Exploring Resilient Observability in Traffic-Monitoring Sensor Networks: A Study of Spatial–Temporal Vehicle Patterns




Abstract
1. Introduction
- This paper improves our understanding of the resilient observability of traffic-monitoring sensor systems and shows promise for expanding how we make decisions regarding the design and management of such systems in large-scale projects.
- The identified limitations of the data and the sensor systems could be useful for similar urban mobility projects. As caveats for future projects, special attention should be paid to these limitations and implications at the early stages of projects in a more active and cautious way.
2. Literature Review
2.1. Data-Driven Analysis on Vehicle Mobility Patterns
2.2. Resilience in Sensor Systems
3. Methods
3.1. Sensor Networks and Centrality Measures
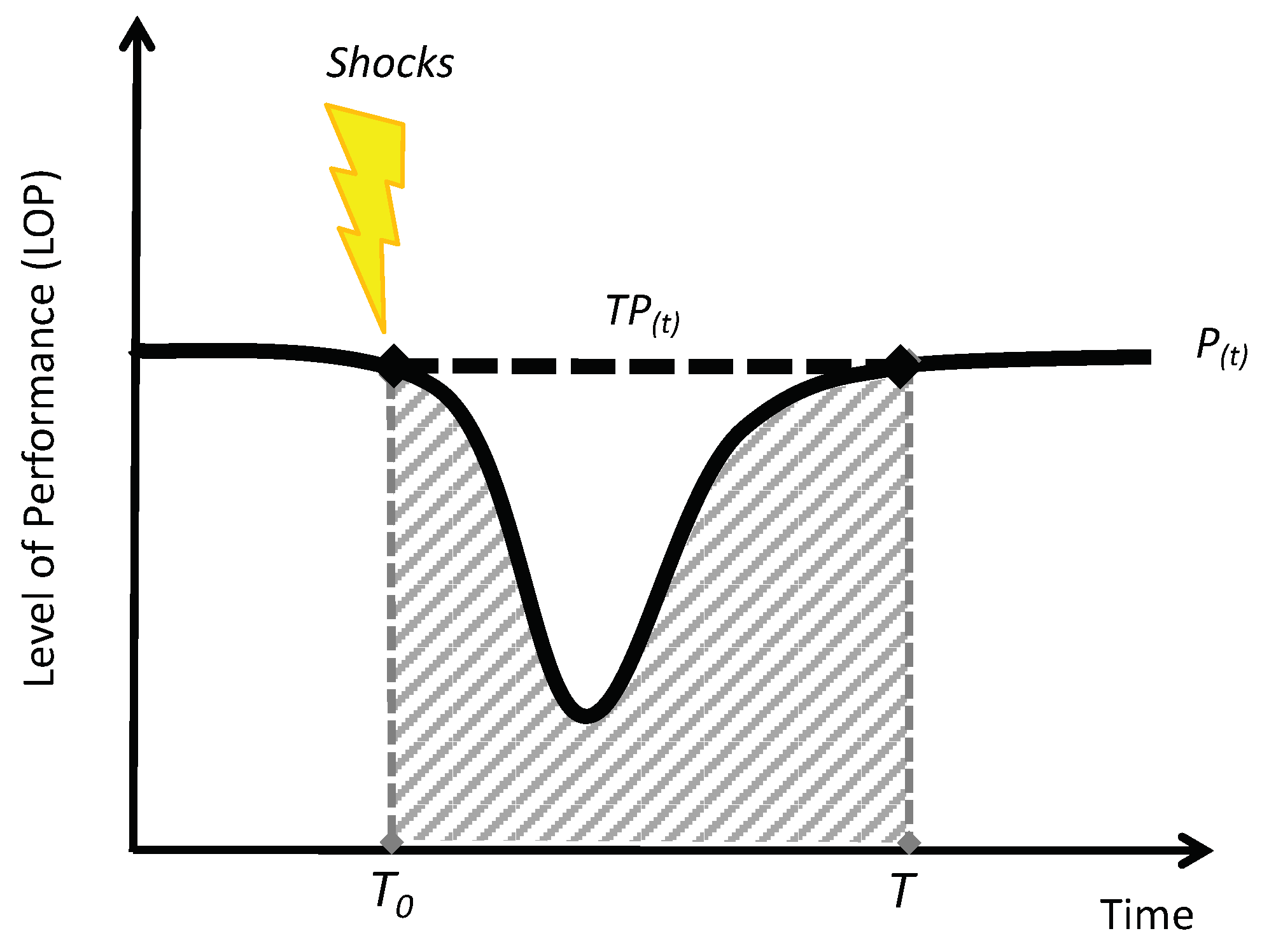
3.2. Resilience Paradigm and Assessment
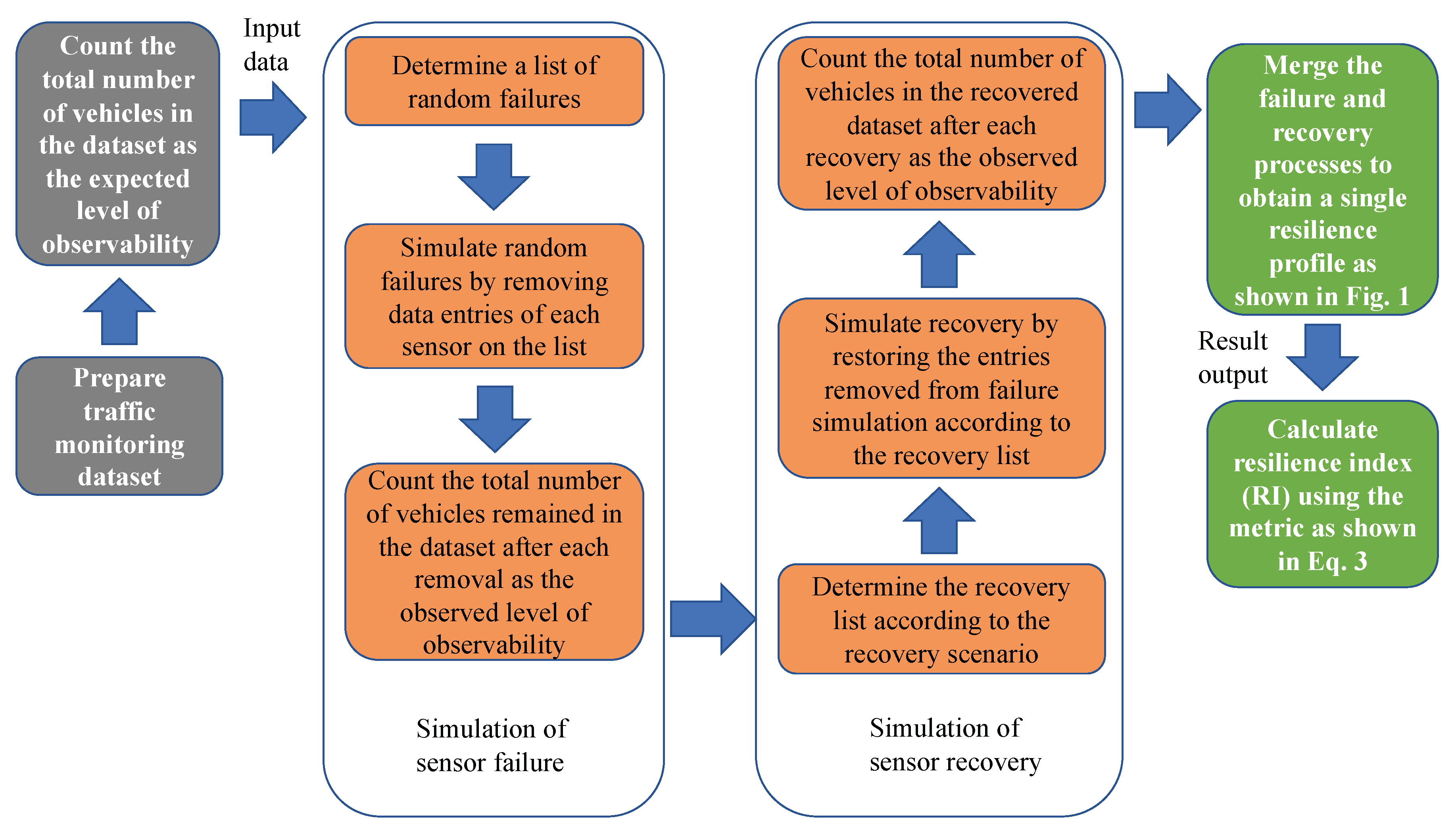
3.3. Resilience Simulation
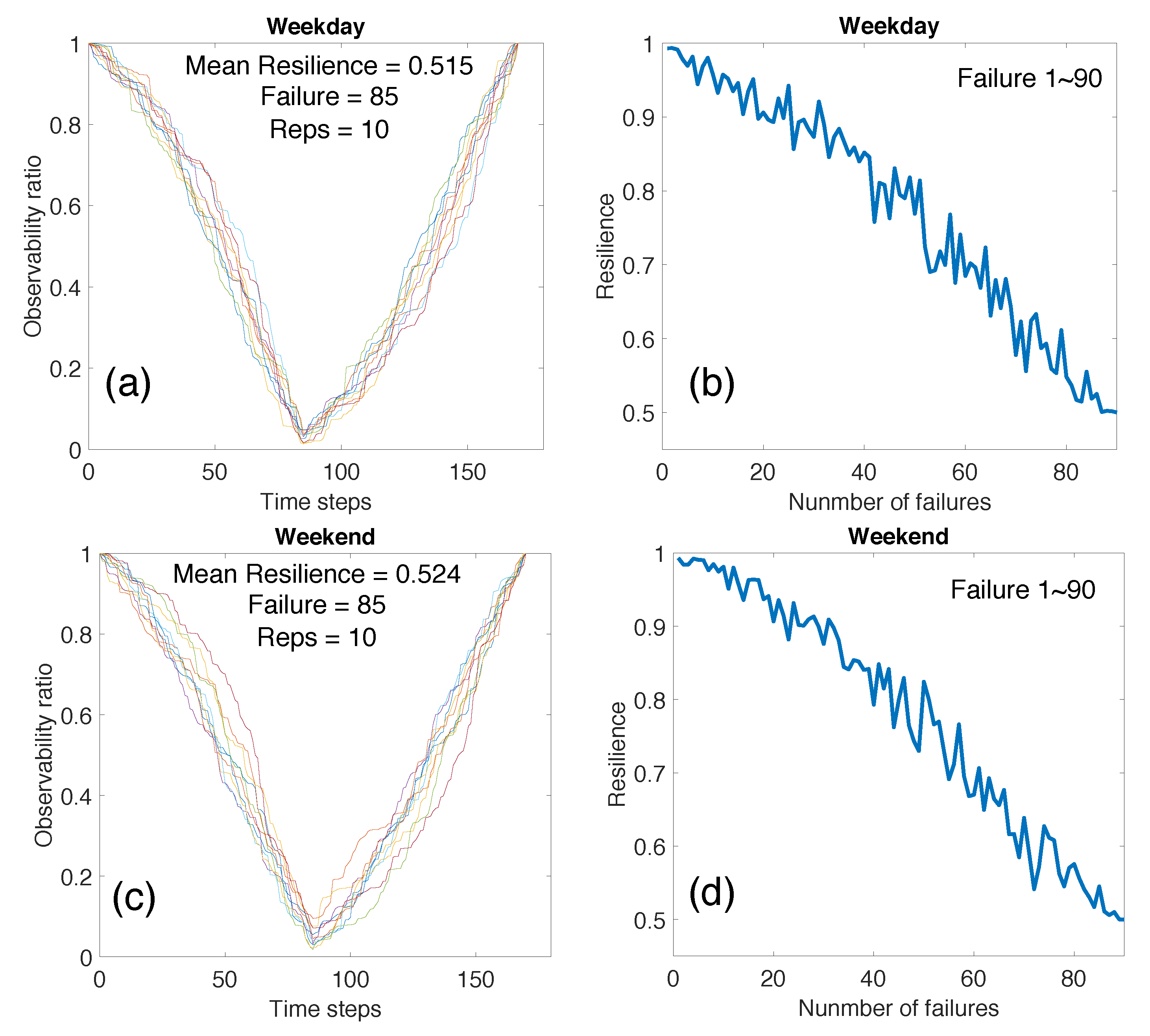
