Accurate and Efficient Calculation of Three-Dimensional Cost Distance


Abstract
1. Introduction
2. Challenges in Moving from 2D to 3D Cost Distance
2.1. Representation of 3D Friction
2.2. Accurate Cost Distance
2.3. Computational Efficiency
3. Calculation of 3D Cost Distance
3.1. Construction of Network Model
3.2. Calculation of Accurate 3D Cost Distance
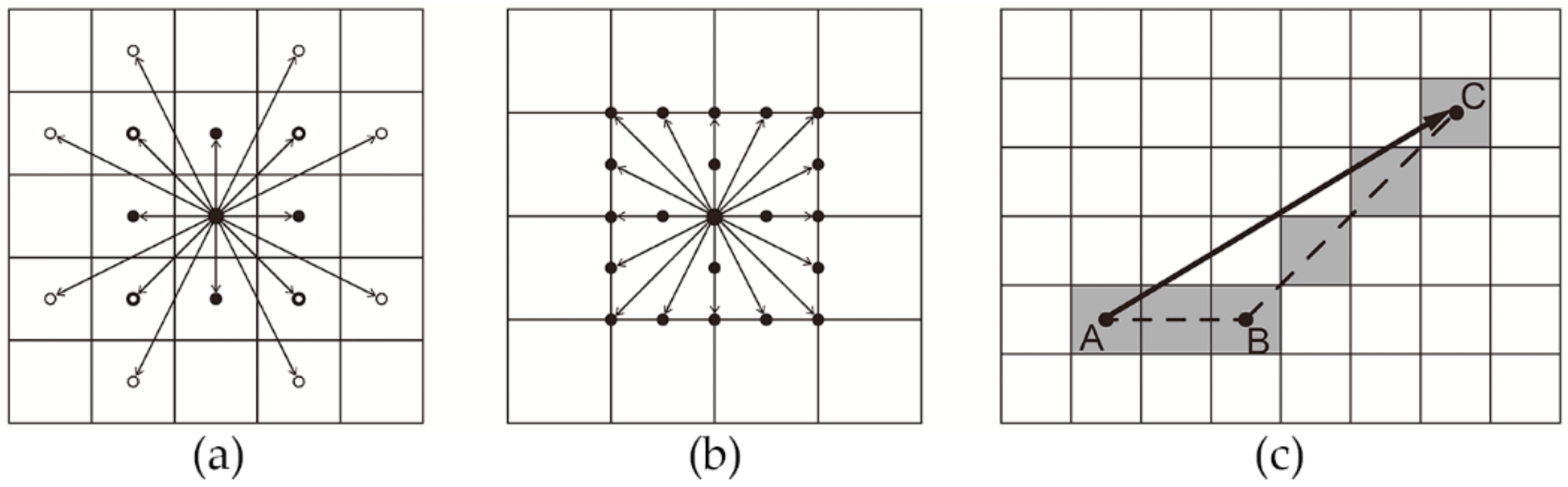
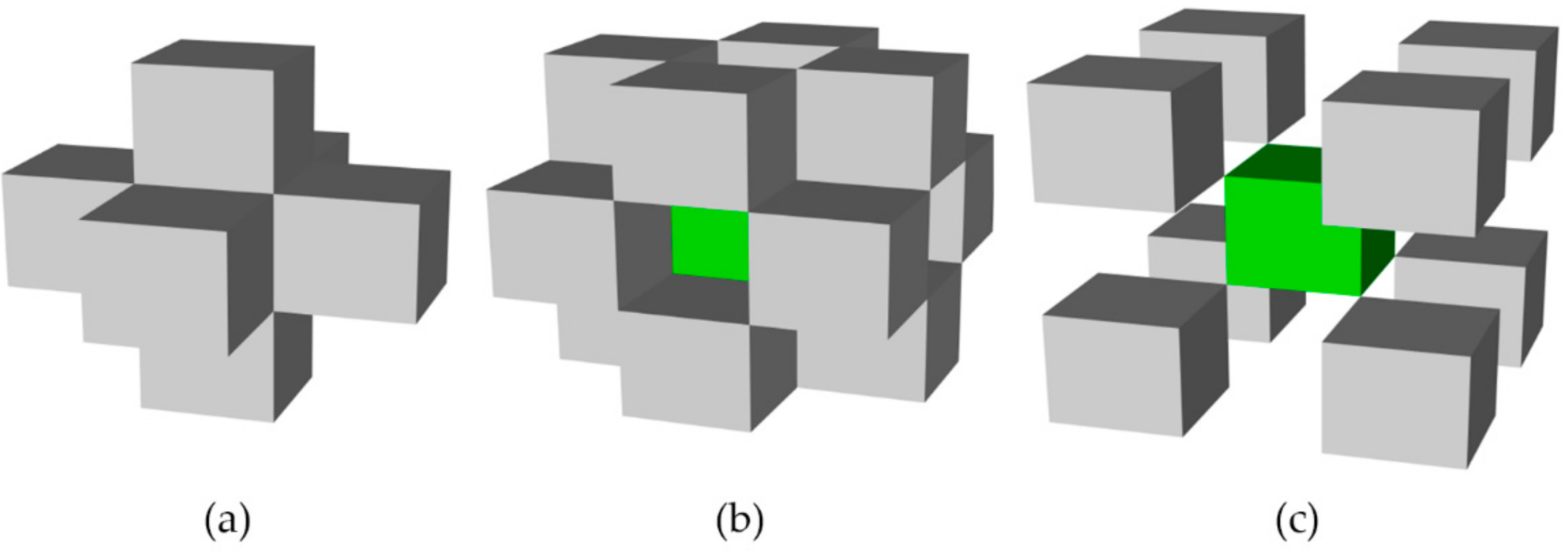
- Deflections along the propagation path caused by the change in friction can be retained. Specifically, when propagating through the active voxel A to its neighbor voxel N, whether voxel A and N have different friction (Figure 4a) or the propagation from the source voxel S of the active voxel is blocked by any voxel with different friction (Figure 4b), the propagation path deviates from its original direction at active voxel similar to the situation when a wave passes into a medium of different density (refraction occurs) or is blocked by an obstacle, and we record the active voxel A as the source of its neighbor voxel N. The least accumulative cost at voxel N can be calculated according to Equation (3), where is the least accumulative cost at voxel A, and is the incremental cost from A to N.
