
Spraying Effects of UAV Application on Droplet Effectiveness in Two Vine Trellis Systems of High-Slope Terrace Vineyards


Abstract
1. Introduction
2. Materials and Methods
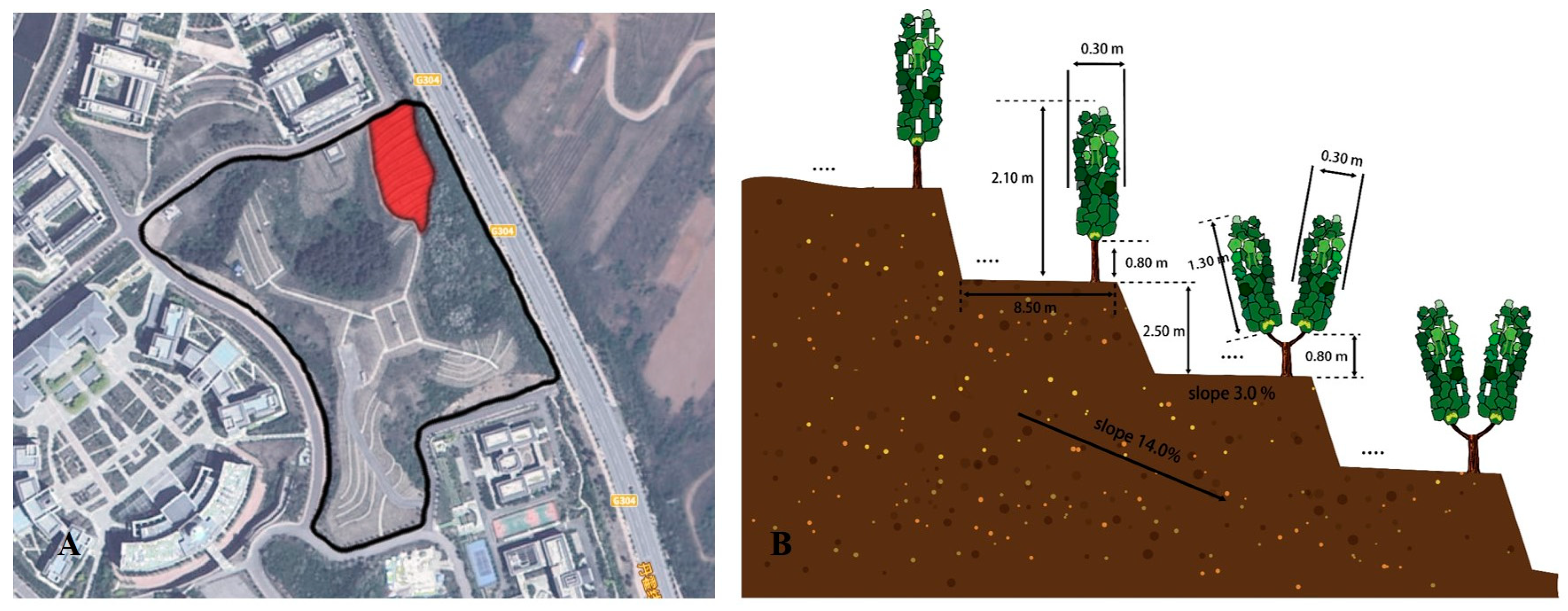
2.1. Experimental Fields
2.2. Parameters of Four-Rotor UAV and Knapsack Electric Sprayer (KES)
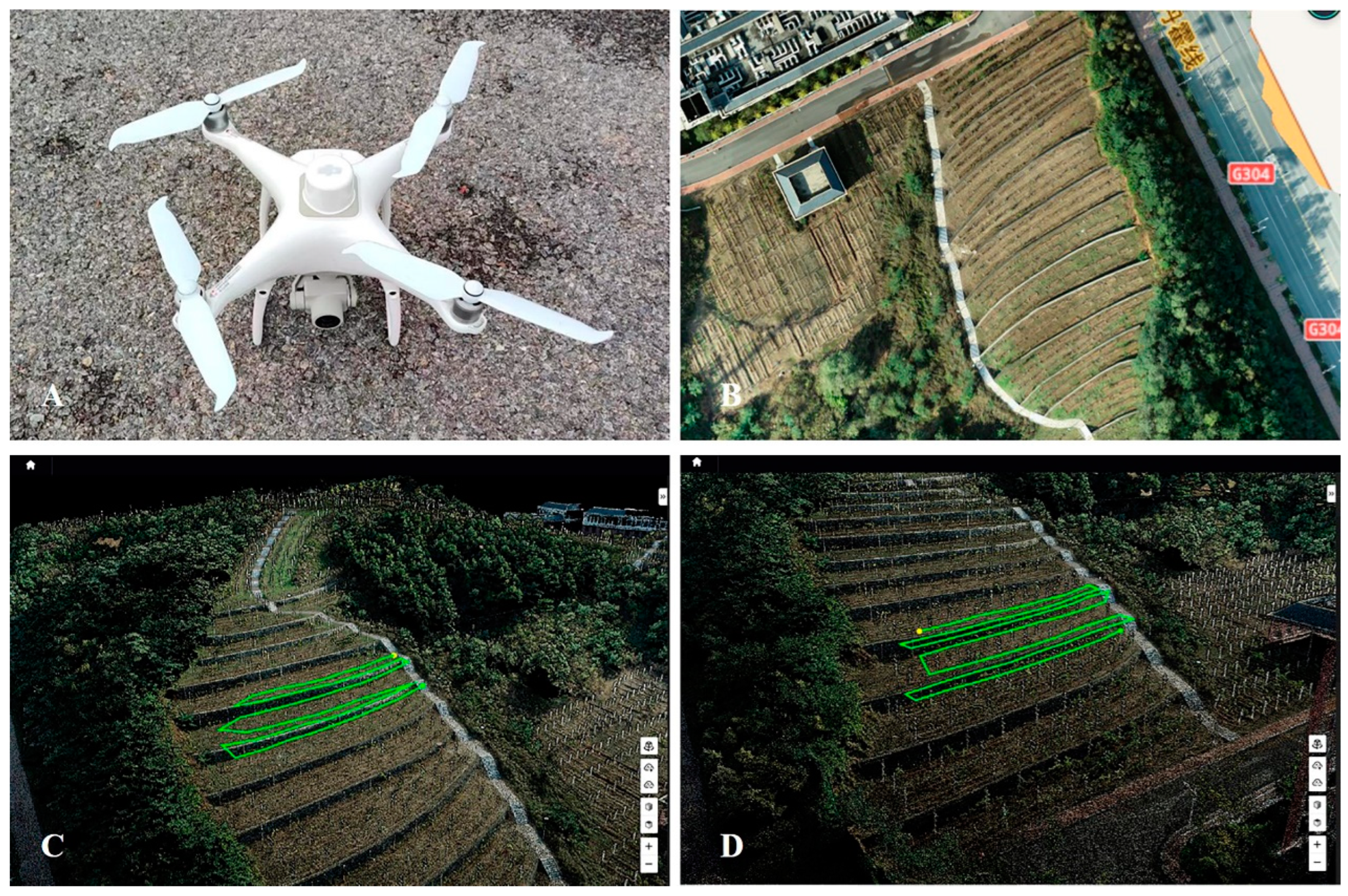
2.3. Route Planning for UAV Spraying
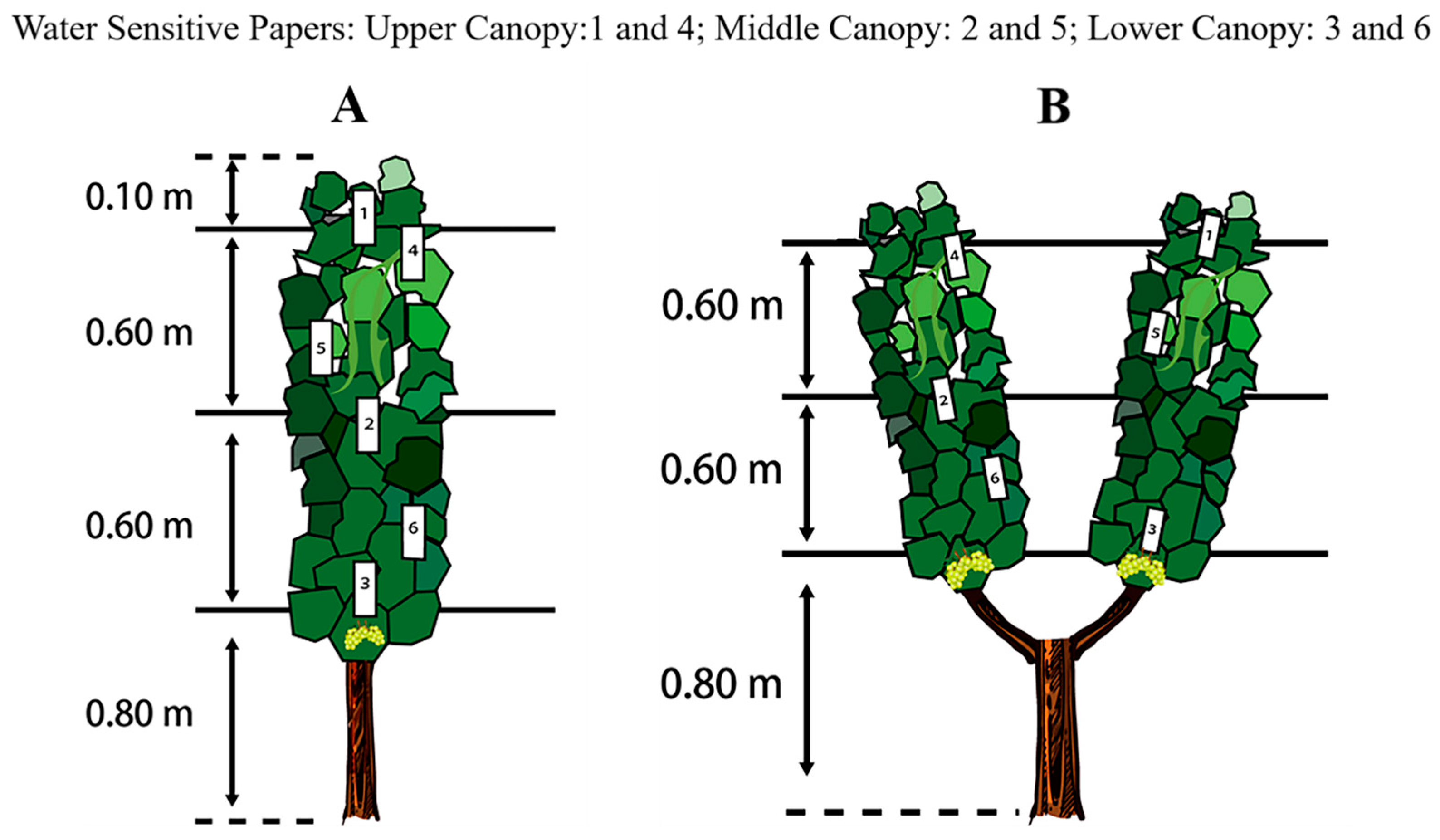
2.4. Placement of Water Sensitive Paper (WSP) and Spraying Process
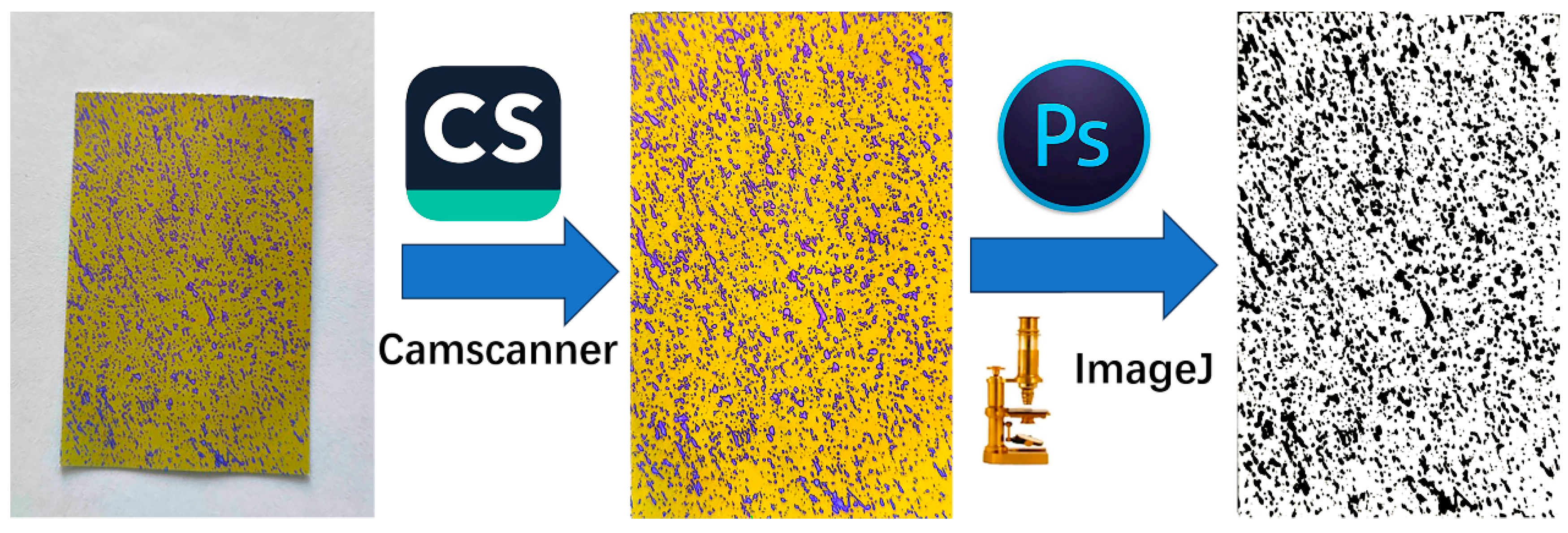
2.5. Image Processing and Analysis
2.6. Statistical Analysis
3. Results and Discussion
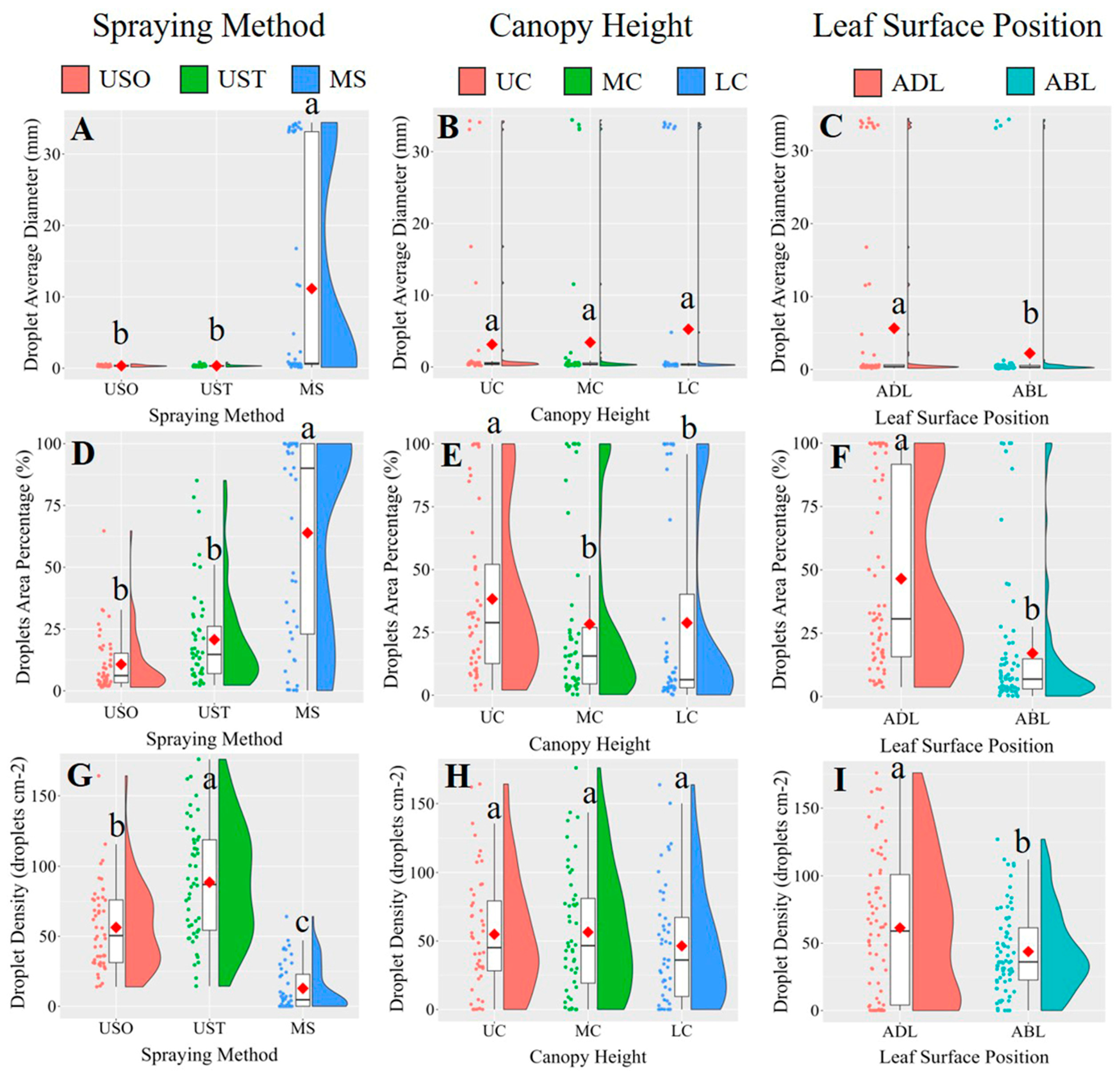
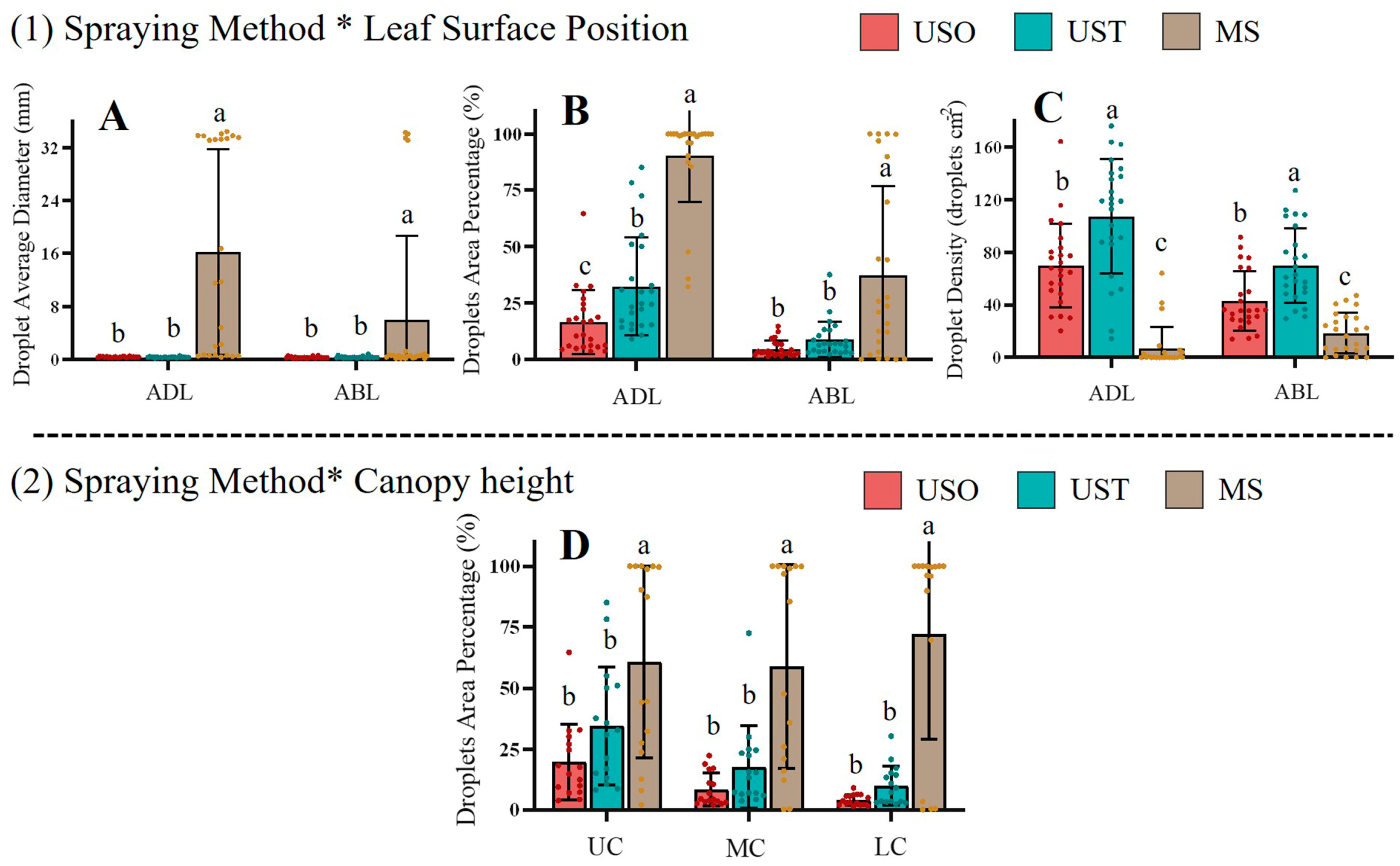
3.1. Effects of Treatments on Vertical Shoot Positioning (VSP) Trellis System Vines
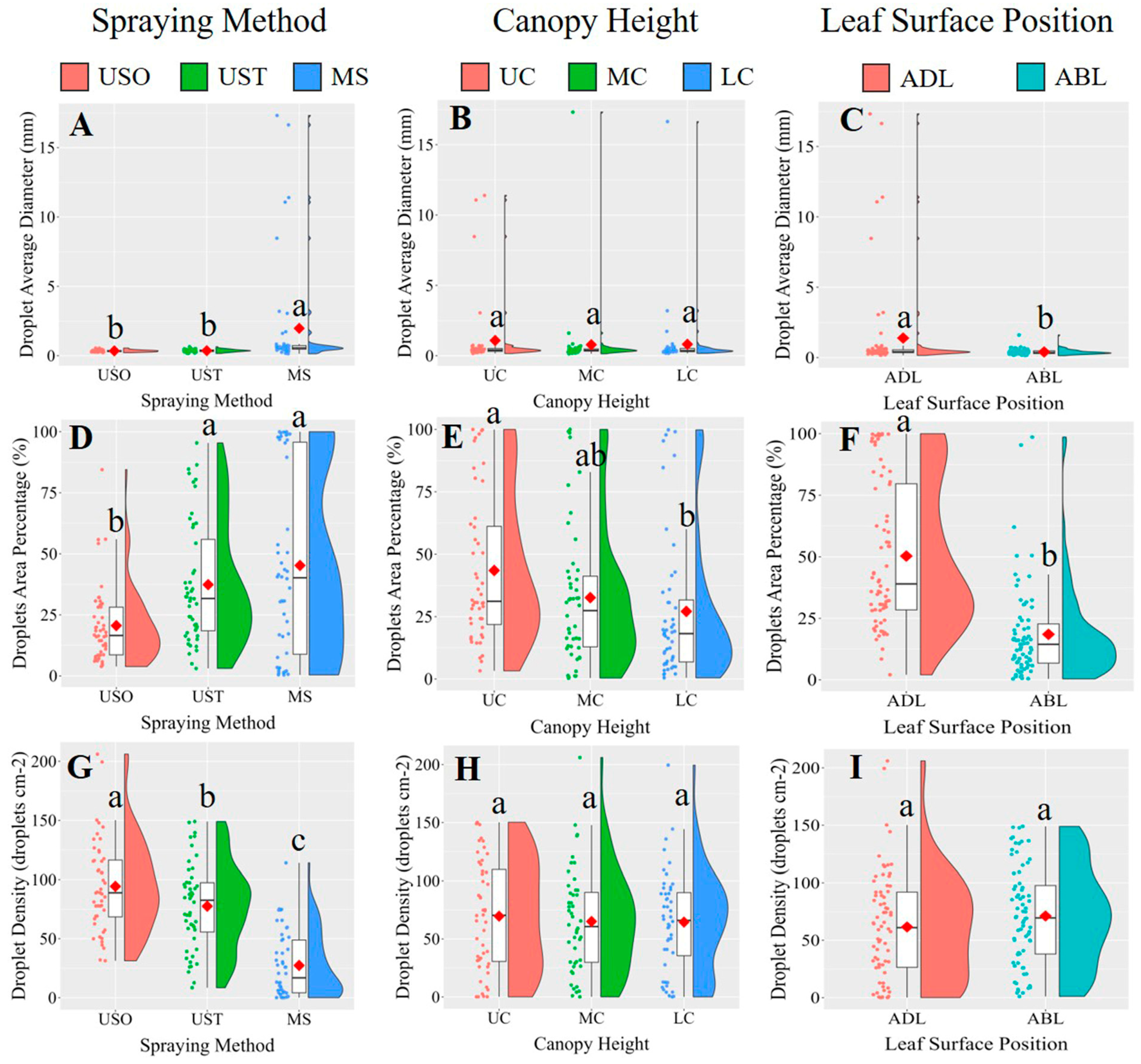
3.2. Effects of Treatments on Y-Shaped Trellis System Vines
3.3. Comparative Analysis of Efficiency Between Manual Spraying and Unmanned Aerial Vehicle (UAV) Sprayings
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tambo, J.A.; Uzayisenga, B.; Mugambi, I.; Bundi, M.; Silvestri, S. Plant clinics, farm performance and poverty alleviation: Panel data evidence from Rwanda. World Dev. 2020, 129, 104881. [Google Scholar] [CrossRef]
- Fernández-Getino, A.-P. Phytosanitary prescription to minimize pesticide use risk on human and animal health and the environment at European level. J. Environ. Sci. Health B 2021, 56, 1031–1041. [Google Scholar] [CrossRef] [PubMed]
- Sarri, D.; Martelloni, L.; Rimediotti, M.; Lisci, R.; Lombardo, S.; Vieri, M. Testing a multi-rotor unmanned aerial vehicle for spray application in high slope terraced vineyard. JAE 2019, 50, 38–47. [Google Scholar] [CrossRef]
- Martinez-Guanter, J.; Agüera, P.; Agüera, J.; Pérez-Ruiz, M. Spray and economics assessment of a UAV-based ultra-low-volume application in olive and citrus orchards. Precis. Agric. 2019, 21, 226–243. [Google Scholar] [CrossRef]
