden, R.B. A Retrospective Survey of Pilot-Structural Coupling Instabilities in Naval Rotorcraft. In Proceedings of the the American Helicopter Society 63rd Annual Forum, Virginia Beach, VA, USA, 1–3 May 2007. [Google Scholar]
- Pavel, M.D.; Jump, M.; Dang-Vu, B.; Masarati, P.; Gennaretti, M.; Ionita, A.; Zaichik, L.; Smaili, H.; Quaranta, G.; Yilmaz, D.; et al. Adverse Rotorcraft Pilot Couplings—Past, Present and Future Challenges. Prog. Aeronaut. Sci. 2013, 62, 1–51. [Google Scholar] [CrossRef]
- Johnson, W. Recent Developments in the Dynamics of Advanced Rotor Systems, 2nd ed.; NASA Ames Research Center: Hampton, VA, USA, 1985. [Google Scholar]
- Kuczynsky, W.A.; Cooper, D.E.; Twomey, W.J.; Howlett, J.J. The Influence of Engine/Fuel Control Design on Helicopter Dynamics and Handling Qualities. J. Am. Helicopter Soc. 1980, 25, 26–34. [Google Scholar] [CrossRef]
- Lucassen, L.R.; Sterk, F.J. Dynamic Stability Analysis of A Hovering Helicopter with a Sling Load. J. Am. Helicopter Soc. 1965, 10, 6–12. [Google Scholar] [CrossRef]
- Dukes, T.A. Maneuvering Heavy Sling Loads Near Hover Part I: Damping the Pendulous Motion. J. Am. Helicopter Soc. 1973, 18, 2–11. [Google Scholar] [CrossRef]
- Ronen, T. Dynamics of a Helicopter with a Sling Load. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 1986. [Google Scholar]
- Cicolani, L.S.; Kanning, G. Equations of Motion of Slung-Load Systems, Including Multilift Systems; Ames Research Center: Moffett Field, CA, USA, 1992. [Google Scholar]
- Cao, Y.; Nie, W.; Wang, Z.; Wan, S. Dynamic Modeling of Helicopter-Slung Load System under the Flexible Sling Hypothesis. Aerosp. Sci. Technol. 2020, 99, 105770. [Google Scholar] [CrossRef]
- Ivler, C. Design and Flight Test of a Cable Angle Feedback Control System for Improving Helicopter Slung Load Operations at Low Speed; Stanford University: Stanford, CA, USA, 2012. [Google Scholar]
- Enciu, J.; Singh, A.; Horn, J.F. Stabilization of External Loads in High-Speed Flight Using an Active Cargo Hook. J. Am. Helicopter Soc. 2020, 65, 1–12. [Google Scholar] [CrossRef]
- Ren, Y.; Li, K.; Ye, H. Modeling and Anti-Swing Control for a Helicopter Slung-Load System. Appl. Math. Comput. 2020, 372, 124990. [Google Scholar] [CrossRef]
- Komerath, N.; Hiremath, N.; Shukla, D. Testing-Based Approach to Determining the Divergence Speed of Slung Loads. Aerospace 2018, 5, 24. [Google Scholar] [CrossRef]
- Shaughnessy, J.D.; Deaux, T.N.; Yenni, K.R. Development and Validation Piloted Simulation Helicopter and External Sling Load; NASA: Hampton, VA, USA, 1979. [Google Scholar]
- Tyson, P.H. Simulation Validation and Flight Prediction of UH−60 Black Hawk Helicopter Slung Load Characteristics. Master’s Thesis, Nacal Postgraduate School, Monterey, CA, USA, 1999. [Google Scholar]
- Cicolani, L.S.; McCoy, A.H.; Sahai, R.; Tyson, P.H.; Tischler, M.B.; Rosen, A.; Tucker, G.E. Flight Test Identification and Simulation of a UH−60A Helicopter and Slung Load. J. Am. Helicopter Soc. 2001, 46, 140–160. [Google Scholar] [CrossRef]
- Cicolani, L.S.; Lusardi, J.; Greaves, L.D.; Robinson, D.; Rosen, A.; Raz, R. Flight Test Results for the Motions and Aerodynamics of a Cargo Container and a Cylindrical Slung Load; Army Aviation-Missile Research Development-Engineering Center: Moffett Field, CA, USA, 2010. [Google Scholar]
- Enciu, J.; Rosen, A. Simulation of Coupled Helicopter–Slung Load–Pilot Dynamics. J. Am. Helicopter Soc. 2017, 62, 1–13. [Google Scholar] [CrossRef]