- The propagation path in the homogeneous frictions should be straight. Specifically, if none of the cases in the first rule are true, the propagation occurs in a homogeneous friction. We record the source voxel S of the active voxel as the source of neighbor voxel N. The least accumulative cost at the neighbor voxel can be expressed as follows:where is the friction of voxel N, and DSN is the distance between voxel S and N, which can be calculated by the row, column, and layer number of voxel S and N in the voxter according to the Equation (5).
| Algorithm 1 Pseudocode of Calculating 3D Cost Distance |
| Input: InitialSource, Friction |
| Output: CostDistance, DirectSource |
| 1: procedure Initialize() |
| 2: for each voxel v do |
| 3: CostDistance(v) ← ∞ |
| 4: DirectSource(v) ← v |
| 5: end for |
| 6: L ← [] |
| 7: for all initial voxels s do |
| 8: L.Insert(s) |
| 9: CostDistance(s) ← 0 |
| 10: end for |
| 11: end procedure |
| 12: |
| 13: function IsBlocked(s, t) //return True if the travel path from voxel s to t is blocked |
| 14: for each voxel v intersects with the line segment connecting voxels s and t do |
| 15: if any Friction(v) ≠ Friction(t) then |
| 16: return True |
| 17: end if |
| 18: end for |
| 19: return False |