- Wang, G.; Lan, Y.; Yuan, H.; Qi, H.; Chen, P.; Ouyang, F.; Han, Y. Comparison of Spray Deposition, Control Efficacy on Wheat Aphids and Working Efficiency in the Wheat Field of the Unmanned Aerial Vehicle with Boom Sprayer and Two Conventional Knapsack Sprayers. Appl. Sci. 2019, 9, 218. [Google Scholar] [CrossRef]
- Qin, W.C.; Qiu, B.J.; Xue, X.Y.; Chen, C.; Xu, Z.F.; Zhou, Q.Q. Droplet deposition and control effect of insecticides sprayed with an unmanned aerial vehicle against plant hoppers. Crop Prot. 2016, 85, 79–88. [Google Scholar] [CrossRef]
- Meng, Y.; Su, J.; Song, J.; Chen, W.-H.; Lan, Y. Experimental evaluation of UAV spraying for peach trees of different shapes: Effects of operational parameters on droplet distribution. Comput. Electron. Agric. 2020, 170, 105282. [Google Scholar] [CrossRef]
- Chen, P.; Douzals, J.P.; Lan, Y.; Cotteux, E.; Delpuech, X.; Pouxviel, G.; Zhan, Y. Characteristics of unmanned aerial spraying systems and related spray drift: A review. Front. Plant Sci. 2022, 13, 870956. [Google Scholar] [CrossRef]
- Huang, Y.; Hoffmann, W.C.; Lan, Y.; Wu, W.; Fritz, B.K. Development of a spray system for an unmanned aerial vehicle platform. Appl. Eng. Agric. 2009, 25, 803–809. [Google Scholar] [CrossRef]
- Wang, C.; Herbst, A.; Zeng, A.; Wongsuk, S.; Qiao, B.; Qi, P.; Bonds, J.; Overbeck, V.; Yang, Y.; Gao, W.; et al. Assessment of spray deposition, drift and mass balance from unmanned aerial vehicle sprayer using an artificial vineyard. Sci. Total Environ. 2021, 777, 146181. [Google Scholar] [CrossRef]
- Raliya, R.; Guo, S.; Li, J.; Yao, W.; Zhan, Y.; Li, Y.; Shi, Y. Distribution characteristics on droplet deposition of wind field vortex formed by multi-rotor UAV. PLoS ONE 2019, 14, e0220024. [Google Scholar] [CrossRef]