- Bauchau, O.A.; Rodriguez, J.; Chen, S.-Y. Coupled Rotor-Fuselage Analysis with Finite Motions Using Component Mode Synthesis. J. Am. Helicopter Soc. 2004, 49, 201–211. [Google Scholar] [CrossRef]
- Cribbs, R.C.; Friedmann, P.P.; Chiu, T. Coupled Helicopter Rotor/Flexible Fuselage Aeroelastic Model for Control of Structural Response. AIAA J. 2000, 38, 1777–1788. [Google Scholar] [CrossRef]
- Meirovitch, L.; Tuzcu, I. The Lure of the MeanAxes. J. Appl. Mech. 2007, 74, 497–504. [Google Scholar] [CrossRef]
- Sahasrabudhe, V.; Faynberg, A.; Kubik, S.; Tonello, O.; Xin, H.; Engel, D.; Renfrow, J. CH-53K Control Laws: An Overview and Some Analytical Results. In Proceedings of the the American Helicopter Society 66th Annual Forum, Phoenix, AZ, USA, 11–13 May 2010. [Google Scholar]
- Sahasrabudhe, V.; Pozdin, M.; Cheng, R.; Tischler, M.; Stumm, A.; Lavin, M. Balancing CH-53K Handling Qualities and Stability Margin Requirements in the Presence of Heavy External Loads. In Proceedings of the the American Helicopter Society 63rd Annual Forum, Virginia Beach, VA, USA, 1–3 May 2007. [Google Scholar]
- Masarati, P.; Muscarello, V.; Quaranta, G. Linearized Aeroservoelastic Analysis of Rotary-Wing Aircraft. In Proceedings of the 36th European Rotorcraft Forum, Paris, France, 7–9 September 2010; Association Aéronautique & Astronautique de France: Paris, France, 2010. [Google Scholar]
- Wang, L.; Chen, R. Nonlinear Helicopter Rigid-Elastic Coupled Modeling with Its Applications on Aeroservoelasticity Analysis. AIAA J. 2022, 60, 102–112. [Google Scholar]
- Gassaway, B.; Strope, K.; Cicolani, L.; Lusardi, J.; He, C.; Robinson, M.D. Predictive Capabilities of a UH−60 FLIGHTLAB® Model with an External Sling Load. In Proceedings of the American Helicopter Society 62nd Annual Forum, Phoenix, AZ, USA, 9–11 May 2006. [Google Scholar]
- Dutton, W.J. Parametric Analysis and Preliminary Design of a Shaft-Driven Rotor System for a Heavy Lift Helicopter; Lockheed-California Company Division of Lockheed Aircraft Corporation: Burbank, CA, USA, 1967. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tag | Mass, kg | Inertia kg·m2 | |||
|---|---|---|---|---|---|
| no load | 36,000 | 214,880 | 866,540 | 735,540 | |
| 0.06 | Helicopter | 33,936 | 202,560 | 816,858 | 693,369 |
| Slung Load | 2064 | 1874 | 1346 | 1701 | |
| 0.1 | Helicopter | 32,400 | 193,392 | 779,886 | 661,986 |
| Slung Load | 3600 | 2715 | 1951 | 2466 | |
| 0.2 | Helicopter | 28,800 | 171,904 | 693,232 | 588,432 |
| Slung Load | 7200 | 4310 | 3097 | 3914 | |
| 0.33 | Helicopter | 24,000 | 143,253 | 577,693 | 490,360 |
| Slung Load | 12,000 | 6058 | 4353 | 5502 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, Y.; Wang, L.; Zhou, Z.; Chen, R. Nonlinear Rigid-Elastic Coupled Modeling and Oscillation Mechanism Analysis of Rotor-Body-Slung-Load System. Aerospace 2023, 10, 872. https://doi.org/10.3390/aerospace10100872
Tian Y, Wang L, Zhou Z, Chen R. Nonlinear Rigid-Elastic Coupled Modeling and Oscillation Mechanism Analysis of Rotor-Body-Slung-Load System. Aerospace. 2023; 10(10):872. https://doi.org/10.3390/aerospace10100872
Chicago/Turabian StyleTian, Yu, Luofeng Wang, Zhongliang Zhou, and Renliang Chen. 2023. "Nonlinear Rigid-Elastic Coupled Modeling and Oscillation Mechanism Analysis of Rotor-Body-Slung-Load System" Aerospace 10, no. 10: 872. https://doi.org/10.3390/aerospace10100872
APA StyleTian, Y., Wang, L., Zhou, Z., & Chen, R. (2023). Nonlinear Rigid-Elastic Coupled Modeling and Oscillation Mechanism Analysis of Rotor-Body-Slung-Load System. Aerospace, 10(10), 872. https://doi.org/10.3390/aerospace10100872