| 20: end function |
| 21: |
| 22: procedure DecreaseKey(L, n’, n) //decrease the key of voxel n in the list L |
| 23: if n’.costdistance > n.costdistance then |
| 24: L.Remove(n’) |
| 25: L.Insert(n) |
| 26: end if |
| 27: end procedure |
| 28: |
| 29: procedure Main() |
| 30: Initialize() |
| 31: while L ≠ empty do |
| 32: m ← L.ExtractMin() |
| 33: CostDistance(m) ← m.costdistance |
| 34: DirectSource(m) ← m.directsource |
| 35: for each adjacent voxel n of m do |
| 36: if Firction(n) ≠ Friction(m) or IsBlocked(m.directsource, n) then |
| 37: n.directsource ← m |
| 38: calculate n.costdistance based on Equations (1)–(3) |
| 39: else |
| 40: n.directsource ← m.directsource |
| 41: calculate n.costdistance based on Equations (4)–(5) |
| 42: end if |
| 43: n’ ← L.Find(n) //n’: the existing voxel of n in the list L |
| 44: if n’ = null and CostDistance(n) = ∞ then |
| 45: L.Insert(n) |
| 46: else if n’ ≠ null then |
| 47: DecreaseKey(L, n’, n) |
| 48: end if |
| 49: end for |
| 50: end while |
| 51: end procedure |
3.3. Efficient Data Structures
4. Experiments to Demonstrate the Capability of the Proposed Algorithm
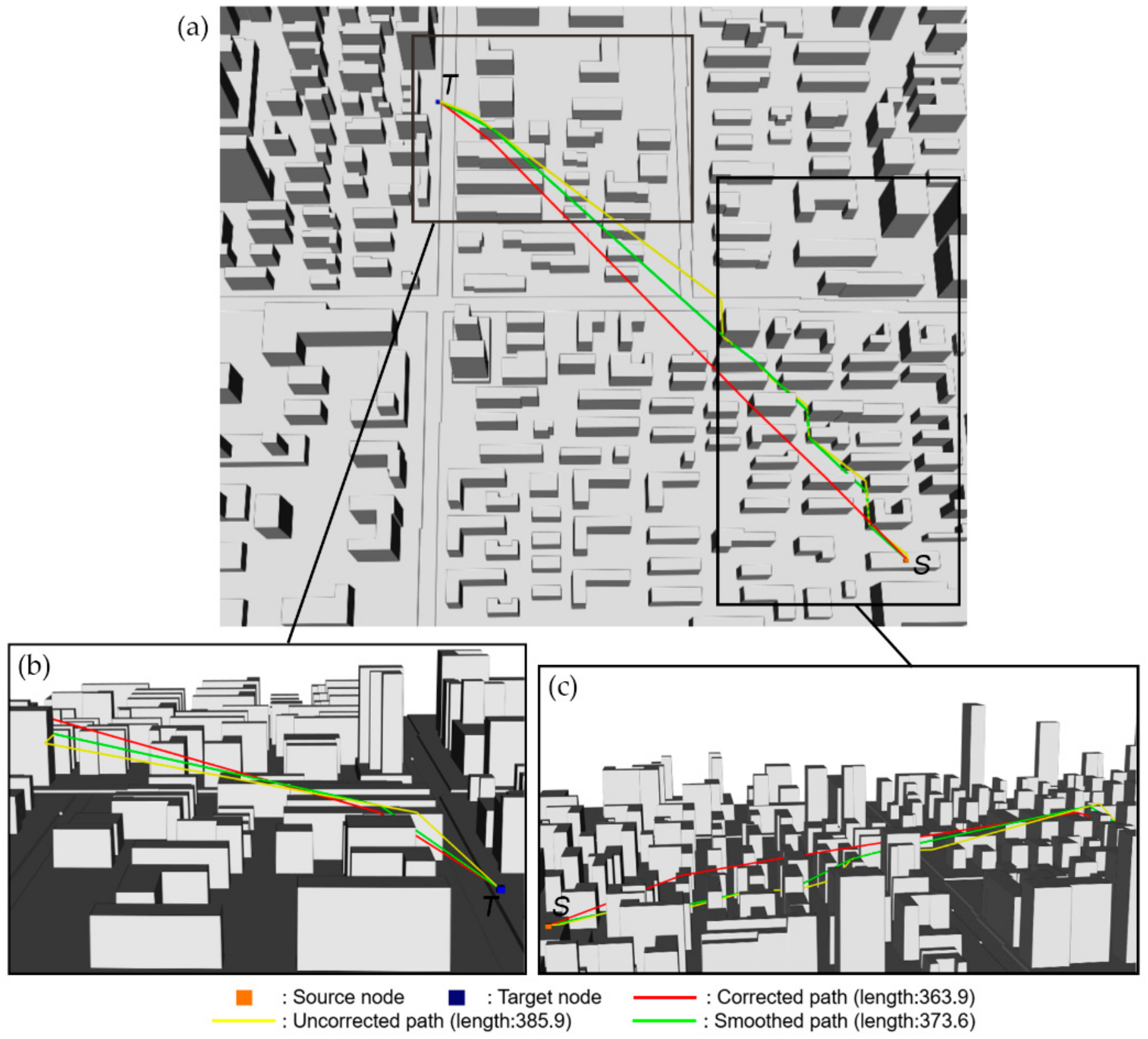
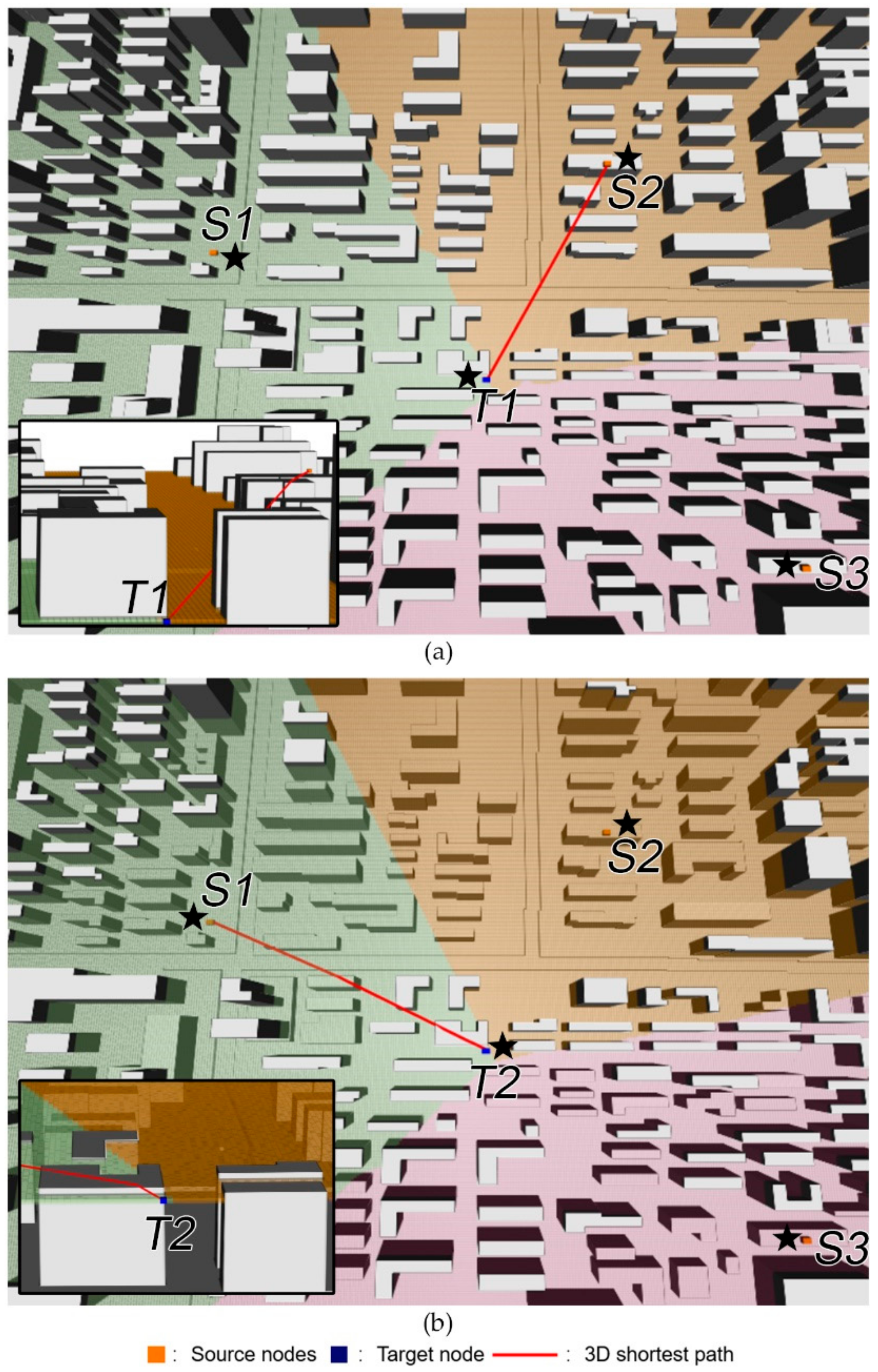
4.1. Delivery Path Planning for Drone