- Damalas, C.A.; Abdollahzadeh, G. Farmers’ use of personal protective equipment during handling of plant protection products: Determinants of implementation. Sci. Total Environ. 2016, 571, 730–736. [Google Scholar] [CrossRef] [PubMed]
- González Jorge, H.; González De Santos, L.M.; Fariñas Álvarez, N.; Novo Gómez, A.; Martínez Sánchez, J.; Aldao Pensado, E. Operational study of drone spraying application of phytosanitary products in vineyards. Dyna Ing. E Ind. 2022, 97, 23–26. [Google Scholar] [CrossRef] [PubMed]
- Damalas, C.A.; Eleftherohorinos, I.G. Pesticide exposure, safety issues, and risk assessment indicators. Int. J. Environ. Res. Public Health 2011, 8, 1402–1419. [Google Scholar] [CrossRef] [PubMed]
- Morales-Rodríguez, P.A.; Cano Cano, E.; Villena, J.; López-Perales, J.A. A comparison between conventional sprayers and new UAV sprayers: A study case of vineyards and olives in extremadura (Spain). Agronomy 2022, 12, 1307. [Google Scholar] [CrossRef]
- Kharim, M.N.A.; Wayayok, A.; Shariff, A.R.M.; Abdullah, A.F.; Husin, E.M. Droplet deposition density of organic liquid fertilizer at low altitude UAV aerial spraying in rice cultivation. Comput. Electron. Agric. 2019, 167, 105045. [Google Scholar] [CrossRef]
- Tang, Y.; Hou, C.J.; Luo, S.M.; Lin, J.T.; Yang, Z.; Huang, W.F. Effects of operation height and tree shape on droplet deposition in citrus trees using an unmanned aerial vehicle. Comput. Electron. Agric. 2018, 148, 1–7. [Google Scholar] [CrossRef]
- Li, L.; Hu, Z.; Liu, Q.; Yi, T.; Han, P.; Zhang, R.; Pan, L. Effect of flight velocity on droplet deposition and drift of combined pesticides sprayed using an unmanned aerial vehicle sprayer in a peach orchard. Front. Plant Sci. 2022, 13, 981494. [Google Scholar] [CrossRef]
- Chen, S.; Lan, Y.; Zhou, Z.; Ouyang, F.; Wang, G.; Huang, X.; Deng, X.; Cheng, S. Effect of Droplet Size Parameters on Droplet Deposition and Drift of Aerial Spraying by Using Plant Protection UAV. Agronomy 2020, 10, 195. [Google Scholar] [CrossRef]
