Village-Level Homestead and Building Floor Area Estimates Based on UAV Imagery and U-Net Algorithm

Abstract
1. Introduction
2. Data and Methods
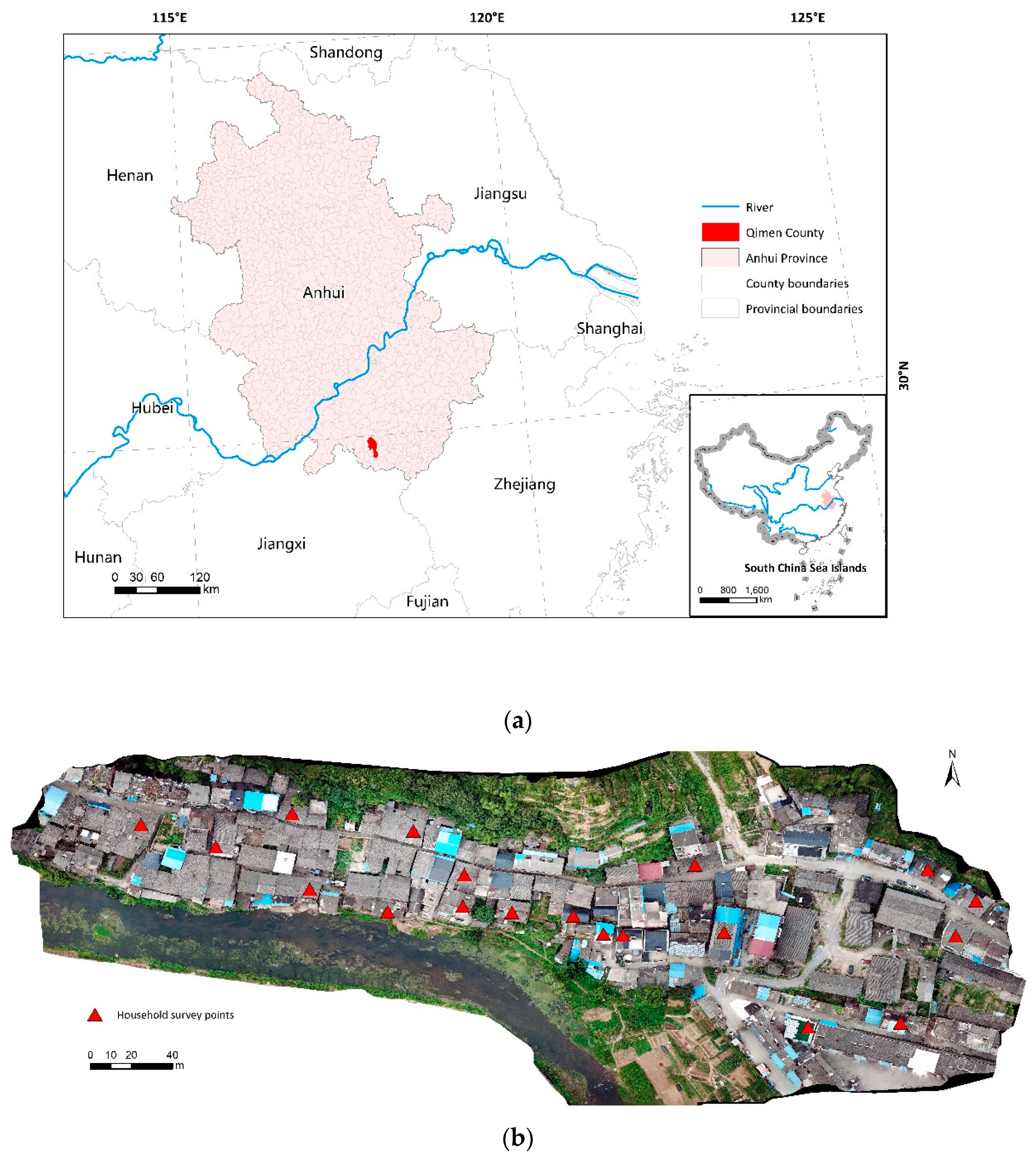
2.1. Study Area
2.2. Image Acquisition Using UAV Data
2.3. Estimation of Rural Homestead Area Using the U-Net Algorithm
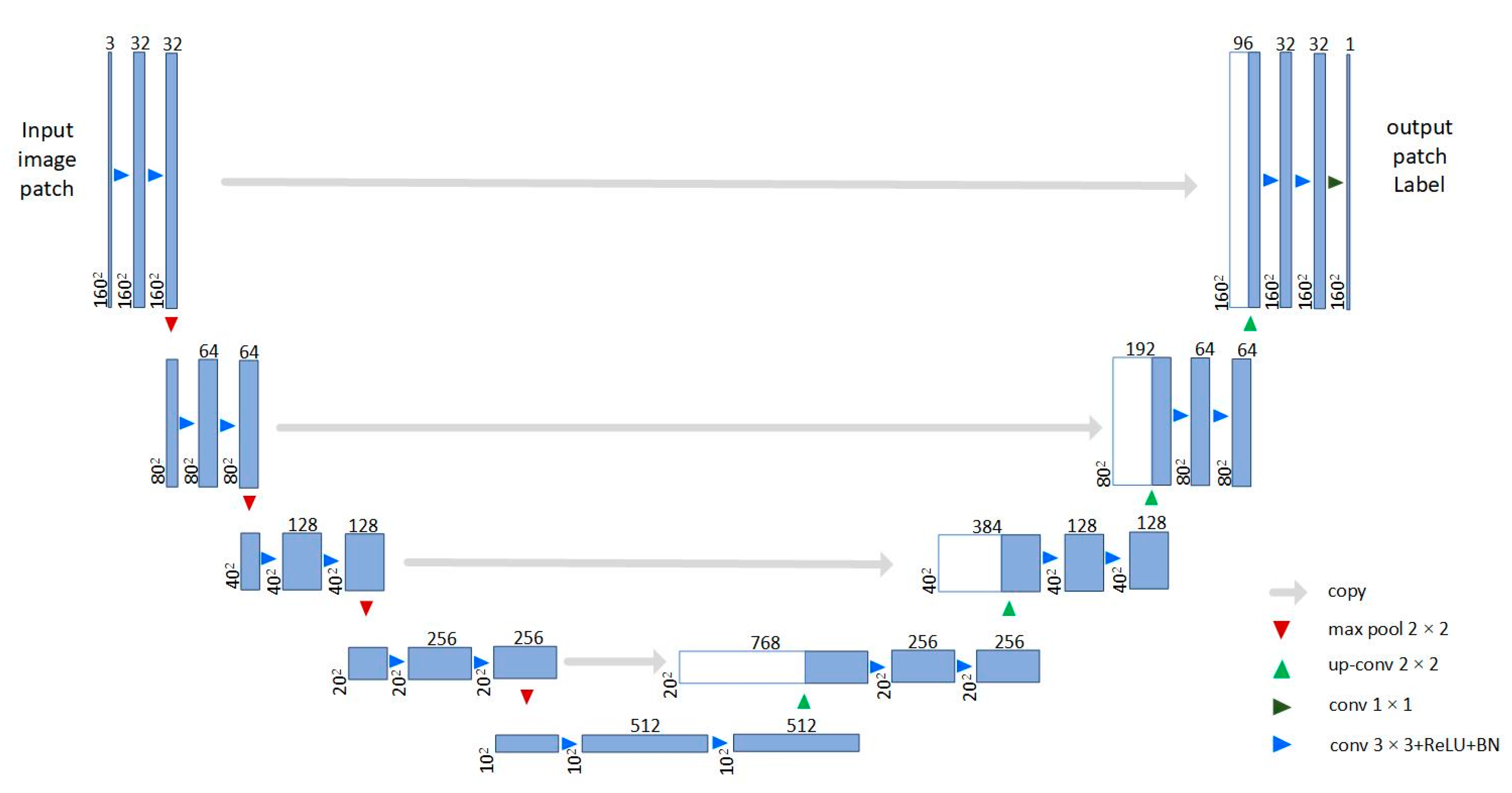
2.3.1. U-Net Architecture and Parameter Settings
2.3.2. Training
2.3.3. Validation
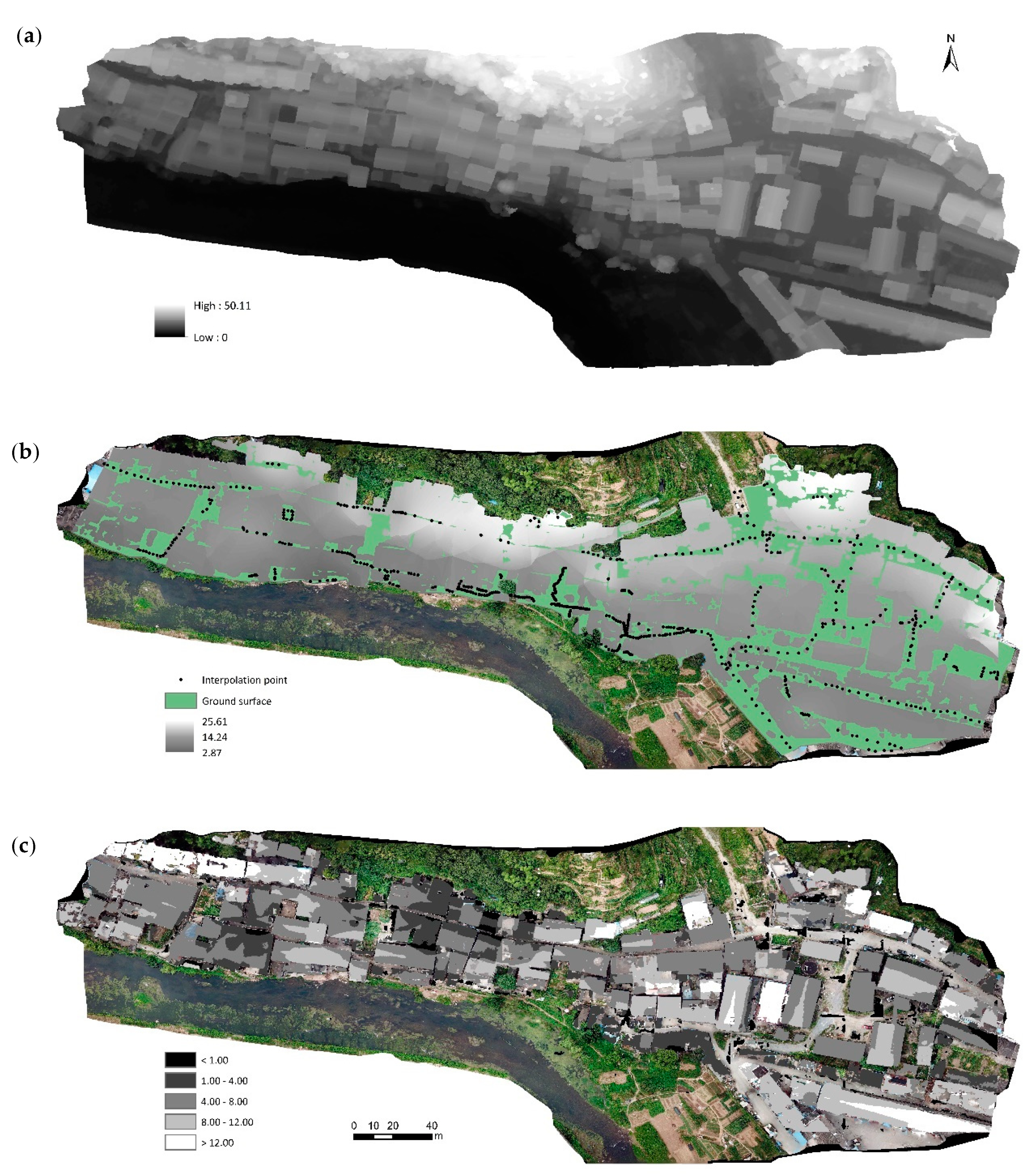
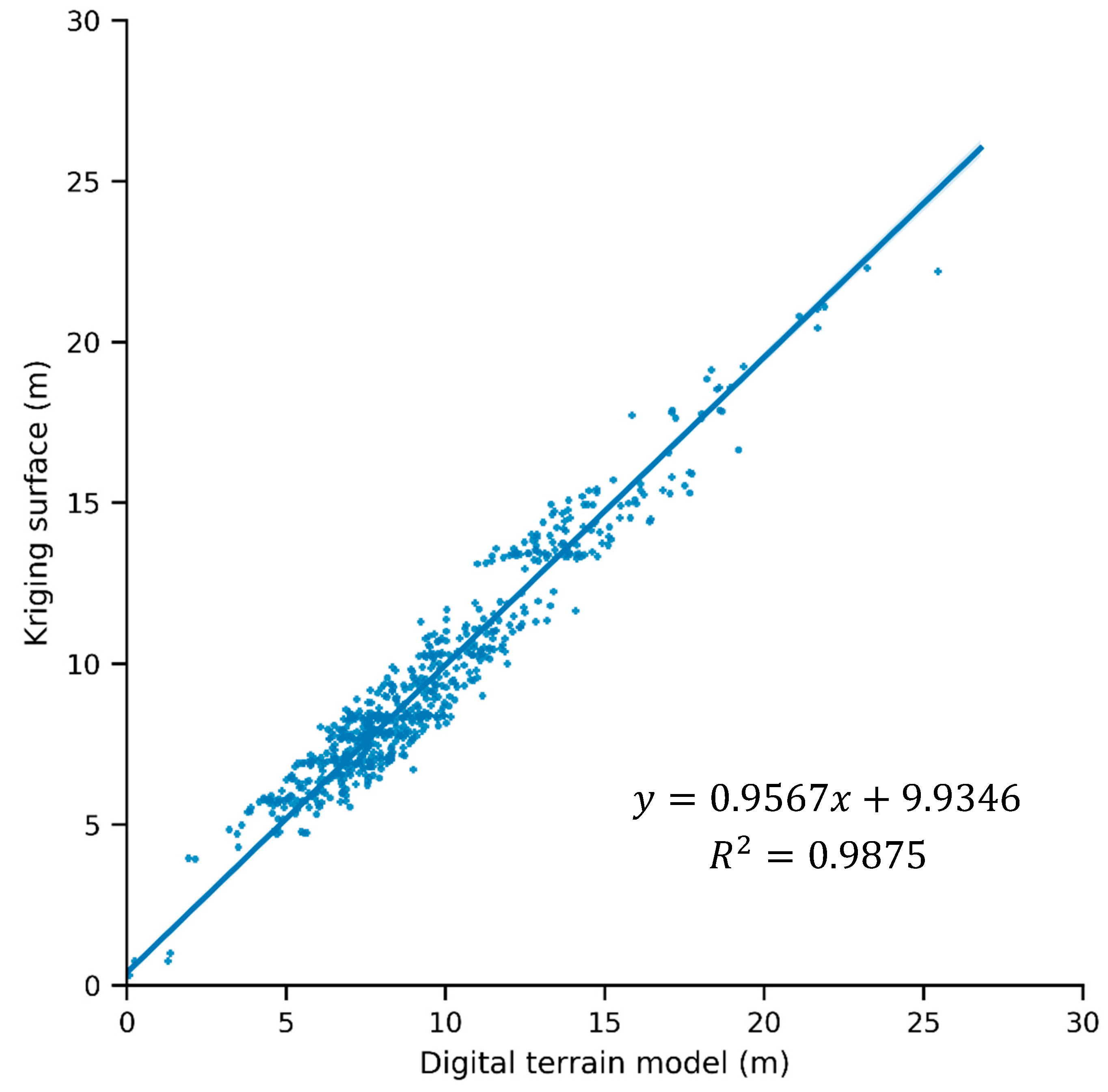
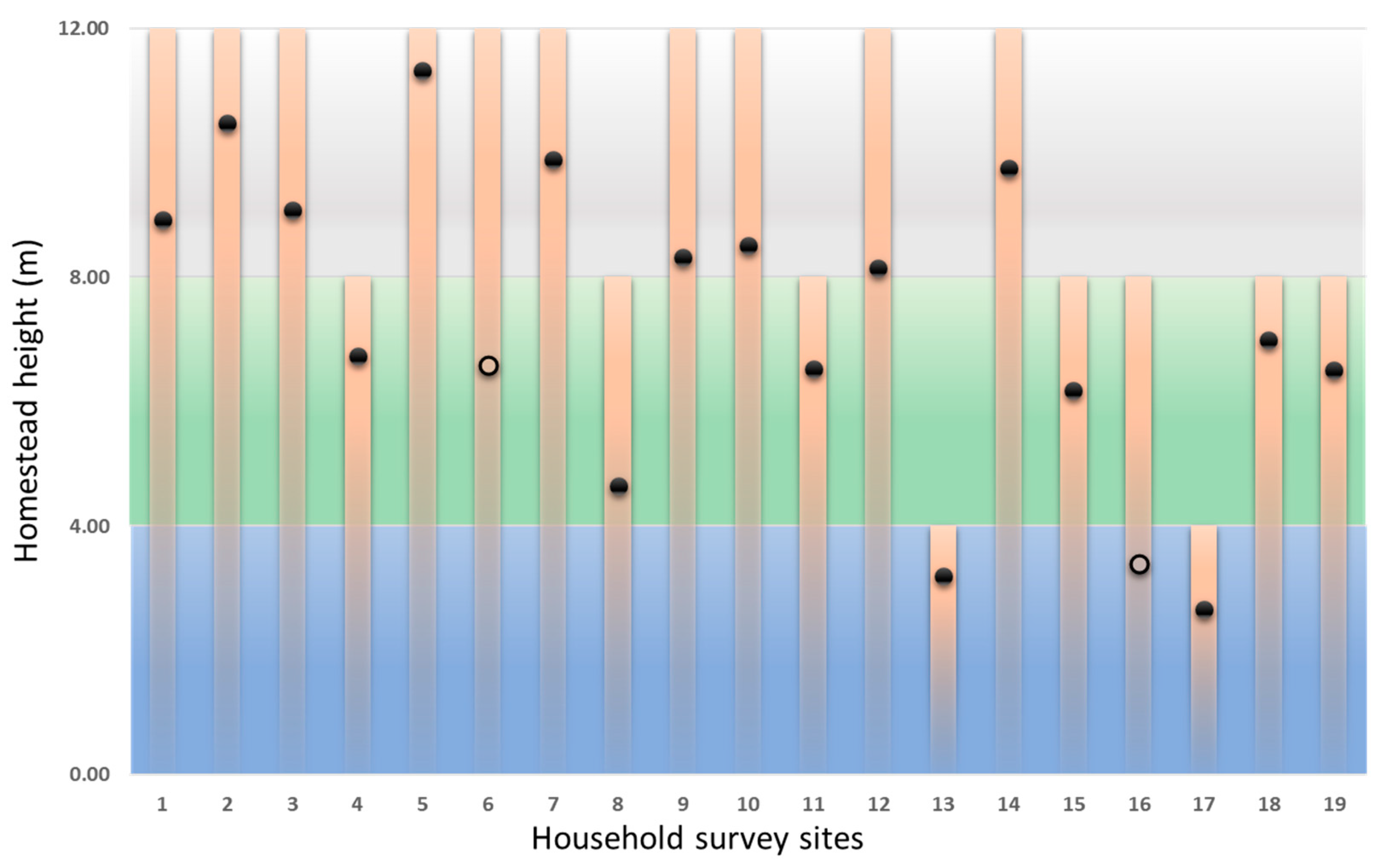
2.4. Generation of Building Height Model and Estimation of Homestead Floor Area
3. Results
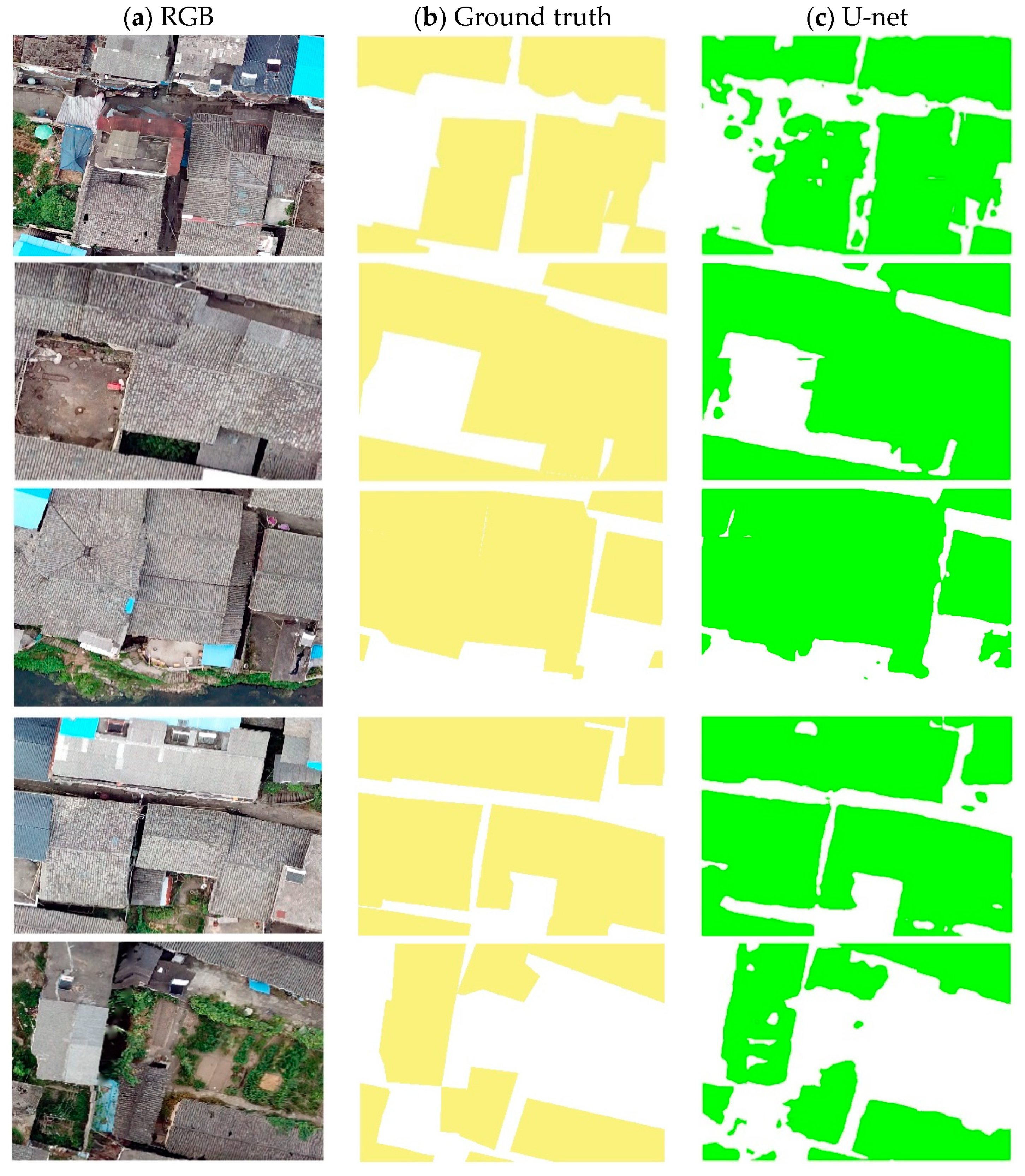
3.1. Homestead Recognition Based on U-Net Algorithm
3.2. Floor Estimates for Rural Buildings Based on UAV DTM
3.3. Estimated Floor Area at the Village Level
4. Discussion
5. Conclusions
Funding
Conflicts of Interest
References
- Liu, S.Y.; Xiong, X.F. Property rights and regulation: Evolution and reform of China’s homestead system. China Econ. Stud. 2019, 6, 17–27. [Google Scholar]