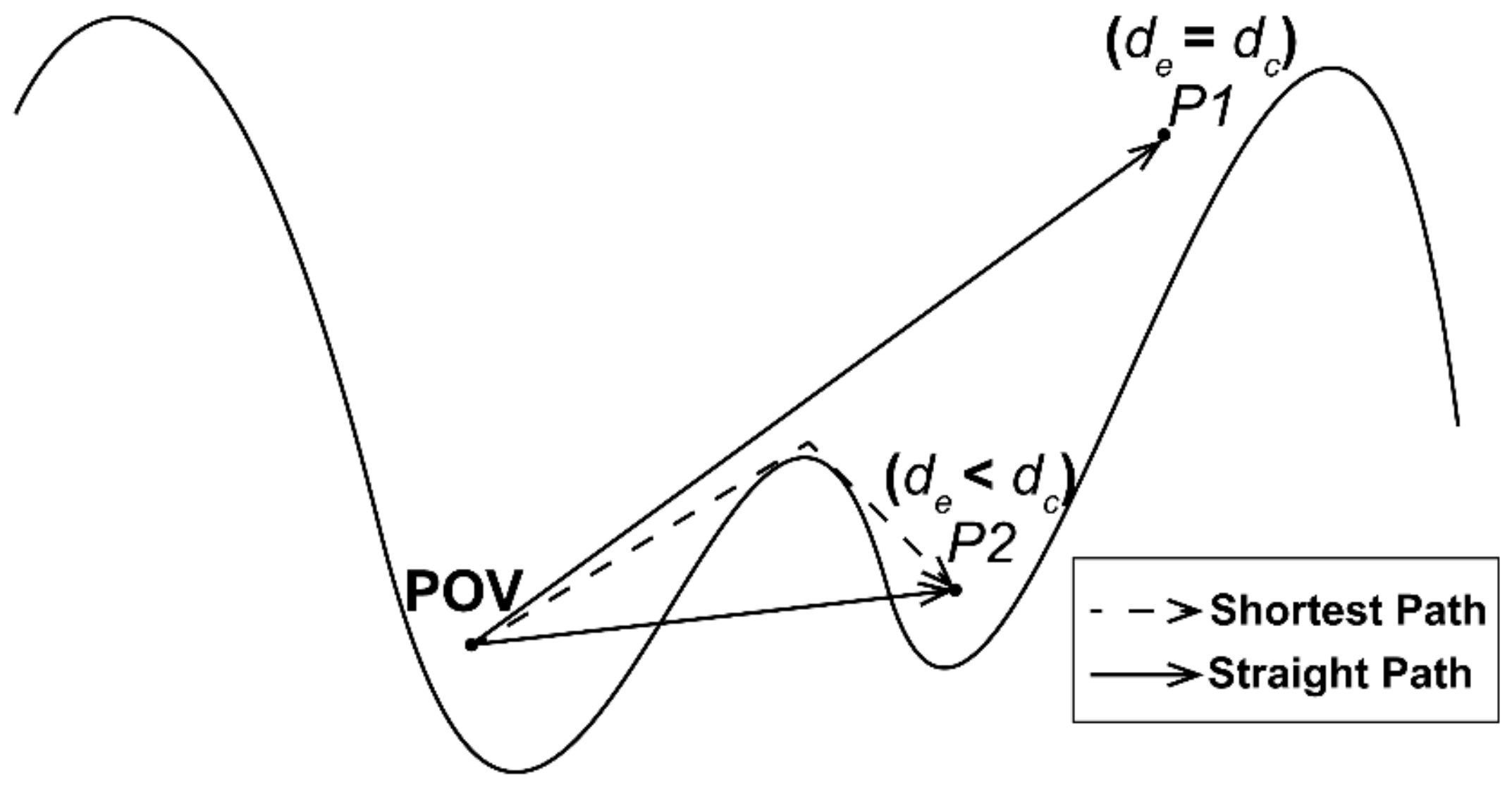
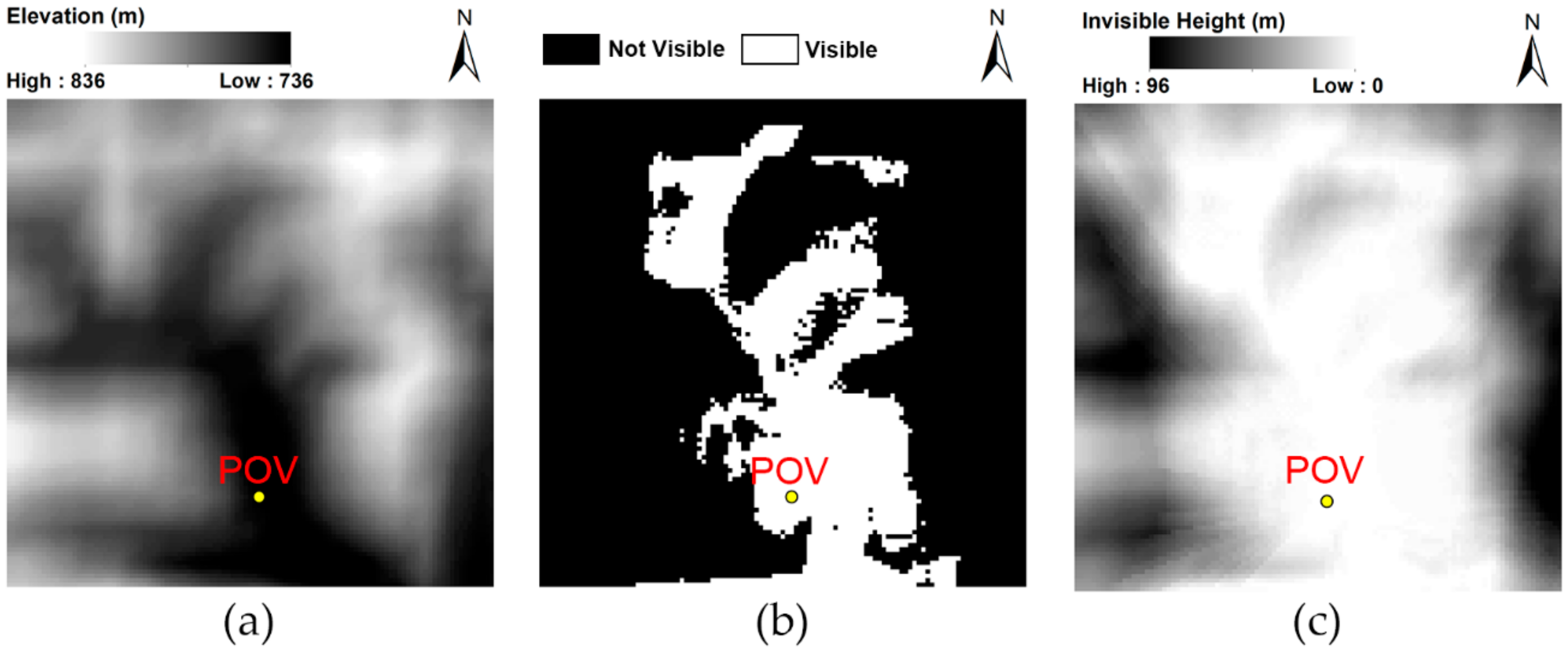
4.2. Calculation of 3D Viewshed
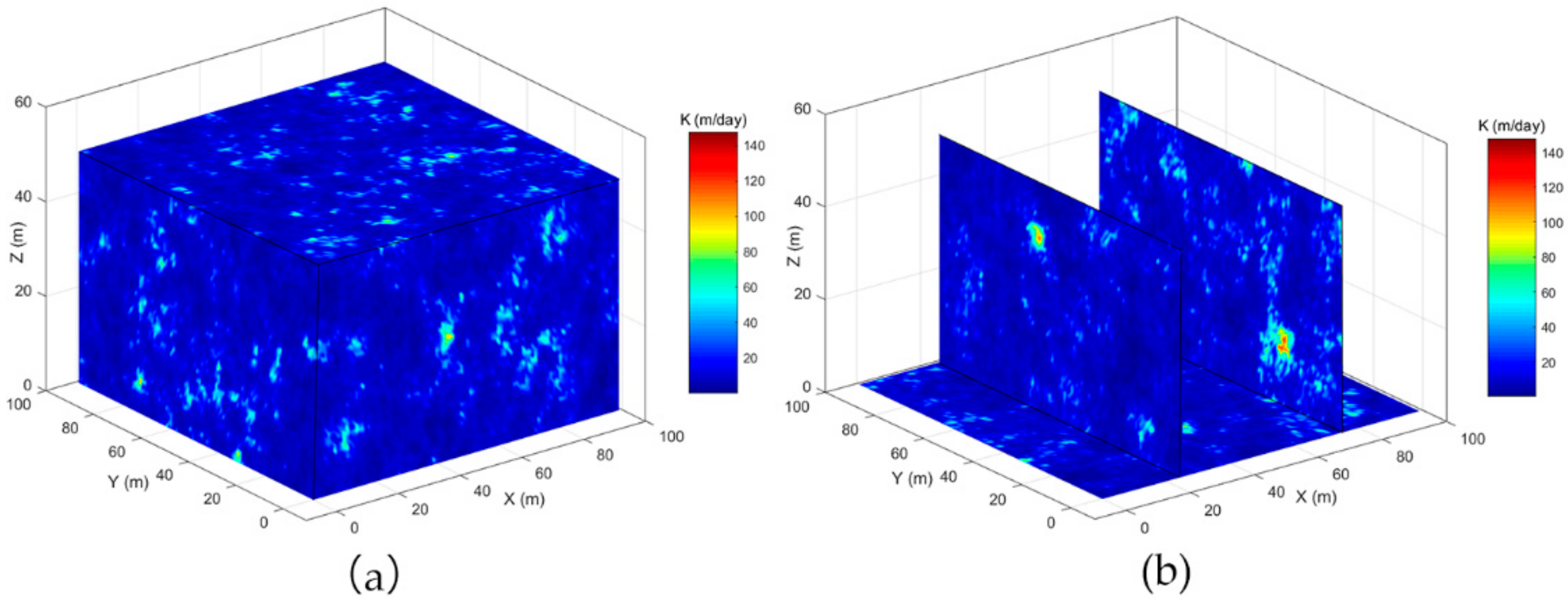
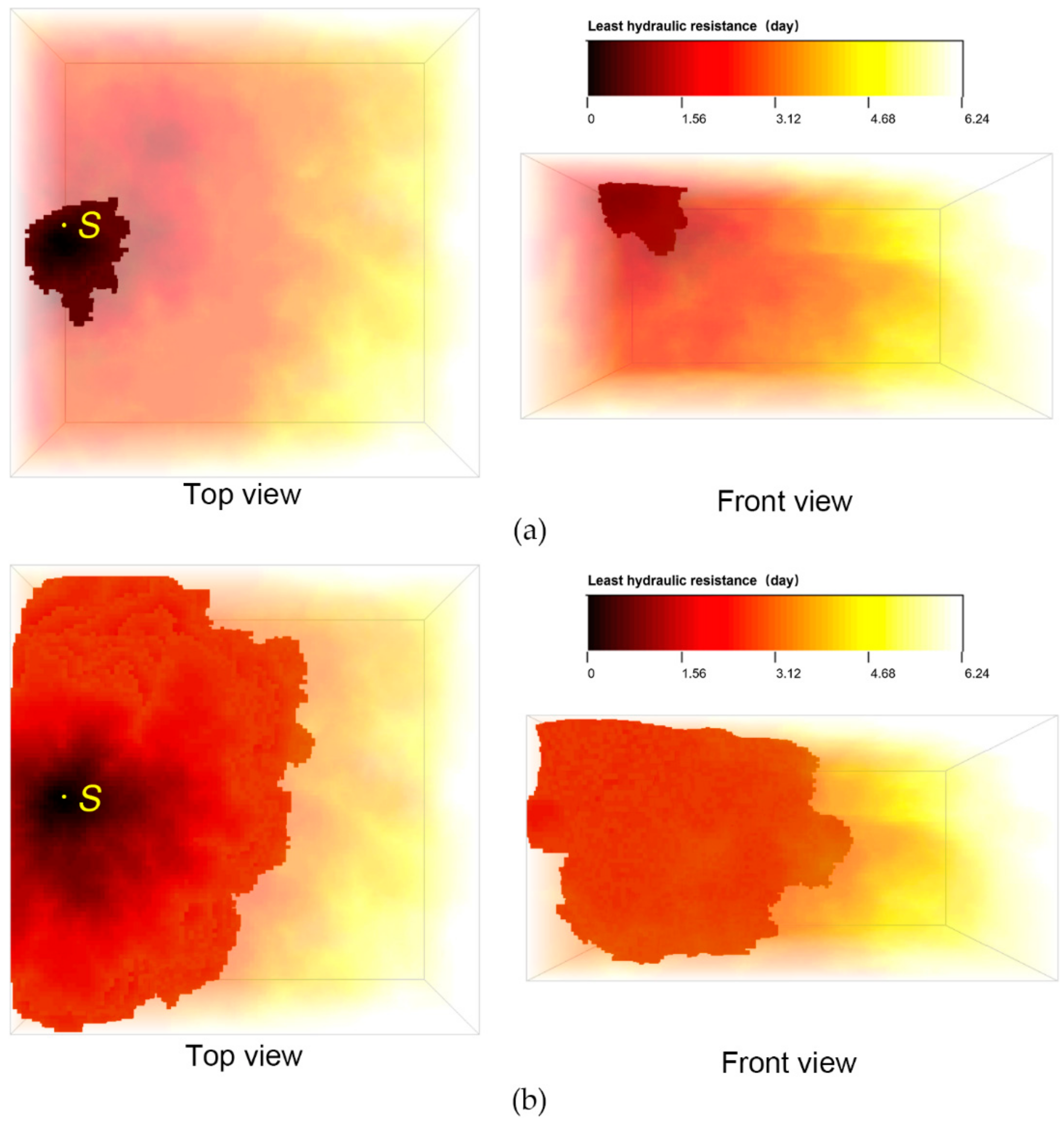
4.3. Minimum Hydraulic Resistance
5. Discussion
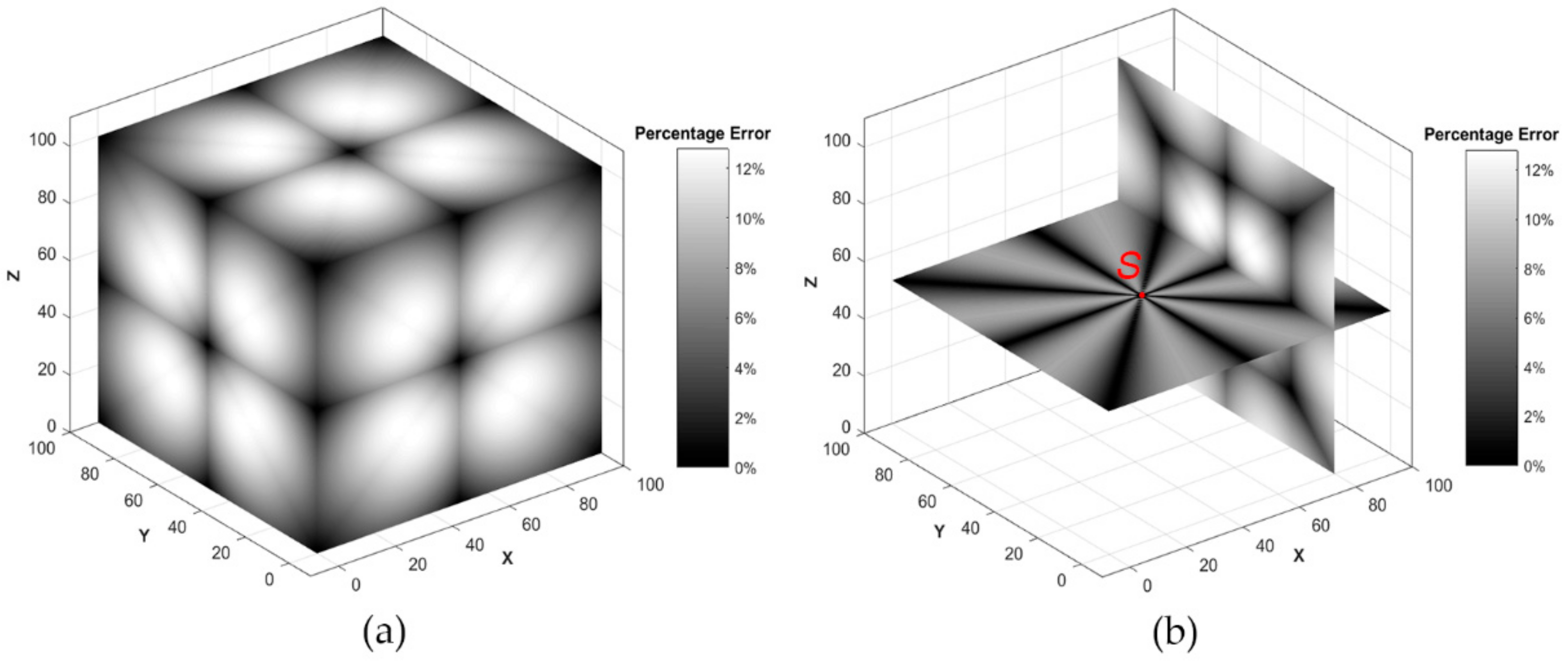
5.1. Error Analysis with Homogenous Friction
5.2. Impact of Friction Heterogeneity
5.3. Analysis of Time Efficiency
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bagli, S.; Geneletti, D.; Orsi, F. Routeing of power lines through least-cost path analysis and multicriteria evaluation to minimise environmental impacts. Environ. Impact Assess. Rev. 2011, 31, 234–239. [Google Scholar] [CrossRef]
- Durmaz, A.İ.; Ünal, E.Ö.; Aydın, C.C. Automatic Pipeline Route Design with Multi-Criteria Evaluation Based on Least-Cost Path Analysis and Line-Based Cartographic Simplification: A Case Study of the Mus Project in Turkey. ISPRS Int. J. Geo-Inf. 2019, 8, 173. [Google Scholar] [CrossRef]
- Beier, P.; Majka, D.R.; Newell, S.L. Uncertainty analysis of least-cost modeling for designing wildlife linkages. Ecol. Appl. A Publ. Ecol. Soc. Am. 2009, 19, 2067–2077. [Google Scholar] [CrossRef] [PubMed]