- Scenario 1—Control case: the control case is designed as random attacks with first-fail–first-repair recovery. This scenario simulates the most intuitive and basic strategy [56], where one can repair the failed sensors according to the sequence of their failures, i.e., in turn, sensors failed first would be repaired first, after the initial set of failures were completed.
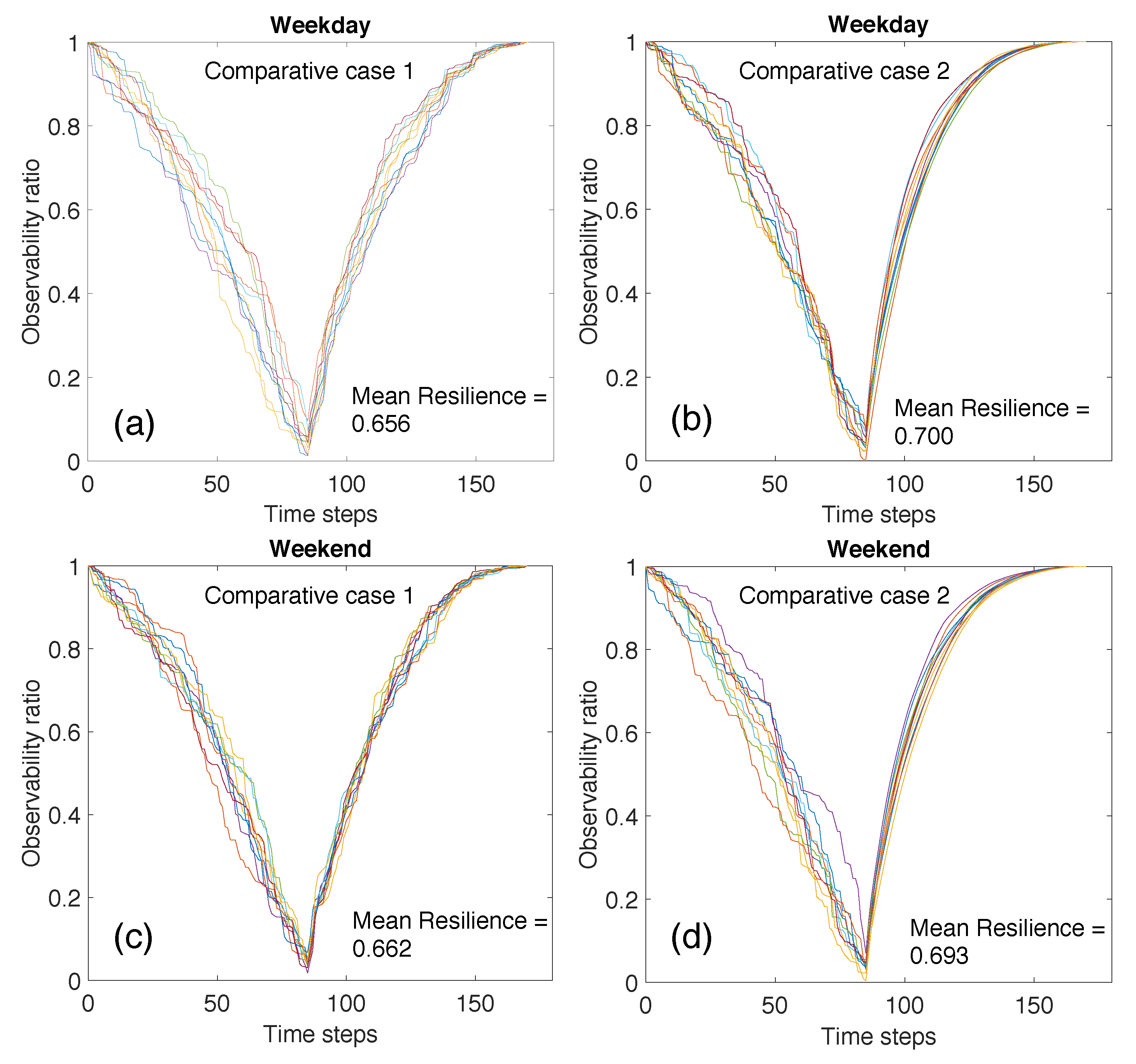
- Scenario 2—Comparative cases: this scenario is designed as random attacks with preferential recovery [57] and consists of two comparative cases. Comparative case 1 is to recover with a preferential sequence of failed sensors according to the betweenness centrality of the sensors in the network, i.e., the sequence of restoring the failed sensors follows the descending rank of betweenness centrality of the failed sensors. Comparative case 2 is to recover with a preferential sequence of failed sensors according to the sensor-level traffic volume, i.e., the restoring sequence follows the descending rank of observability of each individual sensor.