- Chen, P.; Lan, Y.; Huang, X.; Qi, H.; Wang, G.; Wang, J.; Wang, L.; Xiao, H. Droplet Deposition and Control of Planthoppers of Different Nozzles in Two-Stage Rice with a Quadrotor Unmanned Aerial Vehicle. Agronomy 2020, 10, 303. [Google Scholar] [CrossRef]
- Shan, C.; Wang, G.; Wang, H.; Xie, Y.; Wang, H.; Wang, S.; Chen, S.; Lan, Y. Effects of droplet size and spray volume parameters on droplet deposition of wheat herbicide application by using UAV. IJABE 2021, 14, 74–81. [Google Scholar] [CrossRef]
- Xiao, Q.; Xin, F.; Lou, Z.; Zhou, T.; Wang, G.; Han, X.; Lan, Y.; Fu, W. Effect of Aviation Spray Adjuvants on Defoliant Droplet Deposition and Cotton Defoliation Efficacy Sprayed by Unmanned Aerial Vehicles. Agronomy 2019, 9, 217. [Google Scholar] [CrossRef]
- Xiao, Q.; Du, R.; Yang, L.; Han, X.; Zhao, S.; Zhang, G.; Fu, W.; Wang, G.; Lan, Y. Comparison of Droplet Deposition Control Efficacy on Phytophthora capsica and Aphids in the Processing Pepper Field of the Unmanned Aerial Vehicle and Knapsack Sprayer. Agronomy 2020, 10, 215. [Google Scholar] [CrossRef]
- Giles, D.; Billing, R. Deployment and performance of a UAV for crop spraying. Chem. Eng. Trans. 2015, 44, 307–312. [Google Scholar] [CrossRef]
- Giles, D.; Billing, R. Unmanned aerial platforms for spraying: Deployment and performance. Asp. Appl. Biol. 2014, 63–69. [Google Scholar]
- Sassu, A.; Psiroukis, V.; Bettucci, F.; Ghiani, L.; Fountas, S.; Gambella, F. Unmanned aerial system plant protection products spraying performance evaluation on a vineyard. Precis. Agric. 2024, 25, 2082–2112. [Google Scholar] [CrossRef]
- Leece, D. Foliar absorption in Prunus domestica LI Nature and development of the surface wax barrier. Funct. Plant Biol. 1978, 5, 749–766. [Google Scholar] [CrossRef]
- Dong, Y.; HE, X.; Wang, K.; Yang, H. Research progress in uptake and metabolism of foliar urea in plants. Plant Sci. J. 2023, 41, 552–562. [Google Scholar] [CrossRef]