- Etherington, T.R. Least-Cost Modelling and Landscape Ecology: Concepts, Applications, and Opportunities. Curr. Landsc. Ecol. Rep. 2016, 1, 40–53. [Google Scholar] [CrossRef]
- Hare, T.S. Using measures of cost distance in the estimation of polity boundaries in the Postclassic Yautepec valley, Mexico. J. Archaeol. Sci. 2004, 31, 799–814. [Google Scholar] [CrossRef]
- Davies, G.; Whyatt, D. A least-cost approach to personal exposure reduction. Trans. GIS 2010, 13, 229–246. [Google Scholar] [CrossRef]
- Greenberg, J.A.; Rueda, C.; Hestir, E.L.; Santos, M.J.; Ustin, S.L. Least cost distance analysis for spatial interpolation. Comput. Geosci. 2011, 37, 272–276. [Google Scholar] [CrossRef]
- Stachelek, J.; Madden, C.J. Application of inverse path distance weighting for high-density spatial mapping of coastal water quality patterns. Int. J. Geogr. Inf. Sci. 2015, 29, 1240–1250. [Google Scholar] [CrossRef]
- Xu, J.; Lathrop, R.G. Improving simulation accuracy of spread phenomena in a raster-based Geographic Information System. Int. J. Geogr. Inf. Sci. 1995, 9, 153–168. [Google Scholar] [CrossRef]
- Collischonn, W.; Victorpilar, J. A direction dependent least-cost-path algorithm for roads and canals. Int. J. Geogr. Inf. Syst. 2000, 14, 397–406. [Google Scholar] [CrossRef]