| Algorithm 1: Pseudocode for Monte Carlo simulations. |
 |
4. Study Area and Data Description
5. Spatial–Temporal Vehicle Mobility Patterns
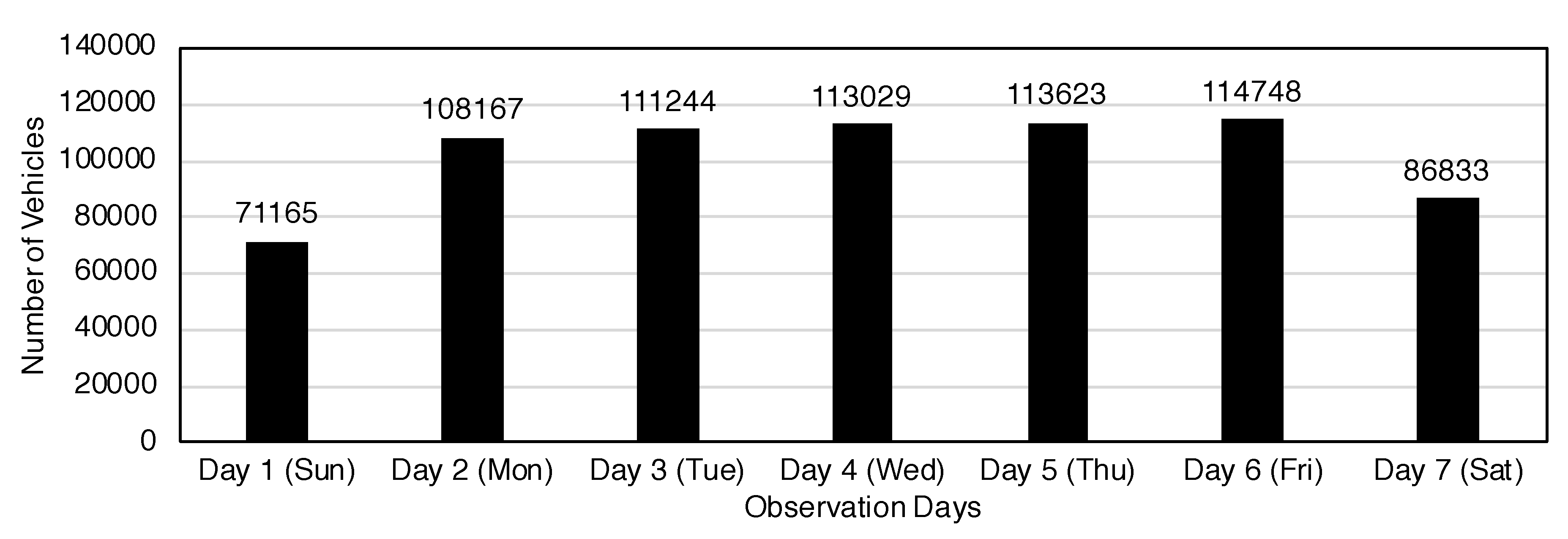
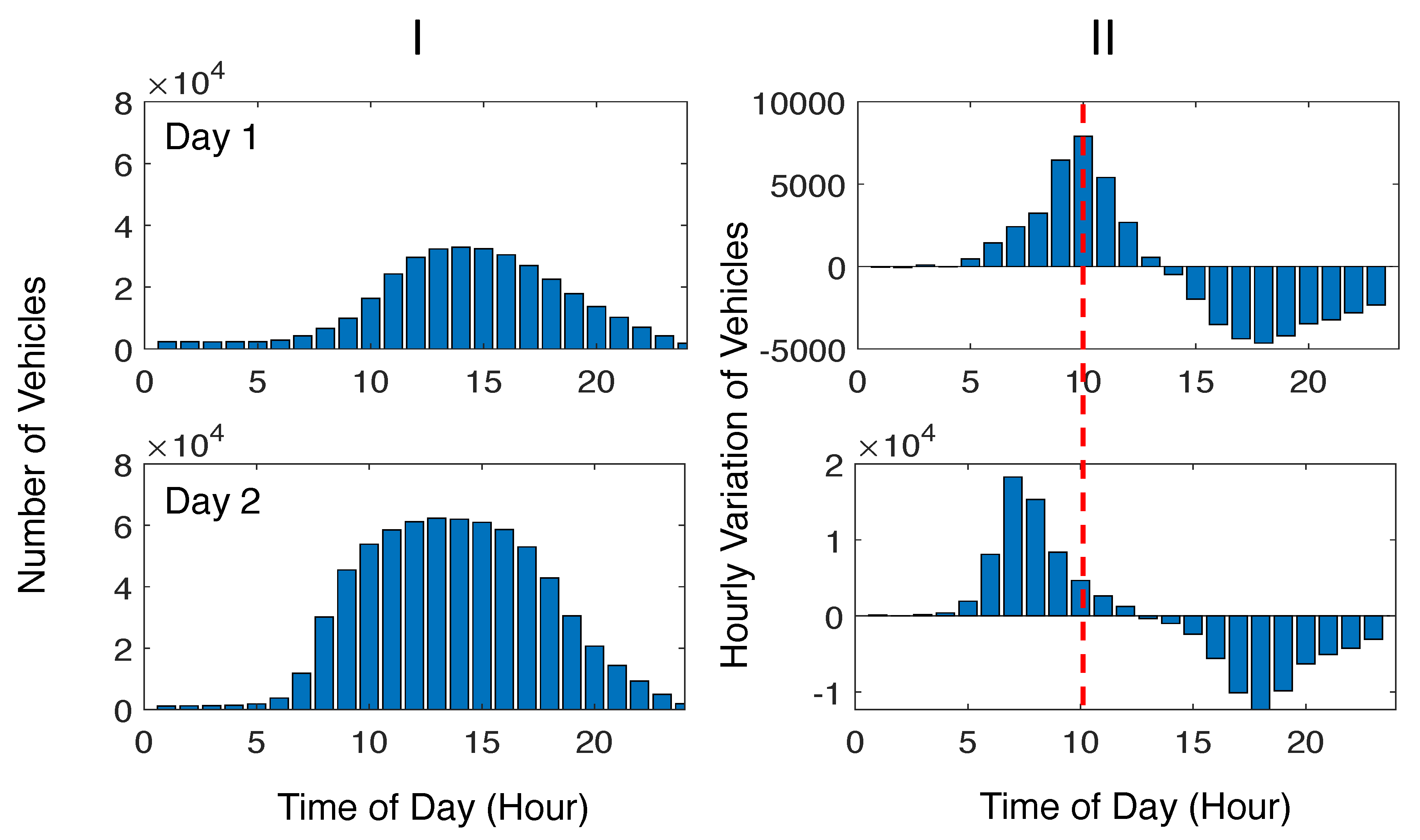
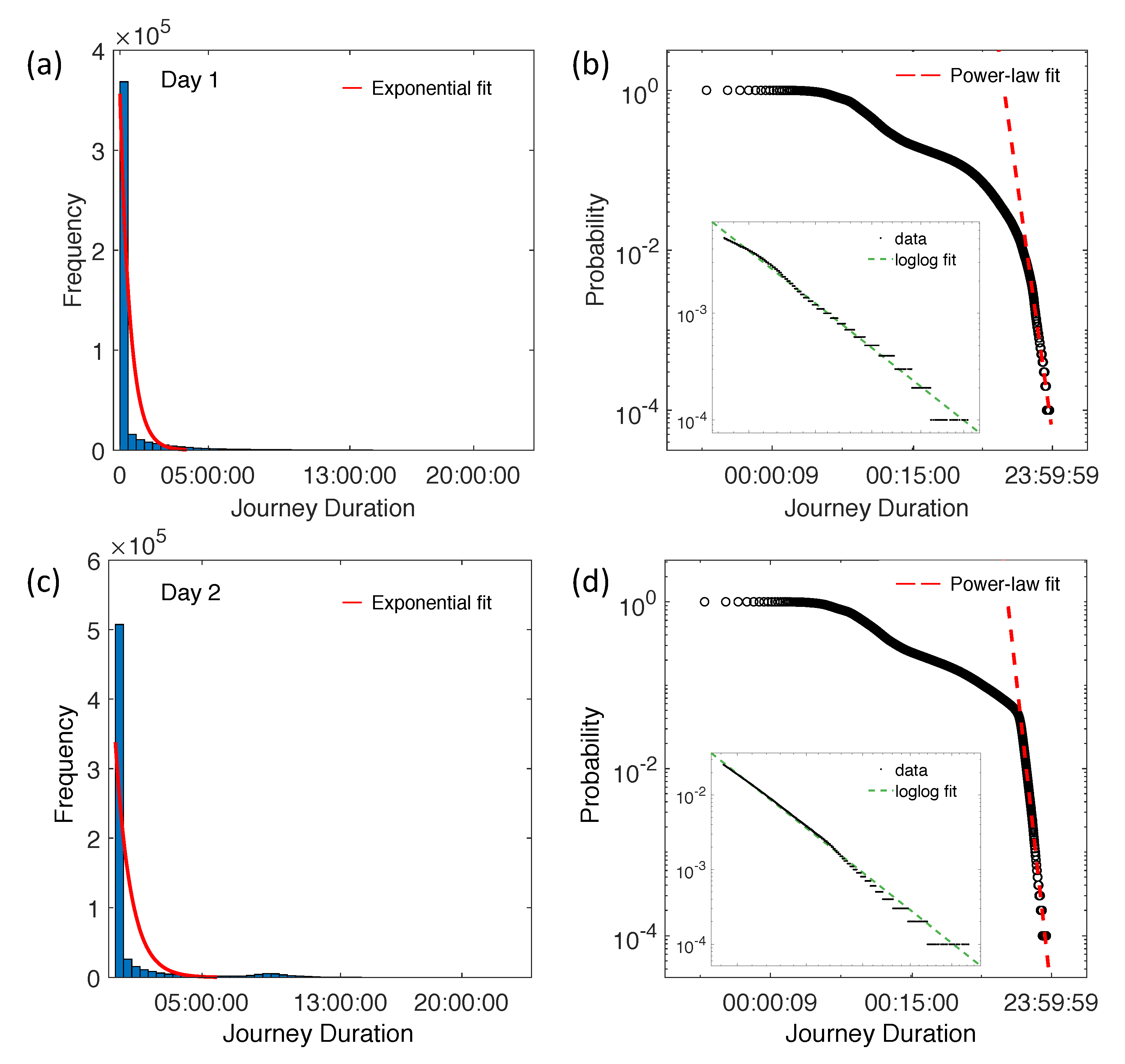
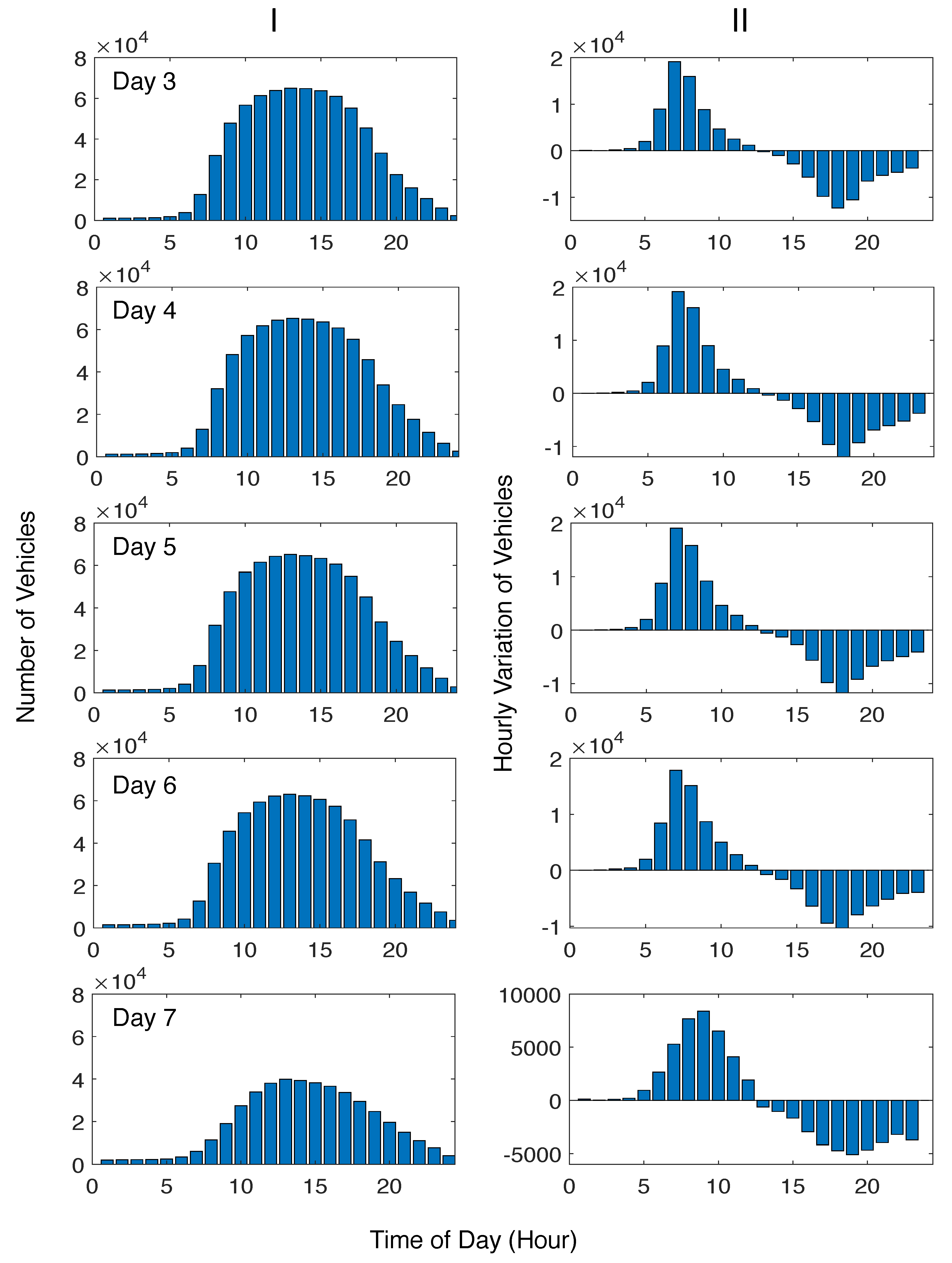
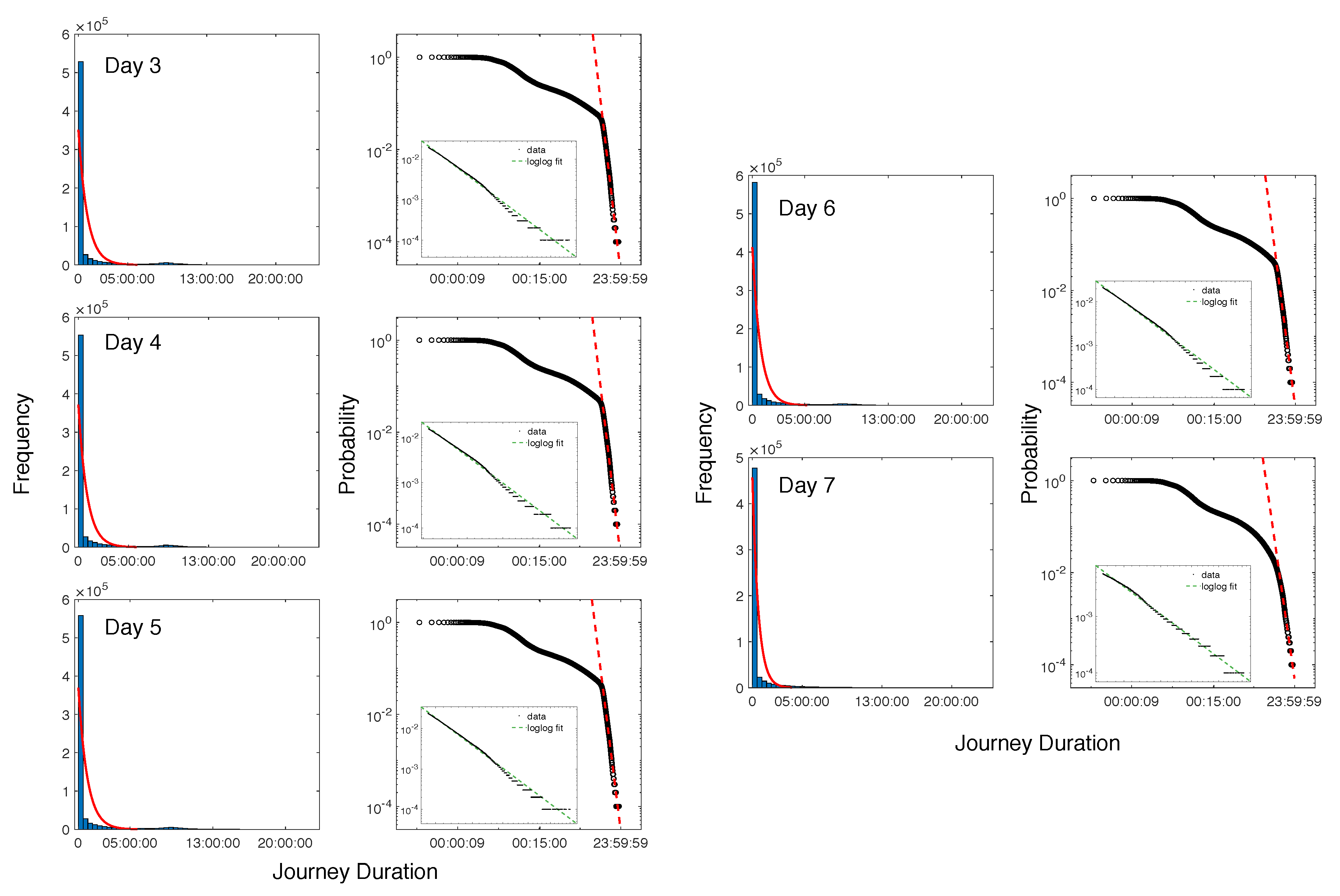
5.1. Temporal Analysis