- Liu, Y.; Li, L.; Liu, Y.; He, X.; Song, J.; Zeng, A.; Wang, Z. Assessment of Spray Deposition and Losses in an Apple Orchard with an Unmanned Agricultural Aircraft System in China. Trans. ASABE 2020, 63, 619–627. [Google Scholar] [CrossRef]
- Zhu, H.; Salyani, M.; Fox, R.D. A portable scanning system for evaluation of spray deposit distribution. Comput. Electron. Agric. 2011, 76, 38–43. [Google Scholar] [CrossRef]
- Smith, D.B. Uniformity and Recovery of Broadcast Sprays Using Fan Nozzles. Trans. ASAE 1992, 35, 39–44. [Google Scholar] [CrossRef]
- He, Y.; Wu, J.; Fang, H.; Zheng, Q.; Xiao, S. Research on deposition effect of droplets based on plant protection unmanned aerial vehicle: A review. J. Zhejiang Univ. 2018, 44, 392–398. [Google Scholar] [CrossRef]
- Yuan, H.; Wang, G. Effects of droplet size and deposition density on field efficacy of pesticides. Plant Prot. 2015, 41, 9–16. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technical Parameter | KES | Four-Rotor UAV |
|---|---|---|
| Nozzle type | cone nozzle | SX11001VS |
| Spraying angle | 60° | 110° |
| Number of nozzles | 1 | 4 |
| Tank capacity (L) | 20 | 10 |
| Spraying width (m) | 1 | 3 |
| Maximum flow rate (L/min) | 1.2 | 1.8 |
| Treatment | Wind Speed (m/s) | Wind Direction | Temperature (°C) | Humidity (%) | |
|---|---|---|---|---|---|
| Vertical shoot position (VSP) trellis system | USO a | 1.8 | E | 35.4 | 42.8 |
| UST b | 1.5 | E | 34.1 | 43.7 | |
| MS c | 0.9 | SE | 34.6 | 42.9 | |
| Y-shaped trellis system | USO | 1.8 | E | 32.8 | 51.9 |
| UST | 1.7 | SE | 33.4 | 55.9 | |
| MS | 1.8 | SE | 34.9 | 53.3 | |
| Factors | Test Indicators | DF a | F b | p c | Significance d |
|---|---|---|---|---|---|
| Spraying method e | Droplet average diameter (mm) | 2 | 26.793 | 0.000 | *** |
| Droplets area percentage (%) | 2 | 93.214 | 0.000 | *** | |