- Li, X.; Larson, C.M.; Rex, A.B. Creating buffers on surfaces. Cartogr. Geogr. Inf. Sci. 2005, 32, 195–210. [Google Scholar] [CrossRef]
- Boroujerdi, A.; Uhlmann, J. An efficient algorithm for computing least cost paths with turn constraints. Inf. Process. Lett. 1998, 67, 317–321. [Google Scholar] [CrossRef]
- Gonçalves, A.B. An extension of GIS-based least-cost path modelling to the location of wide paths. Int. J. Geogr. Inf. Sci. 2010, 24, 983–996. [Google Scholar] [CrossRef]
- Shirabe, T. A method for finding a least-cost wide path in raster space. Int. J. Geogr. Inf. Sci. 2016, 30, 1469–1485. [Google Scholar] [CrossRef]
- Baek, J.; Choi, Y. A new algorithm to find raster-based least-cost paths using cut and fill operations. Int. J. Geogr. Inf. Sci. 2017, 31, 1–21. [Google Scholar] [CrossRef]
- Bemmelen, J.; Quak, W.; van Hekken, M.; Oosterom, P. Vector vs. raster-based algorithms for cross country movement planning. In Proceedings of the 11th International Symposium on Computer-Assisted Cartography, Minneapolis, Minnesota, USA, 30 October–1 November 1993; pp. 304–317. [Google Scholar]
- Liang, E.-H.; Lin, S.-G. A Hierarchical Approach to Distance Calculation Using the Spread Function. Int. J. Geogr. Inf. Sci. 1998, 12, 515–535. [Google Scholar] [CrossRef]