- Long, H.L.; Li, Y.R.; Liu, Y.S.; Woods, M.; Zou, J. Accelerated restructuring in rural China fueled by increasing vs. decreasing balance land-use policy for dealing with hollowed villages. Land Use Policy 2012, 29, 11–22. [Google Scholar] [CrossRef]
- Liu, Y.S.; Fang, F.; Li, Y.H. Key issues of land use in China and implications for policy making. Land Use Policy 2014, 40, 6–12. [Google Scholar] [CrossRef]
- Chen, H.X.; Zhao, L.M.; Zhao, Z.Y. Influencing factors of farmers’ willingness to withdraw from rural homesteads: A survey in Zhejiang, China. Land Use Policy 2017, 68, 524–530. [Google Scholar] [CrossRef]
- Tian, Y.; Kong, X.; Liu, Y.; Wang, H. Restructuring rural settlements based on an analysis of inter-village social connections: A case in Hubei Province, Central China. Habitat Int. 2016, 57, 121–131. [Google Scholar] [CrossRef]
- Cao, Q.; Sarker, M.N.I.; Sun, J.Y. Model of the influencing factors of the withdrawal from rural homesteads in China: Application of Grounded theory method. Land Use Policy 2019, 85, 285–289. [Google Scholar] [CrossRef]