| Droplet density (droplets cm−2) | 2 | 94.511 | 0.000 | *** | |
| Leaf surface position f | Droplet average diameter (mm) | 1 | 6.068 | 0.015 | * |
| Droplets area percentage (%) | 1 | 75.743 | 0.000 | *** | |
| Droplet density (droplets cm−2) | 1 | 15.192 | 0.000 | *** | |
| Canopy height g | Droplet average diameter (mm) | 2 | 0.904 | 0.407 | ns |
| Droplets area percentage (%) | 2 | 3.718 | 0.027 | * | |
| Droplet density (droplets cm−2) | 2 | 1.910 | 0.152 | ns |
| Source | Test Indicators | DF a | F b | p c | Significance d |
|---|---|---|---|---|---|
| Spraying method e * Leaf surface position f | Droplet average diameter (mm) | 2 | 5.938 | 0.003 | ** |
| Droplets area percentage (%) | 2 | 13.025 | 0.000 | *** | |
| Droplet density (droplets cm−2) | 2 | 10.756 | 0.000 | *** | |
| Spraying method * Canopy height g | Droplet average diameter (mm) | 4 | 0.979 | 0.422 | ns |
| Droplets area percentage (%) | 4 | 3.480 | 0.010 | ** | |
| Droplet density (droplets cm−2) | 4 | 2.093 | 0.086 | ns | |
| Leaf surface position * Canopy height | Droplet average diameter (mm) | 2 | 0.148 | 0.862 | ns |
| Droplets area percentage (%) | 2 | 1.718 | 0.184 | ns | |
| Droplet density (droplets cm−2) | 2 | 2.318 | 0.103 | ns | |
| Spraying method * Canopy height * Leaf surface position | Droplet average diameter (mm) | 4 | 0.136 | 0.969 | ns |
| Droplets area percentage (%) | 4 | 0.302 | 0.876 | ns | |
| Droplet density (droplets cm−2) | 4 | 1.445 | 0.223 | ns |
| Treatments | Uniformity (%) | Penetrability (%) | ||||||
|---|---|---|---|---|---|---|---|---|
| Upper Canopy | Middle Canopy | Lower Canopy | ||||||
| Adaxial Side | Abaxial Side | Adaxial Side | Abaxial Side | Adaxial Side | Abaxial Side | Adaxial Side | Abaxial Side | |
| USO a | 49.52 | 45.09 | 35.64 | 56.38 | 40.72 | 32.67 | 45.61 | 52.32 |
| UST b | 59.25 | 50.49 | 39.16 | 37.81 | 20.64 | 25.83 | 40.72 | 40.75 |