- Szczerba, R.J.; Chen, D.Z.; Uhran, J.J. Planning Shortest Paths among 2D and 3D Weighted Regions Using Framed-Subspaces. Int. J. Robot. Res. 1998, 17, 531–546. [Google Scholar] [CrossRef]
- Carsten, J.; Ferguson, D.; Stentz, A. 3D Field D: Improved Path Planning and Replanning in Three Dimensions. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 3381–3386. [Google Scholar]
- Namdari, M.; Reza Hejazi, S.; Palhang, M. Cornered Quadtrees/Octrees and Multiple Gateways Between Each Two Nodes; A Structure for Path Planning in 2D and 3D Environments. 3D Res. 2016, 7, 1–18. [Google Scholar] [CrossRef]
- Li, F.; Zlatanova, S.; Koopman, M.; Bai, X.; Diakité, A. Universal path planning for an indoor drone. Autom. Constr. 2018, 95, 275–283. [Google Scholar] [CrossRef]
- Bandi, S.; Thalmann, D. Path finding for human motion in virtual environments. Comput. Geom. 2000, 15, 103–127. [Google Scholar] [CrossRef]
- Tomlin, D. Digital Cartographic Modeling Techniques in Environmental Planning. Ph.D. Thesis, Yale University, New Haven, CT, USA, 1983. [Google Scholar]
- ESRI. How Cost Distance Tools Work. Available online: https://desktop.arcgis.com/en/arcmap/10.4/tools/spatial-analyst-toolbox/how-the-cost-distance-tools-work.htm (accessed on 11 January 2019).