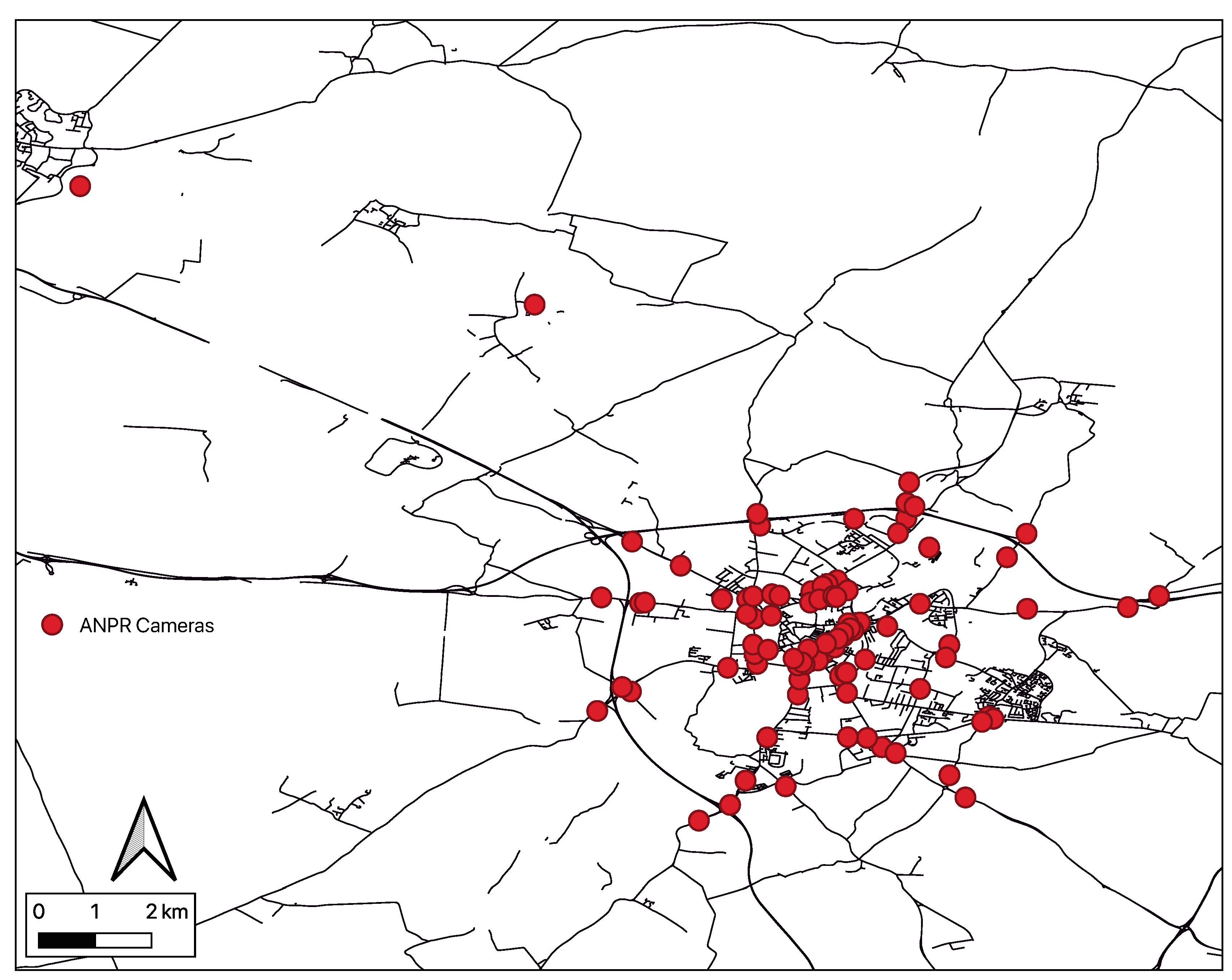
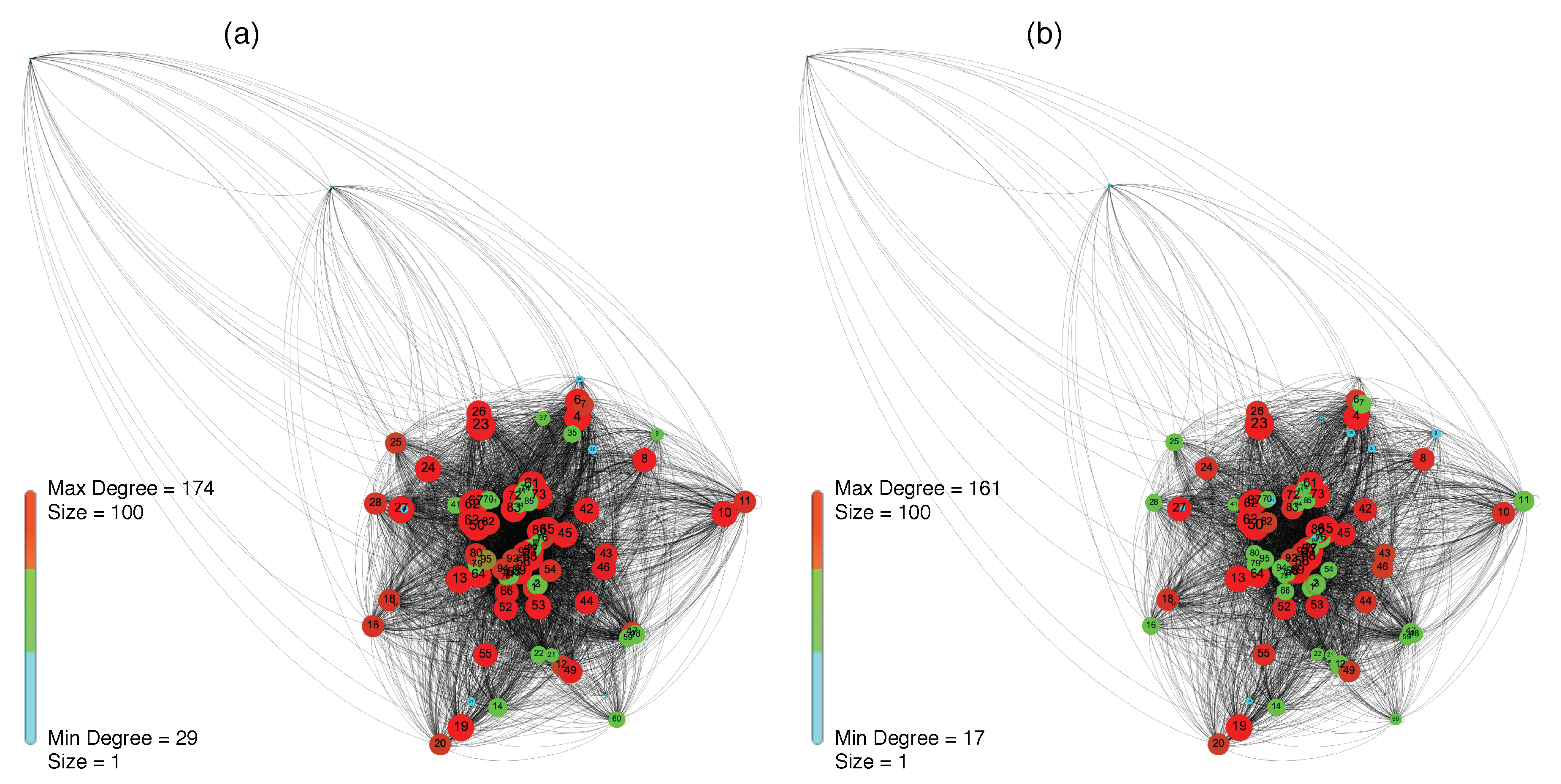
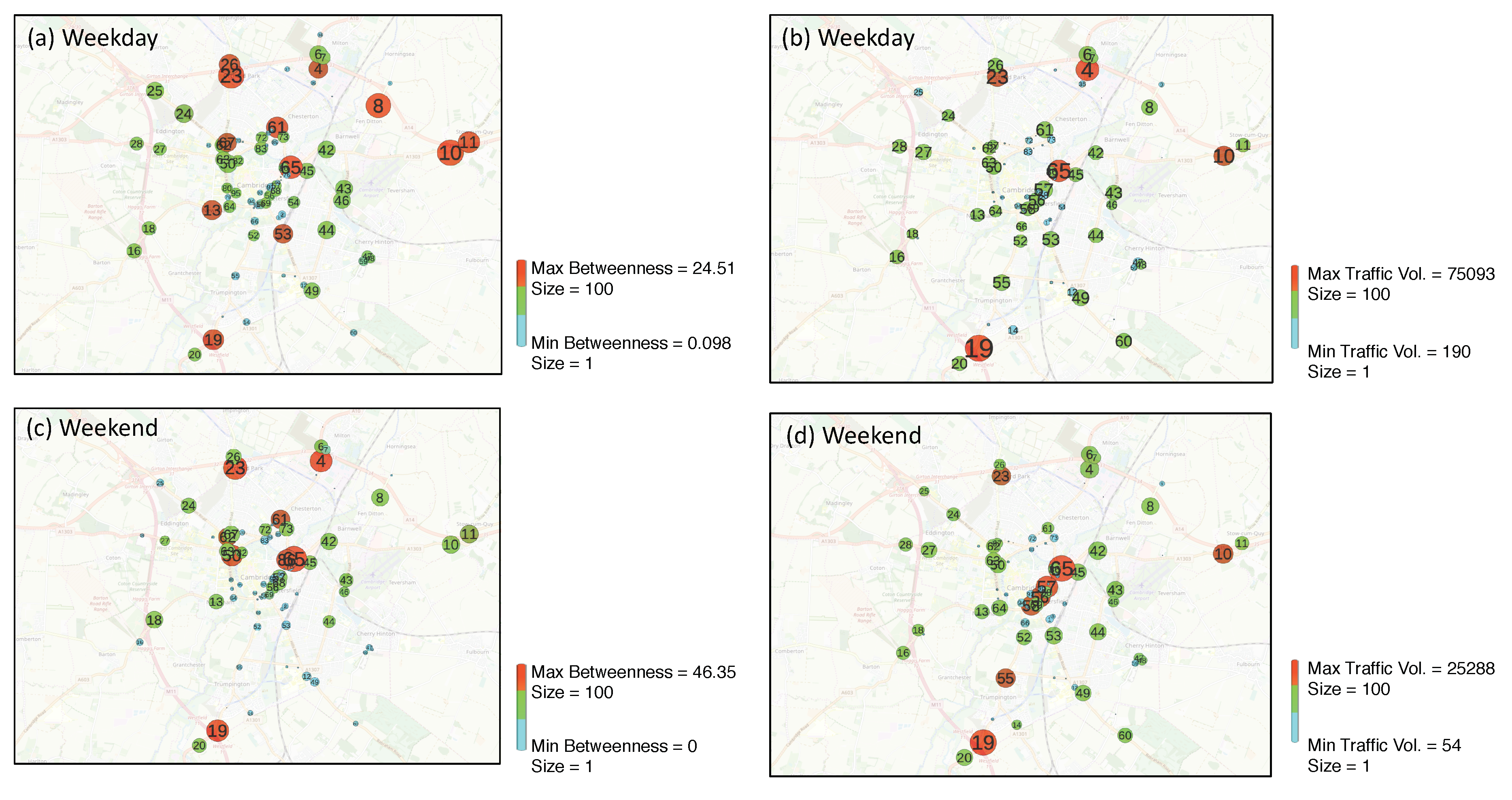
5.2. Spatial Analysis
6. Resilient Observability of Sensor Networks
6.1. Scenario 1: Control Case
6.2. Scenario 2: Comparative Cases
7. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| GPS | Global Positioning System |
| KPI | Key Performance Indicator |
| RI | Resilience Index |
| ANPR | Automatic Number Plate Recognition |
| HGV | Heavy Goods Vehicle |
| VRN | Vehicle ID |
Appendix A


References
- György, K.; Attila, A.; Tamás, F. New framework for monitoring urban mobility in European cities. Transp. Res. Proc. 2017, 24, 155–162. [Google Scholar] [CrossRef][Green Version]
- Lyons, G. Getting smart about urban mobility–aligning the paradigms of smart and sustainable. Transport. Res. A-Pol. 2018, 115, 4–14. [Google Scholar] [CrossRef]
- Fleming, A. The Case for … Making Low-Tech ‘dumb’ Cities Instead of ‘Smart’ Ones. Available online: https://www.theguardian.com/cities/2020/jan/15/the-case-for-making-low-tech-dumb-cities-instead-of-smart-ones (accessed on 16 April 2020).