- Xu, H.; Liu, Y. Policy implications and impact of household registration system on peasants’ willingness to return rural residential lands: Evidence from household survey in rural China. Panoeconomicus 2016, 63, 135–146. [Google Scholar]
- Watmough, G.R.; Marcinko, C.L.J.; Sullivan, C.; Tschirhart, K.; Mutuo, P.K. Socioecological informed use of remote sensing data to predict rural household poverty. Proc. Natl. Acad. Sci. USA 2019, 116, 1213–1218. [Google Scholar] [CrossRef]
- Sun, L.; Perter, H. Formalizing informal homes, a bad idea: The credibility thesis applied to China’s “extra-legal” housing. Land Use Policy 2018, 79, 891–901. [Google Scholar] [CrossRef]
- Puliti, S.; Ene, L.T.; Gobakken, T.; Næsset, E. Use of partial-coverage UAV data in sampling for large scale forest inventories. Remote Sens. Environ. 2017, 194, 115–126. [Google Scholar] [CrossRef]
- Deng, F.; Dou, A.X.; Wu, W.Y.; Chen, Z.H.; Yuan, X.X. Rapid Investigation of disaster situation in extreme disaster area of Jiuzhaigou earthquake in Sichuan based on UAV remote sensing. J. Catastrophology 2018, 33, 210–215. [Google Scholar]