- Reif, J.H.; Storer, J.A. 3-dimensional shortest paths in the presence of polyhedral obstacles. In Proceedings of the Mathematical Foundations of Computer Science, Berlin, Heidelberg, 10 August 1988; pp. 85–92. [Google Scholar]
- Jiang, K.; Seneviratne, L.D.; Earles, S.W.E. Finding the 3D shortest path with visibility graph and minimum potential energy. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots & Systems, Yokohama, Japan, 26–30 July 1993; pp. 679–684. [Google Scholar]
- Zlatanova, S.; Liu, L.; Sithole, G.; Zhao, J.; Mortari, F. Space Subdivision for Indoor Applications; GISt Report No. 66; Delft University of Technology, OTB Research Institute for the Built Environment: Delft, The Netherlands, 31 December 2014; pp. 1–51. [Google Scholar]
- Dao, T.H.D.; Thill, J.-C. Three-dimensional indoor network accessibility auditing for floor plan design. Trans. GIS 2017, 22, 288–310. [Google Scholar] [CrossRef]
- Liu, L.; Zlatanova, S.; Li, B.; van Oosterom, P.; Liu, H.; Barton, J. Indoor Routing on Logical Network Using Space Semantics. ISPRS Int. J. Geo-Inf. 2019, 8, 126. [Google Scholar] [CrossRef]
- Goodchild, M.F. An Evaluation of Lattice Solutions to the Problem of Corridor Location. Environ. Plan. A 1977, 9, 727–738. [Google Scholar] [CrossRef]
- Saha, A.; Arora, M.; Gupta, R.; Virdi, M.; Csaplovics, E. GIS-Based Route Planning in Landslide-Prone Areas. Int. J. Geogr. Inf. Sci. 2005, 19, 1149–1175. [Google Scholar] [CrossRef]
- Antikainen, H. Comparison of different strategies for determining raster-based least-cost paths with a minimum amount of distortion. Trans. GIS 2013, 17, 96–108. [Google Scholar] [CrossRef]
- Douglas, D.H. Least-cost Path in GIS Using an Accumulated Cost Surface and Slopelines. Cartographica 1994, 31, 37–51. [Google Scholar] [CrossRef]
- Tomlin, D. Propagating radial waves of travel cost in a grid. Int. J. Geogr. Inf. Sci. 2010, 24, 1391–1413. [Google Scholar] [CrossRef]
- Botea, A.; Müller, M.; Schaeffer, J. Near optimal hierarchical path-finding. J. Game Dev. 2004, 1, 7–28. [Google Scholar]
- Dijkstra, E.W. A Note on Two Problems in Connection with Graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Bresenham, J.E. Algorithm for Computer Control of a Digital Plotter. IBM Syst. J. 1965, 4, 25–30. [Google Scholar] [CrossRef]
- Amanatides, J.; Woo, A. A fast voxel traversal algorithm for ray tracing. In Proceedings of the Conference of the European Association for Computer Graphics, Amsterdam, The Netherlands, 8 August 1987; pp. 3–10. [Google Scholar]
- Atkinson, M.D.; Sack, J.R.; Santoro, N.; Strothotte, T. Min-max heaps and generalized priority queues. Commun. ACM 1986, 29, 996–1000. [Google Scholar] [CrossRef]
- Li, X.; Grady, C.J.; Peterson, A.T. Delineating Sea Level Rise Inundation Using a Graph Traversal Algorithm. Mar. Geod. 2014, 37, 267–281. [Google Scholar] [CrossRef]
- Fisher-Gewirtzman, D.; Shashkov, A.; Doytsher, Y. Voxel based volumetric visibility analysis of urban environments. Surv. Rev. 2013, 45, 451–461. [Google Scholar] [CrossRef]
- Rodriguez Cervilla, A.; Tabik, S.; Vías, J.; Merida, M.; Romero, L. Total 3D-viewshed Map: Quantifying the Visible Volume in Digital Elevation Models. Trans. GIS 2016, 21, 591–607. [Google Scholar] [CrossRef]
- Wassim, S.; Joliveau, T.; E, F. 3D Urban Visibility Analysis with Vector GIS Data. In Proceedings of the Geographical Information Systems Research UK (GISRUK), Portsmouth, UK, 27–29 April 2011; pp. 27–29. [Google Scholar]
- Rizzo, C.; de Barros, F. Minimum Hydraulic Resistance and Least Resistance Path in Heterogeneous Porous Media. Water Resour. Res. 2017, 53, 8596–8613. [Google Scholar] [CrossRef]
- Tyukhova, A.R.; Kinzelbach, W.; Willmann, M. Delineation of connectivity structures in 2-D heterogeneous hydraulic conductivity fields. Water Resour. Res. 2015, 51, 5846–5854. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Distance | Average Error (%) | Maximum Error (%) | Percentage Error (%) | |||
|---|---|---|---|---|---|---|
| 0% | 0%–1% | 0%–5% | >10% | |||
| 3D-Unmodified | 8.15 | 12.81 | 1.12 | 1.62 | 17.90 | 32.21 |
| 3D-Modified | 0.00 | 0.00 | 100.00 | 100.00 | 100.00 | 0.00 |
| 2D-Unmodified | 5.28 | 8.24 | 3.93 | 7.77 | 40.79 | 0.00 |
| Ratio of Heterogenous Friction Voxels | % Reduction in Distance | |
|---|---|---|
| Average | Maximum | |
| 10% | 6.85% | 11.35% |
| 30% | 3.94% | 11.31% |
| 50% | 0.82% | 11.13% |
| 70% | 0.28% | 5.22% |
| 90% | 0.27% | 2.02% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; She, J.; Li, X.; Zhang, S.; Tan, J. Accurate and Efficient Calculation of Three-Dimensional Cost Distance. ISPRS Int. J. Geo-Inf. 2020, 9, 353. https://doi.org/10.3390/ijgi9060353
Chen Y, She J, Li X, Zhang S, Tan J. Accurate and Efficient Calculation of Three-Dimensional Cost Distance. ISPRS International Journal of Geo-Information. 2020; 9(6):353. https://doi.org/10.3390/ijgi9060353
Chicago/Turabian StyleChen, Yaqian, Jiangfeng She, Xingong Li, Shuhua Zhang, and Junzhong Tan. 2020. "Accurate and Efficient Calculation of Three-Dimensional Cost Distance" ISPRS International Journal of Geo-Information 9, no. 6: 353. https://doi.org/10.3390/ijgi9060353
APA StyleChen, Y., She, J., Li, X., Zhang, S., & Tan, J. (2020). Accurate and Efficient Calculation of Three-Dimensional Cost Distance. ISPRS International Journal of Geo-Information, 9(6), 353. https://doi.org/10.3390/ijgi9060353