| MS c | 219.00 | 59.56 | 171.88 | 94.30 | 169.12 | 83.08 | 228.82 | 83.57 |
| Source | Test Indicators | DF a | F b | p c | Significance d |
|---|---|---|---|---|---|
| Spraying method e | Droplet average diameter (mm) | 2 | 8.288 | 0 | *** |
| Droplets area percentage (%) | 2 | 16.49 | 0 | *** | |
| Droplet density (droplets cm−2) | 2 | 51.744 | 0 | *** | |
| Leaf surface position f | Droplet average diameter (mm) | 1 | 6.974 | 0.009 | ** |
| Droplets area percentage (%) | 1 | 78.956 | 0 | *** | |
| Droplet density (droplets cm−2) | 1 | 2.925 | 0.09 | ns | |
| Canopy height g | Droplet average diameter (mm) | 2 | 0.265 | 0.767 | ns |
| Droplets area percentage (%) | 2 | 7.244 | 0.001 | *** | |
| Droplet density (droplets cm−2) | 2 | 0.333 | 0.717 | ns |
| Source | Test Indicators | DF a | F b | p c | Significance d |
|---|---|---|---|---|---|
| Spraying method e * Leaf surface position f | Droplet average diameter (mm) | 2 | 6.575 | 0.002 | ** |
| Droplets area percentage (%) | 2 | 4.7 | 0.011 | * | |
| Droplet density (droplets cm−2) | 2 | 5.633 | 0.005 | ** | |
| Spraying method * Canopy height g | Droplet average diameter (mm) | 4 | 0.293 | 0.882 | ns |
| Droplets area percentage (%) | 4 | 1.169 | 0.328 | ns | |
| Droplet density (droplets cm−2) | 4 | 0.263 | 0.901 | ns | |
| Leaf surface position * Canopy height | Droplet average diameter (mm) | 2 | 0.182 | 0.834 | ns |
| Droplets area percentage (%) | 2 | 0.502 | 0.606 | ns | |
| Droplet density (droplets cm−2) | 2 | 2.802 | 0.064 | ns | |
| Spraying method * Canopy height * Leaf surface position | Droplet average diameter (mm) | 4 | 0.238 | 0.917 | ns |
| Droplets area percentage (%) | 4 | 0.193 | 0.942 | ns | |
| Droplet density (droplets cm−2) | 4 | 1.179 | 0.323 | ns |
| Spraying Method | Uniformity (%) | Penetrability (%) | ||||||
|---|---|---|---|---|---|---|---|---|
| Upper Canopy | Middle Canopy | Lower Canopy | ||||||