- Yang, C.; Li, H.; Xu, G.; Xiang, X.; Yang, D. A measure to the building density and floor area ratio of rural settlements based on Da Jiang unmanned aerial vehicle remote sensing. Mt. Res. 2019, 37, 144–150. [Google Scholar]
- Li, X.C.; Zhou, Y.Y.; Gong, P.; Seto, K.C.; Clinton, N. Developing a method to estimate building height from Sentinel-1 data. Remote Sens. Environ. 2020, 240, 111705. [Google Scholar] [CrossRef]
- Wang, J.Z.; Lin, Z.J.; Li, C.M.; Hong, Z.G. 3D reconstruction of buildings with single UAV image. Remote Sens. Inf. 2004, 4, 11–15. [Google Scholar]
- Ren, Y.Y.; Zhang, X.F.; Ma, Y.J.; Yang, Q.Y.; Wang, C.J.; Dai, J.G.; Zhao, Q.Z. Target detection of Rural Buildings in UAV remote sensing images based on convolutional neural network. J. Nanjing Norm. Univ. (Eng. Technol. Ed.) 2019, 19, 29–36. [Google Scholar]
- Li, Z.; Li, Y.S.; Wu, X.; Liu, G.; Lu, H.; Tang, M. Hollow village building detection method using high resolution remote sensing image based on CNN. Trans. Chin. Soc. Agric. Mach. 2017, 48, 160–165. [Google Scholar]