- Tang, J. Assessment of resilience in complex urban systems. In Encyclopedia of the UN Sustainable Development Goals: Industry, Innovation and Infrastructure; Leal Filho, W., Azul, A., Brandli, L., Özuyar, P., Wall, T., Eds.; Springer: Cham, Switzerland, 2019; pp. 1–10. [Google Scholar]
- Zhao, K.; Tarkoma, S.; Liu, S.; Vo, H. Urban human mobility data mining: An overview. In Proceedings of the 2016 IEEE International Conference on Big Data (Big Data), Washington DC, USA, 5–8 December 2016; pp. 1911–1920. [Google Scholar]
- Hüging, H.; Glensor, K.; Lah, O. Need for a holistic assessment of urban mobility measures–Review of existing methods and design of a simplified approach. Transp. Res. Proc. 2014, 4, 3–13. [Google Scholar] [CrossRef][Green Version]
- Sun, L.; Axhausen, K.W. Understanding urban mobility patterns with a probabilistic tensor factorization framework. Transport. Res. B Meth. 2016, 91, 511–524. [Google Scholar] [CrossRef]
- Kumar, D.; Wu, H.; Lu, Y.; Krishnaswamy, S.; Palaniswami, M. Understanding urban mobility via taxi trip clustering. In Proceedings of the 2016 17th IEEE International Conference on Mobile Data Management (MDM), Porto, Portugal, 13–16 June 2016; pp. 318–324. [Google Scholar]
- Kumar, D.; Wu, H.; Rajasegarar, S.; Leckie, C.; Krishnaswamy, S.; Palaniswami, M. Fast and scalable big data trajectory clustering for understanding urban mobility. IEEE Trans. Intell. Transp. 2018, 19, 3709–3722. [Google Scholar] [CrossRef]
- Yang, T.; Jin, Y.; Yan, L.; Pei, P. Aspirations and realities of polycentric development: Insights from multi-source data into the emerging urban form of Shanghai. Environ. Plann. B 2019, 46, 1264–1280. [Google Scholar] [CrossRef]
- Serna, A.; Gerrikagoitia, J.K.; Bernabé, U.; Ruiz, T. Sustainability analysis on urban mobility based on social media content. Transp. Res. Proc. 2017, 24, 1–8. [Google Scholar] [CrossRef]
- Osorio-Arjona, J.; García-Palomares, J.C. Social media and urban mobility: Using twitter to calculate home-work travel matrices. Cities 2019, 89, 268–280. [Google Scholar] [CrossRef]
- Jerônimo, C.L.M.; Campelo, C.E.C.; de Souza Baptista, C. Using open data to analyze urban mobility from social networks. J. Inf. Data Manag. 2017, 8, 83–99. [Google Scholar]
- Tang, J.; Liu, F.; Wang, Y.; Wang, H. Uncovering urban human mobility from large scale taxi GPS data. Phys. A 2015, 438, 140–153. [Google Scholar] [CrossRef]
- Traunmueller, M.; Johnson, N.; Malik, A.; Kontokosta, C.E. Digital traces: Modeling urban mobility using WIFI probe data. In Proceedings of the The 6th International Workshop on Urban Computing (ACM KDD 2017), Halifax, NS, Canada, 14 August 2017; pp. 1–9. [Google Scholar]
- Rodrigues, D.O.; Boukerche, A.; Silva, T.H.; Loureiro, A.A.; Villas, L.A. Combining taxi and social media data to explore urban mobility issues. Comput. Commun. 2018, 132, 111–125. [Google Scholar] [CrossRef]
- Yang, Y.; Heppenstall, A.; Turner, A.; Comber, A. Who, where, why and when? Using smart card and social media data to understand urban mobility. ISPRS Int. J. Geo-Inf. 2019, 8, 271. [Google Scholar] [CrossRef]
- Liu, J.; Han, K.; Chen, X.M.; Ong, G.P. Spatial-temporal inference of urban traffic emissions based on taxi trajectories and multi-source urban data. Transport. Res. C-Emer. 2019, 106, 145–165. [Google Scholar] [CrossRef]
- Sperling, J.; Young, S.E.; Garikapati, V.; Duvall, A.L.; Beck, J. Mobility Data and Models Informing Smart Cities; Technical Report; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2019; pp. 1–73. [Google Scholar]
- Lotero, L.; Heredia, R.H.; Álvarez, P.J. Unveiling socioeconomic differences in Colombia by means of urban mobility complex networks. Memorias 2018, 1, 80–86. [Google Scholar] [CrossRef][Green Version]
- Yildirimoglu, M.; Kim, J. Identification of communities in urban mobility networks using multi-layer graphs of network traffic. Transport. Res. C-Emer. 2018, 89, 254–267. [Google Scholar] [CrossRef]
- Song, H.Y.; You, D. Modeling urban mobility with machine learning analysis of public taxi transportation data. Int. J. Pervas. Comp. Commun. 2018, 14, 73–87. [Google Scholar] [CrossRef]
- Zhang, F.; Wu, L.; Zhu, D.; Liu, Y. Social sensing from street-level imagery: A case study in learning spatio-temporal urban mobility patterns. ISPRS J. Photogramm. 2019, 153, 48–58. [Google Scholar] [CrossRef]
- Maggi, E.; Vallino, E. Understanding urban mobility and the impact of public policies: The role of the agent-based models. Res. Transp. Econ. 2016, 55, 50–59. [Google Scholar] [CrossRef]
- Tang, J.; Heinimann, H.; Khoja, L. Quantitative evaluation of consecutive resilience cycles in stock market performance: A systems-oriented approach. Phys. A 2019, 532, 121794. [Google Scholar] [CrossRef]
- Reggiani, A.; Nijkamp, P.; Lanzi, D. Transport resilience and vulnerability: The role of connectivity. Transport. Res. A-Pol. 2015, 81, 4–15. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, N. Resilience-based risk mitigation for road networks. Struct. Saf. 2016, 62, 57–65. [Google Scholar] [CrossRef]
- Brabhaharan, P. Recent advances in improving the resilience of road networks. In Proceedings of the New Zealand Society of Earthquake Engineering Conference 2006, Wellington, New Zealand, 1 April 2006; pp. 1–9. [Google Scholar]
- Wang, D.; Ip, W. Evaluation and analysis of logistic network resilience with application to aircraft servicing. IEEE Syst. J. 2009, 3, 166–173. [Google Scholar] [CrossRef]
- Zhao, K.; Kumar, A.; Harrison, T.P.; Yen, J. Analyzing the resilience of complex supply network topologies against random and targeted disruptions. IEEE Syst. J. 2011, 5, 28–39. [Google Scholar] [CrossRef]
- Murray-Tuite, P. Evaluation of Strategies to Increase Transportation System Resilience to Congestion Caused by Incidents; Technical Report; Mid-Atlantic University Transportation Center, Virginia Polytechnic Institute and State University: Blacksburg, VA, USA, 2008; pp. 1–63. [Google Scholar]
- Wang, Y.; Liu, H.; Han, K.; Friesz, T.L.; Yao, T. Day-to-day congestion pricing and network resilience. Transp. A 2015, 11, 873–895. [Google Scholar] [CrossRef]
- Luping, Y.; Dalin, Q. Vulnerability analysis of road networks. J. Transp. Syst. Eng. Inf. Tech. 2012, 12, 105–110. [Google Scholar]
- Wan, C.; Yang, Z.; Zhang, D.; Yan, X.; Fan, S. Resilience in transportation systems: A systematic review and future directions. Transp. Rev. 2018, 38, 479–498. [Google Scholar] [CrossRef]
- Faturechi, R.; Miller-Hooks, E. Measuring the performance of transportation infrastructure systems in disasters: A comprehensive review. J. Infrastruct. Syst. 2014, 21, 04014025. [Google Scholar] [CrossRef]
- Tukamuhabwa, B.R.; Stevenson, M.; Busby, J.; Zorzini, M. Supply chain resilience: Definition, review and theoretical foundations for further study. Int. J. Prod. Res. 2015, 53, 5592–5623. [Google Scholar] [CrossRef]
- Mattsson, L.G.; Jenelius, E. Vulnerability and resilience of transport systems–A discussion of recent research. Transport. Res. A-Pol. 2015, 81, 16–34. [Google Scholar] [CrossRef]