| Adaxial Side | Abaxial Side | Adaxial Side | Abaxial Side | Adaxial Side | Abaxial Side | Adaxial Side | Abaxial Side | |
| USO a | 51.78 | 25.13 | 53.39 | 39.89 | 38.50 | 33.69 | 46.35 | 34.73 |
| UST b | 54.56 | 36.84 | 53.42 | 38.70 | 38.51 | 34.13 | 49.50 | 36.69 |
| MS c | 141.47 | 75.58 | 87.52 | 94.76 | 126.98 | 85.99 | 122.69 | 82.46 |
| Manual Spraying (MS) | UAV Spraying Once (USO) | UAV Spraying Twice (UST) | |
|---|---|---|---|
| Efficiency indexes | |||
| Flow rate (L/min) | 1.2 | 1.8 | 1.8 |
| Effective spraying time per hectare (h/ha) | 7.01 | 1.14 | 2.28 |
| Additional time per hectare (h/ha) | 1.86 | 0.82 | 1.64 |
| Total operation time per hectare (h/ha) | 8.87 | 1.96 | 3.92 |
| Working area per unit time (ha/h) | 0.14 | 0.88 | 0.44 |
| Spray volume per hectare (L/ha) | 504.72 | 123.12 | 246.24 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Le, Z.; Gutiérrez-Gamboa, G.; Dong, M.; Zheng, W.; Sun, B. Spraying Effects of UAV Application on Droplet Effectiveness in Two Vine Trellis Systems of High-Slope Terrace Vineyards. Plants 2025, 14, 1452. https://doi.org/10.3390/plants14101452
Le Z, Gutiérrez-Gamboa G, Dong M, Zheng W, Sun B. Spraying Effects of UAV Application on Droplet Effectiveness in Two Vine Trellis Systems of High-Slope Terrace Vineyards. Plants. 2025; 14(10):1452. https://doi.org/10.3390/plants14101452
Chicago/Turabian StyleLe, Zhao, Gastón Gutiérrez-Gamboa, Mengde Dong, Wei Zheng, and Baoshan Sun. 2025. "Spraying Effects of UAV Application on Droplet Effectiveness in Two Vine Trellis Systems of High-Slope Terrace Vineyards" Plants 14, no. 10: 1452. https://doi.org/10.3390/plants14101452
APA StyleLe, Z., Gutiérrez-Gamboa, G., Dong, M., Zheng, W., & Sun, B. (2025). Spraying Effects of UAV Application on Droplet Effectiveness in Two Vine Trellis Systems of High-Slope Terrace Vineyards. Plants, 14(10), 1452. https://doi.org/10.3390/plants14101452