- Protopapadakis, E.; Voulodimos, A.; Doulamis, A.; Doulamis, N.; Stathaki, T. Automatic crack detection for tunnel inspection using deep learning and heuristic image post-processing. Appl. Intell. 2019, 49, 2793–2806. [Google Scholar] [CrossRef]
- Viola, P.; Jones, M. Rapid object detection using a boosted cascade of simple features. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, CVPR 2001, Kauai, HI, USA, 8–14 December 2001; p. I. [Google Scholar]
- Liu, Z.Q.; Cao, Y.W.; Wang, Y.Z.; Wang, W. Computer vision-based concrete crack detection using U-net fully convolutional network. Autom. Constr. 2019, 104, 129–139. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention—MICCAI 2015, Munich, Germany, 5–9 October 2015; Navab, N., Hornegger, J., Wells, W.M., Frangi, A.F., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Papadomanolaki, M.; Vakalopoulou, M.; Karantzalos, K. A novel object-based deep learning framework for semantic segmentation of very high-resolution remote sensing data comparison with convolutional and fully convolutional networks. Remote Sens. 2019, 11, 684. [Google Scholar] [CrossRef]
- Rahman, M.; Hassan, M.R.; Buyya, R. Jaccard index based availability prediction in enterprise grids. Procedia Comput. Sci. 2012, 1, 2707–2716. [Google Scholar] [CrossRef]
- Fawcett, T. An introduction to ROC analysis. Pattern Recognit. Lett. 2006, 27, 861–874. [Google Scholar] [CrossRef]
- Moon, W.K.; Lee, Y.-W.; Ke, H.-H.; Lee, S.H.; Huang, C.-S.; Chang, R.-F. Computer-aided diagnosis of breast ultrasound images using ensemble learning from convolutional neural networks. Comput. Methods Programs Biomed. 2020, 190, 105361. [Google Scholar] [CrossRef] [PubMed]
- Wallance, L.; Lucieer, A.; Malenovsky, Z.; Truner, D.; Vopenka, P. Assessment of forest structure using two UAV techniques: A comparison of airborne laser scanning and structure from motion (SfM) point clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- González-Jaramillo, V.; Fries, A.; Bendix, J. AGB estimation in a tropical mountain forest (TMF) by means of RGB and multispectral images using an unmanned aerial vehicle (UAV). Remote Sens. 2019, 11, 1413. [Google Scholar] [CrossRef]