- Ghose, A.; Grossklags, J.; Chuang, J. Resilient data-centric storage in wireless ad-hoc sensor networks. In International Conference on Mobile Data Management; Springer: Berlin/Heidelberg, Germany, 2003; pp. 45–62. [Google Scholar]
- Erdene-Ochir, O.; Minier, M.; Valois, F.; Kountouris, A. Toward resilient routing in wireless sensor networks: Gradient-based routing in focus. In Proceedings of the 2010 Fourth International Conference on Sensor Technologies and Applications, Venice, Italy, 18–25 July 2010; pp. 478–483. [Google Scholar]
- Castillo, E.; Nogal, M.; Rivas, A.; Sánchez-Cambronero, S. Observability of traffic networks. Optimal location of counting and scanning devices. Transp. B 2013, 1, 68–102. [Google Scholar] [CrossRef]
- Castillo, E.; Grande, Z.; Calviño, A.; Szeto, W.Y.; Lo, H.K. A state-of-the-art review of the sensor location, flow observability, estimation, and prediction problems in traffic networks. J. Sens. 2015, 2015, 1–26. [Google Scholar] [CrossRef]
- Xu, X.; Lo, H.K.; Chen, A.; Castillo, E. Robust network sensor location for complete link flow observability under uncertainty. Transport. Res. B Meth. 2016, 88, 1–20. [Google Scholar] [CrossRef]
- Bianco, L.; Confessore, G.; Reverberi, P. A network based model for traffic sensor location with implications on O/D matrix estimates. Transport. Sci. 2001, 35, 50–60. [Google Scholar] [CrossRef]
- Zhou, X.; List, G.F. An information-theoretic sensor location model for traffic origin-destination demand estimation applications. Transport. Sci. 2010, 44, 254–273. [Google Scholar] [CrossRef]
- Rinaldi, M.; Viti, F. Exact and approximate route set generation for resilient partial observability in sensor location problems. Transport. Res. B Meth. 2017, 105, 86–119. [Google Scholar] [CrossRef]
- Marwan, N.; Donges, J.F.; Zou, Y.; Donner, R.V.; Kurths, J. Complex network approach for recurrence analysis of time series. Phys. Lett. A 2009, 373, 4246–4254. [Google Scholar] [CrossRef]
- Ben-Naim, E.; Frauenfelder, H.; Toroczkai, Z. Complex Networks; Springer-Verlag: Berlin/Heidelberg, Germany, 2004; pp. 35–37. [Google Scholar]
- Newman, M.E.; Barabási, A.L.E.; Watts, D.J. The Structure and Dynamics of Networks; Princeton University Press: Princeton, NJ, USA, 2006; pp. 1–8. [Google Scholar]
- Geisberger, R.; Sanders, P.; Schultes, D. Better approximation of betweenness centrality. In Proceedings of the 10th Workshop on Algorithm Engineering and Experiments (ALENEX), San Francisco, CA, USA, 19 January 2008; pp. 90–100. [Google Scholar]
- Sun, L.; Axhausen, K.W.; Lee, D.H.; Huang, X. Understanding metropolitan patterns of daily encounters. Proc. Natl. Acad. Sci. USA 2013, 110, 13774–13779. [Google Scholar] [CrossRef]
- Sharifi, A.; Yamagata, Y. Principles and criteria for assessing urban energy resilience: A literature review. Renew. Sust. Energ. Rev. 2016, 60, 1654–1677. [Google Scholar] [CrossRef]
- Linkov, I.; Eisenberg, D.A.; Plourde, K.; Seager, T.P.; Allen, J.; Kott, A. Resilience metrics for cyber systems. Env. Syst. Decis. 2013, 33, 471–476. [Google Scholar] [CrossRef]
- Ouyang, M.; Dueñas-Osorio, L. Time-dependent resilience assessment and improvement of urban infrastructure systems. Chaos 2012, 22, 033122. [Google Scholar] [CrossRef]
- Chen, P.Y.; Hero, A.O. Assessing and safeguarding network resilience to nodal attacks. IEEE Commun. Mag. 2014, 52, 138–143. [Google Scholar] [CrossRef]
- Ganin, A.A.; Massaro, E.; Gutfraind, A.; Steen, N.; Keisler, J.M.; Kott, A.; Mangoubi, R.; Linkov, I. Operational resilience: Concepts, design and analysis. Sci. Rep. 2016, 6, 19540. [Google Scholar] [CrossRef] [PubMed]
- Bhatia, U.; Kumar, D.; Kodra, E.; Ganguly, A.R. Network science based quantification of resilience demonstrated on the Indian Railways Network. PLoS ONE 2015, 10, e0141890. [Google Scholar] [CrossRef] [PubMed]
- Hu, F.; Yeung, C.H.; Yang, S.; Wang, W.; Zeng, A. Recovery of infrastructure networks after localised attacks. Sci. Rep. 2016, 6, 24522. [Google Scholar] [CrossRef]
- Mathworks. Trapezoidal Numerical Integration; MathWorks Matlab Toolbox: Natick, MA, USA, 2020; Available online: https://www.mathworks.com/help/matlab/ref/trapz.html (accessed on 16 April 2020).
- Cambridgeshire Insight Open Data. Greater Cambridge ANPR Data; Cambridgeshire County Council: Cambridge, UK, 2020; Available online: https://data.cambridgeshireinsight.org.uk (accessed on 16 April 2020).
- Bowers, K.; Buscher, V.; Dentten, R.; Edwards, M.; England, J.; Enzer, M.; Schooling, J.; Parlikad, A. Smart Infrastructure: Getting More from Strategic Assets; Technical Report; Cambridge Centre for Smart Infrastructure and Construction: Cambridge, UK, 2017; pp. 1–7. [Google Scholar]
- Tamvakis, P.; Xenidis, Y. Comparative evaluation of resilience quantification methods for infrastructure systems. Procd. Soc. Behv. 2013, 74, 339–348. [Google Scholar] [CrossRef]
- Fox-Lent, C.; Linkov, I. Resilience matrix for comprehensive urban resilience planning. In Resilience-Oriented Urban Planning; Springer International Publishing: Basel, Switzerland, 2018; pp. 29–47. [Google Scholar]
- Gutfraind, A. Optimizing topological cascade resilience based on the structure of terrorist networks. PLoS ONE 2010, 5, e13448. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Timestamp of Vehicle Entry (h/m/s) | VRN Vehicle ID | Entry Sensor ID | Timestamp of Vehicle Exit (h/m/s) | Exit Sensor ID | Journey Time |
|---|---|---|---|---|---|---|
| 17/06/2017 | 11:05:00 | 10001 | 4 | 11:13:12 | 83 | 0:08:12 |
| 17/06/2017 | 11:13:12 | 10001 | 83 | 11:15:12 | 56 | 0:02:00 |
| 17/06/2017 | 11:15:12 | 10001 | 56 | 12:45:12 | 3 | 1:30:00 |
| ... | ... | ... | ... | ... | ... | ... |
| 17/06/2017 | 11:15:00 | 10002 | 20 | 11:16:00 | 19 | 0:01:00 |
| 17/06/2017 | 11:16:00 | 10002 | 19 | 14:16:00 | 9 | 3:00:00 |
| 17/06/2017 | 14:16:00 | 10002 | 9 | 18:20:00 | 1 | 4:04:00 |
| ... | ... | ... | ... | ... | ... | ... |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, J.; Wan, L.; Nochta, T.; Schooling, J.; Yang, T. Exploring Resilient Observability in Traffic-Monitoring Sensor Networks: A Study of Spatial–Temporal Vehicle Patterns. ISPRS Int. J. Geo-Inf. 2020, 9, 247. https://doi.org/10.3390/ijgi9040247
Tang J, Wan L, Nochta T, Schooling J, Yang T. Exploring Resilient Observability in Traffic-Monitoring Sensor Networks: A Study of Spatial–Temporal Vehicle Patterns. ISPRS International Journal of Geo-Information. 2020; 9(4):247. https://doi.org/10.3390/ijgi9040247
Chicago/Turabian StyleTang, Junqing, Li Wan, Timea Nochta, Jennifer Schooling, and Tianren Yang. 2020. "Exploring Resilient Observability in Traffic-Monitoring Sensor Networks: A Study of Spatial–Temporal Vehicle Patterns" ISPRS International Journal of Geo-Information 9, no. 4: 247. https://doi.org/10.3390/ijgi9040247
APA StyleTang, J., Wan, L., Nochta, T., Schooling, J., & Yang, T. (2020). Exploring Resilient Observability in Traffic-Monitoring Sensor Networks: A Study of Spatial–Temporal Vehicle Patterns. ISPRS International Journal of Geo-Information, 9(4), 247. https://doi.org/10.3390/ijgi9040247