- Agisoft. Agisoft Photoscan UserManual; Agisoft LLC: St. Petersburg, Russia, 2014; Available online: http://www.agisoft.com/downloads/user-manuals (accessed on 10 April 2020).
- Torres-sánchez, J.; Castro, A.I.; Peňa, J.M.; Jiménez-Brenes, F.M.; Arquero, O.; Lovera, M.; López-Granados, F. Mapping the 3D structure of almond trees using UAV acquired photogrammetric point clouds and object-based image analysis. Biosyst. Eng. 2018, 176, 172–184. [Google Scholar]
- Konstantinidis, D.; Argyriou, V.; Stathaki, T.; Grammalidis, N. A modular CNN-based building detector for remote sensing images. Comput. Netw. 2019, 168, 107034. [Google Scholar] [CrossRef]
- Weidner, U.; Förstner, W. Towards automatic building extraction from high-resolution digital elevation models. ISPRS J. Photogramm. Remote Sens. 1995, 50, 38–49. [Google Scholar] [CrossRef]
- Wimala, V.I.; Menno, S.; Elisabeth, A.; Hans, M. Monitoring height and greenness of non-woody floodplain vegetation with UAV time series. ISPRS J. Photogram. Remote Sens. 2018, 141, 112–123. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Indicators | Precision | Recall | F1 | Overall Accuracy | IoU | TP | FP | TN | FN |
|---|---|---|---|---|---|---|---|---|---|
| U-net | 0.91 | 0.86 | 0.88 | 0.92 | 0.80 | 21,638,559 | 2,046,555 | 40,908,779 | 3,530,350 |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X. Village-Level Homestead and Building Floor Area Estimates Based on UAV Imagery and U-Net Algorithm. ISPRS Int. J. Geo-Inf. 2020, 9, 403. https://doi.org/10.3390/ijgi9060403
Zhang X. Village-Level Homestead and Building Floor Area Estimates Based on UAV Imagery and U-Net Algorithm. ISPRS International Journal of Geo-Information. 2020; 9(6):403. https://doi.org/10.3390/ijgi9060403
Chicago/Turabian StyleZhang, Xueyan. 2020. "Village-Level Homestead and Building Floor Area Estimates Based on UAV Imagery and U-Net Algorithm" ISPRS International Journal of Geo-Information 9, no. 6: 403. https://doi.org/10.3390/ijgi9060403
APA StyleZhang, X. (2020). Village-Level Homestead and Building Floor Area Estimates Based on UAV Imagery and U-Net Algorithm. ISPRS International Journal of Geo-Information, 9(6), 403. https://doi.org/10.3390/ijgi9060403